
能動型物体検出装置
【課題】簡単な構成かつ低コストで、容易に複数の検知エリアのうち所定エリアを電気的に個別的に検出制御ができる能動型物体検出装置を提供する。
【解決手段】投光光学系4と受光光学系9を、その区画された方向が互いに直交する左右方向Xまたは前後方向Yである特定の組み合わせとし、投光素子3を受光光学系9の区画された方向に沿って受光光学系9の区画数と同じ数またはその整数倍だけ配列させ、受光素子8を投光光学系4の区画された方向に沿って投光光学系4の区画数と同じ数またはその整数倍だけ配列させる。エリア個別制御手段14により、投光光学系4および受光光学系9に対応する投光素子3および受光素子8を電気的に作動または不作動に切り換えて、検知エリアAのうちの所定エリアの検出制御を個別的に行う。
【解決手段】投光光学系4と受光光学系9を、その区画された方向が互いに直交する左右方向Xまたは前後方向Yである特定の組み合わせとし、投光素子3を受光光学系9の区画された方向に沿って受光光学系9の区画数と同じ数またはその整数倍だけ配列させ、受光素子8を投光光学系4の区画された方向に沿って投光光学系4の区画数と同じ数またはその整数倍だけ配列させる。エリア個別制御手段14により、投光光学系4および受光光学系9に対応する投光素子3および受光素子8を電気的に作動または不作動に切り換えて、検知エリアAのうちの所定エリアの検出制御を個別的に行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の検知エリアに向けて物体検出用の検知線を送出して、物体で反射した検知線を受けたときに発生する受光信号が設定レベルを超えることにより人体のような物体を検出する能動型物体検出装置に関するものである。
【背景技術】
【0002】
従来から、複数の検知エリアに向けて投光器から赤外線のような人間の眼に見えない物体検出用の検知線を送出して、受光器により物体で反射した検知線を受けて受光信号を発生させ、この受光信号が設定レベルを超えることにより人体のような物体を検出する能動型物体検出装置が知られている。この能動型物体検出装置は、例えば自動ドア開閉のための物体検出用として自動ドアセンサに用いられる。
【0003】
この従来装置として、投光器および受光器により形成される複数の検知エリアが、自動ドアに近い位置から遠い位置に向かう前後方向、および左右方向に延びてマトリクス状に配置され、投光器により、検知エリアに向けて複数の投光素子から複数に分割されたレンズを介して物体検出用の検知線を送出させ、受光器により、物体で反射した前記検知線を複数の受光素子で同様に複数に分割されたレンズを介して受光させて、受光信号を発生させる能動型物体検出装置が挙げられる(特許文献1)。
【0004】
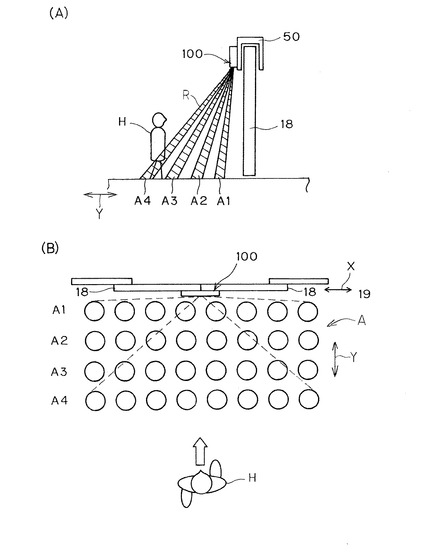
図3は検知エリアの一例を示すもので、図3(A)は自動開閉ドア18のスライド方向から見た検知エリアAの説明図、同図(B)は検知エリアAを示す平面図である。図3(A)のように、能動型物体検知装置100は無目50の側面に取り付けられ、検知エリアAは、設置された能動型物体検知装置100に近い位置から遠い位置に向かう前後方向Yに4列に配置されており、図3(B)のように、各列の検知エリアA1〜A4は、それぞれ左右方向Xに8個のエリアからなる。
【0005】
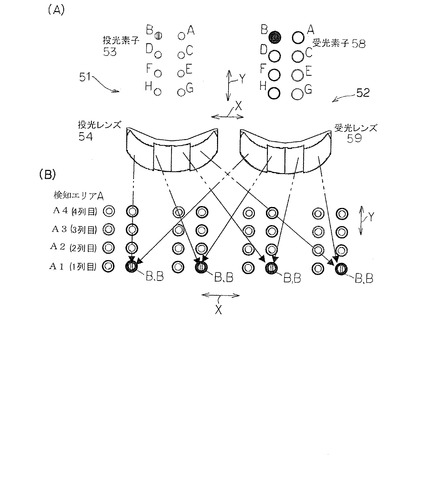
図10(A)は従来の能動型物体検知装置における投光器51と受光器52の構成、図10(B)はこの投光器51と受光器52により形成される検知エリアAを示す。図10(A)のように、投光器51により、相異なる8個(A〜H)の投光素子53から図10(B)の検知エリアAに向けて左右(横)方向Xに4分割された投光レンズ54を介して物体検出用の検知線が送出され、受光器52により、物体で反射した検知線を相異なる8個(A〜H)の受光素子58で同様に横方向Xに4分割された受光レンズ59を介して受光させて、受光信号が発生する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−92536号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、能動型物体検出装置は、上記したように赤外線などの人間の眼に見えない光線を利用して物体を検出するものであり、上記投光器および受光器により形成される複数の検知エリアも人間の眼に見えないので、物体が複数の検知エリアのどのエリアに存在しているかを特定することが本来的に難しい。
【0008】
また、検知エリア内の例えば装置真下のエリアでは、ドアの開閉による無目の振動により装置が振動し、この装置の僅かな移動によって、床が白黒などの反射量の異なるコントラストである場合には光反射の変化量が大きくなって、物体の誤検出が生じ易くなる。また、風で揺れる木や太陽光を反射する物体などが存在するエリアなどでも同様に物体の誤検出が生じ易くなる。このような場合、複数の検知エリアのうち誤検出の生じ易いエリアだけを無効にすることにより、誤検出を回避することができる。このエリア検出の制御方法としては、電気的にエリアを無効にする方法と光学的にエリアを除外する方法が知られている。
【0009】
しかし、従来装置では、図10(B)のように、複数の検知エリアAにおいて、投光器51の投光素子(A〜H)と受光器52の受光素子(A〜H)のうち、互いに同じ位置に配置された、投光素子(A〜H)からの投光レンズ54を介した光線と、受光素子(A〜H)からの受光レンズ59を介した光線とが重なっているエリアが複数存在する。例えば、投光素子Bと受光素子Bとによる光線同士が重なるエリアが4つ存在する。この4つのエリアでは電気信号が同一であるため、検知エリアAのうちどのエリアで物体を検出しているか判別できない。このため、複数の検知エリアAのうち誤検出の生じ易い所定エリアだけを無効にするように、簡単な構成かつ低コストで、電気的に個別的に検出制御することが困難であるという問題があった。
【0010】
本発明は、前記の問題点を解決して、簡単な構成かつ低コストで、容易に複数の検知エリアのうち所定エリアを電気的に個別的に検出制御ができる能動型物体検出装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明にかかる能動型物体検出装置は、複数の検知エリアに向けて複数の投光素子から投光光学系を介して物体検出用の検知線を送出する投光器と、物体で反射した前記検知線を複数の受光素子で受光光学系を介して受光して受光信号を発生する受光器と、受光信号のレベルに基づき物体を検出する制御を行う制御部とを備えた、自動開閉装置の開閉に用いられるものである。前記投光器および受光器により形成される複数の検知エリアは、自動ドアに近い位置から遠い位置に向かう前後方向、および左右方向に延びてマトリクス状に配置されている。前記投光器の投光光学系は、前後方向または左右方向に沿ってn個に区画され、前記受光器の受光光学系は、前記投光光学系が区画された方向に直交する左右方向または前後方向に沿ってm個に区画され、前記投光素子は、前記受光光学系が区画された方向にm個またはその整数倍が配置されて、前記受光素子は、前記投光光学系が区画された方向にn個またはその整数倍が配置されている。前記制御部は、前記投光光学系および受光光学系に対応する前記投光素子および受光素子を電気的に作動または不作動に切り換えて、前記複数の検知エリアのうちの所定エリアの検出制御を個別的に行うエリア個別制御手段を備えている。
【0012】
この構成によれば、投光光学系と受光光学系を、その区画された方向が互いに直交する左右方向または前後方向である特定の組み合わせとし、投光素子を受光光学系の区画された方向に沿って受光光学系の区画数と同じ数またはその整数倍だけ配列させ、受光素子を投光光学系の区画された方向に沿って投光光学系の区画数と同じ数またはその整数倍だけ配列させることにより、簡単な構成かつ低コストで、容易に複数の検知エリアのうちで物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。
【0013】
好ましくは、前記投光素子または受光素子のいずれか一方が、複数列に配置されている。したがって、より容易かつ低コストで、特定可能なエリアを増加させた検知エリアを得ることができる。
【0014】
好ましくは、前記投光光学系および受光光学系は分割レンズであって、いずれか一方が左右方向に沿って複数のレンズセグメントが配置された横分割レンズであり、他方が前後方向に沿って複数のレンズセグメントが配置された縦分割レンズである。または、前記投光光学系および受光光学系は、少なくともいずれか一方が単一のレンズと窓部を利用したプリズムの組み合わせ構造であって、光線カットフィルタである窓部をプリズムの形状とすることで、左右方向または前後方向に沿って複数に区画されている。したがって、より簡単な構成で、物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。
【0015】
好ましくは、物体の検出タイミングとその位置情報に基づいて、自動ドアの開閉維持の制御または所定エリアの有効・無効の検出制御を行う。したがって、物体の位置および方向判別ができるので、物体の移動状態に応じた有効な制御が可能となる。
【発明の効果】
【0016】
本発明は、投光光学系と受光光学系を、その区画された方向が互いに直交する左右方向または前後方向である特定の組み合わせとし、投光素子を受光光学系の区画された方向に沿って受光光学系の区画数と同じ数またはその整数倍だけ配列させ、受光素子を投光光学系の区画された方向に沿って投光光学系の区画数と同じ数またはその整数倍だけ配列させることにより、簡単な構成かつ低コストで、容易に複数の検知エリアのうち所定エリアを電気的に個別的に検出制御ができる。
【図面の簡単な説明】
【0017】
【図1】(A)は本発明の第1実施形態に係る能動型物体検知装置における投光器と受光器の構成の一例、(B)はこの投光器と受光器により形成される検知エリアを示す。
【図2】同実施形態に係る能動型物体検知装置を示す概略正面図である。
【図3】(A)は同実施形態における自動開閉ドアのスライド方向側から見た検知エリアの説明図、(B)は検知エリアを示す平面図である。
【図4】同上の能動型物体検知装置の電気的構成を示すブロック図である。
【図5】(A)〜(C)は同上の能動型物体検知装置の動作の一例を示す説明図である。
【図6】同上の能動型物体検知装置の動作の他例を示す説明図である。
【図7】(A)は第2実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。
【図8】(A)は第3実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。
【図9】(A)〜(E)は本発明の第4実施形態に係る能動型物体検知装置の投光器と受光器の構成を示す図である。
【図10】(A)は従来の能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。
【発明を実施するための形態】
【0018】
以下、本発明の好ましい実施形態について図面を参照しながら説明する。図3に示すように、本発明の第1実施形態の能動型物体検出装置100は、例えば検知線Rとして近赤外線を使用するAIR(能動型赤外線方式)センサで、無目50の側面に取り付けられている。この能動型物体検出装置100は自動開閉装置の一種である自動ドア18の開閉に用いられるものである。この検知エリアAは前記したとおり、図3(A)に示すように、例えば能動型物体検出装置100に近い位置から遠い位置に向かって前後(縦)方向Yに4列に配置されており、各列の検知エリアA1〜A4は、図3(B)に示すように、それぞれ左右(横)方向Xに8個のエリアからなる。
【0019】
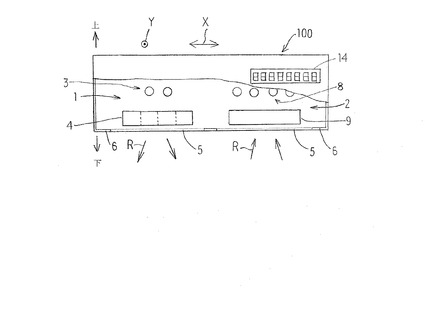
図2は、図3(A)の能動型物体検出装置100の一部破断した概略正面図を示す。図2のように、この能動型物体検出装置100は、投光器1と受光器2とが横方向Xに離間して配置され、投光器1は、装置100の下方に形成された検知エリアA(図3(B))に向けて複数の投光素子3から横方向Xに区画された投光光学系(投光レンズ)4を介して物体検出用の検知線Rを送出し、受光器2は、物体で反射した検知線Rを複数の受光素子8で縦方向Yに区画された受光光学系(受光レンズ)9を介して受光して受光信号を発生して、受光信号のレベルに基づき物体が検出される。投光レンズ4および受光レンズ9が、装置底面の窓枠6により形成された窓部5に近接して配置されている。装置100の前側外面には、後述する検知エリアオン・オフ設定手段14であるディップ(Dip)スイッチが設けられている。
【0020】
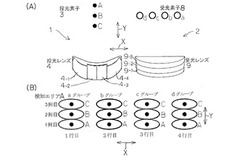
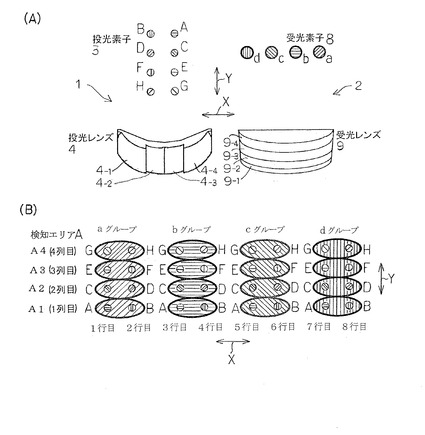
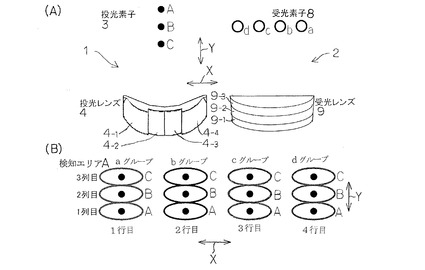
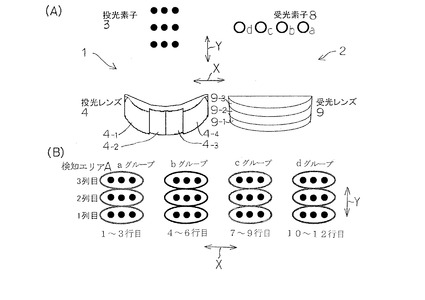
図1(A)は、本発明の第1実施形態に係る能動型物体検知装置における投光器と受光器の構成の一例、(B)はこの投光器1と受光器2により形成される検知エリアAを示す。図1(A)のように、投光器1は、横方向Xに2個、縦方向Yに4個が配置された合計8個(A〜H)の相異なる投光素子3と、各投光素子3から送出される近赤外線を、各列A1〜A4が8個のエリアを有するように、複数の例えば4つの所定パターンで投射する横方向Xに4分割されたレンズセグメント(4-1、4-2、4-3、4-4)からなる投光レンズ4とを有している。受光器2は、横方向Xに配置された相異なる4個(a〜d)の受光素子8と、各行、各列の検知エリアAから反射した近赤外線を各受光素子8に入射するよう集光する縦方向Yに4分割されたレンズセグメント(9-1、9-2、9-3、9-4)からなる受光レンズ9とを有している。
【0021】
この第1実施形態では、投光器1の投光レンズ4が横方向Xに沿ってn(4)個に分割され、受光器2の受光レンズ9が縦方向Yにm(4)個に分割されている場合に、投光器1の投光素子3は、受光器2の受光レンズ9が分割された縦方向Yにその分割数と同じ数のm(4)個と、および横方向Xにそれぞれ2個配置されて、受光器2の受光素子8は、投光器1の投光レンズ4が分割された横方向Xにその分割数と同じ数のn(4)個配置されており、投光素子3および受光素子8のうち、受光素子8が横方向Xおよび縦方向Yのうち横方向Xにのみ、つまり単列に配置されている。
【0022】
図1(B)のように、検知エリアAは、前記投光器1と受光器2を組み合わせた構成により、縦方向Yに4列(A1〜A4)に配置されるとともに、各列A1〜A4ごとにそれぞれ横方向Xに8行に配置される。各列A1〜A4は、投光素子3のA〜Hの投光に対応させたもので横方向Xにそれぞれ延びて形成され、1列目のA1はABABABAB、2列目のA2はCDCDCDCD、3列目のA3はEFEFEFEF、4列目のA4はGHGHGHGHに配置される。各行(1〜8行目)は、受光素子8の4つのa〜dの受光に対応させたもので、縦方向Yにそれぞれ延びて形成され、以下の説明の便宜上により、4つの2行(ACGE、BDFH)ずつからなる4つのa〜dグループにより形成されるものである。なお、検知エリアAは、投光レンズ4および受光レンズ9の作用により、これらの位置に対して横方向X、縦方向Yともに逆向きに形成される。
【0023】
投光レンズ4の横方向Xに4分割されたレンズセグメント(4-1、4-2、4-3、4-4)に対応して、投光素子3は、横方向Xに2個ずつが縦方向Yに4組(AB、CD、EF、GH)で合計8個装着され、受光レンズ9の縦方向Yに4分割されたレンズセグメント(9-1、9-2、9-3、9-4)に対応して、受光素子8は横方向Xに4個(a、b、c、d)装着されている。横方向Xに4分割された投光レンズ4を通して、縦方向Yに4組の投光素子3に対して、検知エリアAの4列(A1〜A4)を割り当てており、縦方向Yに4分割された受光レンズ9を通して、横方向Xに4個の受光素子8に対して、検知エリアAの各2行を有する4グループ(a〜dグループ)の8行を割り当てている。したがって、投光素子3および受光素子8は、対応する横方向Xに4分割された投光レンズ4および縦方向Yに4分割された受光レンズ9によって、4列で各列8(=2×4)行の検知エリアAを設定する。
【0024】
この場合、それぞれ投光レンズ4および受光レンズ9を介した、受光素子aおよび投光素子A〜Hに対して4列2行のaグループ、受光素子bおよび投光素子A〜Hに対して4列2行のbグループ、受光素子cおよび投光素子A〜Hに対して4列2行のcグループ、受光素子dおよび投光素子A〜Hに対して4列2行のdグループの検知エリアAが形成される。すなわち、検知エリアAにおける8行4列の32個のエリアが、それぞれ投光素子3の8個のA〜Hおよび受光素子8の4個のa〜dによって特定される。
【0025】
これにより、検知エリアAの32個のエリアでは各投光素子3および各受光素子8の組み合わせにより電気信号がそれぞれ異なるので、複数の検知エリアAのうちどのエリアで物体を検出しているか判別することができる。
【0026】
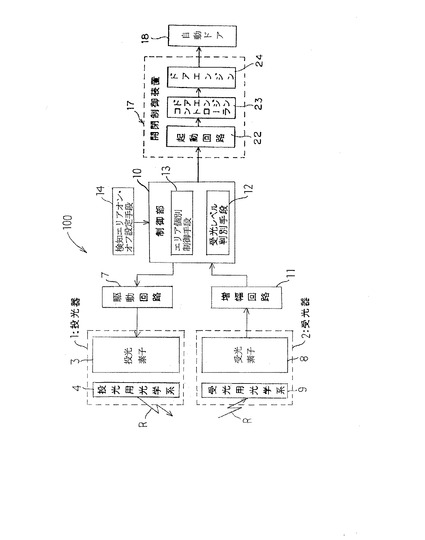
図4は本発明の第1実施形態に係る能動型物体検知装置100の電気的構成を示すブロック図である。この能動型物体検知装置100は、各投光素子3(A〜H)が、マイクロコンピュータからなる制御部10の制御を受けて駆動回路7により個々に駆動制御されて、近赤外線の検知線を検知エリアAに向けて送出する。検知エリアAから反射した近赤外線を受光した受光素子8(a〜d)から出力される受光信号は、それぞれ個々に増幅回路11で増幅されて制御部10に出力される。
【0027】
制御部10は、装置全体を制御するとともに、各受光素子8ごとに個々に入力する受光信号が設定レベルを超えているか否かを判別する受光レベル判別手段12と、前記投光レンズ4および受光レンズ9に対応する投光素子3および受光素子8を電気的に作動または不作動に切り換えて、複数の検知エリアAのうちの所定エリアの検出制御を個別的に行うエリア個別制御手段13とを備えている。エリア個別制御手段13は、例えば、図2のDipスイッチのような検知エリアオン・オフスイッチ14のオン・オフ設定に基づいて、所定エリアごとの検出制御を行う。
【0028】
このように、この能動型物体検出装置100は、横方向Xに4分割された投光レンズ4および縦方向Yに4分割された受光レンズ9の組み合わせを用い、投光素子3を縦方向Yに沿って受光レンズ9の分割数と同じ数だけ配列させ、受光素子8を横方向Xに沿って投光レンズ4の分割数と同じ数だけ配列させることにより、複数の検知エリアAのうちどのエリアで物体を検出しているか判別して、誤検出の生じ易い所定エリアだけを無効にするように当該所定エリアを電気的に個別的に検出制御することが可能となる。また、上記レンズの組み合わせを用いることにより、図10の従来の能動型物体検出装置の受光器52の受光素子58が8個であるのに対して、受光素子8を4個に削減することもできる。
【0029】
制御部10は、エリア個別制御手段13により、各投光素子3A〜3Eのうち、検知エリアオン・オフスイッチ(Dipスイッチ)14によりオンに設定された検知エリアの所定エリアに対応するもののみを駆動するよう駆動回路7に対し指令する。また、制御部10は、各受光素子8ごとに個々に入力する受光信号が設定レベルを超えているか否かを受光レベル判別手段10aにより判別して、設定レベルを超えていると判別したときに、自動ドア18の開閉制御装置17に対し物体検知信号を出力する。
【0030】
能動型物体検知装置100の外部に設置された自動ドア18の開閉制御装置17は、制御部10から物体検知信号が入力したときにドア開信号を出力する起動回路22と、自動ドア18を開閉作動させるドアエンジン24と、起動回路22からドア開信号を受けたときにドアエンジン24を開動作させるドアエンジンコントローラ23とを備えている。
【0031】
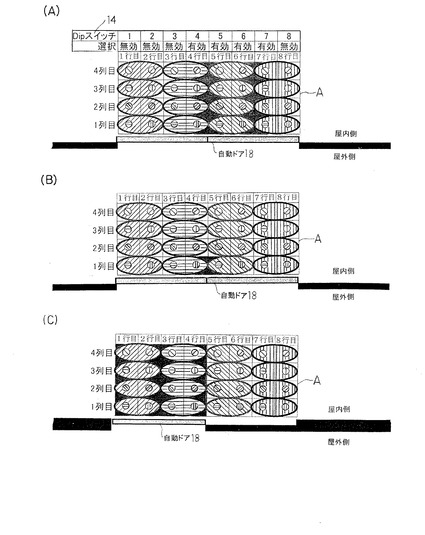
以下、上記構成の能動型物体検出装置100の動作例について説明する。図2のDipスイッチ14のオン・オフ設定に基づくエリア個別制御手段13によって、所定エリアごとの検出制御が行われる。この例では、図5(A)のように、例えば8ビットのDipスイッチ14(1〜8)に検知エリアAの1〜8行目を対応させている。図5(A)の例では、検知エリアAの1〜3、8行目が誤検出の生じ易いエリアであり、このため、Dipスイッチ14の4〜7をオンとして検知エリアAの4〜7行目を有効に、Dipスイッチ14の1〜3、8をオフとして、1〜3、8行目を無効としている。このように、各行ごとの有効、無効検出の選択が可能となる。
【0032】
図5(B)の例では、検知エリアA内の例えば装置真下のエリアで、自動ドア18の開閉による無目の振動により装置が振動し、この装置の僅かな移動により、床が白黒などの反射量の異なるコントラストであるとき光反射の変化量が大きくなって物体の誤検出が生じ易くなる場合に、自動ドア18の図示しないリミットスイッチなどを利用して、自動ドア18が閉じている間は検知エリアAの真下エリア(1列目の4行目、5行目のエリア)を投光、受光しないように、投光素子3のA、B、受光素子8のb、cを制御する。
【0033】
図5(C)の例では、戸袋を有する場合、自動ドア18が開く側について、Dipスイッチ14の1〜4をオンとして検知エリアAの1〜4行目を有効に、Dipスイッチ14の5〜8をオフとして、5〜8行目を無効としている。なお、戸袋安全用に、検知エリアAの5〜8行目で人体のような物体を検出している場合に、自動ドア18が開いて人体が当該ドアに挟まれないように、自動ドア18を開けないようにしたり、人体に対して退出を促す音声などを出力することもできる。
【0034】
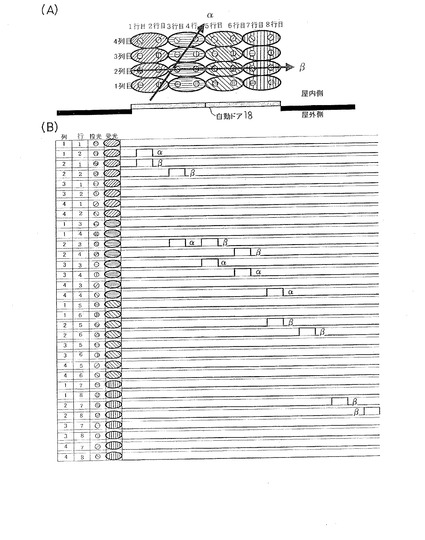
図6は、能動型物体検知装置の動作の他例を示す説明図である。(A)は、検知エリアAにおける物体の進入方向α、βを示す図、(B)は、その検出タイミングチャートを示す図である。この他例では、物体の検出タイミングとその位置情報に基づいて、自動ドア18の開閉維持の制御または所定エリアの有効・無効の検出制御を行う。(A)のように、自動ドア18を通過した後の進入方向αでは、(B)のように、順次1列・1行目、2列・3行目、3列・3行目、3列・4行目、4列・4行目と人体が検出され、自動ドア18を通過した人体に対してその位置および方向に応じて、早く自動ドア18を閉める制御を行うことができる。(A)のように、進入方向βでは、自動ドア18と平行に進入するもので、(B)のように同様に順次人体が検出され、この場合自動ドア18を開けない制御を行うことができる。これにより、物体の位置および方向判別により、物体の移動状態に応じた有効な制御が可能となる。
【0035】
また、図示しないが、検知エリアAの1列目を自動ドア18の内側に設定したドアウエイ機能時に、自動ドア18が完全閉まっているときに1列目のエリアを無効にし、自動ドア18が開き始めるとその動きに合わせて有効エリアを中央部から増加させ、逆に自動ドア18が閉まり始めると有効エリアを両端から無効にする制御が可能となる。これにより、自動ドアが閉まる直前まで安全性の確保が可能となる。
【0036】
このように、第1実施形態では、投光レンズ4と受光レンズ8を、その分割(区画)された方向が互いに直交する横方向Xと縦方向Yである特定の組み合わせとし、投光素子3を受光レンズ9の区画された縦方向Yに沿って受光レンズ9の区画数と同じ数だけ配列させ、受光素子8を投光レンズ4の区画された横方向Xに沿って投光レンズ4の区画数と同じ数だけ配列させることにより、簡単な構成かつ低コストで、容易に複数の検知エリアAのうちで物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。なお、後述するように、投光素子3を受光レンズ9の区画された縦方向Yに沿って受光レンズ9の区画数の整数倍だけ配列させ、受光素子8を投光レンズ4の区画された横方向Xに沿って投光レンズ4の区画数の整数倍だけ配列させることができる。
【0037】
図7(A)は、第2実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。図7(A)のように、この第2実施形態では、投光器1の投光レンズ4が横方向Xに沿ってn(4)個に分割され、受光器2の受光レンズ9が縦方向Yにm(3)個に分割されている場合に、投光器1の投光素子3は、受光器2の受光レンズ9が分割された縦方向Yにその分割数と同じ数のm(3)個配置されて、受光器2の受光素子8は、投光器1の投光レンズ4が分割された横方向Xにその分割数と同じ数のn(4)個配置されており、この例では投光素子3、受光素子8がそれぞれ縦方向Y、横方向Xに単列に配置されている。
【0038】
図7(A)の投光器1と受光器2の構成により、図7(B)のように、4行3列の検知エリアAが形成される。その他の構成は第1実施形態と同様である。第2実施形態では、第1実施形態と同様に、検知エリアAの12個のエリアでは各投光素子3および各受光素子8の組み合わせにより電気信号がそれぞれ異なるので、複数の検知エリアAのうちどのエリアで物体を検出しているか判別することができる。
【0039】
図8(A)は、第3実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。(A)のように、この第3実施形態では、投光器1の投光レンズ4が横方向Xに沿ってn(4)個に分割され、受光器2の受光レンズ9が縦方向Yにm(3)個に分割されている場合に、投光器1の投光素子3は、受光器2の受光レンズ9が分割された縦方向Yにその分割数と同じ数のm(3)個、および横方向Xにそれぞれ3個(合計9個)配置されて、受光器2の受光素子8は、投光器1の投光レンズ4が分割された横方向Xにその分割数と同じ数のn(4)個配置されており、受光素子8が横方向Xにのみ単列に配置されている。
【0040】
図8(A)の投光器1と受光器2の構成により、図8(B)のように、12行3列の検知エリアAが形成される。その他の構成は第1実施形態と同様である。第3実施形態では、第1実施形態と同様に、検知エリアAの36個のエリアでは各投光素子3および各受光素子8の組み合わせにより電気信号がそれぞれ異なるので、複数の検知エリアAのうちどのエリアで物体を検出しているか判別することができる。第3実施形態の投光素子3は、第2実施形態の投光素子3が縦方向Yに3個配置されたのと異なり、縦方向Yの3個、横方向Xにそれぞれ3個配置されており、横方向Xの数を増加させることにより、行数を増加させることができる。
【0041】
第3実施形態のように、第2実施形態と比べて、投光素子3の数を受光レンズ9の分割数の整数倍(3倍)に増加させると、検知エリアの個数が増加するものの、検知エリアを構成する投光エリアと受光エリアにおいて、投光エリアが大きくなって受光エリアの外に投光エリアが照射される可能性があり、検知エリアのうちで物体が検出されたエリアを特定できない場合も起こり得る。これに対応するために、受光素子8の数を投光レンズ4の分割数の整数倍に増加させて受光エリアを大きくすることができる。例えば、第3実施形態において、投光レンズ4の4分割に応じて、1分割あたり1個ずつとして受光素子8を4個だけX方向に沿って配置しているが、投光素子3の数の増加に対応するため、1分割あたり2個ずつ(電気的には1個の取り扱い)として、受光素子8を合計8個に増加してX方向に沿って配置することができる。これにより、検知エリアの個数が増加しても物体が検出されたエリアを確実に特定することが可能となる。
【0042】
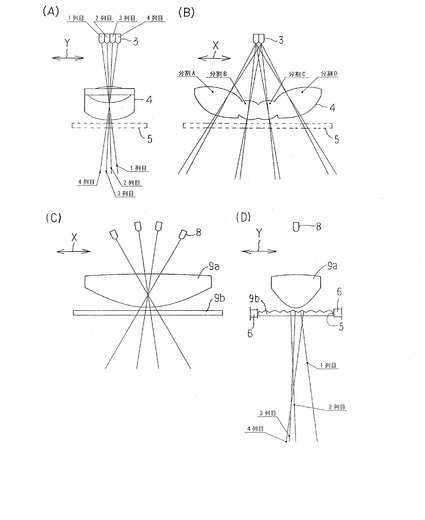
図9は本発明の第4実施形態に係る能動型物体検出装置110を示す。(A)は投光器1の側面図、(B)は投光器1の正面図、(C)は受光器2の正面図、(D)は受光器2の側面図である。この第4実施形態では、図1の第1実施形態が受光光学系に縦方向Yに分割(区画)した受光レンズ9を使用したのと異なり、それに代えて、単一の受光レンズ9aと縦方向Yに区画したプリズム9bとを使用している。その他の構成は、第1実施形態と同様である。
【0043】
この装置110では、(D)のように、可視光線カットフィルタである窓部5をプリズム9bの形状にすることにより、縦方向Yに4つに区画している。また、横方向Xに分割された投光レンズ4による横方向Xに延びるエリアに対応して、受光光学系9の受光レンズ9aは横方向Xに偏光させる例えばシリンドリカルレンズなどが好ましい。
【0044】
これにより、第4実施形態では、第1実施形態と同様に、投光光学系(投光レンズ)4と受光光学系9を、その区画された方向が互いに直交する横方向Xまたは縦方向Yである特定の組み合わせとし、投光素子3を縦方向Yに沿って受光レンズ9の区画数と同じ数だけ配列させ、受光素子8を横方向Xに沿って投光レンズ4の区画数(分割数)と同じ数だけ配列させることにより、簡単な構成かつ低コストで、容易に、複数の検知エリアAのうちで物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。
【0045】
なお、上記各実施形態では、投光器の投光光学系を横方向Xに区画、受光器の受光光学系を縦方向Yに区画したものをそれぞれ使用しているが、投光器の投光光学系を縦方向Yに区画、受光器の受光光学系を横方向Xに区画したものを使用してもよい。
【0046】
また、上記各実施形態では、複数の検知エリアAを8行4列、4行3列、12行3列としているが、これに何ら限定されず、これより行数および列数が多いもの、並びに少ない検知エリアも含まれる。さらに、投光器、受光器をそれぞれ1セットとしているが、横方向Xに2セット以上設けるようにしてもよい。
【0047】
なお、上記各実施形態では、検知線に近赤外線を使用しているが、これに限定されず、遠赤外線、または超音波、電波などを使用してもよい。さらに、本発明は、上下に開閉駆動する自動シャッタにも適用することができる。
【符号の説明】
【0048】
1:投光器
2:受光器
3:投光素子
4:投光用光学系(横方向に区画した投光レンズ)
5:窓部
8:受光素子
9:受光用光学系(縦方向に区画した受光レンズ)
13:エリア個別制御手段
14:検知エリアオン・オフ設定手段
18:自動開閉ドア(自動ドア)
100、110:能動型物体検出装置
A(A1〜A4):検知エリア
X:左右(横)方向
Y:前後(縦)方向
【技術分野】
【0001】
本発明は、複数の検知エリアに向けて物体検出用の検知線を送出して、物体で反射した検知線を受けたときに発生する受光信号が設定レベルを超えることにより人体のような物体を検出する能動型物体検出装置に関するものである。
【背景技術】
【0002】
従来から、複数の検知エリアに向けて投光器から赤外線のような人間の眼に見えない物体検出用の検知線を送出して、受光器により物体で反射した検知線を受けて受光信号を発生させ、この受光信号が設定レベルを超えることにより人体のような物体を検出する能動型物体検出装置が知られている。この能動型物体検出装置は、例えば自動ドア開閉のための物体検出用として自動ドアセンサに用いられる。
【0003】
この従来装置として、投光器および受光器により形成される複数の検知エリアが、自動ドアに近い位置から遠い位置に向かう前後方向、および左右方向に延びてマトリクス状に配置され、投光器により、検知エリアに向けて複数の投光素子から複数に分割されたレンズを介して物体検出用の検知線を送出させ、受光器により、物体で反射した前記検知線を複数の受光素子で同様に複数に分割されたレンズを介して受光させて、受光信号を発生させる能動型物体検出装置が挙げられる(特許文献1)。
【0004】
図3は検知エリアの一例を示すもので、図3(A)は自動開閉ドア18のスライド方向から見た検知エリアAの説明図、同図(B)は検知エリアAを示す平面図である。図3(A)のように、能動型物体検知装置100は無目50の側面に取り付けられ、検知エリアAは、設置された能動型物体検知装置100に近い位置から遠い位置に向かう前後方向Yに4列に配置されており、図3(B)のように、各列の検知エリアA1〜A4は、それぞれ左右方向Xに8個のエリアからなる。
【0005】
図10(A)は従来の能動型物体検知装置における投光器51と受光器52の構成、図10(B)はこの投光器51と受光器52により形成される検知エリアAを示す。図10(A)のように、投光器51により、相異なる8個(A〜H)の投光素子53から図10(B)の検知エリアAに向けて左右(横)方向Xに4分割された投光レンズ54を介して物体検出用の検知線が送出され、受光器52により、物体で反射した検知線を相異なる8個(A〜H)の受光素子58で同様に横方向Xに4分割された受光レンズ59を介して受光させて、受光信号が発生する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−92536号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、能動型物体検出装置は、上記したように赤外線などの人間の眼に見えない光線を利用して物体を検出するものであり、上記投光器および受光器により形成される複数の検知エリアも人間の眼に見えないので、物体が複数の検知エリアのどのエリアに存在しているかを特定することが本来的に難しい。
【0008】
また、検知エリア内の例えば装置真下のエリアでは、ドアの開閉による無目の振動により装置が振動し、この装置の僅かな移動によって、床が白黒などの反射量の異なるコントラストである場合には光反射の変化量が大きくなって、物体の誤検出が生じ易くなる。また、風で揺れる木や太陽光を反射する物体などが存在するエリアなどでも同様に物体の誤検出が生じ易くなる。このような場合、複数の検知エリアのうち誤検出の生じ易いエリアだけを無効にすることにより、誤検出を回避することができる。このエリア検出の制御方法としては、電気的にエリアを無効にする方法と光学的にエリアを除外する方法が知られている。
【0009】
しかし、従来装置では、図10(B)のように、複数の検知エリアAにおいて、投光器51の投光素子(A〜H)と受光器52の受光素子(A〜H)のうち、互いに同じ位置に配置された、投光素子(A〜H)からの投光レンズ54を介した光線と、受光素子(A〜H)からの受光レンズ59を介した光線とが重なっているエリアが複数存在する。例えば、投光素子Bと受光素子Bとによる光線同士が重なるエリアが4つ存在する。この4つのエリアでは電気信号が同一であるため、検知エリアAのうちどのエリアで物体を検出しているか判別できない。このため、複数の検知エリアAのうち誤検出の生じ易い所定エリアだけを無効にするように、簡単な構成かつ低コストで、電気的に個別的に検出制御することが困難であるという問題があった。
【0010】
本発明は、前記の問題点を解決して、簡単な構成かつ低コストで、容易に複数の検知エリアのうち所定エリアを電気的に個別的に検出制御ができる能動型物体検出装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明にかかる能動型物体検出装置は、複数の検知エリアに向けて複数の投光素子から投光光学系を介して物体検出用の検知線を送出する投光器と、物体で反射した前記検知線を複数の受光素子で受光光学系を介して受光して受光信号を発生する受光器と、受光信号のレベルに基づき物体を検出する制御を行う制御部とを備えた、自動開閉装置の開閉に用いられるものである。前記投光器および受光器により形成される複数の検知エリアは、自動ドアに近い位置から遠い位置に向かう前後方向、および左右方向に延びてマトリクス状に配置されている。前記投光器の投光光学系は、前後方向または左右方向に沿ってn個に区画され、前記受光器の受光光学系は、前記投光光学系が区画された方向に直交する左右方向または前後方向に沿ってm個に区画され、前記投光素子は、前記受光光学系が区画された方向にm個またはその整数倍が配置されて、前記受光素子は、前記投光光学系が区画された方向にn個またはその整数倍が配置されている。前記制御部は、前記投光光学系および受光光学系に対応する前記投光素子および受光素子を電気的に作動または不作動に切り換えて、前記複数の検知エリアのうちの所定エリアの検出制御を個別的に行うエリア個別制御手段を備えている。
【0012】
この構成によれば、投光光学系と受光光学系を、その区画された方向が互いに直交する左右方向または前後方向である特定の組み合わせとし、投光素子を受光光学系の区画された方向に沿って受光光学系の区画数と同じ数またはその整数倍だけ配列させ、受光素子を投光光学系の区画された方向に沿って投光光学系の区画数と同じ数またはその整数倍だけ配列させることにより、簡単な構成かつ低コストで、容易に複数の検知エリアのうちで物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。
【0013】
好ましくは、前記投光素子または受光素子のいずれか一方が、複数列に配置されている。したがって、より容易かつ低コストで、特定可能なエリアを増加させた検知エリアを得ることができる。
【0014】
好ましくは、前記投光光学系および受光光学系は分割レンズであって、いずれか一方が左右方向に沿って複数のレンズセグメントが配置された横分割レンズであり、他方が前後方向に沿って複数のレンズセグメントが配置された縦分割レンズである。または、前記投光光学系および受光光学系は、少なくともいずれか一方が単一のレンズと窓部を利用したプリズムの組み合わせ構造であって、光線カットフィルタである窓部をプリズムの形状とすることで、左右方向または前後方向に沿って複数に区画されている。したがって、より簡単な構成で、物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。
【0015】
好ましくは、物体の検出タイミングとその位置情報に基づいて、自動ドアの開閉維持の制御または所定エリアの有効・無効の検出制御を行う。したがって、物体の位置および方向判別ができるので、物体の移動状態に応じた有効な制御が可能となる。
【発明の効果】
【0016】
本発明は、投光光学系と受光光学系を、その区画された方向が互いに直交する左右方向または前後方向である特定の組み合わせとし、投光素子を受光光学系の区画された方向に沿って受光光学系の区画数と同じ数またはその整数倍だけ配列させ、受光素子を投光光学系の区画された方向に沿って投光光学系の区画数と同じ数またはその整数倍だけ配列させることにより、簡単な構成かつ低コストで、容易に複数の検知エリアのうち所定エリアを電気的に個別的に検出制御ができる。
【図面の簡単な説明】
【0017】
【図1】(A)は本発明の第1実施形態に係る能動型物体検知装置における投光器と受光器の構成の一例、(B)はこの投光器と受光器により形成される検知エリアを示す。
【図2】同実施形態に係る能動型物体検知装置を示す概略正面図である。
【図3】(A)は同実施形態における自動開閉ドアのスライド方向側から見た検知エリアの説明図、(B)は検知エリアを示す平面図である。
【図4】同上の能動型物体検知装置の電気的構成を示すブロック図である。
【図5】(A)〜(C)は同上の能動型物体検知装置の動作の一例を示す説明図である。
【図6】同上の能動型物体検知装置の動作の他例を示す説明図である。
【図7】(A)は第2実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。
【図8】(A)は第3実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。
【図9】(A)〜(E)は本発明の第4実施形態に係る能動型物体検知装置の投光器と受光器の構成を示す図である。
【図10】(A)は従来の能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。
【発明を実施するための形態】
【0018】
以下、本発明の好ましい実施形態について図面を参照しながら説明する。図3に示すように、本発明の第1実施形態の能動型物体検出装置100は、例えば検知線Rとして近赤外線を使用するAIR(能動型赤外線方式)センサで、無目50の側面に取り付けられている。この能動型物体検出装置100は自動開閉装置の一種である自動ドア18の開閉に用いられるものである。この検知エリアAは前記したとおり、図3(A)に示すように、例えば能動型物体検出装置100に近い位置から遠い位置に向かって前後(縦)方向Yに4列に配置されており、各列の検知エリアA1〜A4は、図3(B)に示すように、それぞれ左右(横)方向Xに8個のエリアからなる。
【0019】
図2は、図3(A)の能動型物体検出装置100の一部破断した概略正面図を示す。図2のように、この能動型物体検出装置100は、投光器1と受光器2とが横方向Xに離間して配置され、投光器1は、装置100の下方に形成された検知エリアA(図3(B))に向けて複数の投光素子3から横方向Xに区画された投光光学系(投光レンズ)4を介して物体検出用の検知線Rを送出し、受光器2は、物体で反射した検知線Rを複数の受光素子8で縦方向Yに区画された受光光学系(受光レンズ)9を介して受光して受光信号を発生して、受光信号のレベルに基づき物体が検出される。投光レンズ4および受光レンズ9が、装置底面の窓枠6により形成された窓部5に近接して配置されている。装置100の前側外面には、後述する検知エリアオン・オフ設定手段14であるディップ(Dip)スイッチが設けられている。
【0020】
図1(A)は、本発明の第1実施形態に係る能動型物体検知装置における投光器と受光器の構成の一例、(B)はこの投光器1と受光器2により形成される検知エリアAを示す。図1(A)のように、投光器1は、横方向Xに2個、縦方向Yに4個が配置された合計8個(A〜H)の相異なる投光素子3と、各投光素子3から送出される近赤外線を、各列A1〜A4が8個のエリアを有するように、複数の例えば4つの所定パターンで投射する横方向Xに4分割されたレンズセグメント(4-1、4-2、4-3、4-4)からなる投光レンズ4とを有している。受光器2は、横方向Xに配置された相異なる4個(a〜d)の受光素子8と、各行、各列の検知エリアAから反射した近赤外線を各受光素子8に入射するよう集光する縦方向Yに4分割されたレンズセグメント(9-1、9-2、9-3、9-4)からなる受光レンズ9とを有している。
【0021】
この第1実施形態では、投光器1の投光レンズ4が横方向Xに沿ってn(4)個に分割され、受光器2の受光レンズ9が縦方向Yにm(4)個に分割されている場合に、投光器1の投光素子3は、受光器2の受光レンズ9が分割された縦方向Yにその分割数と同じ数のm(4)個と、および横方向Xにそれぞれ2個配置されて、受光器2の受光素子8は、投光器1の投光レンズ4が分割された横方向Xにその分割数と同じ数のn(4)個配置されており、投光素子3および受光素子8のうち、受光素子8が横方向Xおよび縦方向Yのうち横方向Xにのみ、つまり単列に配置されている。
【0022】
図1(B)のように、検知エリアAは、前記投光器1と受光器2を組み合わせた構成により、縦方向Yに4列(A1〜A4)に配置されるとともに、各列A1〜A4ごとにそれぞれ横方向Xに8行に配置される。各列A1〜A4は、投光素子3のA〜Hの投光に対応させたもので横方向Xにそれぞれ延びて形成され、1列目のA1はABABABAB、2列目のA2はCDCDCDCD、3列目のA3はEFEFEFEF、4列目のA4はGHGHGHGHに配置される。各行(1〜8行目)は、受光素子8の4つのa〜dの受光に対応させたもので、縦方向Yにそれぞれ延びて形成され、以下の説明の便宜上により、4つの2行(ACGE、BDFH)ずつからなる4つのa〜dグループにより形成されるものである。なお、検知エリアAは、投光レンズ4および受光レンズ9の作用により、これらの位置に対して横方向X、縦方向Yともに逆向きに形成される。
【0023】
投光レンズ4の横方向Xに4分割されたレンズセグメント(4-1、4-2、4-3、4-4)に対応して、投光素子3は、横方向Xに2個ずつが縦方向Yに4組(AB、CD、EF、GH)で合計8個装着され、受光レンズ9の縦方向Yに4分割されたレンズセグメント(9-1、9-2、9-3、9-4)に対応して、受光素子8は横方向Xに4個(a、b、c、d)装着されている。横方向Xに4分割された投光レンズ4を通して、縦方向Yに4組の投光素子3に対して、検知エリアAの4列(A1〜A4)を割り当てており、縦方向Yに4分割された受光レンズ9を通して、横方向Xに4個の受光素子8に対して、検知エリアAの各2行を有する4グループ(a〜dグループ)の8行を割り当てている。したがって、投光素子3および受光素子8は、対応する横方向Xに4分割された投光レンズ4および縦方向Yに4分割された受光レンズ9によって、4列で各列8(=2×4)行の検知エリアAを設定する。
【0024】
この場合、それぞれ投光レンズ4および受光レンズ9を介した、受光素子aおよび投光素子A〜Hに対して4列2行のaグループ、受光素子bおよび投光素子A〜Hに対して4列2行のbグループ、受光素子cおよび投光素子A〜Hに対して4列2行のcグループ、受光素子dおよび投光素子A〜Hに対して4列2行のdグループの検知エリアAが形成される。すなわち、検知エリアAにおける8行4列の32個のエリアが、それぞれ投光素子3の8個のA〜Hおよび受光素子8の4個のa〜dによって特定される。
【0025】
これにより、検知エリアAの32個のエリアでは各投光素子3および各受光素子8の組み合わせにより電気信号がそれぞれ異なるので、複数の検知エリアAのうちどのエリアで物体を検出しているか判別することができる。
【0026】
図4は本発明の第1実施形態に係る能動型物体検知装置100の電気的構成を示すブロック図である。この能動型物体検知装置100は、各投光素子3(A〜H)が、マイクロコンピュータからなる制御部10の制御を受けて駆動回路7により個々に駆動制御されて、近赤外線の検知線を検知エリアAに向けて送出する。検知エリアAから反射した近赤外線を受光した受光素子8(a〜d)から出力される受光信号は、それぞれ個々に増幅回路11で増幅されて制御部10に出力される。
【0027】
制御部10は、装置全体を制御するとともに、各受光素子8ごとに個々に入力する受光信号が設定レベルを超えているか否かを判別する受光レベル判別手段12と、前記投光レンズ4および受光レンズ9に対応する投光素子3および受光素子8を電気的に作動または不作動に切り換えて、複数の検知エリアAのうちの所定エリアの検出制御を個別的に行うエリア個別制御手段13とを備えている。エリア個別制御手段13は、例えば、図2のDipスイッチのような検知エリアオン・オフスイッチ14のオン・オフ設定に基づいて、所定エリアごとの検出制御を行う。
【0028】
このように、この能動型物体検出装置100は、横方向Xに4分割された投光レンズ4および縦方向Yに4分割された受光レンズ9の組み合わせを用い、投光素子3を縦方向Yに沿って受光レンズ9の分割数と同じ数だけ配列させ、受光素子8を横方向Xに沿って投光レンズ4の分割数と同じ数だけ配列させることにより、複数の検知エリアAのうちどのエリアで物体を検出しているか判別して、誤検出の生じ易い所定エリアだけを無効にするように当該所定エリアを電気的に個別的に検出制御することが可能となる。また、上記レンズの組み合わせを用いることにより、図10の従来の能動型物体検出装置の受光器52の受光素子58が8個であるのに対して、受光素子8を4個に削減することもできる。
【0029】
制御部10は、エリア個別制御手段13により、各投光素子3A〜3Eのうち、検知エリアオン・オフスイッチ(Dipスイッチ)14によりオンに設定された検知エリアの所定エリアに対応するもののみを駆動するよう駆動回路7に対し指令する。また、制御部10は、各受光素子8ごとに個々に入力する受光信号が設定レベルを超えているか否かを受光レベル判別手段10aにより判別して、設定レベルを超えていると判別したときに、自動ドア18の開閉制御装置17に対し物体検知信号を出力する。
【0030】
能動型物体検知装置100の外部に設置された自動ドア18の開閉制御装置17は、制御部10から物体検知信号が入力したときにドア開信号を出力する起動回路22と、自動ドア18を開閉作動させるドアエンジン24と、起動回路22からドア開信号を受けたときにドアエンジン24を開動作させるドアエンジンコントローラ23とを備えている。
【0031】
以下、上記構成の能動型物体検出装置100の動作例について説明する。図2のDipスイッチ14のオン・オフ設定に基づくエリア個別制御手段13によって、所定エリアごとの検出制御が行われる。この例では、図5(A)のように、例えば8ビットのDipスイッチ14(1〜8)に検知エリアAの1〜8行目を対応させている。図5(A)の例では、検知エリアAの1〜3、8行目が誤検出の生じ易いエリアであり、このため、Dipスイッチ14の4〜7をオンとして検知エリアAの4〜7行目を有効に、Dipスイッチ14の1〜3、8をオフとして、1〜3、8行目を無効としている。このように、各行ごとの有効、無効検出の選択が可能となる。
【0032】
図5(B)の例では、検知エリアA内の例えば装置真下のエリアで、自動ドア18の開閉による無目の振動により装置が振動し、この装置の僅かな移動により、床が白黒などの反射量の異なるコントラストであるとき光反射の変化量が大きくなって物体の誤検出が生じ易くなる場合に、自動ドア18の図示しないリミットスイッチなどを利用して、自動ドア18が閉じている間は検知エリアAの真下エリア(1列目の4行目、5行目のエリア)を投光、受光しないように、投光素子3のA、B、受光素子8のb、cを制御する。
【0033】
図5(C)の例では、戸袋を有する場合、自動ドア18が開く側について、Dipスイッチ14の1〜4をオンとして検知エリアAの1〜4行目を有効に、Dipスイッチ14の5〜8をオフとして、5〜8行目を無効としている。なお、戸袋安全用に、検知エリアAの5〜8行目で人体のような物体を検出している場合に、自動ドア18が開いて人体が当該ドアに挟まれないように、自動ドア18を開けないようにしたり、人体に対して退出を促す音声などを出力することもできる。
【0034】
図6は、能動型物体検知装置の動作の他例を示す説明図である。(A)は、検知エリアAにおける物体の進入方向α、βを示す図、(B)は、その検出タイミングチャートを示す図である。この他例では、物体の検出タイミングとその位置情報に基づいて、自動ドア18の開閉維持の制御または所定エリアの有効・無効の検出制御を行う。(A)のように、自動ドア18を通過した後の進入方向αでは、(B)のように、順次1列・1行目、2列・3行目、3列・3行目、3列・4行目、4列・4行目と人体が検出され、自動ドア18を通過した人体に対してその位置および方向に応じて、早く自動ドア18を閉める制御を行うことができる。(A)のように、進入方向βでは、自動ドア18と平行に進入するもので、(B)のように同様に順次人体が検出され、この場合自動ドア18を開けない制御を行うことができる。これにより、物体の位置および方向判別により、物体の移動状態に応じた有効な制御が可能となる。
【0035】
また、図示しないが、検知エリアAの1列目を自動ドア18の内側に設定したドアウエイ機能時に、自動ドア18が完全閉まっているときに1列目のエリアを無効にし、自動ドア18が開き始めるとその動きに合わせて有効エリアを中央部から増加させ、逆に自動ドア18が閉まり始めると有効エリアを両端から無効にする制御が可能となる。これにより、自動ドアが閉まる直前まで安全性の確保が可能となる。
【0036】
このように、第1実施形態では、投光レンズ4と受光レンズ8を、その分割(区画)された方向が互いに直交する横方向Xと縦方向Yである特定の組み合わせとし、投光素子3を受光レンズ9の区画された縦方向Yに沿って受光レンズ9の区画数と同じ数だけ配列させ、受光素子8を投光レンズ4の区画された横方向Xに沿って投光レンズ4の区画数と同じ数だけ配列させることにより、簡単な構成かつ低コストで、容易に複数の検知エリアAのうちで物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。なお、後述するように、投光素子3を受光レンズ9の区画された縦方向Yに沿って受光レンズ9の区画数の整数倍だけ配列させ、受光素子8を投光レンズ4の区画された横方向Xに沿って投光レンズ4の区画数の整数倍だけ配列させることができる。
【0037】
図7(A)は、第2実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。図7(A)のように、この第2実施形態では、投光器1の投光レンズ4が横方向Xに沿ってn(4)個に分割され、受光器2の受光レンズ9が縦方向Yにm(3)個に分割されている場合に、投光器1の投光素子3は、受光器2の受光レンズ9が分割された縦方向Yにその分割数と同じ数のm(3)個配置されて、受光器2の受光素子8は、投光器1の投光レンズ4が分割された横方向Xにその分割数と同じ数のn(4)個配置されており、この例では投光素子3、受光素子8がそれぞれ縦方向Y、横方向Xに単列に配置されている。
【0038】
図7(A)の投光器1と受光器2の構成により、図7(B)のように、4行3列の検知エリアAが形成される。その他の構成は第1実施形態と同様である。第2実施形態では、第1実施形態と同様に、検知エリアAの12個のエリアでは各投光素子3および各受光素子8の組み合わせにより電気信号がそれぞれ異なるので、複数の検知エリアAのうちどのエリアで物体を検出しているか判別することができる。
【0039】
図8(A)は、第3実施形態に係る能動型物体検知装置における投光器と受光器の構成、(B)はこの投光器と受光器により形成される検知エリアを示す。(A)のように、この第3実施形態では、投光器1の投光レンズ4が横方向Xに沿ってn(4)個に分割され、受光器2の受光レンズ9が縦方向Yにm(3)個に分割されている場合に、投光器1の投光素子3は、受光器2の受光レンズ9が分割された縦方向Yにその分割数と同じ数のm(3)個、および横方向Xにそれぞれ3個(合計9個)配置されて、受光器2の受光素子8は、投光器1の投光レンズ4が分割された横方向Xにその分割数と同じ数のn(4)個配置されており、受光素子8が横方向Xにのみ単列に配置されている。
【0040】
図8(A)の投光器1と受光器2の構成により、図8(B)のように、12行3列の検知エリアAが形成される。その他の構成は第1実施形態と同様である。第3実施形態では、第1実施形態と同様に、検知エリアAの36個のエリアでは各投光素子3および各受光素子8の組み合わせにより電気信号がそれぞれ異なるので、複数の検知エリアAのうちどのエリアで物体を検出しているか判別することができる。第3実施形態の投光素子3は、第2実施形態の投光素子3が縦方向Yに3個配置されたのと異なり、縦方向Yの3個、横方向Xにそれぞれ3個配置されており、横方向Xの数を増加させることにより、行数を増加させることができる。
【0041】
第3実施形態のように、第2実施形態と比べて、投光素子3の数を受光レンズ9の分割数の整数倍(3倍)に増加させると、検知エリアの個数が増加するものの、検知エリアを構成する投光エリアと受光エリアにおいて、投光エリアが大きくなって受光エリアの外に投光エリアが照射される可能性があり、検知エリアのうちで物体が検出されたエリアを特定できない場合も起こり得る。これに対応するために、受光素子8の数を投光レンズ4の分割数の整数倍に増加させて受光エリアを大きくすることができる。例えば、第3実施形態において、投光レンズ4の4分割に応じて、1分割あたり1個ずつとして受光素子8を4個だけX方向に沿って配置しているが、投光素子3の数の増加に対応するため、1分割あたり2個ずつ(電気的には1個の取り扱い)として、受光素子8を合計8個に増加してX方向に沿って配置することができる。これにより、検知エリアの個数が増加しても物体が検出されたエリアを確実に特定することが可能となる。
【0042】
図9は本発明の第4実施形態に係る能動型物体検出装置110を示す。(A)は投光器1の側面図、(B)は投光器1の正面図、(C)は受光器2の正面図、(D)は受光器2の側面図である。この第4実施形態では、図1の第1実施形態が受光光学系に縦方向Yに分割(区画)した受光レンズ9を使用したのと異なり、それに代えて、単一の受光レンズ9aと縦方向Yに区画したプリズム9bとを使用している。その他の構成は、第1実施形態と同様である。
【0043】
この装置110では、(D)のように、可視光線カットフィルタである窓部5をプリズム9bの形状にすることにより、縦方向Yに4つに区画している。また、横方向Xに分割された投光レンズ4による横方向Xに延びるエリアに対応して、受光光学系9の受光レンズ9aは横方向Xに偏光させる例えばシリンドリカルレンズなどが好ましい。
【0044】
これにより、第4実施形態では、第1実施形態と同様に、投光光学系(投光レンズ)4と受光光学系9を、その区画された方向が互いに直交する横方向Xまたは縦方向Yである特定の組み合わせとし、投光素子3を縦方向Yに沿って受光レンズ9の区画数と同じ数だけ配列させ、受光素子8を横方向Xに沿って投光レンズ4の区画数(分割数)と同じ数だけ配列させることにより、簡単な構成かつ低コストで、容易に、複数の検知エリアAのうちで物体が検出されたエリアを特定でき、所定エリアについての有効・無効の検出制御を電気的に個別的に行うことができる。
【0045】
なお、上記各実施形態では、投光器の投光光学系を横方向Xに区画、受光器の受光光学系を縦方向Yに区画したものをそれぞれ使用しているが、投光器の投光光学系を縦方向Yに区画、受光器の受光光学系を横方向Xに区画したものを使用してもよい。
【0046】
また、上記各実施形態では、複数の検知エリアAを8行4列、4行3列、12行3列としているが、これに何ら限定されず、これより行数および列数が多いもの、並びに少ない検知エリアも含まれる。さらに、投光器、受光器をそれぞれ1セットとしているが、横方向Xに2セット以上設けるようにしてもよい。
【0047】
なお、上記各実施形態では、検知線に近赤外線を使用しているが、これに限定されず、遠赤外線、または超音波、電波などを使用してもよい。さらに、本発明は、上下に開閉駆動する自動シャッタにも適用することができる。
【符号の説明】
【0048】
1:投光器
2:受光器
3:投光素子
4:投光用光学系(横方向に区画した投光レンズ)
5:窓部
8:受光素子
9:受光用光学系(縦方向に区画した受光レンズ)
13:エリア個別制御手段
14:検知エリアオン・オフ設定手段
18:自動開閉ドア(自動ドア)
100、110:能動型物体検出装置
A(A1〜A4):検知エリア
X:左右(横)方向
Y:前後(縦)方向
【特許請求の範囲】
【請求項1】
複数の検知エリアに向けて複数の投光素子から投光光学系を介して物体検出用の検知線を送出する投光器と、物体で反射した前記検知線を複数の受光素子で受光光学系を介して受光して受光信号を発生する受光器と、受光信号のレベルに基づき物体を検出する制御を行う制御部とを備えた、自動開閉装置の開閉に用いられる能動型物体検出装置であって、
前記投光器および受光器により形成される複数の検知エリアは、自動ドアに近い位置から遠い位置に向かう前後方向、および左右方向に延びてマトリクス状に配置されており、
前記投光器の投光光学系は、前後方向または左右方向に沿ってn個に区画され、前記受光器の受光光学系は、前記投光光学系が区画された方向に直交する左右方向または前後方向に沿ってm個に区画され、前記投光素子は、前記受光光学系が区画された方向にm個またはその整数倍が配置されて、前記受光素子は、前記投光光学系が区画された方向にn個またはその整数倍が配置されており、
前記制御部は、前記投光光学系および受光光学系に対応する前記投光素子および受光素子を電気的に作動または不作動に切り換えて、前記複数の検知エリアのうちの所定エリアの検出制御を個別的に行うエリア個別制御手段を備えている、
能動型物体検出装置。
【請求項2】
請求項1において、
前記投光素子または受光素子のいずれか一方が、複数列に配置されている、能動型物体検出装置。
【請求項3】
請求項1または2において、
前記投光光学系および受光光学系は分割レンズであって、いずれか一方が左右方向に沿って複数のレンズセグメントが配置された横分割レンズであり、他方が前後方向に沿って複数のレンズセグメントが配置された縦分割レンズである、
能動型物体検出装置。
【請求項4】
請求項1または2において、
前記投光光学系および受光光学系は、少なくともいずれか一方が単一のレンズと窓部を利用したプリズムの組み合わせ構造であって、光線カットフィルタである窓部をプリズムの形状とすることで、左右方向または前後方向に沿って複数に区画された、能動型物体検出装置。
【請求項5】
請求項1から4のいずれか1項において、物体の検出タイミングとその位置情報に基づいて、自動ドアの開閉維持の制御または所定エリアの有効・無効の検出制御を行う、能動型物体検出装置。
【請求項1】
複数の検知エリアに向けて複数の投光素子から投光光学系を介して物体検出用の検知線を送出する投光器と、物体で反射した前記検知線を複数の受光素子で受光光学系を介して受光して受光信号を発生する受光器と、受光信号のレベルに基づき物体を検出する制御を行う制御部とを備えた、自動開閉装置の開閉に用いられる能動型物体検出装置であって、
前記投光器および受光器により形成される複数の検知エリアは、自動ドアに近い位置から遠い位置に向かう前後方向、および左右方向に延びてマトリクス状に配置されており、
前記投光器の投光光学系は、前後方向または左右方向に沿ってn個に区画され、前記受光器の受光光学系は、前記投光光学系が区画された方向に直交する左右方向または前後方向に沿ってm個に区画され、前記投光素子は、前記受光光学系が区画された方向にm個またはその整数倍が配置されて、前記受光素子は、前記投光光学系が区画された方向にn個またはその整数倍が配置されており、
前記制御部は、前記投光光学系および受光光学系に対応する前記投光素子および受光素子を電気的に作動または不作動に切り換えて、前記複数の検知エリアのうちの所定エリアの検出制御を個別的に行うエリア個別制御手段を備えている、
能動型物体検出装置。
【請求項2】
請求項1において、
前記投光素子または受光素子のいずれか一方が、複数列に配置されている、能動型物体検出装置。
【請求項3】
請求項1または2において、
前記投光光学系および受光光学系は分割レンズであって、いずれか一方が左右方向に沿って複数のレンズセグメントが配置された横分割レンズであり、他方が前後方向に沿って複数のレンズセグメントが配置された縦分割レンズである、
能動型物体検出装置。
【請求項4】
請求項1または2において、
前記投光光学系および受光光学系は、少なくともいずれか一方が単一のレンズと窓部を利用したプリズムの組み合わせ構造であって、光線カットフィルタである窓部をプリズムの形状とすることで、左右方向または前後方向に沿って複数に区画された、能動型物体検出装置。
【請求項5】
請求項1から4のいずれか1項において、物体の検出タイミングとその位置情報に基づいて、自動ドアの開閉維持の制御または所定エリアの有効・無効の検出制御を行う、能動型物体検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−72863(P2013−72863A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214657(P2011−214657)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000103736)オプテックス株式会社 (116)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000103736)オプテックス株式会社 (116)
[ Back to top ]