
自動耕耘植付機
【課題】 植林作業前の耕耘作業及び植林作業を、連続的に行うことが可能な自動耕耘植付機を提供することを目的とする。
【解決手段】 自走式移動装置のアーム部に取り付けられて使用される自動耕耘植付機であって、前記アーム部に固定される固定フレーム(F)部と、前記固定フレーム部に対して昇降可能な植穴を掘削する一対のカッターバー付きオーガを回転可能に備えたオーガ部(O)と、前記固定フレームに対し前記オーガ部とは独立に昇降可能で、下端開口部(12d)に開閉可能な開閉手段(18)を有する前記植穴に苗木を投入するためのプランティングチューブ(12)とを有する。
【解決手段】 自走式移動装置のアーム部に取り付けられて使用される自動耕耘植付機であって、前記アーム部に固定される固定フレーム(F)部と、前記固定フレーム部に対して昇降可能な植穴を掘削する一対のカッターバー付きオーガを回転可能に備えたオーガ部(O)と、前記固定フレームに対し前記オーガ部とは独立に昇降可能で、下端開口部(12d)に開閉可能な開閉手段(18)を有する前記植穴に苗木を投入するためのプランティングチューブ(12)とを有する。
【発明の詳細な説明】
【背景技術】
【0001】
近年、環境保護などの観点から、植林地に苗木を人工的に植える植林が行われるようになっている。この植林作業は、植林地に多数の植穴を掘削し、この植穴に苗木を投入した後、植穴を埋め戻し、展圧するという動作を繰り返し行うことにより、多数の苗木を植林していく。
【0002】
これらの作業を、手作業で行うと、作業者の肉体的な負担が大きくなるため、植穴の掘削〜展圧までの作業を自動化した、自動耕耘植付機が提案されている(例えば、特許文献1参照)。
【0003】
この特許文献1に開示された自動耕耘植付機は、空気コンベアから出力される空気圧によって苗木を植穴に案内する案内筒を有しており、この案内筒の先端には、植林地に植穴を掘削するための中空オーガが設けられている。
【0004】
この中空オーガは、ねじ羽根が周設された逆円錐状の周壁を中心線方向に二分割したオーガであり、この二分割された中空オーガの周壁の半円形の上端縁中央部は、それぞれ、苗木案内筒の下端部に揺動自在に取り付けられている。
【0005】
苗木の植付作業を行うときには、苗木案内筒をその中心軸周りに回転させながら、下方に駆動する。このとき、二分割された中空オーガは、閉じ状態にあり、苗木案内筒と一体となって、回転しながら下方に移動するため、植林地の地面がオーガによって掘削され、植穴が形成される。植穴を切削した後は、中空オーガを開き方向に駆動して、苗木案内筒の開口端を開放し、空気コンベアから出力される空気圧により苗木を植穴に送り込む。そして、苗木を送り込んだ後は、展圧板によって植穴を埋め戻し、展圧する。
【特許文献1】特開平9−201136号公報(第6図など)
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、植林した苗木の周りにこの苗木よりも大きな雑草が生えている場合、雑草により日光が遮断されるため、苗木の成長が妨げられるおそれがある。このため、特許文献1に記載の自動耕耘植付機によって植林する場合には、あらかじめ植林地の雑草を刈り、苗木に日光が当たりやすい環境を整えておく必要がある。
【0007】
しかしながら、この自動苗木植付装置には、雑草を排除する機能が組み込まれていないため、植林の前作業として、雑草を根こそぎ排除する耕耘作業を行う必要があり、多大な労力を必要としていた。
【0008】
そこで、本願発明は、植林作業前の耕耘作業及び植林作業を、連続的に行うことが可能な自動耕耘植付機を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本願発明に係る自走式移動装置のアーム部に取り付けられて使用される自動耕耘植付機であって、前記アーム部に固定される固定フレーム部と、前記固定フレーム部に対して昇降可能な植穴を掘削する一対のカッターバー付きオーガを回転可能に備えたオーガ部と、前記固定フレームに対し前記オーガ部とは独立に昇降可能で、下端開口部に開閉可能な開閉手段を有する前記植穴に苗木を投入するためのプランティングチューブとを有することを特徴とする。
【0010】
ここで、オーガ部を昇降させる第1の駆動手段と、前記一対のカッターバー付きオーガを回転させる第2の駆動手段と、前記プランティングチューブを昇降させる第3の駆動手段と、前記開閉手段を駆動する第4の駆動手段と、前記第1、第2、第3及び第4の駆動手段の駆動を制御する制御手段とを設け、前記制御手段に、プランティングチューブとの干渉を避けるオーガ待機位置に位置する前記オーガ部を回転させながら下方に移動させ、植林地下の堀削位置まで掘削する第1の動作と、前記堀削位置まで掘削した後、前記オーガ部を前記オーガ待機位置まで回転させながら上昇させて、停止する第2の動作と、該第2の動作によって前記オーガ部が前記オーガ待機位置に停止している状態において、前記オーガ待機位置よりも上方に位置する前記オーガ部との干渉を避けるプランティングチューブ待機位置にて待機している前記プランティングチューブを、堀削土中の苗木投入位置まで下降させる第3の動作と、前記苗木投入位置に前記プランティングチューブが位置する状態で、前記開閉手段を開き方向に駆動して、前記堀削土中に植付空間を形成する第4の動作と、該第4の動作によって形成された前記植付空間に、苗木が投入された後、前記プランティングチューブを前記プランティングチューブ待機位置まで上昇させる第5の動作と、該第5の動作が終了した後に、前記オーガ部を下降させ、前記カッターバーを前記堀削土に押し付けることにより、展圧する第6の動作とが行われるように前記第1、第2、第3及び第4の駆動手段を制御させるとよい。
【0011】
また、前記プランティングチューブは、前記一対のカッターバー付きオーガの間に配置すると良い。
【0012】
また、前記オーガ部に、前記第2の駆動手段を収容するボックスを設け、前記ボックスに、前記プランティングチューブに対して退避した退避形状部を形成すると良い。
さらに、前記第2の動作において、前記オーガ部を前記オーガ待機位置に停止さ
せるとき、前記制御手段を用いて、前記第一対のカッターバーが、前記一対のカッターバー付きオーガの各軸を結ぶ直線に対して、略45度の角度で停止するように、前記第2の駆動手段を制御するとよい。
【発明の効果】
【0013】
本願発明によれば、一対のカッターバー付きオーガを回転させながら下降させることにより、植穴を形成するとともに植穴周辺の雑草を根こそぎ排除することができ、また、プランティングチューブを、オーガ部に対して独立して下降させることにより、植穴に苗木を投入することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を図面に示す実施例を参照しながら説明する。
【実施例1】
【0015】
本発明による自動耕耘植付機は、例えば自走式の土木或いは建設用機器の一つであるバックホウ(ユンボ)等の可動アームの先端部に取り付けられて使用されるもので、該バックホウの可動アームを操作して自動耕耘植付機を苗の植付地面から上方の所定高さ位置に垂直姿勢に保持され、該バックホウの運転席からの操作により動作する。本実施例の自動耕耘植付機の駆動源は油圧を用いており、この油圧源は例えばバックホウに装備される油圧源を利用している。
【0016】
本実施例による自動耕耘植付機の概略構成は、バックホウのアーム部材の先端に固定される固定フレーム部と、前記固定フレーム部に対して昇降可能な植穴を略平面視8の字状に堀削する一対のオーガを回転可能に備えたオーガ部と、前記固定フレームに対し前記オーガ部とは独立に昇降可能で、前記植穴に苗木を投入するためのプランティングチューブとを備えている。
【0017】
一対のオーガは、中央に配したプランティングチューブの左右両側に配置され、上下方向に延びるオーガ軸の下端に、両端部が上方に折れ曲ると共に該オーガ軸を中心として互いに逆向きに捩じれた翼形に形成された略一文字のカッターバーが固定された構成としている。各オーガは、互いに反対方向に回転し、それぞれ所定方向に回転することにより、一対のカッターバーが地面を平面視略8の字形に掘り進み、植穴を掘る。その際、前記植穴にはカッターバーによる堀削土が柔らかな状態で残っており、そこに下端部が尖って閉塞状態のプランティングチューブを突き刺し、該閉塞状態の下端部を拡開すると堀削土が押し広げられて苗木の植付空間が確保される。
【0018】
そして、プランティングチューブに苗木を送り込むと、苗木は重力落下により該植穴の植付空間に投入される。その後にプランティングチューブを引き上げると、苗木の回りを堀削土が埋めるがこれだけでは苗木をしっかりと植付できないので、一対のオーガを降下させてカッターバーにより苗木の周りの土を展圧するようにしている。
【0019】
本実施の形態では、一対のオーガで植穴を平面視略8の字形状に形成することで、苗木の植付部分の両側を大きくカッターバーで堀削することになり、その際雑草を根こそぎ断ち切ってしまい、苗木の植付部分の周辺において雑草の繁殖を抑えることができる。
【0020】
以下、本実施の形態の自動耕耘植付機の詳細な構成を図1〜図8に基づいて説明する。
【0021】
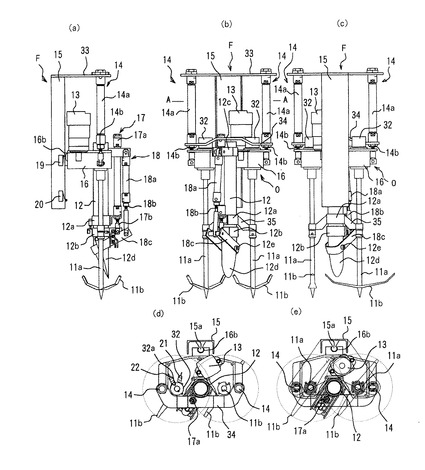
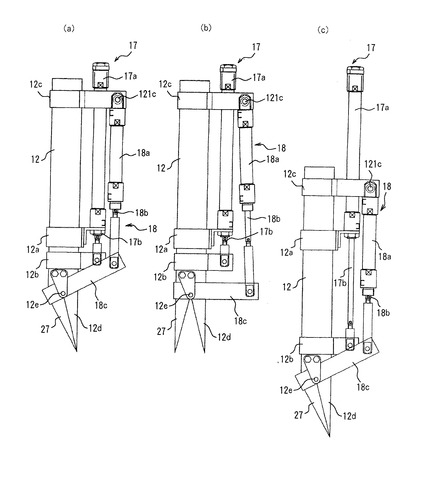
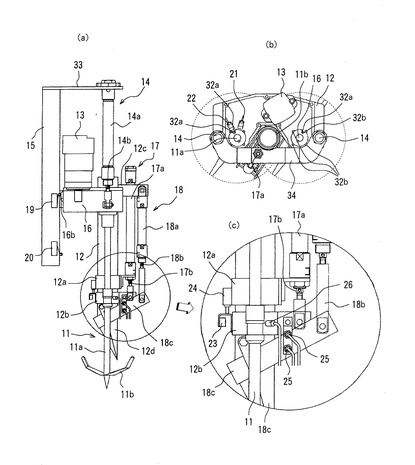
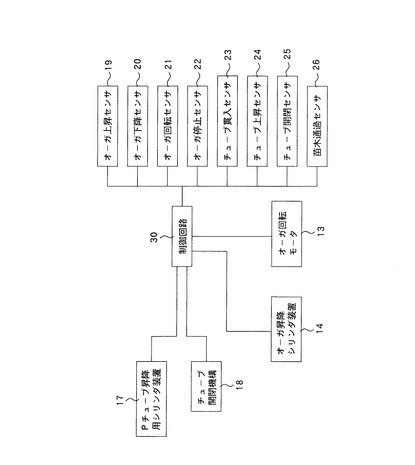
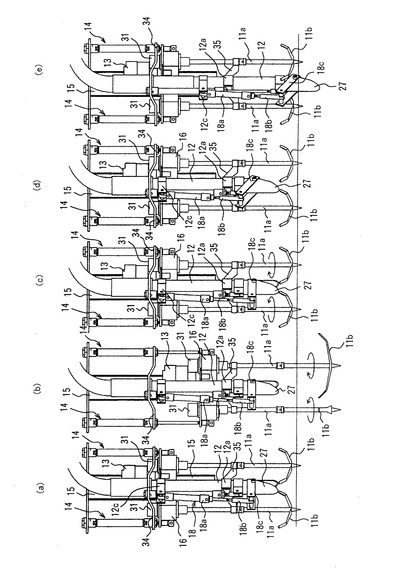
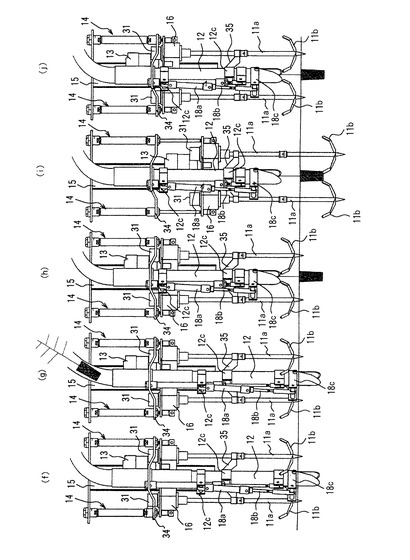
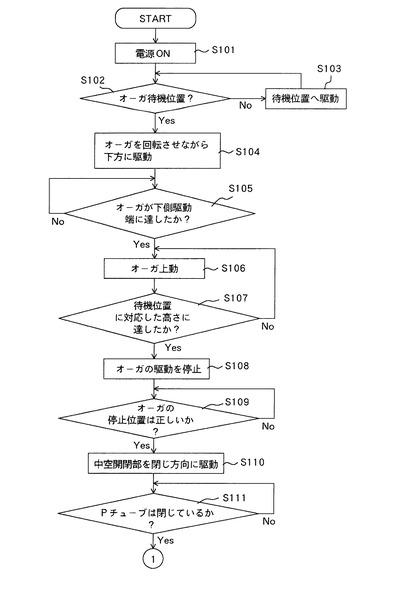
図1は自動耕耘植付機を示し、(a)は側面図、(b)は正面図、(c)は背面図、(d)は(b)のA−A矢視図、(e)は上面視透視図である。図2は図1に示すギアボックスの上面カバープレートを取り外した状態でギア列を示す上面図である。図3はプランティングチューブの側面図を示し、(a)は先端開口部が閉じて尖った状態、(b)は該先端開口部が開いた状態、(c)はプランティングチューブを降下させて植穴内に突き刺す状態を図示している。図4は自動耕耘植付機の構造図であり、(a)は側面図、(b)は上面図であり、(c)は(a)の円で囲んだ部分を拡大した拡大図である。図5は、本実施例の自動耕耘植付機の機能ブロック図であり、図6は、本実施例の自動耕耘植付機の動作説明図であり、図7は本実施例の自動耕耘植付機の動作制御を示したフローチャートであり、このフローチャートに示す動作制御は図5に示す制御回路30によって実行される。図8は、待機位置に待機しているときのオーガ11の軸方向配置図である。
【0022】
図1において、本実施の形態の自動耕耘植付機は、不図示のバックホウのアーム先端部に取り付けられる固定フレーム部Fと、固定フレーム部Fに対して昇降方向にガイドされるギアボックス16を備えたオーガ部Oと、オーガ部Oを固定フレーム部Fに対して昇降駆動する左右一対のオーガ昇降シリンダ装置14と、左右一対のオーガ昇降シリンダ装置14の各シリンダ14a、14a間に差し渡されるようにして固定されたプランティングチューブ(以下Pチューブと略す)12をPチューブ昇降用シリンダ装置17を介して吊持ち支持する取り付けブラケット34と、を有している。ギアボックス16からは上下方向に延びる一対のオーガ軸11bがPチューブ12の両側に位置するように配置され、各オーガ軸11bの下端にカッターバーが固定されている。
【0023】
固定フレーム部Fは、水平方向に延びる上部取り付け板33の背面側に上下方向に延びるガイドプレート15を取り付けた構造で、上部取り付け板33にオーガ昇降シリンダ装置14の各シリンダ14aが固定され、これら一対のオーガ昇降シリンダ装置14のロッド部材14bの下端にギアボックス16が固定されている。
【0024】
したがって、一対のオーガ昇降シリンダ装置14を駆動してロッド部材14bを下方に移動させると、ギアボックス16が降下する。その際、取り付けブラケット34はオーガ昇降シリンダ装置14のシリンダ14aに固定されているので、この取り付けブラケット34に吊り持ち支持されているPチューブ12は降下することはない。
【0025】
オーガ部Oは、上下方向に延びるオーガ軸11aの下端に、両端部が上方に折れ曲ると共に該オーガ軸を中心として互いに逆向きに捩じれた翼形に形成された略一文字のカッターバー11bが固定され、オーガ軸11aの上端は、ギアボックス16を貫通して、ギアボックス16の上面から延出しており、オーガ軸11aはギアボックス16に回転可能に支持された構成となっている。また、ギアボックス16の上面には、オーガ回転モータ13が固定されており、このオーガ回転モータ13の出力軸は、ギアボックス16の中に延出している。ギアボックス16の中には、オーガ回転モータ13の駆動力をオーガ軸11aに伝達するための伝達機構が設けられている。
【0026】
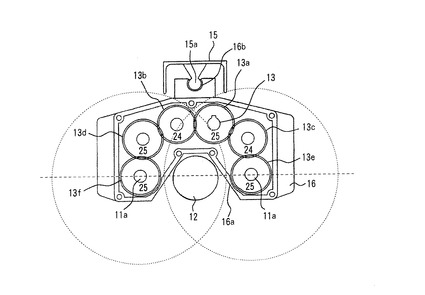
この伝達機構は、図2に示すように、オーガ回転モータ13の出力軸に設けられた出力ギア13aと、この出力ギア13aに噛み合う第1の伝達ギア13b、13cと、この第1の伝達ギア13bに噛み合う第2の伝達ギア13dと、この第2の伝達ギア13dに噛み合う一方のオーガ軸11aに設けられたオーガ駆動ギア13fと、第1の伝達ギア13cに噛み合う他方のオーガ軸11bに設けられたオーガ駆動ギア13eとから構成される。なお、図2の数字は、各ギアの歯数を示している。
【0027】
このように、一対のオーガにオーガ回転モータ13の駆動力を伝達する伝達ギアの数を、各オーガに応じて一段異ならせることにより、一対のオーガは、それぞれ反対方向に回転する。
【0028】
オーガ11の上端部には、オーガ11と一体となって回転する回転板32が固定されており、この回転板32の縁には、切欠部32aが形成されており、この回転板32の隣接した位置には、オーガ回転センサ21及びオーガ停止センサ22が設けられている。
【0029】
オーガ回転センサ21は、発光素子と受光素子とを有しており、発光素子から常時発せられて、回転板32に入射した光のうち、切欠部32a以外の部分に入射した光は、受光素子にて受光され、切欠部32aで反射された光は、受光素子で受光されないようになっている。そして、この切欠部32aにおける光の不検出をカウントすることにより、オーガ11の回転速度を検出することができる。
【0030】
また、オーガ停止センサ22も、オーガ回転センサ21と同様の構成になっており、切欠部32aにおける光の不検出によって、オーガ待機位置に停止したことを検出できるようになっている。
【0031】
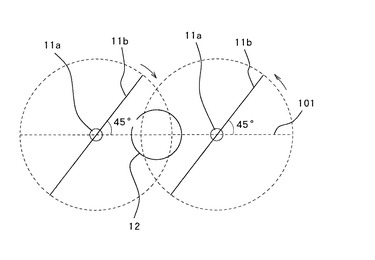
ここで、オーガ待機位置とは、図8に示すように、一対のオーガ回転軸11aを結ぶ線に対して、各回転軸11aの下端に固定されたカッターバー11bが約45°の角度を成した状態を意味している。
【0032】
また、ギアボックス16には、上下方向に延びるガイド溝部16bが設けられており、このガイド溝部16bに対して、ガイドプレート15に設けられたガイド突起部15aが係合している。
【0033】
オーガ昇降シリンダ装置14は、シリンダ14aとこのシリンダ14aに対して進退可能なロッド部材14bとを有して構成されており、シリンダ14aの上端部は上部取り付け板33を介してフレーム15に固定されており、下端部はブラケット34に固定されており、ロッド部材14bの先端部は、ギアボックス16の側面に取り付けられている。
【0034】
したがって、オーガ昇降シリンダ装置14を駆動して、そのロッド部材14bを固定状態にあるシリンダ14aに対して伸長及び短縮させることにより、ギアボックス16及びオーガ11を一体として上下方向に駆動することができる。
【0035】
フレーム15には、オーガ11の上下方向の駆動範囲を制限するための、オーガ上昇センサ19及びオーガ下降センサ20が設けられている。オーガ11とともに上下方向に動くギアボックス16に設けられた凸部16bにオーガ上昇(下降)センサ19(20)のスイッチ切片が乗り上げると、駆動端に達したことを示す駆動停止信号が各センサ19、20から出力され、オーガ昇降シリンダ装置14による駆動が停止される。
【0036】
ブラケット34によってPチューブ昇降用シリンダ装置17を介して吊り持ち支持されるPチューブ12は、ギアボックス16の切り欠き部16aを通って、昇降方向に延びており、一対のオーガ軸11a及びPチューブ12は、オーガ軸直交方向において並設されている。このように、ギアボックス16に切り欠き部16aを設けて、一対のオーガ軸11a及びPチューブ12をオーガ軸直交方向に一直線上に配置することにより、平面視8の字状に形成される植穴の中央にPチューブ12から排出される苗木を投入することができる。これにより、苗木の植付部分の周辺において雑草の繁殖を抑えることができ、苗木が育ちやすい環境を整備することができる。
【0037】
Pチューブ昇降用シリンダ装置17は、シリンダ17aとこのシリンダ17aに対して進退可能なロッド部材17bとを有して構成されており、シリンダ17aの上部は、図4(b)に図示するように、ブラケット34に対して固定されており、下部はPチューブ12の外周面に上下方向に移動可能に係合しているガイドリング12a(図3参照)に固定されている。図1に示すように、このガイドリング12aには、ガイド腕部35が設けられており、このガイド腕部35は、オーガ11のオーガ軸11aに対して上下方向に移動可能に係合している。
【0038】
ロッド部材17bの先端部は、Pチューブ12に固定された固定リング12bに取り付けられている。上述の構成によれば、ロッド部材17bを伸長及び短縮させることにより、Pチューブ12を固定状態にあるシリンダ17aに対して、ガイドリング12aにガイドさせながら昇降させることができる。
【0039】
また、このガイドリング12aから延びるガイド腕部35を、オーガ軸11aに係合させることにより、ガイドリング12aの姿勢が安定するため、Pチューブ12をガイドリング12aによって確実にガイドすることができる。
【0040】
Pチューブ12の先端部には、円錐を二分割した半円錐形状の中空開口部12dが形成されており、この中空開口部12dに対して、中空開口部12dと略同形状に構成された中空開閉部27を開閉させることにより、中空開口部12dの開閉状態を切り替えることができるようになっている。
【0041】
中空開閉部27を開閉駆動するチューブ開閉機構18は、Pチューブ12に固定されたPチューブ12の径方向外側に延びる固定リング12cの先端部に設けられたシリンダ回転軸121cに回転可能な状態で吊り持ち支持される開閉シリンダ18aと、この開閉シリンダ18aに対して進退可能なロッド部材18bと、ロッド部材18bの先端部に回動可能に取り付けられた腕部材18cとを有しており、この腕部材18cは、Pチューブ12に設けられた腕部材回転軸12eに回転可能に支持され、腕部材18cの先端部には、中空開閉部27が固定されている。
【0042】
図3(a)に図示するように、ロッド部材18bが開閉シリンダ18aに対して短縮状態にあるとき、開閉シリンダ18aは上下方向に延びており、腕部材18cは水平方向に対して右上方に傾いた姿勢となっており、中空開閉部27は中空開口部12dを閉じた状態となっている。
【0043】
この図3(a)に図示する状態において、ロッド部材18bを伸長すると、図3(b)に図示するように、開閉シリンダ18aがシリンダ回転軸121cを回転軸として、時計周り反対方向に少しだけ回転するとともに、右斜め上方に傾いた状態にある腕部材18cが、水平姿勢となる位置まで腕部材回転軸12eを回転軸として時計回り方向に回転し、その結果、中空開閉部27が開方向に駆動されて開き状態となる。
【0044】
Pチューブ12に固定された固定リング12bには、光電スイッチ式のチューブ貫入センサ23が設けられており、このチューブ貫入センサ23は、待機位置に位置するPチューブ12が、堀削土に所定量進入した苗木投入位置まで下降しときにオンするようになっており、このチューブ貫入センサ23がオンすることにより、Pチューブ昇降用シリンダ装置17の駆動が停止されるとともに、チューブ開閉機構18を構成するロッド部材18bが伸長方向に駆動されて、中空開閉部27が開き状態となる。
【0045】
さらに、この固定リング12bには、チューブ開閉センサ25及び苗木通過センサ26が取り付けられており、チューブ開閉センサ25によって、中空開閉部27の開閉状態が検出され、苗木通過センサ26によって、Pチューブ12の後端開口部から送り込まれた苗木が中空開口部12dから排出されたことを検出できるようになっている。
【0046】
また、ガイドリング12aには、リミットスイッチ式のPチューブ上昇センサ24が設けられており、このPチューブ上昇センサ24は、苗木投入位置において苗木投入を完了したPチューブ12が、チューブ待機位置まで上昇したときにオンするようになっている。このPチューブ上昇センサ24がオンすると、Pチューブ昇降用シリンダ装置17によるPチューブ12の駆動が停止され、Pチューブ12は、チューブ待機位置に停止する。
【0047】
次に、図5、図6、図7及び図8を参照して、本実施例の自動耕耘植付機の動作について説明する。
【0048】
まず、初期状態において、オーガ昇降シリンダ装置14及びPチューブ昇降用シリンダ装置17は、短縮状態にあり、オーガ11及びPチューブ12は、それぞれ植林地上方のオーガ待機位置及びチューブ待機位置で待機している(図6(a)参照)。
【0049】
ここで、オーガ待機位置とは、図8に示すように、オーガ軸11aに設けられた一対のカッターバー11bが、一対のオーガ軸11aを結ぶ点線101に対して45°の角度をなした状態を意味している。また、チューブ待機位置で待機しているPチューブ12は、一対のカッターバー11bよりも上方に位置しており、Pチューブ12の先端開口部12dは、開き状態に設定されている。
【0050】
なお、電源投入時において(ステップS101)、オーガ11及びPチューブ12が、各待機位置よりも下方に位置している場合は(ステップS102)、オーガ昇降シリンダ装置14及びPチューブ昇降用シリンダ装置17を短縮方向に駆動して、各待機位置に戻す(ステップS103)。
【0051】
オーガ11がオーガ待機位置に待機している状態で、自動耕耘植付機に耕耘及び植付動作を指示する自動耕耘植付機駆動スイッチをオンすると、オーガ回転モータ13の駆動力が伝達ギア13b〜13eを介して伝達され、各オーガ11は、互いに反対方向に回転し、それぞれ所定方向に回転動作を開始する。また、この時、オーガ昇降シリンダ装置14のロッド部材14bを下方に駆動することにより、オーガ軸11aがガイド腕部35にガイドされた状態で、ギアボックス16及びオーガ11は、一体となって下方に移動する(ステップS104)。
【0052】
そして、一対のオーガ11が植林地の地面に達すると、図2に点線で示すように、回転しながら下降するカッターバー11bの堀削作用により、平面視8の字状の植穴が形成されるとともに、苗木の植付部分の周辺に生えている雑草が根こそぎ断ち切られる(図6(b)参照)。なお、雑草が根こそぎ断ち切られた状態において、植穴には堀削土が軟らかな状態で残っている。
【0053】
オーガ11が植穴を形成しながら所定量下降し、下側の駆動端に達したことを示す信号がオーガ下降センサ20から出力される(ステップS105)と、オーガ昇降シリンダ装置14のロッド部材14bを短縮方向に駆動して、植穴内に位置するオーガ11を上方へ退避させる(図6(c)参照、ステップS106)。なお、この退避動作の際、オーガ回転モータ13の駆動は維持されているため、オーガ11は、回転しながら上方に退避する。
【0054】
植穴内から退避したオーガ11がオーガ待機位置に対応する高さにまで上昇したことを、オーガ上昇センサ19が検知すると(ステップS107)、オーガ昇降シリンダ装置14及びオーガ回転モータ13の駆動を停止する(ステップS108)。なお、オーガ回転モータ13を停止した後、オーガ11は、慣性力により回転動作を継続する。したがって、オーガ11を図8に示すオーガ待機位置に停止させるためには、オーガ回転モータ13停止後の慣性力による回転量をも考慮して、オーガ回転モータ13の停止タイミングを制御する。
【0055】
そして、オーガ停止センサ22により、オーガ11がオーガ待機位置に停止したことが検知された場合(ステップS109)、チューブ開閉機構18のロッド部材18bを短縮方向に駆動して、中空開閉部27を閉じ方向に駆動する(ステップS110)。
【0056】
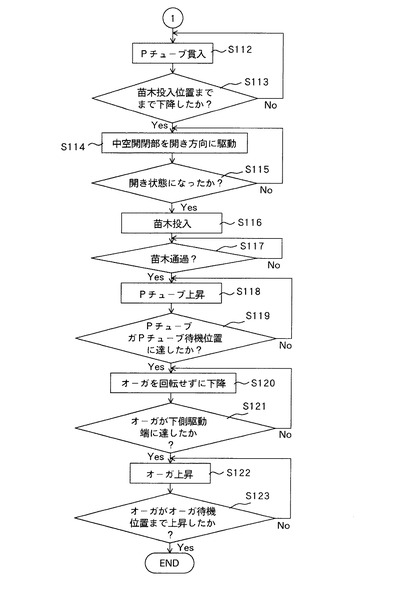
中空開閉部27が閉じ方向に駆動され、チューブ開閉センサ25からの出力信号によって、Pチューブ12の中空開口部12dが閉じ状態にあると判定された場合(ステップS111、図6(d)参照)、Pチューブ昇降用シリンダ装置17を駆動して、チューブ待機位置に待機しているPチューブ12を下降させる(ステップS112、図6(e)参照)。このとき、オーガ11の下端部に設けられた各カッターバー11bは、図8に示すように、オーガ待機位置、すなわち、点線101に対して45°の角度を成した状態で停止しており、この状態でPチューブ昇降用シリンダ装置17を駆動することにより、Pチューブ12を一対のカッターバー11bに干渉させることなく、下降させることができる。
【0057】
こうして、植穴に柔らかな状態で残っている堀削土に、中空開口部12dを閉じて、先端尖り状態にあるPチューブ12が所定量突き刺さると、チューブ貫入センサ23から苗木投入位置に達したことを示す信号が出力され(ステップS113)、Pチューブ昇降用シリンダ装置17によるPチューブ12の下降動作が停止される。Pチューブ12が下降動作を停止した状態で、開閉シリンダ18aを伸長方向に駆動すると、これに応じて開き方向に駆動される中空開閉部27によって、堀削土が押し広げられ、苗木の植付空間が確保される(ステップS114)。
【0058】
チューブ開閉センサ25から中空開口部12dが開き状態に設定されたことを示す信号が出力されると(ステップS115)、Pチューブ12の後端開口部から圧縮空気によって苗木が送り込まれ、この苗木は、重力落下により中空開閉部27によって押し広げられた植付空間に投入される(ステップS116、図6(g)参照)。
【0059】
苗木がPチューブ12を通って植付空間に排出されたことを、苗木通過センサ26が検知すると(ステップS117)、Pチューブ昇降用シリンダ装置17を短縮方向に駆動して、植付空間に位置するPチューブ12を上方へ退避させる(ステップS118、図6(h)参照)。
【0060】
この上方に退避したPチューブ12がチューブ待機位置まで上昇したことを、チューブ上昇センサ24が検知すると(ステップS119)、オーガ昇降シリンダ装置14を伸長方向に駆動して、オーガ待機位置にて待機している一対のオーガ11をオーガ軸11a周りに回転させることなく、下降させる(ステップS120)。
【0061】
オーガ11が下降すると、植穴内に柔らかな状態で残っている堀削土に一対のカッターバー11bが押圧され、展圧される(図6(i)参照)。オーガ11が下側駆動端に達したことが検知された場合(ステップS121)、オーガ昇降シリンダ装置14のロッド部材14bを短縮方向に駆動して、オーガ11を上昇させ(ステップS122)、オーガ待機位置にて(ステップS123)停止させる。
【0062】
このように、本実施例の自動耕耘植付機によれば、オーガ11を回転させながら下降させるだけで、植穴を形成しながら、苗木周辺の雑草を根こそぎ排除することができる。これにより、作業負担が軽減され、少ない労力で雑草排除と苗木の植付作業を連続的に行うことができる。
【図面の簡単な説明】
【0063】
【図1】自動植付き機の全体構成図
【図2】ギアボックスの断面図
【図3】Pチューブの動作説明図
【図4】センサの配置図
【図5】自動耕耘植付機の機能ブロック図
【図6a】自動耕耘植付機の動作説明図
【図6b】自動耕耘植付機の動作説明図
【図7a】自動耕耘植付機の動作制御を示したフローチャート
【図7b】自動耕耘植付機の動作制御を示したフローチャート
【図8】Pチューブを下方に駆動するときの、オーガの配置図
【符号の説明】
【0064】
11 オーガ
12 Pチューブ
13 オーガ駆動モータ
14 オーガ昇降シリンダ
15 フレーム
16 ギアボックス
17 チューブ駆動シリンダ
18 チューブ開閉機構
19 オーガ上昇センサ
20 オーガ下降センサ
21 オーガ回転センサ
22 オーガ停止センサ
23 チューブ貫入センサ
24 チューブ上昇センサ
25 チューブ開閉センサ
26 苗木通過センサ
30 制御回路
32 回転板
33 上部取り付け板
34 ブラケット
35 ガイド腕部
【背景技術】
【0001】
近年、環境保護などの観点から、植林地に苗木を人工的に植える植林が行われるようになっている。この植林作業は、植林地に多数の植穴を掘削し、この植穴に苗木を投入した後、植穴を埋め戻し、展圧するという動作を繰り返し行うことにより、多数の苗木を植林していく。
【0002】
これらの作業を、手作業で行うと、作業者の肉体的な負担が大きくなるため、植穴の掘削〜展圧までの作業を自動化した、自動耕耘植付機が提案されている(例えば、特許文献1参照)。
【0003】
この特許文献1に開示された自動耕耘植付機は、空気コンベアから出力される空気圧によって苗木を植穴に案内する案内筒を有しており、この案内筒の先端には、植林地に植穴を掘削するための中空オーガが設けられている。
【0004】
この中空オーガは、ねじ羽根が周設された逆円錐状の周壁を中心線方向に二分割したオーガであり、この二分割された中空オーガの周壁の半円形の上端縁中央部は、それぞれ、苗木案内筒の下端部に揺動自在に取り付けられている。
【0005】
苗木の植付作業を行うときには、苗木案内筒をその中心軸周りに回転させながら、下方に駆動する。このとき、二分割された中空オーガは、閉じ状態にあり、苗木案内筒と一体となって、回転しながら下方に移動するため、植林地の地面がオーガによって掘削され、植穴が形成される。植穴を切削した後は、中空オーガを開き方向に駆動して、苗木案内筒の開口端を開放し、空気コンベアから出力される空気圧により苗木を植穴に送り込む。そして、苗木を送り込んだ後は、展圧板によって植穴を埋め戻し、展圧する。
【特許文献1】特開平9−201136号公報(第6図など)
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、植林した苗木の周りにこの苗木よりも大きな雑草が生えている場合、雑草により日光が遮断されるため、苗木の成長が妨げられるおそれがある。このため、特許文献1に記載の自動耕耘植付機によって植林する場合には、あらかじめ植林地の雑草を刈り、苗木に日光が当たりやすい環境を整えておく必要がある。
【0007】
しかしながら、この自動苗木植付装置には、雑草を排除する機能が組み込まれていないため、植林の前作業として、雑草を根こそぎ排除する耕耘作業を行う必要があり、多大な労力を必要としていた。
【0008】
そこで、本願発明は、植林作業前の耕耘作業及び植林作業を、連続的に行うことが可能な自動耕耘植付機を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本願発明に係る自走式移動装置のアーム部に取り付けられて使用される自動耕耘植付機であって、前記アーム部に固定される固定フレーム部と、前記固定フレーム部に対して昇降可能な植穴を掘削する一対のカッターバー付きオーガを回転可能に備えたオーガ部と、前記固定フレームに対し前記オーガ部とは独立に昇降可能で、下端開口部に開閉可能な開閉手段を有する前記植穴に苗木を投入するためのプランティングチューブとを有することを特徴とする。
【0010】
ここで、オーガ部を昇降させる第1の駆動手段と、前記一対のカッターバー付きオーガを回転させる第2の駆動手段と、前記プランティングチューブを昇降させる第3の駆動手段と、前記開閉手段を駆動する第4の駆動手段と、前記第1、第2、第3及び第4の駆動手段の駆動を制御する制御手段とを設け、前記制御手段に、プランティングチューブとの干渉を避けるオーガ待機位置に位置する前記オーガ部を回転させながら下方に移動させ、植林地下の堀削位置まで掘削する第1の動作と、前記堀削位置まで掘削した後、前記オーガ部を前記オーガ待機位置まで回転させながら上昇させて、停止する第2の動作と、該第2の動作によって前記オーガ部が前記オーガ待機位置に停止している状態において、前記オーガ待機位置よりも上方に位置する前記オーガ部との干渉を避けるプランティングチューブ待機位置にて待機している前記プランティングチューブを、堀削土中の苗木投入位置まで下降させる第3の動作と、前記苗木投入位置に前記プランティングチューブが位置する状態で、前記開閉手段を開き方向に駆動して、前記堀削土中に植付空間を形成する第4の動作と、該第4の動作によって形成された前記植付空間に、苗木が投入された後、前記プランティングチューブを前記プランティングチューブ待機位置まで上昇させる第5の動作と、該第5の動作が終了した後に、前記オーガ部を下降させ、前記カッターバーを前記堀削土に押し付けることにより、展圧する第6の動作とが行われるように前記第1、第2、第3及び第4の駆動手段を制御させるとよい。
【0011】
また、前記プランティングチューブは、前記一対のカッターバー付きオーガの間に配置すると良い。
【0012】
また、前記オーガ部に、前記第2の駆動手段を収容するボックスを設け、前記ボックスに、前記プランティングチューブに対して退避した退避形状部を形成すると良い。
さらに、前記第2の動作において、前記オーガ部を前記オーガ待機位置に停止さ
せるとき、前記制御手段を用いて、前記第一対のカッターバーが、前記一対のカッターバー付きオーガの各軸を結ぶ直線に対して、略45度の角度で停止するように、前記第2の駆動手段を制御するとよい。
【発明の効果】
【0013】
本願発明によれば、一対のカッターバー付きオーガを回転させながら下降させることにより、植穴を形成するとともに植穴周辺の雑草を根こそぎ排除することができ、また、プランティングチューブを、オーガ部に対して独立して下降させることにより、植穴に苗木を投入することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を図面に示す実施例を参照しながら説明する。
【実施例1】
【0015】
本発明による自動耕耘植付機は、例えば自走式の土木或いは建設用機器の一つであるバックホウ(ユンボ)等の可動アームの先端部に取り付けられて使用されるもので、該バックホウの可動アームを操作して自動耕耘植付機を苗の植付地面から上方の所定高さ位置に垂直姿勢に保持され、該バックホウの運転席からの操作により動作する。本実施例の自動耕耘植付機の駆動源は油圧を用いており、この油圧源は例えばバックホウに装備される油圧源を利用している。
【0016】
本実施例による自動耕耘植付機の概略構成は、バックホウのアーム部材の先端に固定される固定フレーム部と、前記固定フレーム部に対して昇降可能な植穴を略平面視8の字状に堀削する一対のオーガを回転可能に備えたオーガ部と、前記固定フレームに対し前記オーガ部とは独立に昇降可能で、前記植穴に苗木を投入するためのプランティングチューブとを備えている。
【0017】
一対のオーガは、中央に配したプランティングチューブの左右両側に配置され、上下方向に延びるオーガ軸の下端に、両端部が上方に折れ曲ると共に該オーガ軸を中心として互いに逆向きに捩じれた翼形に形成された略一文字のカッターバーが固定された構成としている。各オーガは、互いに反対方向に回転し、それぞれ所定方向に回転することにより、一対のカッターバーが地面を平面視略8の字形に掘り進み、植穴を掘る。その際、前記植穴にはカッターバーによる堀削土が柔らかな状態で残っており、そこに下端部が尖って閉塞状態のプランティングチューブを突き刺し、該閉塞状態の下端部を拡開すると堀削土が押し広げられて苗木の植付空間が確保される。
【0018】
そして、プランティングチューブに苗木を送り込むと、苗木は重力落下により該植穴の植付空間に投入される。その後にプランティングチューブを引き上げると、苗木の回りを堀削土が埋めるがこれだけでは苗木をしっかりと植付できないので、一対のオーガを降下させてカッターバーにより苗木の周りの土を展圧するようにしている。
【0019】
本実施の形態では、一対のオーガで植穴を平面視略8の字形状に形成することで、苗木の植付部分の両側を大きくカッターバーで堀削することになり、その際雑草を根こそぎ断ち切ってしまい、苗木の植付部分の周辺において雑草の繁殖を抑えることができる。
【0020】
以下、本実施の形態の自動耕耘植付機の詳細な構成を図1〜図8に基づいて説明する。
【0021】
図1は自動耕耘植付機を示し、(a)は側面図、(b)は正面図、(c)は背面図、(d)は(b)のA−A矢視図、(e)は上面視透視図である。図2は図1に示すギアボックスの上面カバープレートを取り外した状態でギア列を示す上面図である。図3はプランティングチューブの側面図を示し、(a)は先端開口部が閉じて尖った状態、(b)は該先端開口部が開いた状態、(c)はプランティングチューブを降下させて植穴内に突き刺す状態を図示している。図4は自動耕耘植付機の構造図であり、(a)は側面図、(b)は上面図であり、(c)は(a)の円で囲んだ部分を拡大した拡大図である。図5は、本実施例の自動耕耘植付機の機能ブロック図であり、図6は、本実施例の自動耕耘植付機の動作説明図であり、図7は本実施例の自動耕耘植付機の動作制御を示したフローチャートであり、このフローチャートに示す動作制御は図5に示す制御回路30によって実行される。図8は、待機位置に待機しているときのオーガ11の軸方向配置図である。
【0022】
図1において、本実施の形態の自動耕耘植付機は、不図示のバックホウのアーム先端部に取り付けられる固定フレーム部Fと、固定フレーム部Fに対して昇降方向にガイドされるギアボックス16を備えたオーガ部Oと、オーガ部Oを固定フレーム部Fに対して昇降駆動する左右一対のオーガ昇降シリンダ装置14と、左右一対のオーガ昇降シリンダ装置14の各シリンダ14a、14a間に差し渡されるようにして固定されたプランティングチューブ(以下Pチューブと略す)12をPチューブ昇降用シリンダ装置17を介して吊持ち支持する取り付けブラケット34と、を有している。ギアボックス16からは上下方向に延びる一対のオーガ軸11bがPチューブ12の両側に位置するように配置され、各オーガ軸11bの下端にカッターバーが固定されている。
【0023】
固定フレーム部Fは、水平方向に延びる上部取り付け板33の背面側に上下方向に延びるガイドプレート15を取り付けた構造で、上部取り付け板33にオーガ昇降シリンダ装置14の各シリンダ14aが固定され、これら一対のオーガ昇降シリンダ装置14のロッド部材14bの下端にギアボックス16が固定されている。
【0024】
したがって、一対のオーガ昇降シリンダ装置14を駆動してロッド部材14bを下方に移動させると、ギアボックス16が降下する。その際、取り付けブラケット34はオーガ昇降シリンダ装置14のシリンダ14aに固定されているので、この取り付けブラケット34に吊り持ち支持されているPチューブ12は降下することはない。
【0025】
オーガ部Oは、上下方向に延びるオーガ軸11aの下端に、両端部が上方に折れ曲ると共に該オーガ軸を中心として互いに逆向きに捩じれた翼形に形成された略一文字のカッターバー11bが固定され、オーガ軸11aの上端は、ギアボックス16を貫通して、ギアボックス16の上面から延出しており、オーガ軸11aはギアボックス16に回転可能に支持された構成となっている。また、ギアボックス16の上面には、オーガ回転モータ13が固定されており、このオーガ回転モータ13の出力軸は、ギアボックス16の中に延出している。ギアボックス16の中には、オーガ回転モータ13の駆動力をオーガ軸11aに伝達するための伝達機構が設けられている。
【0026】
この伝達機構は、図2に示すように、オーガ回転モータ13の出力軸に設けられた出力ギア13aと、この出力ギア13aに噛み合う第1の伝達ギア13b、13cと、この第1の伝達ギア13bに噛み合う第2の伝達ギア13dと、この第2の伝達ギア13dに噛み合う一方のオーガ軸11aに設けられたオーガ駆動ギア13fと、第1の伝達ギア13cに噛み合う他方のオーガ軸11bに設けられたオーガ駆動ギア13eとから構成される。なお、図2の数字は、各ギアの歯数を示している。
【0027】
このように、一対のオーガにオーガ回転モータ13の駆動力を伝達する伝達ギアの数を、各オーガに応じて一段異ならせることにより、一対のオーガは、それぞれ反対方向に回転する。
【0028】
オーガ11の上端部には、オーガ11と一体となって回転する回転板32が固定されており、この回転板32の縁には、切欠部32aが形成されており、この回転板32の隣接した位置には、オーガ回転センサ21及びオーガ停止センサ22が設けられている。
【0029】
オーガ回転センサ21は、発光素子と受光素子とを有しており、発光素子から常時発せられて、回転板32に入射した光のうち、切欠部32a以外の部分に入射した光は、受光素子にて受光され、切欠部32aで反射された光は、受光素子で受光されないようになっている。そして、この切欠部32aにおける光の不検出をカウントすることにより、オーガ11の回転速度を検出することができる。
【0030】
また、オーガ停止センサ22も、オーガ回転センサ21と同様の構成になっており、切欠部32aにおける光の不検出によって、オーガ待機位置に停止したことを検出できるようになっている。
【0031】
ここで、オーガ待機位置とは、図8に示すように、一対のオーガ回転軸11aを結ぶ線に対して、各回転軸11aの下端に固定されたカッターバー11bが約45°の角度を成した状態を意味している。
【0032】
また、ギアボックス16には、上下方向に延びるガイド溝部16bが設けられており、このガイド溝部16bに対して、ガイドプレート15に設けられたガイド突起部15aが係合している。
【0033】
オーガ昇降シリンダ装置14は、シリンダ14aとこのシリンダ14aに対して進退可能なロッド部材14bとを有して構成されており、シリンダ14aの上端部は上部取り付け板33を介してフレーム15に固定されており、下端部はブラケット34に固定されており、ロッド部材14bの先端部は、ギアボックス16の側面に取り付けられている。
【0034】
したがって、オーガ昇降シリンダ装置14を駆動して、そのロッド部材14bを固定状態にあるシリンダ14aに対して伸長及び短縮させることにより、ギアボックス16及びオーガ11を一体として上下方向に駆動することができる。
【0035】
フレーム15には、オーガ11の上下方向の駆動範囲を制限するための、オーガ上昇センサ19及びオーガ下降センサ20が設けられている。オーガ11とともに上下方向に動くギアボックス16に設けられた凸部16bにオーガ上昇(下降)センサ19(20)のスイッチ切片が乗り上げると、駆動端に達したことを示す駆動停止信号が各センサ19、20から出力され、オーガ昇降シリンダ装置14による駆動が停止される。
【0036】
ブラケット34によってPチューブ昇降用シリンダ装置17を介して吊り持ち支持されるPチューブ12は、ギアボックス16の切り欠き部16aを通って、昇降方向に延びており、一対のオーガ軸11a及びPチューブ12は、オーガ軸直交方向において並設されている。このように、ギアボックス16に切り欠き部16aを設けて、一対のオーガ軸11a及びPチューブ12をオーガ軸直交方向に一直線上に配置することにより、平面視8の字状に形成される植穴の中央にPチューブ12から排出される苗木を投入することができる。これにより、苗木の植付部分の周辺において雑草の繁殖を抑えることができ、苗木が育ちやすい環境を整備することができる。
【0037】
Pチューブ昇降用シリンダ装置17は、シリンダ17aとこのシリンダ17aに対して進退可能なロッド部材17bとを有して構成されており、シリンダ17aの上部は、図4(b)に図示するように、ブラケット34に対して固定されており、下部はPチューブ12の外周面に上下方向に移動可能に係合しているガイドリング12a(図3参照)に固定されている。図1に示すように、このガイドリング12aには、ガイド腕部35が設けられており、このガイド腕部35は、オーガ11のオーガ軸11aに対して上下方向に移動可能に係合している。
【0038】
ロッド部材17bの先端部は、Pチューブ12に固定された固定リング12bに取り付けられている。上述の構成によれば、ロッド部材17bを伸長及び短縮させることにより、Pチューブ12を固定状態にあるシリンダ17aに対して、ガイドリング12aにガイドさせながら昇降させることができる。
【0039】
また、このガイドリング12aから延びるガイド腕部35を、オーガ軸11aに係合させることにより、ガイドリング12aの姿勢が安定するため、Pチューブ12をガイドリング12aによって確実にガイドすることができる。
【0040】
Pチューブ12の先端部には、円錐を二分割した半円錐形状の中空開口部12dが形成されており、この中空開口部12dに対して、中空開口部12dと略同形状に構成された中空開閉部27を開閉させることにより、中空開口部12dの開閉状態を切り替えることができるようになっている。
【0041】
中空開閉部27を開閉駆動するチューブ開閉機構18は、Pチューブ12に固定されたPチューブ12の径方向外側に延びる固定リング12cの先端部に設けられたシリンダ回転軸121cに回転可能な状態で吊り持ち支持される開閉シリンダ18aと、この開閉シリンダ18aに対して進退可能なロッド部材18bと、ロッド部材18bの先端部に回動可能に取り付けられた腕部材18cとを有しており、この腕部材18cは、Pチューブ12に設けられた腕部材回転軸12eに回転可能に支持され、腕部材18cの先端部には、中空開閉部27が固定されている。
【0042】
図3(a)に図示するように、ロッド部材18bが開閉シリンダ18aに対して短縮状態にあるとき、開閉シリンダ18aは上下方向に延びており、腕部材18cは水平方向に対して右上方に傾いた姿勢となっており、中空開閉部27は中空開口部12dを閉じた状態となっている。
【0043】
この図3(a)に図示する状態において、ロッド部材18bを伸長すると、図3(b)に図示するように、開閉シリンダ18aがシリンダ回転軸121cを回転軸として、時計周り反対方向に少しだけ回転するとともに、右斜め上方に傾いた状態にある腕部材18cが、水平姿勢となる位置まで腕部材回転軸12eを回転軸として時計回り方向に回転し、その結果、中空開閉部27が開方向に駆動されて開き状態となる。
【0044】
Pチューブ12に固定された固定リング12bには、光電スイッチ式のチューブ貫入センサ23が設けられており、このチューブ貫入センサ23は、待機位置に位置するPチューブ12が、堀削土に所定量進入した苗木投入位置まで下降しときにオンするようになっており、このチューブ貫入センサ23がオンすることにより、Pチューブ昇降用シリンダ装置17の駆動が停止されるとともに、チューブ開閉機構18を構成するロッド部材18bが伸長方向に駆動されて、中空開閉部27が開き状態となる。
【0045】
さらに、この固定リング12bには、チューブ開閉センサ25及び苗木通過センサ26が取り付けられており、チューブ開閉センサ25によって、中空開閉部27の開閉状態が検出され、苗木通過センサ26によって、Pチューブ12の後端開口部から送り込まれた苗木が中空開口部12dから排出されたことを検出できるようになっている。
【0046】
また、ガイドリング12aには、リミットスイッチ式のPチューブ上昇センサ24が設けられており、このPチューブ上昇センサ24は、苗木投入位置において苗木投入を完了したPチューブ12が、チューブ待機位置まで上昇したときにオンするようになっている。このPチューブ上昇センサ24がオンすると、Pチューブ昇降用シリンダ装置17によるPチューブ12の駆動が停止され、Pチューブ12は、チューブ待機位置に停止する。
【0047】
次に、図5、図6、図7及び図8を参照して、本実施例の自動耕耘植付機の動作について説明する。
【0048】
まず、初期状態において、オーガ昇降シリンダ装置14及びPチューブ昇降用シリンダ装置17は、短縮状態にあり、オーガ11及びPチューブ12は、それぞれ植林地上方のオーガ待機位置及びチューブ待機位置で待機している(図6(a)参照)。
【0049】
ここで、オーガ待機位置とは、図8に示すように、オーガ軸11aに設けられた一対のカッターバー11bが、一対のオーガ軸11aを結ぶ点線101に対して45°の角度をなした状態を意味している。また、チューブ待機位置で待機しているPチューブ12は、一対のカッターバー11bよりも上方に位置しており、Pチューブ12の先端開口部12dは、開き状態に設定されている。
【0050】
なお、電源投入時において(ステップS101)、オーガ11及びPチューブ12が、各待機位置よりも下方に位置している場合は(ステップS102)、オーガ昇降シリンダ装置14及びPチューブ昇降用シリンダ装置17を短縮方向に駆動して、各待機位置に戻す(ステップS103)。
【0051】
オーガ11がオーガ待機位置に待機している状態で、自動耕耘植付機に耕耘及び植付動作を指示する自動耕耘植付機駆動スイッチをオンすると、オーガ回転モータ13の駆動力が伝達ギア13b〜13eを介して伝達され、各オーガ11は、互いに反対方向に回転し、それぞれ所定方向に回転動作を開始する。また、この時、オーガ昇降シリンダ装置14のロッド部材14bを下方に駆動することにより、オーガ軸11aがガイド腕部35にガイドされた状態で、ギアボックス16及びオーガ11は、一体となって下方に移動する(ステップS104)。
【0052】
そして、一対のオーガ11が植林地の地面に達すると、図2に点線で示すように、回転しながら下降するカッターバー11bの堀削作用により、平面視8の字状の植穴が形成されるとともに、苗木の植付部分の周辺に生えている雑草が根こそぎ断ち切られる(図6(b)参照)。なお、雑草が根こそぎ断ち切られた状態において、植穴には堀削土が軟らかな状態で残っている。
【0053】
オーガ11が植穴を形成しながら所定量下降し、下側の駆動端に達したことを示す信号がオーガ下降センサ20から出力される(ステップS105)と、オーガ昇降シリンダ装置14のロッド部材14bを短縮方向に駆動して、植穴内に位置するオーガ11を上方へ退避させる(図6(c)参照、ステップS106)。なお、この退避動作の際、オーガ回転モータ13の駆動は維持されているため、オーガ11は、回転しながら上方に退避する。
【0054】
植穴内から退避したオーガ11がオーガ待機位置に対応する高さにまで上昇したことを、オーガ上昇センサ19が検知すると(ステップS107)、オーガ昇降シリンダ装置14及びオーガ回転モータ13の駆動を停止する(ステップS108)。なお、オーガ回転モータ13を停止した後、オーガ11は、慣性力により回転動作を継続する。したがって、オーガ11を図8に示すオーガ待機位置に停止させるためには、オーガ回転モータ13停止後の慣性力による回転量をも考慮して、オーガ回転モータ13の停止タイミングを制御する。
【0055】
そして、オーガ停止センサ22により、オーガ11がオーガ待機位置に停止したことが検知された場合(ステップS109)、チューブ開閉機構18のロッド部材18bを短縮方向に駆動して、中空開閉部27を閉じ方向に駆動する(ステップS110)。
【0056】
中空開閉部27が閉じ方向に駆動され、チューブ開閉センサ25からの出力信号によって、Pチューブ12の中空開口部12dが閉じ状態にあると判定された場合(ステップS111、図6(d)参照)、Pチューブ昇降用シリンダ装置17を駆動して、チューブ待機位置に待機しているPチューブ12を下降させる(ステップS112、図6(e)参照)。このとき、オーガ11の下端部に設けられた各カッターバー11bは、図8に示すように、オーガ待機位置、すなわち、点線101に対して45°の角度を成した状態で停止しており、この状態でPチューブ昇降用シリンダ装置17を駆動することにより、Pチューブ12を一対のカッターバー11bに干渉させることなく、下降させることができる。
【0057】
こうして、植穴に柔らかな状態で残っている堀削土に、中空開口部12dを閉じて、先端尖り状態にあるPチューブ12が所定量突き刺さると、チューブ貫入センサ23から苗木投入位置に達したことを示す信号が出力され(ステップS113)、Pチューブ昇降用シリンダ装置17によるPチューブ12の下降動作が停止される。Pチューブ12が下降動作を停止した状態で、開閉シリンダ18aを伸長方向に駆動すると、これに応じて開き方向に駆動される中空開閉部27によって、堀削土が押し広げられ、苗木の植付空間が確保される(ステップS114)。
【0058】
チューブ開閉センサ25から中空開口部12dが開き状態に設定されたことを示す信号が出力されると(ステップS115)、Pチューブ12の後端開口部から圧縮空気によって苗木が送り込まれ、この苗木は、重力落下により中空開閉部27によって押し広げられた植付空間に投入される(ステップS116、図6(g)参照)。
【0059】
苗木がPチューブ12を通って植付空間に排出されたことを、苗木通過センサ26が検知すると(ステップS117)、Pチューブ昇降用シリンダ装置17を短縮方向に駆動して、植付空間に位置するPチューブ12を上方へ退避させる(ステップS118、図6(h)参照)。
【0060】
この上方に退避したPチューブ12がチューブ待機位置まで上昇したことを、チューブ上昇センサ24が検知すると(ステップS119)、オーガ昇降シリンダ装置14を伸長方向に駆動して、オーガ待機位置にて待機している一対のオーガ11をオーガ軸11a周りに回転させることなく、下降させる(ステップS120)。
【0061】
オーガ11が下降すると、植穴内に柔らかな状態で残っている堀削土に一対のカッターバー11bが押圧され、展圧される(図6(i)参照)。オーガ11が下側駆動端に達したことが検知された場合(ステップS121)、オーガ昇降シリンダ装置14のロッド部材14bを短縮方向に駆動して、オーガ11を上昇させ(ステップS122)、オーガ待機位置にて(ステップS123)停止させる。
【0062】
このように、本実施例の自動耕耘植付機によれば、オーガ11を回転させながら下降させるだけで、植穴を形成しながら、苗木周辺の雑草を根こそぎ排除することができる。これにより、作業負担が軽減され、少ない労力で雑草排除と苗木の植付作業を連続的に行うことができる。
【図面の簡単な説明】
【0063】
【図1】自動植付き機の全体構成図
【図2】ギアボックスの断面図
【図3】Pチューブの動作説明図
【図4】センサの配置図
【図5】自動耕耘植付機の機能ブロック図
【図6a】自動耕耘植付機の動作説明図
【図6b】自動耕耘植付機の動作説明図
【図7a】自動耕耘植付機の動作制御を示したフローチャート
【図7b】自動耕耘植付機の動作制御を示したフローチャート
【図8】Pチューブを下方に駆動するときの、オーガの配置図
【符号の説明】
【0064】
11 オーガ
12 Pチューブ
13 オーガ駆動モータ
14 オーガ昇降シリンダ
15 フレーム
16 ギアボックス
17 チューブ駆動シリンダ
18 チューブ開閉機構
19 オーガ上昇センサ
20 オーガ下降センサ
21 オーガ回転センサ
22 オーガ停止センサ
23 チューブ貫入センサ
24 チューブ上昇センサ
25 チューブ開閉センサ
26 苗木通過センサ
30 制御回路
32 回転板
33 上部取り付け板
34 ブラケット
35 ガイド腕部
【特許請求の範囲】
【請求項1】
自走式移動装置のアーム部に取り付けられて使用される自動耕耘植付機であって、
前記アーム部に固定される固定フレーム部と、
前記固定フレーム部に対して昇降可能な植穴を掘削する一対のカッターバー付きオーガを回転可能に備えたオーガ部と、
前記固定フレームに対し前記オーガ部とは独立に昇降可能で、下端開口部に開閉可能な開閉手段を有する前記植穴に苗木を投入するためのプランティングチューブとを有することを特徴とする自動耕耘植付機。
【請求項2】
前記オーガ部を昇降させる第1の駆動手段と、前記一対のカッターバー付きオーガを回転させる第2の駆動手段と、前記プランティングチューブを昇降させる第3の駆動手段と、前記開閉手段を駆動する第4の駆動手段と、前記第1、第2、第3及び第4の駆動手段の駆動を制御する制御手段とを有し、
前記制御手段は、プランティングチューブとの干渉を避けるオーガ待機位置に位置する前記オーガ部を回転させながら下方に移動させ、植林地下の堀削位置まで掘削する第1の動作と、
前記堀削位置まで掘削した後、前記オーガ部を前記オーガ待機位置まで回転させながら上昇させて、停止する第2の動作と、
該第2の動作によって前記オーガ部が前記オーガ待機位置に停止している状態において、前記オーガ待機位置よりも上方に位置する前記オーガ部との干渉を避けるプランティングチューブ待機位置にて待機している前記プランティングチューブを、堀削土中の苗木投入位置まで下降させる第3の動作と、
前記苗木投入位置に前記プランティングチューブが位置する状態で、前記開閉手段を開き方向に駆動して、前記堀削土中に植付空間を形成する第4の動作と、
該第4の動作によって形成された前記植付空間に、苗木が投入された後、前記プランティングチューブを前記プランティングチューブ待機位置まで上昇させる第5の動作と、
該第5の動作が終了した後に、前記オーガ部を下降させ、前記カッターバーを前記堀削土に押し付けることにより、展圧する第6の動作とが行われるように前記第1、第2、第3及び第4の駆動手段を制御することを特徴とする請求項1に記載の自動耕耘植付機。
【請求項3】
前記プランティングチューブは、前記一対のカッターバー付きオーガの間に配置されることを特徴とする請求項1又は2に記載の自動耕耘植付機。
【請求項4】
前記オーガ部は、前記第2の駆動手段を収容するボックスを有しており、前記ボックスには、前記プランティングチューブに対して退避した退避形状部が設けられていることを特徴とする請求項3に記載の自動耕耘植付機。
【請求項5】
前記第2の動作において、前記オーガ部を前記オーガ待機位置に停止させるとき、
前記制御手段は、前記第一対のカッターバーが、前記一対のカッターバー付きオーガの各軸を結ぶ直線に対して、略45度の角度で停止するように、前記第2の駆動手段を制御することを特徴とする請求項1乃至4のいずれか一つに記載の自動耕耘植付機。
【請求項1】
自走式移動装置のアーム部に取り付けられて使用される自動耕耘植付機であって、
前記アーム部に固定される固定フレーム部と、
前記固定フレーム部に対して昇降可能な植穴を掘削する一対のカッターバー付きオーガを回転可能に備えたオーガ部と、
前記固定フレームに対し前記オーガ部とは独立に昇降可能で、下端開口部に開閉可能な開閉手段を有する前記植穴に苗木を投入するためのプランティングチューブとを有することを特徴とする自動耕耘植付機。
【請求項2】
前記オーガ部を昇降させる第1の駆動手段と、前記一対のカッターバー付きオーガを回転させる第2の駆動手段と、前記プランティングチューブを昇降させる第3の駆動手段と、前記開閉手段を駆動する第4の駆動手段と、前記第1、第2、第3及び第4の駆動手段の駆動を制御する制御手段とを有し、
前記制御手段は、プランティングチューブとの干渉を避けるオーガ待機位置に位置する前記オーガ部を回転させながら下方に移動させ、植林地下の堀削位置まで掘削する第1の動作と、
前記堀削位置まで掘削した後、前記オーガ部を前記オーガ待機位置まで回転させながら上昇させて、停止する第2の動作と、
該第2の動作によって前記オーガ部が前記オーガ待機位置に停止している状態において、前記オーガ待機位置よりも上方に位置する前記オーガ部との干渉を避けるプランティングチューブ待機位置にて待機している前記プランティングチューブを、堀削土中の苗木投入位置まで下降させる第3の動作と、
前記苗木投入位置に前記プランティングチューブが位置する状態で、前記開閉手段を開き方向に駆動して、前記堀削土中に植付空間を形成する第4の動作と、
該第4の動作によって形成された前記植付空間に、苗木が投入された後、前記プランティングチューブを前記プランティングチューブ待機位置まで上昇させる第5の動作と、
該第5の動作が終了した後に、前記オーガ部を下降させ、前記カッターバーを前記堀削土に押し付けることにより、展圧する第6の動作とが行われるように前記第1、第2、第3及び第4の駆動手段を制御することを特徴とする請求項1に記載の自動耕耘植付機。
【請求項3】
前記プランティングチューブは、前記一対のカッターバー付きオーガの間に配置されることを特徴とする請求項1又は2に記載の自動耕耘植付機。
【請求項4】
前記オーガ部は、前記第2の駆動手段を収容するボックスを有しており、前記ボックスには、前記プランティングチューブに対して退避した退避形状部が設けられていることを特徴とする請求項3に記載の自動耕耘植付機。
【請求項5】
前記第2の動作において、前記オーガ部を前記オーガ待機位置に停止させるとき、
前記制御手段は、前記第一対のカッターバーが、前記一対のカッターバー付きオーガの各軸を結ぶ直線に対して、略45度の角度で停止するように、前記第2の駆動手段を制御することを特徴とする請求項1乃至4のいずれか一つに記載の自動耕耘植付機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図7a】
【図7b】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6a】
【図6b】
【図7a】
【図7b】
【図8】
【公開番号】特開2007−6715(P2007−6715A)
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2005−188032(P2005−188032)
【出願日】平成17年6月28日(2005.6.28)
【出願人】(501186173)独立行政法人森林総合研究所 (91)
【Fターム(参考)】
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成17年6月28日(2005.6.28)
【出願人】(501186173)独立行政法人森林総合研究所 (91)
【Fターム(参考)】
[ Back to top ]