
脱穀装置
【課題】扱室内の処理物から受ける負荷によりスプリングの付勢力に抗して退避回動する送塵ガイドにあって、該付勢力を調節して初期開度を調節する操作が面倒である。
【解決手段】アクチュエータ46が駆動制御されることで、送塵ガイド27と一体となって回動するアームプレート37に作用するスプリング39の付勢力が増減し、送塵ガイド27の初期開度位置が調節される(第2の調節手段)。該第2の調節手段による初期開度位置を基準に、送塵ガイド27は、処理物からの負荷とスプリング39の付勢力が平衡する位置に自律的に回動して、その退避角度を調節する(第1の調節手段)。
【解決手段】アクチュエータ46が駆動制御されることで、送塵ガイド27と一体となって回動するアームプレート37に作用するスプリング39の付勢力が増減し、送塵ガイド27の初期開度位置が調節される(第2の調節手段)。該第2の調節手段による初期開度位置を基準に、送塵ガイド27は、処理物からの負荷とスプリング39の付勢力が平衡する位置に自律的に回動して、その退避角度を調節する(第1の調節手段)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンバイン,ハーベスタ等に用いられる脱穀装置に係り、詳しくは扱室内面側に設けられ、扱室内に流動する処理物をガイドして処理物の移送速度を調節する送塵ガイドに関する。
【背景技術】
【0002】
従来、扱室の内面側に、扱室内を流動する処理物に接触して処理物の移送速度を調節する送塵ガイドを配設した脱穀装置が知られている。該送塵ガイドは、回動支軸に回動自在に支持され、前記送塵ガイドは、開度を調節されて、扱室内の処理物の移送速度を調節し得る(特許文献1,2参照)。
【0003】
特許文献1記載のものは、前記送塵ガイドにスプリングを接続して、該送塵ガイドが、扱胴の回転に伴いスパイラル状に移送される処理物に接触し、該処理物からの押圧力(負荷)と上記スプリングによる付勢力が平衡するようにその向き(開度)が調節され、処理物からの負荷に応じてその移送速度を自動的に調節する。
【0004】
特許文献2記載のものは、穀粒タンクへ穀粒を送出する投口に設けられた投口センサで回収された穀粒量から閾値を設定し、排塵口及び排気通路に設けられた排出量検出センサで検出された穀粒量が設定された閾値以上である場合に、送塵ガイドをモータにより開度調節されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−222124号公報
【特許文献2】特開2010−187641号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
送塵ガイドの回動制御をスプリングによって行う特許文献1記載のものは、送塵ガイドの初期開度を設定する操作具が脱穀部の上部にあり、操作性が悪く操作が面倒であった。特に、大型のコンバインであると、作業者が上記操作具に手が直接届き難く、送塵ガイドの開度が適切に設定されていない虞があり、かつ運転中には送塵ガイドの初期位置の変更は困難であった。
【0007】
また、特許文献2のものは、投口センサで検出した穀粒量に従ってモータ駆動により送塵ガイドを自動制御するので、操作性や送塵ガイドの最適な開度を設定するのには優れていても、例えば、穀稈が塊となって扱室に流入するなどして急に脱穀負荷が増大した時には対応が遅く、即時的な脱穀負荷対応が不可能であった。
【0008】
そこで、本発明は、送塵ガイドの初期開度の設定を簡便にし、更に、急に脱穀負荷が増大してもその脱穀負荷に応じて即時に開度調節できるように送塵ガイドの回動制御を行って、もって上述した課題を解決した脱穀装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、扱室(9)内に、送塵ガイド(29)を配置した脱穀装置(7)において、
前記扱室(9)内の処理物から受ける負荷に対応して前記送塵ガイド(29)の角度を調節する第1の調節手段(39)と、
前記第1の調節手段(39)による初期開度位置をアクチュエータ(46)により設定する第2の調節手段(41,56)と、を備えてなる。
【0010】
前記第1の調節手段(39)は、前記処理物から受ける負荷に対応した付勢力を前記送塵ガイド(29)に作用するスプリング(39)である。
【0011】
前記第1の調節手段(39)による前記送塵ガイド(29)の角度を検出するセンサ(48)と、該センサ(48)の検出結果に基づき脱穀負荷が過負荷状態かを判定する判定手段(50)と、該判定手段が過負荷と判断した場合、前記第2の調節手段(41,56)を、前記送塵ガイド(29)が開き側となるように制御する制御部(50)と、を備えてなる。
【0012】
なお、上記カッコ内の符号は、図面と対照するためのものであるが、これにより特許請求の範囲の記載に何等影響を及ぼすものではない。
【発明の効果】
【0013】
請求項1に係る本発明によると、送塵ガイドは、処理物から受ける負荷に対応して前記送塵ガイドの角度を調節する第1の調節手段と、第1の調節手段による初期開度位置をアクチュエータにより設定する第2の調節手段と、を備えたので、第1の調節手段により、扱室内に流入してくる処理物から受ける負荷に応じて送塵ガイドの開度が自動調節され、かつ第2の調節手段をアクチュエータにより操作して、上記送塵ガイドの初期開度を容易に調節することができる。
【0014】
請求項2に係る本発明によると、第1の調節手段は、処理物から受ける負荷に対応した付勢力を送塵ガイドに作用するスプリングであるので、比較的簡易な構造で、送塵ガイドは処理物からの負荷に応じて退避回動し、適切に脱穀負荷を調節できる。
【0015】
請求項3に係る本発明によると、送塵ガイドの角度を検出するセンサの検出結果に基づき、送塵ガイドに作用する脱穀負荷が過負荷状態だと判定された場合、前記第2の調節手段を、前記送塵ガイドが開き側となるように制御するので、煩わしい操作をしなくても自動的に送塵ガイドに作用する負荷を軽減し、脱穀負荷を少なくして、所要動力を低減し、省エネ効果を向上することができる。
【図面の簡単な説明】
【0016】
【図1】本発明を適用した脱穀装置を搭載したコンバインを示す平面図。
【図2】その脱穀装置部分を示す平面図。
【図3】その脱穀装置の扱室部分を示す断面図。
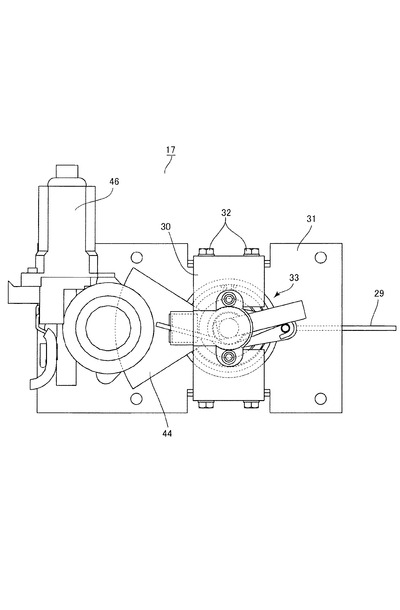
【図4】その送塵ガイド装置を示す平面図。
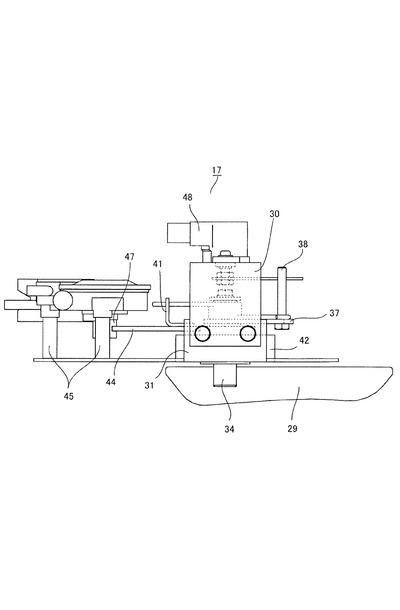
【図5】その正面図。
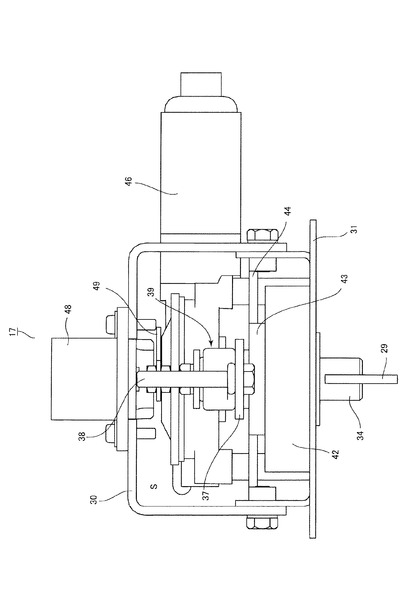
【図6】その側面図。
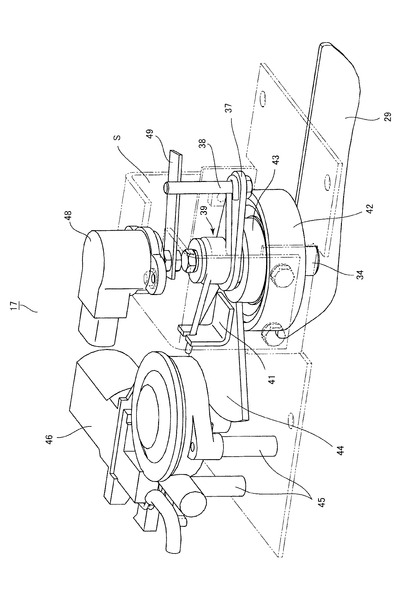
【図7】その斜視図。
【図8】その断面図。
【図9】その制御を示すブロック図。
【図10】そのフローチャート。
【図11】外の実施の形態による送塵ガイド装置を示す平面図。
【発明を実施するための形態】
【0017】
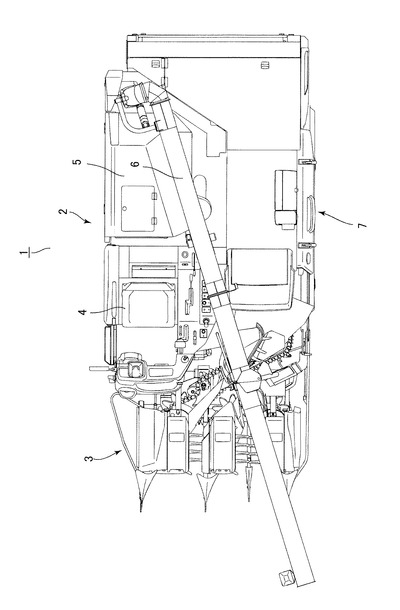
以下、図面に沿って、本発明の実施の形態について説明する。コンバイン1は、図1に示すように、クローラにより支持される走行機体2を有しており、該走行機体2の前方には前処理部3が昇降自在に配置されている。走行機体2は、その一側に運転操作部4及びエンジンが配置され、その後方にグレンタンク5及び該グレンタンク内の穀粒を排出する排出オーガ6が配置されており、他側に脱穀装置7が配置されている。
【0018】
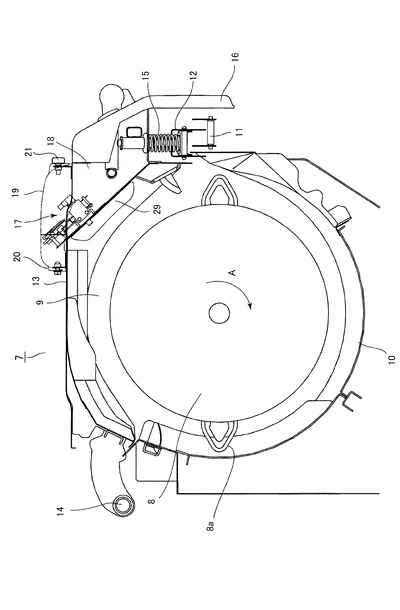
脱穀装置7は、図2及び図3に示すように、上部に扱胴8を内蔵した扱室9を有しており、該扱室9は、受網10により選別部と区画されている。扱室9の外側にはフィードチェーン11が配設されており、挟持レール12との間に穀稈を挟持して搬送し得る。扱室9の上方は、脱穀カバー13で覆われており、該脱穀カバー13は、機体内側の枢支軸14に回動自在に支持され、扱胴8と共に扱室9の上方を開放し得る。上記脱穀カバー13の外側は、前記挟持レール12がスプリング15に付勢されて配置されていると共に、レールカバー16が配置されている。
【0019】
前記脱穀カバー13の上部外側角部は、本発明に係る前後の送塵ガイド装置17,17を収納するための凹部18が形成されており、該凹部18の上方はカバー体19が固定ボルト20及びノブ21により取外し自在に取付けられている。前記カバー体19は、ヒンジ構造となっており、ノブ21を外すことにより外側を開放し得る。
【0020】
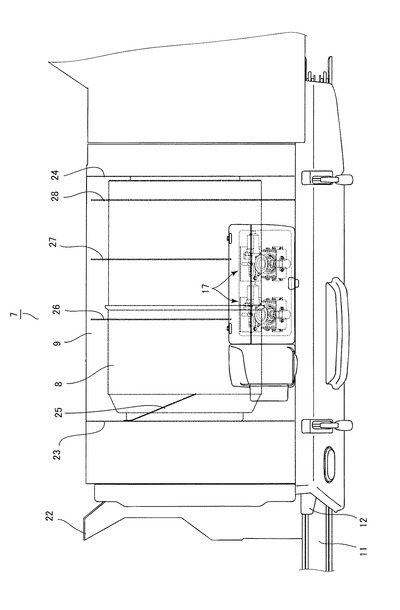
扱室9は、図2に示すように、その前側に扱室入口版22が設けられており、扱室前側板23と扱室後側版24にて扱胴8が支持されている。脱穀カバー13の扱室9内側には、第1固定ガイド25、第2固定ガイド26、第3固定ガイド27及び第4固定ガイド28が設けられており、また上記凹部18には、扱胴軸方向に2個の送塵ガイド装置17,17が並設されている。扱胴8は、多数の扱歯8aを有しており、図3の矢印A方向に回転して、上記扱歯8aにより穀稈から脱穀された穀粒及び藁屑等からなる処理物が、扱室9内にて上記扱胴8に連れ回されつつ前方から後方に向けてスパイラル状に移送される。該処理物の移送に際して、前記第1〜4固定ガイド25〜28並びに送塵ガイド装置17,17の送塵ガイド29,29が上記処理物の流れを制御する。なお、本発明の実施の形態例では同じ構造からなる2個の送塵ガイド装置17,17が配設されているが、1つでも複数であってもよく、該送塵ガイド装置17,17は同じ構造からなるため、一方のみを説明して他方の説明を省略する。
【0021】
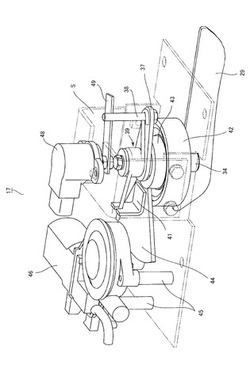
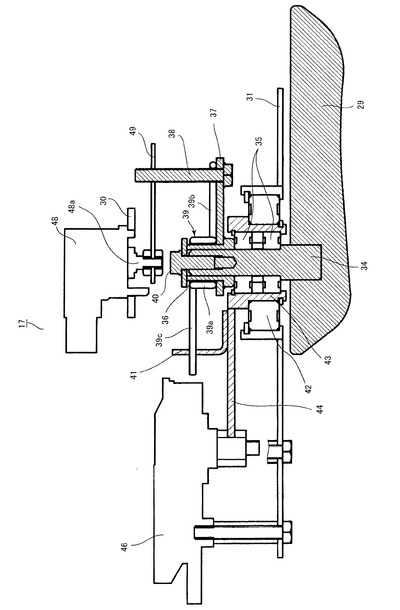
ついで、本発明の要部である上記送塵ガイド装置17,17について、図4ないし図8に沿って説明する。該送塵ガイド装置17は、上プレート30を下プレート31にボルト32で固定してその内部に空間Sを形成し、該空間Sに作動部33が配置されている。また、上記下プレート31の底部は、上記凹部18の底面である脱穀カバー13にボルトにより固定される。
【0022】
送塵ガイド29は、平板状のプレートからなり、その長手方向の一方(扱胴の回転方向上流側)に偏倚した位置に回動支軸34が固定されており、該回動支軸34は、下プレート31に上下に配置されたベアリング35,35を貫通して延びており、扱室9内において上記送塵ガイド29が回動調節自在に固定されている。上記回動支軸34には、上記ベアリング35,35の上部にボス36が回転不能に嵌合されており、該ボス36にはアームプレート37が一体に固定されて、該アームプレート37の先端にピン38が植設されている。上記ボス36にはねじりコイルスプリング39のコイル部39aが嵌挿されて、上記回動支軸34に螺着されたボルト40及びワッシャによりボス36及びスプリング39が抜止めされている。
【0023】
上記スプリング39の一端アーム部39bは、上記ピン38に引っ掛けられて係止されており、他端アーム部39cは、開度設定用の係止部材41に係止されている。
【0024】
前記下プレート31には、ベアリング42を介してそのインナレースからなるボス部43が回転自在に支持されており、該ボス部43の内部に上記ベアリング35,35を介して回転支軸34が支持されている。上記ボス部43にはセクタギヤ44が一体に固定され、該セクタギヤ44は、その上部に上記スプリング39のアーム部39cを固定するための溝を有するL字状の前記係止部材41が一体に固定されると共に、上記下プレート31にボルト及びカラー45を介して支持されるモータ(アクチュエータ)46の出力軸に備えたモータ出力ギヤ47(ピニオン)と噛合し、モータ46の正逆駆動により前記セクタギヤ44を所定回動位置に調節しうる。
【0025】
従って、前記係止部材41が、第1の調節手段を構成するスプリング39を介して、上記送塵ガイドの初期開度位置を設定する第2の調節手段を構成し、該第2の調節手段(41)は、前記モータ46からなるアクチュエータにより調節され、かつ該アクチュエータ46は、例えば運転操作部4に配置されたスイッチ又はセンサによる自動制御により制御される。なお、アクチュエータ46は、電気モータに限らず、油圧モータ、伝動リニアアクチュエータ、油圧リニアアクチュエータ等の他のアクチュエータでもよく、上記センサは、本実施の形態例においては車速センサを用いているが、車速センサに限らず、搬送穀稈量や扱胴回転数など、要は脱穀負荷がどのくらいかということを検出できるセンサなら何でもよい。
【0026】
前記上プレート30の上部にはポテンショメータ48が配設され、該ポテンショメータ48は該上プレート30の下側(上記空間S側)に突出する検出軸48aを有しており、該検出軸48a及び送塵ガイドの回動支点(回動支軸34)と回動支点が一致するようにポテンショアーム49が一体に固定されている。該ポテンショアーム49が、上記送塵ガイド29と一体となって回動する上記ピン38と接当することで、送塵ガイド29の回動角が検知可能となっている。
【0027】
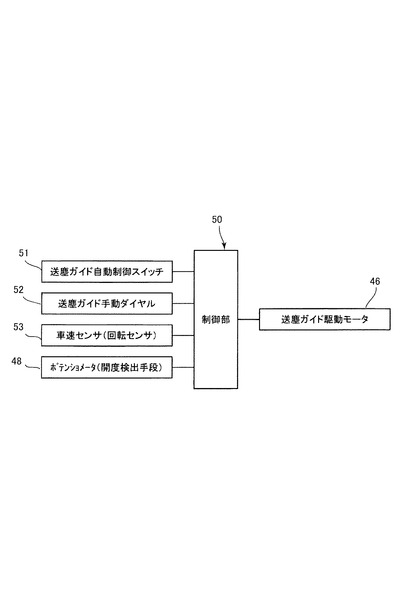
図9は、本実施の形態における制御ブロック図を示しており、コンバイン1は、マイコン(CPU,ROM,RAM等を含む)からなり該制御ブロック図を構成する制御部50を備えている。該制御部50には、上記送塵ガイド29の開度設定を車速に応じて自動で行うか否かの送塵ガイド自動制御スイッチ51、該スイッチ51がオフの時に手動で前記送塵ガイド29の開度を変更可能な送塵ガイド手動ダイヤル52、車速を検出する車速センサ53、及び上記送塵ガイド29の退避角度を検出する上記ポテンショメータ48からの信号が入力され、上記スイッチ51及びダイヤル52は、上記運転操作部4に配置される。これらの信号を受けて、上記制御部50はモータ46を駆動制御して、上記送塵ガイド29の開度を設定する。
【0028】
本実施の形態は、以上のような構成からなるので、コンバイン1の作業に基づき、刈取られた穀稈は挟持レール12に挟まれた状態でフィードチェーン11により前側から後側に搬送され、扱室9内に運ばれる。脱穀装置7の扱胴8が矢印A方向に回転している状態では、運ばれた穀稈は、その穂先部が扱胴8で脱穀処理され、脱穀された穀粒やワラ屑は扱胴8に連れ回されて回転しつつスパイラル状に前方から後方に移送されて脱粒処理される。脱穀された穀粒、ワラ屑等の処理物は、各固定ガイド25〜28及び送塵ガイド29,29に案内されつつ、前側から後側に移送され、これら処理物の移送速度は送塵ガイド29,29の開度によって調節される。
【0029】
自動制御スイッチ51をオンにした自動制御の場合には、車速センサ53が車速を検出し、その信号を受け取った制御部50がその車速に応じてモータ46の正逆駆動を制御する。即ち、車速が遅い場合には扱室9に流入する処理物の量が少ないので、送塵ガイド29を比較的閉じ側へ、車速が早い場合には扱室9に流入する処理物の量が多いので、比較的開き側に、例えば9段階に送塵ガイド29の初期開度調節を自動的に行う。
【0030】
上記自動制御スイッチ51をオフにした場合には、上記自動制御が切られて手動制御状態となる。該手動制御にあっては、上記運転操作部4に配置された送塵ガイド手動ダイヤル52を操作することによって、その信号を受け取った制御部50がモータ46の正逆駆動を制御し、作業中でも容易に送塵ガイド29の初期開度を調節することができる。
【0031】
上記自動制御又は手動制御にあって、上記制御部50からの信号が上記駆動モータ46に出力されて、該モータ46を正転又は逆転する。該モータ46の正逆回転により上記セクタギヤ44と一体の上記係止部材41が回動し、上記スプリング39を介して上記送塵ガイド29と一体に回動するピン38が回動して、その回動角を上記ポテンショメータ48が検出し、制御部50が送塵ガイド29の初期開度位置を調節制御する(第2の調節手段)。
【0032】
送塵ガイド29が開き側にあると、処理物の前から後への移送速度が速くなり、送塵ガイド29が閉じ側にあると、処理物の移送速度が遅くなり、その分扱室9内に溜まる処理物の時間(脱穀時間)が長くなる。扱胴8の回転に伴う前記処理物のスパイラル状の移送により、送塵ガイド29には処理物からの押圧力(負荷)が作用し、扱室9内の処理物が多いと上記負荷も増大する。そして上記送塵ガイド29は、上記第2の調節手段による初期開度位置を基準に処理物からの負荷とスプリング39の付勢力が平衡する位置に自律的に回動して、扱室9内の処理物の量及び濡れ材等による処理物の状況に基づく処理物からの負荷に応じて、その退避角度を調節する(第1の調節手段)。
【0033】
なお、モータ駆動を伝動するセクタギヤ44が上プレート30と接当することでその回動範囲が規制され、送塵ガイド29の初期開度の上限及び下限が規制される。また、ポテンショアーム49も同様にして上プレート30と接当することで、上記送塵ガイド29の最大退避角度が規制される。
【0034】
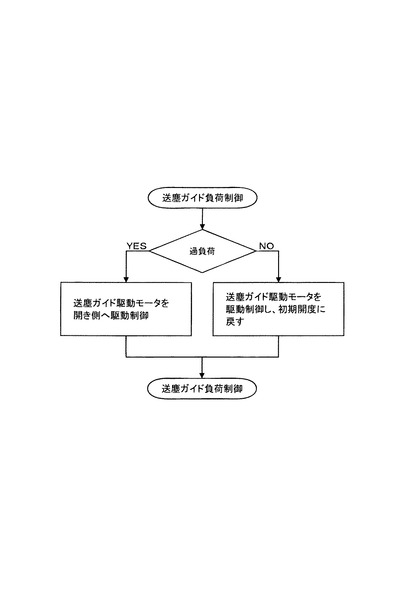
図10は、本実施の形態における送塵ガイドの負荷制御のフローチャートを示しており、前述した車速センサ53に基づく自動制御に付加して、又は、車速センサ53の代わりに、本負荷制御による自動制御が用いられる。
【0035】
すなわち、上記制御部50は、ポテンショメータ48によって送塵ガイド29が初期開度位置から所定値(所定角度)以上退避回動した状態を所定時間継続した場合に過負荷と判定する。該所定値及び所定時間は例えば、10度、15度、又は20度・・・や、1秒、2秒、又は3秒・・・、と任意に設定する。なお、単位時間当たりに所定値以上退避回動した回数で過負荷と判定しても良い。
【0036】
上述のように過負荷と判定された場合(図10のYES)、制御部50は上記モータ46を開き側へ駆動制御して、上記送塵ガイド29が開き側へ開度調節される。また、過負荷ではないと判定された場合には(図10のNO)、制御部50はモータを閉じ側へ駆動制御し、扱胴回転と平行な位置に送塵ガイド29を戻す。なお、該送塵ガイド29を開く場合に、いきなり最大開度に設定したり、1段階又は2段階と段階的に開度を大きくしてもよい。送塵ガイド29を閉じ側へ戻す場合も、扱胴回転と平行な位置ではなく初期開度位置に戻してもよく、いきなり扱胴回転と平行な位置に戻すのではなく、段階的に開度を小さくしてもよい。
【0037】
また、前記ポテンションメータ48により送塵ガイド29が所定退避角度以上になる過負荷状態が所定時間内に何度生ずるか、すなわち送塵ガイド29が過負荷状態となる頻度を演算する。該頻度が所定値以上であると判断した場合、前記アクチュエータ46を操作して第2の調節手段(41)を開き側となるように制御する。これにより、送塵ガイド29による穀粒搬送の過負荷が防止される。該過負荷防止制御は、自動制御及び手動制御の両方で適用可能である。例えば、車速による自動制御にあっては、上記送塵ガイド29の回動頻度で過負荷を検出した場合、車速に対する送塵ガイドの開度を開き側に変更設定される。また、手動制御にあっては、上記過負荷を検出した場合、手動ダイヤル52に対する送塵ガイド29の開度を開き側に変更設定される。
【0038】
ついで、図11に沿って、外の実施の形態について説明するが、上記実施の形態と重複する部分については、図示を省略、又は図に同一符号を付して説明を省略する。
【0039】
送塵ガイド装置17は、同一構成からなる作動部331〜334を有し、該作動部331〜334が扱胴軸方向に並設されている。作動部331は、図11上に鎖線で表される送塵ガイド29を一体に支持している回動支軸34が、支持プレート54と、ベアリング55と、アームプレート37と、を順に貫通し、該アームプレート37は上記回転支軸34と一体となって固定されている。各アームプレート37は、スプリング39を介して、第2の調節手段を構成する連結プレート56で連結され、該連結プレート56と連結されるセクタギヤ44及び支持リンク57と共に平行リンクを構成して同じ運動をする。なお、各作動部331〜334は、同じ構成であるため、作動部331のみを説明し、他の作動部332〜334の説明は省略する。
【0040】
上記アームプレート37と連結プレート56には第1の調節手段を構成する引張スプリング39を引っ掛けるピン38,57がそれぞれ植設され、スプリング39により送塵ガイド29を閉じ方向に付勢する。連結プレート56には下限ストッパ58が配設され、閉じ方向に付勢された上記アームプレート37が上記下限ストッパ58と接当して閉じ方向に回動が規制されることで、送塵ガイド29の初期開度位置が保持される。また、該送塵ガイド29の最大開度は、脱穀カバー13に支持される上限ストッパ59によって規制されている。
【0041】
上記連結プレート56は、モータ46の駆動を伝動する上記セクタギヤ44を介して、該モータ46の正逆駆動によって前後(図11では左右)に移動する。
【0042】
本実施の形態は、以上のような構成からなるので、該モータ46の正逆駆動によって連結プレート56と一体の下限ストッパ58が前後に移動することで閉じ方向に付勢されたアームプレート37が回動し、該アームプレート37と回動支軸34で一体となって回動する送塵ガイド29の初期開度が調節される(第2の調節手段)。そして、該初期開度を基準として、図8の矢印B方向の処理物からの負荷とスプリング39の付勢力との平衡により送塵ガイド29が自律的に退避回動する(第1の調節手段)。
【符号の説明】
【0043】
7 脱穀装置
9 扱室
17 送塵ガイド装置
29 送塵ガイド
37 アームプレート
39 第1の調節手段(スプリング)
41,56 第2の調節手段(係止部材,連結プレート)
44 セクタギヤ
46 アクチュエータ(モータ)
48 ポテンショメータ(センサ)
50 制御部
【技術分野】
【0001】
本発明は、コンバイン,ハーベスタ等に用いられる脱穀装置に係り、詳しくは扱室内面側に設けられ、扱室内に流動する処理物をガイドして処理物の移送速度を調節する送塵ガイドに関する。
【背景技術】
【0002】
従来、扱室の内面側に、扱室内を流動する処理物に接触して処理物の移送速度を調節する送塵ガイドを配設した脱穀装置が知られている。該送塵ガイドは、回動支軸に回動自在に支持され、前記送塵ガイドは、開度を調節されて、扱室内の処理物の移送速度を調節し得る(特許文献1,2参照)。
【0003】
特許文献1記載のものは、前記送塵ガイドにスプリングを接続して、該送塵ガイドが、扱胴の回転に伴いスパイラル状に移送される処理物に接触し、該処理物からの押圧力(負荷)と上記スプリングによる付勢力が平衡するようにその向き(開度)が調節され、処理物からの負荷に応じてその移送速度を自動的に調節する。
【0004】
特許文献2記載のものは、穀粒タンクへ穀粒を送出する投口に設けられた投口センサで回収された穀粒量から閾値を設定し、排塵口及び排気通路に設けられた排出量検出センサで検出された穀粒量が設定された閾値以上である場合に、送塵ガイドをモータにより開度調節されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−222124号公報
【特許文献2】特開2010−187641号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
送塵ガイドの回動制御をスプリングによって行う特許文献1記載のものは、送塵ガイドの初期開度を設定する操作具が脱穀部の上部にあり、操作性が悪く操作が面倒であった。特に、大型のコンバインであると、作業者が上記操作具に手が直接届き難く、送塵ガイドの開度が適切に設定されていない虞があり、かつ運転中には送塵ガイドの初期位置の変更は困難であった。
【0007】
また、特許文献2のものは、投口センサで検出した穀粒量に従ってモータ駆動により送塵ガイドを自動制御するので、操作性や送塵ガイドの最適な開度を設定するのには優れていても、例えば、穀稈が塊となって扱室に流入するなどして急に脱穀負荷が増大した時には対応が遅く、即時的な脱穀負荷対応が不可能であった。
【0008】
そこで、本発明は、送塵ガイドの初期開度の設定を簡便にし、更に、急に脱穀負荷が増大してもその脱穀負荷に応じて即時に開度調節できるように送塵ガイドの回動制御を行って、もって上述した課題を解決した脱穀装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、扱室(9)内に、送塵ガイド(29)を配置した脱穀装置(7)において、
前記扱室(9)内の処理物から受ける負荷に対応して前記送塵ガイド(29)の角度を調節する第1の調節手段(39)と、
前記第1の調節手段(39)による初期開度位置をアクチュエータ(46)により設定する第2の調節手段(41,56)と、を備えてなる。
【0010】
前記第1の調節手段(39)は、前記処理物から受ける負荷に対応した付勢力を前記送塵ガイド(29)に作用するスプリング(39)である。
【0011】
前記第1の調節手段(39)による前記送塵ガイド(29)の角度を検出するセンサ(48)と、該センサ(48)の検出結果に基づき脱穀負荷が過負荷状態かを判定する判定手段(50)と、該判定手段が過負荷と判断した場合、前記第2の調節手段(41,56)を、前記送塵ガイド(29)が開き側となるように制御する制御部(50)と、を備えてなる。
【0012】
なお、上記カッコ内の符号は、図面と対照するためのものであるが、これにより特許請求の範囲の記載に何等影響を及ぼすものではない。
【発明の効果】
【0013】
請求項1に係る本発明によると、送塵ガイドは、処理物から受ける負荷に対応して前記送塵ガイドの角度を調節する第1の調節手段と、第1の調節手段による初期開度位置をアクチュエータにより設定する第2の調節手段と、を備えたので、第1の調節手段により、扱室内に流入してくる処理物から受ける負荷に応じて送塵ガイドの開度が自動調節され、かつ第2の調節手段をアクチュエータにより操作して、上記送塵ガイドの初期開度を容易に調節することができる。
【0014】
請求項2に係る本発明によると、第1の調節手段は、処理物から受ける負荷に対応した付勢力を送塵ガイドに作用するスプリングであるので、比較的簡易な構造で、送塵ガイドは処理物からの負荷に応じて退避回動し、適切に脱穀負荷を調節できる。
【0015】
請求項3に係る本発明によると、送塵ガイドの角度を検出するセンサの検出結果に基づき、送塵ガイドに作用する脱穀負荷が過負荷状態だと判定された場合、前記第2の調節手段を、前記送塵ガイドが開き側となるように制御するので、煩わしい操作をしなくても自動的に送塵ガイドに作用する負荷を軽減し、脱穀負荷を少なくして、所要動力を低減し、省エネ効果を向上することができる。
【図面の簡単な説明】
【0016】
【図1】本発明を適用した脱穀装置を搭載したコンバインを示す平面図。
【図2】その脱穀装置部分を示す平面図。
【図3】その脱穀装置の扱室部分を示す断面図。
【図4】その送塵ガイド装置を示す平面図。
【図5】その正面図。
【図6】その側面図。
【図7】その斜視図。
【図8】その断面図。
【図9】その制御を示すブロック図。
【図10】そのフローチャート。
【図11】外の実施の形態による送塵ガイド装置を示す平面図。
【発明を実施するための形態】
【0017】
以下、図面に沿って、本発明の実施の形態について説明する。コンバイン1は、図1に示すように、クローラにより支持される走行機体2を有しており、該走行機体2の前方には前処理部3が昇降自在に配置されている。走行機体2は、その一側に運転操作部4及びエンジンが配置され、その後方にグレンタンク5及び該グレンタンク内の穀粒を排出する排出オーガ6が配置されており、他側に脱穀装置7が配置されている。
【0018】
脱穀装置7は、図2及び図3に示すように、上部に扱胴8を内蔵した扱室9を有しており、該扱室9は、受網10により選別部と区画されている。扱室9の外側にはフィードチェーン11が配設されており、挟持レール12との間に穀稈を挟持して搬送し得る。扱室9の上方は、脱穀カバー13で覆われており、該脱穀カバー13は、機体内側の枢支軸14に回動自在に支持され、扱胴8と共に扱室9の上方を開放し得る。上記脱穀カバー13の外側は、前記挟持レール12がスプリング15に付勢されて配置されていると共に、レールカバー16が配置されている。
【0019】
前記脱穀カバー13の上部外側角部は、本発明に係る前後の送塵ガイド装置17,17を収納するための凹部18が形成されており、該凹部18の上方はカバー体19が固定ボルト20及びノブ21により取外し自在に取付けられている。前記カバー体19は、ヒンジ構造となっており、ノブ21を外すことにより外側を開放し得る。
【0020】
扱室9は、図2に示すように、その前側に扱室入口版22が設けられており、扱室前側板23と扱室後側版24にて扱胴8が支持されている。脱穀カバー13の扱室9内側には、第1固定ガイド25、第2固定ガイド26、第3固定ガイド27及び第4固定ガイド28が設けられており、また上記凹部18には、扱胴軸方向に2個の送塵ガイド装置17,17が並設されている。扱胴8は、多数の扱歯8aを有しており、図3の矢印A方向に回転して、上記扱歯8aにより穀稈から脱穀された穀粒及び藁屑等からなる処理物が、扱室9内にて上記扱胴8に連れ回されつつ前方から後方に向けてスパイラル状に移送される。該処理物の移送に際して、前記第1〜4固定ガイド25〜28並びに送塵ガイド装置17,17の送塵ガイド29,29が上記処理物の流れを制御する。なお、本発明の実施の形態例では同じ構造からなる2個の送塵ガイド装置17,17が配設されているが、1つでも複数であってもよく、該送塵ガイド装置17,17は同じ構造からなるため、一方のみを説明して他方の説明を省略する。
【0021】
ついで、本発明の要部である上記送塵ガイド装置17,17について、図4ないし図8に沿って説明する。該送塵ガイド装置17は、上プレート30を下プレート31にボルト32で固定してその内部に空間Sを形成し、該空間Sに作動部33が配置されている。また、上記下プレート31の底部は、上記凹部18の底面である脱穀カバー13にボルトにより固定される。
【0022】
送塵ガイド29は、平板状のプレートからなり、その長手方向の一方(扱胴の回転方向上流側)に偏倚した位置に回動支軸34が固定されており、該回動支軸34は、下プレート31に上下に配置されたベアリング35,35を貫通して延びており、扱室9内において上記送塵ガイド29が回動調節自在に固定されている。上記回動支軸34には、上記ベアリング35,35の上部にボス36が回転不能に嵌合されており、該ボス36にはアームプレート37が一体に固定されて、該アームプレート37の先端にピン38が植設されている。上記ボス36にはねじりコイルスプリング39のコイル部39aが嵌挿されて、上記回動支軸34に螺着されたボルト40及びワッシャによりボス36及びスプリング39が抜止めされている。
【0023】
上記スプリング39の一端アーム部39bは、上記ピン38に引っ掛けられて係止されており、他端アーム部39cは、開度設定用の係止部材41に係止されている。
【0024】
前記下プレート31には、ベアリング42を介してそのインナレースからなるボス部43が回転自在に支持されており、該ボス部43の内部に上記ベアリング35,35を介して回転支軸34が支持されている。上記ボス部43にはセクタギヤ44が一体に固定され、該セクタギヤ44は、その上部に上記スプリング39のアーム部39cを固定するための溝を有するL字状の前記係止部材41が一体に固定されると共に、上記下プレート31にボルト及びカラー45を介して支持されるモータ(アクチュエータ)46の出力軸に備えたモータ出力ギヤ47(ピニオン)と噛合し、モータ46の正逆駆動により前記セクタギヤ44を所定回動位置に調節しうる。
【0025】
従って、前記係止部材41が、第1の調節手段を構成するスプリング39を介して、上記送塵ガイドの初期開度位置を設定する第2の調節手段を構成し、該第2の調節手段(41)は、前記モータ46からなるアクチュエータにより調節され、かつ該アクチュエータ46は、例えば運転操作部4に配置されたスイッチ又はセンサによる自動制御により制御される。なお、アクチュエータ46は、電気モータに限らず、油圧モータ、伝動リニアアクチュエータ、油圧リニアアクチュエータ等の他のアクチュエータでもよく、上記センサは、本実施の形態例においては車速センサを用いているが、車速センサに限らず、搬送穀稈量や扱胴回転数など、要は脱穀負荷がどのくらいかということを検出できるセンサなら何でもよい。
【0026】
前記上プレート30の上部にはポテンショメータ48が配設され、該ポテンショメータ48は該上プレート30の下側(上記空間S側)に突出する検出軸48aを有しており、該検出軸48a及び送塵ガイドの回動支点(回動支軸34)と回動支点が一致するようにポテンショアーム49が一体に固定されている。該ポテンショアーム49が、上記送塵ガイド29と一体となって回動する上記ピン38と接当することで、送塵ガイド29の回動角が検知可能となっている。
【0027】
図9は、本実施の形態における制御ブロック図を示しており、コンバイン1は、マイコン(CPU,ROM,RAM等を含む)からなり該制御ブロック図を構成する制御部50を備えている。該制御部50には、上記送塵ガイド29の開度設定を車速に応じて自動で行うか否かの送塵ガイド自動制御スイッチ51、該スイッチ51がオフの時に手動で前記送塵ガイド29の開度を変更可能な送塵ガイド手動ダイヤル52、車速を検出する車速センサ53、及び上記送塵ガイド29の退避角度を検出する上記ポテンショメータ48からの信号が入力され、上記スイッチ51及びダイヤル52は、上記運転操作部4に配置される。これらの信号を受けて、上記制御部50はモータ46を駆動制御して、上記送塵ガイド29の開度を設定する。
【0028】
本実施の形態は、以上のような構成からなるので、コンバイン1の作業に基づき、刈取られた穀稈は挟持レール12に挟まれた状態でフィードチェーン11により前側から後側に搬送され、扱室9内に運ばれる。脱穀装置7の扱胴8が矢印A方向に回転している状態では、運ばれた穀稈は、その穂先部が扱胴8で脱穀処理され、脱穀された穀粒やワラ屑は扱胴8に連れ回されて回転しつつスパイラル状に前方から後方に移送されて脱粒処理される。脱穀された穀粒、ワラ屑等の処理物は、各固定ガイド25〜28及び送塵ガイド29,29に案内されつつ、前側から後側に移送され、これら処理物の移送速度は送塵ガイド29,29の開度によって調節される。
【0029】
自動制御スイッチ51をオンにした自動制御の場合には、車速センサ53が車速を検出し、その信号を受け取った制御部50がその車速に応じてモータ46の正逆駆動を制御する。即ち、車速が遅い場合には扱室9に流入する処理物の量が少ないので、送塵ガイド29を比較的閉じ側へ、車速が早い場合には扱室9に流入する処理物の量が多いので、比較的開き側に、例えば9段階に送塵ガイド29の初期開度調節を自動的に行う。
【0030】
上記自動制御スイッチ51をオフにした場合には、上記自動制御が切られて手動制御状態となる。該手動制御にあっては、上記運転操作部4に配置された送塵ガイド手動ダイヤル52を操作することによって、その信号を受け取った制御部50がモータ46の正逆駆動を制御し、作業中でも容易に送塵ガイド29の初期開度を調節することができる。
【0031】
上記自動制御又は手動制御にあって、上記制御部50からの信号が上記駆動モータ46に出力されて、該モータ46を正転又は逆転する。該モータ46の正逆回転により上記セクタギヤ44と一体の上記係止部材41が回動し、上記スプリング39を介して上記送塵ガイド29と一体に回動するピン38が回動して、その回動角を上記ポテンショメータ48が検出し、制御部50が送塵ガイド29の初期開度位置を調節制御する(第2の調節手段)。
【0032】
送塵ガイド29が開き側にあると、処理物の前から後への移送速度が速くなり、送塵ガイド29が閉じ側にあると、処理物の移送速度が遅くなり、その分扱室9内に溜まる処理物の時間(脱穀時間)が長くなる。扱胴8の回転に伴う前記処理物のスパイラル状の移送により、送塵ガイド29には処理物からの押圧力(負荷)が作用し、扱室9内の処理物が多いと上記負荷も増大する。そして上記送塵ガイド29は、上記第2の調節手段による初期開度位置を基準に処理物からの負荷とスプリング39の付勢力が平衡する位置に自律的に回動して、扱室9内の処理物の量及び濡れ材等による処理物の状況に基づく処理物からの負荷に応じて、その退避角度を調節する(第1の調節手段)。
【0033】
なお、モータ駆動を伝動するセクタギヤ44が上プレート30と接当することでその回動範囲が規制され、送塵ガイド29の初期開度の上限及び下限が規制される。また、ポテンショアーム49も同様にして上プレート30と接当することで、上記送塵ガイド29の最大退避角度が規制される。
【0034】
図10は、本実施の形態における送塵ガイドの負荷制御のフローチャートを示しており、前述した車速センサ53に基づく自動制御に付加して、又は、車速センサ53の代わりに、本負荷制御による自動制御が用いられる。
【0035】
すなわち、上記制御部50は、ポテンショメータ48によって送塵ガイド29が初期開度位置から所定値(所定角度)以上退避回動した状態を所定時間継続した場合に過負荷と判定する。該所定値及び所定時間は例えば、10度、15度、又は20度・・・や、1秒、2秒、又は3秒・・・、と任意に設定する。なお、単位時間当たりに所定値以上退避回動した回数で過負荷と判定しても良い。
【0036】
上述のように過負荷と判定された場合(図10のYES)、制御部50は上記モータ46を開き側へ駆動制御して、上記送塵ガイド29が開き側へ開度調節される。また、過負荷ではないと判定された場合には(図10のNO)、制御部50はモータを閉じ側へ駆動制御し、扱胴回転と平行な位置に送塵ガイド29を戻す。なお、該送塵ガイド29を開く場合に、いきなり最大開度に設定したり、1段階又は2段階と段階的に開度を大きくしてもよい。送塵ガイド29を閉じ側へ戻す場合も、扱胴回転と平行な位置ではなく初期開度位置に戻してもよく、いきなり扱胴回転と平行な位置に戻すのではなく、段階的に開度を小さくしてもよい。
【0037】
また、前記ポテンションメータ48により送塵ガイド29が所定退避角度以上になる過負荷状態が所定時間内に何度生ずるか、すなわち送塵ガイド29が過負荷状態となる頻度を演算する。該頻度が所定値以上であると判断した場合、前記アクチュエータ46を操作して第2の調節手段(41)を開き側となるように制御する。これにより、送塵ガイド29による穀粒搬送の過負荷が防止される。該過負荷防止制御は、自動制御及び手動制御の両方で適用可能である。例えば、車速による自動制御にあっては、上記送塵ガイド29の回動頻度で過負荷を検出した場合、車速に対する送塵ガイドの開度を開き側に変更設定される。また、手動制御にあっては、上記過負荷を検出した場合、手動ダイヤル52に対する送塵ガイド29の開度を開き側に変更設定される。
【0038】
ついで、図11に沿って、外の実施の形態について説明するが、上記実施の形態と重複する部分については、図示を省略、又は図に同一符号を付して説明を省略する。
【0039】
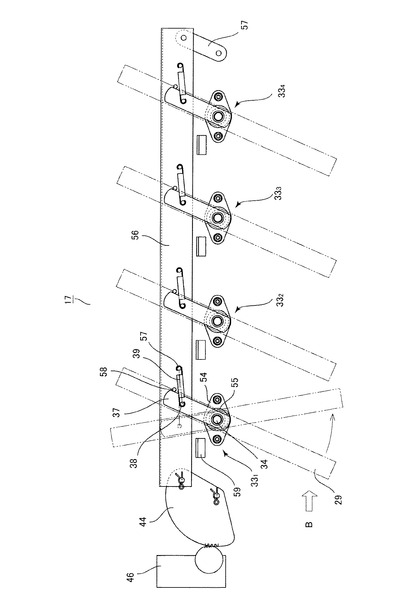
送塵ガイド装置17は、同一構成からなる作動部331〜334を有し、該作動部331〜334が扱胴軸方向に並設されている。作動部331は、図11上に鎖線で表される送塵ガイド29を一体に支持している回動支軸34が、支持プレート54と、ベアリング55と、アームプレート37と、を順に貫通し、該アームプレート37は上記回転支軸34と一体となって固定されている。各アームプレート37は、スプリング39を介して、第2の調節手段を構成する連結プレート56で連結され、該連結プレート56と連結されるセクタギヤ44及び支持リンク57と共に平行リンクを構成して同じ運動をする。なお、各作動部331〜334は、同じ構成であるため、作動部331のみを説明し、他の作動部332〜334の説明は省略する。
【0040】
上記アームプレート37と連結プレート56には第1の調節手段を構成する引張スプリング39を引っ掛けるピン38,57がそれぞれ植設され、スプリング39により送塵ガイド29を閉じ方向に付勢する。連結プレート56には下限ストッパ58が配設され、閉じ方向に付勢された上記アームプレート37が上記下限ストッパ58と接当して閉じ方向に回動が規制されることで、送塵ガイド29の初期開度位置が保持される。また、該送塵ガイド29の最大開度は、脱穀カバー13に支持される上限ストッパ59によって規制されている。
【0041】
上記連結プレート56は、モータ46の駆動を伝動する上記セクタギヤ44を介して、該モータ46の正逆駆動によって前後(図11では左右)に移動する。
【0042】
本実施の形態は、以上のような構成からなるので、該モータ46の正逆駆動によって連結プレート56と一体の下限ストッパ58が前後に移動することで閉じ方向に付勢されたアームプレート37が回動し、該アームプレート37と回動支軸34で一体となって回動する送塵ガイド29の初期開度が調節される(第2の調節手段)。そして、該初期開度を基準として、図8の矢印B方向の処理物からの負荷とスプリング39の付勢力との平衡により送塵ガイド29が自律的に退避回動する(第1の調節手段)。
【符号の説明】
【0043】
7 脱穀装置
9 扱室
17 送塵ガイド装置
29 送塵ガイド
37 アームプレート
39 第1の調節手段(スプリング)
41,56 第2の調節手段(係止部材,連結プレート)
44 セクタギヤ
46 アクチュエータ(モータ)
48 ポテンショメータ(センサ)
50 制御部
【特許請求の範囲】
【請求項1】
扱室内に、送塵ガイドを配置した脱穀装置において、
前記扱室内の処理物から受ける負荷に対応して前記送塵ガイドの角度を調節する第1の調節手段と、
前記第1の調節手段による初期開度位置をアクチュエータにより設定する第2の調節手段と、を備えてなる、
ことを特徴とする脱穀装置。
【請求項2】
前記第1の調節手段は、前記処理物から受ける負荷に対応した付勢力を前記送塵ガイドに作用するスプリングである、
請求項1記載の脱穀装置。
【請求項3】
前記第1の調節手段による前記送塵ガイドの角度を検出するセンサと、該センサの検出結果に基づき脱穀負荷が過負荷状態かを判定する判定手段と、該判定手段が過負荷と判断した場合、前記第2の調節手段を、前記送塵ガイドが開き側となるように制御する制御部と、を備えてなる、
請求項1又は2記載の脱穀装置。
【請求項1】
扱室内に、送塵ガイドを配置した脱穀装置において、
前記扱室内の処理物から受ける負荷に対応して前記送塵ガイドの角度を調節する第1の調節手段と、
前記第1の調節手段による初期開度位置をアクチュエータにより設定する第2の調節手段と、を備えてなる、
ことを特徴とする脱穀装置。
【請求項2】
前記第1の調節手段は、前記処理物から受ける負荷に対応した付勢力を前記送塵ガイドに作用するスプリングである、
請求項1記載の脱穀装置。
【請求項3】
前記第1の調節手段による前記送塵ガイドの角度を検出するセンサと、該センサの検出結果に基づき脱穀負荷が過負荷状態かを判定する判定手段と、該判定手段が過負荷と判断した場合、前記第2の調節手段を、前記送塵ガイドが開き側となるように制御する制御部と、を備えてなる、
請求項1又は2記載の脱穀装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−200169(P2012−200169A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−65941(P2011−65941)
【出願日】平成23年3月24日(2011.3.24)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月24日(2011.3.24)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]