
管内移動装置
【課題】異なる管径に適用可能であり、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状変化部を通過することができる管内移動装置を提供する。
【解決手段】本体Dから外側に延設された複数のアーム部Eを備え、アーム部Eの先端部に駆動輪W1が支持され、駆動輪W1を管内壁に押圧する付勢手段Kが備えられ、本体Dの中心軸に沿って本体Dの移動方向に延びる第1直線L1に対して、駆動輪W1が管内壁に接触する接触点を通りその接線方向に延びる第2直線L2が交差する場合に、第1直線L1に対する第2直線L2の交差により形成される交差角度Aの大きさの変化に伴って駆動輪W1の回転速度を変更させる速度調整機構を備え、速度調整機構は、本体Dが直管状の管内を移動する状態における第1直線L1と第2直線L2との相対的な位置関係である基準位置関係に基づいて駆動輪W1の回転速度を増速又は減速させる。
【解決手段】本体Dから外側に延設された複数のアーム部Eを備え、アーム部Eの先端部に駆動輪W1が支持され、駆動輪W1を管内壁に押圧する付勢手段Kが備えられ、本体Dの中心軸に沿って本体Dの移動方向に延びる第1直線L1に対して、駆動輪W1が管内壁に接触する接触点を通りその接線方向に延びる第2直線L2が交差する場合に、第1直線L1に対する第2直線L2の交差により形成される交差角度Aの大きさの変化に伴って駆動輪W1の回転速度を変更させる速度調整機構を備え、速度調整機構は、本体Dが直管状の管内を移動する状態における第1直線L1と第2直線L2との相対的な位置関係である基準位置関係に基づいて駆動輪W1の回転速度を増速又は減速させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、本体とその本体から外側に延設された複数のアーム部を備え、前記複数のアーム部は、前記本体の周方向に分散して配置されており、前記複数のアーム部の夫々は、その先端部に管内壁に接触して回転駆動自在な駆動輪が支持され、その基端部が前記本体に揺動自在に接続され、前記駆動輪を管内壁に押圧する側に前記アーム部を付勢する付勢手段が備えられている管内移動装置に関する。
【背景技術】
【0002】
地下に埋設されているガス配管の検査は、地面を掘削し配管を露出して検査を行うことができるが、その配管の量が膨大であることや、建造物の地下など人の進入が困難な場所に埋設されている配管も多く存在することなどから、それらの作業は容易ではない。また、埋設配管を露出する際の経済的コスト、検査効率など、対象配管上の地面全体を掘削する手法には多くの面で課題が残されている。そこで、地面を掘削せずに配管検査を実施するために管内移動装置が必要となっている。
【0003】
従来の管内移動装置として、例えば、特許文献1には、複数のユニットが屈曲可能に連結体によって連結された管内移動装置が開示されており、管内移動装置の前端及び後端のユニットには、周方向の均等4方向に放射状の配置で、管内面に接する少なくとも一対の駆動輪と一対の従動輪を備えており、その駆動輪には走行モータと、その駆動輪の走行方向を転換する操舵モータが附属されている。
また、前端及び後端以外のユニットには、周方向の均等4方向に放射状の配置で、管内面に接する従動輪が備えられている。駆動輪の支持部には、配管の製作誤差や変形、或いは異物の付着等に原因する管内径の変化を吸収して安定な走行を円滑に行うための復元バネを装着したサスペンション機構が設けられ、従動輪の支持部には、従動輪を管壁へ押し付けるためにバネ等による弾性的なサスペンション機構が設けられている。
そして、前端及び後端のユニットに設けられた駆動輪の走行制御及び駆動輪の操舵制御は、当該ロボットとケーブルで接続された管外のコントローラを通じて行われている。これにより、管内移動装置の構造が簡単で、走行動作も単純にすることができるとされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−52282号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、管内移動装置が送り込まれる配管の内部は一様な形状とは限らない。例えば、配管の途中にはレジューサが設置されて配管の内径が大きく変化している縮径部や、エルボなどが設置された曲が部もある。
例えば、特許文献1に記載の管内移動装置の場合、管内移動装置のユニットには、
駆動輪および従動輪を支持部には、配管の製作誤差などを許容するサスペンション機構が設けられているにとどまり、配管の内径が変化するレジューサなどの縮径部を通過することはできない。また、エルボなどの曲り部では、その曲る方向に管内移動装置の回転可能な方向を合わせることで通過することができるとも考えられるが、先端および後端のユニットに備えられた一対の駆動輪において、駆動輪ごとに回転速度制御を行なう機構を有さず、エルボ通過時に発生する、エルボの内側と外側の移動距離の違いを一対の駆動輪において調整することができずにスムーズにエルボなどの曲り部を通過することも困難となる。
【0006】
本発明は、かかる事情に鑑みてなされたものであり、その目的は、異なる管径に適用可能であり、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状変化部を通過することができる管内移動装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明に係る管内移動装置は、
本体とその本体から外側に延設された複数のアーム部を備え、前記複数のアーム部は、前記本体の周方向に分散して配置されており、前記複数のアーム部の夫々は、その先端部に管内壁に接触して回転駆動自在な駆動輪が支持され、その基端部が前記本体に揺動自在に接続され、前記駆動輪を前記管内壁に押圧する側に前記アーム部を付勢する付勢手段が備えられている管内移動装置であって、
その特徴構成は、前記本体の中心軸に沿って前記本体の移動方向に延びる第1直線に対して、前記駆動輪が前記管内壁に接触する接触点を通りその接線方向に延びる第2直線が交差する場合に、前記第1直線に対する前記第2直線の交差により形成される交差角度の大きさの変化に伴って前記駆動輪の回転速度を変更させる速度調整機構を備え、
前記速度調整機構は、前記本体が直管状の管内を移動する状態における前記第1直線と前記第2直線との相対的な位置関係である基準位置関係に基づいて前記駆動輪の回転速度を増速又は減速させる点にある。
【0008】
上記特徴構成によれば、本体から外側に延設された複数のアーム部は、本体の周方向に分散して配置されて、その先端部に管内壁に接触する駆動輪が支持されている。これにより、複数のアーム部は、管内壁に駆動輪を接触した状態で本体を管内の中心側に位置させることができる。また、アーム部は本体に揺動自在に接続され、駆動輪を管内壁に押圧する側に付勢する付勢手段がアーム部に備えられているので、駆動輪の駆動力を確実に管内壁に伝えることができる。
そして、本体の中心軸に沿って本体の移動方向に延びる第1直線に対して、駆動輪が管内壁に接触する接触点を通りその接線方向に延びる第2直線が交差する交差角度の大きさの変化に伴って駆動輪の回転速度を変更させる速度調整機構を備えるので、管内の形状変化部である曲り部や縮径部などにおいて、本体の移動方向に対する駆動輪の管内壁の接線方向の変化に対応して、駆動輪の回転速度を変更することができる。さらに、複数のアーム部ごとに交差角度が代表されるので、夫々のアーム部の駆動輪の回転速度が調整される。従って、管内の形状変化部である曲り部や縮径部などにおいて夫々のアーム部の駆動輪の回転速度が独立して調整されて、管内の形状の変化に対応することができる。
【0009】
また、本体が直管状の管内を移動する状態における第1直線と第2直線との相対的な位置関係である基準位置関係を基準として、駆動輪の回転速度を増速又は減速させるため、直管状の管内を移動する状態である基準位置関係における駆動輪の回転速度を基準として、管内の形状の変化部である曲り部や縮径部などにおける交差角度の大きさの変化に伴って駆動輪の回転速度を変更して決定することができる。例えば、縮径部においては、管内を管内移動装置が移動方向に一定距離だけ移動する場合、縮径部の傾斜壁面の駆動輪の走行距離は直管状の管内壁よりも傾斜している分だけ長くなる。この場合、管内移動装置が移動方向の速度を保ちつつ縮径部を通過するためには、その傾斜壁面を移動する駆動輪の回転速度を直管状の管内壁を移動する場合より速くする必要がある。
ここで、縮径部において駆動輪が傾斜壁面と接触して交差角度が変化し、この交差角度の変化によって駆動輪の回転速度を、直管状の管内壁を移動する状態の基準位置関係における駆動輪の回転速度より速くすることができ、上述の如く、管内移動装置がその移動方向の速度を維持しつつ滑らかに縮径部を通過することができる。
このように、管内の形状の変化部に対応して受動的な速度調整を可能としてスムーズに形状変化部を通過することができる。
【0010】
本発明に係る管内移動装置の更なる特徴構成は、前記速度調整機構は、前記駆動輪に設けられた半球状体と、前記半球状体の球状表面部に接触して回転駆動力を前記駆動輪に伝達する動力伝達輪と、前記交差角度の大きさの変化に応じて前記動力伝達輪が前記球状表面部に接触する位置を変更して、前記駆動輪の回転速度を変更させる動力伝達輪位置調整機構とが備えられている点にある。
【0011】
上記特徴構成によれば、駆動輪に設けられた半球状体の球状表面部に、動力伝達輪が接触して回転駆動力が付与されるため、駆動力を簡単な構造によって駆動輪に伝達させることができる。また、交差角度の大きさの変化に応じて動力伝達輪が球状表面部に接触する位置を変更して、駆動輪の回転速度が調整されるので、交差角度の大きさの変化に応じて連続的に回転速度を変更することができ、簡単な構造で駆動輪の無段階の回転速度の変更を可能としてスムーズに管内の形状の変化部を通過することができる。
【0012】
本発明に係る管内移動装置の更なる特徴構成は、
前記動力伝達輪位置調整機構は、前記交差角度の大きさの変化に伴って回転自在な回転体と、前記本体の中心軸に沿う方向における前記半球状体の中心軸周りに回転して前記動力伝達輪が前記球状表面部に接触する位置を変更自在に前記動力伝達輪を支持する動力伝達輪支持体と、前記回転体の回転により前記動力伝達輪が前記球状表面部に接触する位置を変更するように前記回転体の回転と前記動力伝達輪支持体の回転とを連係させる回転連係機構とを備えている点にある。
【0013】
上記特徴構成によれば、交差角度の変化に伴って回転する回転体と、その回転体の回転により、動力伝達輪を支持する動力伝達輪支持体の回転とを連係させる回転連係機構が設けられているので、交差角度の変化により動力伝達輪支持体を回転させることができる。
また、動力伝達輪支持体は、本体の中心軸に沿う方向における半球状体の中心軸周りに回転して動力伝達輪が球状表面部に接触する位置を変更自在に支持しているので、動力伝達輪により駆動力を駆動輪の半球状体に伝えつつ、動力伝達輪が半球状体上を移動して駆動輪の無段階の回転速度の変更を可能としている。
【0014】
本発明に係る管内移動装置の更なる特徴構成は、
前記アーム部は、前記本体に揺動自在に接続された第1アームと、当該第1アームに揺動自在に接続されて前記駆動輪が設けられた第2アームとで構成され、
前記第1アームは、前記第2アームとの接続部に備えられた接続部材と、当該接続部材と前記本体とに揺動自在に備えられた2本以上の揺動アームと、前記本体とにより構成された平行四辺形のリンク機構を備え、前記接続部材は前記第1直線と平行な第1直線部が設けられ、前記第2アームは、前記第2直線と平行な第2直線部を備えている点にある。
【0015】
上記特徴構成によれば、第1アームは、第2アームとの接続部材と、接続部材と本体とに揺動自在に備えられた揺動アームと、本体とにより平行四辺形のリンク機構が構成されている。これにより、第2アームと接続部材との相対的な位置関係を保持しつつ第1アームを本体に対して揺動することができる。従って、管内の内径が変化した場合でも、第1アームがその内径の変化に対応するため、直管状の管内においては、第2アームと接続部材との相対的な位置関係が維持されて、駆動輪の回転速度が一定に保たれる。
また、第1アームの接続部材は第1直線を含む第1直線部が設けられ、第2アームは、前記第2直線を含む第2直線部を備えているので、接続部材の第1直線部と第2アームの第2直線部との関係によって交差角度が代表されて駆動輪の回転速度が変化されるため、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状の変化部を通過することができる。さらに、アーム部ごとに第1アームの接続部材に対する第2アームによって交差角度が代表されるので、複数のアーム部の夫々の交差角度によって夫々の駆動輪の回転速度が調整される。従って、管内の形状変化部である曲り部や縮径部などにおいて夫々のアーム部の駆動輪の回転速度が独立されて調整されて、スムーズに管内の形状の変化部を通過することができる。
【0016】
本発明に係る管内移動装置の更なる特徴構成は、
前記第2アームが前記第1アームに対して所定の一方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が速くなり、前記所定の一方向と反対の他方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が遅くなる速度調整機構を備えた点にある。
【0017】
上記特徴構成によれば、第1アームに対する第2アームの相対的な所定の一方向への回転により形成される交差角度によって駆動輪の回転速度を速くすることができ、一方で、他方向への回転により形成される交差角度によって駆動輪の回転速度が遅くすることができる。さらに、交差角度の大きさに応じて駆動輪の回転速度が調節される。これにより、第1アームに対する第2アームの回転方向を速度調整のための調整要素として自在に駆動輪の回転速度を調整することができる。
【0018】
本発明に係る管内移動装置の更なる特徴構成は、
前記複数のアーム部が、前記本体の移動方向の前方側と後方側の夫々に前後一対備えられ、前記第2アームには、その一端部に前記駆動輪が設けられるとともに、他端部に回転自在な従動輪が前記駆動輪よりも前記本体に近接するように設けられ、
前記基準位置関係にある前記第2アームの前記他方向としての前記従動輪が前記本体に近接する方向への回転が規制される回転規制体が備えられた点にある。
【0019】
上記特徴構成によれば、複数のアーム部が、本体の移動方向の前方側と後方側の夫々に前後一対備えられているので、アーム部により本体を管内で安定させて移動させることができる。さらに、第2アームの一端部には駆動輪が設けられるとともに、他端部には従動輪が設けられているので、従動輪の管内壁への接触によって管内の形状の変化部においても安定した接触状態を維持しつつ移動することができる。
また、従動輪が駆動輪よりも本体に近接するように設けられ、基準位置関係にある第2アームの他方向としての従動輪が本体に近接する方向への回転が規制される回転規制体が備えられている。これにより、例えば、管内の曲り部において、曲り部の外側に位置する本体の移動方向の前後一対に備えられた第2アームについては、回転が規制されない方向に回転して、従動輪と駆動輪が管内壁に接触する状態となる。その一方で、曲り部の内側に位置するアーム部の第2アームについては、回転規制体により基準位置関係の位置で回転が規制されることで、従動輪のみが管内壁に接触して、駆動輪を管内壁から離れた状態とすることができる。これにより、曲り部における内側面を通る駆動輪と、外側面を通る駆動輪の距離差を許容しつつ、外側の駆動輪で駆動力を管内壁に与えつつ管内を進むことができる。
また、管内径の縮径部においては、本体の移動方向の前後一対に備えられた前方側のアーム部の第2アームと後方側のアーム部の第2アームでは、第2アームが第1アームに対して形成する交差角度が所定の一方向とその反対側である他方向に回転して形成されるものとなるため、それらの駆動輪において回転速度が異なるものとなるが、後方側のアーム部の第2アームについては、回転規制体により基準位置関係の位置で回転が規制されることで、従動輪のみが管内壁に接触して、駆動輪が管内壁から離れた状態となるため、前方側のアーム部の第2アームの駆動輪の回転速度によって本体がスムーズに移動される。
【0020】
本発明に係る管内移動装置の更なる特徴構成は、
前記付勢手段が前記本体の付勢手段接続部と前記アーム部との間に、前記アーム部が前記付勢手段接続部に向かう押圧力規定方向への引張力を受けるように設けられ、当該引張力によって前記アーム部が前記管内壁の方向へ押圧される押圧力が発生し、前記管内の内径が変化した場合でも、前記押圧力が一定の範囲に維持される点にある。
【0021】
上記特徴構成によれば、付勢手段が本体の付勢手段接続部とアーム部との間に、アーム部が管内壁の方向へ押圧される押圧力を発生させるように設けられているので、本体の周方向で間隔を隔てて配置された複数のアーム部による壁面への押付力によって本体が管内の中心付近の位置に保たれる。また、管内の内径が変化した場合でも、押圧力が一定の範囲に維持されるので、例えば、内径の縮径部における押付力の増加による駆動力の損失や、拡径部における内壁面への押付力の不足をなくして駆動力を適切に内壁面に伝達することができ、スムーズに管内の形状の変化部を通過することができる。
【0022】
本発明に係る管内移動装置の更なる特徴構成は、
前記本体は複数備えられ、本体同士が接続体にて接続されている点にある。
【0023】
上記特徴構成によれば、本体同士を接続体で接続することにより、自由に胴体長を変更することが可能である。この構造にすることで、例えば、接続体の内部において本体の駆動に必要となるバッテリーやその他の必要な機器を積載することが可能となる。
【図面の簡単な説明】
【0024】
【図1】直管状の管内を移動する状態の管内移動装置の斜視図
【図2】直管状の管内を移動する状態の管内移動装置の断面図
【図3】複数の管内移動装置を接続した場合の断面図
【図4】縮径部を移動する管内移動装置の状態を示す断面図
【図5】管内移動装置のアーム部の概略断面図
【図6】付勢手段によるアーム部の管内壁への押圧力を示す図
【図7】アーム部における動力伝達輪位置調整機構を示す図
【図8】基準位置関係におけるアーム部の断面図(a)と正面図(b)
【図9】交差角度をα度としたときのアーム部の断面図(a)と正面図(b)
【図10】曲り部を移動する管内移動装置の状態を示す断面図
【発明を実施するための形態】
【0025】
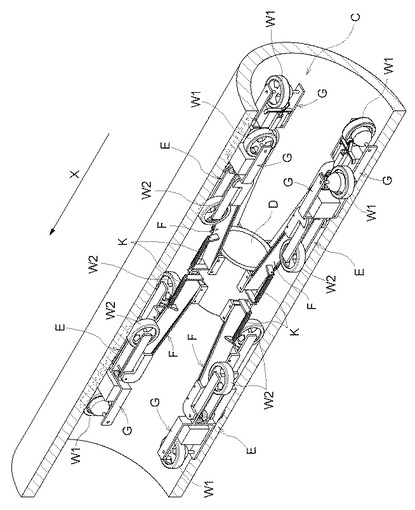
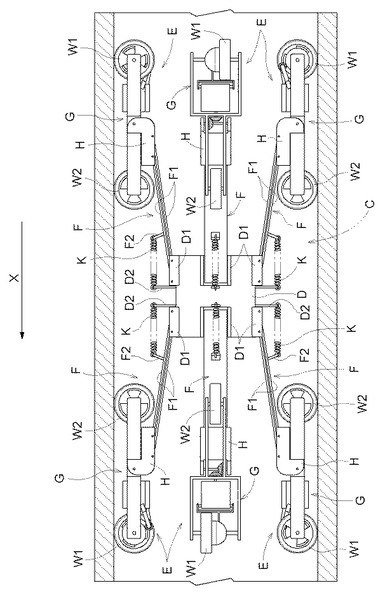
以下、本発明に係る管内移動装置の実施形態を、図面に基づいて説明する。図1は管内移動装置の斜視図であり、図2は管内移動装置の断面図である。また、図3は複数の管内移動装置を接続した場合の断面図である。
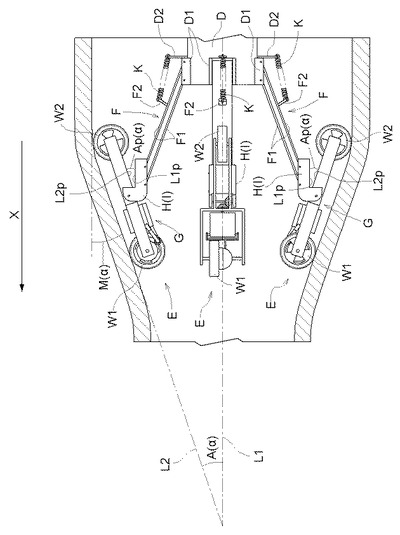
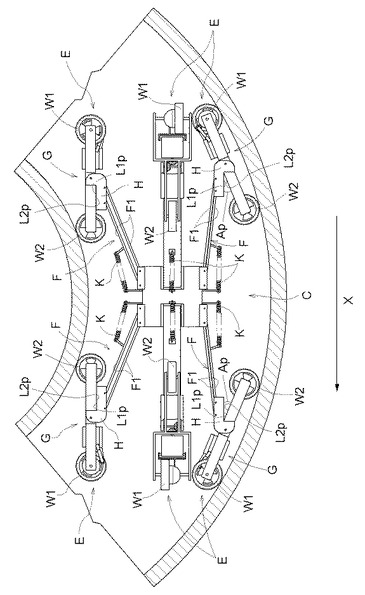
図1および図2に示すように、管内移動装置Cは、円筒状の形状を有する本体Dと本体Dから外側に延設された複数のアーム部Eを備えている。複数のアーム部Eは、本体Dの移動方向Xの前方側と後方側の夫々に前後一対となる状態で、本体Dの周方向に均等4方向に放射状に配置され、本体Dの前方側に4本と後方側に4本の合計8本のアーム部Eが設けられている。
また、アーム部Eは、それぞれ本体Dに揺動自在に接続された第1アームFと、第1アームFに揺動自在に接続された第2アームGとで構成されている。第2アームGには、その一端部に駆動力を有する駆動輪W1が設けられるとともに、他端部に回転自在で駆動力を有さない従動輪W2が駆動輪W1よりも本体Dから近接するように設けられている。また、第1アームFには、駆動輪W1および従動輪W2を管内壁に押圧するように第1アームFを付勢する付勢手段Kが備えられている。
【0026】
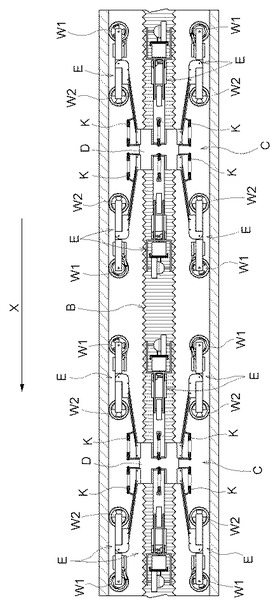
また、図3に示すように、複数の本体Dが配管内を移動する際には、本体D同士が接続体Bにて接続される。例えば、本体D同士を中空のベローズ状の接続体Bで接続することにより、自由に接続体Bの長さを変更することが可能であり、駆動輪W1の駆動用のバッテリーやその他の必要な機器を搭載するための積載容量を自由に変更することができる。
【0027】
図2および図4に示すように、第1アームFは、第2アームGと接続される接続部材Hと、本体Dの外周部の第2アーム取付部D1と、接続部材Hと第2アーム取付部D1との間に揺動自在に備えられた2本の揺動アームF1とにより構成された平行四辺形のリンク機構(平行四点リンク)を有している。これにより、第2アームGと接続部材Hとの相対的な位置関係を維持したまま、第1アームFを本体Dに対して揺動させることができる。
【0028】
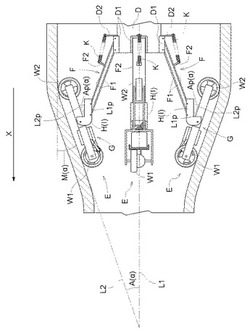
図4に示すように、駆動輪W1の回転速度の調節は、本体Dの中心軸に沿って本体Dの移動方向Xに延びる第1直線L1に対して、駆動輪W1が管内壁に接触する接触点を通りその接線方向に延びる第2直線L2が交差する交差角度Aの大きさの変化に伴って駆動輪W1の回転速度を変更させる速度調整機構によってなされている。
また、管内移動装置Cの第1アームFの接続部材Hには、交差角度Aを形成する第1直線L1と平行な第1直線部L1pが設けられ、一方、第2アームGには、第2直線L2と平行な第2直線部L2pが備えられている。例えば、第1直線部L1pは、接続部材Hの内壁面に向かう面と揺動アームF1が接続されている側面とで形成される直線状のエッジ部とされ、第2直線部L2pは、第2アームGが接続部材Hに接触する面と従動輪W2の回転軸を保持している側面とで形成される直線状のエッジ部とされる。
従って、第1アームFに対して第2アームGが揺動することで、第1アームFの第1直線部L1pと第2アームGの第2直線部L2pとで形成されるアーム交差角度Apは交差角度Aと同じ角度となる。本実施形態に係る管内移動装置Cでは、そのアーム交差角度Ap(交差角度に相当)の大きさの変化に伴って駆動輪W1の回転速度が変更するように構成されている。
【0029】
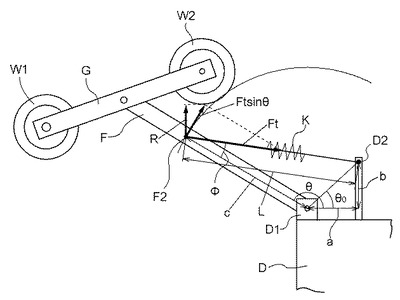
以下、付勢手段Kについて説明する。図4および図5に示すように、付勢手段Kは、本体Dの付勢手段接続部D2と本体Dの中心側に位置する揺動アームF1の付勢手段取付部F2との間に設けられ、第1アームFが付勢手段接続部D2に向かう押圧力規定方向への引張力Ftを受けるように設けられ、この引張力Ftによって第1アームFが管内壁の方向へ押圧される押圧力Rが発生する。これにより、管内の内径が変化した場合でも、押圧力Rが一定の範囲に維持される。
【0030】
図5に示すように、付勢手段Kは本体Dの付勢手段接続部D2と第1アームFの付勢手段取付部F2との間において引張力Ftを発生するバネで構成されており、第1アームFが管内の壁面に垂直な方向へ押圧される押圧力Rを生み出す機構としている。ここで、θは本体Dと第1アームFとで形成される角度である。バネ長Lは余弦定理より、下記数式(1)のように表される。
L2=a2+b2+c2−2c・SQRT(a2+b2)・cos(θ−θ0)・・(1)
【0031】
そして、付勢手段Kのバネ定数をk、自然長をL0とすると、Ft=k(L−L0)と求められる。ここで正弦定理より、下記数式(2)が求められる。
L/sin(θ−θ0)=SQRT(a2+b2)/sinφ
sinφ=(SQRT(a2+b2)/L)・sin(θ−θ0)・・・(2)
【0032】
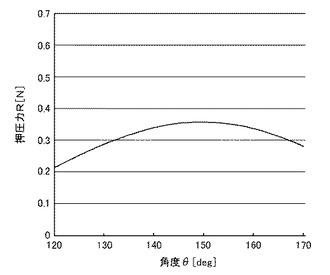
従って、壁面への押圧力Rは、R=Fsinφcos(π−θ)として求めることができる。ここで、バネ定数kと自然長L0を適切に選択して、図5において、第2アーム取付部D1から付勢手段接続部D2までの押圧力Rの方向に直交する距離aを0.3c、付勢手段接続部D2における押圧力R方向の距離bを0.1cとしたときの押圧力Rの値を図6に示す。これにより、管内径が変化しても、図6に示されたような本体Dと第1アームFとで形成される角度θの範囲では、押圧力Rが一定の範囲に維持されることがわかる。
【0033】
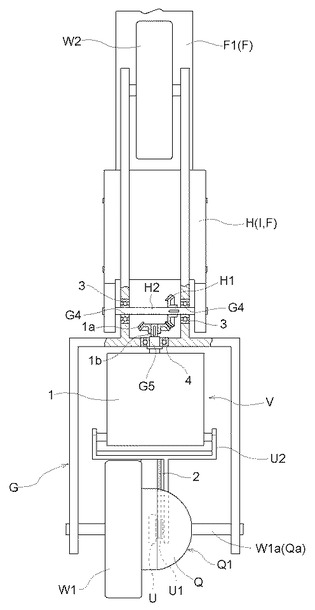
次に、速度調整機構について説明する。図7に示すように、速度調整機構は、駆動輪W1に設けられた半球状体Qと、半球状体Qの球状表面部Q1に接触して回転駆動力を駆動輪W1に伝達する動力伝達輪Uと、アーム交差角度Apの大きさの変化に応じて動力伝達輪Uが球状表面部Q1に接触する位置を変更して、駆動輪W1の回転速度を変更させる動力伝達輪位置調整機構Vとで構成されている。そして、動力伝達輪Uが半球状体Qの球状表面部Q1に接触しつつ動力伝達輪位置調整機構Vによって、その接触位置が変更されて駆動輪W1の回転速度が調節される。
【0034】
また、半球状体Qの回転軸Qaは駆動輪W1の回転軸W1aと同一とされて、半球状体Qの直径は駆動輪W1の直径より小さく形成されて、駆動輪W1に固定された状態で形成される。ここで、動力伝達輪Uは、第2アーム部のモータケース1に収容されたモータの駆動力を駆動力伝達ベルト2によって伝達可能な動力伝達プーリーU1を備えて構成されている。駆動力伝達ベルト2の材質は、動力伝達プーリーU1を構成する部材との関係で摩擦係数の高いゴムなどの材質で構成されている。同様に、動力伝達輪Uの半球状体Qと接触して動力を伝達する動力伝達輪Uの外周部においても、モータからの駆動力を損失なく半球状体Qに使えるために、半球状体Qを構成する部材との関係で摩擦係数の高いゴムなどの材質で構成されている。
【0035】
次に、速度調整機構を構成する動力伝達輪位置調整機構Vについて説明する。動力伝達輪位置調整機構Vはアーム交差角度Apの大きさの変化に応じて、駆動輪W1の回転速度を変更させる機構である。つまり、図9に示すように第1アームFに対して第2アームGが揺動することにより発生するアーム交差角度Apの大きさの変化によって、駆動輪W1の回転速度を変更させる機構である。
【0036】
第1アームFの接続部材Hには、第1アーム側傘歯車H1、第1アーム側傘歯車軸H2が互いに固定されて接続部材Hと一体的に構成されている。そして、第2アームGの軸孔G4に第1アーム側傘歯車軸H2がベアリング3によって回転可能に貫通されて設けられ、これにより、第1アームFの接続部材Hに対して第2アームGが回転可能となっている。一方で、第2アームGに設けられている駆動力を発生するモータが収容されたモータケース1、第2アーム側傘歯車1a(回転体に相当)、モータケース接続軸1bは互いに固定されて一体的に構成されている。そして、第2アームGの接続軸孔G5にモータケース接続軸1bがベアリング4によって回転可能に貫通されて設けられ、これにより、第2アームGにおいてモータケース1が回転可能となっている。さらに、モータケース1は、動力伝達輪Uを支持している動力伝達輪支持体U2と接続されている。動力伝達輪支持体U2は、図8および図9に示すようにモータケース1に揺動可能に取り付けられ、モータケース1内に収容された図示しない付勢手段によって動力伝達輪Uを球状表面部Q1に押付けるように付勢している。また、動力伝達輪支持体U2は、駆動輪W1に設けられた半球状体Qの本体Dの中心軸に沿う方向における中心軸周りに回転して、動力伝達輪Uを球状表面部Q1に押付けて接触させつつ球状表面部Q1上での位置変更を可能となるように支持している。
【0037】
また、第1アームFと第2アームGの接続部において、第1アーム側傘歯車H1が第2アーム側傘歯車1a(回転体に相当)と噛合するように設けられている。また、第2アームGには、第2アーム側傘歯車1a(回転体に相当)が回転することで、モータケース1を介して動力伝達輪支持体U2が回転する回転連係機構が備えられている。
【0038】
そして、図9に示すように、動力伝達輪支持体U2によって支持されている動力伝達輪Uの球状表面部Q1における移動角度Pはアーム交差角度Apと同じ角度になるように構成されている。これにより、移動角度P、アーム交差角度Ap、交差角度Aは実質的に同じ角度となる。従って、これらの機構が含まれる動力伝達輪位置調整機構Vにより、第1アームFに対する第2アームGの回転動作を、動力伝達輪支持体U2の回転動作に連携して、動力伝達輪支持体U2が支持する動力伝達輪Uが半球状体Q上を接触しつつ移動して、駆動輪W1の回転速度が調節される。
【0039】
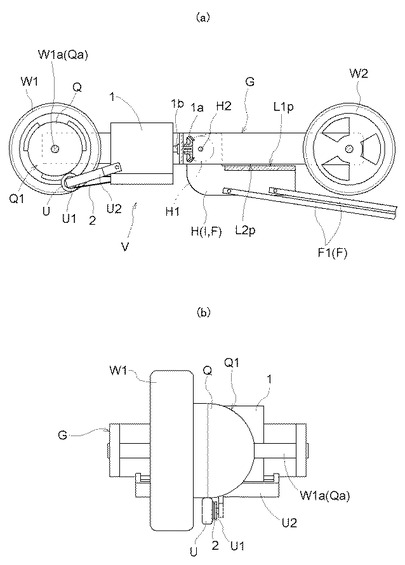
また、速度調整機構は、本体Dが直管状の管内を移動する状態における第1直線L1と第2直線L2との相対的な位置関係である基準位置関係Tに基づいて駆動輪W1の回転速度を増速又は減速させる。
本実施形態においては、本体Dが直管状の管内を移動する状態(図1〜図3参照)における基準位置関係Tは図8(a)に示すような第1アームFに対する第2アームGの位置関係となる。つまり、第1アームFの接続部材Hに含まれる第1直線部L1pと、第2アームGに含まれる第2直線部L2pが平行となる位置関係となる。この状態においては、動力伝達輪Uは図8(b)に示すように半球状体Qの回転軸Qaと直交する方向に位置するように構成されている。
【0040】
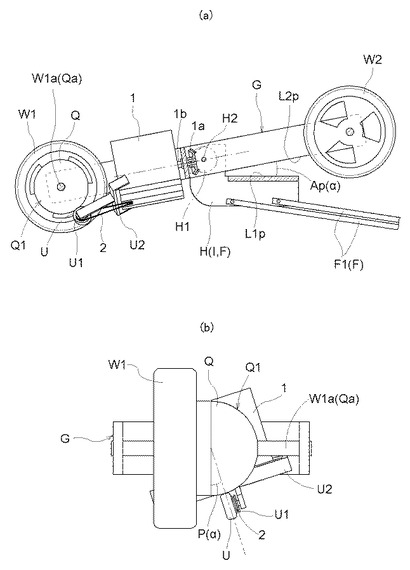
そして、図9(a)に示すように、第2アームGが第2アームGの第2直線部L2pが第1アームFの第1直線部L1pから離れる方向である所定の一方向へ回転(図9(a)中左回転)して形成されるアーム交差角度Apの大きさに応じて動力伝達輪位置調整機構Vにより動力伝達輪Uが球状表面部Q1に接触しつつ半球状体Qの回転軸Qaに近づく方向へと回転移動する(図9(b)中左回転)。そうすると、動力伝達輪Uが半球状体Qを一周させるに要する距離が短くなるので、モータによって駆動される動力伝達輪Uの回転速度を一定とした場合、半球状体Qの回転速度、すなわち駆動輪W1の回転速度が速くなる。一方で、第2アームGが所定の一方向と反対の他方向(図9(a)中右回転)へ回転すると、動力伝達輪Uは半球状体Qの回転軸Qaから離れる方向へと回転移動(図9(b)中左回転)して、駆動輪W1の回転速度が遅くなる。
【0041】
また、第2アームGには、基準位置関係Tにある第2アームGの他方向への回転であって従動輪W2が本体Dに近接する方向への回転が規制される回転規制体Iが備えられる。本実施形態においては、第1アームFの接続部材Hが回転規制体Iとしての役割を兼ねている。これにより、本体Dが直管状の管内を移動するときの基準位置関係Tにある駆動輪W1の回転速度を最も遅い回転速度として、管内の形状が変化する曲り部や縮径部において駆動輪W1の回転速度を増加させて、本体Dの進行方向の速度を一定に維持しつつ管内を移動することができる。
【0042】
そして、上述の速度調整機構によって、アーム交差角度Apに対して駆動輪W1の回転速度が、以下のように調節される。ここで、動力伝達輪Uと半球状体Qの接触部における速度をVm、基準位置関係Tでの駆動輪W1の回転速度および角速度をそれぞれVw0、ωw0とし、アーム交差角度Apをα度としたときの駆動輪W1の回転速度および角速度をそれぞれVw、ωwとし、駆動輪W1の半径をrとすると、動力伝達輪Uの回転速度を一定すなわちVm=constとした場合、下記数式(3)および数式(4)が求められる。
ωw0=Vm/r・・・(3)
ωw=Vm/(r・cosα)・・・(4)
【0043】
ここで、Vw0=rw・ωw0、Vw=rw・ωwであるので、下記数式(5)が求められる。
Vw/Vw0=1/cosα・・・(5)
【0044】
従って上記の数式(5)によって、アーム交差角度Apより駆動輪W1の回転速度が変化するように構成されている。これによって、後述するように管内の形状変化部をスムーズに通過することができる。
【0045】
図4に示したのは、管内移動装置Cが管内径の縮径部に差し掛かったときの状態の一例である。直管状の管内の内壁面に対する傾斜壁面の傾きの角度である傾斜角度Mをα度とした縮径部の傾斜壁面の走行距離は、管内を移動方向Xに同じ距離だけ進む場合において、直管状の管内壁よりも傾斜している分だけ長くなり、直管状の管内壁の(1/cosα)倍の走行距離となる。従って、直管状の管内を走行中の管内移動装置Cが、その移動方向Xの速度を保ちつつ滑らかに縮径部を通過するためには、その傾斜壁面を走行する駆動輪W1の速度は、直管状の管内壁を走行する駆動輪W1の速度と比較して(1/cosα)倍とする必要がある。これに対して、本実施形態に係る管内移動装置Cは、このような傾斜角度Mをα度とする縮径部において、第2アームGが縮径部の傾斜壁面の傾斜角度Mに対応して回転してα度のアーム交差角度Apを形成する。そのときのアーム部Eは図9(a)および図9(b)に示される状態となっており、図9(b)に示す動力伝達輪Uの球状表面部Q1における移動角度Pにおいてもアーム交差角度Apと同じα度を形成する。従って、上記の数式(5)からも明らかなように、駆動輪W1の速度が(1/cosα)に調節されるため、その移動方向Xの速度を維持しつつ滑らかに縮径部を通過することができる。なお、傾斜角度M、移動角度P、アーム交差角度Apおよび交差角度Aは実質的に同一であり、α度となっている。
【0046】
また、管内径の縮径部においては、本体Dの移動方向Xの前後一対に備えられた前方側のアーム部Eの第2アームGと後方側のアーム部Eの第2アームGでは、第2アームGが第1アームFに対して形成するアーム交差角度Apが所定の一方向とその反対側である他方向に回転して形成されるものとなるため、それらの駆動輪W1において回転速度が異なるものとなるが、後方側のアーム部Eの第2アームGについては、回転規制体Iにより基準位置関係Tの位置で回転が規制されることで、従動輪W2のみが管内壁に接触して、駆動輪W1が管内壁から離れた状態となるため、管内壁に接触する前方側のアーム部Eの第2アームGの駆動輪W1の回転速度によって本体Dが滑らかに縮径部を通過することができる。
【0047】
図10に示すのは、管内移動装置Cが管内の曲り部に差し掛かったときの状態の一例である。管内移動装置Cは曲り部を通過する際、曲り部の外側(図10中の管内下側)に位置する本体Dの移動方向Xの前後一対に備えられたアーム部Eの第2アームGについては、回転が規制されていない方向に回転して、駆動輪W1と従動輪W2が管内壁に接触する状態となる。その一方で、曲り部の内側(図10中の管内上側)に位置するアーム部Eの第2アームGについては、回転規制体Iにより基準位置関係Tの位置でその回転が規制されているので、図10のように従動輪W2のみが管内壁に接触して、駆動輪W1が管内壁から離れた状態となる。このように、曲り部の内側内壁面に接触する駆動輪W1と、外側内壁面に接触する駆動輪W1との距離差を、内側内壁面に接触する駆動輪W1を管内壁から離れた状態とすることで許容しつつ、外側内壁面に接触する駆動輪W1で駆動力を内壁面に与えつつ管内を進むことができる。また、曲り部の外側に位置するアーム部Eの第2アームGについては、回転が規制されていない一方向に回転してアーム交差角度Apを形成するため、速度調整手段によって駆動輪W1の速度が速くなるように調節される。これにより、管内の曲り部においても、移動速度を維持しつつ滑らかに通過することができる。
【0048】
〔別実施形態〕
(A)上記実施形態においては、複数のアーム部Eを本体Dの移動方向Xの前方側と後方側の夫々に前後一対となる状態で設けたが、これに限らず、複数のアーム部Eを本体Dの移動方向Xの前方側又は後方側のどちらかに設けるものとしてもよい。
【0049】
(B)上記実施形態においては、複数のアーム部Eを本体Dの移動方向Xの前方側と後方側の夫々に前後一対となる状態で、4対のアーム部Eが本体Dの周方向に互いに等間隔となるように配置されたが、これに限らず、2対または3対、あるいは5対以上のアーム部Eを本体Dの周方向に互いに等間隔となるように設けてもよい。
【0050】
(C)上記実施形態においては、アーム部Eは、第1アームFと第2アームGとで構成されたが、これに限らず、アーム部Eが第1アームFのみで構成されていてもよい。
【0051】
(D)上記実施形態においては、アーム部Eに駆動輪W1と従動輪W2が設けられたが、これに限らず、駆動輪W1のみが設けられていてもよい。
【0052】
(E)上記実施形態においては、第1アーム側傘歯車H1および第2アーム側傘歯車1aによって第1アームFの接続部材Hに対する第2アームGの回転を動力伝達輪支持体U2に伝達したが、これに限らず、ユニバーサルジョイントなどを用いて、第1アームFの接続部材Hに対する第2アームGの回転を動力伝達輪支持体U2に伝達してもよい。
【産業上の利用可能性】
【0053】
以上説明したように、異なる管径に適用可能であり、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状変化部を通過することができる管内移動装置を提供することができる。
【符号の説明】
【0054】
1a 第2アーム側傘歯車(回転体)
A 交差角度
B 接続体
C 管内移動装置
D 本体
D2 付勢手段接続部
E アーム部
F 第1アーム
F1 揺動アーム
Ft 引張力
G 第2アーム
H 接続部材
K 付勢手段
L1 第1直線
L1p 第1直線部
L2 第2直線
L2p 第2直線部
Q 半球状体
Q1 球状表面部
R 押圧力
T 基準位置関係
U 動力伝達輪
U2 動力伝達輪支持体
V 動力伝達輪位置調整機構
W1 駆動輪
W2 従動輪
【技術分野】
【0001】
本発明は、本体とその本体から外側に延設された複数のアーム部を備え、前記複数のアーム部は、前記本体の周方向に分散して配置されており、前記複数のアーム部の夫々は、その先端部に管内壁に接触して回転駆動自在な駆動輪が支持され、その基端部が前記本体に揺動自在に接続され、前記駆動輪を管内壁に押圧する側に前記アーム部を付勢する付勢手段が備えられている管内移動装置に関する。
【背景技術】
【0002】
地下に埋設されているガス配管の検査は、地面を掘削し配管を露出して検査を行うことができるが、その配管の量が膨大であることや、建造物の地下など人の進入が困難な場所に埋設されている配管も多く存在することなどから、それらの作業は容易ではない。また、埋設配管を露出する際の経済的コスト、検査効率など、対象配管上の地面全体を掘削する手法には多くの面で課題が残されている。そこで、地面を掘削せずに配管検査を実施するために管内移動装置が必要となっている。
【0003】
従来の管内移動装置として、例えば、特許文献1には、複数のユニットが屈曲可能に連結体によって連結された管内移動装置が開示されており、管内移動装置の前端及び後端のユニットには、周方向の均等4方向に放射状の配置で、管内面に接する少なくとも一対の駆動輪と一対の従動輪を備えており、その駆動輪には走行モータと、その駆動輪の走行方向を転換する操舵モータが附属されている。
また、前端及び後端以外のユニットには、周方向の均等4方向に放射状の配置で、管内面に接する従動輪が備えられている。駆動輪の支持部には、配管の製作誤差や変形、或いは異物の付着等に原因する管内径の変化を吸収して安定な走行を円滑に行うための復元バネを装着したサスペンション機構が設けられ、従動輪の支持部には、従動輪を管壁へ押し付けるためにバネ等による弾性的なサスペンション機構が設けられている。
そして、前端及び後端のユニットに設けられた駆動輪の走行制御及び駆動輪の操舵制御は、当該ロボットとケーブルで接続された管外のコントローラを通じて行われている。これにより、管内移動装置の構造が簡単で、走行動作も単純にすることができるとされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−52282号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、管内移動装置が送り込まれる配管の内部は一様な形状とは限らない。例えば、配管の途中にはレジューサが設置されて配管の内径が大きく変化している縮径部や、エルボなどが設置された曲が部もある。
例えば、特許文献1に記載の管内移動装置の場合、管内移動装置のユニットには、
駆動輪および従動輪を支持部には、配管の製作誤差などを許容するサスペンション機構が設けられているにとどまり、配管の内径が変化するレジューサなどの縮径部を通過することはできない。また、エルボなどの曲り部では、その曲る方向に管内移動装置の回転可能な方向を合わせることで通過することができるとも考えられるが、先端および後端のユニットに備えられた一対の駆動輪において、駆動輪ごとに回転速度制御を行なう機構を有さず、エルボ通過時に発生する、エルボの内側と外側の移動距離の違いを一対の駆動輪において調整することができずにスムーズにエルボなどの曲り部を通過することも困難となる。
【0006】
本発明は、かかる事情に鑑みてなされたものであり、その目的は、異なる管径に適用可能であり、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状変化部を通過することができる管内移動装置を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明に係る管内移動装置は、
本体とその本体から外側に延設された複数のアーム部を備え、前記複数のアーム部は、前記本体の周方向に分散して配置されており、前記複数のアーム部の夫々は、その先端部に管内壁に接触して回転駆動自在な駆動輪が支持され、その基端部が前記本体に揺動自在に接続され、前記駆動輪を前記管内壁に押圧する側に前記アーム部を付勢する付勢手段が備えられている管内移動装置であって、
その特徴構成は、前記本体の中心軸に沿って前記本体の移動方向に延びる第1直線に対して、前記駆動輪が前記管内壁に接触する接触点を通りその接線方向に延びる第2直線が交差する場合に、前記第1直線に対する前記第2直線の交差により形成される交差角度の大きさの変化に伴って前記駆動輪の回転速度を変更させる速度調整機構を備え、
前記速度調整機構は、前記本体が直管状の管内を移動する状態における前記第1直線と前記第2直線との相対的な位置関係である基準位置関係に基づいて前記駆動輪の回転速度を増速又は減速させる点にある。
【0008】
上記特徴構成によれば、本体から外側に延設された複数のアーム部は、本体の周方向に分散して配置されて、その先端部に管内壁に接触する駆動輪が支持されている。これにより、複数のアーム部は、管内壁に駆動輪を接触した状態で本体を管内の中心側に位置させることができる。また、アーム部は本体に揺動自在に接続され、駆動輪を管内壁に押圧する側に付勢する付勢手段がアーム部に備えられているので、駆動輪の駆動力を確実に管内壁に伝えることができる。
そして、本体の中心軸に沿って本体の移動方向に延びる第1直線に対して、駆動輪が管内壁に接触する接触点を通りその接線方向に延びる第2直線が交差する交差角度の大きさの変化に伴って駆動輪の回転速度を変更させる速度調整機構を備えるので、管内の形状変化部である曲り部や縮径部などにおいて、本体の移動方向に対する駆動輪の管内壁の接線方向の変化に対応して、駆動輪の回転速度を変更することができる。さらに、複数のアーム部ごとに交差角度が代表されるので、夫々のアーム部の駆動輪の回転速度が調整される。従って、管内の形状変化部である曲り部や縮径部などにおいて夫々のアーム部の駆動輪の回転速度が独立して調整されて、管内の形状の変化に対応することができる。
【0009】
また、本体が直管状の管内を移動する状態における第1直線と第2直線との相対的な位置関係である基準位置関係を基準として、駆動輪の回転速度を増速又は減速させるため、直管状の管内を移動する状態である基準位置関係における駆動輪の回転速度を基準として、管内の形状の変化部である曲り部や縮径部などにおける交差角度の大きさの変化に伴って駆動輪の回転速度を変更して決定することができる。例えば、縮径部においては、管内を管内移動装置が移動方向に一定距離だけ移動する場合、縮径部の傾斜壁面の駆動輪の走行距離は直管状の管内壁よりも傾斜している分だけ長くなる。この場合、管内移動装置が移動方向の速度を保ちつつ縮径部を通過するためには、その傾斜壁面を移動する駆動輪の回転速度を直管状の管内壁を移動する場合より速くする必要がある。
ここで、縮径部において駆動輪が傾斜壁面と接触して交差角度が変化し、この交差角度の変化によって駆動輪の回転速度を、直管状の管内壁を移動する状態の基準位置関係における駆動輪の回転速度より速くすることができ、上述の如く、管内移動装置がその移動方向の速度を維持しつつ滑らかに縮径部を通過することができる。
このように、管内の形状の変化部に対応して受動的な速度調整を可能としてスムーズに形状変化部を通過することができる。
【0010】
本発明に係る管内移動装置の更なる特徴構成は、前記速度調整機構は、前記駆動輪に設けられた半球状体と、前記半球状体の球状表面部に接触して回転駆動力を前記駆動輪に伝達する動力伝達輪と、前記交差角度の大きさの変化に応じて前記動力伝達輪が前記球状表面部に接触する位置を変更して、前記駆動輪の回転速度を変更させる動力伝達輪位置調整機構とが備えられている点にある。
【0011】
上記特徴構成によれば、駆動輪に設けられた半球状体の球状表面部に、動力伝達輪が接触して回転駆動力が付与されるため、駆動力を簡単な構造によって駆動輪に伝達させることができる。また、交差角度の大きさの変化に応じて動力伝達輪が球状表面部に接触する位置を変更して、駆動輪の回転速度が調整されるので、交差角度の大きさの変化に応じて連続的に回転速度を変更することができ、簡単な構造で駆動輪の無段階の回転速度の変更を可能としてスムーズに管内の形状の変化部を通過することができる。
【0012】
本発明に係る管内移動装置の更なる特徴構成は、
前記動力伝達輪位置調整機構は、前記交差角度の大きさの変化に伴って回転自在な回転体と、前記本体の中心軸に沿う方向における前記半球状体の中心軸周りに回転して前記動力伝達輪が前記球状表面部に接触する位置を変更自在に前記動力伝達輪を支持する動力伝達輪支持体と、前記回転体の回転により前記動力伝達輪が前記球状表面部に接触する位置を変更するように前記回転体の回転と前記動力伝達輪支持体の回転とを連係させる回転連係機構とを備えている点にある。
【0013】
上記特徴構成によれば、交差角度の変化に伴って回転する回転体と、その回転体の回転により、動力伝達輪を支持する動力伝達輪支持体の回転とを連係させる回転連係機構が設けられているので、交差角度の変化により動力伝達輪支持体を回転させることができる。
また、動力伝達輪支持体は、本体の中心軸に沿う方向における半球状体の中心軸周りに回転して動力伝達輪が球状表面部に接触する位置を変更自在に支持しているので、動力伝達輪により駆動力を駆動輪の半球状体に伝えつつ、動力伝達輪が半球状体上を移動して駆動輪の無段階の回転速度の変更を可能としている。
【0014】
本発明に係る管内移動装置の更なる特徴構成は、
前記アーム部は、前記本体に揺動自在に接続された第1アームと、当該第1アームに揺動自在に接続されて前記駆動輪が設けられた第2アームとで構成され、
前記第1アームは、前記第2アームとの接続部に備えられた接続部材と、当該接続部材と前記本体とに揺動自在に備えられた2本以上の揺動アームと、前記本体とにより構成された平行四辺形のリンク機構を備え、前記接続部材は前記第1直線と平行な第1直線部が設けられ、前記第2アームは、前記第2直線と平行な第2直線部を備えている点にある。
【0015】
上記特徴構成によれば、第1アームは、第2アームとの接続部材と、接続部材と本体とに揺動自在に備えられた揺動アームと、本体とにより平行四辺形のリンク機構が構成されている。これにより、第2アームと接続部材との相対的な位置関係を保持しつつ第1アームを本体に対して揺動することができる。従って、管内の内径が変化した場合でも、第1アームがその内径の変化に対応するため、直管状の管内においては、第2アームと接続部材との相対的な位置関係が維持されて、駆動輪の回転速度が一定に保たれる。
また、第1アームの接続部材は第1直線を含む第1直線部が設けられ、第2アームは、前記第2直線を含む第2直線部を備えているので、接続部材の第1直線部と第2アームの第2直線部との関係によって交差角度が代表されて駆動輪の回転速度が変化されるため、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状の変化部を通過することができる。さらに、アーム部ごとに第1アームの接続部材に対する第2アームによって交差角度が代表されるので、複数のアーム部の夫々の交差角度によって夫々の駆動輪の回転速度が調整される。従って、管内の形状変化部である曲り部や縮径部などにおいて夫々のアーム部の駆動輪の回転速度が独立されて調整されて、スムーズに管内の形状の変化部を通過することができる。
【0016】
本発明に係る管内移動装置の更なる特徴構成は、
前記第2アームが前記第1アームに対して所定の一方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が速くなり、前記所定の一方向と反対の他方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が遅くなる速度調整機構を備えた点にある。
【0017】
上記特徴構成によれば、第1アームに対する第2アームの相対的な所定の一方向への回転により形成される交差角度によって駆動輪の回転速度を速くすることができ、一方で、他方向への回転により形成される交差角度によって駆動輪の回転速度が遅くすることができる。さらに、交差角度の大きさに応じて駆動輪の回転速度が調節される。これにより、第1アームに対する第2アームの回転方向を速度調整のための調整要素として自在に駆動輪の回転速度を調整することができる。
【0018】
本発明に係る管内移動装置の更なる特徴構成は、
前記複数のアーム部が、前記本体の移動方向の前方側と後方側の夫々に前後一対備えられ、前記第2アームには、その一端部に前記駆動輪が設けられるとともに、他端部に回転自在な従動輪が前記駆動輪よりも前記本体に近接するように設けられ、
前記基準位置関係にある前記第2アームの前記他方向としての前記従動輪が前記本体に近接する方向への回転が規制される回転規制体が備えられた点にある。
【0019】
上記特徴構成によれば、複数のアーム部が、本体の移動方向の前方側と後方側の夫々に前後一対備えられているので、アーム部により本体を管内で安定させて移動させることができる。さらに、第2アームの一端部には駆動輪が設けられるとともに、他端部には従動輪が設けられているので、従動輪の管内壁への接触によって管内の形状の変化部においても安定した接触状態を維持しつつ移動することができる。
また、従動輪が駆動輪よりも本体に近接するように設けられ、基準位置関係にある第2アームの他方向としての従動輪が本体に近接する方向への回転が規制される回転規制体が備えられている。これにより、例えば、管内の曲り部において、曲り部の外側に位置する本体の移動方向の前後一対に備えられた第2アームについては、回転が規制されない方向に回転して、従動輪と駆動輪が管内壁に接触する状態となる。その一方で、曲り部の内側に位置するアーム部の第2アームについては、回転規制体により基準位置関係の位置で回転が規制されることで、従動輪のみが管内壁に接触して、駆動輪を管内壁から離れた状態とすることができる。これにより、曲り部における内側面を通る駆動輪と、外側面を通る駆動輪の距離差を許容しつつ、外側の駆動輪で駆動力を管内壁に与えつつ管内を進むことができる。
また、管内径の縮径部においては、本体の移動方向の前後一対に備えられた前方側のアーム部の第2アームと後方側のアーム部の第2アームでは、第2アームが第1アームに対して形成する交差角度が所定の一方向とその反対側である他方向に回転して形成されるものとなるため、それらの駆動輪において回転速度が異なるものとなるが、後方側のアーム部の第2アームについては、回転規制体により基準位置関係の位置で回転が規制されることで、従動輪のみが管内壁に接触して、駆動輪が管内壁から離れた状態となるため、前方側のアーム部の第2アームの駆動輪の回転速度によって本体がスムーズに移動される。
【0020】
本発明に係る管内移動装置の更なる特徴構成は、
前記付勢手段が前記本体の付勢手段接続部と前記アーム部との間に、前記アーム部が前記付勢手段接続部に向かう押圧力規定方向への引張力を受けるように設けられ、当該引張力によって前記アーム部が前記管内壁の方向へ押圧される押圧力が発生し、前記管内の内径が変化した場合でも、前記押圧力が一定の範囲に維持される点にある。
【0021】
上記特徴構成によれば、付勢手段が本体の付勢手段接続部とアーム部との間に、アーム部が管内壁の方向へ押圧される押圧力を発生させるように設けられているので、本体の周方向で間隔を隔てて配置された複数のアーム部による壁面への押付力によって本体が管内の中心付近の位置に保たれる。また、管内の内径が変化した場合でも、押圧力が一定の範囲に維持されるので、例えば、内径の縮径部における押付力の増加による駆動力の損失や、拡径部における内壁面への押付力の不足をなくして駆動力を適切に内壁面に伝達することができ、スムーズに管内の形状の変化部を通過することができる。
【0022】
本発明に係る管内移動装置の更なる特徴構成は、
前記本体は複数備えられ、本体同士が接続体にて接続されている点にある。
【0023】
上記特徴構成によれば、本体同士を接続体で接続することにより、自由に胴体長を変更することが可能である。この構造にすることで、例えば、接続体の内部において本体の駆動に必要となるバッテリーやその他の必要な機器を積載することが可能となる。
【図面の簡単な説明】
【0024】
【図1】直管状の管内を移動する状態の管内移動装置の斜視図
【図2】直管状の管内を移動する状態の管内移動装置の断面図
【図3】複数の管内移動装置を接続した場合の断面図
【図4】縮径部を移動する管内移動装置の状態を示す断面図
【図5】管内移動装置のアーム部の概略断面図
【図6】付勢手段によるアーム部の管内壁への押圧力を示す図
【図7】アーム部における動力伝達輪位置調整機構を示す図
【図8】基準位置関係におけるアーム部の断面図(a)と正面図(b)
【図9】交差角度をα度としたときのアーム部の断面図(a)と正面図(b)
【図10】曲り部を移動する管内移動装置の状態を示す断面図
【発明を実施するための形態】
【0025】
以下、本発明に係る管内移動装置の実施形態を、図面に基づいて説明する。図1は管内移動装置の斜視図であり、図2は管内移動装置の断面図である。また、図3は複数の管内移動装置を接続した場合の断面図である。
図1および図2に示すように、管内移動装置Cは、円筒状の形状を有する本体Dと本体Dから外側に延設された複数のアーム部Eを備えている。複数のアーム部Eは、本体Dの移動方向Xの前方側と後方側の夫々に前後一対となる状態で、本体Dの周方向に均等4方向に放射状に配置され、本体Dの前方側に4本と後方側に4本の合計8本のアーム部Eが設けられている。
また、アーム部Eは、それぞれ本体Dに揺動自在に接続された第1アームFと、第1アームFに揺動自在に接続された第2アームGとで構成されている。第2アームGには、その一端部に駆動力を有する駆動輪W1が設けられるとともに、他端部に回転自在で駆動力を有さない従動輪W2が駆動輪W1よりも本体Dから近接するように設けられている。また、第1アームFには、駆動輪W1および従動輪W2を管内壁に押圧するように第1アームFを付勢する付勢手段Kが備えられている。
【0026】
また、図3に示すように、複数の本体Dが配管内を移動する際には、本体D同士が接続体Bにて接続される。例えば、本体D同士を中空のベローズ状の接続体Bで接続することにより、自由に接続体Bの長さを変更することが可能であり、駆動輪W1の駆動用のバッテリーやその他の必要な機器を搭載するための積載容量を自由に変更することができる。
【0027】
図2および図4に示すように、第1アームFは、第2アームGと接続される接続部材Hと、本体Dの外周部の第2アーム取付部D1と、接続部材Hと第2アーム取付部D1との間に揺動自在に備えられた2本の揺動アームF1とにより構成された平行四辺形のリンク機構(平行四点リンク)を有している。これにより、第2アームGと接続部材Hとの相対的な位置関係を維持したまま、第1アームFを本体Dに対して揺動させることができる。
【0028】
図4に示すように、駆動輪W1の回転速度の調節は、本体Dの中心軸に沿って本体Dの移動方向Xに延びる第1直線L1に対して、駆動輪W1が管内壁に接触する接触点を通りその接線方向に延びる第2直線L2が交差する交差角度Aの大きさの変化に伴って駆動輪W1の回転速度を変更させる速度調整機構によってなされている。
また、管内移動装置Cの第1アームFの接続部材Hには、交差角度Aを形成する第1直線L1と平行な第1直線部L1pが設けられ、一方、第2アームGには、第2直線L2と平行な第2直線部L2pが備えられている。例えば、第1直線部L1pは、接続部材Hの内壁面に向かう面と揺動アームF1が接続されている側面とで形成される直線状のエッジ部とされ、第2直線部L2pは、第2アームGが接続部材Hに接触する面と従動輪W2の回転軸を保持している側面とで形成される直線状のエッジ部とされる。
従って、第1アームFに対して第2アームGが揺動することで、第1アームFの第1直線部L1pと第2アームGの第2直線部L2pとで形成されるアーム交差角度Apは交差角度Aと同じ角度となる。本実施形態に係る管内移動装置Cでは、そのアーム交差角度Ap(交差角度に相当)の大きさの変化に伴って駆動輪W1の回転速度が変更するように構成されている。
【0029】
以下、付勢手段Kについて説明する。図4および図5に示すように、付勢手段Kは、本体Dの付勢手段接続部D2と本体Dの中心側に位置する揺動アームF1の付勢手段取付部F2との間に設けられ、第1アームFが付勢手段接続部D2に向かう押圧力規定方向への引張力Ftを受けるように設けられ、この引張力Ftによって第1アームFが管内壁の方向へ押圧される押圧力Rが発生する。これにより、管内の内径が変化した場合でも、押圧力Rが一定の範囲に維持される。
【0030】
図5に示すように、付勢手段Kは本体Dの付勢手段接続部D2と第1アームFの付勢手段取付部F2との間において引張力Ftを発生するバネで構成されており、第1アームFが管内の壁面に垂直な方向へ押圧される押圧力Rを生み出す機構としている。ここで、θは本体Dと第1アームFとで形成される角度である。バネ長Lは余弦定理より、下記数式(1)のように表される。
L2=a2+b2+c2−2c・SQRT(a2+b2)・cos(θ−θ0)・・(1)
【0031】
そして、付勢手段Kのバネ定数をk、自然長をL0とすると、Ft=k(L−L0)と求められる。ここで正弦定理より、下記数式(2)が求められる。
L/sin(θ−θ0)=SQRT(a2+b2)/sinφ
sinφ=(SQRT(a2+b2)/L)・sin(θ−θ0)・・・(2)
【0032】
従って、壁面への押圧力Rは、R=Fsinφcos(π−θ)として求めることができる。ここで、バネ定数kと自然長L0を適切に選択して、図5において、第2アーム取付部D1から付勢手段接続部D2までの押圧力Rの方向に直交する距離aを0.3c、付勢手段接続部D2における押圧力R方向の距離bを0.1cとしたときの押圧力Rの値を図6に示す。これにより、管内径が変化しても、図6に示されたような本体Dと第1アームFとで形成される角度θの範囲では、押圧力Rが一定の範囲に維持されることがわかる。
【0033】
次に、速度調整機構について説明する。図7に示すように、速度調整機構は、駆動輪W1に設けられた半球状体Qと、半球状体Qの球状表面部Q1に接触して回転駆動力を駆動輪W1に伝達する動力伝達輪Uと、アーム交差角度Apの大きさの変化に応じて動力伝達輪Uが球状表面部Q1に接触する位置を変更して、駆動輪W1の回転速度を変更させる動力伝達輪位置調整機構Vとで構成されている。そして、動力伝達輪Uが半球状体Qの球状表面部Q1に接触しつつ動力伝達輪位置調整機構Vによって、その接触位置が変更されて駆動輪W1の回転速度が調節される。
【0034】
また、半球状体Qの回転軸Qaは駆動輪W1の回転軸W1aと同一とされて、半球状体Qの直径は駆動輪W1の直径より小さく形成されて、駆動輪W1に固定された状態で形成される。ここで、動力伝達輪Uは、第2アーム部のモータケース1に収容されたモータの駆動力を駆動力伝達ベルト2によって伝達可能な動力伝達プーリーU1を備えて構成されている。駆動力伝達ベルト2の材質は、動力伝達プーリーU1を構成する部材との関係で摩擦係数の高いゴムなどの材質で構成されている。同様に、動力伝達輪Uの半球状体Qと接触して動力を伝達する動力伝達輪Uの外周部においても、モータからの駆動力を損失なく半球状体Qに使えるために、半球状体Qを構成する部材との関係で摩擦係数の高いゴムなどの材質で構成されている。
【0035】
次に、速度調整機構を構成する動力伝達輪位置調整機構Vについて説明する。動力伝達輪位置調整機構Vはアーム交差角度Apの大きさの変化に応じて、駆動輪W1の回転速度を変更させる機構である。つまり、図9に示すように第1アームFに対して第2アームGが揺動することにより発生するアーム交差角度Apの大きさの変化によって、駆動輪W1の回転速度を変更させる機構である。
【0036】
第1アームFの接続部材Hには、第1アーム側傘歯車H1、第1アーム側傘歯車軸H2が互いに固定されて接続部材Hと一体的に構成されている。そして、第2アームGの軸孔G4に第1アーム側傘歯車軸H2がベアリング3によって回転可能に貫通されて設けられ、これにより、第1アームFの接続部材Hに対して第2アームGが回転可能となっている。一方で、第2アームGに設けられている駆動力を発生するモータが収容されたモータケース1、第2アーム側傘歯車1a(回転体に相当)、モータケース接続軸1bは互いに固定されて一体的に構成されている。そして、第2アームGの接続軸孔G5にモータケース接続軸1bがベアリング4によって回転可能に貫通されて設けられ、これにより、第2アームGにおいてモータケース1が回転可能となっている。さらに、モータケース1は、動力伝達輪Uを支持している動力伝達輪支持体U2と接続されている。動力伝達輪支持体U2は、図8および図9に示すようにモータケース1に揺動可能に取り付けられ、モータケース1内に収容された図示しない付勢手段によって動力伝達輪Uを球状表面部Q1に押付けるように付勢している。また、動力伝達輪支持体U2は、駆動輪W1に設けられた半球状体Qの本体Dの中心軸に沿う方向における中心軸周りに回転して、動力伝達輪Uを球状表面部Q1に押付けて接触させつつ球状表面部Q1上での位置変更を可能となるように支持している。
【0037】
また、第1アームFと第2アームGの接続部において、第1アーム側傘歯車H1が第2アーム側傘歯車1a(回転体に相当)と噛合するように設けられている。また、第2アームGには、第2アーム側傘歯車1a(回転体に相当)が回転することで、モータケース1を介して動力伝達輪支持体U2が回転する回転連係機構が備えられている。
【0038】
そして、図9に示すように、動力伝達輪支持体U2によって支持されている動力伝達輪Uの球状表面部Q1における移動角度Pはアーム交差角度Apと同じ角度になるように構成されている。これにより、移動角度P、アーム交差角度Ap、交差角度Aは実質的に同じ角度となる。従って、これらの機構が含まれる動力伝達輪位置調整機構Vにより、第1アームFに対する第2アームGの回転動作を、動力伝達輪支持体U2の回転動作に連携して、動力伝達輪支持体U2が支持する動力伝達輪Uが半球状体Q上を接触しつつ移動して、駆動輪W1の回転速度が調節される。
【0039】
また、速度調整機構は、本体Dが直管状の管内を移動する状態における第1直線L1と第2直線L2との相対的な位置関係である基準位置関係Tに基づいて駆動輪W1の回転速度を増速又は減速させる。
本実施形態においては、本体Dが直管状の管内を移動する状態(図1〜図3参照)における基準位置関係Tは図8(a)に示すような第1アームFに対する第2アームGの位置関係となる。つまり、第1アームFの接続部材Hに含まれる第1直線部L1pと、第2アームGに含まれる第2直線部L2pが平行となる位置関係となる。この状態においては、動力伝達輪Uは図8(b)に示すように半球状体Qの回転軸Qaと直交する方向に位置するように構成されている。
【0040】
そして、図9(a)に示すように、第2アームGが第2アームGの第2直線部L2pが第1アームFの第1直線部L1pから離れる方向である所定の一方向へ回転(図9(a)中左回転)して形成されるアーム交差角度Apの大きさに応じて動力伝達輪位置調整機構Vにより動力伝達輪Uが球状表面部Q1に接触しつつ半球状体Qの回転軸Qaに近づく方向へと回転移動する(図9(b)中左回転)。そうすると、動力伝達輪Uが半球状体Qを一周させるに要する距離が短くなるので、モータによって駆動される動力伝達輪Uの回転速度を一定とした場合、半球状体Qの回転速度、すなわち駆動輪W1の回転速度が速くなる。一方で、第2アームGが所定の一方向と反対の他方向(図9(a)中右回転)へ回転すると、動力伝達輪Uは半球状体Qの回転軸Qaから離れる方向へと回転移動(図9(b)中左回転)して、駆動輪W1の回転速度が遅くなる。
【0041】
また、第2アームGには、基準位置関係Tにある第2アームGの他方向への回転であって従動輪W2が本体Dに近接する方向への回転が規制される回転規制体Iが備えられる。本実施形態においては、第1アームFの接続部材Hが回転規制体Iとしての役割を兼ねている。これにより、本体Dが直管状の管内を移動するときの基準位置関係Tにある駆動輪W1の回転速度を最も遅い回転速度として、管内の形状が変化する曲り部や縮径部において駆動輪W1の回転速度を増加させて、本体Dの進行方向の速度を一定に維持しつつ管内を移動することができる。
【0042】
そして、上述の速度調整機構によって、アーム交差角度Apに対して駆動輪W1の回転速度が、以下のように調節される。ここで、動力伝達輪Uと半球状体Qの接触部における速度をVm、基準位置関係Tでの駆動輪W1の回転速度および角速度をそれぞれVw0、ωw0とし、アーム交差角度Apをα度としたときの駆動輪W1の回転速度および角速度をそれぞれVw、ωwとし、駆動輪W1の半径をrとすると、動力伝達輪Uの回転速度を一定すなわちVm=constとした場合、下記数式(3)および数式(4)が求められる。
ωw0=Vm/r・・・(3)
ωw=Vm/(r・cosα)・・・(4)
【0043】
ここで、Vw0=rw・ωw0、Vw=rw・ωwであるので、下記数式(5)が求められる。
Vw/Vw0=1/cosα・・・(5)
【0044】
従って上記の数式(5)によって、アーム交差角度Apより駆動輪W1の回転速度が変化するように構成されている。これによって、後述するように管内の形状変化部をスムーズに通過することができる。
【0045】
図4に示したのは、管内移動装置Cが管内径の縮径部に差し掛かったときの状態の一例である。直管状の管内の内壁面に対する傾斜壁面の傾きの角度である傾斜角度Mをα度とした縮径部の傾斜壁面の走行距離は、管内を移動方向Xに同じ距離だけ進む場合において、直管状の管内壁よりも傾斜している分だけ長くなり、直管状の管内壁の(1/cosα)倍の走行距離となる。従って、直管状の管内を走行中の管内移動装置Cが、その移動方向Xの速度を保ちつつ滑らかに縮径部を通過するためには、その傾斜壁面を走行する駆動輪W1の速度は、直管状の管内壁を走行する駆動輪W1の速度と比較して(1/cosα)倍とする必要がある。これに対して、本実施形態に係る管内移動装置Cは、このような傾斜角度Mをα度とする縮径部において、第2アームGが縮径部の傾斜壁面の傾斜角度Mに対応して回転してα度のアーム交差角度Apを形成する。そのときのアーム部Eは図9(a)および図9(b)に示される状態となっており、図9(b)に示す動力伝達輪Uの球状表面部Q1における移動角度Pにおいてもアーム交差角度Apと同じα度を形成する。従って、上記の数式(5)からも明らかなように、駆動輪W1の速度が(1/cosα)に調節されるため、その移動方向Xの速度を維持しつつ滑らかに縮径部を通過することができる。なお、傾斜角度M、移動角度P、アーム交差角度Apおよび交差角度Aは実質的に同一であり、α度となっている。
【0046】
また、管内径の縮径部においては、本体Dの移動方向Xの前後一対に備えられた前方側のアーム部Eの第2アームGと後方側のアーム部Eの第2アームGでは、第2アームGが第1アームFに対して形成するアーム交差角度Apが所定の一方向とその反対側である他方向に回転して形成されるものとなるため、それらの駆動輪W1において回転速度が異なるものとなるが、後方側のアーム部Eの第2アームGについては、回転規制体Iにより基準位置関係Tの位置で回転が規制されることで、従動輪W2のみが管内壁に接触して、駆動輪W1が管内壁から離れた状態となるため、管内壁に接触する前方側のアーム部Eの第2アームGの駆動輪W1の回転速度によって本体Dが滑らかに縮径部を通過することができる。
【0047】
図10に示すのは、管内移動装置Cが管内の曲り部に差し掛かったときの状態の一例である。管内移動装置Cは曲り部を通過する際、曲り部の外側(図10中の管内下側)に位置する本体Dの移動方向Xの前後一対に備えられたアーム部Eの第2アームGについては、回転が規制されていない方向に回転して、駆動輪W1と従動輪W2が管内壁に接触する状態となる。その一方で、曲り部の内側(図10中の管内上側)に位置するアーム部Eの第2アームGについては、回転規制体Iにより基準位置関係Tの位置でその回転が規制されているので、図10のように従動輪W2のみが管内壁に接触して、駆動輪W1が管内壁から離れた状態となる。このように、曲り部の内側内壁面に接触する駆動輪W1と、外側内壁面に接触する駆動輪W1との距離差を、内側内壁面に接触する駆動輪W1を管内壁から離れた状態とすることで許容しつつ、外側内壁面に接触する駆動輪W1で駆動力を内壁面に与えつつ管内を進むことができる。また、曲り部の外側に位置するアーム部Eの第2アームGについては、回転が規制されていない一方向に回転してアーム交差角度Apを形成するため、速度調整手段によって駆動輪W1の速度が速くなるように調節される。これにより、管内の曲り部においても、移動速度を維持しつつ滑らかに通過することができる。
【0048】
〔別実施形態〕
(A)上記実施形態においては、複数のアーム部Eを本体Dの移動方向Xの前方側と後方側の夫々に前後一対となる状態で設けたが、これに限らず、複数のアーム部Eを本体Dの移動方向Xの前方側又は後方側のどちらかに設けるものとしてもよい。
【0049】
(B)上記実施形態においては、複数のアーム部Eを本体Dの移動方向Xの前方側と後方側の夫々に前後一対となる状態で、4対のアーム部Eが本体Dの周方向に互いに等間隔となるように配置されたが、これに限らず、2対または3対、あるいは5対以上のアーム部Eを本体Dの周方向に互いに等間隔となるように設けてもよい。
【0050】
(C)上記実施形態においては、アーム部Eは、第1アームFと第2アームGとで構成されたが、これに限らず、アーム部Eが第1アームFのみで構成されていてもよい。
【0051】
(D)上記実施形態においては、アーム部Eに駆動輪W1と従動輪W2が設けられたが、これに限らず、駆動輪W1のみが設けられていてもよい。
【0052】
(E)上記実施形態においては、第1アーム側傘歯車H1および第2アーム側傘歯車1aによって第1アームFの接続部材Hに対する第2アームGの回転を動力伝達輪支持体U2に伝達したが、これに限らず、ユニバーサルジョイントなどを用いて、第1アームFの接続部材Hに対する第2アームGの回転を動力伝達輪支持体U2に伝達してもよい。
【産業上の利用可能性】
【0053】
以上説明したように、異なる管径に適用可能であり、簡単な構造で駆動輪の速度調整を可能としてスムーズに管内の形状変化部を通過することができる管内移動装置を提供することができる。
【符号の説明】
【0054】
1a 第2アーム側傘歯車(回転体)
A 交差角度
B 接続体
C 管内移動装置
D 本体
D2 付勢手段接続部
E アーム部
F 第1アーム
F1 揺動アーム
Ft 引張力
G 第2アーム
H 接続部材
K 付勢手段
L1 第1直線
L1p 第1直線部
L2 第2直線
L2p 第2直線部
Q 半球状体
Q1 球状表面部
R 押圧力
T 基準位置関係
U 動力伝達輪
U2 動力伝達輪支持体
V 動力伝達輪位置調整機構
W1 駆動輪
W2 従動輪
【特許請求の範囲】
【請求項1】
本体とその本体から外側に延設された複数のアーム部を備え、前記複数のアーム部は、前記本体の周方向に分散して配置されており、前記複数のアーム部の夫々は、その先端部に管内壁に接触して回転駆動自在な駆動輪が支持され、その基端部が前記本体に揺動自在に接続され、前記駆動輪を前記管内壁に押圧する側に前記アーム部を付勢する付勢手段が備えられている管内移動装置であって、
前記本体の中心軸に沿って前記本体の移動方向に延びる第1直線に対して、前記駆動輪が前記管内壁に接触する接触点を通りその接線方向に延びる第2直線が交差する場合に、前記第1直線に対する前記第2直線の交差により形成される交差角度の大きさの変化に伴って前記駆動輪の回転速度を変更させる速度調整機構を備え、
前記速度調整機構は、前記本体が直管状の管内を移動する状態における前記第1直線と前記第2直線との相対的な位置関係である基準位置関係に基づいて前記駆動輪の回転速度を増速又は減速させる管内移動装置。
【請求項2】
前記速度調整機構は、前記駆動輪に設けられた半球状体と、前記半球状体の球状表面部に接触して回転駆動力を前記駆動輪に伝達する動力伝達輪と、前記交差角度の大きさの変化に応じて前記動力伝達輪が前記球状表面部に接触する位置を変更して、前記駆動輪の回転速度を変更させる動力伝達輪位置調整機構とが備えられている請求項1に記載の管内移動装置。
【請求項3】
前記動力伝達輪位置調整機構は、前記交差角度の大きさの変化に伴って回転自在な回転体と、前記本体の中心軸に沿う方向における前記半球状体の中心軸周りに回転して前記動力伝達輪が前記球状表面部に接触する位置を変更自在に前記動力伝達輪を支持する動力伝達輪支持体と、前記回転体の回転により前記動力伝達輪が前記球状表面部に接触する位置を変更するように前記回転体の回転と前記動力伝達輪支持体の回転とを連係させる回転連係機構とを備えている請求項2に記載の管内移動装置。
【請求項4】
前記アーム部は、前記本体に揺動自在に接続された第1アームと、当該第1アームに揺動自在に接続されて前記駆動輪が設けられた第2アームとで構成され、
前記第1アームは、前記第2アームとの接続部に備えられた接続部材と、当該接続部材と前記本体とに揺動自在に備えられた2本以上の揺動アームと、前記本体とにより構成された平行四辺形のリンク機構を備え、前記接続部材は前記第1直線と平行な第1直線部が設けられ、
前記第2アームは、前記第2直線と平行な第2直線部を備えている請求項1〜3の何れか1項に記載の管内移動装置。
【請求項5】
前記第2アームが前記第1アームに対して所定の一方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が速くなり、前記所定の一方向と反対の他方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が遅くなる速度調整機構を備えた請求項4記載の管内移動装置。
【請求項6】
前記複数のアーム部が、前記本体の移動方向の前方側と後方側の夫々に前後一対備えられ、前記第2アームには、その一端部に前記駆動輪が設けられるとともに、他端部に回転自在な従動輪が前記駆動輪よりも前記本体に近接するように設けられ、
前記基準位置関係にある前記第2アームの前記他方向としての前記従動輪が前記本体に近接する方向への回転が規制される回転規制体が備えられた請求項5に記載の管内移動装置。
【請求項7】
前記付勢手段が前記本体の付勢手段接続部と前記アーム部との間に、前記アーム部が前記付勢手段接続部に向かう押圧力規定方向への引張力を受けるように設けられ、当該引張力によって前記アーム部が前記管内壁の方向へ押圧される押圧力が発生し、前記管内の内径が変化した場合でも、前記押圧力が一定の範囲に維持される請求項1〜6のいずれか1項に記載の管内移動装置。
【請求項8】
前記本体は複数備えられ、本体同士が接続体にて接続されている請求項1〜7のいずれか1項に記載の管内移動装置。
【請求項1】
本体とその本体から外側に延設された複数のアーム部を備え、前記複数のアーム部は、前記本体の周方向に分散して配置されており、前記複数のアーム部の夫々は、その先端部に管内壁に接触して回転駆動自在な駆動輪が支持され、その基端部が前記本体に揺動自在に接続され、前記駆動輪を前記管内壁に押圧する側に前記アーム部を付勢する付勢手段が備えられている管内移動装置であって、
前記本体の中心軸に沿って前記本体の移動方向に延びる第1直線に対して、前記駆動輪が前記管内壁に接触する接触点を通りその接線方向に延びる第2直線が交差する場合に、前記第1直線に対する前記第2直線の交差により形成される交差角度の大きさの変化に伴って前記駆動輪の回転速度を変更させる速度調整機構を備え、
前記速度調整機構は、前記本体が直管状の管内を移動する状態における前記第1直線と前記第2直線との相対的な位置関係である基準位置関係に基づいて前記駆動輪の回転速度を増速又は減速させる管内移動装置。
【請求項2】
前記速度調整機構は、前記駆動輪に設けられた半球状体と、前記半球状体の球状表面部に接触して回転駆動力を前記駆動輪に伝達する動力伝達輪と、前記交差角度の大きさの変化に応じて前記動力伝達輪が前記球状表面部に接触する位置を変更して、前記駆動輪の回転速度を変更させる動力伝達輪位置調整機構とが備えられている請求項1に記載の管内移動装置。
【請求項3】
前記動力伝達輪位置調整機構は、前記交差角度の大きさの変化に伴って回転自在な回転体と、前記本体の中心軸に沿う方向における前記半球状体の中心軸周りに回転して前記動力伝達輪が前記球状表面部に接触する位置を変更自在に前記動力伝達輪を支持する動力伝達輪支持体と、前記回転体の回転により前記動力伝達輪が前記球状表面部に接触する位置を変更するように前記回転体の回転と前記動力伝達輪支持体の回転とを連係させる回転連係機構とを備えている請求項2に記載の管内移動装置。
【請求項4】
前記アーム部は、前記本体に揺動自在に接続された第1アームと、当該第1アームに揺動自在に接続されて前記駆動輪が設けられた第2アームとで構成され、
前記第1アームは、前記第2アームとの接続部に備えられた接続部材と、当該接続部材と前記本体とに揺動自在に備えられた2本以上の揺動アームと、前記本体とにより構成された平行四辺形のリンク機構を備え、前記接続部材は前記第1直線と平行な第1直線部が設けられ、
前記第2アームは、前記第2直線と平行な第2直線部を備えている請求項1〜3の何れか1項に記載の管内移動装置。
【請求項5】
前記第2アームが前記第1アームに対して所定の一方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が速くなり、前記所定の一方向と反対の他方向へ回転して形成される前記交差角度の大きさに応じて前記駆動輪の回転速度が遅くなる速度調整機構を備えた請求項4記載の管内移動装置。
【請求項6】
前記複数のアーム部が、前記本体の移動方向の前方側と後方側の夫々に前後一対備えられ、前記第2アームには、その一端部に前記駆動輪が設けられるとともに、他端部に回転自在な従動輪が前記駆動輪よりも前記本体に近接するように設けられ、
前記基準位置関係にある前記第2アームの前記他方向としての前記従動輪が前記本体に近接する方向への回転が規制される回転規制体が備えられた請求項5に記載の管内移動装置。
【請求項7】
前記付勢手段が前記本体の付勢手段接続部と前記アーム部との間に、前記アーム部が前記付勢手段接続部に向かう押圧力規定方向への引張力を受けるように設けられ、当該引張力によって前記アーム部が前記管内壁の方向へ押圧される押圧力が発生し、前記管内の内径が変化した場合でも、前記押圧力が一定の範囲に維持される請求項1〜6のいずれか1項に記載の管内移動装置。
【請求項8】
前記本体は複数備えられ、本体同士が接続体にて接続されている請求項1〜7のいずれか1項に記載の管内移動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−95254(P2013−95254A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239490(P2011−239490)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000000284)大阪瓦斯株式会社 (2,453)
【出願人】(503132280)特定非営利活動法人 国際レスキューシステム研究機構 (6)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000000284)大阪瓦斯株式会社 (2,453)
【出願人】(503132280)特定非営利活動法人 国際レスキューシステム研究機構 (6)
[ Back to top ]