
自動潅水装置
【課題】 高い希釈精度でリアルタイムに希釈液肥を生成すること。
【解決手段】 本発明の自動潅水装置1は、液肥Fを供給する液肥供給部2と、加圧された水Wを供給する水供給部3と、該両供給部からの液肥F及び水Wを混合してなる希釈液肥Wfを貯留する混合タンク4と、液肥Fの流量を計測する液肥流量センサー6と、水Wの流量を計測する水流量センサー7と、該混合タンク4内の液位を計測する液位センサー8と、該両供給部を制御する制御部9とを備えている。制御部9は、前記液位が所定の下限を下回っていることを検知すると、給水バルブ18を開かせて水Wの流量を水流量センサー7で計測し、所要の希釈倍数による液肥Fの量を演算し、該量の液肥Fを吐出するように微少吐出ポンプ13を作動させる。同時に液肥流量センサー6による液肥Fの流量及び前記演算による液肥Fの流量の差違を即時に演算し、微少吐出ポンプ13の作動にフィードバックする。
【解決手段】 本発明の自動潅水装置1は、液肥Fを供給する液肥供給部2と、加圧された水Wを供給する水供給部3と、該両供給部からの液肥F及び水Wを混合してなる希釈液肥Wfを貯留する混合タンク4と、液肥Fの流量を計測する液肥流量センサー6と、水Wの流量を計測する水流量センサー7と、該混合タンク4内の液位を計測する液位センサー8と、該両供給部を制御する制御部9とを備えている。制御部9は、前記液位が所定の下限を下回っていることを検知すると、給水バルブ18を開かせて水Wの流量を水流量センサー7で計測し、所要の希釈倍数による液肥Fの量を演算し、該量の液肥Fを吐出するように微少吐出ポンプ13を作動させる。同時に液肥流量センサー6による液肥Fの流量及び前記演算による液肥Fの流量の差違を即時に演算し、微少吐出ポンプ13の作動にフィードバックする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液肥と水を混合してなる希釈液肥を植物に対し自動的に供給する自動潅水装置に関するものである。
【背景技術】
【0002】
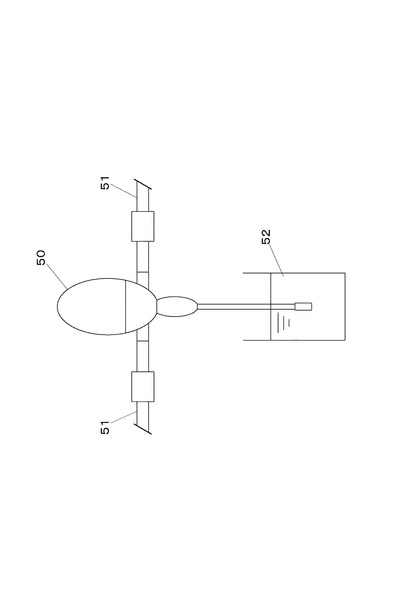
従来技術としては、非特許文献1に記載された比例式液肥混入器を例示する。図5に示すように、この液肥混入器50は、潅水配管51の途中に挿入され、潅水配管51内を流れる水流により内部モータ(図示略)が上下運動し、これにより該水流の水量に応じた希釈液肥52を吸入して前記潅水配管51内に混入するように構成されている。この液肥混入器50では、前記内部モータの上下運動のストローク数が水流の流量に比例する構造となっているので、希釈液肥52の希釈倍率は該内部モータの1ストロークあたりのストローク長で調節するように構成されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】株式会社サンホープ、"比例式液肥混入器ドサトロン"、[Online]、[平成23年10月17日検索]、インターネット<URL:http://www.sunhope.com/subdrv/catalog_DL/dosatron_0606.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、従来の液肥混入器50は、希釈倍率がせいぜい500倍程度までであり、それを超える希釈倍率での潅水のときには液肥を予め希釈したもの(52)を供給する必要があるという課題がある。また、希釈液肥52の希釈倍率が前記内部モータのストローク長で調節するように構成されているので、高倍率で希釈させようとすると、該ストローク長が短くなり、希釈液肥52の吸入精度、すなわち希釈精度が低下するという課題もある。
【課題を解決するための手段】
【0005】
前記課題を解決するために、本発明の自動潅水装置は、
液肥と水を混合してなる希釈液肥を植物に対し自動的に供給する自動潅水装置であって、
前記液肥を微少吐出ポンプにより供給する液肥供給部と、電気的駆動弁を介して加圧された水を供給する水供給部と、該液肥供給部及び該水供給部からそれぞれ供給された液肥及び水を混合するとともに、該混合により生成された前記希釈液肥を貯留する混合タンクと、該混合タンクから該希釈液肥を吸入し前記植物に供給する潅水部と、前記液肥供給部から供給された液肥の流量を計測する液肥流量センサーと、前記水供給部から供給された水の流量を計測する水流量センサーと、該混合タンク内の液位を計測する液位センサーと、該液肥供給部及び該水供給部を制御する制御部とを備え、
前記制御部は、前記液位センサーにより前記混合タンク内の液位が所定の下限を下回っていることを検知すると、該液位センサーにより該液位が所定の上限に達したことを検知するまでの間、閉じていた前記電気的駆動弁を開くように作動させて前記混合タンクに水を供給させ、該水の流量を水流量センサーにより計測し、所要の希釈倍数による液肥の量を演算し、該量の液肥を吐出するように前記微少吐出ポンプを作動させるとともに、前記液肥流量センサーにより計測された液肥の流量及び前記演算された液肥の量の差違を即時に演算し、前記微少吐出ポンプの作動にフィードバックするように構成されている。
【0006】
この構成によれば、液肥を供給する前記微少吐出ポンプをフィードバック制御するように構成されているので、高倍率でも高い希釈精度で希釈液肥を生成することができる。しかも、加圧された水の流量に応じた量の液肥をリアルタイムに前記混合タンクに供給するので、該混合タンク内の希釈液肥の濃度を常に一定に保つことができる。このため、希釈液肥の生成とは非同期に前記潅水ポンプにより該混合タンク内の該希釈液肥を取り出すことができる。
【0007】
前記自動潅水装置としては、
前記水供給部は、水道管及び前記混合タンクを接続する水供給路を通じて水を供給するように構成されており、
該水供給路の前記混合タンク側の吐出口は、該混合タンクにおける所定の上限の液位よりも高位置から水を注入するように構成された態様を例示する。
【0008】
この構成によれば、前記水供給部の出力側としての吐出口が、希釈液肥から物理的に分離されることにより、前記混合タンク内の液肥が水道管に逆流することを防止できる。
【発明の効果】
【0009】
本発明に係る希釈液肥製造装置によれば、高い希釈精度でリアルタイムに希釈液肥を生成することができるという優れた効果を奏する。
【図面の簡単な説明】
【0010】
【図1】本発明を具体化した一実施形態に係る自動潅水装置の全体構成図である。
【図2】同自動潅水装置の微少吐出ポンプの制御を実現する制御系の構成を示すブロック図である。
【図3】同自動潅水装置の動作例を示すタイミングチャートである。
【図4】同自動潅水装置により潅水される緑化用培土基盤の側断面図である。
【図5】従来例としての比例式液肥混入器の設置例を示す図である。
【発明を実施するための形態】
【0011】
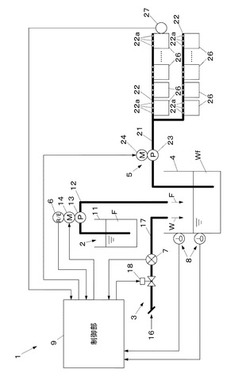
図1〜図4は本発明を液肥Fと水Wを混合してなる希釈液肥Wfを植物が植設された緑化用培土基盤26に対し自動的に供給する自動潅水装置1に具体化した一実施形態を示している。この自動潅水装置1は、図1に示すように、液肥Fを微少吐出ポンプ13により供給する液肥供給部2と、電気的駆動弁としての給水バルブ18を介して加圧された水Wを供給する水供給部3と、該液肥供給部2及び該水供給部3からそれぞれ供給された液肥F及び水Wを混合するとともに、該混合により生成された希釈液肥Wfを貯留する混合タンク4と、該混合タンク4から該希釈液肥Wfを吸入し潅水路を通じて前記植物に供給する潅水部5と、液肥供給部2から供給された液肥Fの流量を計測する液肥流量センサー6と、水供給部3から供給された水Wの流量を計測する水流量センサー7と、該混合タンク4内の液位を計測する液位センサー8と、該液肥供給部2、該水供給部3及び該潅水部5を制御する制御部9とを備えている。
【0012】
液肥供給部2は、液肥F(原液)を貯留する液肥タンク11と、液肥タンク11及び混合タンク4を接続する液肥供給路12と、該液肥供給路12に設けられ、該液肥タンク11の液肥Fを吸入し混合タンク4に供給する微少吐出ポンプ13とを備えている。微少吐出ポンプ13としては、例えば一般的なチューブポンプと呼ばれている、数mL/minを供給できるものを採用できる。
【0013】
水供給部3は、水道管16及び混合タンク4を接続する水供給路17を通じて、水道からの加圧された水Wを供給するように構成されており、該水供給路17には水Wの流路を開閉するための給水バルブ18が設けられている。
【0014】
混合タンク4には、液肥供給路12、水供給路17及び潅水路21が接続されている。液肥供給路12及び水供給路17の混合タンク側の吐出口は、混合タンク4における所定の上限の液位よりも高位置から水W及び液肥Fをそれぞれ注入するように構成されている。
【0015】
潅水部5は、混合タンク4に接続された潅水路21を通じて、緑化用培土基盤26に潅水する複数の潅水孔22aを有する潅水チューブ22に希釈液肥Wfを供給するように構成されている。潅水路21には、混合タンク4内の希釈液肥Wfを吸入し潅水チューブ22に供給する潅水ポンプ23が設けられている。潅水ポンプ23の制御方法としては、特に限定されないが、本例では緑化用培土基盤26に設置した水分センサー27が計測した水分の値によって潅水ポンプ23を駆動するモータ24を作動させる方法を例示する。
【0016】
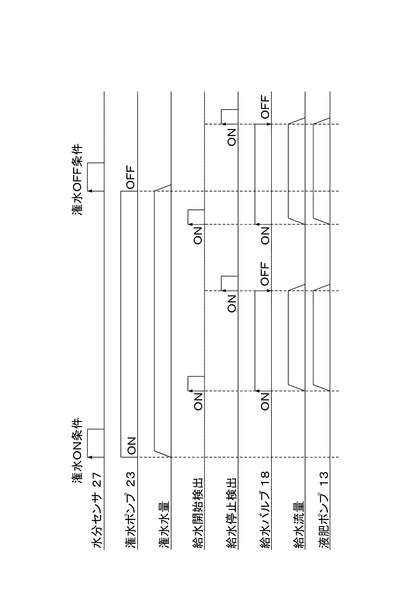
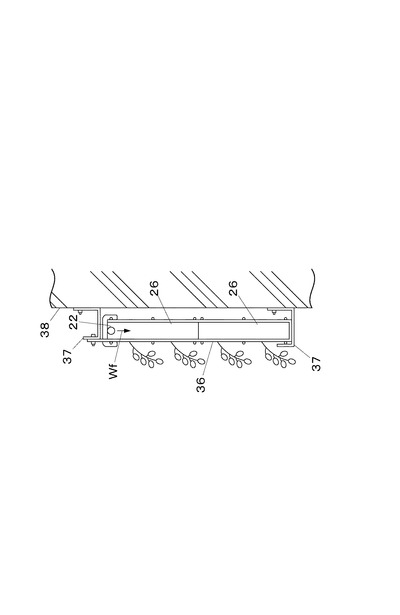
本例の緑化用培土基盤26は、図4に示すように、緑化用培土基盤26を保持する枠部材36と、該枠部材36を構造物の壁面38に対して着脱可能に支持する樋部材37とを介して該壁面38に配設されている。
【0017】
液肥流量センサー6としては、液肥供給路12の液肥Fの流量を計測可能なものであれば特に限定されないが、本例では微少吐出ポンプ13を駆動するモータ14の回転を回転検出器により検出することにより、該微少吐出ポンプ13から吐出される液肥Fの流量を検出するように構成されている。
【0018】
水流量センサー7としては、水供給路17の水Wの流量を計測可能なものであれば特に限定されない。
【0019】
液位センサー8は、混合タンク4内の液位が、所定の下限を下回っていること又は所定の上限を上回っていることを検出可能なものであれば特に限定されないが、本例では所定の上限及び所定の下限にそれぞれ配設されたフロートスイッチにより所定の上限及び所定の下限をそれぞれ検出するように構成されている。
【0020】
制御部9は、液位センサー8により混合タンク4内の液位が所定の下限を下回っていることを検知すると、該液位センサー8により該液位が所定の上限に達したことを検知するまでの間、閉じていた給水バルブ18を開くように作動させて混合タンク4に水Wを供給させると同時に、該水Wの流量に応じた液肥Fを混合タンク4に供給するように微少吐出ポンプ13を制御するように構成されている。
【0021】
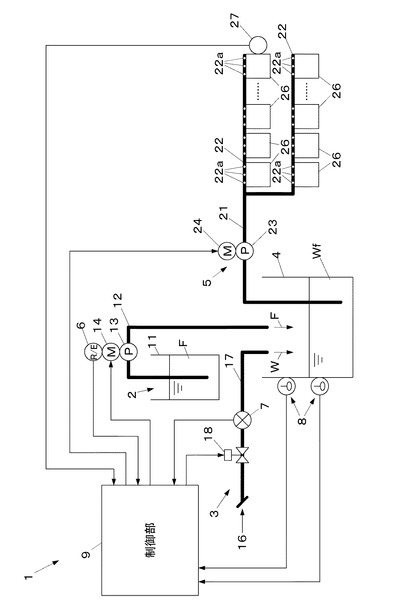
図2は、この微少吐出ポンプ13の制御を実現する制御系の構成を示すブロック図である。制御部9は、同図に示す目標液肥流量演算器31と、液肥流量制御器32とを備えている。目標液肥流量演算器31は、水流量センサー7により計測された水Wの流量に基づき、所要の希釈倍数による液肥Fの流量を演算するように構成されている。液肥流量制御器32は、目標液肥流量演算器31により演算された液肥Fの流量と、液肥流量センサー6により計測された液肥Fの流量との偏差を入力し、微少吐出ポンプ13を駆動するモータ14の駆動回路14aに対する制御信号を生成するように構成されている。このように、本制御系では液肥流量センサー6により計測された液肥Fの流量がフィードバックされるようになっている。
【0022】
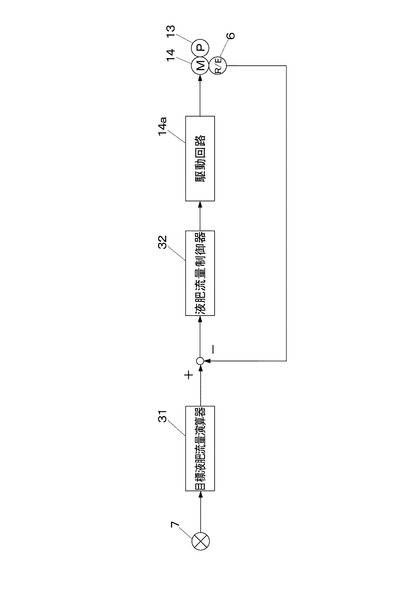
次に本自動潅水装置1の動作例について、図3に示すタイミングチャートを参照しながら説明する。自動潅水装置1の初期状態として、水分センサー27による測定値は潅水ON条件(緑化用培土基盤26の水分値が潅水ON条件用の所定値未満であるという条件)を満たしておらず、潅水ポンプ23は停止しており、混合タンク4内の希釈液肥Wfの液位は、所定の上限と所定の下限の間にあり、給水バルブ18は閉じているものとする。
【0023】
緑化用培土基盤26に設置された水分センサー27により所定の潅水ON条件が満たされると、制御部9は潅水ポンプ23を作動させることにより、潅水チューブ22に希釈液肥Wfを供給する。そして、潅水によって水分センサー27の所定の潅水OFF条件(緑化用培土基盤26の水分値が潅水OFF条件用の所定値以上であるという条件)が満足されると、制御部9は潅水ポンプ23を停止させる。
【0024】
また、この潅水ポンプ23の作動により、混合タンク4内の液量が所定の下限を下回ったことが液位センサー8により検知されると、制御部9は給水バルブ18を開いて水Wを混合タンク4に供給するとともに、水供給路17の流量に応じた液肥Fを混合タンク4に供給することにより、混合タンク4内に希釈液肥Wfを補充する。そして、この補充により、混合タンク4内の液量が所定の上限を上回ったことが液位センサー8により検知されると、制御部9は、給水バルブ18を閉じるとともに微少吐出ポンプ13を停止させる。この希釈液肥Wfの補充動作は、混合タンク4内の液位に応じて繰り返される。
【0025】
以上のように構成された本例の自動潅水装置1によれば、液肥Fを供給する微少吐出ポンプ13をフィードバック制御するように構成されているので、高倍率でも高い希釈精度で希釈液肥Wfを生成することができる。しかも、加圧された水Wの流量に応じた量の液肥Fをリアルタイムに混合タンク4に供給するので、該混合タンク4内の希釈液肥Wfの濃度を常に一定に保つことができる。このため、希釈液肥Wfの生成とは非同期に潅水ポンプ23により該混合タンク4内の該希釈液肥Wfを取り出すことができる。
【0026】
また、水供給部3は、水道管16及び混合タンク4を接続する水供給路17を通じて水Wを供給するように構成されており、該水供給路17の前記混合タンク側の吐出口は、該混合タンク4における所定の上限の液位よりも高位置から水Wを注入するように構成されているので、該水供給部3の出力側としての吐出口が、希釈液肥から物理的に分離されることにより、混合タンク4内の液肥Fが水道管16に逆流することを防止できる。
【0027】
なお、本発明は前記実施形態に限定されるものではなく、例えば以下のように、発明の趣旨から逸脱しない範囲で適宜変更して具体化することもできる。
(1)本発明を、平面的な屋上緑化や、ハウス栽培の植物に対して潅水するように構成すること。
(2)本発明を、緑化用培土基盤以外の培土に育生された植物に対して潅水するように構成すること。
【符号の説明】
【0028】
1 自動潅水装置
2 液肥供給部
3 水供給部
4 混合タンク
5 潅水部
6 液肥流量センサー
7 水流量センサー
8 液位センサー
9 制御部
11 液肥タンク
12 液肥供給路
13 微少吐出ポンプ
14 モータ
14a 駆動回路
16 水道管
17 水供給路
18 給水バルブ
21 潅水路
22 潅水チューブ
22a 潅水孔
23 潅水ポンプ
26 緑化用培土基盤
27 水分センサー
31 目標液肥流量演算器
32 液肥流量制御器
36 枠部材
37 樋部材
38 壁面
F 液肥
W 水
Wf 希釈液肥
【技術分野】
【0001】
本発明は、液肥と水を混合してなる希釈液肥を植物に対し自動的に供給する自動潅水装置に関するものである。
【背景技術】
【0002】
従来技術としては、非特許文献1に記載された比例式液肥混入器を例示する。図5に示すように、この液肥混入器50は、潅水配管51の途中に挿入され、潅水配管51内を流れる水流により内部モータ(図示略)が上下運動し、これにより該水流の水量に応じた希釈液肥52を吸入して前記潅水配管51内に混入するように構成されている。この液肥混入器50では、前記内部モータの上下運動のストローク数が水流の流量に比例する構造となっているので、希釈液肥52の希釈倍率は該内部モータの1ストロークあたりのストローク長で調節するように構成されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】株式会社サンホープ、"比例式液肥混入器ドサトロン"、[Online]、[平成23年10月17日検索]、インターネット<URL:http://www.sunhope.com/subdrv/catalog_DL/dosatron_0606.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、従来の液肥混入器50は、希釈倍率がせいぜい500倍程度までであり、それを超える希釈倍率での潅水のときには液肥を予め希釈したもの(52)を供給する必要があるという課題がある。また、希釈液肥52の希釈倍率が前記内部モータのストローク長で調節するように構成されているので、高倍率で希釈させようとすると、該ストローク長が短くなり、希釈液肥52の吸入精度、すなわち希釈精度が低下するという課題もある。
【課題を解決するための手段】
【0005】
前記課題を解決するために、本発明の自動潅水装置は、
液肥と水を混合してなる希釈液肥を植物に対し自動的に供給する自動潅水装置であって、
前記液肥を微少吐出ポンプにより供給する液肥供給部と、電気的駆動弁を介して加圧された水を供給する水供給部と、該液肥供給部及び該水供給部からそれぞれ供給された液肥及び水を混合するとともに、該混合により生成された前記希釈液肥を貯留する混合タンクと、該混合タンクから該希釈液肥を吸入し前記植物に供給する潅水部と、前記液肥供給部から供給された液肥の流量を計測する液肥流量センサーと、前記水供給部から供給された水の流量を計測する水流量センサーと、該混合タンク内の液位を計測する液位センサーと、該液肥供給部及び該水供給部を制御する制御部とを備え、
前記制御部は、前記液位センサーにより前記混合タンク内の液位が所定の下限を下回っていることを検知すると、該液位センサーにより該液位が所定の上限に達したことを検知するまでの間、閉じていた前記電気的駆動弁を開くように作動させて前記混合タンクに水を供給させ、該水の流量を水流量センサーにより計測し、所要の希釈倍数による液肥の量を演算し、該量の液肥を吐出するように前記微少吐出ポンプを作動させるとともに、前記液肥流量センサーにより計測された液肥の流量及び前記演算された液肥の量の差違を即時に演算し、前記微少吐出ポンプの作動にフィードバックするように構成されている。
【0006】
この構成によれば、液肥を供給する前記微少吐出ポンプをフィードバック制御するように構成されているので、高倍率でも高い希釈精度で希釈液肥を生成することができる。しかも、加圧された水の流量に応じた量の液肥をリアルタイムに前記混合タンクに供給するので、該混合タンク内の希釈液肥の濃度を常に一定に保つことができる。このため、希釈液肥の生成とは非同期に前記潅水ポンプにより該混合タンク内の該希釈液肥を取り出すことができる。
【0007】
前記自動潅水装置としては、
前記水供給部は、水道管及び前記混合タンクを接続する水供給路を通じて水を供給するように構成されており、
該水供給路の前記混合タンク側の吐出口は、該混合タンクにおける所定の上限の液位よりも高位置から水を注入するように構成された態様を例示する。
【0008】
この構成によれば、前記水供給部の出力側としての吐出口が、希釈液肥から物理的に分離されることにより、前記混合タンク内の液肥が水道管に逆流することを防止できる。
【発明の効果】
【0009】
本発明に係る希釈液肥製造装置によれば、高い希釈精度でリアルタイムに希釈液肥を生成することができるという優れた効果を奏する。
【図面の簡単な説明】
【0010】
【図1】本発明を具体化した一実施形態に係る自動潅水装置の全体構成図である。
【図2】同自動潅水装置の微少吐出ポンプの制御を実現する制御系の構成を示すブロック図である。
【図3】同自動潅水装置の動作例を示すタイミングチャートである。
【図4】同自動潅水装置により潅水される緑化用培土基盤の側断面図である。
【図5】従来例としての比例式液肥混入器の設置例を示す図である。
【発明を実施するための形態】
【0011】
図1〜図4は本発明を液肥Fと水Wを混合してなる希釈液肥Wfを植物が植設された緑化用培土基盤26に対し自動的に供給する自動潅水装置1に具体化した一実施形態を示している。この自動潅水装置1は、図1に示すように、液肥Fを微少吐出ポンプ13により供給する液肥供給部2と、電気的駆動弁としての給水バルブ18を介して加圧された水Wを供給する水供給部3と、該液肥供給部2及び該水供給部3からそれぞれ供給された液肥F及び水Wを混合するとともに、該混合により生成された希釈液肥Wfを貯留する混合タンク4と、該混合タンク4から該希釈液肥Wfを吸入し潅水路を通じて前記植物に供給する潅水部5と、液肥供給部2から供給された液肥Fの流量を計測する液肥流量センサー6と、水供給部3から供給された水Wの流量を計測する水流量センサー7と、該混合タンク4内の液位を計測する液位センサー8と、該液肥供給部2、該水供給部3及び該潅水部5を制御する制御部9とを備えている。
【0012】
液肥供給部2は、液肥F(原液)を貯留する液肥タンク11と、液肥タンク11及び混合タンク4を接続する液肥供給路12と、該液肥供給路12に設けられ、該液肥タンク11の液肥Fを吸入し混合タンク4に供給する微少吐出ポンプ13とを備えている。微少吐出ポンプ13としては、例えば一般的なチューブポンプと呼ばれている、数mL/minを供給できるものを採用できる。
【0013】
水供給部3は、水道管16及び混合タンク4を接続する水供給路17を通じて、水道からの加圧された水Wを供給するように構成されており、該水供給路17には水Wの流路を開閉するための給水バルブ18が設けられている。
【0014】
混合タンク4には、液肥供給路12、水供給路17及び潅水路21が接続されている。液肥供給路12及び水供給路17の混合タンク側の吐出口は、混合タンク4における所定の上限の液位よりも高位置から水W及び液肥Fをそれぞれ注入するように構成されている。
【0015】
潅水部5は、混合タンク4に接続された潅水路21を通じて、緑化用培土基盤26に潅水する複数の潅水孔22aを有する潅水チューブ22に希釈液肥Wfを供給するように構成されている。潅水路21には、混合タンク4内の希釈液肥Wfを吸入し潅水チューブ22に供給する潅水ポンプ23が設けられている。潅水ポンプ23の制御方法としては、特に限定されないが、本例では緑化用培土基盤26に設置した水分センサー27が計測した水分の値によって潅水ポンプ23を駆動するモータ24を作動させる方法を例示する。
【0016】
本例の緑化用培土基盤26は、図4に示すように、緑化用培土基盤26を保持する枠部材36と、該枠部材36を構造物の壁面38に対して着脱可能に支持する樋部材37とを介して該壁面38に配設されている。
【0017】
液肥流量センサー6としては、液肥供給路12の液肥Fの流量を計測可能なものであれば特に限定されないが、本例では微少吐出ポンプ13を駆動するモータ14の回転を回転検出器により検出することにより、該微少吐出ポンプ13から吐出される液肥Fの流量を検出するように構成されている。
【0018】
水流量センサー7としては、水供給路17の水Wの流量を計測可能なものであれば特に限定されない。
【0019】
液位センサー8は、混合タンク4内の液位が、所定の下限を下回っていること又は所定の上限を上回っていることを検出可能なものであれば特に限定されないが、本例では所定の上限及び所定の下限にそれぞれ配設されたフロートスイッチにより所定の上限及び所定の下限をそれぞれ検出するように構成されている。
【0020】
制御部9は、液位センサー8により混合タンク4内の液位が所定の下限を下回っていることを検知すると、該液位センサー8により該液位が所定の上限に達したことを検知するまでの間、閉じていた給水バルブ18を開くように作動させて混合タンク4に水Wを供給させると同時に、該水Wの流量に応じた液肥Fを混合タンク4に供給するように微少吐出ポンプ13を制御するように構成されている。
【0021】
図2は、この微少吐出ポンプ13の制御を実現する制御系の構成を示すブロック図である。制御部9は、同図に示す目標液肥流量演算器31と、液肥流量制御器32とを備えている。目標液肥流量演算器31は、水流量センサー7により計測された水Wの流量に基づき、所要の希釈倍数による液肥Fの流量を演算するように構成されている。液肥流量制御器32は、目標液肥流量演算器31により演算された液肥Fの流量と、液肥流量センサー6により計測された液肥Fの流量との偏差を入力し、微少吐出ポンプ13を駆動するモータ14の駆動回路14aに対する制御信号を生成するように構成されている。このように、本制御系では液肥流量センサー6により計測された液肥Fの流量がフィードバックされるようになっている。
【0022】
次に本自動潅水装置1の動作例について、図3に示すタイミングチャートを参照しながら説明する。自動潅水装置1の初期状態として、水分センサー27による測定値は潅水ON条件(緑化用培土基盤26の水分値が潅水ON条件用の所定値未満であるという条件)を満たしておらず、潅水ポンプ23は停止しており、混合タンク4内の希釈液肥Wfの液位は、所定の上限と所定の下限の間にあり、給水バルブ18は閉じているものとする。
【0023】
緑化用培土基盤26に設置された水分センサー27により所定の潅水ON条件が満たされると、制御部9は潅水ポンプ23を作動させることにより、潅水チューブ22に希釈液肥Wfを供給する。そして、潅水によって水分センサー27の所定の潅水OFF条件(緑化用培土基盤26の水分値が潅水OFF条件用の所定値以上であるという条件)が満足されると、制御部9は潅水ポンプ23を停止させる。
【0024】
また、この潅水ポンプ23の作動により、混合タンク4内の液量が所定の下限を下回ったことが液位センサー8により検知されると、制御部9は給水バルブ18を開いて水Wを混合タンク4に供給するとともに、水供給路17の流量に応じた液肥Fを混合タンク4に供給することにより、混合タンク4内に希釈液肥Wfを補充する。そして、この補充により、混合タンク4内の液量が所定の上限を上回ったことが液位センサー8により検知されると、制御部9は、給水バルブ18を閉じるとともに微少吐出ポンプ13を停止させる。この希釈液肥Wfの補充動作は、混合タンク4内の液位に応じて繰り返される。
【0025】
以上のように構成された本例の自動潅水装置1によれば、液肥Fを供給する微少吐出ポンプ13をフィードバック制御するように構成されているので、高倍率でも高い希釈精度で希釈液肥Wfを生成することができる。しかも、加圧された水Wの流量に応じた量の液肥Fをリアルタイムに混合タンク4に供給するので、該混合タンク4内の希釈液肥Wfの濃度を常に一定に保つことができる。このため、希釈液肥Wfの生成とは非同期に潅水ポンプ23により該混合タンク4内の該希釈液肥Wfを取り出すことができる。
【0026】
また、水供給部3は、水道管16及び混合タンク4を接続する水供給路17を通じて水Wを供給するように構成されており、該水供給路17の前記混合タンク側の吐出口は、該混合タンク4における所定の上限の液位よりも高位置から水Wを注入するように構成されているので、該水供給部3の出力側としての吐出口が、希釈液肥から物理的に分離されることにより、混合タンク4内の液肥Fが水道管16に逆流することを防止できる。
【0027】
なお、本発明は前記実施形態に限定されるものではなく、例えば以下のように、発明の趣旨から逸脱しない範囲で適宜変更して具体化することもできる。
(1)本発明を、平面的な屋上緑化や、ハウス栽培の植物に対して潅水するように構成すること。
(2)本発明を、緑化用培土基盤以外の培土に育生された植物に対して潅水するように構成すること。
【符号の説明】
【0028】
1 自動潅水装置
2 液肥供給部
3 水供給部
4 混合タンク
5 潅水部
6 液肥流量センサー
7 水流量センサー
8 液位センサー
9 制御部
11 液肥タンク
12 液肥供給路
13 微少吐出ポンプ
14 モータ
14a 駆動回路
16 水道管
17 水供給路
18 給水バルブ
21 潅水路
22 潅水チューブ
22a 潅水孔
23 潅水ポンプ
26 緑化用培土基盤
27 水分センサー
31 目標液肥流量演算器
32 液肥流量制御器
36 枠部材
37 樋部材
38 壁面
F 液肥
W 水
Wf 希釈液肥
【特許請求の範囲】
【請求項1】
液肥と水を混合してなる希釈液肥を植物に対し自動的に供給する自動潅水装置であって、
前記液肥を微少吐出ポンプにより供給する液肥供給部と、電気的駆動弁を介して加圧された水を供給する水供給部と、該液肥供給部及び該水供給部からそれぞれ供給された液肥及び水を混合するとともに、該混合により生成された前記希釈液肥を貯留する混合タンクと、該混合タンクから該希釈液肥を吸入し前記植物に供給する潅水部と、前記液肥供給部から供給された液肥の流量を計測する液肥流量センサーと、前記水供給部から供給された水の流量を計測する水流量センサーと、該混合タンク内の液位を計測する液位センサーと、該液肥供給部及び該水供給部を制御する制御部とを備え、
前記制御部は、前記水位センサーにより前記混合タンク内の液位が所定の下限を下回っていることを検知すると、該水位センサーにより該液位が所定の上限に達したことを検知するまでの間、閉じていた前記電気的駆動弁を開くように作動させて前記混合タンクに水を供給させ、該水の流量を水流量センサーにより計測し、所要の希釈倍数による液肥の量を演算し、該量の液肥を吐出するように前記微少吐出ポンプを作動させるとともに、前記液肥流量センサーにより計測された液肥の流量及び前記演算された液肥の量の差違を即時に演算し、前記微少吐出ポンプの作動にフィードバックするように構成された自動潅水装置。
【請求項2】
前記水供給部は、水道管及び前記混合タンクを接続する水供給路を通じて水を供給するように構成されており、
該水供給路の前記混合タンク側の吐出口は、該混合タンクにおける所定の上限の液位よりも高位置から水を注入するように構成された請求項1記載の自動潅水装置。
【請求項1】
液肥と水を混合してなる希釈液肥を植物に対し自動的に供給する自動潅水装置であって、
前記液肥を微少吐出ポンプにより供給する液肥供給部と、電気的駆動弁を介して加圧された水を供給する水供給部と、該液肥供給部及び該水供給部からそれぞれ供給された液肥及び水を混合するとともに、該混合により生成された前記希釈液肥を貯留する混合タンクと、該混合タンクから該希釈液肥を吸入し前記植物に供給する潅水部と、前記液肥供給部から供給された液肥の流量を計測する液肥流量センサーと、前記水供給部から供給された水の流量を計測する水流量センサーと、該混合タンク内の液位を計測する液位センサーと、該液肥供給部及び該水供給部を制御する制御部とを備え、
前記制御部は、前記水位センサーにより前記混合タンク内の液位が所定の下限を下回っていることを検知すると、該水位センサーにより該液位が所定の上限に達したことを検知するまでの間、閉じていた前記電気的駆動弁を開くように作動させて前記混合タンクに水を供給させ、該水の流量を水流量センサーにより計測し、所要の希釈倍数による液肥の量を演算し、該量の液肥を吐出するように前記微少吐出ポンプを作動させるとともに、前記液肥流量センサーにより計測された液肥の流量及び前記演算された液肥の量の差違を即時に演算し、前記微少吐出ポンプの作動にフィードバックするように構成された自動潅水装置。
【請求項2】
前記水供給部は、水道管及び前記混合タンクを接続する水供給路を通じて水を供給するように構成されており、
該水供給路の前記混合タンク側の吐出口は、該混合タンクにおける所定の上限の液位よりも高位置から水を注入するように構成された請求項1記載の自動潅水装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−102710(P2013−102710A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−247338(P2011−247338)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000100469)みのる産業株式会社 (158)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000100469)みのる産業株式会社 (158)
【Fターム(参考)】
[ Back to top ]