
田植機
【課題】 植付部及び施肥部の複数条毎の駆動の入切を行うユニットクラッチを備えた田植機において、ユニットクラッチの入切操作による欠株の発生を防止する。
【解決手段】 苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチ(49)(50)(51)と、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチ(58)(59)(60)と、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチ(64)(65)(66)とを設けると共に、苗載台(16)の左右移動端を検出する苗台検出部材(114)(115)を設け、該苗台検出部材(114)(115)の検出に基づいて各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を行うように構成した。
【解決手段】 苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチ(49)(50)(51)と、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチ(58)(59)(60)と、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチ(64)(65)(66)とを設けると共に、苗載台(16)の左右移動端を検出する苗台検出部材(114)(115)を設け、該苗台検出部材(114)(115)の検出に基づいて各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を行うように構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は苗載台及び植付爪を備えて連続的に苗植作業を行う田植機にあって、植付条の側方に施肥を同時に行う田植機に関する。
【背景技術】
【0002】
従来から、植付部や施肥部の複数条分毎の駆動の入切を行う複数のユニットクラッチを備えた田植機が知られている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
このような田植機にあっては、枕地などで苗載台の左右移動途中にユニットクラッチを切とさせて苗植付爪による苗取動作などを停止させると、次回ユニットクラッチを入とさせる次回植付作業時には、左右移動する苗載台の苗取位置と苗植付爪位置との間にはずれが発生して、何株かは欠株となる不都合があった。
【課題を解決するための手段】
【0004】
したがって請求項1に記載した発明における田植機は、苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチと、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチと、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチとを設けると共に、苗植付爪及び苗縦送りユニットクラッチを作動する植付ユニット駆動部材と、施肥ユニットクラッチを作動する施肥ユニット駆動部材とを設ける田植機において、苗載台の左右移動端を検出する苗台検出部材を設け、該苗台検出部材の検出に基づいて前記各ユニットクラッチの入切を行うように構成したことを特徴とするものである。
【0005】
また、請求項2に記載した発明は、請求項1に記載した田植機において、苗載台の左右移動端時に植付クラッチを切として苗載台の左右動を停止させる苗台停止スイッチを設けたことを特徴とするものである。
【0006】
また、請求項3に記載した発明は、請求項1に記載の田植機において、前記苗植付爪ユニットクラッチ、前記苗縦送りユニットクラッチ、前記施肥ユニットクラッチの少なくともいずれか1つを切操作したときには、前記施肥部の肥料の繰出しは即座に切とするが、前記苗植付爪の駆動は前記苗台検出部材が前記苗載台の左右移動端を検出するまでは切としないことを特徴とするものである。
【発明の効果】
【0007】
請求項1に記載した発明によれば、各ユニットクラッチの入切を苗載台の左右移動端で行い、ユニットクラッチの切から入時には苗載台の左右一端から常に苗取りを行って、欠株の発生を確実に防止して、枕地作業などでの植付精度を向上させることができる。
【0008】
請求項2に記載した発明によれば、苗載台の左右移動端時に植付クラッチを切として苗載台の駆動を停止させる苗台停止スイッチを設けているから、停止スイッチのオン時には苗載台を左右移動端で停止させ植付クラッチを切として、作業開始前の苗継ぎ作業などでの操作性を向上させることができる。
【0009】
請求項3に記載した発明によれば、機体旋回直後などで植付クラッチの入状態で機体を停止させて各ユニットクラッチを切操作したときには、苗載台が左右移動端となるまでは苗取りを行って欠株を防止すると共に、施肥は即時に中断させて過剰な施肥を防止して生育むらの発生など解消させることができる。
【発明を実施するための最良の形態】
【0010】
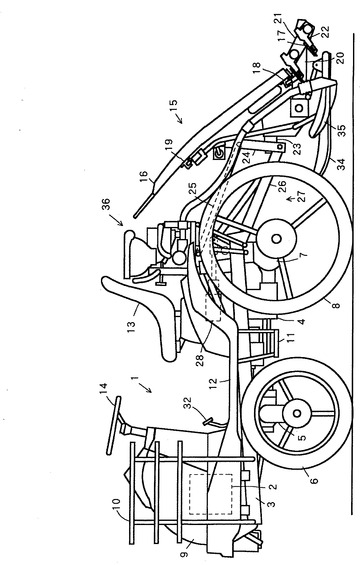
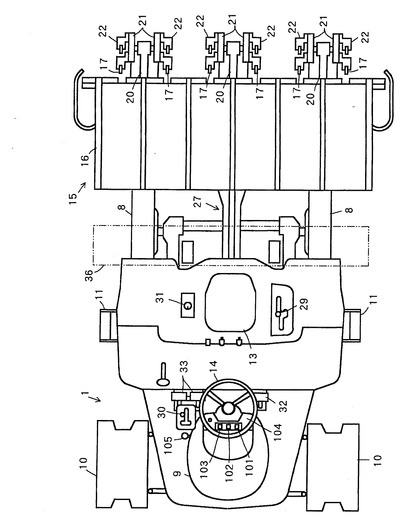
以下、本発明の実施例を図面に基づいて詳述する。図1は乗用田植機の側面図、図2は同平面図を示し、図中(1)は作業者が搭乗する走行機体である走行車であり、エンジン(2)を車体フレーム(3)前部上方に搭載させ、ミッションケース(4)前方にフロントアクスルケース(5)を介して水田走行用前輪(6)を支持させると共に、前記ミッションケース(4)の後部にリヤアクスルケース(7)を連設し、前記リヤアクスルケース(7)に車輪である水田走行用後輪(8)を支持させる。そして前記エンジン(2)等を覆うボンネット(9)両側に予備苗載台(10)を取付けると共に、足掛台(11)を介して作業者が搭乗する車体カバーであるステップ(12)によって前記ミッションケース(4)等を覆い、前記ステップ(12)上部に運転席(13)を取付け、その運転席(13)の前方で前記ボンネット(9)後部に操向ハンドル(14)を設ける。
【0011】
また、図中(15)は6条植え用の苗載台(16)並びに複数の苗植付爪(17)などを具備する植付部であり、前高後低の合成樹脂製の前傾式苗載台(16)を下部レール(18)及びガイドレール(19)を介して植付ケース(20)に左右往復摺動自在に支持させると共に、一方向に等速回転させるロータリケース(21)を前記植付ケース(20)に支持させ、該ケース(21)の回転軸芯を中心に対称位置に一対の爪ケース(22)(22)を配設し、その爪ケース(22)(22)先端に植付爪(17)(17)を取付ける。また前記植付ケース(20)の前側にローリング支点軸(23)を介して支持フレーム(24)を設け、トップリンク(25)及びロワーリンク(26)を含むリンク機構(27)を介して走行車(1)後側に支持フレーム(24)を連結させ、前記リンク機構(27)を介して植付部(15)を昇降させる昇降シリンダ(28)をロワーリンク(26)に連結させ、前記前後輪(6)(8)を走行駆動して移動すると同時に、左右に往復摺動させる苗載台(16)から一株分の苗を植付爪(17)によって取出し、連続的に苗植え作業を行うように構成する。
【0012】
また、図中(29)は主変速レバー、(30)は植付昇降レバー、(31)は植付け感度設定器、(32)は主クラッチペダル、(33)(33)は左右ブレーキペダル、(34)は2条分均平用センターフロート、(35)は2条分均平用サイドフロート、(36)は6条用の施肥部である施肥機である。
【0013】
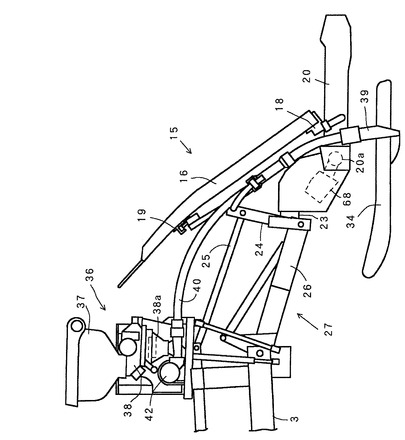
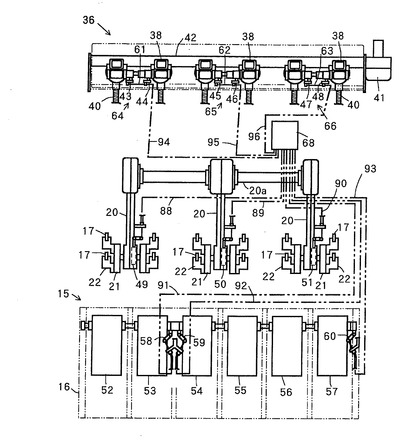
さらに、図3、図4に示す如く、肥料を入れる肥料ホッパ(37)と、肥料を定量供給する肥料繰出部である肥料繰出ケース(38)と、フロート(34)(35)の側条作溝器(39)にフレキシブル形搬送ホース(40)を介して肥料を排出させるターボブロワー型送風機(41)と円筒形のエアタンク(42)とを前記施肥機(36)に備え、繰出ケース(38)から繰出される肥料を送風機(41)からの空気流によって作溝器(39)に搬送して施肥を行うように構成している。
【0014】
また、各繰出ケース(38)内の繰出ロールなど繰出部材(38a)の駆動の入切をそれぞれ行う第1〜第6施肥クラッチ(43)(44)(45)(46)(47)(48)と、中央及び左右の植付ケース(20)に内設して中央2条及び左右各2条の苗植付爪(17)を1組として駆動の入切を行う3つの第1〜第3苗植付爪ユニットクラッチ(49)(50)(51)と、前記苗載台(10)の6条用第1〜第6苗縦送りベルト(52)(53)(54)(55)(56)(57)の中央2条及び左右各2条を1組として駆動の入切を行う3つの第1〜第3縦送りユニットクラッチ(58)(59)(60)とを備え、前記施肥クラッチ(43)〜(48)の中央2条及び左右各2条を1組として3本の各クラッチワイヤ(61)(62)(63)で相互に連結させて中央2条及び左右各2条の3つの第1〜第3施肥ユニットクラッチ(64)(65)(66)を構成させ、中央2条及び左右各2条分の繰出部材(38a)・苗取出爪(17)・苗縦送りベルト(52)〜(57)の駆動の入切を単独で操作可能に設けている。
【0015】
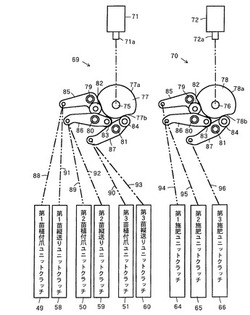
また中央及び右植付ケース(20)間の伝動軸ケース(20a)に2つの植付及び施肥ユニットケース(67a)(67b)有するユニットケース体(68)を固設させ、各ユニットケース(67a)(67b)内に中央2条及び左右各2条分毎の繰出部材(38a)・苗取出爪(17)・苗縦送りベルト(52)〜(57)の駆動の入切を行う植付及び施肥ユニットクラッチ用作動装置(69)(70)をそれぞれ設けている。
【0016】
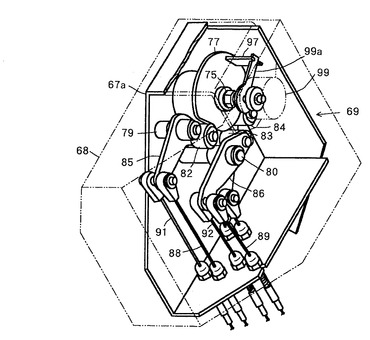
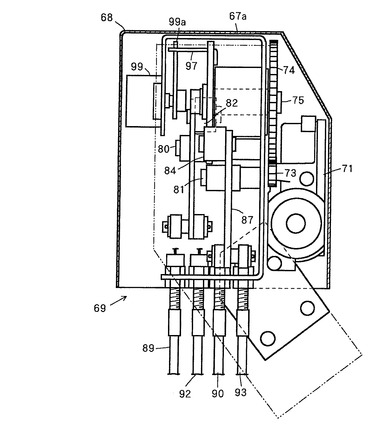
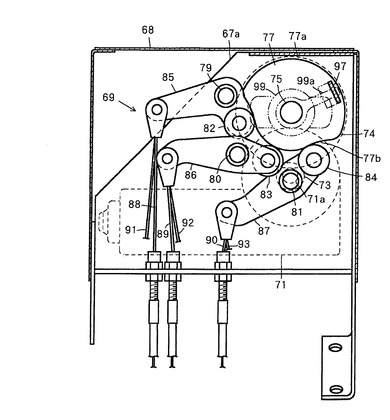
前記作動装置(69)(70)は、植付及び施肥ユニット駆動部材である電動式の植付及び施肥モータ(71)(72)と、該モータ(71)(72)のモータ軸(71a)(72a)に1対の減速ギヤ(73)(74)を介し連動連結させる植付及び施肥カム軸(75)(76)と、該カム軸(75)(76)に固設して周面に凹凸のカム面(77a)(77b)・(78a)(78b)を有する植付及び施肥カム体(77)(78)と、ユニットケース(67)(68)に中央部を各支軸(79)(80)(81)を介し揺動自在に支持させて前記カム面(77a)(77b)・(78a)(78b)に転接させるローラ(82)(83)(84)を一端側に有する中央及び左右各2条ユニットクラッチ用の第1〜第3作動アーム(85)(86)(87)とをそれぞれ備え、植付ユニットクラッチ用作動装置(69)の各作動アーム(85)(86)(87)の他端側を各苗植付爪用第1〜第3クラッチワイヤ(88)(89)(90)及び苗縦送り用第1〜第3クラッチワイヤ(91)(92)(93)を介して前記第1〜第3苗植付爪ユニットクラッチ(49)(50)(51)及び苗縦送りユニットクラッチ(58)(59)(60)に連動連結させて、カム体(77)による第1作動アーム(85)の揺動で第1苗植付爪及び苗縦送りユニットクラッチ(49)(58)を、第2揺動アーム(86)の揺動で第2苗植付爪及び苗縦送りユニットクラッチ(50)(59)を、第3揺動アーム(87)の揺動で第3苗植付爪及び苗縦送りユニットクラッチ(51)(60)の入切を行うように構成すると共に、施肥ユニットクラッチ用作動装置(70)は各作動アーム(85)(86)(87)の他端側を施肥用第1〜第3クラッチワイヤ(94)(95)(96)を介して前記第1〜第3施肥ユニットクラッチ(64)(65)(66)に連動連結させて、カム体(77)による各作動アーム(85)(86)(87)の揺動で各ユニットクラッチ(64)(65)(66)の入切を行うように構成している。
【0017】
また、各カム体(77)(78)の側面には回転検出片(97)(98)を固設させると共に、ポテンショメータ型植付及び施肥ユニットクラッチ位置センサ(99)(100)のアクチュエータ(99a)(100a)に検出片(97)(98)を連結させて、各カム体(77)(78)の回転による各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入切状態を検出するように構成している。
【0018】
そして、各カム体(77)(78)の非作用面である凹面(77b)(78b)に全てのローラ(82)(83)(84)が転接するとき各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を入とさせ、作用面である凸面(77a)(78a)に全てのローラ(82)(83)(84)が転接するとき各ワイヤ(88)〜(96)を引張って各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とさせ、何れか1つ或いは2つのローラ(82)(83)(84)が凸面(77a)(78a)に転接するとき各ローラ(82)(83)(84)に対応する1つ或いは2つのユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とさせ、必要とする条のユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)のみを入とさせた作業を行うように構成している。
【0019】
さらに、各カム体(77)(78)を回転させる植付及び施肥モータ(71)(72)の正逆駆動を行う第1〜第3クラッチスイッチ(101)(102)(103)を設け、第1クラッチスイッチ(101)のオン操作時にはローラ(82)を介して第1作動アーム(85)を揺動させて左側2条分の各ユニットクラッチ(49)(58)(64)を切に、また第2クラッチスイッチ(102)のオン操作時にはローラ(83)を介して第2作動アーム(86)を揺動させて中央2条分の各ユニットクラッチ(50)(59)(65)を切に、さらに第3クラッチスイッチ(103)のオン操作時にはローラ(84)を介して第3作動アーム(87)を揺動させて右側2条分の各ユニットクラッチ(51)(60)(66)を切にして、第1〜第3クラッチスイッチ(101)(102)(103)のオン操作で繰出部材(38a)・苗取出爪(17)・苗縦送りベルト(52)〜(57)の2条分毎の停止を行うように構成している。
【0020】
図2に示す如く、前記クラッチスイッチ(101)(102)(103)は、運転席(13)前方のダッシュボード(104)上に設けると共に、ダッシュボード(104)右側方でアクセルレバー(105)近傍の昇降レバーガイド(106)に前記植付昇降レバー(30)を配備させ、植付作業中はアクセルレバー(105)でエンジン回転数に応じた無段変速(副変速)の連動制御を行って植付変速の一元化(自動車感覚)を図ると共に、植付昇降レバー(30)で植付部(15)の昇降と植付クラッチ(図示せず)の入切と左右線引きマーカの解除を行うように設けている。
【0021】
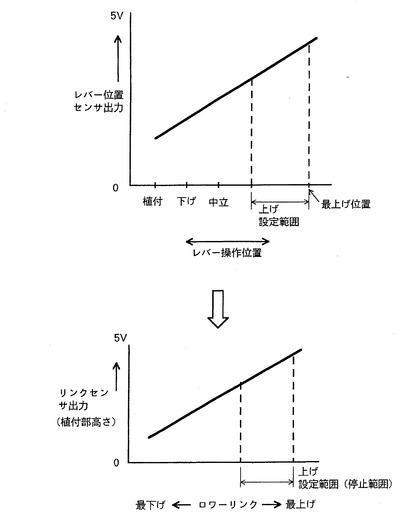
図11、図12に示す如く、前記昇降レバー(30)のレバーガイド(106)には、植付部(15)を上昇させる上げ位置(107a)と、植付部(15)を下降させる下げ位置(107b)と、植付部(15)を任意高さ位置に保持する中立位置(107c)と、植付部(15)の下降位置で植付クラッチをオフからオンとする植付位置(107d)と、左右線引きマーカの収納を解除し圃場にセットする左右マーカ解除位置(107e)(107f)とを有するガイド溝(107)を備えると共に、昇降レバー(30)の操作位置を検出するポテンショメータ型レバー位置センサ(108)をレバーガイド(106)に設けている。
【0022】
また、前記レバーガイド(106)の上げ位置(107a)には、昇降レバー(30)の上げ操作位置を調節する上げ高さ規制板(109)を設けるもので、昇降レバー(30)の上げ方向の動きを規制する係合溝(110)を規制板(109)に形成し、規制板(109)のボルト孔(109a)に結合させる調節ボルト(111)を長孔(112)を介して前後方向にスライド調節自在にレバーガイド(106)に取付けると共に、前記昇降シリンダ(28)で上昇させる植付部(15)の上昇高さをロワーリンク(26)の角度より検出するリンクセンサ(113)を設け、図14に示す如く規制板(109)で上げ設定範囲内で昇降レバー(30)の上げ操作位置を規制するとき、その規制位置に応じた上げ高さで植付部(15)の上げ動作を停止させて、旋回時などにおける植付部(15)の昇降時間の短縮化や、耕盤の深さに応じた上げ高さの任意の設定など可能とさせるように構成している。
【0023】
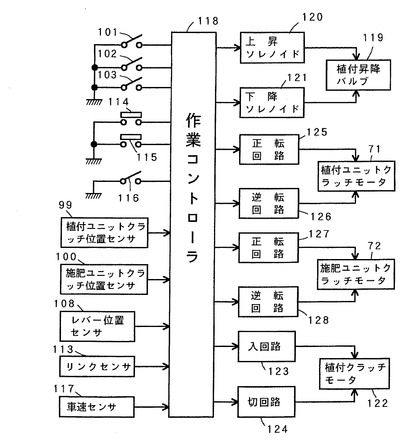
そして図12に示す如く、前記苗載台(16)の左右移動端を検出する苗台検出部材である左右苗台スイッチ(114)(115)と、植付作業中植付クラッチを切として苗載台(16)を左右移動端で停止させる苗台停止スイッチ(116)と、前記ミッションケース(4)からの走行出力を検出する車速センサ(117)と、前記クラッチスイッチ(101)〜(103)と、各位置センサ(99)(100)(108)とを作業コントローラ(118)に接続させると共に、前記昇降シリンダ(28)を駆動する植付昇降バルブ(119)の上昇及び下降ソレノイド(120)(121)と、植付クラッチを入切する植付クラッチモータ(122)の入及び切回路(123)(124)と、前記植付ユニットクラッチモータ(71)の正逆転回路(125)(126)と、前記施肥クラッチモータ(72)の正逆転回路(127)(128)とに作業コントローラ(118)を接続させて、植付部(15)の昇降や植付及び施肥ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入切を行うように構成している。
【0024】
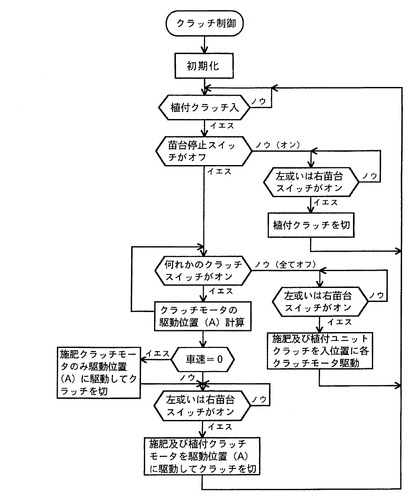
而して図13に示す如く、植付クラッチ入の植付作業中各クラッチスイッチ(101)(102)(103)のうち何れか1つ或いは2つのクラッチスイッチ(101)(102)(103)がオン操作されるとき、これに対応した植付及び施肥ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とするクラッチモータ(71)(72)の駆動位置(A)の計算が行われ、通常の機体走行中にあっては左右苗台スイッチ(114)(115)のオン作動に連動して、クラッチモータ(71)(72)を駆動位置(A)とする同時の駆動が行われるもので、苗載台(16)が左右移動端に位置するときのみにクラッチモータ(71)(72)が同時に切駆動され対応のユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)が切動作され、苗載台(16)の左右移動端以外では切動作されない。
【0025】
また、クラッチモータ(71)(72)の駆動位置(A)への駆動時にあって、車速が0の機体停止時にあっては施肥クラッチモータ(72)のみを駆動位置(A)に駆動し、植付クラッチモータ(71)は上述同様苗載台(16)が左右移動端に達するまでは駆動位置(A)への駆動は行わず待機させるもので、旋回直後などで植付クラッチの入状態で本機を停止させてユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の何れか1つ以上を切操作したときには、施肥は即停止させるが植付爪(17)による苗取出しは苗載台(16)が左右移動端となるまでは行って、停止位置の施肥量が大となって生育むらが発生するなどの不都合を防止する。
【0026】
一方、全てのクラッチスイッチ(101)(102)(103)をオフとする各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入操作時にも、左右苗台スイッチ(114)(115)のオン作動に連動したクラッチモータ(71)(72)の入駆動が行われるもので、苗載台(16)が左右移動端に達するまではユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入動作が行われず、苗載台(16)の左右移動端時のみ入動作が行われて、欠株などの発生のない精度良好な植付けが行われる。
【0027】
また植付開始前或いは植付作業中に、前記苗台停止スイッチ(116)のオン操作で苗台スイッチ(114)(115)が苗載台(16)の左右移動端を検出するときには、植付クラッチを切とさせて、作業開始前の最初の苗継ぎ作業などの容易化を図って、操作性及び作業性を向上させることができる。
【0028】
このように従来枕地などで何れか1つのユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とさせて4条の植付作業を行って、再び全条の植付作業を行う場合にも、苗載台(16)の左右移動途中で苗取りの停止や開始が行われることなく、各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入切が苗載台(16)の両端で常に行われて、欠株の発生が防止される。
【0029】
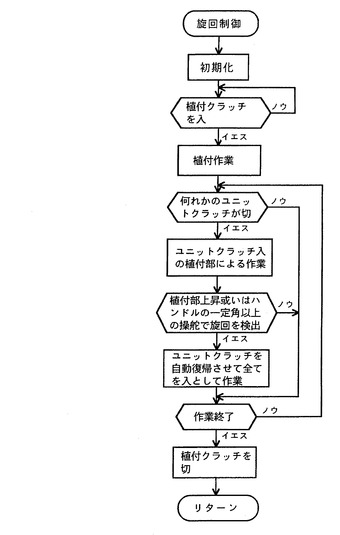
図15に示すものは、ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を自動復帰させる構成例を示すもので、植付クラッチ入の植付作業中にあって、何れか1つのユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切った状態で枕地などの植付作業を行った後に、植付部(15)を一定高さ以上上昇させたとき或いは操向ハンドル(14)を一定操舵角以上操作したときにはこれらの検出に基づいて機体の旋回が終了したと判断して、切状態のユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を自動的に入に復帰させるように設けて、操作性を向上させるものである。
【0030】
以上実施例から明らかなように本発明は、苗植付爪(17)の駆動の入切を行う苗植付爪ユニットクラッチ(49)(50)(51)と、苗載台(16)の苗縦送りの入切を行う苗縦送りユニットクラッチ(58)(59)(60)と、施肥部(36)の肥料の繰出しの入切を行う施肥ユニットクラッチ(64)(65)(66)とを設けると共に、苗植付爪(17)及び苗縦送りユニットクラッチ(58)(59)(60)を作動する植付ユニット駆動部材(71)と、施肥ユニットクラッチ(64)(65)(66)を作動する施肥ユニット駆動部材(72)とを設ける田植機において、苗載台(16)の左右移動端を検出する苗台検出部材(114)(115)を設け、該苗台検出部材(114)(115)の検出に基づいて前記各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を行うように構成している。これにより、ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を苗載台(16)の左右移動端で行い、ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の切から入時には苗載台(16)の左右一端から常に苗取りを行って、欠株の発生を確実に防止して、枕地作業などでの植付精度を向上させることができる。
【0031】
また、苗載台(16)の左右移動端時に植付クラッチを切として苗載台(16)の左右動を停止させる苗台停止スイッチ(116)を設けているから、苗台停止スイッチ(116)のオン時には苗載台(16)を左右移動端で停止させ植付クラッチを切として、作業開始前の苗継ぎ作業などにおける操作性を向上させることができるものである。
【0032】
苗植付爪ユニットクラッチ(49)(50)(51)、苗縦送りユニットクラッチ(58)(59)(60)、施肥ユニットクラッチ(64)(65)(66)の少なくともいずれか1つを切操作したときには、施肥部(36)の肥料の繰出しは即座に切とするが、苗植付爪(17)の駆動は苗台検出部材(114)(115)が苗載台(16)の左右移動端を検出するまでは切としないようにしている。これにより、機体旋回直後などで植付クラッチの入状態で機体を停止させて各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)を切操作したときには、苗載台(16)が左右移動端となるまでは苗取りを行って欠株を防止すると共に、施肥は即時に中断させて、過剰な施肥を防止して生育むらの発生など解消させることができる。
【図面の簡単な説明】
【0033】
【図1】全体の側面図。
【図2】全体の平面図。
【図3】植付部の側面図。
【図4】ユニットクラッチ部の平面説明図。
【図5】植付ユニットクラッチ用作動装置の斜視説明図。
【図6】植付ユニットクラッチ用作動装置の側面説明図。
【図7】植付ユニットクラッチ用作動装置の正面説明図。
【図8】施肥ユニットクラッチ用作動装置の斜視説明図。
【図9】施肥ユニットクラッチ用作動装置の正面説明図。
【図10】植付及び施肥ユニットクラッチ操作系の説明図。
【図11】植付昇降レバー部の平面説明図。
【図12】制御回路図。
【図13】ユニットクラッチの制御フローチャート図。
【図14】植付昇降レバー及びリンクセンサの出力線図。
【図15】フローチャート。
【符号の説明】
【0034】
(15) 植付部
(16) 苗載台
(17) 苗植付爪
(36) 施肥機(施肥部)
(49)(50)(51) 苗植付爪ユニットクラッチ
(58)(59)(60) 苗縦送りユニットクラッチ
(64)(65)(66) 施肥ユニットクラッチ
(71) 植付モータ(ユニット駆動部材)
(72) 施肥モータ(ユニット駆動部材)
(114)(115) 苗台検出スイッチ(苗台検出部材)
(116) 苗台停止スイッチ
【技術分野】
【0001】
本発明は苗載台及び植付爪を備えて連続的に苗植作業を行う田植機にあって、植付条の側方に施肥を同時に行う田植機に関する。
【背景技術】
【0002】
従来から、植付部や施肥部の複数条分毎の駆動の入切を行う複数のユニットクラッチを備えた田植機が知られている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
このような田植機にあっては、枕地などで苗載台の左右移動途中にユニットクラッチを切とさせて苗植付爪による苗取動作などを停止させると、次回ユニットクラッチを入とさせる次回植付作業時には、左右移動する苗載台の苗取位置と苗植付爪位置との間にはずれが発生して、何株かは欠株となる不都合があった。
【課題を解決するための手段】
【0004】
したがって請求項1に記載した発明における田植機は、苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチと、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチと、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチとを設けると共に、苗植付爪及び苗縦送りユニットクラッチを作動する植付ユニット駆動部材と、施肥ユニットクラッチを作動する施肥ユニット駆動部材とを設ける田植機において、苗載台の左右移動端を検出する苗台検出部材を設け、該苗台検出部材の検出に基づいて前記各ユニットクラッチの入切を行うように構成したことを特徴とするものである。
【0005】
また、請求項2に記載した発明は、請求項1に記載した田植機において、苗載台の左右移動端時に植付クラッチを切として苗載台の左右動を停止させる苗台停止スイッチを設けたことを特徴とするものである。
【0006】
また、請求項3に記載した発明は、請求項1に記載の田植機において、前記苗植付爪ユニットクラッチ、前記苗縦送りユニットクラッチ、前記施肥ユニットクラッチの少なくともいずれか1つを切操作したときには、前記施肥部の肥料の繰出しは即座に切とするが、前記苗植付爪の駆動は前記苗台検出部材が前記苗載台の左右移動端を検出するまでは切としないことを特徴とするものである。
【発明の効果】
【0007】
請求項1に記載した発明によれば、各ユニットクラッチの入切を苗載台の左右移動端で行い、ユニットクラッチの切から入時には苗載台の左右一端から常に苗取りを行って、欠株の発生を確実に防止して、枕地作業などでの植付精度を向上させることができる。
【0008】
請求項2に記載した発明によれば、苗載台の左右移動端時に植付クラッチを切として苗載台の駆動を停止させる苗台停止スイッチを設けているから、停止スイッチのオン時には苗載台を左右移動端で停止させ植付クラッチを切として、作業開始前の苗継ぎ作業などでの操作性を向上させることができる。
【0009】
請求項3に記載した発明によれば、機体旋回直後などで植付クラッチの入状態で機体を停止させて各ユニットクラッチを切操作したときには、苗載台が左右移動端となるまでは苗取りを行って欠株を防止すると共に、施肥は即時に中断させて過剰な施肥を防止して生育むらの発生など解消させることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施例を図面に基づいて詳述する。図1は乗用田植機の側面図、図2は同平面図を示し、図中(1)は作業者が搭乗する走行機体である走行車であり、エンジン(2)を車体フレーム(3)前部上方に搭載させ、ミッションケース(4)前方にフロントアクスルケース(5)を介して水田走行用前輪(6)を支持させると共に、前記ミッションケース(4)の後部にリヤアクスルケース(7)を連設し、前記リヤアクスルケース(7)に車輪である水田走行用後輪(8)を支持させる。そして前記エンジン(2)等を覆うボンネット(9)両側に予備苗載台(10)を取付けると共に、足掛台(11)を介して作業者が搭乗する車体カバーであるステップ(12)によって前記ミッションケース(4)等を覆い、前記ステップ(12)上部に運転席(13)を取付け、その運転席(13)の前方で前記ボンネット(9)後部に操向ハンドル(14)を設ける。
【0011】
また、図中(15)は6条植え用の苗載台(16)並びに複数の苗植付爪(17)などを具備する植付部であり、前高後低の合成樹脂製の前傾式苗載台(16)を下部レール(18)及びガイドレール(19)を介して植付ケース(20)に左右往復摺動自在に支持させると共に、一方向に等速回転させるロータリケース(21)を前記植付ケース(20)に支持させ、該ケース(21)の回転軸芯を中心に対称位置に一対の爪ケース(22)(22)を配設し、その爪ケース(22)(22)先端に植付爪(17)(17)を取付ける。また前記植付ケース(20)の前側にローリング支点軸(23)を介して支持フレーム(24)を設け、トップリンク(25)及びロワーリンク(26)を含むリンク機構(27)を介して走行車(1)後側に支持フレーム(24)を連結させ、前記リンク機構(27)を介して植付部(15)を昇降させる昇降シリンダ(28)をロワーリンク(26)に連結させ、前記前後輪(6)(8)を走行駆動して移動すると同時に、左右に往復摺動させる苗載台(16)から一株分の苗を植付爪(17)によって取出し、連続的に苗植え作業を行うように構成する。
【0012】
また、図中(29)は主変速レバー、(30)は植付昇降レバー、(31)は植付け感度設定器、(32)は主クラッチペダル、(33)(33)は左右ブレーキペダル、(34)は2条分均平用センターフロート、(35)は2条分均平用サイドフロート、(36)は6条用の施肥部である施肥機である。
【0013】
さらに、図3、図4に示す如く、肥料を入れる肥料ホッパ(37)と、肥料を定量供給する肥料繰出部である肥料繰出ケース(38)と、フロート(34)(35)の側条作溝器(39)にフレキシブル形搬送ホース(40)を介して肥料を排出させるターボブロワー型送風機(41)と円筒形のエアタンク(42)とを前記施肥機(36)に備え、繰出ケース(38)から繰出される肥料を送風機(41)からの空気流によって作溝器(39)に搬送して施肥を行うように構成している。
【0014】
また、各繰出ケース(38)内の繰出ロールなど繰出部材(38a)の駆動の入切をそれぞれ行う第1〜第6施肥クラッチ(43)(44)(45)(46)(47)(48)と、中央及び左右の植付ケース(20)に内設して中央2条及び左右各2条の苗植付爪(17)を1組として駆動の入切を行う3つの第1〜第3苗植付爪ユニットクラッチ(49)(50)(51)と、前記苗載台(10)の6条用第1〜第6苗縦送りベルト(52)(53)(54)(55)(56)(57)の中央2条及び左右各2条を1組として駆動の入切を行う3つの第1〜第3縦送りユニットクラッチ(58)(59)(60)とを備え、前記施肥クラッチ(43)〜(48)の中央2条及び左右各2条を1組として3本の各クラッチワイヤ(61)(62)(63)で相互に連結させて中央2条及び左右各2条の3つの第1〜第3施肥ユニットクラッチ(64)(65)(66)を構成させ、中央2条及び左右各2条分の繰出部材(38a)・苗取出爪(17)・苗縦送りベルト(52)〜(57)の駆動の入切を単独で操作可能に設けている。
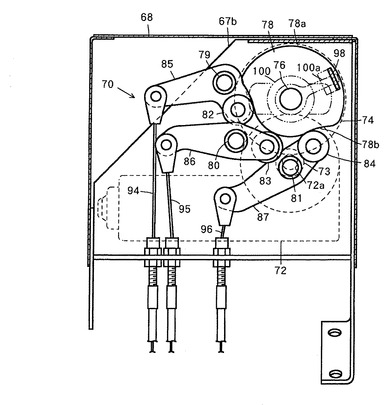
【0015】
また中央及び右植付ケース(20)間の伝動軸ケース(20a)に2つの植付及び施肥ユニットケース(67a)(67b)有するユニットケース体(68)を固設させ、各ユニットケース(67a)(67b)内に中央2条及び左右各2条分毎の繰出部材(38a)・苗取出爪(17)・苗縦送りベルト(52)〜(57)の駆動の入切を行う植付及び施肥ユニットクラッチ用作動装置(69)(70)をそれぞれ設けている。
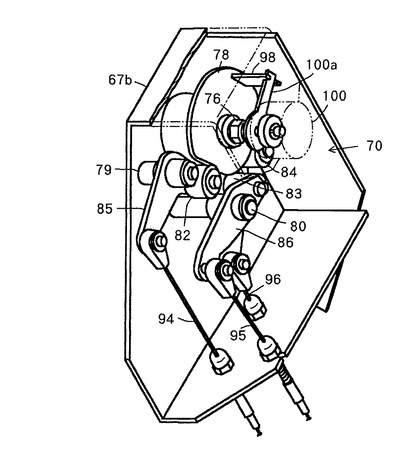
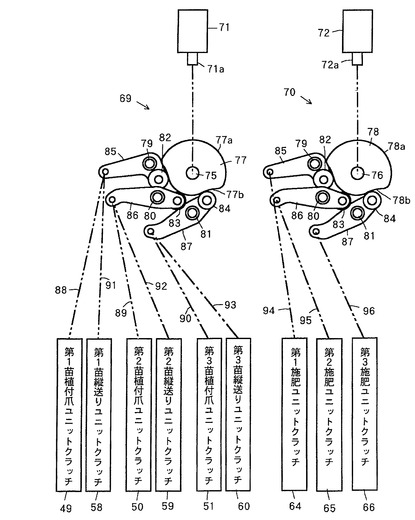
【0016】
前記作動装置(69)(70)は、植付及び施肥ユニット駆動部材である電動式の植付及び施肥モータ(71)(72)と、該モータ(71)(72)のモータ軸(71a)(72a)に1対の減速ギヤ(73)(74)を介し連動連結させる植付及び施肥カム軸(75)(76)と、該カム軸(75)(76)に固設して周面に凹凸のカム面(77a)(77b)・(78a)(78b)を有する植付及び施肥カム体(77)(78)と、ユニットケース(67)(68)に中央部を各支軸(79)(80)(81)を介し揺動自在に支持させて前記カム面(77a)(77b)・(78a)(78b)に転接させるローラ(82)(83)(84)を一端側に有する中央及び左右各2条ユニットクラッチ用の第1〜第3作動アーム(85)(86)(87)とをそれぞれ備え、植付ユニットクラッチ用作動装置(69)の各作動アーム(85)(86)(87)の他端側を各苗植付爪用第1〜第3クラッチワイヤ(88)(89)(90)及び苗縦送り用第1〜第3クラッチワイヤ(91)(92)(93)を介して前記第1〜第3苗植付爪ユニットクラッチ(49)(50)(51)及び苗縦送りユニットクラッチ(58)(59)(60)に連動連結させて、カム体(77)による第1作動アーム(85)の揺動で第1苗植付爪及び苗縦送りユニットクラッチ(49)(58)を、第2揺動アーム(86)の揺動で第2苗植付爪及び苗縦送りユニットクラッチ(50)(59)を、第3揺動アーム(87)の揺動で第3苗植付爪及び苗縦送りユニットクラッチ(51)(60)の入切を行うように構成すると共に、施肥ユニットクラッチ用作動装置(70)は各作動アーム(85)(86)(87)の他端側を施肥用第1〜第3クラッチワイヤ(94)(95)(96)を介して前記第1〜第3施肥ユニットクラッチ(64)(65)(66)に連動連結させて、カム体(77)による各作動アーム(85)(86)(87)の揺動で各ユニットクラッチ(64)(65)(66)の入切を行うように構成している。
【0017】
また、各カム体(77)(78)の側面には回転検出片(97)(98)を固設させると共に、ポテンショメータ型植付及び施肥ユニットクラッチ位置センサ(99)(100)のアクチュエータ(99a)(100a)に検出片(97)(98)を連結させて、各カム体(77)(78)の回転による各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入切状態を検出するように構成している。
【0018】
そして、各カム体(77)(78)の非作用面である凹面(77b)(78b)に全てのローラ(82)(83)(84)が転接するとき各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を入とさせ、作用面である凸面(77a)(78a)に全てのローラ(82)(83)(84)が転接するとき各ワイヤ(88)〜(96)を引張って各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とさせ、何れか1つ或いは2つのローラ(82)(83)(84)が凸面(77a)(78a)に転接するとき各ローラ(82)(83)(84)に対応する1つ或いは2つのユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とさせ、必要とする条のユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)のみを入とさせた作業を行うように構成している。
【0019】
さらに、各カム体(77)(78)を回転させる植付及び施肥モータ(71)(72)の正逆駆動を行う第1〜第3クラッチスイッチ(101)(102)(103)を設け、第1クラッチスイッチ(101)のオン操作時にはローラ(82)を介して第1作動アーム(85)を揺動させて左側2条分の各ユニットクラッチ(49)(58)(64)を切に、また第2クラッチスイッチ(102)のオン操作時にはローラ(83)を介して第2作動アーム(86)を揺動させて中央2条分の各ユニットクラッチ(50)(59)(65)を切に、さらに第3クラッチスイッチ(103)のオン操作時にはローラ(84)を介して第3作動アーム(87)を揺動させて右側2条分の各ユニットクラッチ(51)(60)(66)を切にして、第1〜第3クラッチスイッチ(101)(102)(103)のオン操作で繰出部材(38a)・苗取出爪(17)・苗縦送りベルト(52)〜(57)の2条分毎の停止を行うように構成している。
【0020】
図2に示す如く、前記クラッチスイッチ(101)(102)(103)は、運転席(13)前方のダッシュボード(104)上に設けると共に、ダッシュボード(104)右側方でアクセルレバー(105)近傍の昇降レバーガイド(106)に前記植付昇降レバー(30)を配備させ、植付作業中はアクセルレバー(105)でエンジン回転数に応じた無段変速(副変速)の連動制御を行って植付変速の一元化(自動車感覚)を図ると共に、植付昇降レバー(30)で植付部(15)の昇降と植付クラッチ(図示せず)の入切と左右線引きマーカの解除を行うように設けている。
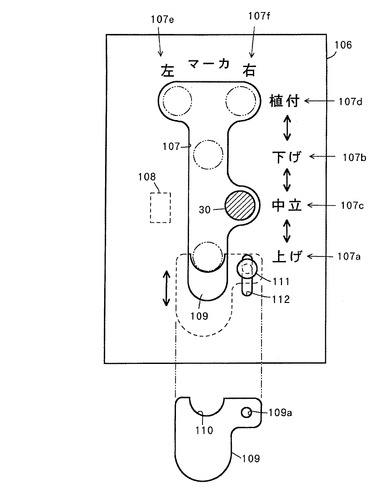
【0021】
図11、図12に示す如く、前記昇降レバー(30)のレバーガイド(106)には、植付部(15)を上昇させる上げ位置(107a)と、植付部(15)を下降させる下げ位置(107b)と、植付部(15)を任意高さ位置に保持する中立位置(107c)と、植付部(15)の下降位置で植付クラッチをオフからオンとする植付位置(107d)と、左右線引きマーカの収納を解除し圃場にセットする左右マーカ解除位置(107e)(107f)とを有するガイド溝(107)を備えると共に、昇降レバー(30)の操作位置を検出するポテンショメータ型レバー位置センサ(108)をレバーガイド(106)に設けている。
【0022】
また、前記レバーガイド(106)の上げ位置(107a)には、昇降レバー(30)の上げ操作位置を調節する上げ高さ規制板(109)を設けるもので、昇降レバー(30)の上げ方向の動きを規制する係合溝(110)を規制板(109)に形成し、規制板(109)のボルト孔(109a)に結合させる調節ボルト(111)を長孔(112)を介して前後方向にスライド調節自在にレバーガイド(106)に取付けると共に、前記昇降シリンダ(28)で上昇させる植付部(15)の上昇高さをロワーリンク(26)の角度より検出するリンクセンサ(113)を設け、図14に示す如く規制板(109)で上げ設定範囲内で昇降レバー(30)の上げ操作位置を規制するとき、その規制位置に応じた上げ高さで植付部(15)の上げ動作を停止させて、旋回時などにおける植付部(15)の昇降時間の短縮化や、耕盤の深さに応じた上げ高さの任意の設定など可能とさせるように構成している。
【0023】
そして図12に示す如く、前記苗載台(16)の左右移動端を検出する苗台検出部材である左右苗台スイッチ(114)(115)と、植付作業中植付クラッチを切として苗載台(16)を左右移動端で停止させる苗台停止スイッチ(116)と、前記ミッションケース(4)からの走行出力を検出する車速センサ(117)と、前記クラッチスイッチ(101)〜(103)と、各位置センサ(99)(100)(108)とを作業コントローラ(118)に接続させると共に、前記昇降シリンダ(28)を駆動する植付昇降バルブ(119)の上昇及び下降ソレノイド(120)(121)と、植付クラッチを入切する植付クラッチモータ(122)の入及び切回路(123)(124)と、前記植付ユニットクラッチモータ(71)の正逆転回路(125)(126)と、前記施肥クラッチモータ(72)の正逆転回路(127)(128)とに作業コントローラ(118)を接続させて、植付部(15)の昇降や植付及び施肥ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入切を行うように構成している。
【0024】
而して図13に示す如く、植付クラッチ入の植付作業中各クラッチスイッチ(101)(102)(103)のうち何れか1つ或いは2つのクラッチスイッチ(101)(102)(103)がオン操作されるとき、これに対応した植付及び施肥ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とするクラッチモータ(71)(72)の駆動位置(A)の計算が行われ、通常の機体走行中にあっては左右苗台スイッチ(114)(115)のオン作動に連動して、クラッチモータ(71)(72)を駆動位置(A)とする同時の駆動が行われるもので、苗載台(16)が左右移動端に位置するときのみにクラッチモータ(71)(72)が同時に切駆動され対応のユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)が切動作され、苗載台(16)の左右移動端以外では切動作されない。
【0025】
また、クラッチモータ(71)(72)の駆動位置(A)への駆動時にあって、車速が0の機体停止時にあっては施肥クラッチモータ(72)のみを駆動位置(A)に駆動し、植付クラッチモータ(71)は上述同様苗載台(16)が左右移動端に達するまでは駆動位置(A)への駆動は行わず待機させるもので、旋回直後などで植付クラッチの入状態で本機を停止させてユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の何れか1つ以上を切操作したときには、施肥は即停止させるが植付爪(17)による苗取出しは苗載台(16)が左右移動端となるまでは行って、停止位置の施肥量が大となって生育むらが発生するなどの不都合を防止する。
【0026】
一方、全てのクラッチスイッチ(101)(102)(103)をオフとする各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入操作時にも、左右苗台スイッチ(114)(115)のオン作動に連動したクラッチモータ(71)(72)の入駆動が行われるもので、苗載台(16)が左右移動端に達するまではユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入動作が行われず、苗載台(16)の左右移動端時のみ入動作が行われて、欠株などの発生のない精度良好な植付けが行われる。
【0027】
また植付開始前或いは植付作業中に、前記苗台停止スイッチ(116)のオン操作で苗台スイッチ(114)(115)が苗載台(16)の左右移動端を検出するときには、植付クラッチを切とさせて、作業開始前の最初の苗継ぎ作業などの容易化を図って、操作性及び作業性を向上させることができる。
【0028】
このように従来枕地などで何れか1つのユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切とさせて4条の植付作業を行って、再び全条の植付作業を行う場合にも、苗載台(16)の左右移動途中で苗取りの停止や開始が行われることなく、各ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)の入切が苗載台(16)の両端で常に行われて、欠株の発生が防止される。
【0029】
図15に示すものは、ユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を自動復帰させる構成例を示すもので、植付クラッチ入の植付作業中にあって、何れか1つのユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を切った状態で枕地などの植付作業を行った後に、植付部(15)を一定高さ以上上昇させたとき或いは操向ハンドル(14)を一定操舵角以上操作したときにはこれらの検出に基づいて機体の旋回が終了したと判断して、切状態のユニットクラッチ(49)〜(51)・(58)〜(60)・(64)〜(66)を自動的に入に復帰させるように設けて、操作性を向上させるものである。
【0030】
以上実施例から明らかなように本発明は、苗植付爪(17)の駆動の入切を行う苗植付爪ユニットクラッチ(49)(50)(51)と、苗載台(16)の苗縦送りの入切を行う苗縦送りユニットクラッチ(58)(59)(60)と、施肥部(36)の肥料の繰出しの入切を行う施肥ユニットクラッチ(64)(65)(66)とを設けると共に、苗植付爪(17)及び苗縦送りユニットクラッチ(58)(59)(60)を作動する植付ユニット駆動部材(71)と、施肥ユニットクラッチ(64)(65)(66)を作動する施肥ユニット駆動部材(72)とを設ける田植機において、苗載台(16)の左右移動端を検出する苗台検出部材(114)(115)を設け、該苗台検出部材(114)(115)の検出に基づいて前記各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を行うように構成している。これにより、ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の入切を苗載台(16)の左右移動端で行い、ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)の切から入時には苗載台(16)の左右一端から常に苗取りを行って、欠株の発生を確実に防止して、枕地作業などでの植付精度を向上させることができる。
【0031】
また、苗載台(16)の左右移動端時に植付クラッチを切として苗載台(16)の左右動を停止させる苗台停止スイッチ(116)を設けているから、苗台停止スイッチ(116)のオン時には苗載台(16)を左右移動端で停止させ植付クラッチを切として、作業開始前の苗継ぎ作業などにおける操作性を向上させることができるものである。
【0032】
苗植付爪ユニットクラッチ(49)(50)(51)、苗縦送りユニットクラッチ(58)(59)(60)、施肥ユニットクラッチ(64)(65)(66)の少なくともいずれか1つを切操作したときには、施肥部(36)の肥料の繰出しは即座に切とするが、苗植付爪(17)の駆動は苗台検出部材(114)(115)が苗載台(16)の左右移動端を検出するまでは切としないようにしている。これにより、機体旋回直後などで植付クラッチの入状態で機体を停止させて各ユニットクラッチ(49)(50)(51)・(58)(59)(60)・(64)(65)(66)を切操作したときには、苗載台(16)が左右移動端となるまでは苗取りを行って欠株を防止すると共に、施肥は即時に中断させて、過剰な施肥を防止して生育むらの発生など解消させることができる。
【図面の簡単な説明】
【0033】
【図1】全体の側面図。
【図2】全体の平面図。
【図3】植付部の側面図。
【図4】ユニットクラッチ部の平面説明図。
【図5】植付ユニットクラッチ用作動装置の斜視説明図。
【図6】植付ユニットクラッチ用作動装置の側面説明図。
【図7】植付ユニットクラッチ用作動装置の正面説明図。
【図8】施肥ユニットクラッチ用作動装置の斜視説明図。
【図9】施肥ユニットクラッチ用作動装置の正面説明図。
【図10】植付及び施肥ユニットクラッチ操作系の説明図。
【図11】植付昇降レバー部の平面説明図。
【図12】制御回路図。
【図13】ユニットクラッチの制御フローチャート図。
【図14】植付昇降レバー及びリンクセンサの出力線図。
【図15】フローチャート。
【符号の説明】
【0034】
(15) 植付部
(16) 苗載台
(17) 苗植付爪
(36) 施肥機(施肥部)
(49)(50)(51) 苗植付爪ユニットクラッチ
(58)(59)(60) 苗縦送りユニットクラッチ
(64)(65)(66) 施肥ユニットクラッチ
(71) 植付モータ(ユニット駆動部材)
(72) 施肥モータ(ユニット駆動部材)
(114)(115) 苗台検出スイッチ(苗台検出部材)
(116) 苗台停止スイッチ
【特許請求の範囲】
【請求項1】
苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチと、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチと、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチとを設けると共に、苗植付爪及び苗縦送りユニットクラッチを作動する植付ユニット駆動部材と、施肥ユニットクラッチを作動する施肥ユニット駆動部材とを設ける田植機において、
苗載台の左右移動端を検出する苗台検出部材を設け、該苗台検出部材の検出に基づいて前記各ユニットクラッチの入切を行うように構成したことを特徴とする田植機。
【請求項2】
苗載台の左右移動端時に植付クラッチを切として苗載台の左右動を停止させる苗台停止スイッチを設けたことを特徴とする請求項1に記載の田植機。
【請求項3】
前記苗植付爪ユニットクラッチ、前記苗縦送りユニットクラッチ、前記施肥ユニットクラッチの少なくともいずれか1つを切操作したときには、前記施肥部の肥料の繰出しは即座に切とするが、前記苗植付爪の駆動は前記苗台検出部材が前記苗載台の左右移動端を検出するまでは切としないことを特徴とする請求項1に記載の田植機。
【請求項1】
苗植付爪の駆動の入切を行う苗植付爪ユニットクラッチと、苗載台の苗縦送りの入切を行う苗縦送りユニットクラッチと、施肥部の肥料の繰出しの入切を行う施肥ユニットクラッチとを設けると共に、苗植付爪及び苗縦送りユニットクラッチを作動する植付ユニット駆動部材と、施肥ユニットクラッチを作動する施肥ユニット駆動部材とを設ける田植機において、
苗載台の左右移動端を検出する苗台検出部材を設け、該苗台検出部材の検出に基づいて前記各ユニットクラッチの入切を行うように構成したことを特徴とする田植機。
【請求項2】
苗載台の左右移動端時に植付クラッチを切として苗載台の左右動を停止させる苗台停止スイッチを設けたことを特徴とする請求項1に記載の田植機。
【請求項3】
前記苗植付爪ユニットクラッチ、前記苗縦送りユニットクラッチ、前記施肥ユニットクラッチの少なくともいずれか1つを切操作したときには、前記施肥部の肥料の繰出しは即座に切とするが、前記苗植付爪の駆動は前記苗台検出部材が前記苗載台の左右移動端を検出するまでは切としないことを特徴とする請求項1に記載の田植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−28052(P2009−28052A)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2008−259333(P2008−259333)
【出願日】平成20年10月6日(2008.10.6)
【分割の表示】特願2000−203264(P2000−203264)の分割
【原出願日】平成12年7月5日(2000.7.5)
【出願人】(000006851)ヤンマー農機株式会社 (132)
【Fターム(参考)】
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成20年10月6日(2008.10.6)
【分割の表示】特願2000−203264(P2000−203264)の分割
【原出願日】平成12年7月5日(2000.7.5)
【出願人】(000006851)ヤンマー農機株式会社 (132)
【Fターム(参考)】
[ Back to top ]