
系統連系インバータ装置の単独運転検出装置
【課題】系統連系インバータの単独運転状態を高速かつ高い精度で検出する。
【解決手段】単独運転検出装置7は変動制御信号生成器71で生成した周波数の変化率に比例して振幅が変動する変動制御信号を制御装置6に入力してインバータ2の出力電圧の振幅を、周波数の変化率に応じて変動量が増大するように変動させる。単独運転検出装置7は交流電圧検出器8で検出したインバータ2の三相出力電圧に含まれる不平衡成分と高調波成分を複素係数バンドパスフィルタによって除去し、複素係数バンドパスフィルタから出力される基本波成分のみを用いて周波数を検出する。そして、その周波数の変動量を求め、その変動量が所定の閾値を超えると、インバータ2が単独運転状態に移行したとして遮断器5により系統連系インバータ装置Aを電力系統Bから解列させる。
【解決手段】単独運転検出装置7は変動制御信号生成器71で生成した周波数の変化率に比例して振幅が変動する変動制御信号を制御装置6に入力してインバータ2の出力電圧の振幅を、周波数の変化率に応じて変動量が増大するように変動させる。単独運転検出装置7は交流電圧検出器8で検出したインバータ2の三相出力電圧に含まれる不平衡成分と高調波成分を複素係数バンドパスフィルタによって除去し、複素係数バンドパスフィルタから出力される基本波成分のみを用いて周波数を検出する。そして、その周波数の変動量を求め、その変動量が所定の閾値を超えると、インバータ2が単独運転状態に移行したとして遮断器5により系統連系インバータ装置Aを電力系統Bから解列させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電力系統に連系される系統連系インバータ装置の単独運転を検出する単独運転検出装置に関するものである。
【背景技術】
【0002】
電力系統に接続される分散型電源には、逆潮流有りの条件で高圧配電系統に連系する場合、単独運転を防止するために単独運転検出装置が設けられる。そして、分散電源の単独運転状態を検出する方式として、周波数変化率検出方式、QCモード周波数シフト方式、スリップモード周波数シフト方式、有効電力変動方式、無効電力変動方式等の単独運転時に発生する周波数変動を検出することによって単独運転を検出する種々の方式が知られている。周波数変化率検出方式は受動的な方式であるが、スリップモード周波数シフト方式、QCモード周波数シフト方式、有効電力変動方式、無効電力変動方式は能動的な方式である。
【0003】
周波数変化率検出方式は、分散型電源の出力と負荷の不平衡に起因する分散型電源の出力周波数の急変を検出する方式である。スリップモード周波数シフト方式は、単独運転時に無効電力負荷のC(キャパシタンス)成分が大きければ分散型電源の出力周波数が上昇し、L(インダクタンス)成分が大きければ、分散型電源の出力周波数が低下する特性を利用し、分散型電源の出力周波数が基準の周波数から変動するときにはその出力周波数の変動量を増幅して検出する方式である。具体的には、PCS(Power Conditioning System)に周波数−位相特性を持たせて、分散型電源の出力周波数が基準の周波数に対して上昇するときにはPCSの出力電流の位相を進めて正帰還により出力周波数の上昇を加速させ、分散型電源の出力周波数が基準の周波数に対して低下するときにはPCSの出力電流の位相を遅らせて正帰還により出力周波数の低下を加速させることによりその出力周波数の変動量を増幅し、その変動量によって単独運転を検出する方式である。
【0004】
QCモード周波数シフト方式は、スリップモード周波数シフト方式と同様に上記の周波数特性を利用するものであるが、出力周波数ではなく出力周波数の変化率を正帰還させることによってPCSの出力電流の位相を増幅させる方式である。
【0005】
有効電力変動方式は、PCSの出力に周期的な有効電力の変動を与え、PCSの出力電圧、出力電流、出力周波数の変動量に基づいて単独運転の有無を検出する方式である。また、無効電力変動方式は、PCSの出力に周期的な無効電力の変動を与え、PCSの出力電圧、出力電流、出力周波数の変動量に基づいて単独運転の有無を検出する方式である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−41820号公報
【特許文献1】特開平2000−358331号公報
【特許文献2】特開平2002−281674号公報
【特許文献3】特開平2007−252127号公報
【特許文献4】特開平2011−30306号公報
【特許文献5】特開平2006−25550号公報
【0007】
【非特許文献1】「電力系統事故時の異常電圧に対処したPLLおよび周波数検出方式」 電学論B,118巻9号,平成10年
【発明の概要】
【発明が解決しようとする課題】
【0008】
系統連系インバータ装置を用いた分散型電源では、単独運転状態を検出したときには、例えば、1秒以内に系統連系インバータ装置を需要家(負荷)から切り離すか、運転を停止させることが要望されている。上記の単独運転検出方式で検出パラメータとして分散型電源の出力周波数を用いる方式では、高速かつ高精度の周波数検出装置が必要になる。
【0009】
その一方、分散型電源の出力周波数を検出する方法として、分散型電源から出力される交流電圧の瞬時値を検出し、その検出値がゼロレベルを交差する点(ゼロクロス点)間の時間を計測することにより分散型電源の出力周波数を検出する方式(ゼロクロス点間カウント方式)が知られている(特許文献6参照)。また、非特許文献1には、乗算式PLL(Phase Locked Loop)を用いて分散型電源から出力される交流電圧の位相を検出する位相検出装置を用いてその交流電圧の周波数を求める方式が提案されている。
【0010】
従来のゼロクロス点間カウント方式による周波数検出装置では、検出電圧のサンプリング値がゼロクロス点を検出するタイミングでしか周波数の算出処理ができないので、例えば、検出電圧をサンプリングする毎に周波数を検出するというような連続的な周波数の検出処理ができない。このため、周波数検出ができない期間に、電力系統の位相が急変したり、地絡事故により電圧不足が生じたりすると、周波数を正確に検出することができない(即応性や検出精度が良くない)という問題がある。
【0011】
また、三相の電力系統の周波数(以下、「系統周波数」という。)には、基本波正相成分(以下、単に「基本波成分」という。)の他に低次の高調波成分(例えば、5次,7次,11次の高調波成分。以下、単に「高調波成分」という。)や基本波逆相成分(以下、「不平衡成分」という。)が含まれることが多く、これらの成分が検出電圧に含まれていると、検出電圧の波形が正確に基本波成分の波形にならず(波形歪が生じ)、これにより基本波成分のゼロクロス点を正確に検出できず、周波数の検出精度が低下するという問題もある。
【0012】
一方、乗算式PLL方式の位相検出装置を用いて周波数を検出する方法は、分散型電源から出力される交流信号の周波数を直接検出するものではないので、検出精度の面で問題がある。PLLを用いた位相検出装置は、装置内で位相を生成し、その位相と入力される交流信号の位相との位相差を算出し、その位相差がゼロとなるように生成位相を制御することによって入力される交流信号の位相を検出するものであるから、位相差が生じた場合は、位相検出装置内で生成される位相が検出対象の位相からずれることになる。従って、位相検出装置内で生成される位相から周波数を算出する方法では、系統周波数が変動した場合の検出精度や応答速度の点で問題が生じる。
【0013】
従って、ゼロクロス点間カウント方式を用いた周波数検出装置を単独運転検出装置に適用する場合、検出の連続性や検出精度などの点で問題がある。また。乗算式PLL方式の位相検出装置を用いて周波数を検出する方法を単独運転検出装置に適用する場合も検出精度や応答速度の点で問題が生じる。
【0014】
本発明は、上記した事情のもとで考え出されたものであって、高速かつ高精度に系統連系インバータ装置の単独運転状態を検出することができる単独運転検出装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
請求項1に記載の系統連系インバータ装置の単独運転検出装置は、少なくとも電力系統に連系される系統連系インバータ装置から出力される交流信号の周波数を検出する周波数検出手段と、前記周波数検出手段の検出値に基づいて前記系統連系インバータ装置が単独運転状態に移行したことを検出する単独運転検出手段とを備える、系統連系インバータ装置の単独運転検出装置において、前記周波数検出手段は、前記交流信号を検出する交流信号検出手段と、前記交流信号検出手段で検出された前記交流信号に含まれる不平衡成分と高調波成分を除去し、基本波成分だけを出力する複素係数フィルタからなる第1のフィルタ手段と、前記第1のフィルタ手段から出力される前記交流信号の基本波成分を用いて当該基本波成分の周波数を算出する周波数算出手段と、を含むことを特徴とする。
【0016】
請求項1に記載の系統連系インバータ装置の単独運転検出装置において、前記第1のフィルタ手段の複素係数フィルタは、中心周波数が前記交流信号の周波数に設定された複素係数バンドパスフィルタであるとよい(請求項2)。
【0017】
また、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置において、前記周波数算出手段は、中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、前記第2のフィルタ手段に入力される前記交流信号の基本波成分と前記第2のフィルタ手段から出力される前記交流信号の基本波成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記交流信号の基本波成分の位相差を算出する位相差演算手段と、前記位相特性に基づき前記通過帯域における位相差から周波数を求めるための所定の関係式と前記位相差とを用いて、前記第2のフィルタ手段に入力された前記交流信号の基本波成分の周波数を演算する周波数演算手段と、を含む構成にするとよい(請求項3)。
【0018】
また、前記周波数算出手段は、中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、前記第2のフィルタ手段に入力される前記交流信号の基本波成分と前記第2のフィルタ手段から出力される前記交流信号の基本波成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記交流信号の基本波成分の位相差を算出する位相差演算手段と、前記位相特性に基づき予め設定された前記通過帯域における位相差と周波数との関係を示す所定のテーブルと、前記テーブルから前記位相差算出手段で算出された位相差に対応する周波数を読み出すことにより、前記第2のフィルタ手段に入力された前記交流信号の基本波成分の周波数を算出する周波数演算手段と、を含む構成にするとよい(請求項4)。
【0019】
また、前記周波数算出手段は、位相差が中心周波数では零で、当該中心周波数より大きい周波数領域では負になり、小さい周波数領域では正になる位相特性を有し、かつ、前記中心周波数が変更可能な通過帯域型の複数係数フィルタからなる第2のフィルタ手段と、前記第2のフィルタ手段に入力される前記交流信号の基本波成分と前記第2のフィルタ手段から出力される前記交流信号の基本波成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記交流信号の基本波成分の位相差を算出する位相差演算手段と、前記位相差算出手段で算出される位相差が正の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を所定の変化量で低下させ、前記位相差算出手段で算出される位相差が負の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を前記変化量で上昇させ、変化後の中心周波数を周波数の検出値として出力する中心周波数制御手段と、を含む構成にするとよい(請求項5)。
【0020】
請求項5に記載の系統連系インバータ装置の単独運転検出装置において、前記第1のフィルタ手段の複素係数フィルタは、前記中心周波数制御手段から出力される中心周波数に基づいて、当該中心周波数に対して負の周波数成分と所定次数の高調波成分となるように阻止周波数が制御される複数係数ノッチフィルタであるとよい(請求項6)。
【0021】
また、請求項1乃至6のいずれかに記載の系統連系インバータ装置の単独運転検出装置において、前記系統連系インバータ装置は、当該系統連系インバータ装置から出力される無効電力量を制御する電力メジャーループを有しており、前記周波数検出手段で検出される前記交流信号の周波数に基づいて、前記無効電力量を揺動させる無効電力変動値を生成し、前記電力メジャーループにフィードバックする無効電力変動値生成手段を更に備え、前記単独運転検出手段は、前記周波数検出手段で検出される周波数の変動量を算出し、その変動量が所定の閾値を超えることにより前記系統連系インバータ装置が単独運転状態に移行したことを検出するとよい(請求項7)。
【0022】
なお、請求項7に記載の系統連系インバータ装置の単独運転検出装置において、前記無効電力変動値生成手段は、前記周波数検出手段で検出される前記交流信号の周波数を用いて周波数変化率を算出し、その周波数変化率に比例して変動する前記無効電力変動値を生成するとよい(請求項8)。
【0023】
また、請求項1乃至8のいずれかに記載の系統連系インバータ装置の単独運転検出装置において、前記交流信号は、単相若しくは三相の交流信号である(請求項9)。
【発明の効果】
【0024】
本発明によれば、系統連系インバータ装置から出力される交流信号の検出値を複素係数フィルタに通すことによって不平衡成分と高調波成分を除去し、基本波成分のみを抽出した後、その基本波成分の周波数を算出するので、交流信号の周波数を高速かつ高精度に検出することができる。従って、簡単な構成で系統連系インバータ装置の単独運転を高速かつ高い精度で検出することができる。
【0025】
特に、複素係数フィルタとして複素係数ノッチフィルタを用いると、複素係数フィルタとしてバンドパスフィルタを用いた場合よりも不平衡成分や高調波成分を好適に除去することができ、より高速かつ高い精度で交流信号の周波数を検出することができる。
【0026】
また、系統連系インバータ装置から出力される交流信号の周波数を検出し、その周波数の変動に基づいて単独運転を検出する方式であれば、受動的な方式と能動的な方式とに関係なく、高い精度で高速に系統連系インバータ装置の単独運転を検出することができる。また、電力系統が単相電力系統と三相電力系統とに関係なく、高い精度で高速に系統連系インバータ装置の単独運転を検出することができる。
【図面の簡単な説明】
【0027】
【図1】本発明に係る単独運転検出装置を備えた系統連系インバータ装置の構成を示す図である。
【図2】制御装置内のPWM信号を生成するための処理の基本構成を示すブロック図である。
【図3】周波数検出部の第1実施形態のブロック構成を示す図である。
【図4】三相交流電圧の基本波成分と不平衡成分の関係を説明するための図である。
【図5】複素係数バンドパスフィルタを用いた複素係数バンドパスフィルタの周波数特性を示す図である。
【図6】複素係数バンドパスフィルタを用いた第1複素係数フィルタ部の演算処理を示すブロック図である。
【図7】複素係数バンドパスフィルタを用いた第1複素係数フィルタ部の複素演算処理を行う回路構成を示す図である。
【図8】不平衡成分と5次、7次、11次の高調波成分を含む三相交流電圧の波形を示す図である。
【図9】図8に示す三相交流電圧を複素係数フィルタ部でフィルタリングした三相交流電圧の波形を示す図である。
【図10】第2複素係数フィルタ部の通過帯域における位相特性の一例を示す図である。
【図11】位相差算出部の演算処理を行う回路構成を示す図である。
【図12】周波数算出部の演算処理を行う回路構成を示す図である。
【図13】第1実施形態に係る周波数検出器の応答特性をシミュレーションした結果を示す図である。
【図14】図13に示すシミュレーション結果のシミュレーション開始から0.3秒後に周波数検出器から出力される周波数の変動状態を拡大した図である。
【図15】周波数検出器の第2実施形態のブロック構成を示す図である。
【図16】第2実施形態の周波数検出器における第2複素係数フィルタ部の複素演算処理を行う回路構成を示す図である。
【図17】本発明に係る周波数検出器の第3実施形態のブロック構成を示す図である。
【図18】第3実施形態の周波数検出器における第1複素係数フィルタ部に設けられる複素係数ノッチフィルタの多段構成を示す図である。
【図19】複素係数ノッチフィルタを用いた第1複素係数フィルタ部の周波数特性を示す図である。
【図20】複素係数ノッチフィルタを用いた第1複素係数フィルタ部の演算処理を示すブロック図である。
【図21】複素係数ノッチフィルタを用いた第1複素係数フィルタ部の複素演算処理を行う回路構成を示す図である。
【図22】第3実施形態に係る周波数検出器の応答特性をシミュレーションした結果を示す図である。
【図23】図22に示すシミュレーション結果のシミュレーション開始から0.3秒後に周波数検出器から出力される周波数の変動状態を拡大した図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施の形態を、添付図面を参照して具体的に説明する。
【0029】
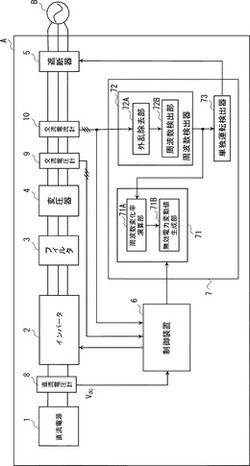
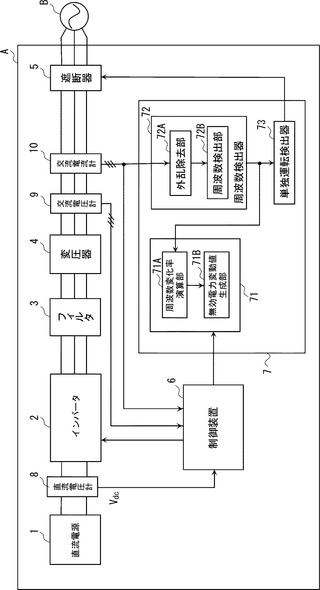
図1は、本発明に係る単独運転検出装置を備えた系統連系インバータ装置の構成を示す図である。図2は、制御装置6内のPWM信号を生成するための処理の基本構成を示すブロック図である。電力系統には一般に三相電力系統と単相電力系統が含まれるが、本実施形態では電力系統Bを三相電力系統とし、系統連系インバータ装置Aは電力を三相交流で電力系統Bに出力する三相インバータ装置として説明する。
【0030】
系統連系インバータ装置Aは、直流電源1で生成される直流電力をインバータ2で交流電力に変換し、インバータ2で生じるスイッチングノイズをフィルタ3で除去し、変圧器4で出力レベルを調整した後、遮断器5を介して電力系統Bに出力する基本的な構成を有するインバータである。系統連系インバータ装置Aは、インバータ2の出力電力を制御する制御装置6と、系統連系インバータ装置Aが単独運転状態となったか否かを監視し、単独運転状態になったことを検出すると、遮断器5を開いて系統連系インバータ装置Aを解列させる単独運転検出装置7を備える。
【0031】
制御装置6は、系統連系インバータ装置Aを電力系統Bに連系させるために、フィードバック制御により系統連系インバータ装置Aから出力される交流電圧を制御する。一方、単独運転検出装置7は、後述するように系統連系インバータ装置Aから出力される交流電圧の周波数fを検出し、その検出値を用いて系統連系インバータ装置Aが単独運転状態になったことを検出する。制御装置6のフィードバック制御のために系統連系インバータ装置Aの出力ラインの適所には系統連系インバータ装置Aから出力される交流電流と交流電圧を検出する検出器が設けられるが、図1では省略し、単独運転検出装置7が系統連系インバータ装置Aの出力電圧の周波数fを検出するための交流電圧検出器8だけを記載している。
【0032】
直流電源1は、例えば、太陽光発電、太陽熱発電、風力発電等によって生成される電気エネルギーを直流で出力する電源や燃料電池等の電池電源である。直流電源1には光エネルギー、機械エネルギー、熱エネルギー等の任意のエネルギーを直流出力する電源装置を適用することができるが、以下の説明では、直流電源1として太陽電池を用いた例で説明する。
【0033】
インバータ2は、例えば、6個のスイッチング素子(IGBT(Insulated Gate Bipolar Transistor)やMOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)やGTO(Gate Turn-Off thyristor)などの半導体スイッチング素子)をブリッジ接続したフル・ブリッジ回路で構成される電圧制御型インバータである。フル・ブリッジ回路は、2個のスイッチング素子を直列に接続した3個の直列回路(アーム)を一対の電源ラインに並列に接続し、各アームの接続点を出力端子とする周知の回路である。
【0034】
各アームの一対のスイッチング素子は、制御装置4から入力される1組のパルス幅変調信号(PWM信号)によってそれぞれオン・オフ動作が制御される。各アームに入力される1組のPWM信号は、相互に位相が反転したPWM信号である。また、3個のアームに入力される3組のPWM信号は、パルス波形は同一であるが、位相が互いに2π/3ずつずれている。インバータ2は、3組のPWM信号によって3個のアームの接続点の相対的な電圧が順番に切り替えられ、これにより直流電源1から入力される直流電圧が三相交流電圧に変換されて3個のアームの接続点から出力する。
【0035】
フィルタ3は、インバータ2におけるスイッチング素子のスイッチング動作により三相交流電圧に含まれる高周波スイッチングノイズを除去する。フィルタ3は、リアクトルとコンデンサのL字型回路からなるローパスフィルタで構成される。変圧器4は、三相トランスで構成され、フィルタ3から出力される交流電圧を電力系統Bの系統電圧とほぼ同一のレベルに昇圧または降圧する。
【0036】
遮断器5は、例えば、電磁開閉器で構成される。遮断器5は、単独運転検出装置7から系統連系インバータ装置Aの単独運転状態を検出した検出信号が出力されると、開動作を行い、系統連系インバータ装置Aと電力系統Bとの接続を切断する。なお、遮断器5は制御装置6によっても制御され、系統連系インバータ装置Aの運転異常などのときには制御装置6が遮断器5によって系統連系インバータ装置Aと電力系統Bとの接続を切断するが、図1ではその構成は省略している。
【0037】
制御装置6は、マイクロコンピュータ若しくはFPGA(Field-Programmable Gate Array)により構成され、ディジタル演算処理によりPWM信号の生成処理を行う。制御装置6は、U,V,Wの各相について、インバータ2の出力電圧の制御目標vuo,vvo,vwo(フィルタ3を通過した正弦波の交流電圧)を変調波として生成し、その制御目標vuo,vvo,vwoを搬送波である所定の三角波vtと比較することによりPWM信号を生成する。
【0038】
U相の制御目標vuoは、インバータ2の出力電流iuがインバータ2と電力系統Bとの間のインピーダンス(主としてフィルタ3と変圧器4のリアクトルによるインピーダンス。以下、「連系用リアクトル」という。)を流れることによる電圧降下分の電圧を系統電圧にベクトル合成した電圧の振幅に相当する。系統電圧は電力系統Bにより制御されるので、制御装置6は、連系用リアクトルの電圧を制御することにより制御目標vuoを制御する。連系用リアクトルはフィルタ3及び変圧器4の設計値として固定されるから、連系用リアクトルの電圧は、インバータ2の出力電流iuにより制御される。従って、制御装置6は、実質的にインバータ2出力電流iuを制御することによって制御目標vuoを制御する。V相,W相の制御目標vvo,vwoについても同様である。
【0039】
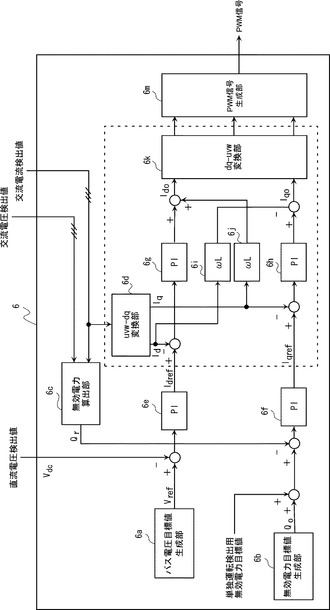
図2に示す制御装置6内のバス電圧目標値生成部6a、無効電力目標値生成部6b、無効電力算出部6c、uvw−dq変換部6d、PI補償部6e,6f,6g,6h、非干渉化部6i,6j、dq−uvw変換部6kは電力メジャーループにより出力電圧の制御目標vuo,vvo,vwoを生成するための処理ブロックである。点線で囲まれたブロック(uvw−dq変換部6d、PI補償部6g,6h、非干渉化部6i,6j及びdq−uvw変換部6kによる処理部分)は電流マイナーループを構成する部分である。また、PWM信号生成部6mは、制御目標vuo,vvo,vwoと三角波vtを比較してPWM信号を生成する処理ブロックである。なお、dq−uvw変換部6kの前段若しくは後段に系統電圧対抗分を加算する処理ブロックが設けられるが、図2ではその処理ブロックを省略している。
【0040】
制御装置6は、dq回転座標系(電力系統Bの周波数で回転する座標系)でインバータ2の出力電流の制御目標Ido,Iqoを生成する。すなわち、制御装置6は、バス電圧目標値生成部6aでインバータ2に入力される直流電圧(以下、「バス電圧」という。)の基準値Vrefを設定し、そのバス電圧基準値Vrefに対する直流電圧計8で実測されるバス電圧Vdcの偏差ΔVdc=Vref−Vdcを求め、その偏差ΔVdcにPI補償部6eで所定のPI補償演算をしてdq回転座標系におけるインバータ2の出力電流の制御基準のd軸成分Idrefを設定する。
【0041】
また、制御装置6は、無効電力目標値生成部6bで生成される無効電力目標値Qo(力率1の運転時ではQo=0)に後述する単独運転検出装置7から入力される無効電力変動値ΔQを加算して単独運転検出用の無効電力目標値Qo’=Qo+ΔQを設定する。無効電力変動値ΔQは、系統連系インバータ装置Aが単独運転状態に移行したことを検出するためにインバータ2から出力される無効電力Qoを能動的に変動させるための変動値である。
【0042】
制御装置6は、交流電圧計9で実測されるインバータ2の出力電圧vu,vv,vw及び交流電流計10で実測されるインバータ2の出力電流iu,iv,iwを用いて無効電力演算部6cでインバータ2から出力される無効電力Qrを算出し、単独運転検出用の無効電力目標値Qo’に対する無効電力算出値Qrの偏差ΔQ=Qo’−Qrを求める。そして、PI補償部6fでその偏差ΔQに所定のPI補償演算をしてdq回転座標系におけるインバータ2の出力電流の制御基準のq軸成分Iqrefを設定する。
【0043】
制御装置6は、交流電流計10で検出したインバータ2の出力電流iu,iv,iwをuvw−dq変換部6dで、
Id=√(2/3)・(iu・cos(θ)+iv・cos(θ−2π/3)+iw・cos(θ−4π/3))
Iq=√(2/3)・(−iu・sin(θ)−iv・sin(θ−2π/3)−iw・sin(θ−4π/3))
但し、θ=2πfs・t(fs:系統周波数)
のuvw−dq座標変換式によりdq回転座標系のd軸成分Idとq軸成分Iqに変換し、制御基準Idref,Iqrefに対する実測値のdq回転座標系におけるdq軸成分Id,Iqの偏差ΔId=Idref−Id,ΔIq=Iqref−Iqをそれぞれ算出する。
【0044】
制御装置6は、PI補償部6gで偏差ΔIdに所定のPI補償演算をするとともに、実測値のdq回転座標系におけるq軸成分Iqにフィルタ3のインピーダンス成分ωLを乗じて干渉量を演算し、その演算値を偏差ΔIdのPI補償演算値に加算してdq回転座標系におけるインバータ2の出力電流の制御目標のd軸成分Idoを設定する。また、制御装置6は、PI補償部6hで偏差ΔIqに所定のPI補償演算をするとともに、実測値のdq回転座標系におけるd軸成分Idにフィルタ3のインピーダンス成分ωLを乗じて干渉量を演算し、その演算値を偏差ΔIqのPI補償演算値から減算してdq回転座標系におけるインバータ2の出力電流の制御目標のq軸成分Iqoを設定する。
【0045】
そして、制御装置6は、その制御目標Ido,Iqoに図略の系統電圧対抗分をそれぞれ加算してdq回転座標系におけるインバータ2の出力電圧の制御目標のdq軸成分Vdo,Vqoを算出し、その制御目標Vdo,Vqoをdq−uvw変換部6kで、
vuo=[√(2/3)]・[Vdo・cos(θ)−Vqo・sin(θ)]
vvo=[√(2/3)]・[Vdo・cos(θ−2π/3)−Vqo・sin(θ−2π/3)]
vwo=[√(2/3)]・[Vdo・cos(θ−4π/3)−Vqo・sin(θ−4π/3)]
のdq−uvw座標変換式により静止座標系における三相電圧に変換することで、U,V,Wの各相の制御目標vuo,vvo,vwoを生成する。
【0046】
そして、制御装置6は、PWM信号生成部6mで制御目標vuo,vvo,vwoのレベルをそれぞれ三角波vtのレベルと比較し、比較結果に応じたレベルのパルス信号を生成することでU,V,Wの各相に対するPWM信号を生成する。各相に対するPWM信号はインバータ2の各アームのスイッチング素子に入力される。
【0047】
単独運転検出装置7は、QCモード周波数シフト方式により系統連系インバータ装置Aが単独運転状態となったか否かを検出する。QCモード周波数シフト方式は、上記したように、系統連系インバータAの出力周波数が基準の周波数(系統周波数)に対して上昇するときには系統連系インバータAの出力電流の位相を進めて正帰還により出力周波数の上昇を加速させ、系統連系インバータAの出力周波数が基準の周波数(系統周波数)に対して低下するときには系統連系インバータAの出力電流の位相を遅らせて正帰還により出力周波数の低下を加速させることによりその出力周波数の変動量を増幅し、その変動量によって単独運転を検出する方式である。
【0048】
系統連系インバータAの出力電流の位相は無効電力量を制御することにより制御されるから、単独運転検出装置7は、系統連系インバータAから出力される交流電流の周波数の変化率を検出し、その検出値に基づいて無効電力目標値Qoを変動させる変動値ΔQを設定し、制御装置6にフィードバックする。
【0049】
従って、単独運転検出装置7は、周波数変化率演算部71Aと無効電力変動値生成部71Bを含む無効電力変動制御器71、外乱除去部72Aと周波数抽出部72Bを含む周波数検出器72及び単独運転検出器73を備える。単独運転検出装置7は、マイクロコンピュータ若しくはFPGAによって構成され、ディジタル演算処理によって各器の処理を行う。
【0050】
無効電力変動制御器71は、周波数変化率演算部71Aで周波数検出器72によって検出される周波数fの変化率(df/dt)を演算し、無効電力変動値生成部71Bでその変化率(df/dt)の大きさと極性に応じて無効電力目標値Qoを変動させる無効電力変動値ΔQを生成する。無効電力変動値生成部71Bは、予め設定された周波数変化率(df/dt)と無効電力変動値ΔQの関係式を用いて無効電力変動値ΔQを生成し、その無効電力変動値ΔQを制御装置6に入力する。
【0051】
制御装置6では、上述したように、無効電力目標値生成部6bで生成した無効電力目標値Qoに無効電力変動値生成部71Bから入力される変動値ΔQを加算する処理が行われる。これによりが周波数変化率(df/dt)に応じて無効電力目標値Qo’変動し、この無効電力目標値Qo’の変動に伴いdq回転座標系におけるインバータ2の出力電流の制御目標のq軸成分Iqoが変動するので、dq軸成分Ido,Iqoをdq−uvw変換して得られる三相電圧の制御目標vuo,vvo,vwoの位相が変動することになる。
【0052】
そして、系統連系インバータAが単独運転状態になると、三相電圧の制御目標vuo,vvo,vwoの位相の変動量が増大し、制御目標vuo,vvo,vwoの周波数が系統周波数から大きく逸脱することになるので、後述するように単独運転検出装置7の単独運転検出器73がその状態を検出し、遮断器5によって系統連系インバータAを解列させることになる。
【0053】
周波数検出器72は、交流電圧検出器8によって検出される系統連系インバータ装置Aの出力電圧の周波数fを検出する。本実施形態に係る単独運転検出装置7は、周波数検出器72の構成に特徴を有する。以下、周波数検出器72の構成について詳細に説明する。
【0054】
図2は、周波数検出器72の第1実施形態のブロック構成を示す図である。
【0055】
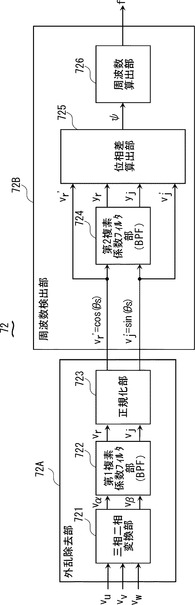
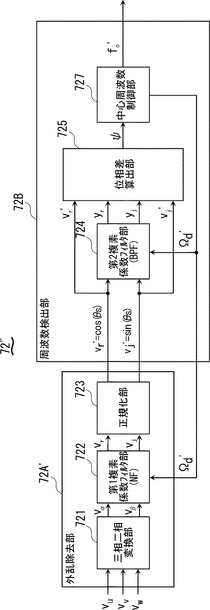
周波数検出器72は、交流電圧検出器8によって検出される三相交流電圧(U,V,Wの各相の相電圧)vu,vv,vwに含まれる不平衡成分や高調波成分など(周波数検出処理で外乱となる成分)を除去する外乱除去部72Aと、帯域通過型の複素係数フィルタ(複素係数バンドパスフィルタ)の位相特性を用いて外乱除去部721から出力される交流信号(三相交流電圧の基本波成分)の周波数を算出する周波数抽出部72Bと、で構成されている。
【0056】
外乱除去部72Aは、交流電圧検出器8から入力される三相交流電圧vu,vv,vw(所定のサンプリング周期で入力される瞬時値)を互いに直交する二相交流電圧vα,vβに変換する三相/二相変換部721と、三相/二相変換部721から出力される二相交流電圧vα,vβに含まれる不平衡成分(周波数−fsの成分)と所定次数の高調波成分(主として5次高調波成分(−5fs)、7次高調波成分(+7fs)、11次高調波成分(−11fs)などの高調波成分)を除去する複素係数バンドパスフィルタを用いた第1複素係数フィルタ部722と、第1複素係数フィルタ部722から出力される不平衡成分及び高調波成分を含まない二相交流電圧vr,vjを正規化する正規化部723と、を含む。
【0057】
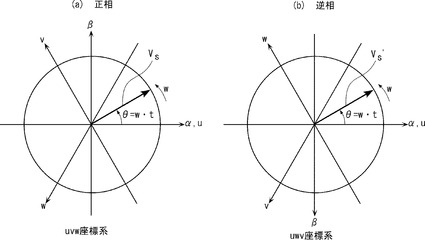
三相/二相変換部721は、交流電圧検出器8から入力される三相交流電圧vu,vv,vwを二相交流電圧vα,vβに変換する処理を行う。図4(a)に示すように、静止座標系として水平方向のu軸を位相θの基準軸とし、u軸に対して±2π/3の角度で開いた方向にv軸とw軸を反時計回りに配置したuvw座標系と、u軸に沿うα軸とそのα軸に直交するβ軸とを配置したαβ座標系(静止直交座標系)とを設け、これらの座標系で角速度ωで反時計回りに回転する電圧ベクトルVを考えると、対称三相交流電圧vu,vv,vwは、電圧ベクトルVのu軸成分、v軸成分及びw軸成分と考えられ、二相交流電圧vα,vβは、電圧ベクトルVのα軸成分、β軸成分と考えることができる。
【0058】
従って、三相二相変換処理は、電圧ベクトルVのu軸成分vu、v軸成分vv及びw軸成分vwを電圧ベクトルVのα軸成分vαとβ軸成分vβに変換する処理である。なお、以下の説明では、交流信号と交流信号のベクトルを区別するため、交流信号を小文字で表記し、交流信号のベクトルを大文字で表記することとする。
【0059】
三相交流電圧vu,vv,vwを二相交流電圧vα,vβに変換する変換式は、
【数1】

である。
【0060】
三相/二相変換部721は、(1)式,(2)式の演算を行うことにより交流電圧検出器8から入力される三相交流電圧vu,vv,vwを二相交流電圧vα,vβに変換する。
【0061】
交流電圧検出器8で検出される三相交流電圧vu,vv,vwは、一般に、基本波成分以外に不平衡成分や3次、5次、7次、11次などの奇数次の高調波成分(図5の周波数成分参照)が含まれる非対称三相交流電圧である。従って、三相/二相変換部721からはこれらの成分についても三相二相変換した成分を含む二相交流電圧vα’,vβ’が出力される。
【0062】
三相交流電圧vu,vv,vwの基本波成分vsu,vsv,vswは、基本波の電圧ベクトルVsのuvw座標系におけるu、v、wの各軸方向の成分として定義される。一方、三相交流電圧vu,vv,vwの不平衡成分vsu’,vsv’,vsw’は、図4(b)に示すように、uvw座標系に対してu軸、v軸及びw軸の配列順が逆になっているuwv座標系において、不平衡成分の電圧ベクトルVs’のu、v、wの各軸方向の成分として定義される。
【0063】
基本波成分vsu,vsv,vswを、
vsu=As・cos(ωs・t) …(3A)
vsv=As・cos(ωs・t-2π/3) …(3B)
vsw=As・cos(ωs・t-4π/3) …(3B)
但し、As;基本波成分の振幅
とすると、不平衡成分vsu’,vsv’,vsw’は、
vsu’=As’・cos(ωs・t) …(4A)
vsv’=As’・cos(ωs・t-4π/3) …(4B)
vsw’=As’・cos(ωs・t-2π/3) …(4C)
但し、As’;不平衡成分の振幅
で表わされる。
【0064】
(3A)式〜(3C)式を(1)式,(2)式に代入して基本波成分の二相交流電圧vsα,vsβを求めると、
vsα=√(3/2)・As・cos(ωs・t) …(5)
vsβ=√(3/2)・As・sin(ωs・t) …(6)
となる。また、(4A)式〜(4C)式を(1)式,(2)式に代入して不平衡成分の二相交流電圧vsα’,vsβ’を求めると、
vsα’=√(3/2)・As’・cos(ωs・t)
vsβ’=−√(3/2)・As’・sin(ωs・t)
となる。そして、cos(ωs・t)=cos(−ωs・t)、−sin(ωs・t)=sin(−ωs・t)であるから、不平衡成分の二相交流電圧vsα’,vsβ’は、
vsα’=√(3/2)・As’・cos(−ωs・t) …(7)
vsβ’=√(3/2)・As’・sin(−ωs・t) …(8)
となる。
【0065】
(7)式及び(8)式と(5)式及び(6)式を比較すると、基本波成分の角周波数は「ωs」であるのに対し、不平衡成分の角周波数は「−ωs」である点が相違する。角周波数ωsを「正の周波数」とすると、不平衡成分の角周波数−ωsは「負の周波数」となるから、不平衡成分vsu’,vsv’,vsw’を三相二相変換して得られる二相交流電圧vsα’,vsβ’は負の周波数を有する電圧ということができる。
【0066】
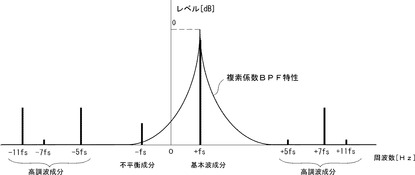
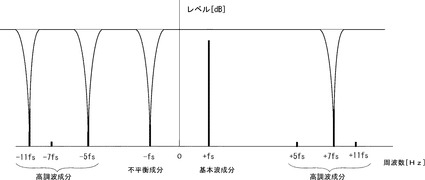
図5において、基本波成分を正の周波数領域の周波数「fs」の位置に表示し、不平衡成分の周波数を「−fs」として不平衡成分を負の周波数領域の周波数「−fs」の位置に表示しているのは上記の周波数の関係を示している。なお、図5には、周波数検出に影響のある高調波成分として5次、7次、11次の高調波成分のみを描いている。3の整数倍の高調波成分は線間電圧には表れず、相電圧でもΔ結線のトランスで除去され、11次よりも大きい奇数次の高調波成分はレベルが小さく、無視し得るから、図5には記載していない。
【0067】
基本波成分vsu,vsv,vswの5次、7次、11次の高調波成分vnu,vnv,vnw(nは次数。n=5,7,11)は、
vnu=An・cos(n・ωs・t) …(9)
vnv=An・cos(n・ωs・t-n・2π/3) …(10)
vnw=An・cos(n・ωs・t-n・4π/3) …(11)
で表わされるから、(9)式〜(11)式を(1)式,(2)式に代入して5次,7次,11次の高調波成分の二相交流電圧(V5α,V5β),(V7α,V7β),(V11α,V11β)を求めると、
v5α=√(3/2)・A5・cos(−5ωs・t) …(12)
v5β=√(3/2)・A5・sin(−5ωs・t) …(13)
v7α=√(3/2)・A7・cos(7ωs・t) …(14)
v7β=√(3/2)・A7・sin(7ωs・t) …(15)
v11α=√(3/2)・A11・cos(−11ωs・t) …(16)
v11β=√(3/2)・A11・sin(−11ωs・t) …(17)
となる。
【0068】
不平衡成分が負の周波数になるのは、不平衡成分の相順(uvwが時計回りの順)が基本波成分の相順(uvwが反時計回りの順)に対して逆になるからである。従って、基本波成分の周波数fsをn倍(n:2以上の整数)したn次高調波成分を三相二相変換した二相交流電圧vnα,vnβ(添え字のnは次数。以下、同じ)の角周波数ωnが基本波成分の二相交流電圧vsα,vsβと同じの符号になる場合は、そのn次高調波成分の周波数fnは正の周波数となり、n次高調波成分vnu,vnv,vnwの相順は基本波成分vsu,vsv,vswの相順と同一になる。逆に、二相交流電圧vnα,vnβの角周波数ωnが基本波成分の二相交流電圧vsα,vsβと逆の符号になる場合は、そのn次高調波成分の周波数fnは負の周波数となり、n次高調波成分vnu,vnv,vnwの相順は基本波成分vsu,vsv,vswの相順と逆になる。
【0069】
(12)式〜(17)式より、5次,11次の高調波成分は負の周波数を有し、7次の高調波成分は正の周波数を有するから、図5では、正相の5次高調波成分と11次高調波成分は、負の周波数領域の周波数「−5fs」と「−11fs」の位置にそれぞれ表示し、逆相の5次高調波成分と11次高調波成分は、正の周波数領域の周波数「5fs」と「11fs」の位置にそれぞれ表示している。また、正相の7次高調波成分は正の周波数領域の周波数「7fs」の位置に表示し、逆相の7次高調波成分は、負の周波数領域の周波数「−7fs」の位置に表示している。
【0070】
従って、三相/二相変換部721からは(5)式〜(8)式、(12)式〜(17)式で表わされる基本波成分、不平衡成分及び5次、7次、11次の高調波成分の二相交流電圧(vsα,vsβ),(vsα’,vsβ’),(vnα,vnβ)(n=5,7,11)を含む二相交流電圧vα’,vβ’が出力される。
【0071】
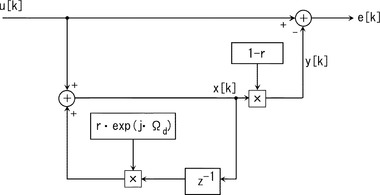
第1複素係数フィルタ部722は、z変換表現による伝達関数H(z)が下記の(18)式で表される1次のIIRバンドパスフィルタで構成され、図5に示す周波数特性を有している。(18)式において、複素係数a1におけるfd[Hz]は、通過帯域の中心周波数f0をサンプリング周波数で正規化した正規化周波数である。また、Ωd[rad/s]は、正規化角周波数である。例えば、サンプリング周波数を「fsr」とし、中心周波数f0を系統周波数fsに設定すると、fdはfs/fsr、Ωdは2π・fd=2π・(fs/fsr)となる。なお、正規化した角周波数Ωdは、−π<Ωd<πである。また、rは、通過帯域の帯域幅を決めるパラメータ(0<r<1)である。
【0072】
【数2】
【0073】
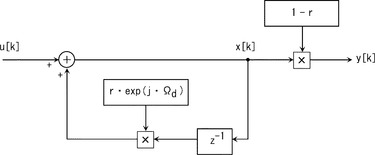
図6は、上記(18)式の演算処理を行う処理回路を示すブロック図である。同図に示すように、第1複素係数フィルタ部722は、(18)式の分母の演算処理がフィードバック回路で構成され、そのフィードバック回路の出力に分子の係数b0を乗算する回路によって構成される。
【0074】
図6に示すブロック図において、u[k](k:離散時間を表すインデックス番号)は入力データ、x[k]は第1複素係数フィルタ部722の状態データ、y[k]は第1複素係数フィルタ部722の出力データである。入力データu[k]、状態データx[k]及び出力データy[k]の間には、
x[k]=r・exp(j・Ωd)・x[k-1]+u[k] …(19)
y[k]=(1−r)・x[k] …(20)
が成立する。
【0075】
第1複素係数フィルタ部722は複素係数バンドパスフィルタで構成されるので、入力データu[k]が複素データか実データ(複素データの虚数部が「0」のデータ)かに関わらず、状態データx[k]及び出力データy[k]が複素信号のデータとなる。従って、入力データu[k]、状態データx[k]及び出力データy[k]をそれぞれu[k]=ur[k]+j・uj[k]、x[k]=xr[k]+j・xj[k]、y[k]=yr[k]+j・yj[k]の複素データ、複素係数a1をa1=r・exp(j・Ωd)=ar+j・aj=r・cos(Ωd)+j・r・sin(Ωd)として(19)式と(20)式に代入し、実数部と虚数部の関係式に分けると、
xr[k]=r・cos(Ωd)・xr[k-1]−r・sin(Ωd)・xj[k-1]+ur[k] …(21)
xj[k]=r・cos(Ωd)・xj[k-1]+r・sin(Ωd)・xr[k-1]+uj[k] …(22)
yr[k]=(1−r)・xr[k] …(23)
yj[k]=(1−r)・xj[k] …(24)
となる。
【0076】
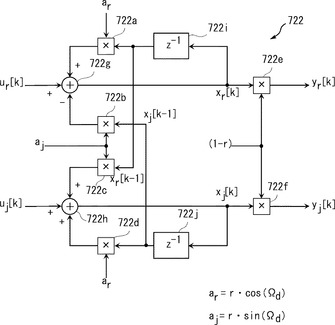
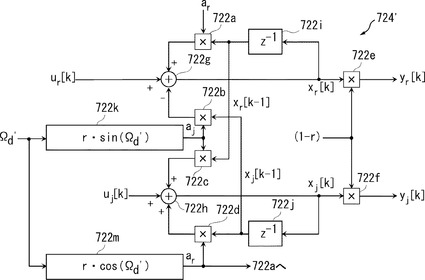
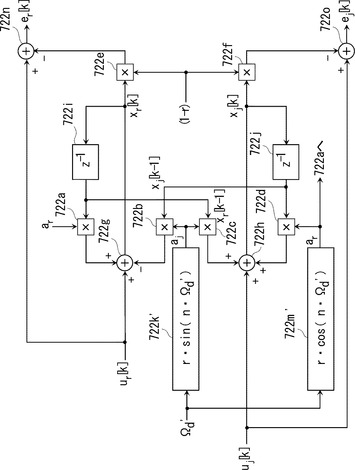
図7は、(21)式〜(24)式に基づき第1複素係数フィルタ部722の複素演算処理を行う回路構成を示す図である。同図において、係数arと係数ajはそれぞれ複素係数a1=r・exp(j・Ωd)の実数部と虚数部であり、ar=r・cos(Ωd)、aj=r・sin(Ωd)である。
【0077】
同図に示すように、第1複素係数フィルタ部722は、6個の乗算器722a〜722fと、2個の加算器722g,722hと、2個の遅延回路722i,722jで構成される。遅延回路722iは、状態データの実数部xr[k-1]を生成する回路であり、遅延回路722jは、状態データの虚数部xj[k-1]を生成する回路である。乗算器722a,722bはそれぞれ(21)式の第1項と第2項(負の符号を含む)を演算する演算器であり、加算器722gは(21)式の第1項と第2項と第3項を加算する演算器である。従って、加算器722gから(21)式で示す状態データの実数部xr[k]が出力される。
【0078】
一方、乗算器722c,722dはそれぞれ(22)式の第1項と第2項を演算する演算器であり、加算器722hは(22)式の第1項と第2項と第3項を加算する演算器である。従って、加算器722hから(22)式で示す状態データの虚数部xj[k]が出力される。また、乗算器722e,722fはそれぞれ(23)式と(24)式を演算する演算器である。
【0079】
本実施形態では、三相/二相変換部721を設け、三相交流電圧vu,vv,vwを互いに直交する二相交流電圧vα,vβに変換しているが、二相交流電圧vα,vβは、それぞれ複素データur+j・ujの実数部と虚数部に対応させることができるので、二相交流電圧vαのサンプリングデータを入力データの実数部ur[k]として加算器722gに入力し、二相交流電圧vβのサンプリングデータを入力データの虚数部uj[k]として加算器722hに入力している。
【0080】
二相交流電圧vαのサンプリングデータが第1複素係数フィルタ部722に入力される毎に、遅延回路722i、乗算器722a,722b,722e及び加算器722gで(21)式及び(23)式の演算処理が繰り返され、これにより、乗算器722eからは(5)式で示される基本波成分を三相二相変換した二相交流電圧vsαのみの出力データyr[k]が出力される。また、二相交流電圧vβのサンプリングデータが第1複素係数フィルタ部722に入力される毎に、遅延回路722j、乗算器722c,722d,722f及び加算器722hで(22)式及び(24)式の演算処理が繰り返され、これにより、乗算器722fからは(6)式で示される基本波成分を三相二相変換した二相交流電圧vsβのみの出力データyj[k]が出力される。
【0081】
バンドパスフィルタを実係数の2次IIRフィルタで構成した場合、その2次IIRフィルタの伝達関数H(z)(z=exp(j・ω))は、
H(z)=(1-r2+2(r-1)・r・cos(Ωd)・z-1)/(1-2r・cos(Ωd)・z-1+ r2・z-2)
で表わされる。この伝達関数H(z)の振幅特性M(ω)を求めると、M(ω)=(1-2r・cos(Ωd±ω)+r2)=0を満たすωで極が表れるから、2次IIRフィルタはその極の周波数を通過させる特性を有する。r≒1とすると、cos(Ωd±ω)≒1より、2次IIRフィルタを通過させる正規化周波数fdはfd=±Ωd/2πとなるから、正規化角周波数Ωdを基本波成分の角周波数に設定した実係数の2次IIRフィルタでは、不平衡成分(−fs=−Ωd・fsr/2πの成分)も通過させることになる。すなわち、図5に示す周波数特性において、2次IIRフィルタでは「−fs」に表れる不平衡成分も通過させることになる。
【0082】
一方、(18)式に示す伝達関数H(z)の振幅特性M(ω)求めると、M(ω)=(1−r)/√{1−2r・cos(Ωd−ω)+r2}となり、(1−2r・cos(Ωd−ω)+r2)=0を満たすωだけに極が表れるから、正規化角周波数Ωdを基本波成分の角周波数(ω=Ωd)に設定した複素係数の1次IIRフィルタは、図5に示す周波数特性を有する。従って、複素係数の1次IIRフィルタでは、基本波成分(fs=Ωd・fsr/2πの成分)だけを通過させ、不平衡成分や高調波成分を通過させることはない。
【0083】
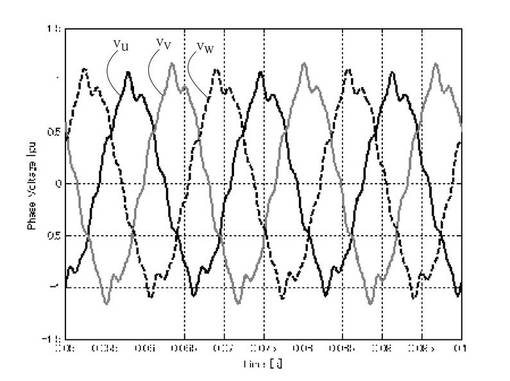
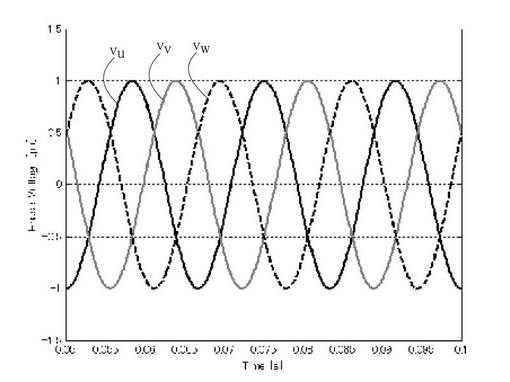
図8は、不平衡成分と5次、7次、11次の高調波成分を5%含む三相交流電圧vu,vv,vwの波形を示す図である。図9は、図8に示す三相交流電圧vu,vv,vwを三相/二相変換部721及び中心周波数f0を系統周波数fs(60[Hz])に設定した第1複素係数フィルタ部722によってフィルタリング処理をした後、二相交流電圧を三相交流電圧に逆変換して得た三相交流電圧vu’,vv’,vw’をシミュレートした波形を示す図である。
【0084】
中心周波数f0を系統周波数fsに設定した第1複素係数フィルタ部722は、図5に示す周波数特性を有するから、図9に示されるように、三相交流電圧vu,vv,vwに含まれる不平衡成分と5次、7次、11次の高調波成分を第1複素係数フィルタ部722により好適に除去できることが分かる。
【0085】
なお、図3では、第1複素係数フィルタ部722から出力データyr[k],yj[k]によって出力される二相交流電圧を、二相交流電圧vα,vβと区別するため、それぞれ「vr」,「vj」と表記している。
【0086】
第1複素係数フィルタ部722から出力される、(5)式,(6)式で表わされる二相交流電圧vr,vjは、U相の電圧vuの位相角φを「0」とした場合であるが、三相電力系統BのU相の電圧vuの位相がずれ、位相φ≠0の場合は、第1複素係数フィルタ部722から出力される二相交流電圧vr,vjは、vr=As・cos(ωs・t+φ)、vj=As・sin(ωs・t+φ)となる。
【0087】
正規化処理部723は、第1複素係数フィルタ部722から出力される二相交流電圧vr,vjのレベルを「1」に正規化する演算処理を行う。第1複素係数フィルタ部722から出力される二相交流電圧vr,vjは振幅が同一の正弦波と余弦波で、√(vr2+vj2)を演算することにより振幅が求められるから、正規化処理部723では、出力データyr[k],yj[k]に対してそれぞれyr[k]/√(yr[k]2+yj[k]2)とyj[k]/√(yr[k]2+yj[k]2)の演算処理を行って二相交流電圧vr,vjの正規化処理が行われる。従って、正規化処理部723からは、vr’=cos(θs)(θs=ωs・t)とvj’=sin(θs)で表わされる信号のデータが出力される。
【0088】
周波数抽出部72Bは、通過帯域における位相特性がリニアな複素係数バンドパスフィルタからなる第2複素係数フィルタ部724と、この第2複素係数フィルタ部724に入力される電圧ベクトルVin=exp(j・ωs・t)とこの第2複素係数フィルタ部724から出力される電圧ベクトルVout=exp(j・ωs・t+ψ)を用いて両電圧ベクトルの位相差ψを算出する位相差算出部725と、位相差算出部725で算出される位相差ψを所定の演算式を用いて電圧ベクトルVinの周波数f(=(ωs/2π)を算出する周波数算出部726と、を含む。
【0089】
第2複素係数フィルタ部724に用いられる複素係数バンドパスフィルタは、第1複素係数フィルタ部722に用いられる複素係数バンドパスフィルタと同一の中心周波数f0を有する。また、複素係数バンドパスフィルタは、その通過帯域における位相特性(周波数に対する位相の特性)が直線近似で表わされる特性を有している。
【0090】
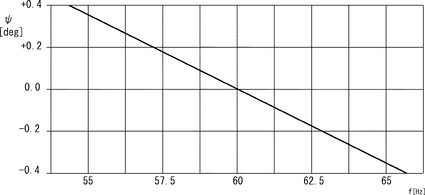
図10は、第2複素係数フィルタ部724に用いられる複素係数バンドパスフィルタの通過帯域における位相特性の一例を示す図である。同図は、中心周波数f0を系統周波数fs=60[Hz]に設定した場合のf0±5[Hz]における位相ψ[deg]の変化を示している。
【0091】
図10によれば、周波数fに対する位相ψの変化は直線的に変化し、位相ψと周波数fとの間にはf=p・ψ+qの関係式が成立する。f=60[Hz]でψ=0[deg]、f=57.25[Hz]でψ=0.2[deg]であるから、60=q、57.25=0.2・p+qよりp≒−13.75となり、図10の例では、位相特性と位相ψから周波数fを求める演算式は、f=−13.75・f+60となる。
【0092】
本実施形態では、第2複素係数フィルタ部724に用いられる複素係数バンドパスフィルタは、第1複素係数フィルタ部722に用いられる複素係数バンドパスフィルタと同一である。従って、その具体的な演算回路は、図7に示した回路と同じであるので、ここではその部分の詳細な説明は省略する。
【0093】
位相差算出部725は、第2複素係数フィルタ部724に入力される電圧ベクトルVinと第2複素係数フィルタ部724から出力される電圧ベクトルVoutを用いて位相差ψを算出する。電圧ベクトルVin=exp(j・ωs・t)の共役な電圧ベクトルVin*は、Vin*=exp(−j・ωs・t)であり、この電圧ベクトルVin*と出力電圧ベクトルVout=exp[j・(ωs・t+ψ)]との乗算を行うと、Vin*・Vout=exp(−j・ωs・t+j・ωs・t+j・ψ)=exp(j・ψ)より位相差ψのベクトルが得られる。電圧ベクトルVin*=exp(−j・ω・t)=Rin−j・Xin、電圧ベクトルVout=exp[j・(ωs・t+ψ)]=Rout+j・Xoutとすると、Vin*・Vout=(Rin・Rout+Xin・Xout)+j(Rin・Xout−Xin・Rout)=cos(ψ)+jsin(ψ)であるから、sin(ψ)=(Rin・Xout−Xin・Rout)より、位相差算出部725は、sin-1(Rin・Xout−Xin・Rout)の演算処理をすることにより位相差ψを算出する。
【0094】
なお、cos(ψ)=(Rin・Rout+Xin・Xout)より、cos-1(Rin・Rout+Xin・Xout)の演算処理をすることにより位相差ψを算出してもよく、tan(ψ)=(Rin・Xout−Xin・Rout)/(Rin・Rout+Xin・Xout)より、tan-1[(Rin・Xout−Xin・Rout)/(Rin・Rout+Xin・Xout)]の演算処理をすることにより位相差ψを算出してもよい。
【0095】
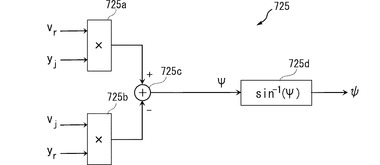
図11は、位相差算出部725の演算処理を行う回路構成を示す図である。
【0096】
位相差算出部725には第2複素係数フィルタ部724に入力される電圧ベクトルVinの実数部Rinと虚数部Xin、第2複素係数フィルタ部14から出力される電圧ベクトルVoutの実数部Routと虚数部Xoutの2つのデータが入力される。電圧ベクトルVinの実数部Rinは、正規化処理部723から出力される電圧vr’=cos(ωs・t)のデータであり、虚数部Xinは、正規化処理部723から出力される電圧vj’=sin(ωs・t)のデータである。一方、電圧ベクトルVoutの実数部Routは第2複素係数フィルタ部724から出力される電圧yr=cos(ωs・t+ψ)のデータであり、虚数部Xoutは第2複素係数フィルタ部724から出力される電圧yj=sin(ωs・t+ψ)のデータである。従って、位相差ψの演算式は、vr’・yj−vj’・yr=Ψとすると、
ψ=sin-1(Ψ) …(25)
となる。
【0097】
位相差算出部725は、2つの乗算器725a,725bと1つの加算器725cと逆正弦値演算器725dで構成されている。乗算器725aは、Ψの中のvr’・yjの乗算を行い、乗算器725bは、Ψの中のvj’・yrの乗算を行う。また、加算器725cは、乗算器725aの乗算結果から乗算器725bの乗算結果を減算して逆三角関数の引数Ψを算出する。そして、逆正弦値演算器725dは、加算器725cから出力される引数Ψに対してsin-1(Ψ)の演算を行い、位相差ψを算出する。
【0098】
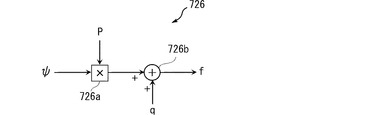
周波数算出部726は、位相差演算部725から入力される位相差ψに対して、第2複素係数フィルタ部724の位相特性に基づく周波数fを求めるための所定の演算式f=p・ψ+q(図10の例では、P=−13.5、q=60)を実行することにより周波数fを算出する。従って、周波数算出部726は、図12に示すように乗算器726aと加算器726bとによって構成される。乗算器726aは位相差演算部15から入力される位相差ψに係数pを乗算し、加算器726bはその乗算結果に係数qを加算して位相差ψを出力する。
【0099】
なお、所定の周波数fの範囲についてf=p・ψ+qの関係を満たす周波数fと位相差ψのテーブルを記憶しておき、そのテーブルを用いて位相差演算部725から出力される位相差ψに対応する周波数fを求めるようにしてもよい。
【0100】
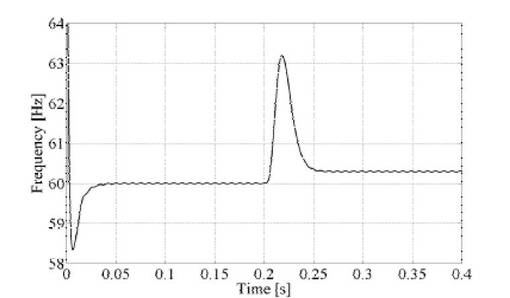
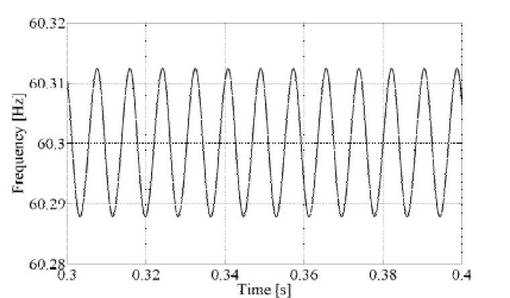
図13は、第1実施形態に係る周波数検出器72で検出される周波数fの応答特性をシミュレーションした結果である。具体的には、電力系統の三相交流電圧の周波数が系統周波数fs=60[Hz]が安定している状態でシミュレーションを開始し、シミュレーション開始から0.2秒後に周波数fsを瞬時的に60.3[Hz]に変化させた場合の周波数検出器72の応答特性を示している。また、図14は、シミュレーション開始から0.3秒後に周波数検出器72から出力される周波数fの変動状態を拡大した図である。入力される三相交流電圧vu,vv,vwに含まれる不平衡成分と5次、7次、11次の高調波成分の含有条件をそれぞれ5%とし、サンプリング周波数を系統周波数fsの数百倍の高周波としている。また、第1複素係数フィルタ部722の通過帯域の中心周波数f0は系統周波数fs=60[Hz]に設定している。
【0101】
図13に示すように、シミュレーション開始から0.2秒後に電力系統の周波数fsを瞬時的に60.0[Hz]から60.3[Hz]に上昇させると、周波数検出器72から出力される周波数fは、電力系統の周波数fsの急変に追従しようとしてパルス状に急変するが、周波数急変時(時刻0.2秒)から凡そ0.05秒後には60.3[Hz]付近に収束することが分かる。また、周波数急変時から0.1秒経過した時(時刻0.3秒)には、図14に示すように、周波数検出器72から出力される周波数fのリップルが±0.01[Hz]程度(変化後の電力系統の周波数fs=60.3[Hz]に対して変動幅は約0.016%)となるので、周波数検出器72は、出力周波数fを周波数急変時(時刻0.2秒)から0.1秒以内には電力系統の変化後の周波数fsに整定することができる。
【0102】
図1に戻り、単独運転検出器73は、周波数検出器72により検出される周波数fの系統周波数fSからの変動量Δf(=f−fS)を演算し、その変動量Δfが予め設定した閾値fthを超えたか否かを判定する。そして、変動量Δfが閾値fthを超えると、単独運転検出器73は、系統連系インバータ装置Aが単独運転状態に移行したとして遮断器5に解列信号を出力する。遮断器5は、単独運転検出器73からの解列信号によって単独運転検出器73と三相電力系統Bとの接続を切断する。
【0103】
以上のように、第1実施形態によれば、複素係数バンドパスフィルタを用いた周波数検出装置によって周波数検出器72を構成しているので、系統電力インバータAの出力電圧の周波数を高い精度で連続的に検出することができ、系統電力インバータAが単独運転状態に移行した時に高速かつ高い精度で系統電力インバータAを三相電力系統Bから切り離すことができる。
【0104】
第1実施形態は、第2複素係数フィルタ部724の複素係数バンドパスフィルタの通過帯域における位相特性の線形性を利用して、当該複素係数バンドパスフィルタの入力信号と出力信号の位相差ψから入力信号の周波数fを求める方法であるが、第2複素係数フィルタ部724の複素係数バンドパスフィルタの複素係数a1を変更可能にし、当該複素係数バンドパスフィルタの入力信号と出力信号の位相差ψに基づいて当該複素係数バンドパスフィルタの中心周波数f0を入力信号の周波数fに一致させるように変化させる制御を行うことで、複素係数バンドパスフィルタの中心周波数f0から入力信号の周波数fを求めてもよい。
【0105】
第2複素係数フィルタ部724の複素係数バンドパスフィルタは、図10に示すように、中心周波数f0では位相差ψがゼロで、中心周波数f0よりも高い周波数領域では位相差ψが負になり、中心周波数f0よりも低い周波数領域では位相差ψが正になるように直線的に変化する特性を有している。従って、位相差ψの正負の符号を見れば、複素係数バンドパスフィルタの入力信号の周波数fが中心周波数f0に対して高い周波数領域にあるのか低い周波数領域にあるのかが分かる。位相特性は直線的に変化するから、ψ<0であれば、位相差ψを監視しながら中心周波数f0を減少させ、ψ>0であれば、中心周波数f0を増加させ、ψ=0であれば、中心周波数f0を変化させないように複素係数a1を制御することで、複素係数バンドパスフィルタの中心周波数f0をψ=0となる周波数、すなわち、入力信号の周波数fに設定することができる。
【0106】
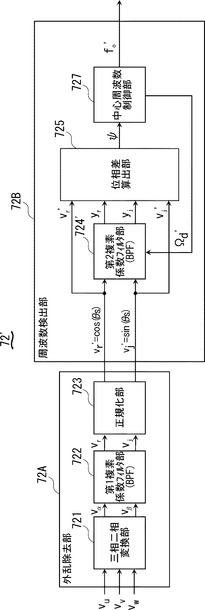
図15は、第2複素係数フィルタ部724の複素係数バンドパスフィルタの複素係数a1を変更可能にし、中心周波数f0を入力信号の周波数fに制御する第2実施形態のブロック構成を示す図である。また、図16は、第2複素係数フィルタ部724’における複素演算処理の回路を示す図である。
【0107】
図15に示す周波数検出器72’は、図3に示す周波数検出器72に対して周波数抽出部72B’の構成が異なる。具体的には、周波数抽出部72B’を、周波数算出部726に代えて位相差算出部15で算出される位相差ψに基づいて中心周波数f0を変更する中心周波数制御部727を設け、第2係数フィルタ部724’の中心周波数f0を決定する複素係数a1を中心周波数制御部727から入力される正規化角周波数Ωd’によって制御する構成としたものである。また、図16に示す複素演算処理回路は、図7に示す複素演算処理回路に対して、中心周波数制御部727から入力される正規化角周波数Ωd’を用いて複素係数a1の実数部の係数arを演算する係数実数部演算回路722mと虚数部の係数ajを演算する係数虚数部演算回路722kを追加したものである。
【0108】
第2実施形態では、中心周波数制御部727が位相差算出部725から入力される位相差ψを「0」と比較し、ψ>0、ψ<0及びψ=0のいずれかの比較結果に応じて第2複素係数フィルタ部724’の正規化角周波数Ωdを変化させる。Ωd=2π・fd、fd=f0/fsrで、fdは第2複素係数フィルタ部724’の中心周波数f0に相当するから、正規化角周波数Ωd’を変化させることにより第2複素係数フィルタ部724’の中心周波数f0が変化することになる。
【0109】
中心周波数制御部727は、位相差算出部725から出力される位相差ψ[rad]に対して、ψ×180/πの演算を行って角度の単位の位相差ψ’[deg]に変換した後、(−K×ψ’/fsr)(K:0〜1の所定のゲイン。例えば、K=0.1、fsr:サンプリング周波数。)の演算を行って変化量ΔΩdを算出し、その変化量ΔΩdをΩds=2π・(fs/fsr)に加算して変化値Ωd’を算出する処理を行う。Ωdsは中心周波数f0を系統周波数fs(例えば、60[Hz])に設定した正規化角周波数である。
【0110】
位相差ψには、(25)式の演算処理でψ<0又は0≦ψに応じて正負の符号が付されるので、変化量ΔΩdの正規化角周波数Ωdsへの加算処理で、ψ<0の場合には変化量ΔΩdを正規化角周波数Ωdsから減算し、0≦ψの場合には変化量ΔΩdを正規化角周波数Ωdsに加算する処理が行われる。なお、上記の正規化角周波数Ωd’を変化させるための演算処理は一例であり、他の演算方法により位相差ψの符号に応じて正規化角周波数Ωd’を増加又は減少させてもよい。
【0111】
中心周波数制御部727で変更設定された正規化角周波数Ωd’=Ωds±ΔΩdは第2複素係数フィルタ部724’にフィードバックされるとともに、正規化角周波数Ωd’に対して(Ωd’×fsr/2π)の演算処理を行って中心周波数の変化値f0’(=fs±Δf)が算出され、その変化値fs’が周波数検出値f0’として出力される。
【0112】
正規化角周波数Ωd’がフィードバックされた第2複素係数フィルタ部724’では、係数実数部演算回路722mで中心周波数制御部17からフィードバックされる正規化角周波数Ωd’を用いて、
ar=r・cos(Ωd’) …(26)
の演算式により複素係数a1の実数部の係数arが算出され、その算出値arが乗算器722aと乗算器722dに入力される。
【0113】
また、係数虚数部演算回路722kで中心周波数制御部17からフィードバックされる正規化角周波数Ωd’を用いて、
aj=r・sin(Ωd’) …(27)
の演算式により複素係数a1の虚数部の係数ajが算出され、その算出値ajが乗算器722bと乗算器722cに入力される。
【0114】
従って、位相差算出部725から入力される位相差ψが「0」でなければ、位相差ψが「0」となる方向に複素係数a1が変化するから、乗算器722eと乗算器722fからは交流電圧検出器8で検出される三相交流電圧vu,vv,vwの基本波成分の周波数、すなわち、系統周波数fsと同一の周波数の電圧ベクトルの実数部の出力データyr[k]と虚数部の出力データyj[k]が出力される。
【0115】
第2実施形態では、中心周波数制御部727から出力される周波数検出値f0’は、周波数検出器72’に入力される三相交流電圧vu,vv,vwの周波数fsが安定していれば、その周波数fsを示し、周波数fsが変動すれば、その変動に追従するように変化し、入力される三相交流電圧vu,vv,vwの周波数fsを示すものとなる。
【0116】
以上のように、第2実施形態でも系統電力インバータAの出力電圧の周波数fsを高い精度で連続的に検出することができ、系統電力インバータAが単独運転状態に移行した時に高速かつ高い精度で系統電力インバータAを三相電力系統Bから切り離すことができる。
【0117】
第2実施形態は、第1複素係数フィルタ部722に複素係数バンドパスフィルタを用いているが、第1複素係数フィルタ部722に複素係数ノッチフィルタを用いて不平衡成分や5次、7次、11次等の高調波成分を除去するようにしてもよい。
【0118】
図17は、第2実施形態の第1複素係数フィルタ部722として複素係数ノッチフィルタを用いる第3実施形態のブロック構成を示す図である。また、図18は、第1複素係数フィルタ部722’に設けられる複素係数ノッチフィルタの多段構成の一例を示す図である。
【0119】
複素係数ノッチフィルタを用いた場合、入力信号の基本波成分の周波数がずれると、それに伴い不平衡成分と高調波成分の周波数もずれるため、複素係数ノッチフィルタの阻止周波数をずらす必要がある。このため、第3実施形態では、中心周波数制御部727から出力される正規化角周波数Ωd’を外乱除去部72A’内の第1複素係数フィルタ部722’にもフィードバックし、複素係数ノッチフィルタの阻止周波数を決定する複素係数を変更するようにしている。
【0120】
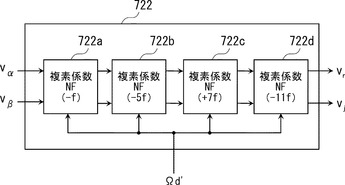
図5に示すように、三相電力系統Bの交流信号には基本波成分(+fs)以外に不平衡成分(−fs)や5次、7次、11次の高調波成分(−5fs,+7fs,−11fs)が含まれることが分かっているので、図17に示す第1複素係数フィルタ部722’は、それらの周波数毎にz変換表現による伝達関数H(z)が下記の(28)式で表される複素係数ノッチフィルタを設け、それらを多段に接続することによって図19に示す周波数特性を有する複素係数ノッチフィルタを構成している。
【0121】
【数3】
【0122】
なお、Ωdは、Ωd=2π・(n・fs/fsr)であり、n=−1に設定すると、不平衡成分(−fs)を阻止周波数とする複素係数ノッチフィルタとなる。また、n=−5、n=+7、n=−11に設定すると、それぞれ5次、7次、11次の高調波成分を阻止周波数とする複素係数ノッチフィルタとなる。従って、第1複素係数フィルタ部722’は、図18に示すように、−fs、−5fs、+7fs、−11fsを阻止周波数とする複素係数ノッチフィルタ722a,722b,722c,722dを縦続接続した構成となっている。
【0123】
また、上記(28)式の演算処理を行う処理回路のブロック図は、図20に示す構成となり、複素係数ノッチフィルタ(NF)を用いた複素係数フィルタ部12の複素演算処理を行う回路は、図21に示す構成となる。
【0124】
図20は、図6に示すブロック図に対して、入力データu[k]からデータy[k]を減算し、その減算値を出力データe[k]として出力する回路を追加したものである。また、図21は、図16に示すブロック図に対して、係数実数部演算回路722mと係数虚数部演算回路722kを不平衡成分又は高調波成分の周波数を中心周波数とする係数arを演算する係数実数部演算回路722m’と係数ajを演算する係数虚数部演算回路722k’に変更している。そして、実数部の乗算器722eの後段に加算器722nを追加し、当該加算器722nで入力データの実数部ur[k]からデータy[k]の実数部yr[k]を減算して出力データの実数部er[k]を出力する構成としている。また、虚数部の乗算器722fの後段に加算器722oを追加し、当該加算器722oで入力データの虚数部uj[k]からデータy[k]の虚数部yj[k]を減算して出力データの虚数部ej[k]を出力する構成としている。
【0125】
係数実数部演算回路722m’では、中心周波数制御部727からフィードバックされる正規化角周波数Ωd’を用いて、
ar=r・cos(n・Ωd’) …(29)
の演算式により複素係数a1の実数部の係数arが算出され、その算出値arが乗算器722aと乗算器722dに入力される。
【0126】
また、係数虚数部演算回路722k’では、中心周波数制御部727からフィードバックされる正規化角周波数Ωd’を用いて、
aj=r・sin(n・Ωd’) …(30)
の演算式により複素係数a1の虚数部の係数ajが算出され、その算出値ajが乗算器722bと乗算器722cに入力される。
【0127】
なお、nは、阻止周波数の次数を示し、図18に示された複素係数ノッチフィルタ722aではn=−1、複素係数ノッチフィルタ722b,722c,722dではそれぞれn=−5,+7,−11となる。
【0128】
図21に示す回路は、図16に示す回路に対して、上述した係数実数部演算回路722m’及び係数虚数部演算回路722k’の演算内容の他は、加算器722n,722oでの減算処理が追加された点が異なるだけであるから、図21に示す回路の演算処理の詳細説明は省略する。
【0129】
第3実施形態に係る周波数検出器72”では、複素係数ノッチフィルタ722a〜722dによって不平衡成分(−fsの成分)や高調波成分(−5fs,+7fs,−11fsの成分)のレベルがそれぞれ抑制されるので、これらの成分が周波数抽出部72B’に入力されることを好適に阻止することができる。従って、第3実施形態に係る周波数検出器72”では安定かつ高い精度で三相電力系統Bの三相電圧の周波数fsを検出することができる。
【0130】
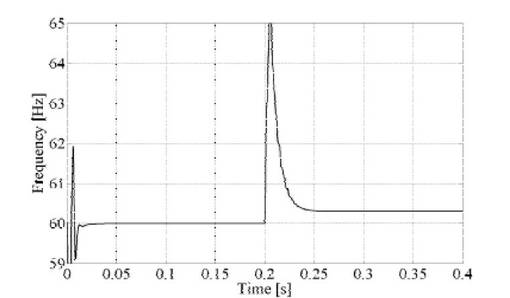
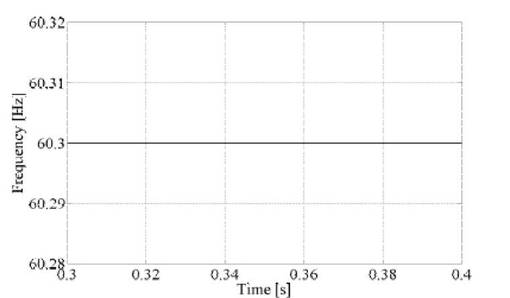
図22は、第3実施形態に係る周波数検出部72”で検出される周波数fの応答特性をシミュレーションした結果である。また、図23は、シミュレーション開始から0.3秒後に周波数検出器72”から出力される周波数fの変動状態を拡大した図である。シミュレーションの条件は、図13,図14に示すシミュレーション結果と同じである。
【0131】
図22に示すように、第3実施形態の場合もシミュレーション開始から0.2秒後に電力系統の周波数fsを瞬時的に60.0[Hz]から60.3[Hz]に上昇させると、周波数検出器72”から出力される周波数fはパルス状に急変するが、周波数急変時(時刻0.2秒)から凡そ0.05秒後にはほぼ60.3[Hz]に収束することが分かる。また、第3実施形態では、周波数急変時から0.1秒経過した時(時刻0.3秒)には、図23に示すように、周波数検出器72”から出力される周波数fのリップルはなく、第1実施形態よりも高速かつ高精度に三相電力系統Bの三相電圧の周波数fsを検出することができることが分かる。
【0132】
以上のように、第3実施形態によれば、複素係数ノッチフィルタを用いた周波数検出装置によって周波数検出部器72”を構成しているので、系統電力インバータAの出力電圧の周波数を第1,第2実施形態よりも高速で検出することができ、系統電力インバータAが単独運転状態に移行した時に第1,第2実施形態よりも高速で系統電力インバータAを三相電力系統Bから切り離すことができる。
【0133】
なお、第1複素係数フィルタ部722には複素係数バンドパスフィルタ又は複素係数ノッチフィルタのいずれを用いてもよいが、好ましくは複素係数バンドパスフィルタよりも複素係数ノッチフィルタを用いたほうが高速かつ高精度の位相検出特性を得ることができる。また、複素係数ノッチフィルタと複素係数バンドパスフィルタとを組み合わせれば、両者の特性の相乗効果を期待することができ、より高速かつ高精度の位相検出特性を得ることができる。
【0134】
また、周知のように、複素係数ノッチフィルタ及び複素係数バンドパスフィルタを多段構成とすれば、急峻なフィルタ特性とすることができるとともに、不平衡成分や高調波成分の除去特性と応答性を容易に調整できるので、実装する場合は適当な段数の多段構成にするとよい。
【0135】
第1実施形態に係る周波数検出器72では、第1複素係数フィルタ部722を複素係数バンドパスフィルタで構成する場合について説明したが、第3実施形態のように第1複素係数フィルタ部722を複素係数ノッチフィルタで構成してもよい。但し、この場合は、第3実施形態で説明したように、複素係数ノッチフィルタの阻止周波数を周波数算出部16で算出される周波数fに対して−f,−5f,7f,−11fの周波数に制御する必要がある。従って、この場合は、位相差算出部15の後段に正規角周波数の変化値Ωd’を算出する演算処理部を設け、その演算処理部で算出した正規角周波数の変化値Ωd’を複素係数ノッチフィルタで構成した第1複素係数フィルタ部722’にフィードバックさせるようにするとよい。
【0136】
また、第1実施形態の第1複素係数フィルタ部722を複素係数ノッチフィルタで構成する場合にはその複素係数ノッチフィルタに複素係数バンドパスフィルタを組み合わせた構成にして不平衡成分や高調波成分の除去効果を高めるようにしてもよい。この場合は、複素係数バンドパスフィルタの中心周波数を固定にしてもよいが、複素係数バンドパスフィルタの中心周波数を可変にし、複素係数ノッチフィルタの周波数を制御する機構(例えば、上記の正規角周波数の変化値Ωd’を算出する演算処理部)を利用して複素係数バンドパスフィルタの中心周波数を制御するようにしてもよい。
【0137】
また、第1実施形態の第1複素係数フィルタ部722を中心周波数が可変の複素係数バンドパスフィルタだけにしてもよい。この場合は、三相電力系統Bの系統周波数fsの変化に応じて複素係数バンドパスフィルタの中心周波数f0を変化させる構成を設ける必要がある。
【0138】
また、第2実施形態では、第1複素係数フィルタ部722の複素係数バンドパスフィルタの中心周波数f0を固定としたが、第2実施形態でも複素係数バンドパスフィルタの中心周波数f0を可変にし、三相電力系統Bの周波数fsの変化に応じて複素係数バンドパスフィルタの中心周波数f0を変化させる構成としてもよく、その複素係数バンドパスフィルタに第3実施形態の複素係数ノッチフィルタを組み合わせた構成としてもよい。これらの場合は、第2複素係数フィルタ部724’の中心周波数f0を制御する構成を利用して第1複素係数フィルタ部722の複素係数バンドパスフィルタの中心周波数や複素係数ノッチフィルタの阻止周波数を制御するようにすればよい。もちろん、中心周波数固定の複素係数バンドパスフィルタに複素係数ノッチフィルタを組み合わせた構成としてもよい。
【0139】
上記実施形態では、QCモード周波数シフト方式の単独運転検出装置について説明したが、本発明は、スリップモード周波数シフト方式等の他の周波数シフト方式の単独運転検出装置にも適用できる。例えば、スリップモード周波数シフト方式では、図1の周波数変化率演算部71Aを除去し、周波数検出器72で検出された周波数を用いて無効電力変動値生成部71Bで無効電力目標値Qoの変動値ΔQを設定するようにすればよい。また、周波数検出器72に複素係数フィルタを用いて周波数検出を行う周波数検出装置を用いる本発明は、周波数を検出し、その周波数の変動量を用いて単独運転検出を行う方式であれば、周波数シフト方式以外の他の方式にも広く適用することができる。
【0140】
また、上記の説明では電力系統Bが三相電力系統の場合について説明したが、電力系統Bが単相電力系統の場合にも本発明が適用できることは言うまでもない。この場合は、図3、図15、図17に示すブロック図において、三相/二相変換部721を除いた構成にすればよい。
【0141】
単相の場合は、単相交流電圧vが1つしかないので、その単相交流電圧vのサンプリングデータが入力データの実数部ur[k]として第1複素係数フィルタ部722に入力され、入力データの虚数部uj[k]には「0」が入力される。なお、図3、図15、図17に示す周波数検出器72,72’において、三相/二相変換部721を除去し、U,V,Wのいずれかの相の交流電圧vのサンプリングデータを入力データの実数部ur[k]として第1複素係数フィルタ部722に入力し、入力データの虚数部uj[k]には「0」を入力するようにしてもよい。
【0142】
複素係数フィルタを用いた第1複素係数フィルタ部722では、単相交流電圧が入力された場合でも三相交流電圧の場合と同様に互いに直交する二相交流電圧vr,vj(正弦波と余弦波の信号)が出力されるので、第1複素係数フィルタ部722,722’、正規化部723及び周波数抽出部72B,72B’,72B”は、図3、図15、図17に示す三相用の周波数検出器72,72’,72B”と同様の構成で実現することができる。
【符号の説明】
【0143】
A 系統連系インバータ装置
B 三相電力系統
1 直流電源
2 インバータ
3 フィルタ
4 変圧器
5 遮断器
6 制御装置
6a バス電圧目標値生成部
6b 無効電力目標値生成部
6c 無効電力算出部
6d uvw−dq変換部
6e,6f,6g,6h PI補償部
6i,6j 非干渉化部
6k dq−uvw変換部
6m PWM信号生成部
7 単独運転検出装置
71 無効電力変動制御器
71A 周波数変化率演算部
71B 無効電力変動値生成部
72,72’,72” 周波数検出器
72A 外乱除去部
721 三相/二相変換部
722,722’ 第1複素係数フィルタ部
723 正規化処理部
72B,72B’ 周波数抽出部
724,724’ 第2複素係数フィルタ部
725 位相差算出部
726 周波数算出部
73 単独運転検出器
8 交流電圧検出器
【技術分野】
【0001】
本発明は、電力系統に連系される系統連系インバータ装置の単独運転を検出する単独運転検出装置に関するものである。
【背景技術】
【0002】
電力系統に接続される分散型電源には、逆潮流有りの条件で高圧配電系統に連系する場合、単独運転を防止するために単独運転検出装置が設けられる。そして、分散電源の単独運転状態を検出する方式として、周波数変化率検出方式、QCモード周波数シフト方式、スリップモード周波数シフト方式、有効電力変動方式、無効電力変動方式等の単独運転時に発生する周波数変動を検出することによって単独運転を検出する種々の方式が知られている。周波数変化率検出方式は受動的な方式であるが、スリップモード周波数シフト方式、QCモード周波数シフト方式、有効電力変動方式、無効電力変動方式は能動的な方式である。
【0003】
周波数変化率検出方式は、分散型電源の出力と負荷の不平衡に起因する分散型電源の出力周波数の急変を検出する方式である。スリップモード周波数シフト方式は、単独運転時に無効電力負荷のC(キャパシタンス)成分が大きければ分散型電源の出力周波数が上昇し、L(インダクタンス)成分が大きければ、分散型電源の出力周波数が低下する特性を利用し、分散型電源の出力周波数が基準の周波数から変動するときにはその出力周波数の変動量を増幅して検出する方式である。具体的には、PCS(Power Conditioning System)に周波数−位相特性を持たせて、分散型電源の出力周波数が基準の周波数に対して上昇するときにはPCSの出力電流の位相を進めて正帰還により出力周波数の上昇を加速させ、分散型電源の出力周波数が基準の周波数に対して低下するときにはPCSの出力電流の位相を遅らせて正帰還により出力周波数の低下を加速させることによりその出力周波数の変動量を増幅し、その変動量によって単独運転を検出する方式である。
【0004】
QCモード周波数シフト方式は、スリップモード周波数シフト方式と同様に上記の周波数特性を利用するものであるが、出力周波数ではなく出力周波数の変化率を正帰還させることによってPCSの出力電流の位相を増幅させる方式である。
【0005】
有効電力変動方式は、PCSの出力に周期的な有効電力の変動を与え、PCSの出力電圧、出力電流、出力周波数の変動量に基づいて単独運転の有無を検出する方式である。また、無効電力変動方式は、PCSの出力に周期的な無効電力の変動を与え、PCSの出力電圧、出力電流、出力周波数の変動量に基づいて単独運転の有無を検出する方式である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−41820号公報
【特許文献1】特開平2000−358331号公報
【特許文献2】特開平2002−281674号公報
【特許文献3】特開平2007−252127号公報
【特許文献4】特開平2011−30306号公報
【特許文献5】特開平2006−25550号公報
【0007】
【非特許文献1】「電力系統事故時の異常電圧に対処したPLLおよび周波数検出方式」 電学論B,118巻9号,平成10年
【発明の概要】
【発明が解決しようとする課題】
【0008】
系統連系インバータ装置を用いた分散型電源では、単独運転状態を検出したときには、例えば、1秒以内に系統連系インバータ装置を需要家(負荷)から切り離すか、運転を停止させることが要望されている。上記の単独運転検出方式で検出パラメータとして分散型電源の出力周波数を用いる方式では、高速かつ高精度の周波数検出装置が必要になる。
【0009】
その一方、分散型電源の出力周波数を検出する方法として、分散型電源から出力される交流電圧の瞬時値を検出し、その検出値がゼロレベルを交差する点(ゼロクロス点)間の時間を計測することにより分散型電源の出力周波数を検出する方式(ゼロクロス点間カウント方式)が知られている(特許文献6参照)。また、非特許文献1には、乗算式PLL(Phase Locked Loop)を用いて分散型電源から出力される交流電圧の位相を検出する位相検出装置を用いてその交流電圧の周波数を求める方式が提案されている。
【0010】
従来のゼロクロス点間カウント方式による周波数検出装置では、検出電圧のサンプリング値がゼロクロス点を検出するタイミングでしか周波数の算出処理ができないので、例えば、検出電圧をサンプリングする毎に周波数を検出するというような連続的な周波数の検出処理ができない。このため、周波数検出ができない期間に、電力系統の位相が急変したり、地絡事故により電圧不足が生じたりすると、周波数を正確に検出することができない(即応性や検出精度が良くない)という問題がある。
【0011】
また、三相の電力系統の周波数(以下、「系統周波数」という。)には、基本波正相成分(以下、単に「基本波成分」という。)の他に低次の高調波成分(例えば、5次,7次,11次の高調波成分。以下、単に「高調波成分」という。)や基本波逆相成分(以下、「不平衡成分」という。)が含まれることが多く、これらの成分が検出電圧に含まれていると、検出電圧の波形が正確に基本波成分の波形にならず(波形歪が生じ)、これにより基本波成分のゼロクロス点を正確に検出できず、周波数の検出精度が低下するという問題もある。
【0012】
一方、乗算式PLL方式の位相検出装置を用いて周波数を検出する方法は、分散型電源から出力される交流信号の周波数を直接検出するものではないので、検出精度の面で問題がある。PLLを用いた位相検出装置は、装置内で位相を生成し、その位相と入力される交流信号の位相との位相差を算出し、その位相差がゼロとなるように生成位相を制御することによって入力される交流信号の位相を検出するものであるから、位相差が生じた場合は、位相検出装置内で生成される位相が検出対象の位相からずれることになる。従って、位相検出装置内で生成される位相から周波数を算出する方法では、系統周波数が変動した場合の検出精度や応答速度の点で問題が生じる。
【0013】
従って、ゼロクロス点間カウント方式を用いた周波数検出装置を単独運転検出装置に適用する場合、検出の連続性や検出精度などの点で問題がある。また。乗算式PLL方式の位相検出装置を用いて周波数を検出する方法を単独運転検出装置に適用する場合も検出精度や応答速度の点で問題が生じる。
【0014】
本発明は、上記した事情のもとで考え出されたものであって、高速かつ高精度に系統連系インバータ装置の単独運転状態を検出することができる単独運転検出装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
請求項1に記載の系統連系インバータ装置の単独運転検出装置は、少なくとも電力系統に連系される系統連系インバータ装置から出力される交流信号の周波数を検出する周波数検出手段と、前記周波数検出手段の検出値に基づいて前記系統連系インバータ装置が単独運転状態に移行したことを検出する単独運転検出手段とを備える、系統連系インバータ装置の単独運転検出装置において、前記周波数検出手段は、前記交流信号を検出する交流信号検出手段と、前記交流信号検出手段で検出された前記交流信号に含まれる不平衡成分と高調波成分を除去し、基本波成分だけを出力する複素係数フィルタからなる第1のフィルタ手段と、前記第1のフィルタ手段から出力される前記交流信号の基本波成分を用いて当該基本波成分の周波数を算出する周波数算出手段と、を含むことを特徴とする。
【0016】
請求項1に記載の系統連系インバータ装置の単独運転検出装置において、前記第1のフィルタ手段の複素係数フィルタは、中心周波数が前記交流信号の周波数に設定された複素係数バンドパスフィルタであるとよい(請求項2)。
【0017】
また、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置において、前記周波数算出手段は、中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、前記第2のフィルタ手段に入力される前記交流信号の基本波成分と前記第2のフィルタ手段から出力される前記交流信号の基本波成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記交流信号の基本波成分の位相差を算出する位相差演算手段と、前記位相特性に基づき前記通過帯域における位相差から周波数を求めるための所定の関係式と前記位相差とを用いて、前記第2のフィルタ手段に入力された前記交流信号の基本波成分の周波数を演算する周波数演算手段と、を含む構成にするとよい(請求項3)。
【0018】
また、前記周波数算出手段は、中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、前記第2のフィルタ手段に入力される前記交流信号の基本波成分と前記第2のフィルタ手段から出力される前記交流信号の基本波成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記交流信号の基本波成分の位相差を算出する位相差演算手段と、前記位相特性に基づき予め設定された前記通過帯域における位相差と周波数との関係を示す所定のテーブルと、前記テーブルから前記位相差算出手段で算出された位相差に対応する周波数を読み出すことにより、前記第2のフィルタ手段に入力された前記交流信号の基本波成分の周波数を算出する周波数演算手段と、を含む構成にするとよい(請求項4)。
【0019】
また、前記周波数算出手段は、位相差が中心周波数では零で、当該中心周波数より大きい周波数領域では負になり、小さい周波数領域では正になる位相特性を有し、かつ、前記中心周波数が変更可能な通過帯域型の複数係数フィルタからなる第2のフィルタ手段と、前記第2のフィルタ手段に入力される前記交流信号の基本波成分と前記第2のフィルタ手段から出力される前記交流信号の基本波成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記交流信号の基本波成分の位相差を算出する位相差演算手段と、前記位相差算出手段で算出される位相差が正の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を所定の変化量で低下させ、前記位相差算出手段で算出される位相差が負の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を前記変化量で上昇させ、変化後の中心周波数を周波数の検出値として出力する中心周波数制御手段と、を含む構成にするとよい(請求項5)。
【0020】
請求項5に記載の系統連系インバータ装置の単独運転検出装置において、前記第1のフィルタ手段の複素係数フィルタは、前記中心周波数制御手段から出力される中心周波数に基づいて、当該中心周波数に対して負の周波数成分と所定次数の高調波成分となるように阻止周波数が制御される複数係数ノッチフィルタであるとよい(請求項6)。
【0021】
また、請求項1乃至6のいずれかに記載の系統連系インバータ装置の単独運転検出装置において、前記系統連系インバータ装置は、当該系統連系インバータ装置から出力される無効電力量を制御する電力メジャーループを有しており、前記周波数検出手段で検出される前記交流信号の周波数に基づいて、前記無効電力量を揺動させる無効電力変動値を生成し、前記電力メジャーループにフィードバックする無効電力変動値生成手段を更に備え、前記単独運転検出手段は、前記周波数検出手段で検出される周波数の変動量を算出し、その変動量が所定の閾値を超えることにより前記系統連系インバータ装置が単独運転状態に移行したことを検出するとよい(請求項7)。
【0022】
なお、請求項7に記載の系統連系インバータ装置の単独運転検出装置において、前記無効電力変動値生成手段は、前記周波数検出手段で検出される前記交流信号の周波数を用いて周波数変化率を算出し、その周波数変化率に比例して変動する前記無効電力変動値を生成するとよい(請求項8)。
【0023】
また、請求項1乃至8のいずれかに記載の系統連系インバータ装置の単独運転検出装置において、前記交流信号は、単相若しくは三相の交流信号である(請求項9)。
【発明の効果】
【0024】
本発明によれば、系統連系インバータ装置から出力される交流信号の検出値を複素係数フィルタに通すことによって不平衡成分と高調波成分を除去し、基本波成分のみを抽出した後、その基本波成分の周波数を算出するので、交流信号の周波数を高速かつ高精度に検出することができる。従って、簡単な構成で系統連系インバータ装置の単独運転を高速かつ高い精度で検出することができる。
【0025】
特に、複素係数フィルタとして複素係数ノッチフィルタを用いると、複素係数フィルタとしてバンドパスフィルタを用いた場合よりも不平衡成分や高調波成分を好適に除去することができ、より高速かつ高い精度で交流信号の周波数を検出することができる。
【0026】
また、系統連系インバータ装置から出力される交流信号の周波数を検出し、その周波数の変動に基づいて単独運転を検出する方式であれば、受動的な方式と能動的な方式とに関係なく、高い精度で高速に系統連系インバータ装置の単独運転を検出することができる。また、電力系統が単相電力系統と三相電力系統とに関係なく、高い精度で高速に系統連系インバータ装置の単独運転を検出することができる。
【図面の簡単な説明】
【0027】
【図1】本発明に係る単独運転検出装置を備えた系統連系インバータ装置の構成を示す図である。
【図2】制御装置内のPWM信号を生成するための処理の基本構成を示すブロック図である。
【図3】周波数検出部の第1実施形態のブロック構成を示す図である。
【図4】三相交流電圧の基本波成分と不平衡成分の関係を説明するための図である。
【図5】複素係数バンドパスフィルタを用いた複素係数バンドパスフィルタの周波数特性を示す図である。
【図6】複素係数バンドパスフィルタを用いた第1複素係数フィルタ部の演算処理を示すブロック図である。
【図7】複素係数バンドパスフィルタを用いた第1複素係数フィルタ部の複素演算処理を行う回路構成を示す図である。
【図8】不平衡成分と5次、7次、11次の高調波成分を含む三相交流電圧の波形を示す図である。
【図9】図8に示す三相交流電圧を複素係数フィルタ部でフィルタリングした三相交流電圧の波形を示す図である。
【図10】第2複素係数フィルタ部の通過帯域における位相特性の一例を示す図である。
【図11】位相差算出部の演算処理を行う回路構成を示す図である。
【図12】周波数算出部の演算処理を行う回路構成を示す図である。
【図13】第1実施形態に係る周波数検出器の応答特性をシミュレーションした結果を示す図である。
【図14】図13に示すシミュレーション結果のシミュレーション開始から0.3秒後に周波数検出器から出力される周波数の変動状態を拡大した図である。
【図15】周波数検出器の第2実施形態のブロック構成を示す図である。
【図16】第2実施形態の周波数検出器における第2複素係数フィルタ部の複素演算処理を行う回路構成を示す図である。
【図17】本発明に係る周波数検出器の第3実施形態のブロック構成を示す図である。
【図18】第3実施形態の周波数検出器における第1複素係数フィルタ部に設けられる複素係数ノッチフィルタの多段構成を示す図である。
【図19】複素係数ノッチフィルタを用いた第1複素係数フィルタ部の周波数特性を示す図である。
【図20】複素係数ノッチフィルタを用いた第1複素係数フィルタ部の演算処理を示すブロック図である。
【図21】複素係数ノッチフィルタを用いた第1複素係数フィルタ部の複素演算処理を行う回路構成を示す図である。
【図22】第3実施形態に係る周波数検出器の応答特性をシミュレーションした結果を示す図である。
【図23】図22に示すシミュレーション結果のシミュレーション開始から0.3秒後に周波数検出器から出力される周波数の変動状態を拡大した図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施の形態を、添付図面を参照して具体的に説明する。
【0029】
図1は、本発明に係る単独運転検出装置を備えた系統連系インバータ装置の構成を示す図である。図2は、制御装置6内のPWM信号を生成するための処理の基本構成を示すブロック図である。電力系統には一般に三相電力系統と単相電力系統が含まれるが、本実施形態では電力系統Bを三相電力系統とし、系統連系インバータ装置Aは電力を三相交流で電力系統Bに出力する三相インバータ装置として説明する。
【0030】
系統連系インバータ装置Aは、直流電源1で生成される直流電力をインバータ2で交流電力に変換し、インバータ2で生じるスイッチングノイズをフィルタ3で除去し、変圧器4で出力レベルを調整した後、遮断器5を介して電力系統Bに出力する基本的な構成を有するインバータである。系統連系インバータ装置Aは、インバータ2の出力電力を制御する制御装置6と、系統連系インバータ装置Aが単独運転状態となったか否かを監視し、単独運転状態になったことを検出すると、遮断器5を開いて系統連系インバータ装置Aを解列させる単独運転検出装置7を備える。
【0031】
制御装置6は、系統連系インバータ装置Aを電力系統Bに連系させるために、フィードバック制御により系統連系インバータ装置Aから出力される交流電圧を制御する。一方、単独運転検出装置7は、後述するように系統連系インバータ装置Aから出力される交流電圧の周波数fを検出し、その検出値を用いて系統連系インバータ装置Aが単独運転状態になったことを検出する。制御装置6のフィードバック制御のために系統連系インバータ装置Aの出力ラインの適所には系統連系インバータ装置Aから出力される交流電流と交流電圧を検出する検出器が設けられるが、図1では省略し、単独運転検出装置7が系統連系インバータ装置Aの出力電圧の周波数fを検出するための交流電圧検出器8だけを記載している。
【0032】
直流電源1は、例えば、太陽光発電、太陽熱発電、風力発電等によって生成される電気エネルギーを直流で出力する電源や燃料電池等の電池電源である。直流電源1には光エネルギー、機械エネルギー、熱エネルギー等の任意のエネルギーを直流出力する電源装置を適用することができるが、以下の説明では、直流電源1として太陽電池を用いた例で説明する。
【0033】
インバータ2は、例えば、6個のスイッチング素子(IGBT(Insulated Gate Bipolar Transistor)やMOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)やGTO(Gate Turn-Off thyristor)などの半導体スイッチング素子)をブリッジ接続したフル・ブリッジ回路で構成される電圧制御型インバータである。フル・ブリッジ回路は、2個のスイッチング素子を直列に接続した3個の直列回路(アーム)を一対の電源ラインに並列に接続し、各アームの接続点を出力端子とする周知の回路である。
【0034】
各アームの一対のスイッチング素子は、制御装置4から入力される1組のパルス幅変調信号(PWM信号)によってそれぞれオン・オフ動作が制御される。各アームに入力される1組のPWM信号は、相互に位相が反転したPWM信号である。また、3個のアームに入力される3組のPWM信号は、パルス波形は同一であるが、位相が互いに2π/3ずつずれている。インバータ2は、3組のPWM信号によって3個のアームの接続点の相対的な電圧が順番に切り替えられ、これにより直流電源1から入力される直流電圧が三相交流電圧に変換されて3個のアームの接続点から出力する。
【0035】
フィルタ3は、インバータ2におけるスイッチング素子のスイッチング動作により三相交流電圧に含まれる高周波スイッチングノイズを除去する。フィルタ3は、リアクトルとコンデンサのL字型回路からなるローパスフィルタで構成される。変圧器4は、三相トランスで構成され、フィルタ3から出力される交流電圧を電力系統Bの系統電圧とほぼ同一のレベルに昇圧または降圧する。
【0036】
遮断器5は、例えば、電磁開閉器で構成される。遮断器5は、単独運転検出装置7から系統連系インバータ装置Aの単独運転状態を検出した検出信号が出力されると、開動作を行い、系統連系インバータ装置Aと電力系統Bとの接続を切断する。なお、遮断器5は制御装置6によっても制御され、系統連系インバータ装置Aの運転異常などのときには制御装置6が遮断器5によって系統連系インバータ装置Aと電力系統Bとの接続を切断するが、図1ではその構成は省略している。
【0037】
制御装置6は、マイクロコンピュータ若しくはFPGA(Field-Programmable Gate Array)により構成され、ディジタル演算処理によりPWM信号の生成処理を行う。制御装置6は、U,V,Wの各相について、インバータ2の出力電圧の制御目標vuo,vvo,vwo(フィルタ3を通過した正弦波の交流電圧)を変調波として生成し、その制御目標vuo,vvo,vwoを搬送波である所定の三角波vtと比較することによりPWM信号を生成する。
【0038】
U相の制御目標vuoは、インバータ2の出力電流iuがインバータ2と電力系統Bとの間のインピーダンス(主としてフィルタ3と変圧器4のリアクトルによるインピーダンス。以下、「連系用リアクトル」という。)を流れることによる電圧降下分の電圧を系統電圧にベクトル合成した電圧の振幅に相当する。系統電圧は電力系統Bにより制御されるので、制御装置6は、連系用リアクトルの電圧を制御することにより制御目標vuoを制御する。連系用リアクトルはフィルタ3及び変圧器4の設計値として固定されるから、連系用リアクトルの電圧は、インバータ2の出力電流iuにより制御される。従って、制御装置6は、実質的にインバータ2出力電流iuを制御することによって制御目標vuoを制御する。V相,W相の制御目標vvo,vwoについても同様である。
【0039】
図2に示す制御装置6内のバス電圧目標値生成部6a、無効電力目標値生成部6b、無効電力算出部6c、uvw−dq変換部6d、PI補償部6e,6f,6g,6h、非干渉化部6i,6j、dq−uvw変換部6kは電力メジャーループにより出力電圧の制御目標vuo,vvo,vwoを生成するための処理ブロックである。点線で囲まれたブロック(uvw−dq変換部6d、PI補償部6g,6h、非干渉化部6i,6j及びdq−uvw変換部6kによる処理部分)は電流マイナーループを構成する部分である。また、PWM信号生成部6mは、制御目標vuo,vvo,vwoと三角波vtを比較してPWM信号を生成する処理ブロックである。なお、dq−uvw変換部6kの前段若しくは後段に系統電圧対抗分を加算する処理ブロックが設けられるが、図2ではその処理ブロックを省略している。
【0040】
制御装置6は、dq回転座標系(電力系統Bの周波数で回転する座標系)でインバータ2の出力電流の制御目標Ido,Iqoを生成する。すなわち、制御装置6は、バス電圧目標値生成部6aでインバータ2に入力される直流電圧(以下、「バス電圧」という。)の基準値Vrefを設定し、そのバス電圧基準値Vrefに対する直流電圧計8で実測されるバス電圧Vdcの偏差ΔVdc=Vref−Vdcを求め、その偏差ΔVdcにPI補償部6eで所定のPI補償演算をしてdq回転座標系におけるインバータ2の出力電流の制御基準のd軸成分Idrefを設定する。
【0041】
また、制御装置6は、無効電力目標値生成部6bで生成される無効電力目標値Qo(力率1の運転時ではQo=0)に後述する単独運転検出装置7から入力される無効電力変動値ΔQを加算して単独運転検出用の無効電力目標値Qo’=Qo+ΔQを設定する。無効電力変動値ΔQは、系統連系インバータ装置Aが単独運転状態に移行したことを検出するためにインバータ2から出力される無効電力Qoを能動的に変動させるための変動値である。
【0042】
制御装置6は、交流電圧計9で実測されるインバータ2の出力電圧vu,vv,vw及び交流電流計10で実測されるインバータ2の出力電流iu,iv,iwを用いて無効電力演算部6cでインバータ2から出力される無効電力Qrを算出し、単独運転検出用の無効電力目標値Qo’に対する無効電力算出値Qrの偏差ΔQ=Qo’−Qrを求める。そして、PI補償部6fでその偏差ΔQに所定のPI補償演算をしてdq回転座標系におけるインバータ2の出力電流の制御基準のq軸成分Iqrefを設定する。
【0043】
制御装置6は、交流電流計10で検出したインバータ2の出力電流iu,iv,iwをuvw−dq変換部6dで、
Id=√(2/3)・(iu・cos(θ)+iv・cos(θ−2π/3)+iw・cos(θ−4π/3))
Iq=√(2/3)・(−iu・sin(θ)−iv・sin(θ−2π/3)−iw・sin(θ−4π/3))
但し、θ=2πfs・t(fs:系統周波数)
のuvw−dq座標変換式によりdq回転座標系のd軸成分Idとq軸成分Iqに変換し、制御基準Idref,Iqrefに対する実測値のdq回転座標系におけるdq軸成分Id,Iqの偏差ΔId=Idref−Id,ΔIq=Iqref−Iqをそれぞれ算出する。
【0044】
制御装置6は、PI補償部6gで偏差ΔIdに所定のPI補償演算をするとともに、実測値のdq回転座標系におけるq軸成分Iqにフィルタ3のインピーダンス成分ωLを乗じて干渉量を演算し、その演算値を偏差ΔIdのPI補償演算値に加算してdq回転座標系におけるインバータ2の出力電流の制御目標のd軸成分Idoを設定する。また、制御装置6は、PI補償部6hで偏差ΔIqに所定のPI補償演算をするとともに、実測値のdq回転座標系におけるd軸成分Idにフィルタ3のインピーダンス成分ωLを乗じて干渉量を演算し、その演算値を偏差ΔIqのPI補償演算値から減算してdq回転座標系におけるインバータ2の出力電流の制御目標のq軸成分Iqoを設定する。
【0045】
そして、制御装置6は、その制御目標Ido,Iqoに図略の系統電圧対抗分をそれぞれ加算してdq回転座標系におけるインバータ2の出力電圧の制御目標のdq軸成分Vdo,Vqoを算出し、その制御目標Vdo,Vqoをdq−uvw変換部6kで、
vuo=[√(2/3)]・[Vdo・cos(θ)−Vqo・sin(θ)]
vvo=[√(2/3)]・[Vdo・cos(θ−2π/3)−Vqo・sin(θ−2π/3)]
vwo=[√(2/3)]・[Vdo・cos(θ−4π/3)−Vqo・sin(θ−4π/3)]
のdq−uvw座標変換式により静止座標系における三相電圧に変換することで、U,V,Wの各相の制御目標vuo,vvo,vwoを生成する。
【0046】
そして、制御装置6は、PWM信号生成部6mで制御目標vuo,vvo,vwoのレベルをそれぞれ三角波vtのレベルと比較し、比較結果に応じたレベルのパルス信号を生成することでU,V,Wの各相に対するPWM信号を生成する。各相に対するPWM信号はインバータ2の各アームのスイッチング素子に入力される。
【0047】
単独運転検出装置7は、QCモード周波数シフト方式により系統連系インバータ装置Aが単独運転状態となったか否かを検出する。QCモード周波数シフト方式は、上記したように、系統連系インバータAの出力周波数が基準の周波数(系統周波数)に対して上昇するときには系統連系インバータAの出力電流の位相を進めて正帰還により出力周波数の上昇を加速させ、系統連系インバータAの出力周波数が基準の周波数(系統周波数)に対して低下するときには系統連系インバータAの出力電流の位相を遅らせて正帰還により出力周波数の低下を加速させることによりその出力周波数の変動量を増幅し、その変動量によって単独運転を検出する方式である。
【0048】
系統連系インバータAの出力電流の位相は無効電力量を制御することにより制御されるから、単独運転検出装置7は、系統連系インバータAから出力される交流電流の周波数の変化率を検出し、その検出値に基づいて無効電力目標値Qoを変動させる変動値ΔQを設定し、制御装置6にフィードバックする。
【0049】
従って、単独運転検出装置7は、周波数変化率演算部71Aと無効電力変動値生成部71Bを含む無効電力変動制御器71、外乱除去部72Aと周波数抽出部72Bを含む周波数検出器72及び単独運転検出器73を備える。単独運転検出装置7は、マイクロコンピュータ若しくはFPGAによって構成され、ディジタル演算処理によって各器の処理を行う。
【0050】
無効電力変動制御器71は、周波数変化率演算部71Aで周波数検出器72によって検出される周波数fの変化率(df/dt)を演算し、無効電力変動値生成部71Bでその変化率(df/dt)の大きさと極性に応じて無効電力目標値Qoを変動させる無効電力変動値ΔQを生成する。無効電力変動値生成部71Bは、予め設定された周波数変化率(df/dt)と無効電力変動値ΔQの関係式を用いて無効電力変動値ΔQを生成し、その無効電力変動値ΔQを制御装置6に入力する。
【0051】
制御装置6では、上述したように、無効電力目標値生成部6bで生成した無効電力目標値Qoに無効電力変動値生成部71Bから入力される変動値ΔQを加算する処理が行われる。これによりが周波数変化率(df/dt)に応じて無効電力目標値Qo’変動し、この無効電力目標値Qo’の変動に伴いdq回転座標系におけるインバータ2の出力電流の制御目標のq軸成分Iqoが変動するので、dq軸成分Ido,Iqoをdq−uvw変換して得られる三相電圧の制御目標vuo,vvo,vwoの位相が変動することになる。
【0052】
そして、系統連系インバータAが単独運転状態になると、三相電圧の制御目標vuo,vvo,vwoの位相の変動量が増大し、制御目標vuo,vvo,vwoの周波数が系統周波数から大きく逸脱することになるので、後述するように単独運転検出装置7の単独運転検出器73がその状態を検出し、遮断器5によって系統連系インバータAを解列させることになる。
【0053】
周波数検出器72は、交流電圧検出器8によって検出される系統連系インバータ装置Aの出力電圧の周波数fを検出する。本実施形態に係る単独運転検出装置7は、周波数検出器72の構成に特徴を有する。以下、周波数検出器72の構成について詳細に説明する。
【0054】
図2は、周波数検出器72の第1実施形態のブロック構成を示す図である。
【0055】
周波数検出器72は、交流電圧検出器8によって検出される三相交流電圧(U,V,Wの各相の相電圧)vu,vv,vwに含まれる不平衡成分や高調波成分など(周波数検出処理で外乱となる成分)を除去する外乱除去部72Aと、帯域通過型の複素係数フィルタ(複素係数バンドパスフィルタ)の位相特性を用いて外乱除去部721から出力される交流信号(三相交流電圧の基本波成分)の周波数を算出する周波数抽出部72Bと、で構成されている。
【0056】
外乱除去部72Aは、交流電圧検出器8から入力される三相交流電圧vu,vv,vw(所定のサンプリング周期で入力される瞬時値)を互いに直交する二相交流電圧vα,vβに変換する三相/二相変換部721と、三相/二相変換部721から出力される二相交流電圧vα,vβに含まれる不平衡成分(周波数−fsの成分)と所定次数の高調波成分(主として5次高調波成分(−5fs)、7次高調波成分(+7fs)、11次高調波成分(−11fs)などの高調波成分)を除去する複素係数バンドパスフィルタを用いた第1複素係数フィルタ部722と、第1複素係数フィルタ部722から出力される不平衡成分及び高調波成分を含まない二相交流電圧vr,vjを正規化する正規化部723と、を含む。
【0057】
三相/二相変換部721は、交流電圧検出器8から入力される三相交流電圧vu,vv,vwを二相交流電圧vα,vβに変換する処理を行う。図4(a)に示すように、静止座標系として水平方向のu軸を位相θの基準軸とし、u軸に対して±2π/3の角度で開いた方向にv軸とw軸を反時計回りに配置したuvw座標系と、u軸に沿うα軸とそのα軸に直交するβ軸とを配置したαβ座標系(静止直交座標系)とを設け、これらの座標系で角速度ωで反時計回りに回転する電圧ベクトルVを考えると、対称三相交流電圧vu,vv,vwは、電圧ベクトルVのu軸成分、v軸成分及びw軸成分と考えられ、二相交流電圧vα,vβは、電圧ベクトルVのα軸成分、β軸成分と考えることができる。
【0058】
従って、三相二相変換処理は、電圧ベクトルVのu軸成分vu、v軸成分vv及びw軸成分vwを電圧ベクトルVのα軸成分vαとβ軸成分vβに変換する処理である。なお、以下の説明では、交流信号と交流信号のベクトルを区別するため、交流信号を小文字で表記し、交流信号のベクトルを大文字で表記することとする。
【0059】
三相交流電圧vu,vv,vwを二相交流電圧vα,vβに変換する変換式は、
【数1】
である。
【0060】
三相/二相変換部721は、(1)式,(2)式の演算を行うことにより交流電圧検出器8から入力される三相交流電圧vu,vv,vwを二相交流電圧vα,vβに変換する。
【0061】
交流電圧検出器8で検出される三相交流電圧vu,vv,vwは、一般に、基本波成分以外に不平衡成分や3次、5次、7次、11次などの奇数次の高調波成分(図5の周波数成分参照)が含まれる非対称三相交流電圧である。従って、三相/二相変換部721からはこれらの成分についても三相二相変換した成分を含む二相交流電圧vα’,vβ’が出力される。
【0062】
三相交流電圧vu,vv,vwの基本波成分vsu,vsv,vswは、基本波の電圧ベクトルVsのuvw座標系におけるu、v、wの各軸方向の成分として定義される。一方、三相交流電圧vu,vv,vwの不平衡成分vsu’,vsv’,vsw’は、図4(b)に示すように、uvw座標系に対してu軸、v軸及びw軸の配列順が逆になっているuwv座標系において、不平衡成分の電圧ベクトルVs’のu、v、wの各軸方向の成分として定義される。
【0063】
基本波成分vsu,vsv,vswを、
vsu=As・cos(ωs・t) …(3A)
vsv=As・cos(ωs・t-2π/3) …(3B)
vsw=As・cos(ωs・t-4π/3) …(3B)
但し、As;基本波成分の振幅
とすると、不平衡成分vsu’,vsv’,vsw’は、
vsu’=As’・cos(ωs・t) …(4A)
vsv’=As’・cos(ωs・t-4π/3) …(4B)
vsw’=As’・cos(ωs・t-2π/3) …(4C)
但し、As’;不平衡成分の振幅
で表わされる。
【0064】
(3A)式〜(3C)式を(1)式,(2)式に代入して基本波成分の二相交流電圧vsα,vsβを求めると、
vsα=√(3/2)・As・cos(ωs・t) …(5)
vsβ=√(3/2)・As・sin(ωs・t) …(6)
となる。また、(4A)式〜(4C)式を(1)式,(2)式に代入して不平衡成分の二相交流電圧vsα’,vsβ’を求めると、
vsα’=√(3/2)・As’・cos(ωs・t)
vsβ’=−√(3/2)・As’・sin(ωs・t)
となる。そして、cos(ωs・t)=cos(−ωs・t)、−sin(ωs・t)=sin(−ωs・t)であるから、不平衡成分の二相交流電圧vsα’,vsβ’は、
vsα’=√(3/2)・As’・cos(−ωs・t) …(7)
vsβ’=√(3/2)・As’・sin(−ωs・t) …(8)
となる。
【0065】
(7)式及び(8)式と(5)式及び(6)式を比較すると、基本波成分の角周波数は「ωs」であるのに対し、不平衡成分の角周波数は「−ωs」である点が相違する。角周波数ωsを「正の周波数」とすると、不平衡成分の角周波数−ωsは「負の周波数」となるから、不平衡成分vsu’,vsv’,vsw’を三相二相変換して得られる二相交流電圧vsα’,vsβ’は負の周波数を有する電圧ということができる。
【0066】
図5において、基本波成分を正の周波数領域の周波数「fs」の位置に表示し、不平衡成分の周波数を「−fs」として不平衡成分を負の周波数領域の周波数「−fs」の位置に表示しているのは上記の周波数の関係を示している。なお、図5には、周波数検出に影響のある高調波成分として5次、7次、11次の高調波成分のみを描いている。3の整数倍の高調波成分は線間電圧には表れず、相電圧でもΔ結線のトランスで除去され、11次よりも大きい奇数次の高調波成分はレベルが小さく、無視し得るから、図5には記載していない。
【0067】
基本波成分vsu,vsv,vswの5次、7次、11次の高調波成分vnu,vnv,vnw(nは次数。n=5,7,11)は、
vnu=An・cos(n・ωs・t) …(9)
vnv=An・cos(n・ωs・t-n・2π/3) …(10)
vnw=An・cos(n・ωs・t-n・4π/3) …(11)
で表わされるから、(9)式〜(11)式を(1)式,(2)式に代入して5次,7次,11次の高調波成分の二相交流電圧(V5α,V5β),(V7α,V7β),(V11α,V11β)を求めると、
v5α=√(3/2)・A5・cos(−5ωs・t) …(12)
v5β=√(3/2)・A5・sin(−5ωs・t) …(13)
v7α=√(3/2)・A7・cos(7ωs・t) …(14)
v7β=√(3/2)・A7・sin(7ωs・t) …(15)
v11α=√(3/2)・A11・cos(−11ωs・t) …(16)
v11β=√(3/2)・A11・sin(−11ωs・t) …(17)
となる。
【0068】
不平衡成分が負の周波数になるのは、不平衡成分の相順(uvwが時計回りの順)が基本波成分の相順(uvwが反時計回りの順)に対して逆になるからである。従って、基本波成分の周波数fsをn倍(n:2以上の整数)したn次高調波成分を三相二相変換した二相交流電圧vnα,vnβ(添え字のnは次数。以下、同じ)の角周波数ωnが基本波成分の二相交流電圧vsα,vsβと同じの符号になる場合は、そのn次高調波成分の周波数fnは正の周波数となり、n次高調波成分vnu,vnv,vnwの相順は基本波成分vsu,vsv,vswの相順と同一になる。逆に、二相交流電圧vnα,vnβの角周波数ωnが基本波成分の二相交流電圧vsα,vsβと逆の符号になる場合は、そのn次高調波成分の周波数fnは負の周波数となり、n次高調波成分vnu,vnv,vnwの相順は基本波成分vsu,vsv,vswの相順と逆になる。
【0069】
(12)式〜(17)式より、5次,11次の高調波成分は負の周波数を有し、7次の高調波成分は正の周波数を有するから、図5では、正相の5次高調波成分と11次高調波成分は、負の周波数領域の周波数「−5fs」と「−11fs」の位置にそれぞれ表示し、逆相の5次高調波成分と11次高調波成分は、正の周波数領域の周波数「5fs」と「11fs」の位置にそれぞれ表示している。また、正相の7次高調波成分は正の周波数領域の周波数「7fs」の位置に表示し、逆相の7次高調波成分は、負の周波数領域の周波数「−7fs」の位置に表示している。
【0070】
従って、三相/二相変換部721からは(5)式〜(8)式、(12)式〜(17)式で表わされる基本波成分、不平衡成分及び5次、7次、11次の高調波成分の二相交流電圧(vsα,vsβ),(vsα’,vsβ’),(vnα,vnβ)(n=5,7,11)を含む二相交流電圧vα’,vβ’が出力される。
【0071】
第1複素係数フィルタ部722は、z変換表現による伝達関数H(z)が下記の(18)式で表される1次のIIRバンドパスフィルタで構成され、図5に示す周波数特性を有している。(18)式において、複素係数a1におけるfd[Hz]は、通過帯域の中心周波数f0をサンプリング周波数で正規化した正規化周波数である。また、Ωd[rad/s]は、正規化角周波数である。例えば、サンプリング周波数を「fsr」とし、中心周波数f0を系統周波数fsに設定すると、fdはfs/fsr、Ωdは2π・fd=2π・(fs/fsr)となる。なお、正規化した角周波数Ωdは、−π<Ωd<πである。また、rは、通過帯域の帯域幅を決めるパラメータ(0<r<1)である。
【0072】
【数2】
【0073】
図6は、上記(18)式の演算処理を行う処理回路を示すブロック図である。同図に示すように、第1複素係数フィルタ部722は、(18)式の分母の演算処理がフィードバック回路で構成され、そのフィードバック回路の出力に分子の係数b0を乗算する回路によって構成される。
【0074】
図6に示すブロック図において、u[k](k:離散時間を表すインデックス番号)は入力データ、x[k]は第1複素係数フィルタ部722の状態データ、y[k]は第1複素係数フィルタ部722の出力データである。入力データu[k]、状態データx[k]及び出力データy[k]の間には、
x[k]=r・exp(j・Ωd)・x[k-1]+u[k] …(19)
y[k]=(1−r)・x[k] …(20)
が成立する。
【0075】
第1複素係数フィルタ部722は複素係数バンドパスフィルタで構成されるので、入力データu[k]が複素データか実データ(複素データの虚数部が「0」のデータ)かに関わらず、状態データx[k]及び出力データy[k]が複素信号のデータとなる。従って、入力データu[k]、状態データx[k]及び出力データy[k]をそれぞれu[k]=ur[k]+j・uj[k]、x[k]=xr[k]+j・xj[k]、y[k]=yr[k]+j・yj[k]の複素データ、複素係数a1をa1=r・exp(j・Ωd)=ar+j・aj=r・cos(Ωd)+j・r・sin(Ωd)として(19)式と(20)式に代入し、実数部と虚数部の関係式に分けると、
xr[k]=r・cos(Ωd)・xr[k-1]−r・sin(Ωd)・xj[k-1]+ur[k] …(21)
xj[k]=r・cos(Ωd)・xj[k-1]+r・sin(Ωd)・xr[k-1]+uj[k] …(22)
yr[k]=(1−r)・xr[k] …(23)
yj[k]=(1−r)・xj[k] …(24)
となる。
【0076】
図7は、(21)式〜(24)式に基づき第1複素係数フィルタ部722の複素演算処理を行う回路構成を示す図である。同図において、係数arと係数ajはそれぞれ複素係数a1=r・exp(j・Ωd)の実数部と虚数部であり、ar=r・cos(Ωd)、aj=r・sin(Ωd)である。
【0077】
同図に示すように、第1複素係数フィルタ部722は、6個の乗算器722a〜722fと、2個の加算器722g,722hと、2個の遅延回路722i,722jで構成される。遅延回路722iは、状態データの実数部xr[k-1]を生成する回路であり、遅延回路722jは、状態データの虚数部xj[k-1]を生成する回路である。乗算器722a,722bはそれぞれ(21)式の第1項と第2項(負の符号を含む)を演算する演算器であり、加算器722gは(21)式の第1項と第2項と第3項を加算する演算器である。従って、加算器722gから(21)式で示す状態データの実数部xr[k]が出力される。
【0078】
一方、乗算器722c,722dはそれぞれ(22)式の第1項と第2項を演算する演算器であり、加算器722hは(22)式の第1項と第2項と第3項を加算する演算器である。従って、加算器722hから(22)式で示す状態データの虚数部xj[k]が出力される。また、乗算器722e,722fはそれぞれ(23)式と(24)式を演算する演算器である。
【0079】
本実施形態では、三相/二相変換部721を設け、三相交流電圧vu,vv,vwを互いに直交する二相交流電圧vα,vβに変換しているが、二相交流電圧vα,vβは、それぞれ複素データur+j・ujの実数部と虚数部に対応させることができるので、二相交流電圧vαのサンプリングデータを入力データの実数部ur[k]として加算器722gに入力し、二相交流電圧vβのサンプリングデータを入力データの虚数部uj[k]として加算器722hに入力している。
【0080】
二相交流電圧vαのサンプリングデータが第1複素係数フィルタ部722に入力される毎に、遅延回路722i、乗算器722a,722b,722e及び加算器722gで(21)式及び(23)式の演算処理が繰り返され、これにより、乗算器722eからは(5)式で示される基本波成分を三相二相変換した二相交流電圧vsαのみの出力データyr[k]が出力される。また、二相交流電圧vβのサンプリングデータが第1複素係数フィルタ部722に入力される毎に、遅延回路722j、乗算器722c,722d,722f及び加算器722hで(22)式及び(24)式の演算処理が繰り返され、これにより、乗算器722fからは(6)式で示される基本波成分を三相二相変換した二相交流電圧vsβのみの出力データyj[k]が出力される。
【0081】
バンドパスフィルタを実係数の2次IIRフィルタで構成した場合、その2次IIRフィルタの伝達関数H(z)(z=exp(j・ω))は、
H(z)=(1-r2+2(r-1)・r・cos(Ωd)・z-1)/(1-2r・cos(Ωd)・z-1+ r2・z-2)
で表わされる。この伝達関数H(z)の振幅特性M(ω)を求めると、M(ω)=(1-2r・cos(Ωd±ω)+r2)=0を満たすωで極が表れるから、2次IIRフィルタはその極の周波数を通過させる特性を有する。r≒1とすると、cos(Ωd±ω)≒1より、2次IIRフィルタを通過させる正規化周波数fdはfd=±Ωd/2πとなるから、正規化角周波数Ωdを基本波成分の角周波数に設定した実係数の2次IIRフィルタでは、不平衡成分(−fs=−Ωd・fsr/2πの成分)も通過させることになる。すなわち、図5に示す周波数特性において、2次IIRフィルタでは「−fs」に表れる不平衡成分も通過させることになる。
【0082】
一方、(18)式に示す伝達関数H(z)の振幅特性M(ω)求めると、M(ω)=(1−r)/√{1−2r・cos(Ωd−ω)+r2}となり、(1−2r・cos(Ωd−ω)+r2)=0を満たすωだけに極が表れるから、正規化角周波数Ωdを基本波成分の角周波数(ω=Ωd)に設定した複素係数の1次IIRフィルタは、図5に示す周波数特性を有する。従って、複素係数の1次IIRフィルタでは、基本波成分(fs=Ωd・fsr/2πの成分)だけを通過させ、不平衡成分や高調波成分を通過させることはない。
【0083】
図8は、不平衡成分と5次、7次、11次の高調波成分を5%含む三相交流電圧vu,vv,vwの波形を示す図である。図9は、図8に示す三相交流電圧vu,vv,vwを三相/二相変換部721及び中心周波数f0を系統周波数fs(60[Hz])に設定した第1複素係数フィルタ部722によってフィルタリング処理をした後、二相交流電圧を三相交流電圧に逆変換して得た三相交流電圧vu’,vv’,vw’をシミュレートした波形を示す図である。
【0084】
中心周波数f0を系統周波数fsに設定した第1複素係数フィルタ部722は、図5に示す周波数特性を有するから、図9に示されるように、三相交流電圧vu,vv,vwに含まれる不平衡成分と5次、7次、11次の高調波成分を第1複素係数フィルタ部722により好適に除去できることが分かる。
【0085】
なお、図3では、第1複素係数フィルタ部722から出力データyr[k],yj[k]によって出力される二相交流電圧を、二相交流電圧vα,vβと区別するため、それぞれ「vr」,「vj」と表記している。
【0086】
第1複素係数フィルタ部722から出力される、(5)式,(6)式で表わされる二相交流電圧vr,vjは、U相の電圧vuの位相角φを「0」とした場合であるが、三相電力系統BのU相の電圧vuの位相がずれ、位相φ≠0の場合は、第1複素係数フィルタ部722から出力される二相交流電圧vr,vjは、vr=As・cos(ωs・t+φ)、vj=As・sin(ωs・t+φ)となる。
【0087】
正規化処理部723は、第1複素係数フィルタ部722から出力される二相交流電圧vr,vjのレベルを「1」に正規化する演算処理を行う。第1複素係数フィルタ部722から出力される二相交流電圧vr,vjは振幅が同一の正弦波と余弦波で、√(vr2+vj2)を演算することにより振幅が求められるから、正規化処理部723では、出力データyr[k],yj[k]に対してそれぞれyr[k]/√(yr[k]2+yj[k]2)とyj[k]/√(yr[k]2+yj[k]2)の演算処理を行って二相交流電圧vr,vjの正規化処理が行われる。従って、正規化処理部723からは、vr’=cos(θs)(θs=ωs・t)とvj’=sin(θs)で表わされる信号のデータが出力される。
【0088】
周波数抽出部72Bは、通過帯域における位相特性がリニアな複素係数バンドパスフィルタからなる第2複素係数フィルタ部724と、この第2複素係数フィルタ部724に入力される電圧ベクトルVin=exp(j・ωs・t)とこの第2複素係数フィルタ部724から出力される電圧ベクトルVout=exp(j・ωs・t+ψ)を用いて両電圧ベクトルの位相差ψを算出する位相差算出部725と、位相差算出部725で算出される位相差ψを所定の演算式を用いて電圧ベクトルVinの周波数f(=(ωs/2π)を算出する周波数算出部726と、を含む。
【0089】
第2複素係数フィルタ部724に用いられる複素係数バンドパスフィルタは、第1複素係数フィルタ部722に用いられる複素係数バンドパスフィルタと同一の中心周波数f0を有する。また、複素係数バンドパスフィルタは、その通過帯域における位相特性(周波数に対する位相の特性)が直線近似で表わされる特性を有している。
【0090】
図10は、第2複素係数フィルタ部724に用いられる複素係数バンドパスフィルタの通過帯域における位相特性の一例を示す図である。同図は、中心周波数f0を系統周波数fs=60[Hz]に設定した場合のf0±5[Hz]における位相ψ[deg]の変化を示している。
【0091】
図10によれば、周波数fに対する位相ψの変化は直線的に変化し、位相ψと周波数fとの間にはf=p・ψ+qの関係式が成立する。f=60[Hz]でψ=0[deg]、f=57.25[Hz]でψ=0.2[deg]であるから、60=q、57.25=0.2・p+qよりp≒−13.75となり、図10の例では、位相特性と位相ψから周波数fを求める演算式は、f=−13.75・f+60となる。
【0092】
本実施形態では、第2複素係数フィルタ部724に用いられる複素係数バンドパスフィルタは、第1複素係数フィルタ部722に用いられる複素係数バンドパスフィルタと同一である。従って、その具体的な演算回路は、図7に示した回路と同じであるので、ここではその部分の詳細な説明は省略する。
【0093】
位相差算出部725は、第2複素係数フィルタ部724に入力される電圧ベクトルVinと第2複素係数フィルタ部724から出力される電圧ベクトルVoutを用いて位相差ψを算出する。電圧ベクトルVin=exp(j・ωs・t)の共役な電圧ベクトルVin*は、Vin*=exp(−j・ωs・t)であり、この電圧ベクトルVin*と出力電圧ベクトルVout=exp[j・(ωs・t+ψ)]との乗算を行うと、Vin*・Vout=exp(−j・ωs・t+j・ωs・t+j・ψ)=exp(j・ψ)より位相差ψのベクトルが得られる。電圧ベクトルVin*=exp(−j・ω・t)=Rin−j・Xin、電圧ベクトルVout=exp[j・(ωs・t+ψ)]=Rout+j・Xoutとすると、Vin*・Vout=(Rin・Rout+Xin・Xout)+j(Rin・Xout−Xin・Rout)=cos(ψ)+jsin(ψ)であるから、sin(ψ)=(Rin・Xout−Xin・Rout)より、位相差算出部725は、sin-1(Rin・Xout−Xin・Rout)の演算処理をすることにより位相差ψを算出する。
【0094】
なお、cos(ψ)=(Rin・Rout+Xin・Xout)より、cos-1(Rin・Rout+Xin・Xout)の演算処理をすることにより位相差ψを算出してもよく、tan(ψ)=(Rin・Xout−Xin・Rout)/(Rin・Rout+Xin・Xout)より、tan-1[(Rin・Xout−Xin・Rout)/(Rin・Rout+Xin・Xout)]の演算処理をすることにより位相差ψを算出してもよい。
【0095】
図11は、位相差算出部725の演算処理を行う回路構成を示す図である。
【0096】
位相差算出部725には第2複素係数フィルタ部724に入力される電圧ベクトルVinの実数部Rinと虚数部Xin、第2複素係数フィルタ部14から出力される電圧ベクトルVoutの実数部Routと虚数部Xoutの2つのデータが入力される。電圧ベクトルVinの実数部Rinは、正規化処理部723から出力される電圧vr’=cos(ωs・t)のデータであり、虚数部Xinは、正規化処理部723から出力される電圧vj’=sin(ωs・t)のデータである。一方、電圧ベクトルVoutの実数部Routは第2複素係数フィルタ部724から出力される電圧yr=cos(ωs・t+ψ)のデータであり、虚数部Xoutは第2複素係数フィルタ部724から出力される電圧yj=sin(ωs・t+ψ)のデータである。従って、位相差ψの演算式は、vr’・yj−vj’・yr=Ψとすると、
ψ=sin-1(Ψ) …(25)
となる。
【0097】
位相差算出部725は、2つの乗算器725a,725bと1つの加算器725cと逆正弦値演算器725dで構成されている。乗算器725aは、Ψの中のvr’・yjの乗算を行い、乗算器725bは、Ψの中のvj’・yrの乗算を行う。また、加算器725cは、乗算器725aの乗算結果から乗算器725bの乗算結果を減算して逆三角関数の引数Ψを算出する。そして、逆正弦値演算器725dは、加算器725cから出力される引数Ψに対してsin-1(Ψ)の演算を行い、位相差ψを算出する。
【0098】
周波数算出部726は、位相差演算部725から入力される位相差ψに対して、第2複素係数フィルタ部724の位相特性に基づく周波数fを求めるための所定の演算式f=p・ψ+q(図10の例では、P=−13.5、q=60)を実行することにより周波数fを算出する。従って、周波数算出部726は、図12に示すように乗算器726aと加算器726bとによって構成される。乗算器726aは位相差演算部15から入力される位相差ψに係数pを乗算し、加算器726bはその乗算結果に係数qを加算して位相差ψを出力する。
【0099】
なお、所定の周波数fの範囲についてf=p・ψ+qの関係を満たす周波数fと位相差ψのテーブルを記憶しておき、そのテーブルを用いて位相差演算部725から出力される位相差ψに対応する周波数fを求めるようにしてもよい。
【0100】
図13は、第1実施形態に係る周波数検出器72で検出される周波数fの応答特性をシミュレーションした結果である。具体的には、電力系統の三相交流電圧の周波数が系統周波数fs=60[Hz]が安定している状態でシミュレーションを開始し、シミュレーション開始から0.2秒後に周波数fsを瞬時的に60.3[Hz]に変化させた場合の周波数検出器72の応答特性を示している。また、図14は、シミュレーション開始から0.3秒後に周波数検出器72から出力される周波数fの変動状態を拡大した図である。入力される三相交流電圧vu,vv,vwに含まれる不平衡成分と5次、7次、11次の高調波成分の含有条件をそれぞれ5%とし、サンプリング周波数を系統周波数fsの数百倍の高周波としている。また、第1複素係数フィルタ部722の通過帯域の中心周波数f0は系統周波数fs=60[Hz]に設定している。
【0101】
図13に示すように、シミュレーション開始から0.2秒後に電力系統の周波数fsを瞬時的に60.0[Hz]から60.3[Hz]に上昇させると、周波数検出器72から出力される周波数fは、電力系統の周波数fsの急変に追従しようとしてパルス状に急変するが、周波数急変時(時刻0.2秒)から凡そ0.05秒後には60.3[Hz]付近に収束することが分かる。また、周波数急変時から0.1秒経過した時(時刻0.3秒)には、図14に示すように、周波数検出器72から出力される周波数fのリップルが±0.01[Hz]程度(変化後の電力系統の周波数fs=60.3[Hz]に対して変動幅は約0.016%)となるので、周波数検出器72は、出力周波数fを周波数急変時(時刻0.2秒)から0.1秒以内には電力系統の変化後の周波数fsに整定することができる。
【0102】
図1に戻り、単独運転検出器73は、周波数検出器72により検出される周波数fの系統周波数fSからの変動量Δf(=f−fS)を演算し、その変動量Δfが予め設定した閾値fthを超えたか否かを判定する。そして、変動量Δfが閾値fthを超えると、単独運転検出器73は、系統連系インバータ装置Aが単独運転状態に移行したとして遮断器5に解列信号を出力する。遮断器5は、単独運転検出器73からの解列信号によって単独運転検出器73と三相電力系統Bとの接続を切断する。
【0103】
以上のように、第1実施形態によれば、複素係数バンドパスフィルタを用いた周波数検出装置によって周波数検出器72を構成しているので、系統電力インバータAの出力電圧の周波数を高い精度で連続的に検出することができ、系統電力インバータAが単独運転状態に移行した時に高速かつ高い精度で系統電力インバータAを三相電力系統Bから切り離すことができる。
【0104】
第1実施形態は、第2複素係数フィルタ部724の複素係数バンドパスフィルタの通過帯域における位相特性の線形性を利用して、当該複素係数バンドパスフィルタの入力信号と出力信号の位相差ψから入力信号の周波数fを求める方法であるが、第2複素係数フィルタ部724の複素係数バンドパスフィルタの複素係数a1を変更可能にし、当該複素係数バンドパスフィルタの入力信号と出力信号の位相差ψに基づいて当該複素係数バンドパスフィルタの中心周波数f0を入力信号の周波数fに一致させるように変化させる制御を行うことで、複素係数バンドパスフィルタの中心周波数f0から入力信号の周波数fを求めてもよい。
【0105】
第2複素係数フィルタ部724の複素係数バンドパスフィルタは、図10に示すように、中心周波数f0では位相差ψがゼロで、中心周波数f0よりも高い周波数領域では位相差ψが負になり、中心周波数f0よりも低い周波数領域では位相差ψが正になるように直線的に変化する特性を有している。従って、位相差ψの正負の符号を見れば、複素係数バンドパスフィルタの入力信号の周波数fが中心周波数f0に対して高い周波数領域にあるのか低い周波数領域にあるのかが分かる。位相特性は直線的に変化するから、ψ<0であれば、位相差ψを監視しながら中心周波数f0を減少させ、ψ>0であれば、中心周波数f0を増加させ、ψ=0であれば、中心周波数f0を変化させないように複素係数a1を制御することで、複素係数バンドパスフィルタの中心周波数f0をψ=0となる周波数、すなわち、入力信号の周波数fに設定することができる。
【0106】
図15は、第2複素係数フィルタ部724の複素係数バンドパスフィルタの複素係数a1を変更可能にし、中心周波数f0を入力信号の周波数fに制御する第2実施形態のブロック構成を示す図である。また、図16は、第2複素係数フィルタ部724’における複素演算処理の回路を示す図である。
【0107】
図15に示す周波数検出器72’は、図3に示す周波数検出器72に対して周波数抽出部72B’の構成が異なる。具体的には、周波数抽出部72B’を、周波数算出部726に代えて位相差算出部15で算出される位相差ψに基づいて中心周波数f0を変更する中心周波数制御部727を設け、第2係数フィルタ部724’の中心周波数f0を決定する複素係数a1を中心周波数制御部727から入力される正規化角周波数Ωd’によって制御する構成としたものである。また、図16に示す複素演算処理回路は、図7に示す複素演算処理回路に対して、中心周波数制御部727から入力される正規化角周波数Ωd’を用いて複素係数a1の実数部の係数arを演算する係数実数部演算回路722mと虚数部の係数ajを演算する係数虚数部演算回路722kを追加したものである。
【0108】
第2実施形態では、中心周波数制御部727が位相差算出部725から入力される位相差ψを「0」と比較し、ψ>0、ψ<0及びψ=0のいずれかの比較結果に応じて第2複素係数フィルタ部724’の正規化角周波数Ωdを変化させる。Ωd=2π・fd、fd=f0/fsrで、fdは第2複素係数フィルタ部724’の中心周波数f0に相当するから、正規化角周波数Ωd’を変化させることにより第2複素係数フィルタ部724’の中心周波数f0が変化することになる。
【0109】
中心周波数制御部727は、位相差算出部725から出力される位相差ψ[rad]に対して、ψ×180/πの演算を行って角度の単位の位相差ψ’[deg]に変換した後、(−K×ψ’/fsr)(K:0〜1の所定のゲイン。例えば、K=0.1、fsr:サンプリング周波数。)の演算を行って変化量ΔΩdを算出し、その変化量ΔΩdをΩds=2π・(fs/fsr)に加算して変化値Ωd’を算出する処理を行う。Ωdsは中心周波数f0を系統周波数fs(例えば、60[Hz])に設定した正規化角周波数である。
【0110】
位相差ψには、(25)式の演算処理でψ<0又は0≦ψに応じて正負の符号が付されるので、変化量ΔΩdの正規化角周波数Ωdsへの加算処理で、ψ<0の場合には変化量ΔΩdを正規化角周波数Ωdsから減算し、0≦ψの場合には変化量ΔΩdを正規化角周波数Ωdsに加算する処理が行われる。なお、上記の正規化角周波数Ωd’を変化させるための演算処理は一例であり、他の演算方法により位相差ψの符号に応じて正規化角周波数Ωd’を増加又は減少させてもよい。
【0111】
中心周波数制御部727で変更設定された正規化角周波数Ωd’=Ωds±ΔΩdは第2複素係数フィルタ部724’にフィードバックされるとともに、正規化角周波数Ωd’に対して(Ωd’×fsr/2π)の演算処理を行って中心周波数の変化値f0’(=fs±Δf)が算出され、その変化値fs’が周波数検出値f0’として出力される。
【0112】
正規化角周波数Ωd’がフィードバックされた第2複素係数フィルタ部724’では、係数実数部演算回路722mで中心周波数制御部17からフィードバックされる正規化角周波数Ωd’を用いて、
ar=r・cos(Ωd’) …(26)
の演算式により複素係数a1の実数部の係数arが算出され、その算出値arが乗算器722aと乗算器722dに入力される。
【0113】
また、係数虚数部演算回路722kで中心周波数制御部17からフィードバックされる正規化角周波数Ωd’を用いて、
aj=r・sin(Ωd’) …(27)
の演算式により複素係数a1の虚数部の係数ajが算出され、その算出値ajが乗算器722bと乗算器722cに入力される。
【0114】
従って、位相差算出部725から入力される位相差ψが「0」でなければ、位相差ψが「0」となる方向に複素係数a1が変化するから、乗算器722eと乗算器722fからは交流電圧検出器8で検出される三相交流電圧vu,vv,vwの基本波成分の周波数、すなわち、系統周波数fsと同一の周波数の電圧ベクトルの実数部の出力データyr[k]と虚数部の出力データyj[k]が出力される。
【0115】
第2実施形態では、中心周波数制御部727から出力される周波数検出値f0’は、周波数検出器72’に入力される三相交流電圧vu,vv,vwの周波数fsが安定していれば、その周波数fsを示し、周波数fsが変動すれば、その変動に追従するように変化し、入力される三相交流電圧vu,vv,vwの周波数fsを示すものとなる。
【0116】
以上のように、第2実施形態でも系統電力インバータAの出力電圧の周波数fsを高い精度で連続的に検出することができ、系統電力インバータAが単独運転状態に移行した時に高速かつ高い精度で系統電力インバータAを三相電力系統Bから切り離すことができる。
【0117】
第2実施形態は、第1複素係数フィルタ部722に複素係数バンドパスフィルタを用いているが、第1複素係数フィルタ部722に複素係数ノッチフィルタを用いて不平衡成分や5次、7次、11次等の高調波成分を除去するようにしてもよい。
【0118】
図17は、第2実施形態の第1複素係数フィルタ部722として複素係数ノッチフィルタを用いる第3実施形態のブロック構成を示す図である。また、図18は、第1複素係数フィルタ部722’に設けられる複素係数ノッチフィルタの多段構成の一例を示す図である。
【0119】
複素係数ノッチフィルタを用いた場合、入力信号の基本波成分の周波数がずれると、それに伴い不平衡成分と高調波成分の周波数もずれるため、複素係数ノッチフィルタの阻止周波数をずらす必要がある。このため、第3実施形態では、中心周波数制御部727から出力される正規化角周波数Ωd’を外乱除去部72A’内の第1複素係数フィルタ部722’にもフィードバックし、複素係数ノッチフィルタの阻止周波数を決定する複素係数を変更するようにしている。
【0120】
図5に示すように、三相電力系統Bの交流信号には基本波成分(+fs)以外に不平衡成分(−fs)や5次、7次、11次の高調波成分(−5fs,+7fs,−11fs)が含まれることが分かっているので、図17に示す第1複素係数フィルタ部722’は、それらの周波数毎にz変換表現による伝達関数H(z)が下記の(28)式で表される複素係数ノッチフィルタを設け、それらを多段に接続することによって図19に示す周波数特性を有する複素係数ノッチフィルタを構成している。
【0121】
【数3】
【0122】
なお、Ωdは、Ωd=2π・(n・fs/fsr)であり、n=−1に設定すると、不平衡成分(−fs)を阻止周波数とする複素係数ノッチフィルタとなる。また、n=−5、n=+7、n=−11に設定すると、それぞれ5次、7次、11次の高調波成分を阻止周波数とする複素係数ノッチフィルタとなる。従って、第1複素係数フィルタ部722’は、図18に示すように、−fs、−5fs、+7fs、−11fsを阻止周波数とする複素係数ノッチフィルタ722a,722b,722c,722dを縦続接続した構成となっている。
【0123】
また、上記(28)式の演算処理を行う処理回路のブロック図は、図20に示す構成となり、複素係数ノッチフィルタ(NF)を用いた複素係数フィルタ部12の複素演算処理を行う回路は、図21に示す構成となる。
【0124】
図20は、図6に示すブロック図に対して、入力データu[k]からデータy[k]を減算し、その減算値を出力データe[k]として出力する回路を追加したものである。また、図21は、図16に示すブロック図に対して、係数実数部演算回路722mと係数虚数部演算回路722kを不平衡成分又は高調波成分の周波数を中心周波数とする係数arを演算する係数実数部演算回路722m’と係数ajを演算する係数虚数部演算回路722k’に変更している。そして、実数部の乗算器722eの後段に加算器722nを追加し、当該加算器722nで入力データの実数部ur[k]からデータy[k]の実数部yr[k]を減算して出力データの実数部er[k]を出力する構成としている。また、虚数部の乗算器722fの後段に加算器722oを追加し、当該加算器722oで入力データの虚数部uj[k]からデータy[k]の虚数部yj[k]を減算して出力データの虚数部ej[k]を出力する構成としている。
【0125】
係数実数部演算回路722m’では、中心周波数制御部727からフィードバックされる正規化角周波数Ωd’を用いて、
ar=r・cos(n・Ωd’) …(29)
の演算式により複素係数a1の実数部の係数arが算出され、その算出値arが乗算器722aと乗算器722dに入力される。
【0126】
また、係数虚数部演算回路722k’では、中心周波数制御部727からフィードバックされる正規化角周波数Ωd’を用いて、
aj=r・sin(n・Ωd’) …(30)
の演算式により複素係数a1の虚数部の係数ajが算出され、その算出値ajが乗算器722bと乗算器722cに入力される。
【0127】
なお、nは、阻止周波数の次数を示し、図18に示された複素係数ノッチフィルタ722aではn=−1、複素係数ノッチフィルタ722b,722c,722dではそれぞれn=−5,+7,−11となる。
【0128】
図21に示す回路は、図16に示す回路に対して、上述した係数実数部演算回路722m’及び係数虚数部演算回路722k’の演算内容の他は、加算器722n,722oでの減算処理が追加された点が異なるだけであるから、図21に示す回路の演算処理の詳細説明は省略する。
【0129】
第3実施形態に係る周波数検出器72”では、複素係数ノッチフィルタ722a〜722dによって不平衡成分(−fsの成分)や高調波成分(−5fs,+7fs,−11fsの成分)のレベルがそれぞれ抑制されるので、これらの成分が周波数抽出部72B’に入力されることを好適に阻止することができる。従って、第3実施形態に係る周波数検出器72”では安定かつ高い精度で三相電力系統Bの三相電圧の周波数fsを検出することができる。
【0130】
図22は、第3実施形態に係る周波数検出部72”で検出される周波数fの応答特性をシミュレーションした結果である。また、図23は、シミュレーション開始から0.3秒後に周波数検出器72”から出力される周波数fの変動状態を拡大した図である。シミュレーションの条件は、図13,図14に示すシミュレーション結果と同じである。
【0131】
図22に示すように、第3実施形態の場合もシミュレーション開始から0.2秒後に電力系統の周波数fsを瞬時的に60.0[Hz]から60.3[Hz]に上昇させると、周波数検出器72”から出力される周波数fはパルス状に急変するが、周波数急変時(時刻0.2秒)から凡そ0.05秒後にはほぼ60.3[Hz]に収束することが分かる。また、第3実施形態では、周波数急変時から0.1秒経過した時(時刻0.3秒)には、図23に示すように、周波数検出器72”から出力される周波数fのリップルはなく、第1実施形態よりも高速かつ高精度に三相電力系統Bの三相電圧の周波数fsを検出することができることが分かる。
【0132】
以上のように、第3実施形態によれば、複素係数ノッチフィルタを用いた周波数検出装置によって周波数検出部器72”を構成しているので、系統電力インバータAの出力電圧の周波数を第1,第2実施形態よりも高速で検出することができ、系統電力インバータAが単独運転状態に移行した時に第1,第2実施形態よりも高速で系統電力インバータAを三相電力系統Bから切り離すことができる。
【0133】
なお、第1複素係数フィルタ部722には複素係数バンドパスフィルタ又は複素係数ノッチフィルタのいずれを用いてもよいが、好ましくは複素係数バンドパスフィルタよりも複素係数ノッチフィルタを用いたほうが高速かつ高精度の位相検出特性を得ることができる。また、複素係数ノッチフィルタと複素係数バンドパスフィルタとを組み合わせれば、両者の特性の相乗効果を期待することができ、より高速かつ高精度の位相検出特性を得ることができる。
【0134】
また、周知のように、複素係数ノッチフィルタ及び複素係数バンドパスフィルタを多段構成とすれば、急峻なフィルタ特性とすることができるとともに、不平衡成分や高調波成分の除去特性と応答性を容易に調整できるので、実装する場合は適当な段数の多段構成にするとよい。
【0135】
第1実施形態に係る周波数検出器72では、第1複素係数フィルタ部722を複素係数バンドパスフィルタで構成する場合について説明したが、第3実施形態のように第1複素係数フィルタ部722を複素係数ノッチフィルタで構成してもよい。但し、この場合は、第3実施形態で説明したように、複素係数ノッチフィルタの阻止周波数を周波数算出部16で算出される周波数fに対して−f,−5f,7f,−11fの周波数に制御する必要がある。従って、この場合は、位相差算出部15の後段に正規角周波数の変化値Ωd’を算出する演算処理部を設け、その演算処理部で算出した正規角周波数の変化値Ωd’を複素係数ノッチフィルタで構成した第1複素係数フィルタ部722’にフィードバックさせるようにするとよい。
【0136】
また、第1実施形態の第1複素係数フィルタ部722を複素係数ノッチフィルタで構成する場合にはその複素係数ノッチフィルタに複素係数バンドパスフィルタを組み合わせた構成にして不平衡成分や高調波成分の除去効果を高めるようにしてもよい。この場合は、複素係数バンドパスフィルタの中心周波数を固定にしてもよいが、複素係数バンドパスフィルタの中心周波数を可変にし、複素係数ノッチフィルタの周波数を制御する機構(例えば、上記の正規角周波数の変化値Ωd’を算出する演算処理部)を利用して複素係数バンドパスフィルタの中心周波数を制御するようにしてもよい。
【0137】
また、第1実施形態の第1複素係数フィルタ部722を中心周波数が可変の複素係数バンドパスフィルタだけにしてもよい。この場合は、三相電力系統Bの系統周波数fsの変化に応じて複素係数バンドパスフィルタの中心周波数f0を変化させる構成を設ける必要がある。
【0138】
また、第2実施形態では、第1複素係数フィルタ部722の複素係数バンドパスフィルタの中心周波数f0を固定としたが、第2実施形態でも複素係数バンドパスフィルタの中心周波数f0を可変にし、三相電力系統Bの周波数fsの変化に応じて複素係数バンドパスフィルタの中心周波数f0を変化させる構成としてもよく、その複素係数バンドパスフィルタに第3実施形態の複素係数ノッチフィルタを組み合わせた構成としてもよい。これらの場合は、第2複素係数フィルタ部724’の中心周波数f0を制御する構成を利用して第1複素係数フィルタ部722の複素係数バンドパスフィルタの中心周波数や複素係数ノッチフィルタの阻止周波数を制御するようにすればよい。もちろん、中心周波数固定の複素係数バンドパスフィルタに複素係数ノッチフィルタを組み合わせた構成としてもよい。
【0139】
上記実施形態では、QCモード周波数シフト方式の単独運転検出装置について説明したが、本発明は、スリップモード周波数シフト方式等の他の周波数シフト方式の単独運転検出装置にも適用できる。例えば、スリップモード周波数シフト方式では、図1の周波数変化率演算部71Aを除去し、周波数検出器72で検出された周波数を用いて無効電力変動値生成部71Bで無効電力目標値Qoの変動値ΔQを設定するようにすればよい。また、周波数検出器72に複素係数フィルタを用いて周波数検出を行う周波数検出装置を用いる本発明は、周波数を検出し、その周波数の変動量を用いて単独運転検出を行う方式であれば、周波数シフト方式以外の他の方式にも広く適用することができる。
【0140】
また、上記の説明では電力系統Bが三相電力系統の場合について説明したが、電力系統Bが単相電力系統の場合にも本発明が適用できることは言うまでもない。この場合は、図3、図15、図17に示すブロック図において、三相/二相変換部721を除いた構成にすればよい。
【0141】
単相の場合は、単相交流電圧vが1つしかないので、その単相交流電圧vのサンプリングデータが入力データの実数部ur[k]として第1複素係数フィルタ部722に入力され、入力データの虚数部uj[k]には「0」が入力される。なお、図3、図15、図17に示す周波数検出器72,72’において、三相/二相変換部721を除去し、U,V,Wのいずれかの相の交流電圧vのサンプリングデータを入力データの実数部ur[k]として第1複素係数フィルタ部722に入力し、入力データの虚数部uj[k]には「0」を入力するようにしてもよい。
【0142】
複素係数フィルタを用いた第1複素係数フィルタ部722では、単相交流電圧が入力された場合でも三相交流電圧の場合と同様に互いに直交する二相交流電圧vr,vj(正弦波と余弦波の信号)が出力されるので、第1複素係数フィルタ部722,722’、正規化部723及び周波数抽出部72B,72B’,72B”は、図3、図15、図17に示す三相用の周波数検出器72,72’,72B”と同様の構成で実現することができる。
【符号の説明】
【0143】
A 系統連系インバータ装置
B 三相電力系統
1 直流電源
2 インバータ
3 フィルタ
4 変圧器
5 遮断器
6 制御装置
6a バス電圧目標値生成部
6b 無効電力目標値生成部
6c 無効電力算出部
6d uvw−dq変換部
6e,6f,6g,6h PI補償部
6i,6j 非干渉化部
6k dq−uvw変換部
6m PWM信号生成部
7 単独運転検出装置
71 無効電力変動制御器
71A 周波数変化率演算部
71B 無効電力変動値生成部
72,72’,72” 周波数検出器
72A 外乱除去部
721 三相/二相変換部
722,722’ 第1複素係数フィルタ部
723 正規化処理部
72B,72B’ 周波数抽出部
724,724’ 第2複素係数フィルタ部
725 位相差算出部
726 周波数算出部
73 単独運転検出器
8 交流電圧検出器
【特許請求の範囲】
【請求項1】
少なくとも電力系統に連系される系統連系インバータ装置から出力される交流信号の周波数を検出する周波数検出手段と、前記周波数検出手段の検出値に基づいて前記系統連系インバータ装置が単独運転状態に移行したことを検出する単独運転検出手段とを備える、系統連系インバータ装置の単独運転検出装置において、
前記周波数検出手段は、
前記交流信号を検出する交流信号検出手段と、
前記交流信号検出手段で検出された前記交流信号に含まれる基本波の負の周波数成分と高調波成分を除去し、基本波の正の周波数成分だけを出力する複素係数フィルタからなる第1のフィルタ手段と、
前記第1のフィルタ手段から出力される前記基本波の正の周波数成分を用いて当該基本波の周波数を算出する周波数算出手段と、
を含むことを特徴とする、系統連系インバータ装置の単独運転検出装置。
【請求項2】
前記第1のフィルタ手段の複素係数フィルタは、中心周波数が前記交流信号の周波数に設定された複素係数バンドパスフィルタである、請求項1に記載の系統連系インバータ装置の単独運転検出装置。
【請求項3】
前記周波数算出手段は、
中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、
前記第2のフィルタ手段に入力される前記基本波の正の周波数成分と前記第2のフィルタ手段から出力される前記基本波の正の周波数成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記基本波の正の周波数成分の位相差を算出する位相差演算手段と、
前記位相特性に基づき前記通過帯域における位相差から周波数を求めるための所定の関係式と前記位相差とを用いて、前記第2のフィルタ手段に入力された前記基本波の正の周波数成分の周波数を演算する周波数演算手段と、
を含む、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置。
【請求項4】
前記周波数算出手段は、
中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、
前記第2のフィルタ手段に入力される前記基本波の正の周波数分と前記第2のフィルタ手段から出力される前記基本波の正の周波数成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記基本波の正の周波数成分の位相差を算出する位相差演算手段と、
前記位相特性に基づき予め設定された前記通過帯域における位相差と周波数との関係を示す所定のテーブルと、
前記テーブルから前記位相差算出手段で算出された位相差に対応する周波数を読み出すことにより、前記第2のフィルタ手段に入力された前記基本波の正の周波数成分の周波数を算出する周波数演算手段と、
を含む、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置。
【請求項5】
前記周波数算出手段は、
位相差が中心周波数では零で、当該中心周波数より大きい周波数領域では負になり、小さい周波数領域では正になる位相特性を有し、かつ、前記中心周波数が変更可能な通過帯域型の複数係数フィルタからなる第2のフィルタ手段と、
前記第2のフィルタ手段に入力される前記基本波の正の周波数成分と前記第2のフィルタ手段から出力される前記基本波の正の周波数成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記基本波の正の周波数成分の位相差を算出する位相差演算手段と、
前記位相差算出手段で算出される位相差が正の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を所定の変化量で低下させ、前記位相差算出手段で算出される位相差が負の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を前記変化量で上昇させ、変化後の中心周波数を周波数の検出値として出力する中心周波数制御手段と、
を含む、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置。
【請求項6】
前記第1のフィルタ手段の複素係数フィルタは、前記中心周波数制御手段から出力される中心周波数に基づいて、当該中心周波数に対して負の周波数成分と所定次数の高調波成分となるように阻止周波数が制御される複数係数ノッチフィルタである、請求項5に記載の系統連系インバータ装置の単独運転検出装置。
【請求項7】
前記系統連系インバータ装置は、当該系統連系インバータ装置から出力される無効電力量を制御する電力メジャーループを有しており、
前記周波数検出手段で検出される前記交流信号の周波数に基づいて、前記無効電力量を揺動させる無効電力変動値を生成し、前記電力メジャーループにフィードバックする無効電力変動値生成手段を更に備え、
前記単独運転検出手段は、前記周波数検出手段で検出される周波数の変動量を算出し、その変動量が所定の閾値を超えることにより前記系統連系インバータ装置が単独運転状態に移行したことを検出する、請求項1乃至6のいずれかに記載の系統連系インバータ装置の単独運転検出装置。
【請求項8】
前記無効電力変動値生成手段は、前記周波数検出手段で検出される前記交流信号の周波数を用いて周波数変化率を算出し、その周波数変化率に比例して変動する前記無効電力変動値を生成する、請求項7に記載の系統連系インバータ装置の単独運転検出装置。
【請求項9】
前記交流信号は、単相若しくは三相の交流信号である、請求項1乃至8のいずれかに記載の系統連系インバータ装置の単独運転検出装置。
【請求項1】
少なくとも電力系統に連系される系統連系インバータ装置から出力される交流信号の周波数を検出する周波数検出手段と、前記周波数検出手段の検出値に基づいて前記系統連系インバータ装置が単独運転状態に移行したことを検出する単独運転検出手段とを備える、系統連系インバータ装置の単独運転検出装置において、
前記周波数検出手段は、
前記交流信号を検出する交流信号検出手段と、
前記交流信号検出手段で検出された前記交流信号に含まれる基本波の負の周波数成分と高調波成分を除去し、基本波の正の周波数成分だけを出力する複素係数フィルタからなる第1のフィルタ手段と、
前記第1のフィルタ手段から出力される前記基本波の正の周波数成分を用いて当該基本波の周波数を算出する周波数算出手段と、
を含むことを特徴とする、系統連系インバータ装置の単独運転検出装置。
【請求項2】
前記第1のフィルタ手段の複素係数フィルタは、中心周波数が前記交流信号の周波数に設定された複素係数バンドパスフィルタである、請求項1に記載の系統連系インバータ装置の単独運転検出装置。
【請求項3】
前記周波数算出手段は、
中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、
前記第2のフィルタ手段に入力される前記基本波の正の周波数成分と前記第2のフィルタ手段から出力される前記基本波の正の周波数成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記基本波の正の周波数成分の位相差を算出する位相差演算手段と、
前記位相特性に基づき前記通過帯域における位相差から周波数を求めるための所定の関係式と前記位相差とを用いて、前記第2のフィルタ手段に入力された前記基本波の正の周波数成分の周波数を演算する周波数演算手段と、
を含む、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置。
【請求項4】
前記周波数算出手段は、
中心周波数が前記交流信号の周波数に設定され、通過帯域で位相差が直線的に変化する位相特性を有する複数係数バンドパスフィルタからなる第2のフィルタ手段と、
前記第2のフィルタ手段に入力される前記基本波の正の周波数分と前記第2のフィルタ手段から出力される前記基本波の正の周波数成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記基本波の正の周波数成分の位相差を算出する位相差演算手段と、
前記位相特性に基づき予め設定された前記通過帯域における位相差と周波数との関係を示す所定のテーブルと、
前記テーブルから前記位相差算出手段で算出された位相差に対応する周波数を読み出すことにより、前記第2のフィルタ手段に入力された前記基本波の正の周波数成分の周波数を算出する周波数演算手段と、
を含む、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置。
【請求項5】
前記周波数算出手段は、
位相差が中心周波数では零で、当該中心周波数より大きい周波数領域では負になり、小さい周波数領域では正になる位相特性を有し、かつ、前記中心周波数が変更可能な通過帯域型の複数係数フィルタからなる第2のフィルタ手段と、
前記第2のフィルタ手段に入力される前記基本波の正の周波数成分と前記第2のフィルタ手段から出力される前記基本波の正の周波数成分を用いて所定の演算式により前記第2のフィルタ手段で生じる前記基本波の正の周波数成分の位相差を算出する位相差演算手段と、
前記位相差算出手段で算出される位相差が正の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を所定の変化量で低下させ、前記位相差算出手段で算出される位相差が負の場合は、その位相差が零になるまで前記第2のフィルタ手段の中心周波数を前記変化量で上昇させ、変化後の中心周波数を周波数の検出値として出力する中心周波数制御手段と、
を含む、請求項1又は2に記載の系統連系インバータ装置の単独運転検出装置。
【請求項6】
前記第1のフィルタ手段の複素係数フィルタは、前記中心周波数制御手段から出力される中心周波数に基づいて、当該中心周波数に対して負の周波数成分と所定次数の高調波成分となるように阻止周波数が制御される複数係数ノッチフィルタである、請求項5に記載の系統連系インバータ装置の単独運転検出装置。
【請求項7】
前記系統連系インバータ装置は、当該系統連系インバータ装置から出力される無効電力量を制御する電力メジャーループを有しており、
前記周波数検出手段で検出される前記交流信号の周波数に基づいて、前記無効電力量を揺動させる無効電力変動値を生成し、前記電力メジャーループにフィードバックする無効電力変動値生成手段を更に備え、
前記単独運転検出手段は、前記周波数検出手段で検出される周波数の変動量を算出し、その変動量が所定の閾値を超えることにより前記系統連系インバータ装置が単独運転状態に移行したことを検出する、請求項1乃至6のいずれかに記載の系統連系インバータ装置の単独運転検出装置。
【請求項8】
前記無効電力変動値生成手段は、前記周波数検出手段で検出される前記交流信号の周波数を用いて周波数変化率を算出し、その周波数変化率に比例して変動する前記無効電力変動値を生成する、請求項7に記載の系統連系インバータ装置の単独運転検出装置。
【請求項9】
前記交流信号は、単相若しくは三相の交流信号である、請求項1乃至8のいずれかに記載の系統連系インバータ装置の単独運転検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図10】
【図11】
【図12】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図8】
【図9】
【図13】
【図14】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図10】
【図11】
【図12】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図8】
【図9】
【図13】
【図14】
【図22】
【図23】
【公開番号】特開2013−99230(P2013−99230A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−243276(P2011−243276)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]