
自動倉庫設備
【課題】地震の揺れによる損傷を極力抑制できる自動倉庫設備を提供すること。
【解決手段】物品収納棚3が、棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対の間に収納部2が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、スタッカークレーン5の作動を制御する制御手段が、スタッカークレーンを走行作動させている場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理としてベイごとに設定された走行停止位置にスタッカークレーンを停止させるべく、スタッカークレーンの作動を制御するように構成されている。
【解決手段】物品収納棚3が、棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対の間に収納部2が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、スタッカークレーン5の作動を制御する制御手段が、スタッカークレーンを走行作動させている場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理としてベイごとに設定された走行停止位置にスタッカークレーンを停止させるべく、スタッカークレーンの作動を制御するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を収納する収納部が上下方向に複数段に、かつ、横方向に複数列に配置された物品収納棚と、前記物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、前記収納部との間で物品を移載するべく前記スタッカークレーンの作動を制御する制御手段とが設けられ、前記スタッカークレーンが前記収納部との間で物品を移載するための走行停止位置が前記複数列の収納部の各列の夫々について設定され、前記制御手段が、地震による損傷を回避するべく前記スタッカークレーンの作動を制御する地震対策処理を実行するように構成されている自動倉庫設備に関する。
【背景技術】
【0002】
上記自動倉庫設備の従来例として、揺れ予測情報取得手段が揺れ予測情報を取得すると、走行作動中のスタッカークレーンを極力短い制度距離にて即時に停止させるために緊急停止用の減速度で減速させてそのまま停止させるものがある。(例えば、特許文献1の段落「0052」〜「0058」並びに図4及び図5参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−298520号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来例の自動倉庫設備であると、揺れ予測情報取得手段が揺れ予測情報を取得すると、走行作動中のスタッカークレーンを緊急停止用の減速度で減速させてそのまま停止させるため、制動距離によっては、前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成された物品収納棚の支柱対と棚横幅方向で一致する位置にスタッカークレーンが停止する場合があり、このような状態で物品収納棚とスタッカークレーンとが地震により揺れると、物品収納棚とスタッカークレーンとが互いに接触して設備が損傷するおそれがある。特に地震の震源が近い場合は、地震による揺れが大きくなる可能性が高く、物品収納棚とスタッカークレーンとの揺れが大きくなるおそれがあり、設備の損傷の可能性も高くなる。
このように、従来例のものでは、揺れ予測情報取得手段が揺れ予測情報を取得すると、走行作動中のスタッカークレーンを緊急停止用の減速度で減速させて走行作動中のスタッカークレーンを停止させるために、スタッカークレーンの停止位置によっては地震の揺れが到達した際に、物品収納棚とスタッカークレーンとが互いに接触して設備が損傷するおそれがある。
【0005】
本発明は上記実情に鑑みて為されたものであって、その目的は、地震の揺れによる損傷を極力回避できる自動倉庫設備を提供する点にある。
【課題を解決するための手段】
【0006】
この目的を達成するために、本発明に係る自動倉庫設備の第1特徴構成は、物品を収納する収納部が上下方向に複数段に、かつ、横方向に複数列に配置された物品収納棚と、前記物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、前記収納部との間で物品を移載するべく前記スタッカークレーンの作動を制御する制御手段とが設けられ、前記スタッカークレーンが前記収納部との間で物品を移載するための走行停止位置が前記複数列の収納部の各列の夫々について設定され、前記制御手段が、地震による損傷を回避するべく前記スタッカークレーンの作動を制御する地震対策処理を実行するように構成されている自動倉庫設備において、
前記物品収納棚が、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で前記支柱対の間に前記収納部が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、前記制御手段が、前記スタッカークレーンを走行作動させている場合において、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理として前記走行停止位置に前記スタッカークレーンを停止させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0007】
本特徴構成によれば、スタッカークレーンが走行作動している場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、制御手段が地震対策処理を実行することで、スタッカークレーンは走行停止位置、つまり、収納部との間で物品を移載するための位置に走行停止することになる。
物品収納棚は、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成されおり、収納部は、物品収納棚における支柱対の間に位置しているため、収納部との間で物品を移載するための位置である走行停止位置に停止したスタッカークレーンは、物品を移載する物品移載手段乃至その移載装置が搭載された昇降台が、隣接する支柱対の間に位置する状態となる。
昇降台は、スタッカークレーンの他の部分、例えば、走行台車や昇降台を昇降案内する一本又は前後一対の昇降マストに比べて、走行経路の横幅方向に幅広となっており、さらに、移載装置については、例えばスライドフォーク装置で構成される場合のように昇降台より更に走行経路の横幅方向に幅広となっている場合があるため、昇降台やそれに搭載されている移載装置が支柱対の間に位置する状態とすることで、地震による揺れによって、物品収納棚とスタッカークレーンとが大きく揺れても、物品収納棚とスタッカークレーンとが互いに接触して設備が損傷することを極力回避できる。
このように、本願発明によれば、地震の揺れによる損傷を極力回避できる自動倉庫設備を得るに至った。
【0008】
本発明に係る自動倉庫設備の第2特徴構成は、前記制御手段は、前記地震対策処理として、走行作動中の前記スタッカークレーンより走行方向で前方側に位置する前記走行停止位置のうち前記スタッカークレーンを停止させることができる前記走行停止位置を設定制動条件に基づいて判別し、停止可能と判別した前記走行停止位置のうち走行方向で最も近い前記走行停止位置を選択して、前記スタッカークレーンを当該選択した走行停止位置に停止させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0009】
本特徴構成によれば、スタッカークレーンが走行作動している状態で揺れ予測情報取得手段が揺れ予測情報を取得したときのスタッカークレーンの走行速度と、例えば、地震対策処理でスタッカークレーンを停止させる場合の減速度等の設定制動条件とによって、スタッカークレーンの制動距離が予測できることから、制御手段は、予測情報取得手段が揺れ予測情報を取得したときのスタッカークレーンの走行位置から予測される制動距離だけ走行方向で前方側の位置からさらに前方側に位置する走行停止位置を、スタッカークレーンを停止させることができる走行停止位置として他の走行停止位置と区別できる。
そして、スタッカークレーンを停止させることができる走行停止位置のうち、走行方向で最も近い走行停止位置を選択して、スタッカークレーンを当該選択した走行停止位置に停止させるので、揺れ予測情報取得手段が揺れ予測情報を取得してから極力短時間でスタッカークレーンを走行停止位置に停止させることができ、一層高い確率で地震の揺れによる損傷を極力回避できる。
【0010】
本発明に係る自動倉庫設備の第3特徴構成は、前記制御手段は、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンの昇降台が前記収納棚から落下する物品により損傷することを抑制できる損傷抑制昇降位置に前記昇降台を位置させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0011】
本特徴構成によれば、揺れ予測情報取得手段が揺れ予測情報を取得すると、昇降台は損傷抑制昇降位置に位置することになる。損傷抑制昇降位置はスタッカークレーンの昇降台が収納棚から落下する物品により損傷することを抑制できる位置であるため、地震の揺れによって収納棚から落下する物品により昇降台が損傷することを極力回避できる。傷抑制昇降位置としては、例えば、昇降台に対して物品が落下してこない位置、又は、物品が落下してきても昇降台の損傷を抑制できる位置である。
【0012】
本発明に係る自動倉庫設備の第4特徴構成は、前記損傷抑制昇降位置が、前記複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置である点にある。
【0013】
本特徴構成によれば、揺れ予測情報取得手段が揺れ予測情報を取得すると、昇降台は複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置に位置することになる。最上段の収納部より上方には物品が存在することはないため、昇降台が最上段昇降位置に位置している限り、地震の揺れによって収納棚から物品が昇降台に落下するとしてもその物品は最上段の収納部に収納されている物品であるから、落下速度が小さい状態で昇降台に衝突するに過ぎず、落下距離が長いために落下速度が大きい状態の物品が昇降台に衝突することを極力回避できる。このように、地震の揺れによって収納棚から落下する物品により昇降台が損傷することを一層高い確率で極力回避できる。
【0014】
本発明に係る自動倉庫設備の第5特徴構成は、前記制御手段は、前記収納部の夫々について物品が収納されているか否かを管理するように構成され、かつ、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンが停止する前記走行停止位置に対応する列の前記収納部のうち物品が収納されている前記収納部で最も上段に位置する前記収納部よりも上方側の位置を前記損傷抑制昇降位置として設定するように構成されている点にある。
【0015】
本特徴構成によれば、制御手段は、収納部の夫々について物品が収納されているか否かを管理しているので、走行停止位置に対応する列の収納部の夫々に物品が収納されているか否かを認識することができる。そのため、制御手段は、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理を実行して、スタッカークレーンが停止する走行停止位置を決定するとともに、その走行停止位置に対応する列の収納部のうち物品が収納されている収納部で最も上段に位置する収納部を判別することができる。そして、制御手段は、該当する収納部よりも上方側の位置に昇降台を位置させることになる。つまり、昇降台は、スタッカークレーンが停止する走行停止位置に対応する列の収納部のうち物品が収納されている収納部で最も上段に位置する収納部よりも上方側の位置に位置することになる。
したがって、揺れ予測情報取得手段が揺れ予測情報を取得した後、昇降台を昇降方向で昇降させるに当って、極力低い位置に位置させることで、地震の揺れによって収納棚から落下する物品により昇降台が損傷することを回避でき、しかも、地震による揺れが到来するときのスタッカークレーンの重心を低重心化して極力安定した状態で地震による揺れを受けるようにして、設備の損傷を極力回避することができる。また、例えば、昇降台を上昇させて退避させる場合には、必要以上に高い位置まで上昇させることがないので、昇降台の昇降距離が極力短くなり、地震による揺れが到来するときには昇降台が停止した状態である可能性が高くなり、昇降台が昇降作動中に地震による揺れが到来して設備の損傷が拡大する不都合を極力防止できる。
【0016】
本発明に係る自動倉庫設備の第6特徴構成は、前記制御手段が、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理の実行開始に伴って、前記昇降台を前記損傷抑制昇降位置に位置させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0017】
本特徴構成によれば、揺れ予測情報取得手段が揺れ予測情報を取得すると、制御手段は、地震対策処理の実行開始に伴って、昇降台を損傷抑制昇降位置に位置させるべく、スタッカークレーンの作動を制御するので、スタッカークレーンが走行作動している状態で揺れ予測情報取得手段が揺れ予測情報を取得すると、スタッカークレーンは、走行停止位置に走行停止するようにその走行作動が制御され、同時に、昇降台が損傷抑制昇降位置に位置するように昇降作動が制御される。これにより、揺れ予測情報取得手段が揺れ予測情報を取得した後、スタッカークレーンが走行停止するまでに要する時間と昇降台が昇降停止するまでに要する時間のうち長い方の時間が経過した時点で、スタッカークレーンは走行停止状態であり、かつ昇降停止状態となる。
したがって、例えば、スタッカークレーンが走行停止した後に昇降台を損傷抑制昇降位置まで昇降させる場合に比べて、短時間でスタッカークレーンの走行作動及び昇降作動の双方を停止させた状態とすることができる。これにより、スタッカークレーンの走行作動中又は昇降作動中に地震による揺れが到来して設備の損傷が拡大する不都合を極力防止できる。
【図面の簡単な説明】
【0018】
【図1】自動倉庫設備の全体斜視図
【図2】物品収納棚の一部拡大斜視図
【図3】スタッカークレーンの走行停止位置と収納部の列との対応関係を示す平面図
【図4】スタッカークレーンの走行停止位置と収納部の列との対応関係を示す側面図
【図5】制御ブロック図
【図6】地震対策制御のフローチャート
【図7】地震対策用走行制御のフローチャート
【図8】地震対策用昇降制御のフローチャート
【発明を実施するための形態】
【0019】
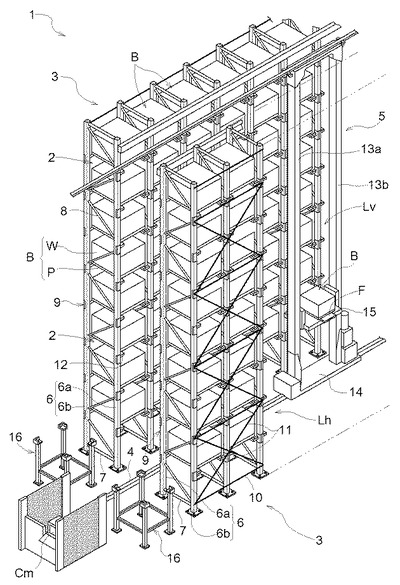
本発明に係る自動倉庫設備の実施形態を図面に基づいて説明する。自動倉庫設備1は、図1に示すように、物品Bを収納自在な収納部2を上下方向及び左右方向に並ぶ状態で配置して構成された物品収納棚3を一対備えている。一対の物品収納棚3は、夫々の収納部2の間口が相対向する状態で間隔を隔てて床面に設置されており、これらの一対の物品収納棚3の間において床面に敷設された軌道4に案内されて、軌道4に沿って一対の物品収納棚3の間に形成される走行経路Lhに沿って走行自在なスタッカークレーン5が一台設けられている。
【0020】
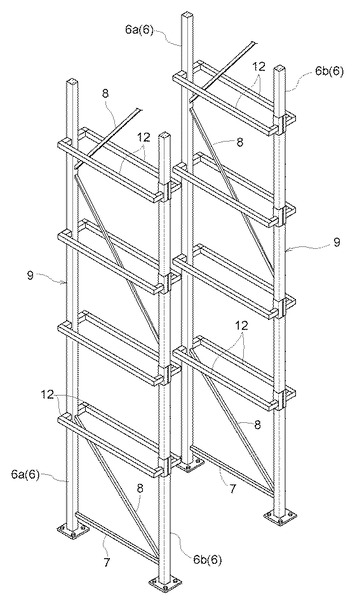
物品収納棚3は、棚前面側に位置する前側支柱6aと棚背面側に位置する後側支柱6bとからなる支柱対6を側面水平材7や側面ブレース材8により接続して構成された支柱枠9を棚横幅方向に等間隔にて複数個配置して、棚の背面側において各支柱枠9同士を背面水平ビーム材10及び背面垂直ブレース材11にて接続して構成されている。
【0021】
支柱枠9には、棚左右方向に水平面に沿って突出する腕木材12が上下方向に等間隔にて複数段(本実施形態では8段)の高さにおいて取り付けられており、隣接する支柱枠9の夫々に備えられた互いに対向する向きの一対の腕木材12・12にて物品Bの底面部(パレットP及びそのパレットPに載置される荷Wで構成される物品BにおけるパレットPの底面部)における左右両側部を支持することで、物品Bを載置支持自在となっている。
【0022】
このように、物品収納棚3は、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対6の間に収納部2が位置するように構成されている。
【0023】
スタッカークレーン5は、走行方向で前後一対の昇降案内マスト13a・13bが立設された走行台車14と、前後一対の昇降案内マスト13a・13bの間に形成される昇降経路Lvに沿って昇降自在な昇降台15と、昇降台15に一体昇降自在に装備されて、昇降台15側に引退させた引退位置と走行経路Lhの横幅方向で収納部2や荷受台16に突出させた突出位置との間で物品移載方向(走行経路Lhの横幅方向に同じ。)に出退自在なスライドフォーク装置Fとを備えて構成されている。
【0024】
スタッカークレーン5の走行作動、昇降台15の昇降作動、スライドフォーク装置Fの出退作動によって、物品収納棚3の各収納部2と、作業者がフォークリフト等で物品Bを搬出入する荷受台16との間で、各種の荷WをパレットP上に載せた状態の物品Bを搬送できるように構成されている。
【0025】
図1、図3及び図4に示すように、走行経路Lhの荷受台16が設けられている側の端部(以下HP側端部という。)の付近には、スタッカークレーン5に備えられたクレーンコントローラCsと赤外線光通信により各種の制御指令を通信自在な地上側コントローラCmが設置されている。地上側コントローラCmは、上位の管理コンピュータから出庫指令や入庫指令が指令されるその指令に従った入庫作業や出庫作業を処理するべく、スタッカークレーン5の作動を制御する。
【0026】
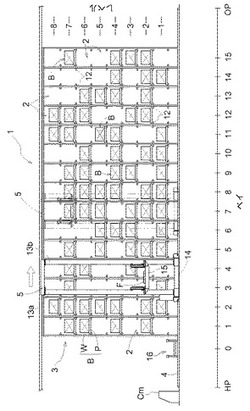
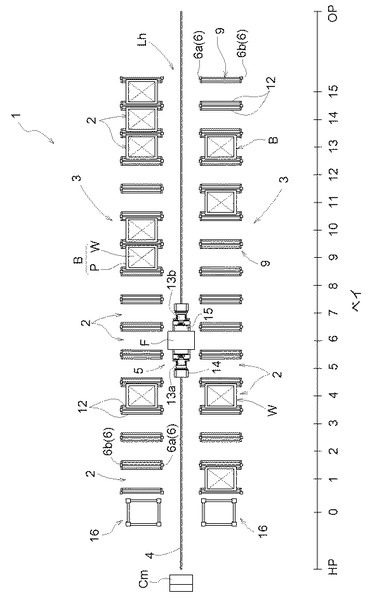
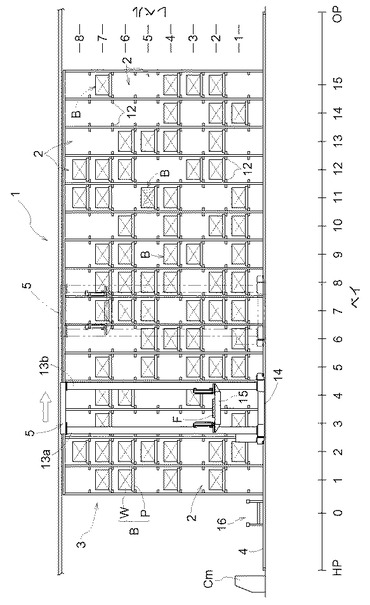
スタッカークレーン5が収納部2との間で物品Bを移載するための走行停止位置が複数列の収納部2の各列の夫々について設定されている。本実施形態では、図3及び図4に示すように、荷受台16についての走行停止位置「ベイ0」と各列についての走行停止位置「ベイ1」〜「ベイ15」との、合わせて16個の走行停止位置が設定されている。同様に、スタッカークレーン5が収納部2との間で物品Bを移載するための昇降停止位置が複数段の収納部2の各段の夫々について設定されている。本実施形態では、図4に示すように、各段についての昇降停止位置「レベル1」〜「レベル8」の8個の昇降停止位置が設定されている。
【0027】
ちなみに、荷受台16が物品Bを載置支持する高さは、物品収納棚3についての最下段の収納部2が物品Bを載置支持する高さに一致しているため、荷受台についての昇降停止位置は「レベル1」である。また、一対の物品収納棚3のうち、HPからOPに向かう方向視で走行経路Lhの左側の棚を「バンクL」の棚とし、右側の棚を「バンクR」の棚としている。
【0028】
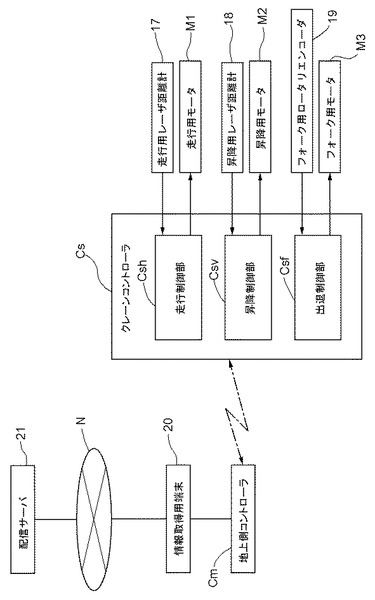
スタッカークレーン5の作動を制御する制御手段の構成について図5に示す制御ブロック図に基づいて説明する。本実施形態では、制御手段Hは、地上側コントローラCm及びクレーンコントローラCsにて構成されている。
【0029】
クレーンコントローラCsの走行制御部Cshは、スタッカークレーン5の走行経路Lhにおける走行位置を検出する走行位置検出手段としての走行用レーザ距離計17の検出情報に基づいて、走行台車14を走行駆動する走行用モータM1の作動をフィードバック制御する。走行制御部Cshは、地上側コントローラCmから目標走行停止位置が指令されると、走行開始位置から目標走行停止位置まで、設定加速度にて加速し、設定定常速度にて走行して、設定減速度にて減速する形態で走行するための走行速度パターンを生成し、走行速度パターンにて与えられる現在の走行位置についての目標走行速度と現在の走行速度との偏差が小さくなるように、設定制御周期毎(例えば10〔mms〕毎)に走行用モータM1の作動をPID制御する。
【0030】
クレーンコントローラCsの昇降制御部Csvは、スタッカークレーン5の昇降経路Lvにおける昇降位置を検出する昇降位置検出手段としての昇降用レーザ距離計18の検出情報に基づいて、昇降台15を昇降駆動する昇降用モータM2の作動をフィードバック制御する。昇降制御部Csvは、地上側コントローラCmから目標昇降停止位置が指令されると、昇降開始位置から目標昇降停止位置まで、設定加速度にて加速し、設定定常速度にて昇降して、設定減速度にて減速する形態で昇降するための昇降速度パターンを生成し、昇降速度パターンにて与えられる現在の昇降位置についての目標昇降速度と現在の昇降速度との偏差が小さくなるように、設定制御周期毎(例えば10〔mms〕毎)に昇降用モータM2の作動をPID制御する。
【0031】
荷受台16や収納部2の物品移載対象箇所から物品Bを受け取る掬い移載作動は、物品移載対象箇所の物品支持高さ(例えば、収納部2の腕木材12の高さ)よりも下方側空間にスライドフォーク装置Fを突入させ、物品移載対象箇所へ物品Bを受け渡す卸し移載作動は、物品移載対象箇所の物品支持高さよりも上方側空間にスライドフォーク装置Fを突入させる。そのため、同じ移載対象箇所であっても卸し移載作動の場合の方が掬い移載作動の場合よりも、目標昇降停止位置として高い昇降位置が指令される。
【0032】
クレーンコントローラCsの出退制御部Csfは、スライドフォーク装置Fの突出量を検出する突出量検出手段としてのフォーク用ロータリエンコーダ19の検出情報に基づいて、スライドフォーク装置Fを出退駆動するフォーク用モータM3の作動をフィードバック制御する。出退制御部Csfは、地上側コントローラCmから突出開始指令が指令されると、引退位置から突出位置まで、設定加速度にて加速し、設定定常速度にて突出して、設定減速度にて減速する形態で突出するための突出速度パターンにて与えられる現在の突出位置についての目標突出速度と現在の突出速度との偏差が小さくなるように、設定制御周期毎(例えば5〔mms〕毎)にフォーク用モータM3の作動をPID制御する。
【0033】
地上側コントローラCmは、上位コンピュータから指令される入庫指令や出庫指令に基づいて、クレーンコントローラCsに対して、搬送元としての移載対象箇所(入庫作業であれば荷受台16、出庫作業であれば出庫対象の物品Bが収納されている収納部2)についての走行停止位置と昇降停止位置に昇降台15を位置させるために目標走行停止位置及び目標昇降停止位置を指令して走行作動及び昇降作動を完了させた後に、当該搬送元の移載対象箇所において物品Bを掬い作動にて移載するための突出開始指令、掬い移載用上昇指令及び引退開始指令を指令して、搬送元の移載対象箇所から搬送対象の物品Bを受け取った後、搬送先としての移載対象箇所(入庫作業であれば入庫対象の物品Bを収納する空き状態の収納部2、出庫作業であれば荷受台16)についての走行停止位置と昇降停止位置に昇降台15を位置させるための目標走行停止位置及び目標昇降停止位置を指令して走行作動及び昇降作動を完了させた後に、当該搬送先の移載対象箇所において物品Bを卸し作動にて移載するための突出開始指令、卸し移載用下降指令及び引退開始指令を指令して、搬送先の移載対象箇所に搬送対象の物品Bを受け渡させる。クレーンコントローラCsは、地上側コントローラCmからの各指令に基づく作動が完了すると当該完了した作動ごとに完了情報を地上側コントローラCmに送信する。
【0034】
地上側コントローラCmは、入庫作業での入庫先の収納部2に対する卸し移載作動において指令した引退開始指令に基づくスライドフォーク装置Fの引退作動が完了して、そのことを示す完了情報をクレーンコントローラCsから受信すると、入庫対象の物品Bの入庫が完了したとして、記憶部(図示せず。)に記憶されている在庫データベースにおける当該入庫先の収納部2についての物品存否情報を「空状態」から「在荷状態」に更新する。また、地上側コントローラCmは、出庫作業での出庫先の荷受台16に対する卸し移載作動において指令した引退開始指令に基づくスライドフォーク装置Fの引退作動が完了して、そのことを示す完了情報をクレーンコントローラCsから受信すると、出庫対象の物品Bの出庫が完了したとして、前記在庫データベースにおける当該出庫元の収納部2についての物品存否情報を「空状態」から「在荷状態」に更新する。このように、地上側コントローラCmは、収納部2の夫々について物品Bが収納されているか否かを管理している。
【0035】
制御手段Hには、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段としての情報取得用端末20が接続されている。
【0036】
情報取得用端末20は、インターネットNを介して、現在時刻から地震による揺れ(例えば主要動)が発生するまでの予測時間を秒単位で示す予測時間情報や地震による揺れの予測強さを予測震度で示す予測強さ情報などの予測地震情報、及び、その更新情報を配信する配信サーバ21に接続されており、予測時間情報及びその予測時間を更新する更新情報を取得する予測時間取得手段と、予測強さ情報及びその予測強さを更新する更新情報を取得する予測強さ取得手段とを備えている。
【0037】
配信サーバ21は、気象庁のEPOS(地震活動等総合監視システム)(図外)から提供される予測時間情報や予測強さ情報などを含む予測地震情報及びその更新情報が入力されると、その都度、入力された予測地震情報及び更新情報を情報取得用端末20に配信するように構成されている。
【0038】
この自動倉庫設備1の制御手段Hは、地震による損傷を回避するべくスタッカークレーン5の作動を制御する地震対策処理を実行するように構成されている。以下、制御手段Hが実行する地震対策処理について説明する。
【0039】
制御手段Hの走行制御部Cshは、スタッカークレーン5を走行作動させている場合において、情報取得用端末20が揺れ予測情報を取得すると、地震対策処理として走行停止位置にスタッカークレーン5を停止させる。収納部2は、物品収納棚3における支柱枠9の間に位置しているため、収納部2との間で物品Bを移載するための位置である走行停止位置に停止したスタッカークレーンは、物品Bを移載するスライドフォーク装置F乃至スライドフォーク装置Fが搭載された昇降台15が、隣接する支柱枠9の間に位置する状態となる。昇降台15は、スタッカークレーン5の他の部分、例えば、走行台車14や前後一対の昇降案内マスト13a・13bに比べて、走行経路Lhの横幅方向に幅広となっており、さらに、スライドフォーク装置Fについては、昇降台15より更に走行経路Lhの横幅方向に幅広となっている場合があるため、昇降台15やそれに搭載されているスライドフォーク装置Fが支柱枠9の間に位置する状態とすることで、地震による揺れによって、物品収納棚3とスタッカークレーン5とが大きく揺れても、物品収納棚3とスタッカークレーン5とが互いに接触して自動倉庫設備1が損傷することを極力回避できる。
【0040】
なお、地震対策処理によりスタッカークレーン5が荷受台16についての走行停止位置に停止する場合もあるが、以下では、物品収納棚3とスタッカークレーン5との相互の接触による損傷を回避することを説明するため、スタッカークレーン5が、物品収納棚3の収納部2についての走行停止位置に停止する場合に注目して説明する。
【0041】
走行制御部Cshは、地震対策処理として、走行作動中のスタッカークレーン5より走行方向で前方側に位置する走行停止位置のうちスタッカークレーン5を停止させることができる走行停止位置を設定制動条件に基づいて判別し、停止可能と判別した走行停止位置のうち走行方向で最も近い走行停止位置を選択して、スタッカークレーン5を当該選択した走行停止位置に停止させる。本実施形態では、設定制動条件として、入庫作業や出庫作業における走行速度パターンに基づく減速状態での減速度よりも大きな減速度にて走行停止するまで減速することを条件としている。
【0042】
説明を加えると、走行制御部Cshは、スタッカークレーン5が走行作動している状態で情報取得用端末20が揺れ予測情報を取得したときのスタッカークレーン5の走行速度と、上記設定制動条件とによって、スタッカークレーンを設定制動条件で停止させた場合の制動距離を予測する。ちなみに、走行制御部Cshは、走行用レーザ距離計17の検出情報の時間変化率からスタッカークレーン5の現在の走行速度を算出するが、この走行速度は、上述した走行作動のPID制御のために算出するので、これを流用できる。こうして、情報取得用端末20が揺れ予測情報を取得したときのスタッカークレーン5の走行位置からの制動距離が予測されるが、現在の位置から予測される制動距離だけ走行方向で前方側の位置からさらに前方側に位置する走行停止位置を、スタッカークレーン5を停止させる目標停止位置として更新設定する。なお、更新設定される前の目標走行停止位置は、その搬送作業(入庫作動又は出庫作業)での搬送元又は搬送先についての走行停止位置が設定されている。
【0043】
このように、スタッカークレーン5を停止させることができる走行停止位置のうち、走行方向で最も近い走行停止位置を選択して、スタッカークレーン5を当該選択した走行停止位置に停止させるので、情報取得用端末20が揺れ予測情報を取得してから極力短時間でスタッカークレーン5を走行停止位置に停止させることができ、一層高い確率で地震の揺れによる損傷を極力回避できる。
【0044】
一方、制御手段Hの昇降制御部Csvは、情報取得用端末20が揺れ予測情報を取得すると、スタッカークレーン5の昇降台15が収納部2から落下する物品Bにより損傷することを抑制できる損傷抑制昇降位置に昇降台15を位置させる。本実施形態では、情報取得用端末20が揺れ予測情報を取得すると、昇降制御部Csvが、スタッカークレーン5が停止する走行停止位置に対応する列(ベイ)の収納部2のうち物品Bが収納されている収納部2(制御手段Hが「在荷状態」として管理している収納部2)で最も上段に位置する収納部2よりも上方側の位置を損傷抑制昇降位置として設定するように構成されている。
【0045】
例えば、図4において、スタッカークレーン5が「バンクL」の物品収納棚3における「ベイ11」かつ「レベル5」の収納部2(図4で着色した物品B)を出庫元の収納部2として物品Bを出庫する場合において、出庫元の収納部2についての走行停止位置である「ベイ11」及び当該収納部2についての昇降停止位置である「レベル5」に対応した掬い移載作動用の昇降位置にスライドフォーク装置Fを位置させるべく、走行台車14を走行作動させ、かつ、昇降台15を昇降作動させているときに、情報取得用端末20が揺れ予測情報を取得すると、まず、走行制御部Cshにより目標走行停止位置が「ベイ11」から「ベイ7」に更新され、走行台車14が「ベイ7」の走行停止位置まで走行する。
【0046】
そして、「バンクL」及び「バンクR」の双方の物品収納棚3における収納部2のうち、更新後の目標走行停止位置である「ベイ7」の収納部2であって物品Bが収納されている収納部2で最も上段に位置する「レベル7」の収納部2の腕木材12よりも上方側の位置である当該収納部2に対する卸し移載作動用の昇降位置が損傷抑制昇降位置として設定される。つまり、出庫元の収納部2(「レベル5」)についての掬い移載作動用の昇降位置から「レベル7」の卸し移載作動用の昇降位置に目標昇降停止位置が更新され、スライドフォーク装置Fが「レベル7」の卸し移載作動用の昇降位置まで昇降する。
【0047】
このように、制御手段Hは、情報取得用端末20が揺れ予測情報を取得すると、地震対策処理の実行開始に伴って、昇降台15を損傷抑制昇降位置に位置させるべく、スタッカークレーン5の作動を制御するように構成されている。
【0048】
以下、制御手段Hが実行する地震対策処理の制御動作について、図6〜図8のフローチャートに基づき説明する。
【0049】
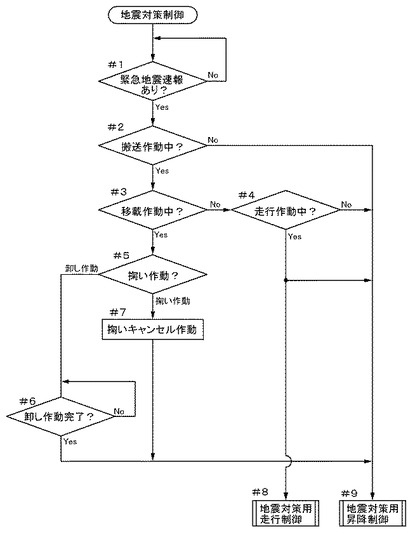
図6に示すように、制御手段Hは、情報取得用端末20が緊急地震速報を受信するまでは、地震対策制御の動作はステップ#1のループにて待機状態となっている。情報取得用端末20が緊急地震速報を受信するとステップ#1からステップ#2に以降し、搬送作動中であるか否か、換言すると上位コントローラからの入庫指令又は出庫指令の待機状態であるか否かが判別され、待機状態であれば、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。
【0050】
搬送作動中であれば、ステップ#2からステップ#3に移行し、搬送作動として移載作動中であるか否かが判別される。具体的には、搬送元や搬送先への走行作動及び昇降作動の双方が完了しているか否かが、クレーンコントローラCsからの完了情報に基づいて判別される。走行作動及び昇降作動の双方が完了していれば、移載作動中であると判断し、一方でも完了してなければ、移載作動中ではないと判断する。
【0051】
搬送作動中であっても移載作動中でなければ、ステップ#3からステップ#4に移行し、走行作動が完了しているかチェックする。走行作動が完了していなければ、ステップ#8の地震対策用走行制御及びステップ#9の地震対策用昇降制御の双方を実行する。走行作動が完了していれば、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。
【0052】
移載作動中であるために搬送作動中である場合は、ステップ#3からステップ#5に移行して移載作動の種別、つまり、掬い用移載作動であるか卸し用移載作動であるかがステップ#5で判別される。卸し作動であれば、ステップ#6に移行し、卸し作動が完了するまで待機し、卸し作動が完了した後に、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。なお、この卸し用移載作業を完了させることにより、制御手段Hは、在庫情報を更新する。
【0053】
掬い用移載作動中であれば、ステップ#5からステップ#7に移行し、当該掬い作動をキャンセルする。つまり、進行中の掬い作動を中断するとともに、それまで進行させた掬い作動とは逆向きの作動をさせて、当該掬い作動を開始した時点における状態に戻す。これにより、当該掬い移載作動の対象となっていた物品Bは、移載対象箇所に載置支持された状態に戻り、スライドフォーク装置Fは引退位置に引退し、昇降台15は、掬い移載作動用の昇降停止位置に戻ることになる。ステップ#7の掬いキャンセル作動が完了した後は、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。
【0054】
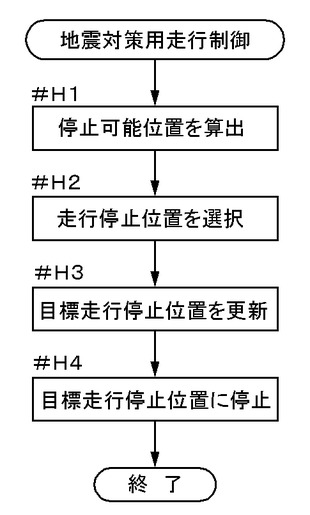
地震対策用走行制御は、図7に示すように、ステップ#H1で、制御手段Hの走行制御部Cshが、スタッカークレーン5の現在の走行速度から設定制動条件にて設定されている地震対策用の減速度で減速して停止する場合の制動距離を算出する。ステップ#H2で、スタッカークレーン5の現在位置から走行方向で制動距離だけ前方側の位置よりも更に前方側に位置する走行停止位置のうち、走行方向で現在位置に最も近いものが選択される。ステップ#H3で、走行制御部Cshが今般の搬送作動のために一次的に記憶している目標走行停止位置を、ステップ#H2で選択した走行停止位置に更新する。そして、ステップ#H4で、更新済みの目標走行停止位置にスタッカークレーン5を停止させる。
【0055】
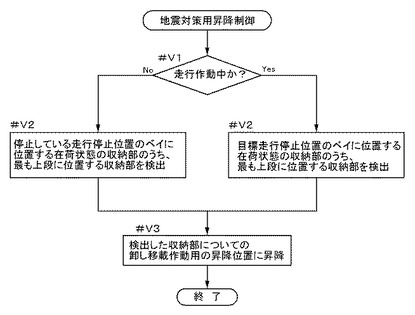
地震対策用昇降制御は、図8に示すように、ステップ#V1で、制御手段Hの昇降制御部Csvは、今般実行する地震対策用昇降制御が、走行作動中に実行されるものか、走行停止中に実行されるものかをチェックする。走行作動中である場合に地震対策用昇降制御を実行するときは、ステップ#V2aで、地震対策用昇降制御のステップ#H3で更新済みの目標走行停止位置のベイに位置する在荷状態の収納部2のうち、最も上段に位置する収納部2を検出し、ステップ#V3に移行して、ステップ#V2aにて検出済みの収納部2についての卸し移載作動用の昇降位置に昇降させる。
【0056】
走行作動中でない場合に地震対策用昇降制御を実行するときは、ステップ#V2bで、停止しているベイに位置する在荷状態の収納部2のうち、最も上段に位置する収納部2を検出し、ステップ#V3に移行して、ステップ#V2bにて検出済みの収納部2についての卸し移載作動用の昇降位置に昇降させる。ちなみに、該当ベイに位置する在荷状態の収納部2がない場合、つまり当該ベイの収納部2が全て空状態である場合は、当該ベイにおけるレベル1の収納部2についての掬い移載作動用の昇降位置に昇降させる。
【0057】
〔別の実施形態〕
以上、発明者によってなされた発明を発明の実施形態に基づき具体的に説明したが、本発明は上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。以下、本発明の別実施形態を例示する。
【0058】
(1)上記実施形態では、走行経路に沿って走行自在なスタッカークレーンが1台設けられた自動倉庫設備を例示したが、1本の走行経路に対して複数台(例えば、2台)のスタッカークレーンが設けられたものであってもよい。
【0059】
(2)上記実施形態では、収納部が奥行き方向に1個の物品を収納自在な物品収納棚を備えたものを例示したが、これに代えて、収納部が奥行き方向に複数個の物品を収納自在な物品収納棚を備えたものであってもよい。
【0060】
(3)上記実施形態では、スタッカークレーンが、収納部及び荷受台(移載対象箇所)と自己との間で物品を移載する移載装置として、移載方向に出退自在なスライドフォークを備えたフォーク式の移載装置を備えて構成されているものを例示したが、スタッカークレーンが備える移載装置としては、例えば、互いに接近離間する一対の把持部を出退自在に備えた移載装置や、物品の両側面部又は正面部に係合する係合部を出退自在に備えた移載装置など、種々の構成のものが考えられる。また、昇降台に移載装置を左右又は上下に並ぶ状態で複数台備えたものであってもよい。
【0061】
(4)上記実施形態では、制御手段Hの昇降制御部Csvが、スタッカークレーン5が地震対策処理により停止する走行停止位置に対応する列(ベイ)の収納部2のうち物品Bが収納されている収納部2(制御手段Hが「在荷状態」として管理している収納部2)で最も上段に位置する収納部2についての卸し移載作動用の昇降位置を損傷抑制昇降位置として設定するように構成されているものを例示したが、これ代えて、制御手段Hの昇降制御部Csvが、スタッカークレーン5が地震対策処理により停止する走行停止位置に対応する列(ベイ)の収納部2のうち物品Bが収納されている収納部2で最も上段に位置する収納部2よりも上段側に位置するいずれかの空き状態の収納部についての掬い移載作動用の昇降位置又は卸し移載作動用の昇降位置を損傷抑制昇降位置として設定するように構成されているものでもよい。
【0062】
(5)損傷抑制昇降位置として、複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置を設定してもよい。すなわち、上記実施形態でいうと「レベル8」の収納部2についての掬い移載作動用の昇降位置又は卸し移載作動用の昇降位置を損傷抑制昇降位置として設定してもよい。
【0063】
(6)上記実施形態では、情報取得用端末20が、インターネットNにより配信サーバ21に接続されたものを例示したが、情報取得用端末20が、専用回線にて配信サーバ21に接続されたものであってもよい。
【符号の説明】
【0064】
B 物品
Lh 走行経路
H 制御手段
1 自動倉庫設備
2 収納部
3 物品収納棚
5 スタッカークレーン
6 支柱対
6a・6b 前後一対の支柱
15 昇降台
20 揺れ予測情報取得手段
【技術分野】
【0001】
本発明は、物品を収納する収納部が上下方向に複数段に、かつ、横方向に複数列に配置された物品収納棚と、前記物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、前記収納部との間で物品を移載するべく前記スタッカークレーンの作動を制御する制御手段とが設けられ、前記スタッカークレーンが前記収納部との間で物品を移載するための走行停止位置が前記複数列の収納部の各列の夫々について設定され、前記制御手段が、地震による損傷を回避するべく前記スタッカークレーンの作動を制御する地震対策処理を実行するように構成されている自動倉庫設備に関する。
【背景技術】
【0002】
上記自動倉庫設備の従来例として、揺れ予測情報取得手段が揺れ予測情報を取得すると、走行作動中のスタッカークレーンを極力短い制度距離にて即時に停止させるために緊急停止用の減速度で減速させてそのまま停止させるものがある。(例えば、特許文献1の段落「0052」〜「0058」並びに図4及び図5参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−298520号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来例の自動倉庫設備であると、揺れ予測情報取得手段が揺れ予測情報を取得すると、走行作動中のスタッカークレーンを緊急停止用の減速度で減速させてそのまま停止させるため、制動距離によっては、前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成された物品収納棚の支柱対と棚横幅方向で一致する位置にスタッカークレーンが停止する場合があり、このような状態で物品収納棚とスタッカークレーンとが地震により揺れると、物品収納棚とスタッカークレーンとが互いに接触して設備が損傷するおそれがある。特に地震の震源が近い場合は、地震による揺れが大きくなる可能性が高く、物品収納棚とスタッカークレーンとの揺れが大きくなるおそれがあり、設備の損傷の可能性も高くなる。
このように、従来例のものでは、揺れ予測情報取得手段が揺れ予測情報を取得すると、走行作動中のスタッカークレーンを緊急停止用の減速度で減速させて走行作動中のスタッカークレーンを停止させるために、スタッカークレーンの停止位置によっては地震の揺れが到達した際に、物品収納棚とスタッカークレーンとが互いに接触して設備が損傷するおそれがある。
【0005】
本発明は上記実情に鑑みて為されたものであって、その目的は、地震の揺れによる損傷を極力回避できる自動倉庫設備を提供する点にある。
【課題を解決するための手段】
【0006】
この目的を達成するために、本発明に係る自動倉庫設備の第1特徴構成は、物品を収納する収納部が上下方向に複数段に、かつ、横方向に複数列に配置された物品収納棚と、前記物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、前記収納部との間で物品を移載するべく前記スタッカークレーンの作動を制御する制御手段とが設けられ、前記スタッカークレーンが前記収納部との間で物品を移載するための走行停止位置が前記複数列の収納部の各列の夫々について設定され、前記制御手段が、地震による損傷を回避するべく前記スタッカークレーンの作動を制御する地震対策処理を実行するように構成されている自動倉庫設備において、
前記物品収納棚が、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で前記支柱対の間に前記収納部が位置するように構成され、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、前記制御手段が、前記スタッカークレーンを走行作動させている場合において、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理として前記走行停止位置に前記スタッカークレーンを停止させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0007】
本特徴構成によれば、スタッカークレーンが走行作動している場合において、揺れ予測情報取得手段が揺れ予測情報を取得すると、制御手段が地震対策処理を実行することで、スタッカークレーンは走行停止位置、つまり、収納部との間で物品を移載するための位置に走行停止することになる。
物品収納棚は、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成されおり、収納部は、物品収納棚における支柱対の間に位置しているため、収納部との間で物品を移載するための位置である走行停止位置に停止したスタッカークレーンは、物品を移載する物品移載手段乃至その移載装置が搭載された昇降台が、隣接する支柱対の間に位置する状態となる。
昇降台は、スタッカークレーンの他の部分、例えば、走行台車や昇降台を昇降案内する一本又は前後一対の昇降マストに比べて、走行経路の横幅方向に幅広となっており、さらに、移載装置については、例えばスライドフォーク装置で構成される場合のように昇降台より更に走行経路の横幅方向に幅広となっている場合があるため、昇降台やそれに搭載されている移載装置が支柱対の間に位置する状態とすることで、地震による揺れによって、物品収納棚とスタッカークレーンとが大きく揺れても、物品収納棚とスタッカークレーンとが互いに接触して設備が損傷することを極力回避できる。
このように、本願発明によれば、地震の揺れによる損傷を極力回避できる自動倉庫設備を得るに至った。
【0008】
本発明に係る自動倉庫設備の第2特徴構成は、前記制御手段は、前記地震対策処理として、走行作動中の前記スタッカークレーンより走行方向で前方側に位置する前記走行停止位置のうち前記スタッカークレーンを停止させることができる前記走行停止位置を設定制動条件に基づいて判別し、停止可能と判別した前記走行停止位置のうち走行方向で最も近い前記走行停止位置を選択して、前記スタッカークレーンを当該選択した走行停止位置に停止させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0009】
本特徴構成によれば、スタッカークレーンが走行作動している状態で揺れ予測情報取得手段が揺れ予測情報を取得したときのスタッカークレーンの走行速度と、例えば、地震対策処理でスタッカークレーンを停止させる場合の減速度等の設定制動条件とによって、スタッカークレーンの制動距離が予測できることから、制御手段は、予測情報取得手段が揺れ予測情報を取得したときのスタッカークレーンの走行位置から予測される制動距離だけ走行方向で前方側の位置からさらに前方側に位置する走行停止位置を、スタッカークレーンを停止させることができる走行停止位置として他の走行停止位置と区別できる。
そして、スタッカークレーンを停止させることができる走行停止位置のうち、走行方向で最も近い走行停止位置を選択して、スタッカークレーンを当該選択した走行停止位置に停止させるので、揺れ予測情報取得手段が揺れ予測情報を取得してから極力短時間でスタッカークレーンを走行停止位置に停止させることができ、一層高い確率で地震の揺れによる損傷を極力回避できる。
【0010】
本発明に係る自動倉庫設備の第3特徴構成は、前記制御手段は、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンの昇降台が前記収納棚から落下する物品により損傷することを抑制できる損傷抑制昇降位置に前記昇降台を位置させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0011】
本特徴構成によれば、揺れ予測情報取得手段が揺れ予測情報を取得すると、昇降台は損傷抑制昇降位置に位置することになる。損傷抑制昇降位置はスタッカークレーンの昇降台が収納棚から落下する物品により損傷することを抑制できる位置であるため、地震の揺れによって収納棚から落下する物品により昇降台が損傷することを極力回避できる。傷抑制昇降位置としては、例えば、昇降台に対して物品が落下してこない位置、又は、物品が落下してきても昇降台の損傷を抑制できる位置である。
【0012】
本発明に係る自動倉庫設備の第4特徴構成は、前記損傷抑制昇降位置が、前記複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置である点にある。
【0013】
本特徴構成によれば、揺れ予測情報取得手段が揺れ予測情報を取得すると、昇降台は複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置に位置することになる。最上段の収納部より上方には物品が存在することはないため、昇降台が最上段昇降位置に位置している限り、地震の揺れによって収納棚から物品が昇降台に落下するとしてもその物品は最上段の収納部に収納されている物品であるから、落下速度が小さい状態で昇降台に衝突するに過ぎず、落下距離が長いために落下速度が大きい状態の物品が昇降台に衝突することを極力回避できる。このように、地震の揺れによって収納棚から落下する物品により昇降台が損傷することを一層高い確率で極力回避できる。
【0014】
本発明に係る自動倉庫設備の第5特徴構成は、前記制御手段は、前記収納部の夫々について物品が収納されているか否かを管理するように構成され、かつ、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンが停止する前記走行停止位置に対応する列の前記収納部のうち物品が収納されている前記収納部で最も上段に位置する前記収納部よりも上方側の位置を前記損傷抑制昇降位置として設定するように構成されている点にある。
【0015】
本特徴構成によれば、制御手段は、収納部の夫々について物品が収納されているか否かを管理しているので、走行停止位置に対応する列の収納部の夫々に物品が収納されているか否かを認識することができる。そのため、制御手段は、揺れ予測情報取得手段が揺れ予測情報を取得すると、地震対策処理を実行して、スタッカークレーンが停止する走行停止位置を決定するとともに、その走行停止位置に対応する列の収納部のうち物品が収納されている収納部で最も上段に位置する収納部を判別することができる。そして、制御手段は、該当する収納部よりも上方側の位置に昇降台を位置させることになる。つまり、昇降台は、スタッカークレーンが停止する走行停止位置に対応する列の収納部のうち物品が収納されている収納部で最も上段に位置する収納部よりも上方側の位置に位置することになる。
したがって、揺れ予測情報取得手段が揺れ予測情報を取得した後、昇降台を昇降方向で昇降させるに当って、極力低い位置に位置させることで、地震の揺れによって収納棚から落下する物品により昇降台が損傷することを回避でき、しかも、地震による揺れが到来するときのスタッカークレーンの重心を低重心化して極力安定した状態で地震による揺れを受けるようにして、設備の損傷を極力回避することができる。また、例えば、昇降台を上昇させて退避させる場合には、必要以上に高い位置まで上昇させることがないので、昇降台の昇降距離が極力短くなり、地震による揺れが到来するときには昇降台が停止した状態である可能性が高くなり、昇降台が昇降作動中に地震による揺れが到来して設備の損傷が拡大する不都合を極力防止できる。
【0016】
本発明に係る自動倉庫設備の第6特徴構成は、前記制御手段が、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理の実行開始に伴って、前記昇降台を前記損傷抑制昇降位置に位置させるべく、前記スタッカークレーンの作動を制御するように構成されている点にある。
【0017】
本特徴構成によれば、揺れ予測情報取得手段が揺れ予測情報を取得すると、制御手段は、地震対策処理の実行開始に伴って、昇降台を損傷抑制昇降位置に位置させるべく、スタッカークレーンの作動を制御するので、スタッカークレーンが走行作動している状態で揺れ予測情報取得手段が揺れ予測情報を取得すると、スタッカークレーンは、走行停止位置に走行停止するようにその走行作動が制御され、同時に、昇降台が損傷抑制昇降位置に位置するように昇降作動が制御される。これにより、揺れ予測情報取得手段が揺れ予測情報を取得した後、スタッカークレーンが走行停止するまでに要する時間と昇降台が昇降停止するまでに要する時間のうち長い方の時間が経過した時点で、スタッカークレーンは走行停止状態であり、かつ昇降停止状態となる。
したがって、例えば、スタッカークレーンが走行停止した後に昇降台を損傷抑制昇降位置まで昇降させる場合に比べて、短時間でスタッカークレーンの走行作動及び昇降作動の双方を停止させた状態とすることができる。これにより、スタッカークレーンの走行作動中又は昇降作動中に地震による揺れが到来して設備の損傷が拡大する不都合を極力防止できる。
【図面の簡単な説明】
【0018】
【図1】自動倉庫設備の全体斜視図
【図2】物品収納棚の一部拡大斜視図
【図3】スタッカークレーンの走行停止位置と収納部の列との対応関係を示す平面図
【図4】スタッカークレーンの走行停止位置と収納部の列との対応関係を示す側面図
【図5】制御ブロック図
【図6】地震対策制御のフローチャート
【図7】地震対策用走行制御のフローチャート
【図8】地震対策用昇降制御のフローチャート
【発明を実施するための形態】
【0019】
本発明に係る自動倉庫設備の実施形態を図面に基づいて説明する。自動倉庫設備1は、図1に示すように、物品Bを収納自在な収納部2を上下方向及び左右方向に並ぶ状態で配置して構成された物品収納棚3を一対備えている。一対の物品収納棚3は、夫々の収納部2の間口が相対向する状態で間隔を隔てて床面に設置されており、これらの一対の物品収納棚3の間において床面に敷設された軌道4に案内されて、軌道4に沿って一対の物品収納棚3の間に形成される走行経路Lhに沿って走行自在なスタッカークレーン5が一台設けられている。
【0020】
物品収納棚3は、棚前面側に位置する前側支柱6aと棚背面側に位置する後側支柱6bとからなる支柱対6を側面水平材7や側面ブレース材8により接続して構成された支柱枠9を棚横幅方向に等間隔にて複数個配置して、棚の背面側において各支柱枠9同士を背面水平ビーム材10及び背面垂直ブレース材11にて接続して構成されている。
【0021】
支柱枠9には、棚左右方向に水平面に沿って突出する腕木材12が上下方向に等間隔にて複数段(本実施形態では8段)の高さにおいて取り付けられており、隣接する支柱枠9の夫々に備えられた互いに対向する向きの一対の腕木材12・12にて物品Bの底面部(パレットP及びそのパレットPに載置される荷Wで構成される物品BにおけるパレットPの底面部)における左右両側部を支持することで、物品Bを載置支持自在となっている。
【0022】
このように、物品収納棚3は、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱6a・6bからなる支柱対6を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で支柱対6の間に収納部2が位置するように構成されている。
【0023】
スタッカークレーン5は、走行方向で前後一対の昇降案内マスト13a・13bが立設された走行台車14と、前後一対の昇降案内マスト13a・13bの間に形成される昇降経路Lvに沿って昇降自在な昇降台15と、昇降台15に一体昇降自在に装備されて、昇降台15側に引退させた引退位置と走行経路Lhの横幅方向で収納部2や荷受台16に突出させた突出位置との間で物品移載方向(走行経路Lhの横幅方向に同じ。)に出退自在なスライドフォーク装置Fとを備えて構成されている。
【0024】
スタッカークレーン5の走行作動、昇降台15の昇降作動、スライドフォーク装置Fの出退作動によって、物品収納棚3の各収納部2と、作業者がフォークリフト等で物品Bを搬出入する荷受台16との間で、各種の荷WをパレットP上に載せた状態の物品Bを搬送できるように構成されている。
【0025】
図1、図3及び図4に示すように、走行経路Lhの荷受台16が設けられている側の端部(以下HP側端部という。)の付近には、スタッカークレーン5に備えられたクレーンコントローラCsと赤外線光通信により各種の制御指令を通信自在な地上側コントローラCmが設置されている。地上側コントローラCmは、上位の管理コンピュータから出庫指令や入庫指令が指令されるその指令に従った入庫作業や出庫作業を処理するべく、スタッカークレーン5の作動を制御する。
【0026】
スタッカークレーン5が収納部2との間で物品Bを移載するための走行停止位置が複数列の収納部2の各列の夫々について設定されている。本実施形態では、図3及び図4に示すように、荷受台16についての走行停止位置「ベイ0」と各列についての走行停止位置「ベイ1」〜「ベイ15」との、合わせて16個の走行停止位置が設定されている。同様に、スタッカークレーン5が収納部2との間で物品Bを移載するための昇降停止位置が複数段の収納部2の各段の夫々について設定されている。本実施形態では、図4に示すように、各段についての昇降停止位置「レベル1」〜「レベル8」の8個の昇降停止位置が設定されている。
【0027】
ちなみに、荷受台16が物品Bを載置支持する高さは、物品収納棚3についての最下段の収納部2が物品Bを載置支持する高さに一致しているため、荷受台についての昇降停止位置は「レベル1」である。また、一対の物品収納棚3のうち、HPからOPに向かう方向視で走行経路Lhの左側の棚を「バンクL」の棚とし、右側の棚を「バンクR」の棚としている。
【0028】
スタッカークレーン5の作動を制御する制御手段の構成について図5に示す制御ブロック図に基づいて説明する。本実施形態では、制御手段Hは、地上側コントローラCm及びクレーンコントローラCsにて構成されている。
【0029】
クレーンコントローラCsの走行制御部Cshは、スタッカークレーン5の走行経路Lhにおける走行位置を検出する走行位置検出手段としての走行用レーザ距離計17の検出情報に基づいて、走行台車14を走行駆動する走行用モータM1の作動をフィードバック制御する。走行制御部Cshは、地上側コントローラCmから目標走行停止位置が指令されると、走行開始位置から目標走行停止位置まで、設定加速度にて加速し、設定定常速度にて走行して、設定減速度にて減速する形態で走行するための走行速度パターンを生成し、走行速度パターンにて与えられる現在の走行位置についての目標走行速度と現在の走行速度との偏差が小さくなるように、設定制御周期毎(例えば10〔mms〕毎)に走行用モータM1の作動をPID制御する。
【0030】
クレーンコントローラCsの昇降制御部Csvは、スタッカークレーン5の昇降経路Lvにおける昇降位置を検出する昇降位置検出手段としての昇降用レーザ距離計18の検出情報に基づいて、昇降台15を昇降駆動する昇降用モータM2の作動をフィードバック制御する。昇降制御部Csvは、地上側コントローラCmから目標昇降停止位置が指令されると、昇降開始位置から目標昇降停止位置まで、設定加速度にて加速し、設定定常速度にて昇降して、設定減速度にて減速する形態で昇降するための昇降速度パターンを生成し、昇降速度パターンにて与えられる現在の昇降位置についての目標昇降速度と現在の昇降速度との偏差が小さくなるように、設定制御周期毎(例えば10〔mms〕毎)に昇降用モータM2の作動をPID制御する。
【0031】
荷受台16や収納部2の物品移載対象箇所から物品Bを受け取る掬い移載作動は、物品移載対象箇所の物品支持高さ(例えば、収納部2の腕木材12の高さ)よりも下方側空間にスライドフォーク装置Fを突入させ、物品移載対象箇所へ物品Bを受け渡す卸し移載作動は、物品移載対象箇所の物品支持高さよりも上方側空間にスライドフォーク装置Fを突入させる。そのため、同じ移載対象箇所であっても卸し移載作動の場合の方が掬い移載作動の場合よりも、目標昇降停止位置として高い昇降位置が指令される。
【0032】
クレーンコントローラCsの出退制御部Csfは、スライドフォーク装置Fの突出量を検出する突出量検出手段としてのフォーク用ロータリエンコーダ19の検出情報に基づいて、スライドフォーク装置Fを出退駆動するフォーク用モータM3の作動をフィードバック制御する。出退制御部Csfは、地上側コントローラCmから突出開始指令が指令されると、引退位置から突出位置まで、設定加速度にて加速し、設定定常速度にて突出して、設定減速度にて減速する形態で突出するための突出速度パターンにて与えられる現在の突出位置についての目標突出速度と現在の突出速度との偏差が小さくなるように、設定制御周期毎(例えば5〔mms〕毎)にフォーク用モータM3の作動をPID制御する。
【0033】
地上側コントローラCmは、上位コンピュータから指令される入庫指令や出庫指令に基づいて、クレーンコントローラCsに対して、搬送元としての移載対象箇所(入庫作業であれば荷受台16、出庫作業であれば出庫対象の物品Bが収納されている収納部2)についての走行停止位置と昇降停止位置に昇降台15を位置させるために目標走行停止位置及び目標昇降停止位置を指令して走行作動及び昇降作動を完了させた後に、当該搬送元の移載対象箇所において物品Bを掬い作動にて移載するための突出開始指令、掬い移載用上昇指令及び引退開始指令を指令して、搬送元の移載対象箇所から搬送対象の物品Bを受け取った後、搬送先としての移載対象箇所(入庫作業であれば入庫対象の物品Bを収納する空き状態の収納部2、出庫作業であれば荷受台16)についての走行停止位置と昇降停止位置に昇降台15を位置させるための目標走行停止位置及び目標昇降停止位置を指令して走行作動及び昇降作動を完了させた後に、当該搬送先の移載対象箇所において物品Bを卸し作動にて移載するための突出開始指令、卸し移載用下降指令及び引退開始指令を指令して、搬送先の移載対象箇所に搬送対象の物品Bを受け渡させる。クレーンコントローラCsは、地上側コントローラCmからの各指令に基づく作動が完了すると当該完了した作動ごとに完了情報を地上側コントローラCmに送信する。
【0034】
地上側コントローラCmは、入庫作業での入庫先の収納部2に対する卸し移載作動において指令した引退開始指令に基づくスライドフォーク装置Fの引退作動が完了して、そのことを示す完了情報をクレーンコントローラCsから受信すると、入庫対象の物品Bの入庫が完了したとして、記憶部(図示せず。)に記憶されている在庫データベースにおける当該入庫先の収納部2についての物品存否情報を「空状態」から「在荷状態」に更新する。また、地上側コントローラCmは、出庫作業での出庫先の荷受台16に対する卸し移載作動において指令した引退開始指令に基づくスライドフォーク装置Fの引退作動が完了して、そのことを示す完了情報をクレーンコントローラCsから受信すると、出庫対象の物品Bの出庫が完了したとして、前記在庫データベースにおける当該出庫元の収納部2についての物品存否情報を「空状態」から「在荷状態」に更新する。このように、地上側コントローラCmは、収納部2の夫々について物品Bが収納されているか否かを管理している。
【0035】
制御手段Hには、地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段としての情報取得用端末20が接続されている。
【0036】
情報取得用端末20は、インターネットNを介して、現在時刻から地震による揺れ(例えば主要動)が発生するまでの予測時間を秒単位で示す予測時間情報や地震による揺れの予測強さを予測震度で示す予測強さ情報などの予測地震情報、及び、その更新情報を配信する配信サーバ21に接続されており、予測時間情報及びその予測時間を更新する更新情報を取得する予測時間取得手段と、予測強さ情報及びその予測強さを更新する更新情報を取得する予測強さ取得手段とを備えている。
【0037】
配信サーバ21は、気象庁のEPOS(地震活動等総合監視システム)(図外)から提供される予測時間情報や予測強さ情報などを含む予測地震情報及びその更新情報が入力されると、その都度、入力された予測地震情報及び更新情報を情報取得用端末20に配信するように構成されている。
【0038】
この自動倉庫設備1の制御手段Hは、地震による損傷を回避するべくスタッカークレーン5の作動を制御する地震対策処理を実行するように構成されている。以下、制御手段Hが実行する地震対策処理について説明する。
【0039】
制御手段Hの走行制御部Cshは、スタッカークレーン5を走行作動させている場合において、情報取得用端末20が揺れ予測情報を取得すると、地震対策処理として走行停止位置にスタッカークレーン5を停止させる。収納部2は、物品収納棚3における支柱枠9の間に位置しているため、収納部2との間で物品Bを移載するための位置である走行停止位置に停止したスタッカークレーンは、物品Bを移載するスライドフォーク装置F乃至スライドフォーク装置Fが搭載された昇降台15が、隣接する支柱枠9の間に位置する状態となる。昇降台15は、スタッカークレーン5の他の部分、例えば、走行台車14や前後一対の昇降案内マスト13a・13bに比べて、走行経路Lhの横幅方向に幅広となっており、さらに、スライドフォーク装置Fについては、昇降台15より更に走行経路Lhの横幅方向に幅広となっている場合があるため、昇降台15やそれに搭載されているスライドフォーク装置Fが支柱枠9の間に位置する状態とすることで、地震による揺れによって、物品収納棚3とスタッカークレーン5とが大きく揺れても、物品収納棚3とスタッカークレーン5とが互いに接触して自動倉庫設備1が損傷することを極力回避できる。
【0040】
なお、地震対策処理によりスタッカークレーン5が荷受台16についての走行停止位置に停止する場合もあるが、以下では、物品収納棚3とスタッカークレーン5との相互の接触による損傷を回避することを説明するため、スタッカークレーン5が、物品収納棚3の収納部2についての走行停止位置に停止する場合に注目して説明する。
【0041】
走行制御部Cshは、地震対策処理として、走行作動中のスタッカークレーン5より走行方向で前方側に位置する走行停止位置のうちスタッカークレーン5を停止させることができる走行停止位置を設定制動条件に基づいて判別し、停止可能と判別した走行停止位置のうち走行方向で最も近い走行停止位置を選択して、スタッカークレーン5を当該選択した走行停止位置に停止させる。本実施形態では、設定制動条件として、入庫作業や出庫作業における走行速度パターンに基づく減速状態での減速度よりも大きな減速度にて走行停止するまで減速することを条件としている。
【0042】
説明を加えると、走行制御部Cshは、スタッカークレーン5が走行作動している状態で情報取得用端末20が揺れ予測情報を取得したときのスタッカークレーン5の走行速度と、上記設定制動条件とによって、スタッカークレーンを設定制動条件で停止させた場合の制動距離を予測する。ちなみに、走行制御部Cshは、走行用レーザ距離計17の検出情報の時間変化率からスタッカークレーン5の現在の走行速度を算出するが、この走行速度は、上述した走行作動のPID制御のために算出するので、これを流用できる。こうして、情報取得用端末20が揺れ予測情報を取得したときのスタッカークレーン5の走行位置からの制動距離が予測されるが、現在の位置から予測される制動距離だけ走行方向で前方側の位置からさらに前方側に位置する走行停止位置を、スタッカークレーン5を停止させる目標停止位置として更新設定する。なお、更新設定される前の目標走行停止位置は、その搬送作業(入庫作動又は出庫作業)での搬送元又は搬送先についての走行停止位置が設定されている。
【0043】
このように、スタッカークレーン5を停止させることができる走行停止位置のうち、走行方向で最も近い走行停止位置を選択して、スタッカークレーン5を当該選択した走行停止位置に停止させるので、情報取得用端末20が揺れ予測情報を取得してから極力短時間でスタッカークレーン5を走行停止位置に停止させることができ、一層高い確率で地震の揺れによる損傷を極力回避できる。
【0044】
一方、制御手段Hの昇降制御部Csvは、情報取得用端末20が揺れ予測情報を取得すると、スタッカークレーン5の昇降台15が収納部2から落下する物品Bにより損傷することを抑制できる損傷抑制昇降位置に昇降台15を位置させる。本実施形態では、情報取得用端末20が揺れ予測情報を取得すると、昇降制御部Csvが、スタッカークレーン5が停止する走行停止位置に対応する列(ベイ)の収納部2のうち物品Bが収納されている収納部2(制御手段Hが「在荷状態」として管理している収納部2)で最も上段に位置する収納部2よりも上方側の位置を損傷抑制昇降位置として設定するように構成されている。
【0045】
例えば、図4において、スタッカークレーン5が「バンクL」の物品収納棚3における「ベイ11」かつ「レベル5」の収納部2(図4で着色した物品B)を出庫元の収納部2として物品Bを出庫する場合において、出庫元の収納部2についての走行停止位置である「ベイ11」及び当該収納部2についての昇降停止位置である「レベル5」に対応した掬い移載作動用の昇降位置にスライドフォーク装置Fを位置させるべく、走行台車14を走行作動させ、かつ、昇降台15を昇降作動させているときに、情報取得用端末20が揺れ予測情報を取得すると、まず、走行制御部Cshにより目標走行停止位置が「ベイ11」から「ベイ7」に更新され、走行台車14が「ベイ7」の走行停止位置まで走行する。
【0046】
そして、「バンクL」及び「バンクR」の双方の物品収納棚3における収納部2のうち、更新後の目標走行停止位置である「ベイ7」の収納部2であって物品Bが収納されている収納部2で最も上段に位置する「レベル7」の収納部2の腕木材12よりも上方側の位置である当該収納部2に対する卸し移載作動用の昇降位置が損傷抑制昇降位置として設定される。つまり、出庫元の収納部2(「レベル5」)についての掬い移載作動用の昇降位置から「レベル7」の卸し移載作動用の昇降位置に目標昇降停止位置が更新され、スライドフォーク装置Fが「レベル7」の卸し移載作動用の昇降位置まで昇降する。
【0047】
このように、制御手段Hは、情報取得用端末20が揺れ予測情報を取得すると、地震対策処理の実行開始に伴って、昇降台15を損傷抑制昇降位置に位置させるべく、スタッカークレーン5の作動を制御するように構成されている。
【0048】
以下、制御手段Hが実行する地震対策処理の制御動作について、図6〜図8のフローチャートに基づき説明する。
【0049】
図6に示すように、制御手段Hは、情報取得用端末20が緊急地震速報を受信するまでは、地震対策制御の動作はステップ#1のループにて待機状態となっている。情報取得用端末20が緊急地震速報を受信するとステップ#1からステップ#2に以降し、搬送作動中であるか否か、換言すると上位コントローラからの入庫指令又は出庫指令の待機状態であるか否かが判別され、待機状態であれば、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。
【0050】
搬送作動中であれば、ステップ#2からステップ#3に移行し、搬送作動として移載作動中であるか否かが判別される。具体的には、搬送元や搬送先への走行作動及び昇降作動の双方が完了しているか否かが、クレーンコントローラCsからの完了情報に基づいて判別される。走行作動及び昇降作動の双方が完了していれば、移載作動中であると判断し、一方でも完了してなければ、移載作動中ではないと判断する。
【0051】
搬送作動中であっても移載作動中でなければ、ステップ#3からステップ#4に移行し、走行作動が完了しているかチェックする。走行作動が完了していなければ、ステップ#8の地震対策用走行制御及びステップ#9の地震対策用昇降制御の双方を実行する。走行作動が完了していれば、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。
【0052】
移載作動中であるために搬送作動中である場合は、ステップ#3からステップ#5に移行して移載作動の種別、つまり、掬い用移載作動であるか卸し用移載作動であるかがステップ#5で判別される。卸し作動であれば、ステップ#6に移行し、卸し作動が完了するまで待機し、卸し作動が完了した後に、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。なお、この卸し用移載作業を完了させることにより、制御手段Hは、在庫情報を更新する。
【0053】
掬い用移載作動中であれば、ステップ#5からステップ#7に移行し、当該掬い作動をキャンセルする。つまり、進行中の掬い作動を中断するとともに、それまで進行させた掬い作動とは逆向きの作動をさせて、当該掬い作動を開始した時点における状態に戻す。これにより、当該掬い移載作動の対象となっていた物品Bは、移載対象箇所に載置支持された状態に戻り、スライドフォーク装置Fは引退位置に引退し、昇降台15は、掬い移載作動用の昇降停止位置に戻ることになる。ステップ#7の掬いキャンセル作動が完了した後は、走行方向に関しては現状を維持し、昇降方向に関してはステップ#9の地震対策用昇降制御を実行する。
【0054】
地震対策用走行制御は、図7に示すように、ステップ#H1で、制御手段Hの走行制御部Cshが、スタッカークレーン5の現在の走行速度から設定制動条件にて設定されている地震対策用の減速度で減速して停止する場合の制動距離を算出する。ステップ#H2で、スタッカークレーン5の現在位置から走行方向で制動距離だけ前方側の位置よりも更に前方側に位置する走行停止位置のうち、走行方向で現在位置に最も近いものが選択される。ステップ#H3で、走行制御部Cshが今般の搬送作動のために一次的に記憶している目標走行停止位置を、ステップ#H2で選択した走行停止位置に更新する。そして、ステップ#H4で、更新済みの目標走行停止位置にスタッカークレーン5を停止させる。
【0055】
地震対策用昇降制御は、図8に示すように、ステップ#V1で、制御手段Hの昇降制御部Csvは、今般実行する地震対策用昇降制御が、走行作動中に実行されるものか、走行停止中に実行されるものかをチェックする。走行作動中である場合に地震対策用昇降制御を実行するときは、ステップ#V2aで、地震対策用昇降制御のステップ#H3で更新済みの目標走行停止位置のベイに位置する在荷状態の収納部2のうち、最も上段に位置する収納部2を検出し、ステップ#V3に移行して、ステップ#V2aにて検出済みの収納部2についての卸し移載作動用の昇降位置に昇降させる。
【0056】
走行作動中でない場合に地震対策用昇降制御を実行するときは、ステップ#V2bで、停止しているベイに位置する在荷状態の収納部2のうち、最も上段に位置する収納部2を検出し、ステップ#V3に移行して、ステップ#V2bにて検出済みの収納部2についての卸し移載作動用の昇降位置に昇降させる。ちなみに、該当ベイに位置する在荷状態の収納部2がない場合、つまり当該ベイの収納部2が全て空状態である場合は、当該ベイにおけるレベル1の収納部2についての掬い移載作動用の昇降位置に昇降させる。
【0057】
〔別の実施形態〕
以上、発明者によってなされた発明を発明の実施形態に基づき具体的に説明したが、本発明は上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。以下、本発明の別実施形態を例示する。
【0058】
(1)上記実施形態では、走行経路に沿って走行自在なスタッカークレーンが1台設けられた自動倉庫設備を例示したが、1本の走行経路に対して複数台(例えば、2台)のスタッカークレーンが設けられたものであってもよい。
【0059】
(2)上記実施形態では、収納部が奥行き方向に1個の物品を収納自在な物品収納棚を備えたものを例示したが、これに代えて、収納部が奥行き方向に複数個の物品を収納自在な物品収納棚を備えたものであってもよい。
【0060】
(3)上記実施形態では、スタッカークレーンが、収納部及び荷受台(移載対象箇所)と自己との間で物品を移載する移載装置として、移載方向に出退自在なスライドフォークを備えたフォーク式の移載装置を備えて構成されているものを例示したが、スタッカークレーンが備える移載装置としては、例えば、互いに接近離間する一対の把持部を出退自在に備えた移載装置や、物品の両側面部又は正面部に係合する係合部を出退自在に備えた移載装置など、種々の構成のものが考えられる。また、昇降台に移載装置を左右又は上下に並ぶ状態で複数台備えたものであってもよい。
【0061】
(4)上記実施形態では、制御手段Hの昇降制御部Csvが、スタッカークレーン5が地震対策処理により停止する走行停止位置に対応する列(ベイ)の収納部2のうち物品Bが収納されている収納部2(制御手段Hが「在荷状態」として管理している収納部2)で最も上段に位置する収納部2についての卸し移載作動用の昇降位置を損傷抑制昇降位置として設定するように構成されているものを例示したが、これ代えて、制御手段Hの昇降制御部Csvが、スタッカークレーン5が地震対策処理により停止する走行停止位置に対応する列(ベイ)の収納部2のうち物品Bが収納されている収納部2で最も上段に位置する収納部2よりも上段側に位置するいずれかの空き状態の収納部についての掬い移載作動用の昇降位置又は卸し移載作動用の昇降位置を損傷抑制昇降位置として設定するように構成されているものでもよい。
【0062】
(5)損傷抑制昇降位置として、複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置を設定してもよい。すなわち、上記実施形態でいうと「レベル8」の収納部2についての掬い移載作動用の昇降位置又は卸し移載作動用の昇降位置を損傷抑制昇降位置として設定してもよい。
【0063】
(6)上記実施形態では、情報取得用端末20が、インターネットNにより配信サーバ21に接続されたものを例示したが、情報取得用端末20が、専用回線にて配信サーバ21に接続されたものであってもよい。
【符号の説明】
【0064】
B 物品
Lh 走行経路
H 制御手段
1 自動倉庫設備
2 収納部
3 物品収納棚
5 スタッカークレーン
6 支柱対
6a・6b 前後一対の支柱
15 昇降台
20 揺れ予測情報取得手段
【特許請求の範囲】
【請求項1】
物品を収納する収納部が上下方向に複数段に、かつ、横方向に複数列に配置された物品収納棚と、
前記物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、
前記収納部との間で物品を移載するべく前記スタッカークレーンの作動を制御する制御手段とが設けられ、
前記スタッカークレーンが前記収納部との間で物品を移載するための走行停止位置が前記複数列の収納部の各列の夫々について設定され、
前記制御手段が、地震による損傷を回避するべく前記スタッカークレーンの作動を制御する地震対策処理を実行するように構成されている自動倉庫設備であって、
前記物品収納棚が、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で前記支柱対の間に前記収納部が位置するように構成され、
地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、
前記制御手段が、前記スタッカークレーンを走行作動させている場合において、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理として前記走行停止位置に前記スタッカークレーンを停止させるべく、前記スタッカークレーンの作動を制御するように構成されている自動倉庫設備。
【請求項2】
前記制御手段は、前記地震対策処理として、走行作動中の前記スタッカークレーンより走行方向で前方側に位置する前記走行停止位置のうち前記スタッカークレーンを停止させることができる前記走行停止位置を設定制動条件に基づいて判別し、停止可能と判別した前記走行停止位置のうち走行方向で最も近い前記走行停止位置を選択して、前記スタッカークレーンを当該選択した走行停止位置に停止させるべく、前記スタッカークレーンの作動を制御するように構成されている請求項1記載の自動倉庫設備。
【請求項3】
前記制御手段は、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンの昇降台が前記収納棚から落下する物品により損傷することを抑制できる損傷抑制昇降位置に前記昇降台を位置させるべく、前記スタッカークレーンの作動を制御するように構成されている請求項1又は2記載の自動倉庫設備。
【請求項4】
前記損傷抑制昇降位置が、前記複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置である請求項3記載の自動倉庫設備。
【請求項5】
前記制御手段は、前記収納部の夫々について物品が収納されているか否かを管理するように構成され、かつ、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンが停止する前記走行停止位置に対応する列の前記収納部のうち物品が収納されている前記収納部で最も上段に位置する前記収納部よりも上方側の位置を前記損傷抑制昇降位置として設定するように構成されている請求項3記載の自動倉庫設備。
【請求項6】
前記制御手段が、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理の実行開始に伴って、前記昇降台を前記損傷抑制昇降位置に位置させるべく、前記スタッカークレーンの作動を制御するように構成されている請求項3〜5の何れか一項記載の自動倉庫設備。
【請求項1】
物品を収納する収納部が上下方向に複数段に、かつ、横方向に複数列に配置された物品収納棚と、
前記物品収納棚の前面側に設定された走行経路に沿って走行自在なスタッカークレーンと、
前記収納部との間で物品を移載するべく前記スタッカークレーンの作動を制御する制御手段とが設けられ、
前記スタッカークレーンが前記収納部との間で物品を移載するための走行停止位置が前記複数列の収納部の各列の夫々について設定され、
前記制御手段が、地震による損傷を回避するべく前記スタッカークレーンの作動を制御する地震対策処理を実行するように構成されている自動倉庫設備であって、
前記物品収納棚が、棚前面側と背面側とに棚奥行き方向に並べて配置される前後一対の支柱からなる支柱対を棚横幅方向に間隔を隔てて複数立設して構成され、かつ、棚横幅方向で前記支柱対の間に前記収納部が位置するように構成され、
地震による揺れが発生することを知らせる揺れ予測情報を受信する揺れ予測情報取得手段が設けられ、
前記制御手段が、前記スタッカークレーンを走行作動させている場合において、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理として前記走行停止位置に前記スタッカークレーンを停止させるべく、前記スタッカークレーンの作動を制御するように構成されている自動倉庫設備。
【請求項2】
前記制御手段は、前記地震対策処理として、走行作動中の前記スタッカークレーンより走行方向で前方側に位置する前記走行停止位置のうち前記スタッカークレーンを停止させることができる前記走行停止位置を設定制動条件に基づいて判別し、停止可能と判別した前記走行停止位置のうち走行方向で最も近い前記走行停止位置を選択して、前記スタッカークレーンを当該選択した走行停止位置に停止させるべく、前記スタッカークレーンの作動を制御するように構成されている請求項1記載の自動倉庫設備。
【請求項3】
前記制御手段は、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンの昇降台が前記収納棚から落下する物品により損傷することを抑制できる損傷抑制昇降位置に前記昇降台を位置させるべく、前記スタッカークレーンの作動を制御するように構成されている請求項1又は2記載の自動倉庫設備。
【請求項4】
前記損傷抑制昇降位置が、前記複数段の収納部のうち最上段の収納部に対する物品の移載を行う昇降位置として設定された最上段昇降位置である請求項3記載の自動倉庫設備。
【請求項5】
前記制御手段は、前記収納部の夫々について物品が収納されているか否かを管理するように構成され、かつ、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記スタッカークレーンが停止する前記走行停止位置に対応する列の前記収納部のうち物品が収納されている前記収納部で最も上段に位置する前記収納部よりも上方側の位置を前記損傷抑制昇降位置として設定するように構成されている請求項3記載の自動倉庫設備。
【請求項6】
前記制御手段が、前記揺れ予測情報取得手段が前記揺れ予測情報を取得すると、前記地震対策処理の実行開始に伴って、前記昇降台を前記損傷抑制昇降位置に位置させるべく、前記スタッカークレーンの作動を制御するように構成されている請求項3〜5の何れか一項記載の自動倉庫設備。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−103822(P2013−103822A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249986(P2011−249986)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]