
目視照準器および目視照準器を備えた防犯センサ
【課題】防犯センサにおける、検知波の送信器および受信器のそれぞれの送信方向および受信方向を調整するための目視照準器であって、この送信および受信の方向の調整を行う作業者が適切な方向から目視照準器を覗くことを容易に可能にする、目視照準器を提供する。
【解決手段】マイクロレンズ22が設けられた接眼レンズ21と、接眼レンズ21の視野に含まれる第1のマーカ26が設けられた対物レンズ26と、接眼レンズ22および対物レンズ26の間の光路に配置された反射ミラー27とを備え、第1のマーカ26は、円または三角形以上の多角形の輪郭線26aからなり、視軸が許容範囲から外れるとマイクロレンズ22の視野から外れて一部分が欠落して視認されるように設定されている。
【解決手段】マイクロレンズ22が設けられた接眼レンズ21と、接眼レンズ21の視野に含まれる第1のマーカ26が設けられた対物レンズ26と、接眼レンズ22および対物レンズ26の間の光路に配置された反射ミラー27とを備え、第1のマーカ26は、円または三角形以上の多角形の輪郭線26aからなり、視軸が許容範囲から外れるとマイクロレンズ22の視野から外れて一部分が欠落して視認されるように設定されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、送信器から受信器へ送信された検知線の遮断により侵入者などを検知する防犯センサに設けられる目視照準器、およびこの目視照準器を備えた防犯センサに関する。
【背景技術】
【0002】
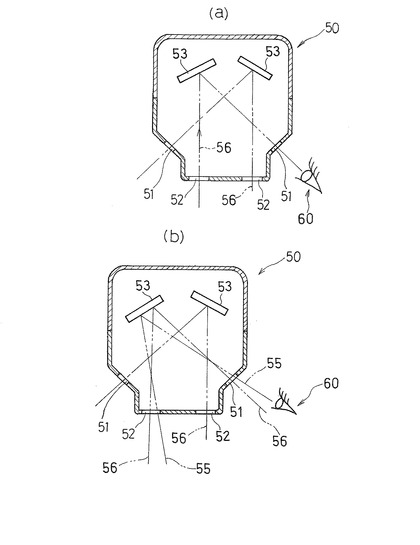
この種の能動型防犯用センサ装置は、直線的な警戒区域の両端部に、赤外線の投光部の投光器と赤外線受光部の受光器とが、これらの光軸を一致させた配置で設置されており、直線的な近距離から数百mの長距離までの警戒区域を設定できるので、長距離になる程、投光器と受光器間での光軸を正確に一致させるのが難しい。そこで、従来の防犯用センサ装置には、図13(a)および(b)に示すような照準器が投光器および受光器にそれぞれ設けられており、センサ装置の設置またはメンテナンスに際しては前記照準器によって光軸を合わせるようになっている。
【0003】
この照準器50は、一対の接眼窓51と、一対の対物窓52と、両窓51,52間で照準軸56上に配置された一対の照準ミラー53とを備えている。なお、投光器の照準器における照準像は受光器であって、受光器の照準器における照準像は投光器であるため、投光器と受光器の光軸が一致すれば、照準軸はこの光軸と一致して、投光器と受光器が正確に対向して配置されることになる。そして、図13(a)に示すように、この照準器50を用いた光軸調整では、左右の何れか一方の接眼窓51を作業者が一方の目60で覗きながら、ダイヤルや調整ねじを操作して投光器または受光器の向きを上下左右に動かして、照準ミラー53に映る受光器または投光器の像が対物窓52の中央にくるように調整する。しかし、図13(b)に示すように、調整を行う作業者が接眼窓51を正面からではなく斜め方向から覗いた場合、視軸55が、照準軸56(すなわち、対向する投光器または受光器から延びる軸)に対してずれてしまう。このように視軸55と照準軸56とがずれた状態で光軸調整が行われると、正確に光軸が調整されない。したがって、光軸調整を行う作業者は、その視軸55をできる限り照準軸56に一致させる必要がある。これに対して、接眼窓51を覗く作業者の目を適切に位置付けて視軸と照準軸を一致させるために、照準器50の外側に向けて接眼窓51から延びた覗き筒を設けたものが存在する。しかし、広い視野をとるために接眼窓51を大きくすると、覗き筒の照準器からの突出長さが大きくなり、この照準器を備えた防犯センサの取扱いが困難になるとともに、見栄えも悪い。
【0004】
一方、特許文献1には、防犯センサではなく、カメラのファインダ装置において、ファインダ画面の中心を示すターゲットマークが対物レンズに形成され、接眼レンズにマイクロレンズが組み込まれたものが記載されている。このファインダ装置によれば、ファインダ画面の中心を示すターゲットマークがマイクロレンズを通して被写体像とともに鮮明に観察される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平08−248479号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、カメラのファインダ装置におけるターゲットマークは、被写体像をファインダ画面の中心に合致させるものである。そのため、マイクロレンズを覗く者の視軸を調整してマイクロレンズの正面に眼球を位置付ける必要性は、このようなファインダ装置には全く存在しない。
【0007】
そこで、本発明は、防犯センサに設けられる目視照準器に、マイクロレンズおよびターゲットマークを適用し、当該ターゲットマークを、照準軸と視軸を合致させるための軸一致マーカとして用いることで、照準作業を行う作業者が適切な方向から目視照準器を覗くことを容易に可能にする、目視照準器、およびこの目視照準器を備えた防犯センサを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明にかかる、防犯センサにおける、検知波の送信器および受信器のそれぞれの送信方向および受信方向を調整するための目視照準器は、マイクロレンズが設けられた接眼レンズと、前記接眼レンズの視野に含まれる第1のマーカが設けられた対物レンズと、前記接眼レンズおよび前記対物レンズの間の光路に配置された反射ミラーとを備え、前記第1のマーカは、円または三角形以上の多角形の輪郭線からなり、視軸が許容範囲から外れると前記マイクロレンズの視野から外れて一部分が欠落して視認されるように設定されている。
【0009】
ここで、「マイクロレンズ」は、凸レンズであって、対象物を拡大して目視観察させることを可能にするレンズである。
「輪郭線」は、ある形状の輪郭を示す線であるが、実線である必要はない。すなわち、輪郭線は複数の途切れた箇所を有してもよく、輪郭線には、輪郭が形作る形状が認識できる程度の間欠的な複数の輪郭線部から構成されるものも含まれる。
「視軸」は、当該目視照準器を用いて送信器の送信方向および受信器の受信方向の調整、つまり照準作業を行う、作業者の片方の目の視軸を指す。
「視軸が許容範囲から外れる」とは、送信器の送信方向および受信器の受信方向を調整する作業者の視軸の位置が適切でないために、そのような視軸による調整では、送信器からの検知波を受信器で受信できないことを言う。すなわち、たとえ視軸が照準軸と一致していなくとも、そのような視軸による調整の結果、送信器からの検知波を受信器で受信できるのであれば、視軸は「許容範囲」に含まれることになる。なお、「投光器からの検知波を受光器で受信できる」とは、当該防犯センサに受信レベルを監視する手段が設けられている場合には、この監視手段によって受信を確認できることを指すのに対して、そのような監視手段が設けられていない場合には、防犯センサごとに設定されている感度余裕の範囲内であることを指す。
【0010】
この構成によれば、視軸が許容範囲から外れると、対物レンズに設けられた第1のマーカがマイクロレンズの視野から外れて一部分が欠落して視認されるように設定されているので、当該目視照準器を用いて照準作業を行う作業者がこの第1のマーカの全体を視認できるように目の位置つまりマイクロレンズを覗く方向を調節すれば、容易に視軸を許容範囲内に入れることができる。このように、対物レンズに設けられた第1のマーカが軸一致マーカとして機能するため、照準作業を行う作業者は適切な方向から目視照準器を覗くことが容易になる。
【0011】
本発明の好ましい実施形態では、前記第1のマーカの前記輪郭線の外接円の中心は前記マイクロレンズの光軸上に位置し、前記マイクロレンズの光軸上の一点であって、前記マイクロレンズによって拡大された前記マーカの虚像の明視距離に位置する明視位置と、前記外接円の円周とを結ぶ第1の円錐側面が、前記明視位置から前記マイクロレンズによって得られる前記対物レンズ上の視野の円周状の外縁と、前記明視位置とを結ぶ第2の円錐側面よりも内側に位置し、Δθ≦θ0/2を満足する。ただし、Δθは、前記第2の円錐側面の母線と前記光軸のなす角度と、前記第1の円錐側面の母線と前記光軸のなす角度との差であり、θ0は、前記送信器からの検知波の広がり角度である。
【0012】
ここで、第1のマーカの輪郭線が円周の場合、つまり連続または不連続な円の輪郭線の場合、「第1のマーカの輪郭線の外接円」は、その円自体を指す。
「明視距離」は正常な目の近点距離であって、対象物から約250mmである。「マイクロレンズによって拡大されたマーカの虚像の明視距離」も、この虚像から約250mmである。
【0013】
この実施形態によれば、対物レンズに設けられた第1のマーカの外接円から延びた第1の円錐側面がマイクロレンズによって得られる対物レンズ上の視野の外縁から延びた第2の円錐側面よりも内側に位置するので、明視位置またはその近傍に目を位置付けた作業者がマイクロレンズを覗くと、第1のマーカはマイクロレンズによる視野内に収まる。一方、第2の円錐側面の母線と光軸のなす角度と、第1の円錐側面の母線と光軸のなす角度との差Δθが検知波の広がり角度θ0の1/2以下であるため、明視位置またはその近傍に目を位置付けた作業者がマイクロレンズを覗いて視認する第1のマーカは、マイクロレンズによる視野内の領域のある程度の割合を占有する。このため、視軸が照準軸からある程度はずれて初めて、第1のマーカはマイクロレンズによる対物レンズ上の視野範囲内からはみ出して一部が欠落することになる。これは、第1のマーカが、視野内に収まりかつ視野にほぼ等しい大きさであれば、作業者の目が明視位置から離れて視軸がずれると、すぐに第1のマーカが視野から外れて一部分が欠落して視認されるが、たとえ、第1のマーカが視野よりも小さいために作業者の目が明視位置から離れて視軸がある程度ずれるまで第1のマーカの一部分の欠落が視認されないとしても、検知波の広がりの範囲を超えれば、視軸のずれが認識されることを意味する。
【0014】
このように大きさが制限された第1のマーカは、視軸が許容範囲から外れるとマイクロレンズの視野から外れて一部分が欠落するような大きさであるため、視軸と照準軸を一致させるための軸一致マーカとして機能することができる。
【0015】
好ましくは、前記対物レンズには、前記第1のマーカの中心を示す第2のマーカが設けられている。この第2のマーカによって、照準作業に有用な中心が示される。
【0016】
さらに好ましくは、前記第2のマーカは直線からなり、当該直線は、前記輪郭線からその中心に向って延び、かつ前記輪郭線の中心には達しない長さの3つ以上の線部からなる。この中心に向って延びる線部によって、照準作業に有用な中心が示される一方、これら線部の長さは輪郭線の中心には達しないため、輪郭線の中心部分の対物レンズは透明のままであり、これら線部は、作業者が照準を見る際の妨げとはならない。
【0017】
本発明のさらに好ましい実施形態では、前記検知波は光であり、前記送信器および前記受信器は、それぞれ投光器および受光器であり、前記送信器および前記受信器のそれぞれの送信方向および受信方向の調整は、前記投光器と前記受光器の光軸合わせである。このように検知波が光の場合、赤外線ビームが特に好ましい。前記検知波は、光の他にも、電波であってもよく、マイクロ波が特に好ましい。前記検知波は、また、レーザであってもよい。前記検知波は、さらに、超音波であってもよい。
【0018】
本発明にかかる、送信器および受信器を備えた防犯センサは、前記目視照準器を備える。
【発明の効果】
【0019】
本発明の目視照準器によれば、目視照準器を用いて照準作業を行う作業者の片方の目の視軸が許容範囲内に入った状態でこの作業者が照準作業を行うことで、送信器の送信方向と受信器の受信方向のずれを許容範囲内にすることができる。そのため、このように照準作業が行われると、防犯センサの作動時に、送信器からの検知波を受信器で必ず受信することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の照準器が適用される防犯センサ装置を示すブロック図である。
【図2】本発明の一実施形態に係る照準器が組み込まれた受光部を示す斜視図である。
【図3】本発明の一実施形態に係る照準器を示す斜視図である。
【図4】図3の照準器を示す概略横断面図である。
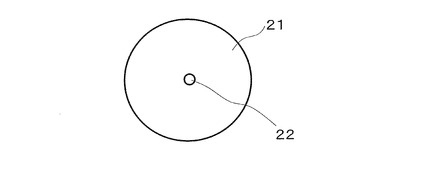
【図5】図3の照準器に設けられた接眼レンズを照準器の内側から見た正面図である。
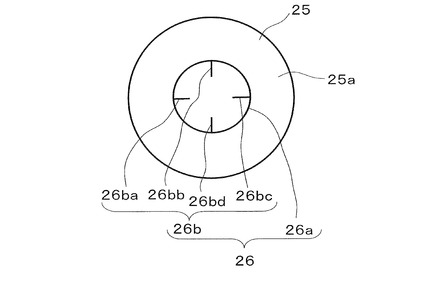
【図6】図3の照準器に設けられた対物レンズを照準器の内側から見た正面図であって、対物レンズに設けられたマーカ集合の一例を示す図である。
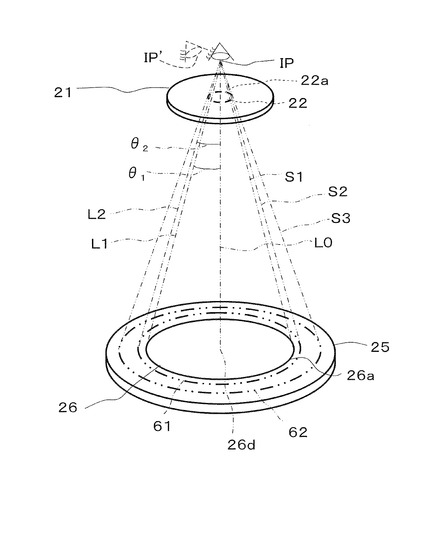
【図7】図3の照準器の構成を簡略化して示した斜視図である。
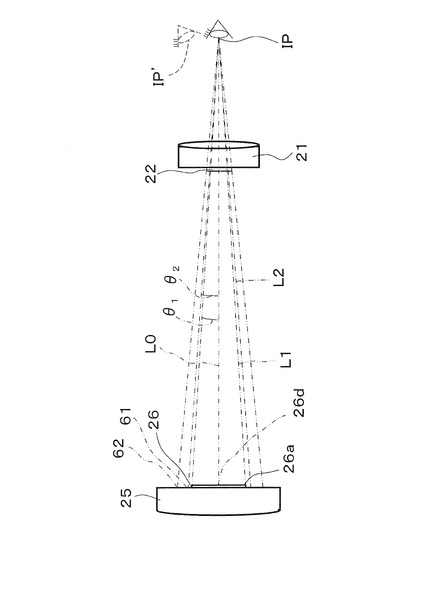
【図8】図7の照準器の構成に対応した模式図である。
【図9】図3の照準器の対物レンズに設けられた軸一致マーカであって、軸一致マーカの大きさが視野の外縁にほぼ等しい場合における、軸一致マーカの視認された様子を示す図である。
【図10】(a)および(b)は、図3の照準器の対物レンズに設けられた軸一致マーカであって、軸一致マーカの大きさが視野の外縁よりもかなり小さい場合における、軸一致マーカの視認された様子を示す図であり、(a)は軸一致マーカの全体が視認されている様子、(b)は軸一致マーカの一部が欠けて視認されている様子を示す図である。
【図11】図3の照準器に設けられた対物レンズを照準器の内側から見た正面図であって、図6のマーカ集合の第1変形例を示す図である。
【図12】図3の照準器に設けられた対物レンズを照準器の内側から見た正面図であって、図6のマーカ集合の第2変形例を示す図である。
【図13】(a)および(b)は、従来の照準器を用いた光軸調整を示す照準器の概略横断面図である。
【発明を実施するための形態】
【0021】
以下、本発明の各実施形態を図面に基づいて説明する。
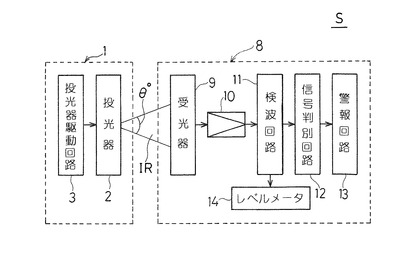
図1は本発明の一実施形態に係る照準器が適用される防犯用センサ装置を示すブロック構成図である。この防犯用センサ装置Sは、例えば200m以上の直線的な警戒区域の両端部の壁面またはポールに光軸を一致させて相対向する配置で設置される投光部1と受光部8とからなり、投光部1および受光部8は共にユニット化された構成になっている。
【0022】
投光部1は投光器2および投光器駆動回路3を有しており、この投光器2および投光器駆動回路3は、後述するように、一対設けられているが、図1では1つのみを示している。投光器2は、赤外線発光ダイオードのような投光素子と、この投光素子から発生した赤外線を反射して一定方向に向かう近赤外線のような赤外線ビームIRとして出射する出射ミラーとを備えている。投光器駆動回路3は投光器2の投光素子を所定の周波数で発光駆動してパルス変調波からなる赤外線ビームIRを出射させる。この赤外線ビームIRの広がり角度、つまり検知波の広がり角度をθ0とする。
【0023】
一方、受光部8では、集光ミラーとフォトトランジスタなどの受光素子とを備えた受光器9が、投光部1からの赤外線ビームIRを受光して、その赤外線受光量に応じた信号レベルの電気信号を出力し、この電気信号が増幅回路10で増幅されたのちに、検波回路11で外乱光を除去されてパルス変調波のみによる受光信号のレベルに応じた信号に変換され、この信号レベルが予め設定された侵入検知レベル以下であるか否かを信号判別回路12で判別される。信号判別回路12は、投光部1からの赤外線ビームIRが不法浸入者により遮られて受光信号レベルが予め設定された侵入検知レベル以下であると判別したときに、検知信号を出力する。警報回路13は、信号判別回路12から検知信号が入力することによって駆動され、不法浸入者が存在することを報知するための警報信号を、例えば図示しない警備センターへ出力するようになっている。
【0024】
受光部8の検波回路11には電圧計のようなレベルメータ14が接続されており、このレベルメータ14には、受光器9の赤外線受光量に比例した信号レベルが表示される。検波回路11には、レベルメータ14とは別に、受光信号のレベルが所定レベルを越えたときに点灯するレベル表示器が接続されることもある。前記受光器9、増幅回路10、検波回路11、信号判別回路12およびレベルメータ14も、後述するように、一対設けられているが、図1では1つのみを示している。
【0025】
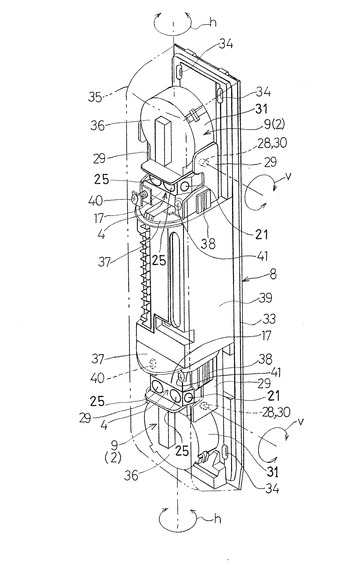
図2は、受光部8を示す斜視図であり、この例では、受光部8は、上下2つの受光器9を有する。投光部1も同様の構成になっているので、同図には投光部1における相当部品に対応する符号をも併せて付してある。受光部8は、壁やポールなどの取付面に取り付けられる取付用ベース33と、この取付用ベース33にこれの複数の取付孔34を介して着脱自在に取り付けられてセンサ回路全体を覆うカバー35とにより、外体ケースが構成されている。受光器9は、集光ミラー31の焦点位置に受光素子(図示せず)が配置され、その集光ミラー31の開口部がミラーカバー36で覆われている。
【0026】
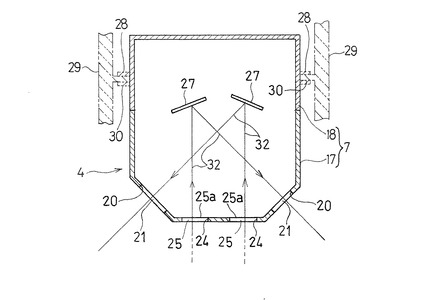
受光器9と投光器2の光軸の粗調整に用いられる、本発明にかかる照準器4は、図3に示すように、本体ケース7を備え、この本体ケース7は、第1ケース17と第2ケース18とを合体して構成されている。第1ケース17は、前側面に左右一対の接眼窓(のぞき窓)20と左右一対の対物窓24とを有する。
【0027】
第2ケース18は、第1ケース17の後部に例えばねじ止め手段(図示せず)で連結されており、図4に示すように、両側面から突設された一対の軸受筒部28を有する。本体ケース7内には、照準ミラー27が対物窓24との間で照準軸32上に配置され、これにより、照準器4が構成されている。
【0028】
接眼窓20には透明なガラスや樹脂からなり、凹レンズから構成された接眼レンズ21が嵌め込まれている。図5に示すように、接眼レンズ21の対物側の面には、その中心部に、正面から見て円形状のマイクロレンズ22が設けられている。具体的には、接眼レンズ21およびマイクロレンズ22は、接眼レンズ21の光軸およびマイクロレンズ22の光軸が一致するように一体成形されている。マイクロレンズ22は、凸レンズからなり、物体を拡大して映すことができる。マイクロレンズ22は、後述するマーカ集合を拡大できるようにその視野はマーカ集合よりも大きいが、マイクロレンズ22の外側に、照準の相手である受光器または投光器を作業者が接眼レンズ21を視認できる程度に小さい。
【0029】
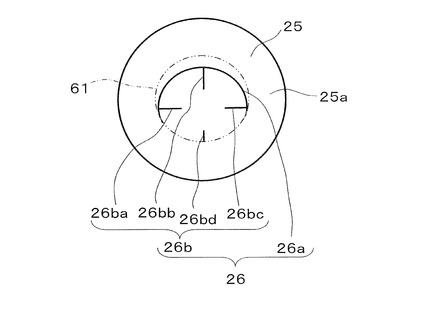
図4に戻って、対物窓24には透明なガラスや樹脂からなり、凸レンズから構成された対物レンズ25が嵌め込まれている。この対物レンズ25の照準器4の内方側の表面25aには、図6に示すようにマーカ集合26が設けられている。このマーカ集合26は、円の輪郭線つまり円周からなる軸一致マーカ(第1のマーカ)26aと、中心を示す直線からなる中心マーカ(第2のマーカ)26bとを有する。軸一致マーカ26aは、後述するように、照準軸と視軸を合致させるために用いられる。中心マーカ26bは、本実施形態では4つの線部26ba,26bb,26bcおよび26bdからなる。これら線部26ba〜26bdは、円周からなる輪郭線26a上の等間隔の4点からそれぞれ中心に向って延び、同一長さを有し、その長さは輪郭線26aによって構成される円の半径よりも短い。すなわち、軸一致マーカ26aの中心を示す直線26bは、当該円の中心およびその付近には重ならないが、当該円の中心に向かって延びる線部26ba〜26bdの仮想延長線の交点が円の中心であるため、これら線部によって円の中心位置は容易に想定される。なお、本実施形態では、中心を示す直線26bは4つの線部からなるものとしたが、この直線は、3つ以上であればいかなる数の線部からなるものであってもよい。すなわち、直線を構成する線部の仮想延長線の交点が円の中心を示すことができればよい。ただし、線部の数は、好ましくは3つ〜6つであり、さらに好ましくは4つである。
【0030】
中心マーカ26bは、また、直線以外であってもよく、軸一致マーカ26aの中心を示すことができるものであればいかなる形状からなるものであってもよい。例えば、中心マーカ26bは、十字、点または小円などの形状からなり、その中心が軸一致マーカ26aの中心と一致する。
【0031】
このように、マーカ集合26には、マーカの中心を示す直線26bが付されているため、光軸調整に有用な中心が示されている。また、この直線26bは、輪郭線26aからその中心に向って延び、かつ輪郭線26aの中心には達しない4つの線部26ba〜26bdからなるため、光軸を調整するのに有用な中心が示される一方、輪郭線26aの中心部分の対物レンズは透明のままであり、これら線部26ba〜26bdは、作業者が照準を見る際の妨げとはならない。
【0032】
円周状の軸一致マーカ26aは、対物レンズ25の表面25aに、白色のインクをプリントして形成されている。軸一致マーカ26aは、この他に、断面が三角形状または半円形状となる突起が、レンズ成形時に表面25aに一体成形されたものであっても、凹部として表面25aに一体成形されたものであってもよい。すなわち、軸一致マーカ26aは、その形状である円周が視認されるものであればいかなる方法で形成されたものであってもよい。この軸一致マーカ26aを構成する円の輪郭線の中心と対物レンズ25の中心はほぼ一致する。直線からなる中心マーカ26bについても、軸一致マーカ26aと同様の方法で対物レンズ2に設けられている。
【0033】
軸一致マーカ26aの大きさについて、さらに図7および図8を用いて詳述する。この図では、簡略化して説明するために、照準ミラー27(図4)を省き、照準ミラー27(図4)によって反射されるべき光が直進するものとして図示する。すなわち、対物レンズ25と接眼レンズ21が一直線上に配置された、簡略化された構成に基づいて、軸一致マーカ26aの大きさについて説明する。また、軸一致マーカ26aの中心を示す直線26b(図6)も簡略化のため図示していない。
【0034】
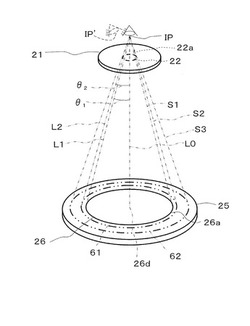
まず、軸一致マーカ26aの大きさの上限について説明する。対物レンズ25および軸一致マーカ26aの輪郭線の中心26dは一致して、マイクロレンズ22の光軸L0上に位置する。このマイクロレンズ22の光軸L0上の一点であって、マイクロレンズ22によって拡大された軸一致マーカ26aの虚像(図示せず)の明視距離(この虚像から約250mm)の位置をアイ・ポイントIPとする。このアイ・ポイントIPは、接眼レンズ21のマイクロレンズ22を覗いてマイクロレンズ22によって拡大されたマーカ集合26を見る作業者が、その目を無理させずにマーカ集合26を見ようとする場合に自然とその片方の眼球の水晶体(目)を位置付ける位置である。このアイ・ポイントIPと、円周状の軸一致マーカ26aとを結ぶ、マーカ円錐側面(第1の円錐側面)S1は、アイ・ポイントIPからマイクロレンズ22によって得られる対物レンズ25上の視野の円周状の外縁61と、アイ・ポイントIPとを結ぶ、視野円錐側面(第2の円錐側面)S2よりも内側に位置する。ここで、アイ・ポイントIPからマイクロレンズ22によって得られる対物レンズ25上の視野の直径、つまり円周状の外縁61によって囲まれる円の直径は、アイ・ポイントIPとマイクロレンズ22の外枠22aを結ぶ円錐側面S3の延長面が対物レンズ25と交わる円周状の交線62によって囲まれる円の直径を、マイクロレンズ22の倍率で除した大きさである。
【0035】
このように、アイ・ポイントIPの対物レンズ25上における視野内に軸一致マーカ26aが収まっているため、アイ・ポイントIPから接眼レンズ21を覗く作業者は、マイクロレンズ22によって拡大された軸一致マーカ26aの全体を必ず視認することができる。
【0036】
しかし、マイクロレンズ22の光軸L0上からずれた位置に片方の目を位置付けて、例えばアイ・ポイントIP’から作業者がマイクロレンズ22を覗いた場合、軸一致マーカ26aの全体を作業者が視認できるとは限らない。特に、円周状の軸一致マーカ26aが視野の外縁61と一致するか、または円周状の軸一致マーカ26aが視野の外縁61よりも僅かに小さい場合、作業者の目の位置が光軸上から僅かにずれただけで、図9に示すように、軸一致マーカ26aの一部が欠落して視認される。
【0037】
次に、軸一致マーカ26aの大きさの下限について説明する。
まず、図1の投光器2からの検知波の広がり角度は、上述したようにθ0である。そして、例えば、この広がり角度θ0は約2°である。ただし、この広がり角度θ0は機器の設計仕様によって異なるため、この数値は単なる一例である。この広がり角度θ0に対して、図7のマーカ円錐側面S1の母線L1と光軸L0のなす角度θ1と、視野円錐側面S2の母線L2と光軸L0のなす角度θ2との差Δθは、以下の式1を満足する。
【0038】
Δθ≦θ0/2 (式1)
【0039】
この式1は、軸一致マーカ26aの大きさに依存した角度θ1のマイクロレンズ視野に依存したθ2に対するずれΔθが、検知波の広がり内に収まることを意味する。そのため、式1を満足するように軸一致マーカ26aの大きさを決定すれば、光軸調整に際して視軸を照準軸に合致させるのに、この軸一致マーカ26aが有効に利用される。
【0040】
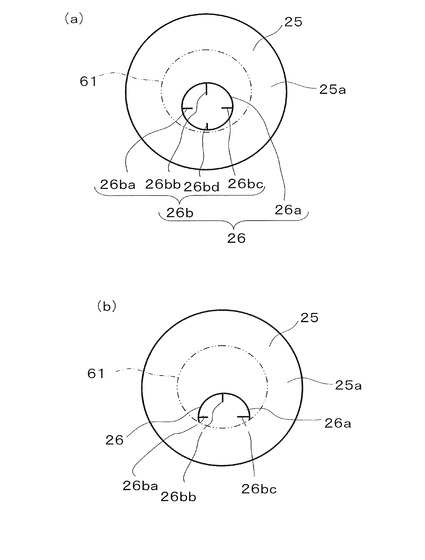
例えば、軸一致マーカ26aの大きさがその下限に近い大きさで式1を満足する、つまりΔθ=θ0/2を満足する程度の大きさである場合、軸一致マーカ26aの大きさは、マイクロレンズ22による対物レンズ25上に得られる視野の外縁61よりも、かなり小さくなる。このような軸一致マーカ26aをマイクロレンズ22から覗いて見る作業者は、図10(a)に示すように、視軸が照準軸からずれて軸一致マーカ26aの中心が視野の外縁61の中心からずれていたとしても、軸一致マーカ26aの全体を視認することができる。ここで、対物レンズ25上に得られるマイクロレンズ22による視野の外縁61は視認されるものではないため、作業者は視軸が照準軸からずれていることを認識し難い。しかし、このように視軸が照準軸からずれて光軸調整がなされると投光器と受光器の光軸は正確に一致しないかもしれないが、検知波がある程度広がっているために、その光軸のずれは許容範囲内である。一方、図10(b)に示すように、視軸がさらに照準軸からずれて、軸一致マーカ26aをマイクロレンズ22から覗いて見る作業者が、一部が欠けた軸一致マーカ26aを視認すれば、視軸のずれは許容範囲外となる。このように、軸一致マーカ26aの大きさは検知波の広がりθ0(図1)に応じて下限が決められているため、光軸調整における要求、すなわち、広がりの小さい検知波であれば光軸調整は厳密に行われなければならないのに対して、広がりの大きい検知波であれば光軸調整が厳密でなくともよいという要求に合致している。
【0041】
図2に戻って、取付用ベース33の中央部に設けられた端子台ケース39の上下部には、回転板37が図示しない鉛直軸回り(図のh方向回り)に回転自在に設けられており、この回転板37には、図4でも示した一対の支持板29が、図2の回転板37に対し直交する配置で固定されている。この両支持板29の外側面には、滑り止め付きの操作板(右方側のみ図示)38が固定されており、操作板38を手で持って回転操作することにより、受光器9の水平角(図2のh方向の角度)が粗調整される。さらに、調整ねじ40,41の正逆方向への回転操作によって微調整が行われる。
【0042】
受光器9に一体化された照準器4は、図4に示したように、受光器9の左右一体の軸受筒部28の支持板29の支軸30に回転自在に外嵌されて、支軸30回り(図2のv方向回り)に回転自在に支持されており、この照準器4の支軸30回りの回動は、図2の調整ねじ40,41の正逆方向への回転操作によって行われる。こうして、受光器9の上下角(図2のv方向の角度)が可変調節される。受光器9の投光器2に対する光軸合わせは、水平角と上下角とを可変調整することによって行われる。なお、図1の投光部1は、受光素子(図示せず)の配設位置に受光素子に代えて投光素子を配置するだけであり、その他の構成は上述した受光部8と同様である。また、このセンサ装置では、図1の2つの受光器9から共に検知信号が出力されたときに警報回路13から警報信号を出力するようになっている。
【0043】
次に、本実施形態にかかる照準器を用いた光軸調整について説明する。この防犯用センサ装置では、設置時やメンテナンス時に光軸調整を行う場合、先ず、図2の投光部1におけるベース33に着脱自在となったカバー35を開放して、作業者は、片方の目で照準器4の接眼レンズ21に設けられた図8のマイクロレンズ22を覗き込む。その際に、作業者は覗きこむ目を適切な場所に位置付ける。作業者がマイクロレンズ22を覗き込んだ際に、図10(a)のように、対物レンズ26に形成された軸一致マーカ26aの全ての部分を視認できた場合には、作業者は目の位置がずれていないと判断してもよく、その目の位置で光軸の調整を行ってもよい。これとは逆に、作業者が接眼窓25から覗きこんだ際に、図10(b)のように対物レンズ26に形成された軸一致マーカ26aの一部が欠けていることを視認した場合には、作業者は軸一致マーカ26aの全ての部分を視認できるようになるまで、接眼窓25を覗き込む目の位置を少しずつ移動させて、つまり、接眼窓25に対して目が正面にくるように方向を変化させて、軸一致マーカ26a全体が視認できる位置を探し出す。具体的には、軸一致マーカ26aの欠けが視認させる部分が存在する方向とは反対の方向に、作業者は目の位置を移動させる。例えば、軸一致マーカ26aの下部が欠けていれば、作業者は目の位置を上方に移動させて、軸一致マーカ26a全体が視認できるようにする。
【0044】
作業者が軸一致マーカ26aの全ての部分を視認できると、接眼レンズ21に設けられたマイクロレンズ22(図5)を覗き込む作業者の目が適切に位置付けられたと認識されるので、作業者は目の位置をそのままにして、操作板38を回転操作して、投光器2の水平偏向角または上下偏向角を調整し、照準ミラー27(図4)に図1の投光部1の素子ユニットの像が映るように光軸の粗調整を行う。この粗調整に続いて、作業者は、図1のレベルメータ14の表示を見ながら表示レベルが最大値になるように、図2の調整ねじ40,41を調整して光軸の微調整を行い、図1のレベルメータ14の表示が所定レベル以上になるまで、つまり受光部2の光軸が投光部1にできる限り一致するまで、投光部1および受光部2の光軸調整を必要に応じて複数回繰り返す。
【0045】
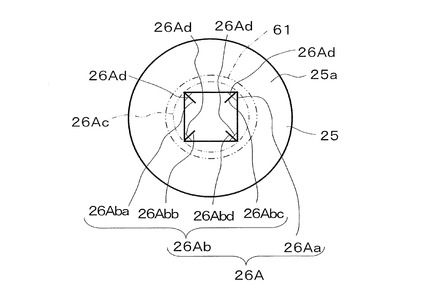
図11および図12に、それぞれ、マーカ集合の第1変形例および第2変形例を示す。図11に示す第1変形例にかかるマーカ集合26Aは、正方形の輪郭線つまり正方形の4辺からなる軸一致マーカ26Aaと、中心を示す直線26からなる中心マーカAbとを有する。このマーカ集合の例でも、中心を示す中心マーカ26Abは同一長さの4つの線部26Aba,26Abb,26Abcおよび26Abdからなる。これら線部26Aba〜26Abdは、それぞれ正方形の頂点から正方形の中心に向って延びる。また、正方形の外接円26Acの中心は対物レンズ25の中心とほぼ一致する。正方形の角部は、細線26Adで示すように、90°ではなく鈍角となるように小さく切り落とされていてもよい。
【0046】
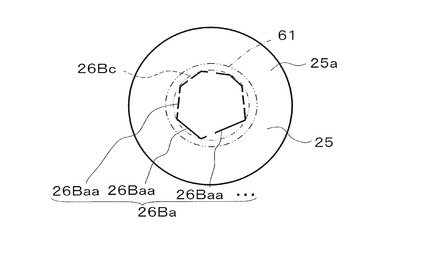
図12に示す第2変形例にかかるマーカ集合26Bの軸一致マーカ26Baは、図6および図11に示した左右上下対称形状の輪郭線とは異なり、上下左右非対称形状であって、各辺の長さが異なる7角形の輪郭線26Baからなる。この輪郭線26Baの外接円26Bcの中心は、対物レンズ25の中心にほぼ一致する。また、この軸一致マーカ26Baは、複数の輪郭線部26Baaから構成される。すなわち、軸一致マーカを構成する輪郭線26Baは、複数の途切れた箇所を有する。ただし、この輪郭線26Baは、輪郭が形作る形状が認識できる程度に輪郭線部26Baaを有するため、マイクロレンズ22(図7)を通してこのマーカ集合26Bを見る作業者にとっては、複数の輪郭線部2Baaによって認識される輪郭形状の一部が欠けたことを視認することができる。なお、このマーカ集合26Bは、中心マーカを有しないものとして示したが、有してもよい。
【0047】
図11および図12に示したように、マーカ集合26A(26B)の軸一致マーカ26Aa(26Ba)は任意の多角形の輪郭線から構成されるが、これら多角形よりも図6に示した軸一致マーカ26aのように円の輪郭線が特に好ましい。一方、円ではなく多角形の輪郭線から軸一致マーカが構成される場合、その輪郭線は、円に近い形状、つまり中心からの距離がほぼ等しい点の集まりで構成されるのが好ましい。
【0048】
次に、図11および図12に示したような円周以外の輪郭線を含む軸一致マーカの大きさについて説明する。まず、図11の正方形の輪郭線からなる軸一致マーカ26Aaの外接円26Acの大きさは、図7および図8を参照しながら説明した軸一致マーカ26aの形状である円周の大きさと同様に求められる。すなわち、この外接円26Acの大きさは、好ましくは、マイクロレンズ22の視野の外縁61に一致するか、この視野よりもわずかに小さいが、外接円26Acの大きさの許容範囲は、上述した式(1)を満足するものである。このように決定された外接円26Acの大きさに応じて、マーカ集合26Aを構成する正方形状の輪郭線からなる軸一致マーカ26Aaの大きさが設定される。図12の軸一致マーカ26Bの大きさも、同様に、軸一致マーカ26Bの外接円26Bcの大きさが、マイクロレンズ22の視野の外縁61の範囲内で、かつ式(1)を満足する大きさである。
【0049】
本実施形態にかかる目視照準器4(図2)が設けられた図2の受光部8の構造は単なる一例であり、光軸調整が必要とされる受光部および投光部であれば、いかなる構造からなるものであっても、本目視照準器4を設けることができる。
【0050】
なお、上記実施形態では検知線として赤外線ビームが用いられているが、超音波や電波を用いたものであってもよい。
【0051】
以上、本実施形態にかかる目視照準器の対物レンズには、上述した各例のような軸一致マーカが設けられているため、照準器が設けられた防犯センサの光軸を調整する際には、この軸一致マーカによって、作業者は適切な方向から目視標準機を覗くことができる。
【符号の説明】
【0052】
2 送信器
4 目視照準器
9 受信器
21 接眼レンズ
22 マイクロレンズ
25 対物レンズ
26a 軸一致マーカ
27 反射ミラー
S センサ装置
【技術分野】
【0001】
本発明は、送信器から受信器へ送信された検知線の遮断により侵入者などを検知する防犯センサに設けられる目視照準器、およびこの目視照準器を備えた防犯センサに関する。
【背景技術】
【0002】
この種の能動型防犯用センサ装置は、直線的な警戒区域の両端部に、赤外線の投光部の投光器と赤外線受光部の受光器とが、これらの光軸を一致させた配置で設置されており、直線的な近距離から数百mの長距離までの警戒区域を設定できるので、長距離になる程、投光器と受光器間での光軸を正確に一致させるのが難しい。そこで、従来の防犯用センサ装置には、図13(a)および(b)に示すような照準器が投光器および受光器にそれぞれ設けられており、センサ装置の設置またはメンテナンスに際しては前記照準器によって光軸を合わせるようになっている。
【0003】
この照準器50は、一対の接眼窓51と、一対の対物窓52と、両窓51,52間で照準軸56上に配置された一対の照準ミラー53とを備えている。なお、投光器の照準器における照準像は受光器であって、受光器の照準器における照準像は投光器であるため、投光器と受光器の光軸が一致すれば、照準軸はこの光軸と一致して、投光器と受光器が正確に対向して配置されることになる。そして、図13(a)に示すように、この照準器50を用いた光軸調整では、左右の何れか一方の接眼窓51を作業者が一方の目60で覗きながら、ダイヤルや調整ねじを操作して投光器または受光器の向きを上下左右に動かして、照準ミラー53に映る受光器または投光器の像が対物窓52の中央にくるように調整する。しかし、図13(b)に示すように、調整を行う作業者が接眼窓51を正面からではなく斜め方向から覗いた場合、視軸55が、照準軸56(すなわち、対向する投光器または受光器から延びる軸)に対してずれてしまう。このように視軸55と照準軸56とがずれた状態で光軸調整が行われると、正確に光軸が調整されない。したがって、光軸調整を行う作業者は、その視軸55をできる限り照準軸56に一致させる必要がある。これに対して、接眼窓51を覗く作業者の目を適切に位置付けて視軸と照準軸を一致させるために、照準器50の外側に向けて接眼窓51から延びた覗き筒を設けたものが存在する。しかし、広い視野をとるために接眼窓51を大きくすると、覗き筒の照準器からの突出長さが大きくなり、この照準器を備えた防犯センサの取扱いが困難になるとともに、見栄えも悪い。
【0004】
一方、特許文献1には、防犯センサではなく、カメラのファインダ装置において、ファインダ画面の中心を示すターゲットマークが対物レンズに形成され、接眼レンズにマイクロレンズが組み込まれたものが記載されている。このファインダ装置によれば、ファインダ画面の中心を示すターゲットマークがマイクロレンズを通して被写体像とともに鮮明に観察される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平08−248479号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、カメラのファインダ装置におけるターゲットマークは、被写体像をファインダ画面の中心に合致させるものである。そのため、マイクロレンズを覗く者の視軸を調整してマイクロレンズの正面に眼球を位置付ける必要性は、このようなファインダ装置には全く存在しない。
【0007】
そこで、本発明は、防犯センサに設けられる目視照準器に、マイクロレンズおよびターゲットマークを適用し、当該ターゲットマークを、照準軸と視軸を合致させるための軸一致マーカとして用いることで、照準作業を行う作業者が適切な方向から目視照準器を覗くことを容易に可能にする、目視照準器、およびこの目視照準器を備えた防犯センサを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明にかかる、防犯センサにおける、検知波の送信器および受信器のそれぞれの送信方向および受信方向を調整するための目視照準器は、マイクロレンズが設けられた接眼レンズと、前記接眼レンズの視野に含まれる第1のマーカが設けられた対物レンズと、前記接眼レンズおよび前記対物レンズの間の光路に配置された反射ミラーとを備え、前記第1のマーカは、円または三角形以上の多角形の輪郭線からなり、視軸が許容範囲から外れると前記マイクロレンズの視野から外れて一部分が欠落して視認されるように設定されている。
【0009】
ここで、「マイクロレンズ」は、凸レンズであって、対象物を拡大して目視観察させることを可能にするレンズである。
「輪郭線」は、ある形状の輪郭を示す線であるが、実線である必要はない。すなわち、輪郭線は複数の途切れた箇所を有してもよく、輪郭線には、輪郭が形作る形状が認識できる程度の間欠的な複数の輪郭線部から構成されるものも含まれる。
「視軸」は、当該目視照準器を用いて送信器の送信方向および受信器の受信方向の調整、つまり照準作業を行う、作業者の片方の目の視軸を指す。
「視軸が許容範囲から外れる」とは、送信器の送信方向および受信器の受信方向を調整する作業者の視軸の位置が適切でないために、そのような視軸による調整では、送信器からの検知波を受信器で受信できないことを言う。すなわち、たとえ視軸が照準軸と一致していなくとも、そのような視軸による調整の結果、送信器からの検知波を受信器で受信できるのであれば、視軸は「許容範囲」に含まれることになる。なお、「投光器からの検知波を受光器で受信できる」とは、当該防犯センサに受信レベルを監視する手段が設けられている場合には、この監視手段によって受信を確認できることを指すのに対して、そのような監視手段が設けられていない場合には、防犯センサごとに設定されている感度余裕の範囲内であることを指す。
【0010】
この構成によれば、視軸が許容範囲から外れると、対物レンズに設けられた第1のマーカがマイクロレンズの視野から外れて一部分が欠落して視認されるように設定されているので、当該目視照準器を用いて照準作業を行う作業者がこの第1のマーカの全体を視認できるように目の位置つまりマイクロレンズを覗く方向を調節すれば、容易に視軸を許容範囲内に入れることができる。このように、対物レンズに設けられた第1のマーカが軸一致マーカとして機能するため、照準作業を行う作業者は適切な方向から目視照準器を覗くことが容易になる。
【0011】
本発明の好ましい実施形態では、前記第1のマーカの前記輪郭線の外接円の中心は前記マイクロレンズの光軸上に位置し、前記マイクロレンズの光軸上の一点であって、前記マイクロレンズによって拡大された前記マーカの虚像の明視距離に位置する明視位置と、前記外接円の円周とを結ぶ第1の円錐側面が、前記明視位置から前記マイクロレンズによって得られる前記対物レンズ上の視野の円周状の外縁と、前記明視位置とを結ぶ第2の円錐側面よりも内側に位置し、Δθ≦θ0/2を満足する。ただし、Δθは、前記第2の円錐側面の母線と前記光軸のなす角度と、前記第1の円錐側面の母線と前記光軸のなす角度との差であり、θ0は、前記送信器からの検知波の広がり角度である。
【0012】
ここで、第1のマーカの輪郭線が円周の場合、つまり連続または不連続な円の輪郭線の場合、「第1のマーカの輪郭線の外接円」は、その円自体を指す。
「明視距離」は正常な目の近点距離であって、対象物から約250mmである。「マイクロレンズによって拡大されたマーカの虚像の明視距離」も、この虚像から約250mmである。
【0013】
この実施形態によれば、対物レンズに設けられた第1のマーカの外接円から延びた第1の円錐側面がマイクロレンズによって得られる対物レンズ上の視野の外縁から延びた第2の円錐側面よりも内側に位置するので、明視位置またはその近傍に目を位置付けた作業者がマイクロレンズを覗くと、第1のマーカはマイクロレンズによる視野内に収まる。一方、第2の円錐側面の母線と光軸のなす角度と、第1の円錐側面の母線と光軸のなす角度との差Δθが検知波の広がり角度θ0の1/2以下であるため、明視位置またはその近傍に目を位置付けた作業者がマイクロレンズを覗いて視認する第1のマーカは、マイクロレンズによる視野内の領域のある程度の割合を占有する。このため、視軸が照準軸からある程度はずれて初めて、第1のマーカはマイクロレンズによる対物レンズ上の視野範囲内からはみ出して一部が欠落することになる。これは、第1のマーカが、視野内に収まりかつ視野にほぼ等しい大きさであれば、作業者の目が明視位置から離れて視軸がずれると、すぐに第1のマーカが視野から外れて一部分が欠落して視認されるが、たとえ、第1のマーカが視野よりも小さいために作業者の目が明視位置から離れて視軸がある程度ずれるまで第1のマーカの一部分の欠落が視認されないとしても、検知波の広がりの範囲を超えれば、視軸のずれが認識されることを意味する。
【0014】
このように大きさが制限された第1のマーカは、視軸が許容範囲から外れるとマイクロレンズの視野から外れて一部分が欠落するような大きさであるため、視軸と照準軸を一致させるための軸一致マーカとして機能することができる。
【0015】
好ましくは、前記対物レンズには、前記第1のマーカの中心を示す第2のマーカが設けられている。この第2のマーカによって、照準作業に有用な中心が示される。
【0016】
さらに好ましくは、前記第2のマーカは直線からなり、当該直線は、前記輪郭線からその中心に向って延び、かつ前記輪郭線の中心には達しない長さの3つ以上の線部からなる。この中心に向って延びる線部によって、照準作業に有用な中心が示される一方、これら線部の長さは輪郭線の中心には達しないため、輪郭線の中心部分の対物レンズは透明のままであり、これら線部は、作業者が照準を見る際の妨げとはならない。
【0017】
本発明のさらに好ましい実施形態では、前記検知波は光であり、前記送信器および前記受信器は、それぞれ投光器および受光器であり、前記送信器および前記受信器のそれぞれの送信方向および受信方向の調整は、前記投光器と前記受光器の光軸合わせである。このように検知波が光の場合、赤外線ビームが特に好ましい。前記検知波は、光の他にも、電波であってもよく、マイクロ波が特に好ましい。前記検知波は、また、レーザであってもよい。前記検知波は、さらに、超音波であってもよい。
【0018】
本発明にかかる、送信器および受信器を備えた防犯センサは、前記目視照準器を備える。
【発明の効果】
【0019】
本発明の目視照準器によれば、目視照準器を用いて照準作業を行う作業者の片方の目の視軸が許容範囲内に入った状態でこの作業者が照準作業を行うことで、送信器の送信方向と受信器の受信方向のずれを許容範囲内にすることができる。そのため、このように照準作業が行われると、防犯センサの作動時に、送信器からの検知波を受信器で必ず受信することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の照準器が適用される防犯センサ装置を示すブロック図である。
【図2】本発明の一実施形態に係る照準器が組み込まれた受光部を示す斜視図である。
【図3】本発明の一実施形態に係る照準器を示す斜視図である。
【図4】図3の照準器を示す概略横断面図である。
【図5】図3の照準器に設けられた接眼レンズを照準器の内側から見た正面図である。
【図6】図3の照準器に設けられた対物レンズを照準器の内側から見た正面図であって、対物レンズに設けられたマーカ集合の一例を示す図である。
【図7】図3の照準器の構成を簡略化して示した斜視図である。
【図8】図7の照準器の構成に対応した模式図である。
【図9】図3の照準器の対物レンズに設けられた軸一致マーカであって、軸一致マーカの大きさが視野の外縁にほぼ等しい場合における、軸一致マーカの視認された様子を示す図である。
【図10】(a)および(b)は、図3の照準器の対物レンズに設けられた軸一致マーカであって、軸一致マーカの大きさが視野の外縁よりもかなり小さい場合における、軸一致マーカの視認された様子を示す図であり、(a)は軸一致マーカの全体が視認されている様子、(b)は軸一致マーカの一部が欠けて視認されている様子を示す図である。
【図11】図3の照準器に設けられた対物レンズを照準器の内側から見た正面図であって、図6のマーカ集合の第1変形例を示す図である。
【図12】図3の照準器に設けられた対物レンズを照準器の内側から見た正面図であって、図6のマーカ集合の第2変形例を示す図である。
【図13】(a)および(b)は、従来の照準器を用いた光軸調整を示す照準器の概略横断面図である。
【発明を実施するための形態】
【0021】
以下、本発明の各実施形態を図面に基づいて説明する。
図1は本発明の一実施形態に係る照準器が適用される防犯用センサ装置を示すブロック構成図である。この防犯用センサ装置Sは、例えば200m以上の直線的な警戒区域の両端部の壁面またはポールに光軸を一致させて相対向する配置で設置される投光部1と受光部8とからなり、投光部1および受光部8は共にユニット化された構成になっている。
【0022】
投光部1は投光器2および投光器駆動回路3を有しており、この投光器2および投光器駆動回路3は、後述するように、一対設けられているが、図1では1つのみを示している。投光器2は、赤外線発光ダイオードのような投光素子と、この投光素子から発生した赤外線を反射して一定方向に向かう近赤外線のような赤外線ビームIRとして出射する出射ミラーとを備えている。投光器駆動回路3は投光器2の投光素子を所定の周波数で発光駆動してパルス変調波からなる赤外線ビームIRを出射させる。この赤外線ビームIRの広がり角度、つまり検知波の広がり角度をθ0とする。
【0023】
一方、受光部8では、集光ミラーとフォトトランジスタなどの受光素子とを備えた受光器9が、投光部1からの赤外線ビームIRを受光して、その赤外線受光量に応じた信号レベルの電気信号を出力し、この電気信号が増幅回路10で増幅されたのちに、検波回路11で外乱光を除去されてパルス変調波のみによる受光信号のレベルに応じた信号に変換され、この信号レベルが予め設定された侵入検知レベル以下であるか否かを信号判別回路12で判別される。信号判別回路12は、投光部1からの赤外線ビームIRが不法浸入者により遮られて受光信号レベルが予め設定された侵入検知レベル以下であると判別したときに、検知信号を出力する。警報回路13は、信号判別回路12から検知信号が入力することによって駆動され、不法浸入者が存在することを報知するための警報信号を、例えば図示しない警備センターへ出力するようになっている。
【0024】
受光部8の検波回路11には電圧計のようなレベルメータ14が接続されており、このレベルメータ14には、受光器9の赤外線受光量に比例した信号レベルが表示される。検波回路11には、レベルメータ14とは別に、受光信号のレベルが所定レベルを越えたときに点灯するレベル表示器が接続されることもある。前記受光器9、増幅回路10、検波回路11、信号判別回路12およびレベルメータ14も、後述するように、一対設けられているが、図1では1つのみを示している。
【0025】
図2は、受光部8を示す斜視図であり、この例では、受光部8は、上下2つの受光器9を有する。投光部1も同様の構成になっているので、同図には投光部1における相当部品に対応する符号をも併せて付してある。受光部8は、壁やポールなどの取付面に取り付けられる取付用ベース33と、この取付用ベース33にこれの複数の取付孔34を介して着脱自在に取り付けられてセンサ回路全体を覆うカバー35とにより、外体ケースが構成されている。受光器9は、集光ミラー31の焦点位置に受光素子(図示せず)が配置され、その集光ミラー31の開口部がミラーカバー36で覆われている。
【0026】
受光器9と投光器2の光軸の粗調整に用いられる、本発明にかかる照準器4は、図3に示すように、本体ケース7を備え、この本体ケース7は、第1ケース17と第2ケース18とを合体して構成されている。第1ケース17は、前側面に左右一対の接眼窓(のぞき窓)20と左右一対の対物窓24とを有する。
【0027】
第2ケース18は、第1ケース17の後部に例えばねじ止め手段(図示せず)で連結されており、図4に示すように、両側面から突設された一対の軸受筒部28を有する。本体ケース7内には、照準ミラー27が対物窓24との間で照準軸32上に配置され、これにより、照準器4が構成されている。
【0028】
接眼窓20には透明なガラスや樹脂からなり、凹レンズから構成された接眼レンズ21が嵌め込まれている。図5に示すように、接眼レンズ21の対物側の面には、その中心部に、正面から見て円形状のマイクロレンズ22が設けられている。具体的には、接眼レンズ21およびマイクロレンズ22は、接眼レンズ21の光軸およびマイクロレンズ22の光軸が一致するように一体成形されている。マイクロレンズ22は、凸レンズからなり、物体を拡大して映すことができる。マイクロレンズ22は、後述するマーカ集合を拡大できるようにその視野はマーカ集合よりも大きいが、マイクロレンズ22の外側に、照準の相手である受光器または投光器を作業者が接眼レンズ21を視認できる程度に小さい。
【0029】
図4に戻って、対物窓24には透明なガラスや樹脂からなり、凸レンズから構成された対物レンズ25が嵌め込まれている。この対物レンズ25の照準器4の内方側の表面25aには、図6に示すようにマーカ集合26が設けられている。このマーカ集合26は、円の輪郭線つまり円周からなる軸一致マーカ(第1のマーカ)26aと、中心を示す直線からなる中心マーカ(第2のマーカ)26bとを有する。軸一致マーカ26aは、後述するように、照準軸と視軸を合致させるために用いられる。中心マーカ26bは、本実施形態では4つの線部26ba,26bb,26bcおよび26bdからなる。これら線部26ba〜26bdは、円周からなる輪郭線26a上の等間隔の4点からそれぞれ中心に向って延び、同一長さを有し、その長さは輪郭線26aによって構成される円の半径よりも短い。すなわち、軸一致マーカ26aの中心を示す直線26bは、当該円の中心およびその付近には重ならないが、当該円の中心に向かって延びる線部26ba〜26bdの仮想延長線の交点が円の中心であるため、これら線部によって円の中心位置は容易に想定される。なお、本実施形態では、中心を示す直線26bは4つの線部からなるものとしたが、この直線は、3つ以上であればいかなる数の線部からなるものであってもよい。すなわち、直線を構成する線部の仮想延長線の交点が円の中心を示すことができればよい。ただし、線部の数は、好ましくは3つ〜6つであり、さらに好ましくは4つである。
【0030】
中心マーカ26bは、また、直線以外であってもよく、軸一致マーカ26aの中心を示すことができるものであればいかなる形状からなるものであってもよい。例えば、中心マーカ26bは、十字、点または小円などの形状からなり、その中心が軸一致マーカ26aの中心と一致する。
【0031】
このように、マーカ集合26には、マーカの中心を示す直線26bが付されているため、光軸調整に有用な中心が示されている。また、この直線26bは、輪郭線26aからその中心に向って延び、かつ輪郭線26aの中心には達しない4つの線部26ba〜26bdからなるため、光軸を調整するのに有用な中心が示される一方、輪郭線26aの中心部分の対物レンズは透明のままであり、これら線部26ba〜26bdは、作業者が照準を見る際の妨げとはならない。
【0032】
円周状の軸一致マーカ26aは、対物レンズ25の表面25aに、白色のインクをプリントして形成されている。軸一致マーカ26aは、この他に、断面が三角形状または半円形状となる突起が、レンズ成形時に表面25aに一体成形されたものであっても、凹部として表面25aに一体成形されたものであってもよい。すなわち、軸一致マーカ26aは、その形状である円周が視認されるものであればいかなる方法で形成されたものであってもよい。この軸一致マーカ26aを構成する円の輪郭線の中心と対物レンズ25の中心はほぼ一致する。直線からなる中心マーカ26bについても、軸一致マーカ26aと同様の方法で対物レンズ2に設けられている。
【0033】
軸一致マーカ26aの大きさについて、さらに図7および図8を用いて詳述する。この図では、簡略化して説明するために、照準ミラー27(図4)を省き、照準ミラー27(図4)によって反射されるべき光が直進するものとして図示する。すなわち、対物レンズ25と接眼レンズ21が一直線上に配置された、簡略化された構成に基づいて、軸一致マーカ26aの大きさについて説明する。また、軸一致マーカ26aの中心を示す直線26b(図6)も簡略化のため図示していない。
【0034】
まず、軸一致マーカ26aの大きさの上限について説明する。対物レンズ25および軸一致マーカ26aの輪郭線の中心26dは一致して、マイクロレンズ22の光軸L0上に位置する。このマイクロレンズ22の光軸L0上の一点であって、マイクロレンズ22によって拡大された軸一致マーカ26aの虚像(図示せず)の明視距離(この虚像から約250mm)の位置をアイ・ポイントIPとする。このアイ・ポイントIPは、接眼レンズ21のマイクロレンズ22を覗いてマイクロレンズ22によって拡大されたマーカ集合26を見る作業者が、その目を無理させずにマーカ集合26を見ようとする場合に自然とその片方の眼球の水晶体(目)を位置付ける位置である。このアイ・ポイントIPと、円周状の軸一致マーカ26aとを結ぶ、マーカ円錐側面(第1の円錐側面)S1は、アイ・ポイントIPからマイクロレンズ22によって得られる対物レンズ25上の視野の円周状の外縁61と、アイ・ポイントIPとを結ぶ、視野円錐側面(第2の円錐側面)S2よりも内側に位置する。ここで、アイ・ポイントIPからマイクロレンズ22によって得られる対物レンズ25上の視野の直径、つまり円周状の外縁61によって囲まれる円の直径は、アイ・ポイントIPとマイクロレンズ22の外枠22aを結ぶ円錐側面S3の延長面が対物レンズ25と交わる円周状の交線62によって囲まれる円の直径を、マイクロレンズ22の倍率で除した大きさである。
【0035】
このように、アイ・ポイントIPの対物レンズ25上における視野内に軸一致マーカ26aが収まっているため、アイ・ポイントIPから接眼レンズ21を覗く作業者は、マイクロレンズ22によって拡大された軸一致マーカ26aの全体を必ず視認することができる。
【0036】
しかし、マイクロレンズ22の光軸L0上からずれた位置に片方の目を位置付けて、例えばアイ・ポイントIP’から作業者がマイクロレンズ22を覗いた場合、軸一致マーカ26aの全体を作業者が視認できるとは限らない。特に、円周状の軸一致マーカ26aが視野の外縁61と一致するか、または円周状の軸一致マーカ26aが視野の外縁61よりも僅かに小さい場合、作業者の目の位置が光軸上から僅かにずれただけで、図9に示すように、軸一致マーカ26aの一部が欠落して視認される。
【0037】
次に、軸一致マーカ26aの大きさの下限について説明する。
まず、図1の投光器2からの検知波の広がり角度は、上述したようにθ0である。そして、例えば、この広がり角度θ0は約2°である。ただし、この広がり角度θ0は機器の設計仕様によって異なるため、この数値は単なる一例である。この広がり角度θ0に対して、図7のマーカ円錐側面S1の母線L1と光軸L0のなす角度θ1と、視野円錐側面S2の母線L2と光軸L0のなす角度θ2との差Δθは、以下の式1を満足する。
【0038】
Δθ≦θ0/2 (式1)
【0039】
この式1は、軸一致マーカ26aの大きさに依存した角度θ1のマイクロレンズ視野に依存したθ2に対するずれΔθが、検知波の広がり内に収まることを意味する。そのため、式1を満足するように軸一致マーカ26aの大きさを決定すれば、光軸調整に際して視軸を照準軸に合致させるのに、この軸一致マーカ26aが有効に利用される。
【0040】
例えば、軸一致マーカ26aの大きさがその下限に近い大きさで式1を満足する、つまりΔθ=θ0/2を満足する程度の大きさである場合、軸一致マーカ26aの大きさは、マイクロレンズ22による対物レンズ25上に得られる視野の外縁61よりも、かなり小さくなる。このような軸一致マーカ26aをマイクロレンズ22から覗いて見る作業者は、図10(a)に示すように、視軸が照準軸からずれて軸一致マーカ26aの中心が視野の外縁61の中心からずれていたとしても、軸一致マーカ26aの全体を視認することができる。ここで、対物レンズ25上に得られるマイクロレンズ22による視野の外縁61は視認されるものではないため、作業者は視軸が照準軸からずれていることを認識し難い。しかし、このように視軸が照準軸からずれて光軸調整がなされると投光器と受光器の光軸は正確に一致しないかもしれないが、検知波がある程度広がっているために、その光軸のずれは許容範囲内である。一方、図10(b)に示すように、視軸がさらに照準軸からずれて、軸一致マーカ26aをマイクロレンズ22から覗いて見る作業者が、一部が欠けた軸一致マーカ26aを視認すれば、視軸のずれは許容範囲外となる。このように、軸一致マーカ26aの大きさは検知波の広がりθ0(図1)に応じて下限が決められているため、光軸調整における要求、すなわち、広がりの小さい検知波であれば光軸調整は厳密に行われなければならないのに対して、広がりの大きい検知波であれば光軸調整が厳密でなくともよいという要求に合致している。
【0041】
図2に戻って、取付用ベース33の中央部に設けられた端子台ケース39の上下部には、回転板37が図示しない鉛直軸回り(図のh方向回り)に回転自在に設けられており、この回転板37には、図4でも示した一対の支持板29が、図2の回転板37に対し直交する配置で固定されている。この両支持板29の外側面には、滑り止め付きの操作板(右方側のみ図示)38が固定されており、操作板38を手で持って回転操作することにより、受光器9の水平角(図2のh方向の角度)が粗調整される。さらに、調整ねじ40,41の正逆方向への回転操作によって微調整が行われる。
【0042】
受光器9に一体化された照準器4は、図4に示したように、受光器9の左右一体の軸受筒部28の支持板29の支軸30に回転自在に外嵌されて、支軸30回り(図2のv方向回り)に回転自在に支持されており、この照準器4の支軸30回りの回動は、図2の調整ねじ40,41の正逆方向への回転操作によって行われる。こうして、受光器9の上下角(図2のv方向の角度)が可変調節される。受光器9の投光器2に対する光軸合わせは、水平角と上下角とを可変調整することによって行われる。なお、図1の投光部1は、受光素子(図示せず)の配設位置に受光素子に代えて投光素子を配置するだけであり、その他の構成は上述した受光部8と同様である。また、このセンサ装置では、図1の2つの受光器9から共に検知信号が出力されたときに警報回路13から警報信号を出力するようになっている。
【0043】
次に、本実施形態にかかる照準器を用いた光軸調整について説明する。この防犯用センサ装置では、設置時やメンテナンス時に光軸調整を行う場合、先ず、図2の投光部1におけるベース33に着脱自在となったカバー35を開放して、作業者は、片方の目で照準器4の接眼レンズ21に設けられた図8のマイクロレンズ22を覗き込む。その際に、作業者は覗きこむ目を適切な場所に位置付ける。作業者がマイクロレンズ22を覗き込んだ際に、図10(a)のように、対物レンズ26に形成された軸一致マーカ26aの全ての部分を視認できた場合には、作業者は目の位置がずれていないと判断してもよく、その目の位置で光軸の調整を行ってもよい。これとは逆に、作業者が接眼窓25から覗きこんだ際に、図10(b)のように対物レンズ26に形成された軸一致マーカ26aの一部が欠けていることを視認した場合には、作業者は軸一致マーカ26aの全ての部分を視認できるようになるまで、接眼窓25を覗き込む目の位置を少しずつ移動させて、つまり、接眼窓25に対して目が正面にくるように方向を変化させて、軸一致マーカ26a全体が視認できる位置を探し出す。具体的には、軸一致マーカ26aの欠けが視認させる部分が存在する方向とは反対の方向に、作業者は目の位置を移動させる。例えば、軸一致マーカ26aの下部が欠けていれば、作業者は目の位置を上方に移動させて、軸一致マーカ26a全体が視認できるようにする。
【0044】
作業者が軸一致マーカ26aの全ての部分を視認できると、接眼レンズ21に設けられたマイクロレンズ22(図5)を覗き込む作業者の目が適切に位置付けられたと認識されるので、作業者は目の位置をそのままにして、操作板38を回転操作して、投光器2の水平偏向角または上下偏向角を調整し、照準ミラー27(図4)に図1の投光部1の素子ユニットの像が映るように光軸の粗調整を行う。この粗調整に続いて、作業者は、図1のレベルメータ14の表示を見ながら表示レベルが最大値になるように、図2の調整ねじ40,41を調整して光軸の微調整を行い、図1のレベルメータ14の表示が所定レベル以上になるまで、つまり受光部2の光軸が投光部1にできる限り一致するまで、投光部1および受光部2の光軸調整を必要に応じて複数回繰り返す。
【0045】
図11および図12に、それぞれ、マーカ集合の第1変形例および第2変形例を示す。図11に示す第1変形例にかかるマーカ集合26Aは、正方形の輪郭線つまり正方形の4辺からなる軸一致マーカ26Aaと、中心を示す直線26からなる中心マーカAbとを有する。このマーカ集合の例でも、中心を示す中心マーカ26Abは同一長さの4つの線部26Aba,26Abb,26Abcおよび26Abdからなる。これら線部26Aba〜26Abdは、それぞれ正方形の頂点から正方形の中心に向って延びる。また、正方形の外接円26Acの中心は対物レンズ25の中心とほぼ一致する。正方形の角部は、細線26Adで示すように、90°ではなく鈍角となるように小さく切り落とされていてもよい。
【0046】
図12に示す第2変形例にかかるマーカ集合26Bの軸一致マーカ26Baは、図6および図11に示した左右上下対称形状の輪郭線とは異なり、上下左右非対称形状であって、各辺の長さが異なる7角形の輪郭線26Baからなる。この輪郭線26Baの外接円26Bcの中心は、対物レンズ25の中心にほぼ一致する。また、この軸一致マーカ26Baは、複数の輪郭線部26Baaから構成される。すなわち、軸一致マーカを構成する輪郭線26Baは、複数の途切れた箇所を有する。ただし、この輪郭線26Baは、輪郭が形作る形状が認識できる程度に輪郭線部26Baaを有するため、マイクロレンズ22(図7)を通してこのマーカ集合26Bを見る作業者にとっては、複数の輪郭線部2Baaによって認識される輪郭形状の一部が欠けたことを視認することができる。なお、このマーカ集合26Bは、中心マーカを有しないものとして示したが、有してもよい。
【0047】
図11および図12に示したように、マーカ集合26A(26B)の軸一致マーカ26Aa(26Ba)は任意の多角形の輪郭線から構成されるが、これら多角形よりも図6に示した軸一致マーカ26aのように円の輪郭線が特に好ましい。一方、円ではなく多角形の輪郭線から軸一致マーカが構成される場合、その輪郭線は、円に近い形状、つまり中心からの距離がほぼ等しい点の集まりで構成されるのが好ましい。
【0048】
次に、図11および図12に示したような円周以外の輪郭線を含む軸一致マーカの大きさについて説明する。まず、図11の正方形の輪郭線からなる軸一致マーカ26Aaの外接円26Acの大きさは、図7および図8を参照しながら説明した軸一致マーカ26aの形状である円周の大きさと同様に求められる。すなわち、この外接円26Acの大きさは、好ましくは、マイクロレンズ22の視野の外縁61に一致するか、この視野よりもわずかに小さいが、外接円26Acの大きさの許容範囲は、上述した式(1)を満足するものである。このように決定された外接円26Acの大きさに応じて、マーカ集合26Aを構成する正方形状の輪郭線からなる軸一致マーカ26Aaの大きさが設定される。図12の軸一致マーカ26Bの大きさも、同様に、軸一致マーカ26Bの外接円26Bcの大きさが、マイクロレンズ22の視野の外縁61の範囲内で、かつ式(1)を満足する大きさである。
【0049】
本実施形態にかかる目視照準器4(図2)が設けられた図2の受光部8の構造は単なる一例であり、光軸調整が必要とされる受光部および投光部であれば、いかなる構造からなるものであっても、本目視照準器4を設けることができる。
【0050】
なお、上記実施形態では検知線として赤外線ビームが用いられているが、超音波や電波を用いたものであってもよい。
【0051】
以上、本実施形態にかかる目視照準器の対物レンズには、上述した各例のような軸一致マーカが設けられているため、照準器が設けられた防犯センサの光軸を調整する際には、この軸一致マーカによって、作業者は適切な方向から目視標準機を覗くことができる。
【符号の説明】
【0052】
2 送信器
4 目視照準器
9 受信器
21 接眼レンズ
22 マイクロレンズ
25 対物レンズ
26a 軸一致マーカ
27 反射ミラー
S センサ装置
【特許請求の範囲】
【請求項1】
防犯センサにおける、検知波の送信器および受信器のそれぞれの送信方向および受信方向を調整するための目視照準器であって、
マイクロレンズが設けられた接眼レンズと、
前記接眼レンズの視野に含まれる第1のマーカが設けられた対物レンズと、
前記接眼レンズおよび前記対物レンズの間の光路に配置された反射ミラーとを備え、
前記第1のマーカは、円または三角形以上の多角形の輪郭線からなり、視軸が許容範囲から外れると前記マイクロレンズの視野から外れて一部分が欠落して視認されるように設定されている、目視照準器。
【請求項2】
請求項1において、前記第1のマーカの前記輪郭線の外接円の中心は前記マイクロレンズの光軸上に位置し、
前記マイクロレンズの光軸上の一点であって、前記マイクロレンズによって拡大された前記マーカの虚像の明視距離に位置する明視位置と、前記外接円の円周とを結ぶ第1の円錐側面が、前記明視位置から前記マイクロレンズによって得られる前記対物レンズ上の視野の円周状の外縁と、前記明視位置とを結ぶ第2の円錐側面よりも内側に位置し、
Δθ≦θ0/2 (式1)
を満足する、目視照準装置。
ただし、Δθは、前記第2の円錐側面の母線と前記光軸のなす角度と、前記第1の円錐側面の母線と前記光軸のなす角度との差であり、θ0は、前記送信器からの検知波の広がり角度である。
【請求項3】
請求項1または2において、前記対物レンズには、前記第1のマーカの中心を示す第2のマーカが設けられている、目視照準装置。
【請求項4】
請求項3において、前記第2のマーカは直線からなり、当該直線は、前記輪郭線からその中心に向って延び、かつ前記輪郭線の中心には達しない長さの3つ以上の線部からなる、目視照準装置。
【請求項5】
請求項1から4のいずれか一項において、前記検知波は光であり、前記送信器および前記受信器は、それぞれ投光器および受光器であり、前記送信器および前記受信器のそれぞれの送信方向および受信方向の調整は、前記投光器と前記受光器の光軸合わせである、目視照準装置。
【請求項6】
送信器および受信器を備えた防犯センサであって、さらに、
請求項1から5のいずれか一項に記載の目視照準器を備えた防犯センサ。
【請求項1】
防犯センサにおける、検知波の送信器および受信器のそれぞれの送信方向および受信方向を調整するための目視照準器であって、
マイクロレンズが設けられた接眼レンズと、
前記接眼レンズの視野に含まれる第1のマーカが設けられた対物レンズと、
前記接眼レンズおよび前記対物レンズの間の光路に配置された反射ミラーとを備え、
前記第1のマーカは、円または三角形以上の多角形の輪郭線からなり、視軸が許容範囲から外れると前記マイクロレンズの視野から外れて一部分が欠落して視認されるように設定されている、目視照準器。
【請求項2】
請求項1において、前記第1のマーカの前記輪郭線の外接円の中心は前記マイクロレンズの光軸上に位置し、
前記マイクロレンズの光軸上の一点であって、前記マイクロレンズによって拡大された前記マーカの虚像の明視距離に位置する明視位置と、前記外接円の円周とを結ぶ第1の円錐側面が、前記明視位置から前記マイクロレンズによって得られる前記対物レンズ上の視野の円周状の外縁と、前記明視位置とを結ぶ第2の円錐側面よりも内側に位置し、
Δθ≦θ0/2 (式1)
を満足する、目視照準装置。
ただし、Δθは、前記第2の円錐側面の母線と前記光軸のなす角度と、前記第1の円錐側面の母線と前記光軸のなす角度との差であり、θ0は、前記送信器からの検知波の広がり角度である。
【請求項3】
請求項1または2において、前記対物レンズには、前記第1のマーカの中心を示す第2のマーカが設けられている、目視照準装置。
【請求項4】
請求項3において、前記第2のマーカは直線からなり、当該直線は、前記輪郭線からその中心に向って延び、かつ前記輪郭線の中心には達しない長さの3つ以上の線部からなる、目視照準装置。
【請求項5】
請求項1から4のいずれか一項において、前記検知波は光であり、前記送信器および前記受信器は、それぞれ投光器および受光器であり、前記送信器および前記受信器のそれぞれの送信方向および受信方向の調整は、前記投光器と前記受光器の光軸合わせである、目視照準装置。
【請求項6】
送信器および受信器を備えた防犯センサであって、さらに、
請求項1から5のいずれか一項に記載の目視照準器を備えた防犯センサ。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−104887(P2013−104887A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246387(P2011−246387)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000103736)オプテックス株式会社 (116)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000103736)オプテックス株式会社 (116)
【Fターム(参考)】
[ Back to top ]