
船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法
【課題】ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算を可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法を提供する。
【解決手段】船舶の最適航路計算システム30において、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、設定対象の航路の途中において必須通過地点WPを任意に指定できる必須通過地点指定手段31と、必須通過地点WPの間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させるアイソクロム変更手段32を備えて構成する。
【解決手段】船舶の最適航路計算システム30において、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、設定対象の航路の途中において必須通過地点WPを任意に指定できる必須通過地点指定手段31と、必須通過地点WPの間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させるアイソクロム変更手段32を備えて構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の運河や海峡を挟んだ航路にも対応でき、全球対応(全地球対応)の最適航路計算を可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法に関する。
【背景技術】
【0002】
近年、船舶数の急増による運航規模の拡大、船員の減少と国際化、急激な原油高騰、そして環境問題、とりわけ地球温暖化ガス排出削減の必要性は国内外において急速な高まりをみせ、地球上で物流活動を営む海運業にとっても重要な課題となっている。特に、船舶の実海域性能の向上とウェザールーティングに代表される運航計画の最適化が重要なテーマとして注目されている。
【0003】
そして、経済性と効率化のみでなく環境負荷を考慮した船舶の実海域性能の向上と運航状況の効率化を実現するためには、気象、海象及び海流の情報、船速、主機関の運転状況などの運航情報を収集蓄積するだけでなく、より信頼性の高い状態でリアルタイムに船内と陸上オフィスが就航船の運航情報を共有化しながらモニタリングする技術と、タイムリーな支援技術と、性能評価技術が必要となる。
【0004】
このような環境において、船内と陸上オフィスで就航船の運航情報を共有化しながら運航管理を行う船陸統合型の情報インフラシステム構築の可能性を模索し、運航情報をリアルタイムでかつ信頼性の高い状態で船内と陸上オフィスが共有化しながら船舶の運航支援を行う運航モニタリングシステムが提案されている(特許文献1参照)。
【0005】
この運航モニタリングシステムは、就航船の航海・機関データをインターネット・ポータルサイト経由で陸上オフィスからモニタリングを可能とするシステムであり、航海データ(船位、気象・海象、海流)のみを表示するモニタリングシステムと異なり、主機をはじめとした搭載機器の運転データも同時にモニタリングすることが可能なシステムとなっている。
【0006】
また、海運業界と造船業界における地球温暖化ガス排出削減の取り組みにおいて、実海域性能の解析と評価技術を合わせ、気象・海象情報に対応して安全性と経済性を考慮した航路の最適化を行うウェザールーティング(Weather Routing )と最適航法(Optimum Routing)の技術が注目されている。
【0007】
従来技術のウェザールーティングは、主に気象・海象サービス会社によって提供されており、ここでは、簡易な近似式で波浪中の船速が計算されて最適航路が求められている。これらの気象・海象サービス会社は、気象・海象データ及び予測データに関しては独自のノウハウがあるという強みがある一方で、対象となる船舶の特性に関しては、経験的なデータのみで船体性能特性に対するノウハウが乏しく、個々の船舶の性能を特定できるまでには至っていないという弱みがある。
【0008】
近年では、運航ノウハウや保全ノウハウに基づく、直接的なコストダウン効果、安全運航/効率運航を支援する仕組み(サービス)が求められており、また、個船毎の船体運動特性と気象、海象及び海流の条件を考慮した最適航路計算システムが求められている。
【0009】
この最適航法計算に関しては、航路の選択を危険海域情報・波浪推算データ受信装置からの情報に基づいて選択し、同航路における多数の通過地点を選択し、各通過地点における通過予定時刻を設定し、船舶の現在の位置および時刻から目的港への到達時刻に見合うように船舶の通過予定時刻、航海速度及び舵角を順次設定する航海計画支援システムが提案されている(例えば、特許文献2参照)。
【0010】
また、船舶の海流中での流体抵抗に加えて、気象海象予報により予測される風圧抵抗及び波浪中抵抗増加を演算し、その演算結果に基づき予測される航路上の通過地点における通過予定時刻を過去のデータに基づく統計処理により補正して、目的港に許容誤差内に到達するための船速、舵角を演算し、この演算結果に基づいて主機関と舵角を制御して、目的港への定時到着と燃料消費率の改善と環境負荷の低減を図っている環境負荷低減型航海計画提供システムも提案されている(例えば、特許文献3参照)。
【0011】
また、船舶の個船性能データと海気象データとに基づいてある海域から目的地までの間で、船速、燃料消費量及びシーマージンを考慮して最適な航路を短時間で効率よく探索する最適航路探索システムも提案されている(例えば、特許文献4参照)。
【0012】
しかしながら、この実海域における性能解析技術及び最適航法若しくはウェザールーティングを運航管理の現場で実用的に運用するためには、運航状況に応じたリアルタイムな評価とフィードバックが行える実海域性能解析機能と、収集蓄積された就航データを解析することによって統計的に予測する実海域健康診断機能とを統合したトータル船舶の運航支援システムの構築が必要と考えられる。
【0013】
これに対応するために、本発明者らは、運航モニタリングシステムが収集した就航データ等を、就航船解析システムに入力して、最新の推定性能の情報等のデータを出力し、このデータと航路で予測される気象等の情報のデータを最適航路計算システムに入力して、最適航路に関する航海計画の情報等のデータを算出し、このデータと、気象、海象、海流の予報情報等のデータとを前記運航モニタリングシステムに入力して前記就航データ等を算出するように形成し、前記運航モニタリングシステムと前記就航船解析システムと前記最適航路計算システムで解析サイクルを形成する船舶の運航支援システム及び船舶の運航支援方法を提案した(例えば、特許文献5参照。)。
【0014】
これにより、実海域での船体性能を精度よく推定して、実運航にフィードバックすることで、燃費を向上し、CO2排出量の削減し、到着予定時刻(ETA)の予測精度を向上し、効果的な修繕計画を立てることができるになる。
【0015】
一方、実際に船舶の運航支援システムを搭載する船舶は、北太平洋等の一大洋だけでなく、PG−Japan航路のように、世界中の海洋を航行することが予想されるため、航空機に対するウェザールーティングではある程度一般化しているが、船舶に対するウェザールーティングシステムとしては殆ど例がない、全球(全地球)に対応したシステムの開発が要求されるようになってきている。
【0016】
この全球に対応したシステムにするためには、航行区間に航路、運河及び海峡なども含んだルーティングを行う必要がある。この運河及び海峡のような海域では、決められた航路があってルーティングする必要がない場合があり、制限速度のためや安全航行のために必然的に船速を落として航行するために、航行区間によって航行方法と主機回転数を設定できるようにして、それぞれの区間に対して最適化することで、全球に対応したシステムにする必要がある。
【0017】
しかしながら、従来技術の最適航路計算システムでは、出発点と到達点のみを指定しており、途中の必須通過地点(WP:Way Point)を指定した計算ができなかった。また、航路の最適化に等時間曲線法を用いている場合に、探索長さと探索間隔(アイソクロムの間隔)や探索範囲が固定されている。
【0018】
その結果、最適航路計算の対象は太平洋航路、大西洋航路等の大洋間の航路計算に限定され、マラッカ海峡、パナマ運河、スエズ運河等の海域の航行を含む航路全体に対する最適航路計算ができないという問題があった。
【0019】
言い換えれば、従来技術の最適航路演算ソルバーでは、北太平洋航路等の大きな探索範囲を必要とする航路計算を対象にしていたため、等時間曲線法の探索長さと探索間隔も範囲も大きく設定して固定しており、例えば、アイソクロムのパラメータが一定で24時間単位に固定しており、そのために、南シナ海や内航等の航行できる範囲が限られている場合や、最適化する区間が短い場合は、パラメータが大きめになってしまうことから、効率的な航路探索ができないという問題が生じていた。
【0020】
つまり、最適航路演算を行う範囲が非常に狭いエリアでかつ陸地に囲まれているような場合でも、太平洋の横断航路と同じパラメータを用いているため、変針点が24時間に一回となり、効率的な航路探索ができない上に、出発点の位置によっては島と島の間を上手く通過できない航路を設定してしまう場合や、島と島の間を通過できても不自然な航路を設定する場合があった。
【0021】
また、従来技術の最適化ロジックでは、船体運動を考慮した航路探索を採用した場合には、この計算に多くの時間が必要であったために、主機回転数を一定値に固定した条件でしか最小燃料航路計算ができなかった。つまり、主機回転数を変化させて多数の主機回転数パターンの計算で収束計算を行うと、計算時間や計算機能力に問題が生じるため、計算時間とその効果を考えると実用的な計算にはならなかった。
【0022】
そのため、燃料価格の上昇やCO2削減の気運も高まり、気象・海象によって主機回転数を最適化した上で航路探索をすることの重要性が高くなり、主機回転数を可変とした最小燃料航路の探索機能が要求されるようになってきたにもかかわらず、航路を全球に対応させる場合には、この計算量の問題が大きな問題となっていた。
【0023】
また、従来技術の最適航路演算ソルバーでは、海流は1航海中に大きな変化はないとして一定に固定し、また、最新又は設定した日時に発表された気象予測データを用いてのみ計算していた。例えば、月1回更新されるパイロットチャートからのデータを用いる等していた。そのため、航路計算において、より精度を高めるためには、航路のそれぞれの場所と時間に対応した気象・海象及び海流データを用いて航路探索を行う必要があるにもかかわらず、高精度の全球対応の海流予測データを用いた航路計算ができないという問題があった。
【先行技術文献】
【特許文献】
【0024】
【特許文献1】特開2008−198136号公報
【特許文献2】特開2005−162117号公報
【特許文献3】特開2007−45338号公報
【特許文献4】特開2007−57499号公報
【特許文献5】特開2009−286230号公報
【発明の概要】
【発明が解決しようとする課題】
【0025】
本発明は、上記の問題を解決するためになされたものであり、その目的は、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算を可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法を提供することにある。
【0026】
更には、全球を対象とした航路の最適化に際して、主機回転数を可変とした最小燃料航路の探索を可能とし、また、海流データも可変にすると共に航路のそれぞれの場所と時間に対応した任意の気象・海象及び海流データを用いて航路探索を行うことを可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法を提供することにある。
【課題を解決するための手段】
【0027】
上記の目的を達成するための本発明の船舶の最適航路計算システムは、船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータを算出する船舶の最適航路計算システムにおいて、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定できる必須通過地点指定手段と、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させるアイソクロム変更手段を備えて構成される。
【0028】
この必須通過地点指定手段を備えることで、最適航路計算の対象となる航路の途中に必須通過地点(WP:Way Point:必ず通過する地点)の任意指定を組み込むことができるので、これにより、マラッカ海峡、スエズ運河、パナマ運河等の、運河や海峡の通過航路を含む航路の計算が可能となる。例えば、事前に、マラッカ海峡、パナマ運河、スエズ運河等の運河や海峡ごとに、必須通過地点を設定した任意の航路計画を準備して、これに特定の識別名(例えば、「マラッカ海峡を含んだPG〜JPN航路」等)を付けて、最適航路計算システムで使用するデータ群に事前登録することで、設定対象の航路の途中における必須通過地点を容易に指定及び設定することができ、運河及び海峡を含む、全球対応(全地球対応)での最適航路探索が可能となる。
【0029】
また、アイソクロム変更手段を備えることにより、最適航路計算の対象となる航路に合わせてアイソクロムのパラメータを可変にすることにより、航路探索の計算効率を向上させることができ、様々な海域及び航路に対しても実用的な航路探索ができるようになる。
【0030】
上記の船舶の最適航路計算システムにおいて、航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出し、前記目標必須通過地点の直前のアイソクロムの端点から前記目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する主機回転数変更手段を備えて構成すると、この風や波などの気象、海象の条件を用いて主機回転数を制御して、遭遇する気象・海象の条件によって主機回転数を最適化するロジックにより、最小燃料航路探索機能を向上できる。
【0031】
この最適化ロジックは、必須通過地点の間の航路区間を2つのフェーズに分けてそれぞれ異なる方法で主機回転数を演算することで、航路と主機回転数を同時に計算でき、しかも、計算負荷が大きくならないロジックとなる。
【0032】
この気象、海象及び海流の条件と探索する航路の条件を用いた主機回転数の変更計算が実施できるようになったのは、上記のアイソクロム変更手段を備えることで、計算時間が短縮できたことにより、2〜3回の繰り返し計算が許容されるようになったおかげであり、アイソクロム変更手段との組み合わせで始めて採用できるものである。また、数十回〜数百回の繰り返し計算は、まだ、計算能力の面から実用的ではないため、2つのフェーズに分ける最適化ロジックにより、航路と主機回転数を同時に計算でき、かつ、計算負荷が大きくならないようすることで、主機回転数を変更できる航路探索を実用的に行うことができるようになる。
【0033】
上記の船舶の最適航路計算システムにおいて、前記主機回転数変更手段が、前記第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出して、設定主機回転数に対する主機回転数の増減速の割合を演算し、この演算した増減速の割合が減速に相当する場合は、この増減速の割合に残距離を用いて演算したゲインを乗じて残距離を考慮した割合を算出し、この残距離を考慮した割合に基づいて、前記設定主機回転数と上限主機回転数と下限主機回転数から、前記第1区間を航行する際に用いる主機回転数を求め、前記第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整するように構成すると、容易に主機回転数を決定できる。
【0034】
上記の船舶の最適航路計算システムにおいて、計算対象の個々の船舶毎に、その船舶の実海域性能を加味した船型モデルを作成し、ドック入り前/後、助燃剤、低摩擦塗料、船体省エネ付加物の少なくとも一つの性能向上効果を加味して、実際の運航データを解析する個船データ加味手段を備えて構成すると、この個々の船舶毎の船体の実海域における経年変化による推進性能の劣化分や向上分のみならず、波浪中抵抗増加による推進性能への影響を加味した実海域性能データに基づいた最適航路計算が可能になり、航路選定の精度がより向上する。
【0035】
上記の船舶の最適航路計算システムにおいて、航海途中における気象、海象及び海流データの最新予報データのみならず、任意の期日・時間及び地点を起点とした気象、海象及び海流のデータを選定して航路計算を行う気象等データ選択手段を備えて構成すると、最新予報データだけでなく、任意の期日・時間及び地点を起点として、リスティングした気象・海象(風速、風向、波高、波向き、波周期)及び海流(速度、ベクトル)等の気象等データを用いて航路計算ができるので、過去の気象、海象データを用いて航路選定計算を行うこともできるようになり、航路選定の評価を向上できる。
【0036】
上記の船舶の最適航路計算システムにおいて、船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度の少なくとも一つに対して閾値を設定する閾値設定手段を備えて構成すると、これにより、波や船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度が設定された閾値を超えないような航路設定がなされるので、航海中の最大波高、最大有義波高等)、最大ピッチ角度、最大ロール角度、最大船体加速度等が設定され、これらの範囲内になる条件下で航路探索がなされるので、船体及び積載貨物の安全性を確保するための最適航路計算が可能になる。
【0037】
そして、上記の目的を達成するための本発明の船舶の運航支援システムは、船舶の運航支援を行う船舶の運航支援システムであって、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとを有して構成されると共に、前記運航モニタリングシステムは、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、前記就航船解析システムは、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、前記最適航路計算システムは、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、前記運航モニタリングシステムは、前記第4データと、気象、海象、海流の予報情報を含む第5データを入力して前記第1データを算出するように形成され、前記運航モニタリングシステムと前記就航船解析システムと前記最適航路計算システムは解析サイクルを形成するように構成された船舶の運航支援システムにおいて、前記最適航路計算システムとして、上記の最適航路計算システムを備えて構成する。
【0038】
そして、上記の目的を達成するための本発明の船舶の最適航路計算方法は、船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報と船体運動の予測情報を含むデータを算出する船舶の最適航路計算方法において、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定すると共に、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させることを特徴とする方法である。
【0039】
この方法により、必須通過地点の任意指定を組み込むことができるので、これにより、運河や海峡の通過航路を含む航路の計算が可能となり、運河及び海峡を含む全球対応での最適航路探索が可能となる。また、最適航路計算の対象となる航路に合わせて、等時間曲線法におけるアイソクロムのパラメータを可変にすることができるので、様々な海域及び航路に対しても実用的な航路探索ができるようになる。
【0040】
また、上記の目的を達成するための本発明の船舶の運航支援方法は、対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとから構成される船舶の運航支援システムの船舶の運航支援方法であって、前記運航モニタリングシステムで、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、前記就航船解析システムで、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、前記最適航路計算システムで、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、この第4データと、気象、海象、海流の予報情報を含む第5データを前記運航モニタリングシステムに入力して前記第1データを算出する船舶の運航支援方法において、上記の最適航路計算方法を用いることを特徴とする方法である。この方法によれば、上記の船舶の最適航路計算方法と同様な作用効果を奏することができる。
【発明の効果】
【0041】
本発明の船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法によれば、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算が可能となる。
【0042】
更に、主機回転数変更手段を備えると、全球を対象とした航路の最適化に際して、主機回転数を可変とした最小燃料航路の探索が可能となり、個船データ加味手段を備えると、個々の船舶毎の船体の実海域における経年変化による推進性能の劣化分や向上分のみならず、波浪中抵抗増加による推進性能への影響を加味した実海域性能データに基づいた最適航路計算が可能となる。
【0043】
また、気象等データ選択手段を備えると海流データも可変にすると共に航路のそれぞれの場所と時間に対応した任意の気象・海象及び海流データを用いて航路探索を行うことが可能となる。
【0044】
その結果、本船固有の最新の実海域特性、航海予定海域の気象、海流の影響や船体動揺をも考慮した最短時間で到着する航路の探索や、燃費最小の航路の探索を行うことが可能となる。
【図面の簡単な説明】
【0045】
【図1】本発明の実施の形態の船舶の運航支援システムの構成を示す図である。
【図2】性能診断システムを加えた場合の本発明の実施の形態の船舶の運航支援システムの構成を示す図である。
【図3】最適航路計算システムのフローを示す図である。
【図4】気象、海象状態と船速低下及びエンジン負荷の関係を示す図である。
【図5】本発明の実施の形態の最適航路計算システムの構成を示す図である。
【図6】等時間曲線法のアイソクロムのパラメータを説明するための図である。
【発明を実施するための形態】
【0046】
以下図面を参照して本発明に係る船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法の実施の形態について説明する。
【0047】
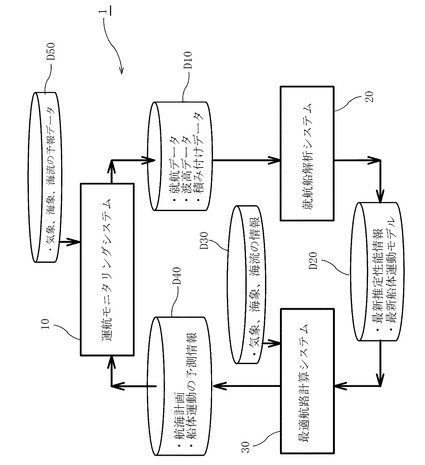
最初に、本発明の実施の形態の船舶の最適航路計算システム30を備えた本発明の実施の形態の船舶の運航支援システム1について説明する。図1に示すように、この船舶の情報処理システム1は、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30とを有して構成される。
【0048】
これらのシステム10,20,30は、コンピュータに搭載されたプログラム群で形成する。これらのプログラムが搭載されたコンピュータは、LAN又はインターネット回線等で、データベースの入出力を介して互いに連結される。
【0049】
また、データベースの記憶場所として、運航モニタリングシステム10の出力であり、かつ、就航船解析システム20の入力となる、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを記憶する第1データベース記憶装置D10を設け、就航船解析システム20の出力であり、かつ、最適航路計算システム30の入力となる、最新の推定性能の情報と最新の船体運動モデルを含む第2データを記憶する第2データベース記憶装置D20を設ける。
【0050】
更に、最適航路計算システム30の入力となる、航路で予測される気象、海象、海流の情報を含む第3データを記憶する第3データベース記憶装置D30と、最適航路計算システム30の出力であり、かつ、運航モニタリング10の入力となる、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを記憶する第4データベース記憶装置D40を設ける。また、更に、運航モニタリングシステム10の入力となる、気象、海象、海流の予報情報を含む第5データを記憶する第5データベース記憶装置D50を設ける。
【0051】
これらのデータベース記憶装置D10〜D50は個々の装置として設けてそれぞれのデータをそれぞれ1個の記憶装置に記憶してもよく、大きな記憶装置の一部として、第1〜第5のデータを同一の記憶装置に記憶しても良い。また、海象、気象、海流の情報である第3データは、海象、気象、海流のデータを商業的に配信する気象情報提供者から入手し、気象、海象、海流の予報情報である第5データも同様に入手する。この第5データは、運航モニタリングシステム10の船内情報処理システムで入手できる気象海象データとは別に得られるデータである。
【0052】
そして、運航モニタリングシステム10は、第4データベース記憶装置D40から最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データと、第5データベース記憶装置D50から気象、海象、海流の予報情報を含む第5データとを入力して、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを収集及び算出し、第1データベース記憶装置D10に出力する。
【0053】
この運航モニタリングシステム10は、船舶側の船内情報処理システムと陸上の陸側情報処理システムと、インターネット回線及び衛星通信システムからなる、これらの相互間のデータ送受信機構とを有して構成される。
【0054】
船内情報処理システムでは、航海用データと機関用データと含む運航用データの収集及び蓄積を行うと共に、船舶を管理する上で、不可欠なアブログ(ABLOG )とヌーンレポート(Noon Report )等の管理用データの作成及び管理を行う。これらの航海用データ、機関用データ、管理用データが、陸上情報処理システムに送られるが、これらの内から就航データ、風向風速データ、波高データ、積み付けデータ等の第1データを抜き出して第1データベース記憶装置D10に出力する。なお、船舶の運航に際しては、航海計画および船体運動の予測情報が必要であるので、これらの第4データを第4データベース記憶装置D40から入力する。
【0055】
陸側情報処理システムでは、ポータルサイトサーバーに設けられたデータ集積管理手段により、船内情報処理システムから送信されたデータの整理と管理を行うと共に、第1データの第1データベース記憶装置D10への出力を行う。また、この陸側情報処理システムでは、各陸上サービス利用者側に設けられた管理用コンピュータにより、蓄積されたアブログ及びヌーンレポートを閲覧及び集計ができるように構成される。また、手入力機能の拡張機能として、船内情報処理システムが収集したデータを修正できる機能も持たせ、修正の履歴を修正する前のデータと共に、第1データベース記憶装置D10に記憶できるように構成する。これにより、例えば、船舶に搭載されている温度センサ等の計測機器の経年劣化による誤計測を正すことができるようになる。
【0056】
就航船解析システム20は、第1データベース記憶装置D10から第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、第2データベース記憶装置D20に出力する。
【0057】
この就航船解析システム20は、特に燃費低減等の経済性、効率化そして地球温暖化ガス排出削減など環境負荷低減を考慮したより高度な運航支援を実現するため、対象となる船舶の実海域性能をより高精度に把握し、その実海域性能を効果的に利用できるようにするものである、また、就航船の増加による実績データの管理を簡単かつ有効活用できる機能も提供する。
【0058】
この就航船解析システム20では、水槽試験データおよび実績のある解析手法を基礎とした船舶性能推定技術を応用し、就航実績データとの相互リンクを併用することで対象船舶の実海域における実力性能の評価を高精度に行い最適航路計算システム30との連携で、対象船舶の経済性向上と環境負荷低減を考慮した運航管理支援機能をもたらすものである。なお、確率密度評価、潮流影響評価、主機特性、意図的な船速低下などの人的影響を考慮できるようにすることがより好ましい。
【0059】
この就航船解析システム20は、ポータルサイトサーバーに接続しているシステムであり、図1に示すように、第1データベース記憶装置D10から就航データ、風向風速データ、波高データ、積み付けデータ等の第1データを入力して、就航船解析計算プログラムにより、豊富な水槽試験と実績のある解析技術をベースとした船体運動モデルを採用した解析・推定エンジンで自動計算して、最新推定性能情報と最新船体運動モデル等を含む第2データを算出し、第2データベース記憶装置D20に出力する。
【0060】
これにより、対象船舶の就航実績データを基にした就航船解析と理論解析に基づいた実海域性能推定との相互リンクにより実海域における性能評価を高精度で行い、対象船舶の就航状況の確認と実力の把握、契約速力およびバンカー契約などの採算計算の支援、地球温暖化ガス排出量の把握、将来の性能状況予測に結び付ける。
【0061】
最適航路計算システム30は、第2データベース記憶装置D20から第2データを、また、それとともに、第3データベース記憶装置D30から航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、第4データベース記憶装置D40に出力する。
【0062】
この航海計画および船体運動の予測情報を含む第4データを実船の航海に取り入れて、その計画に基づいて、あるいは修正された計画に基づいて、実海域での航海用データや実船計測データ等を運航モニタリングシステム10で収集及び蓄積を行う。
【0063】
これらのサイクルを何回か経て、次のデータを得ることができる。データ統計解析結果として、就航情報、海象状況、速力状況、馬力状況、燃費状況、回転数状況等のデータを得られ、就航状況を確認できる。また、実海域性能推定・評価のデータとして、シーマージン解析、船速低下解析、平均燃料消費率解析(FOC解析)、モード解析等のデータが得られ、これらのデータは契約速力、バンカー契約の採算計算に活用することができる。
【0064】
また、船体・プロペラ汚損影響などの性能悪化要因として、回転数変化、平均燃料消費率変化、馬力変化、船速変化等のデータが得られ、ドック入りやメンテナンスの修繕計画に活用できる。
【0065】
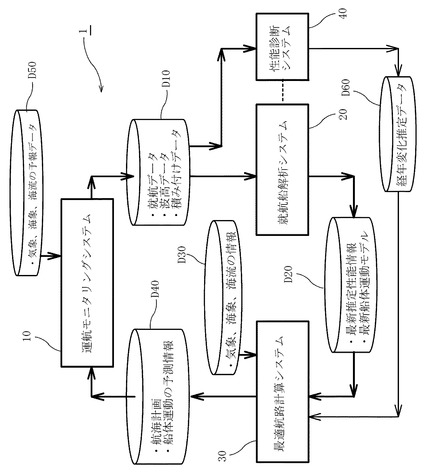
更に、好ましくは、図2に示すように、性能診断(健康診断)システム40を備えて形成され、この性能診断システム40が、運航モニタリングシステム10によって収集され、第1データベース記憶装置D10に記憶された第1データの内の就航データを入力して船体と機器の経年変化予測や余寿命診断を行って、推定性能経年変化シミュレーションとしての経年変化推定データや主機の余寿命診断等の第6データを算出し、第6データベース記憶装置D60に出力するように構成する。
【0066】
この性能診断システム40を備えた場合には、この性能診断システム40は、運航モニタリングシステム10によって収集され、第1データベース記憶装置D10に記憶された第1データの内の就航データを入力して船体と機器の経年変化予測を行って、推定性能経年変化シミュレーションとしての経年変化推定データや主機の余寿命診断等の第6データを算出し、第6データベース記憶装置D60に出力する。
【0067】
なお、この性能診断システム40の演算と就航船解析システム20の演算との間に共通する部分がある時は、適宜その結果を互いに利用できるように構成する。また、この経年変化推定データや主機の余寿命診断等の第6データを、最適航路計算システム30で利用することにより、最適航路計算の精度を向上できる場合もあるので、第6データを最適航路計算システム30に入力できるように構成する。
【0068】
この船舶の運航支援システム1では、対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30を使用して、運航モニタリングシステム10で、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを収集し、就航船解析システム20で、第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、最適航路計算システム30で、第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、この第4データと、気象、海象、海流の予報情報を含む第5データとを運航モニタリングシステム10に入力して第1データを算出する。これにより、計測、解析、航路選定のサイクルを形成する。
【0069】
例えば、対象船舶の本船上で計測・収集されたデータを就航船解析システム20の就航船解析プログラムで計算し、対象船舶の実海域の性能を推定し、この出力結果を、モード解析結果としてユーザーに提供すると共に、この推定性能を最適航路計算システム30に送り、最適航路計算プログラムで、気象・海象及び海流の予報情報を基にCO2排出量最小の航路を推定する。この運航計画を運航モニタリングシステム10の船内情報処理システムに送り、実航海にフィードバックする。
【0070】
また、例えば、舶用ディーゼルエンジン主機関向け、遠隔診断サービスを利用中のユーザーに対して、就航船解析システム20で船体全体の性能と主機関の性能を同時に推定・評価でき、その結果を最適航路計算に反映する。
【0071】
次に、本発明に係る実施の形態の最適航路計算システム30の特徴について説明する。この最適航路計算システム30は、図1及び図2に示すように、データベース記憶装置D20からの最新の推定性能情報と最新の船体運動モデルを含む第2データと、第3データベース記憶装置D30からの気象、海象、海流情報の第3データを入力し、燃料消費量最小航路計算と船体動揺対応航路計算を行って、航海計画と船体運動を算出し、これらの第4データを第4データベース記憶装置D40に出力するシステムである。
【0072】
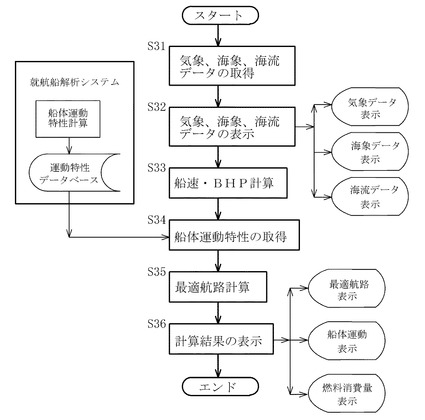
図3に最適航路計算システム30における制御のフローを示す。この最適航路計算では、最新の海流情報や船の現在位置、目的地への到達予定日を基に、航路や船舶のエンジン性能等の基本情報を用いて、船舶の位置やその付近の海流、気圧などから最適な速度を計算する。
【0073】
最適航路計算システム30では、対象となる船舶毎の船体運動の特性と気象・海象条件を考慮して最適航路の計算を行う。この船体運動の特性は就航船解析システム20の出力データを用いる。このデータを用いて、航海時間を最短とする最適航路を計算する。なお、最適化の評価関数として、航海時間、燃料消費量、船体運動等を用いることができる。
【0074】
最適航路計算システム30では、図3のステップS31で、気象・海象データを取得する。この気象・海象データは、気象情報提供者、例えば、日本気象協会のデータ配信サービスから、日本近海の詳細なデータである沿岸波浪GPVは12時間毎に、全球波浪GPVデータは24時間毎に入手する。ステップS32で、これらの気象・海象データを表示する。つまり、風況表示画面等で気象データを画面表示し、波浪表示画面等で海象データを画面表示する。
【0075】
ステップS33で船速・BHP(エンジン出力)計算を行い、ステップS34で就航船解析システム20で算出した運動特性のデータを取得する。ステップS35で最適航路を計算する。ステップS36でこの計算結果を表示する。例えば、最適航路計算画面で計算した航路と選定した最適航路と大圏航路を表示する。また、選定した最適航路と大圏航路に関して気象・海象の風速・有義波高と共に、動揺表示画面等で船体運動(例えば、ロール有義値、ピッチ有義値、船首加速度有義値)を、燃料消費量表示画面等で燃料消費量を、航海時間ベース等で表示する。
【0076】
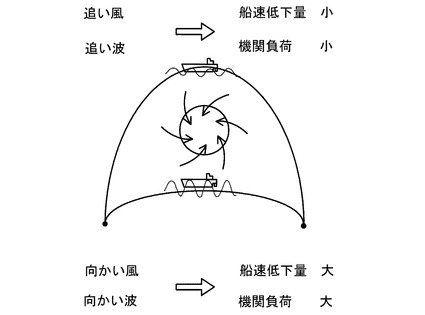
ここで、最適航路計算について説明する。船舶が大洋を航海する場合、低気圧の北側を航行するか南側を航行するかで、気象・海象の影響が大きく異なる。プロペラ回転数一定で、西向きに航行する場合を考えると、図4に示すように、低気圧の北側を航行するときには、追い風、追い波の状態での航行となり、船速の低下量は少なく、エンジンの負荷も小さくなり、燃料消費量が少なくなる。
【0077】
一方、低気圧の南側を航行するときには、強い向かい風、向かい波の状態での航行となり、船速が著しく低下し、エンジンの負荷が増大し、燃料消費量が多くなる。特に冬季北太平洋を西航する場合は、大圏航路付近を発達した低気圧が通過することにより、大圏航路付近から南側の広い範囲において向かい風、向かい波が卓越した状態になることが多い。
【0078】
船速はエンジンの出力の1/3乗に比例するため、エンジン出力を±30%調整しても、船速は±10%しか変動しない。この程度の船速の調整では、太平洋の気象・海象状況というスケールにおいて低気圧の南側の大波高域を避ける、あるいはより有利な状態の海域を航行することは困難である。
【0079】
そこで、大洋でよりよい状態の海域を航行するためには、まずは航路の選定が重要となる。出港前に、最新の気象・海象予報を利用して、高い向かい波を受けず、船速の低下量が小さくなるような航路を選択する。そして、航行中においては、更新される気象・海象予報を用いて常によりよい航路を選定し直す。
【0080】
最適航路を求めるには、膨大な量の気象、海象及び海流データだけでなく、船舶の耐航性能データも活用して最適航路計算を行う。まず、最適航路を求めるという問題を定式化し、最適化のための評価基準を数式で表現する。この最適航路選定問題を解くための最適化の手法としての最適化計算アルゴリズムには、変分法、ダイナミックプログラミング、等時間曲線法(Isochrone Method)、及び、多目的遺伝的アルゴリズムなどを使用することができるが、ここでは、計算時間の負荷及び計算の収束性を考慮して等時間曲線法を用いる。
【0081】
この等時間曲線法は、発散や計算結果が得られない様なことが生じない、安定した計算結果が得られる方法であり、全球対応(全地球対応)の最短時間航路の計算に用いる最適化計算に向いている。設定された通過地点間の航路区間をLegとすると、例えば第1通過地点P1と第2通過地点P2の間は第1航路区間Leg1となり、第2通過地点P2と第3通過地点P3の間は第2航路区間Leg2となるように定義して、航路計算は航路区間Leg毎に行う。この等時間曲線法では、出発地から一定時間後で到達し得る領域の外側境界を等時間曲線と言い、これらを逐次求めて最短時間航路を決定する。
【0082】
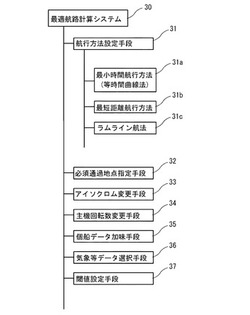
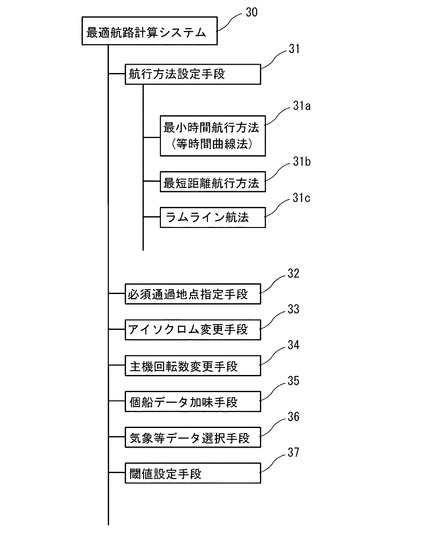
次に、本発明に係る実施の形態の最適航路計算システム30における本発明の特徴について説明する。図5に示すように、この最適航路計算システム30は、航行方法設定手段31、必須通過地点指定手段32、アイソクロム変更手段33、主機回転数変更手段34、個船データ加味手段35、気象等データ選択手段36、閾値設定手段37等の新たな手段を備えて構成される。
【0083】
航行方法設定手段30は、最適航路の計算に際しての航行方法を選択して設定するための手段である。この航行方法とは、航路区間を航行する際の最短時間で航行可能となる航行方法(最短時間航路:主機回転数一定)、最短距離で結ぶ航行方法(大圏航路)、沿岸航行や航路内などに用いる方位を一定にして航行するラムライン航法などを示し、図5に例示する。
【0084】
一般的に航路計画を行う場合には、航路、運河及び海峡など必然的に航路が決まる場合や、治安などの要因によって航行海域を選択する場合が考えられる。この様なことに対応するために、選択された航行海域の航行区間における航行方法を選択して設定できるように、航行方法を選択して航路探索計算モードを指定できるようにする。
【0085】
必須通過地点指定手段32は、設定対象の航路の途中において必須通過地点(WP:Way Point:必ず通過する地点)を任意に指定できるようにする手段であり、この必須通過地点指定手段30を備えることで、最適航路計算の対象となる航路の途中に必須通過地点を任意に指定して組み込むことができる。この必須通過地点の設定は手動で行うように構成してもよく、予め、航路の出入ロなどに固定必須通過地点を設定しておき、航路設定の際にその必須通過地点を用いるように構成してもよい。
【0086】
これにより、マラッカ海峡、スエズ運河、パナマ運河等の、運河や海峡の通過航路を含む様々な海域及び航路における計算が可能となり、実用的な航路探索が可能となる。例えば、事前に、マラッカ海峡、パナマ運河、スエズ運河等の運河や海峡ごとに、必須通過地点を設定した任意の航路計画を準備して、これに特定の識別名(例えば、「マラッカ海峡を含んだPG〜JAPAN航路」等)を付けて、最適航路計算システムで使用するデータ群に事前登録することで、設定対象の航路の途中における必須通過地点を容易に指定及び設定することができる。その結果、運河及び海峡を含む、全球対応(全地球対応)での最適航路探索が可能となる。
【0087】
このアイソクロム変更手段33は、必須通過地点の間の距離によって等時間曲線法で用いるアイソクロム(Isochrone)の間隔と探索範囲を変化させる手段であり、このアイソクロム変更手段33により、最適航路計算の対象となる航路の探索する航路区間に合わせて、等時間曲線法におけるアイソクロムのパラメータを可変にする。その結果、様々な海域及び航路に対しても実用的な航路探索ができるようになる。
【0088】
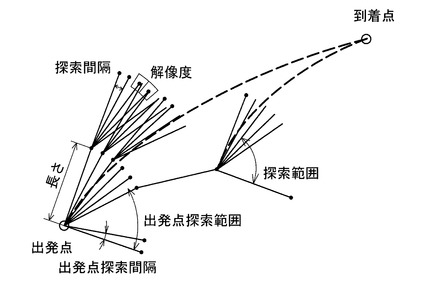
このアイソクロム変更手段33を用いる等時間曲線法による計算では、最適な探索長さと探索間隔(アイソクロムの間隔)や探索範囲を自動で選択して最適化を行うロジックを備え、航海時間を指定し、適当な主機回転数を設定すると、等時間曲線法を用いて最短時間航路とその航海時間を算出するように構成される。この探索長さと探索間隔と探索範囲は、手動入力にしてもよいが、航路途中に指定された必須通過地点の間の航路区間の距離により自動的に最適選定するように構成することが好ましい。
【0089】
必須通過地点間距離によって、最適な探索長さと探索間隔と探索範囲を自動で選択して、最適化を行うロジックとして、図6に示すような、アイソクロムの長さ(Span)、間隔(deg.)、範囲(deg.)、距離評価範囲(解像度)(Mile)を、必須通過地点間距離によって、又は、必須通過地点間で設定された主機回転数に対応する船速で航行した際に係る時間によって、例えば、近距離用(Near)、中距離用(Middle)、遠距離用(Long)の3段階で切り替えるようにして、更に、出発点とそれ以外の点での間隔と範囲を別々に設定できるように構成する。
【0090】
必須通過地点間距離によるアイソクロムのパラメータの切換えは、実際には設定したデフォルトの主機回転数で、設定した時間(24h、12h、6h等)で航行可能な距離で定義することによって、対象船の設定した主機回転数によって船速が変化した場合にも対応できる。また、航路探索時の計算時間を短縮できるように、アイソクロムパラメータと同様に必須通過地点間距離によって、船速計算間隔(hour)も切換えるようにする。更に、これらの設定パラメータは、全て設定ファイルを編集することによってパラメータを変更できるようにする。
【0091】
このアイソクロムのパラメータを可変にした効果を確認するために、ある供試船で、シンガポールと日本の間の航路で、アイソクロムの長さ(Span)を6h(時間)、12h、24hに切換えてシミュレーションを実施した。その計算結果の航路を見てみると、6hでは、この時期に黒潮を避けて多くの船舶が選択しているのと同じ航路となり、島と島の間を通過して沖縄の西側を航行する航路となっている。一方、12h及び24hでは、島と島の間を通過しないで、沖縄の太平洋側の最短ルートとなっている。そして、6hの航路では、12h及び24hの航路と比較して、燃料消費量が約0.5%少なくなっていることが分かった。
【0092】
これらの結果から、島が点在する海域や陸地に囲まれた航路に対して、アイソクロムを展開するパラメータを可変にすることによって、より実用的な航路を探索できることが確認できた。また、長い航路でも航路探索に使用する計算時間が10分程度で終了するようになると同時に、短い航路の場合は細かく計算するので、良好な計算結果が得られ、しかもそれに要する計算時間を短縮できた。
【0093】
主機回転数変更手段34は、目的地の指定と、到達時間の指定を受けて、最小燃料航行方法による航路探索に関係する手段であり、この最小燃料航行方法では、船舶が運航される際に運航者が船速または主機回転数を決定するプロセスに注目し、主機回転数を決定するプロセスを使用する。この気象、海象及び海流条件を用いた主機回転数の制御のロジックは、以下のようなものである。
【0094】
海象が悪く荒れている時は、主機がトルクリッチになりトリップすることを避けるようにするため、船速を落とす。また、海象が穏やかな時は、船舶の目的地への到着時間をキープするための余裕時間を確保するために船速を上げる。また、向かい風が強い時は減速し、追い風の時には増速する。更に、残りの航海時間が多いときには、減速しすぎると到達時間をキープできなくなるため、減速量を抑える傾向にする。
【0095】
これらのロジックで確保した余裕時間を用いて、残りの航海時間(航海距離)がすくなくなると、現在の船速と距離から到達時間を推定することが容易になるため、予定した時間に到着点に到着するように、船速又は主機回転数を調整する。
【0096】
この第1区間の前期段階と第2区間の後期段階の2つのフェーズに分けてそれぞれ異なる方法で主機回転数を演算する最適化のロジックを用いることで、航路と主機回転数を同時に計算でき、かつ、計算負荷が過剰にならないロジックとすることができる。その結果、短時間での航路検索が可能となる。
【0097】
主機回転数変更手段34は、航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出し、目標必須通過地点の直前のアイソクロムの端点から目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する。
【0098】
より具体的には、主機回転数変更手段34は、航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を気象、海象のデータ、即ち、波高、波向き、波周期、相対風速と海流によって算出して、設定主機回転数に対する主機回転数の増減速の割合(主機回転数を操作する割合(±1.0で定義))を演算し、この演算した増減速の割合が減速に相当する場合は、この増減速の割合に残距離を用いて演算したゲインを乗じて残距離を考慮した割合を算出し、この残距離を考慮した割合に基づいて、設定主機回転数と上限主機回転数と下限主機回転数から、第1区間を航行する際に用いる主機回転数を求め、残りの最終アイソクロムの端点から目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する。
【0099】
この主機回転数変更手段34により、風速、風向、波高、波向き、波周期、海流等の気象、海象及び海流の条件を用いて主機回転数を制御して、設定航路において遭遇する気象、海象及び海流に応じて主機回転数を最適化するので、最小燃料航路探索機能を向上できる。つまり、従来技術の最小燃料航路は、主機回転数を一定にしてしか計算できなかったが、気象、海象及び海流の条件を用いて主機回転数を可変にする機能を持たせる。
【0100】
また、船体運動を推定するためには、船体まわりの流場を求めることが必要となる。船体は細アナ外形状をしているため、まず船体各断面の2次元問題として流場を解いて2次元流体力を求め、次にこの2次元流体力をベースとして船体の3次元流体力を求めるいわゆるストリップ法が有効であり、実用的な評価が得られている。
【0101】
まず、船体運動計算システム(SCS:Ship-motion Calculation System)で流体力を計算し、各波向き、波周期毎の船体運動を予め計算し、船体運動のデータベースを作成する。時々刻々の波浪から船体運動を計算するには、船体運動のデータベースを基にして、海象データから船体運動を計算する。これにより、種々の船舶に対して運動計算を容易に行うことが可能となり、サービス対象船語の性能を評価することができる。
【0102】
気象等データ選択手段36は、航海途中における気象、海象及び海流データ(以下、気象等データ)の最新予報データのみならず、任意の期日・時間及び地点を起点とした気象等データを選定して航路計算を行う手段であり、この気象等データ選択手段により、最新予報データだけでなく、任意の期日・時間及び地点を起点として、リスティングした気象・海象(風速、風向、波高、波向き)及び海流(速度、ベクトル)等のデータを用いて航路計算ができるので、過去の気象等データを用いて航路選定計算を行うこともできるようになる。その結果、航路選定の評価を向上できる。
【0103】
つまり、従来技術では、海流は一航海中に大きな変化は無いとして、海流データの時間軸での補間機能を設けずに、一定としていたが、補間機能を設けることで、異なる時刻の海流データも用いることができるようにする。この補間機能により、複数の時間の海流データを読み込み、任意の時間間隔に対応した海流の情報を算出できるようになる。
【0104】
また、現在時間と出航時間を参照して、最新の気象等データリスト作成機能を呼び出す機能を設けたり、気象等データリストファイルを参照して、気象等データを読み込む機能を追加したりする。また、気象等データリストファイルから読み込んだ経過時間を用いて、任意の時間間隔の気象等データに対応した最適航路計算を行えるようにする。
【0105】
より具体的には、従来技術では一つの気象等データのみに対応していたソルバーモジュールを、気象等データリストファイルを参照し、複数の時間のから気象等データ読み込み、任意の時間間隔の気象等データに対応する演算機能を追加する。更に、最新の気象等データの予測データが転送されるのを監視し、転送されてきたデータを受信すると同時に処理して、データベース用の形式に変換してデータベースに記憶すると共に、最適航路計算システム30の表示用データベースに登録するデータ管理システムを設け、このデータ管理システムから最適航路計算システム30の表示用データベースにデータを出力して表示するようにする。
【0106】
なお、最適航路計算システム30から気象等データをダウンロードする際に、気象等データの受信やユーザーへのデータ点素に影響を与えないようにするために、帯域制御機能を付加したFTPサーバーを設ける。これにより、現在時間と出航時間等の設定した計算条件に対して、保持及び記憶している気象等データのデータベースを参照して航路探索に用いる最適な気象等データのリストを作成し、このリストの最適の気象等データを選択して、航路探索用のデータとして読み込んで、航路探索計算をする。言い換えれば、設定した計算条件と保持している気象等データを確認して、計算に用いる気象等データのリストを作成するプリリストシステムと、この作成された高精度な気象等データのリスト用いて、航路検索を行う。
【0107】
その結果、航海途中における気象等データの最新予報データのみならず、過去の現状予測データ、架空のデータ等の多くの様々なデータによる航路探索が可能となり、気象等データの時刻にとらわれない航路探索が可能になる。
【0108】
この気象、海象データの例としては、気象庁より1日4回GPV(Grid Point Value)データで配信されている全球モデル予報値のうちの全球数値予報モデル(GSM)のGPVデータと全球波浪数値予報モデル(GWM)GPVデータの2種類のデータがある。このGPVデータは、0.5度間隔の緯度経度の交点の値の予測値である。また、海流データとしては、パイロットチャート(Pilot Chart)から読み込んだデータ、及び独立行政法人海洋研究開発機構で開発された海流予測情報利用LLPより配信される海流情報がある。
【0109】
閾値設定手段37は、船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度に対して閾値を設定する手段であり、この閾値設定手段37により、船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度が設定された閾値を超えないような航路設定がなされるので、航海中の波高、ピッチ角度、ロール角度、船体加速度等が設定された閾値内になり、船体及び積載貨物の安全性を確保するための最適航路計算が可能になる。つまり、この船体動揺に対する閾値を設定することで積載貨物へのダメージを軽減できる。
【0110】
なお、この最適航路計算システム30で用いる入出力ファイル名、気象等データのリストファイル名、また、アイソクロムのパラメータ等を設定ファイルから読み込むように構成し、様々な検討及びサービス運用に柔軟に対応できるようにする。
【0111】
また、計算用のデータや計算結果の表示はグラフィカルな表示とすることが好ましく、航路計算結果に、気象、海象及び海流データを重畳表示したり、船体動揺、船速、燃費、航続時間、距離を表やグラフ表示したりする。なお、現在の航行位置は、運航データ収集システムである運航モニタリングシステム10からのデータを表示する。
【0112】
上記の船舶の最適航路計算システム30によれば、ペルシャ湾と日本との間、日本とオーストラリアの間、シンガポールと地中海との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算が可能となる。更に、全球を対象とした航路の最適化に際して、主機回転数を可変とした最小燃料航路の探索、個々の船舶毎の船体の実海域における経年変化による推進性能の劣化分や向上分のみならず、波浪中抵抗増加による推進性能への影響を加味した実海域性能データに基づいた最適航路計算、気象等データ選択手段を備えると海流データも可変にすると共に航路のそれぞれの場所と時間に対応した任意の気象・海象及び海流データを用いて航路探索等が可能となる。
【0113】
その結果、本船固有の最新の実海域特性、航海予定海域の気象、海流の影響や船体動揺をも考慮した最短時間で到着する航路の探索や、燃費最小の航路の探索を行うことが可能となる。
【0114】
また、最短時間航路探索モード、到着時間指定での燃料最小航路探索モードの指定により、IMO(国際海事機関)規則のSEEMP(船舶エネルギー効率マネジメントプラン)/EEOI(新造船エネルギー効率設計指針)への対応を支援できる。例えば、大圏航路と比較して約10%の燃費削減ルートを探索できる。また、実運行の航路と比較した後解析が可能となる。
【0115】
そして、本発明に係る実施の形態の船舶の最適航路計算方法では、船舶の推定性能の情報と船体運動モデルを含むデータD20と、設定対象の航路で予測される気象、海象、海流の情報を含むデータD30を入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータD40を算出する船舶の最適航路計算方法において、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、設定対象の航路の途中において必須通過地点(WP)を任意に指定すると共に、必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させる。この方法により、上記の船舶の最適航路計算システム30と同様な作用効果を奏することができる。
【0116】
また、本発明に係る実施の形態の船舶の運航支援システム1は、船舶の運航支援を行う船舶の運航支援システムであって、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30とを有して構成されると共に、運航モニタリングシステム10は、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データD10を算出し、就航船解析システム20は、第1データD10を入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データD20を算出し、最適航路計算システム30は、第2データD20と、航路で予測される気象、海象、海流の情報を含む第3データD30を入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データD40を算出し、運航モニタリングシステム10は、第4データD40と、気象、海象、海流の予報情報を含む第5データD50を入力して第1データD10を算出するように形成され、運航モニタリングシステム10と就航船解析システム20と最適航路計算システム30は解析サイクルを形成するように構成されると共に、上記の最適航路計算システム30を備えて構成される。この上記の最適航路計算システム30を備えることにより、上記の最適航路計算システム30と同様の効果を奏することができる。
【0117】
そして、本発明に係る実施の形態の船舶の運航支援方法では、対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30とから構成される船舶の運航支援システム1の船舶の運航支援方法であって、運航モニタリングシステム10で、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データD10を算出し、航解析システム20で、第1データD10を入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データD20を算出し、最適航路計算システム30で、第2データD20と、航路で予測される気象、海象、海流の情報を含む第3データD30を入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データD40を算出し、この第4データD40と、気象、海象、海流の予報情報を含む第5データD50を運航モニタリングシステム10に入力して第1データD10を算出する船舶の運航支援方法において、上記の最適航路計算方法を用いる。この方法により、上記の船舶の運航支援システム1と同様な作用効果を奏することができる。
【産業上の利用可能性】
【0118】
上記の船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法は、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算ができるので、多くの船舶における最適航路計算システム、運航支援システム、最適航路計算方法、及び船舶の運航支援方法として利用することができる。
【符号の説明】
【0119】
1 船舶の運航支援システム
10 運航モニタリングシステム
20 就航船解析システム
30 最適航路計算システム
31 航行方法設定手段
32 必須通過地点指定手段
33 アイソクロム変更手段
34 主機回転数変更手段
35 個船データ加味手段
36 気象等データ選択手段
37 閾値設定手段
40 性能診断システム
D10 第1データベース記憶装置
D20 第2データベース記憶装置
D30 第3データベース記憶装置
D40 第4データベース記憶装置
D50 第5データベース記憶装置
D60 第6データベース記憶装置
【技術分野】
【0001】
本発明は、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の運河や海峡を挟んだ航路にも対応でき、全球対応(全地球対応)の最適航路計算を可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法に関する。
【背景技術】
【0002】
近年、船舶数の急増による運航規模の拡大、船員の減少と国際化、急激な原油高騰、そして環境問題、とりわけ地球温暖化ガス排出削減の必要性は国内外において急速な高まりをみせ、地球上で物流活動を営む海運業にとっても重要な課題となっている。特に、船舶の実海域性能の向上とウェザールーティングに代表される運航計画の最適化が重要なテーマとして注目されている。
【0003】
そして、経済性と効率化のみでなく環境負荷を考慮した船舶の実海域性能の向上と運航状況の効率化を実現するためには、気象、海象及び海流の情報、船速、主機関の運転状況などの運航情報を収集蓄積するだけでなく、より信頼性の高い状態でリアルタイムに船内と陸上オフィスが就航船の運航情報を共有化しながらモニタリングする技術と、タイムリーな支援技術と、性能評価技術が必要となる。
【0004】
このような環境において、船内と陸上オフィスで就航船の運航情報を共有化しながら運航管理を行う船陸統合型の情報インフラシステム構築の可能性を模索し、運航情報をリアルタイムでかつ信頼性の高い状態で船内と陸上オフィスが共有化しながら船舶の運航支援を行う運航モニタリングシステムが提案されている(特許文献1参照)。
【0005】
この運航モニタリングシステムは、就航船の航海・機関データをインターネット・ポータルサイト経由で陸上オフィスからモニタリングを可能とするシステムであり、航海データ(船位、気象・海象、海流)のみを表示するモニタリングシステムと異なり、主機をはじめとした搭載機器の運転データも同時にモニタリングすることが可能なシステムとなっている。
【0006】
また、海運業界と造船業界における地球温暖化ガス排出削減の取り組みにおいて、実海域性能の解析と評価技術を合わせ、気象・海象情報に対応して安全性と経済性を考慮した航路の最適化を行うウェザールーティング(Weather Routing )と最適航法(Optimum Routing)の技術が注目されている。
【0007】
従来技術のウェザールーティングは、主に気象・海象サービス会社によって提供されており、ここでは、簡易な近似式で波浪中の船速が計算されて最適航路が求められている。これらの気象・海象サービス会社は、気象・海象データ及び予測データに関しては独自のノウハウがあるという強みがある一方で、対象となる船舶の特性に関しては、経験的なデータのみで船体性能特性に対するノウハウが乏しく、個々の船舶の性能を特定できるまでには至っていないという弱みがある。
【0008】
近年では、運航ノウハウや保全ノウハウに基づく、直接的なコストダウン効果、安全運航/効率運航を支援する仕組み(サービス)が求められており、また、個船毎の船体運動特性と気象、海象及び海流の条件を考慮した最適航路計算システムが求められている。
【0009】
この最適航法計算に関しては、航路の選択を危険海域情報・波浪推算データ受信装置からの情報に基づいて選択し、同航路における多数の通過地点を選択し、各通過地点における通過予定時刻を設定し、船舶の現在の位置および時刻から目的港への到達時刻に見合うように船舶の通過予定時刻、航海速度及び舵角を順次設定する航海計画支援システムが提案されている(例えば、特許文献2参照)。
【0010】
また、船舶の海流中での流体抵抗に加えて、気象海象予報により予測される風圧抵抗及び波浪中抵抗増加を演算し、その演算結果に基づき予測される航路上の通過地点における通過予定時刻を過去のデータに基づく統計処理により補正して、目的港に許容誤差内に到達するための船速、舵角を演算し、この演算結果に基づいて主機関と舵角を制御して、目的港への定時到着と燃料消費率の改善と環境負荷の低減を図っている環境負荷低減型航海計画提供システムも提案されている(例えば、特許文献3参照)。
【0011】
また、船舶の個船性能データと海気象データとに基づいてある海域から目的地までの間で、船速、燃料消費量及びシーマージンを考慮して最適な航路を短時間で効率よく探索する最適航路探索システムも提案されている(例えば、特許文献4参照)。
【0012】
しかしながら、この実海域における性能解析技術及び最適航法若しくはウェザールーティングを運航管理の現場で実用的に運用するためには、運航状況に応じたリアルタイムな評価とフィードバックが行える実海域性能解析機能と、収集蓄積された就航データを解析することによって統計的に予測する実海域健康診断機能とを統合したトータル船舶の運航支援システムの構築が必要と考えられる。
【0013】
これに対応するために、本発明者らは、運航モニタリングシステムが収集した就航データ等を、就航船解析システムに入力して、最新の推定性能の情報等のデータを出力し、このデータと航路で予測される気象等の情報のデータを最適航路計算システムに入力して、最適航路に関する航海計画の情報等のデータを算出し、このデータと、気象、海象、海流の予報情報等のデータとを前記運航モニタリングシステムに入力して前記就航データ等を算出するように形成し、前記運航モニタリングシステムと前記就航船解析システムと前記最適航路計算システムで解析サイクルを形成する船舶の運航支援システム及び船舶の運航支援方法を提案した(例えば、特許文献5参照。)。
【0014】
これにより、実海域での船体性能を精度よく推定して、実運航にフィードバックすることで、燃費を向上し、CO2排出量の削減し、到着予定時刻(ETA)の予測精度を向上し、効果的な修繕計画を立てることができるになる。
【0015】
一方、実際に船舶の運航支援システムを搭載する船舶は、北太平洋等の一大洋だけでなく、PG−Japan航路のように、世界中の海洋を航行することが予想されるため、航空機に対するウェザールーティングではある程度一般化しているが、船舶に対するウェザールーティングシステムとしては殆ど例がない、全球(全地球)に対応したシステムの開発が要求されるようになってきている。
【0016】
この全球に対応したシステムにするためには、航行区間に航路、運河及び海峡なども含んだルーティングを行う必要がある。この運河及び海峡のような海域では、決められた航路があってルーティングする必要がない場合があり、制限速度のためや安全航行のために必然的に船速を落として航行するために、航行区間によって航行方法と主機回転数を設定できるようにして、それぞれの区間に対して最適化することで、全球に対応したシステムにする必要がある。
【0017】
しかしながら、従来技術の最適航路計算システムでは、出発点と到達点のみを指定しており、途中の必須通過地点(WP:Way Point)を指定した計算ができなかった。また、航路の最適化に等時間曲線法を用いている場合に、探索長さと探索間隔(アイソクロムの間隔)や探索範囲が固定されている。
【0018】
その結果、最適航路計算の対象は太平洋航路、大西洋航路等の大洋間の航路計算に限定され、マラッカ海峡、パナマ運河、スエズ運河等の海域の航行を含む航路全体に対する最適航路計算ができないという問題があった。
【0019】
言い換えれば、従来技術の最適航路演算ソルバーでは、北太平洋航路等の大きな探索範囲を必要とする航路計算を対象にしていたため、等時間曲線法の探索長さと探索間隔も範囲も大きく設定して固定しており、例えば、アイソクロムのパラメータが一定で24時間単位に固定しており、そのために、南シナ海や内航等の航行できる範囲が限られている場合や、最適化する区間が短い場合は、パラメータが大きめになってしまうことから、効率的な航路探索ができないという問題が生じていた。
【0020】
つまり、最適航路演算を行う範囲が非常に狭いエリアでかつ陸地に囲まれているような場合でも、太平洋の横断航路と同じパラメータを用いているため、変針点が24時間に一回となり、効率的な航路探索ができない上に、出発点の位置によっては島と島の間を上手く通過できない航路を設定してしまう場合や、島と島の間を通過できても不自然な航路を設定する場合があった。
【0021】
また、従来技術の最適化ロジックでは、船体運動を考慮した航路探索を採用した場合には、この計算に多くの時間が必要であったために、主機回転数を一定値に固定した条件でしか最小燃料航路計算ができなかった。つまり、主機回転数を変化させて多数の主機回転数パターンの計算で収束計算を行うと、計算時間や計算機能力に問題が生じるため、計算時間とその効果を考えると実用的な計算にはならなかった。
【0022】
そのため、燃料価格の上昇やCO2削減の気運も高まり、気象・海象によって主機回転数を最適化した上で航路探索をすることの重要性が高くなり、主機回転数を可変とした最小燃料航路の探索機能が要求されるようになってきたにもかかわらず、航路を全球に対応させる場合には、この計算量の問題が大きな問題となっていた。
【0023】
また、従来技術の最適航路演算ソルバーでは、海流は1航海中に大きな変化はないとして一定に固定し、また、最新又は設定した日時に発表された気象予測データを用いてのみ計算していた。例えば、月1回更新されるパイロットチャートからのデータを用いる等していた。そのため、航路計算において、より精度を高めるためには、航路のそれぞれの場所と時間に対応した気象・海象及び海流データを用いて航路探索を行う必要があるにもかかわらず、高精度の全球対応の海流予測データを用いた航路計算ができないという問題があった。
【先行技術文献】
【特許文献】
【0024】
【特許文献1】特開2008−198136号公報
【特許文献2】特開2005−162117号公報
【特許文献3】特開2007−45338号公報
【特許文献4】特開2007−57499号公報
【特許文献5】特開2009−286230号公報
【発明の概要】
【発明が解決しようとする課題】
【0025】
本発明は、上記の問題を解決するためになされたものであり、その目的は、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算を可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法を提供することにある。
【0026】
更には、全球を対象とした航路の最適化に際して、主機回転数を可変とした最小燃料航路の探索を可能とし、また、海流データも可変にすると共に航路のそれぞれの場所と時間に対応した任意の気象・海象及び海流データを用いて航路探索を行うことを可能とした船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法を提供することにある。
【課題を解決するための手段】
【0027】
上記の目的を達成するための本発明の船舶の最適航路計算システムは、船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータを算出する船舶の最適航路計算システムにおいて、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定できる必須通過地点指定手段と、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させるアイソクロム変更手段を備えて構成される。
【0028】
この必須通過地点指定手段を備えることで、最適航路計算の対象となる航路の途中に必須通過地点(WP:Way Point:必ず通過する地点)の任意指定を組み込むことができるので、これにより、マラッカ海峡、スエズ運河、パナマ運河等の、運河や海峡の通過航路を含む航路の計算が可能となる。例えば、事前に、マラッカ海峡、パナマ運河、スエズ運河等の運河や海峡ごとに、必須通過地点を設定した任意の航路計画を準備して、これに特定の識別名(例えば、「マラッカ海峡を含んだPG〜JPN航路」等)を付けて、最適航路計算システムで使用するデータ群に事前登録することで、設定対象の航路の途中における必須通過地点を容易に指定及び設定することができ、運河及び海峡を含む、全球対応(全地球対応)での最適航路探索が可能となる。
【0029】
また、アイソクロム変更手段を備えることにより、最適航路計算の対象となる航路に合わせてアイソクロムのパラメータを可変にすることにより、航路探索の計算効率を向上させることができ、様々な海域及び航路に対しても実用的な航路探索ができるようになる。
【0030】
上記の船舶の最適航路計算システムにおいて、航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出し、前記目標必須通過地点の直前のアイソクロムの端点から前記目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する主機回転数変更手段を備えて構成すると、この風や波などの気象、海象の条件を用いて主機回転数を制御して、遭遇する気象・海象の条件によって主機回転数を最適化するロジックにより、最小燃料航路探索機能を向上できる。
【0031】
この最適化ロジックは、必須通過地点の間の航路区間を2つのフェーズに分けてそれぞれ異なる方法で主機回転数を演算することで、航路と主機回転数を同時に計算でき、しかも、計算負荷が大きくならないロジックとなる。
【0032】
この気象、海象及び海流の条件と探索する航路の条件を用いた主機回転数の変更計算が実施できるようになったのは、上記のアイソクロム変更手段を備えることで、計算時間が短縮できたことにより、2〜3回の繰り返し計算が許容されるようになったおかげであり、アイソクロム変更手段との組み合わせで始めて採用できるものである。また、数十回〜数百回の繰り返し計算は、まだ、計算能力の面から実用的ではないため、2つのフェーズに分ける最適化ロジックにより、航路と主機回転数を同時に計算でき、かつ、計算負荷が大きくならないようすることで、主機回転数を変更できる航路探索を実用的に行うことができるようになる。
【0033】
上記の船舶の最適航路計算システムにおいて、前記主機回転数変更手段が、前記第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出して、設定主機回転数に対する主機回転数の増減速の割合を演算し、この演算した増減速の割合が減速に相当する場合は、この増減速の割合に残距離を用いて演算したゲインを乗じて残距離を考慮した割合を算出し、この残距離を考慮した割合に基づいて、前記設定主機回転数と上限主機回転数と下限主機回転数から、前記第1区間を航行する際に用いる主機回転数を求め、前記第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整するように構成すると、容易に主機回転数を決定できる。
【0034】
上記の船舶の最適航路計算システムにおいて、計算対象の個々の船舶毎に、その船舶の実海域性能を加味した船型モデルを作成し、ドック入り前/後、助燃剤、低摩擦塗料、船体省エネ付加物の少なくとも一つの性能向上効果を加味して、実際の運航データを解析する個船データ加味手段を備えて構成すると、この個々の船舶毎の船体の実海域における経年変化による推進性能の劣化分や向上分のみならず、波浪中抵抗増加による推進性能への影響を加味した実海域性能データに基づいた最適航路計算が可能になり、航路選定の精度がより向上する。
【0035】
上記の船舶の最適航路計算システムにおいて、航海途中における気象、海象及び海流データの最新予報データのみならず、任意の期日・時間及び地点を起点とした気象、海象及び海流のデータを選定して航路計算を行う気象等データ選択手段を備えて構成すると、最新予報データだけでなく、任意の期日・時間及び地点を起点として、リスティングした気象・海象(風速、風向、波高、波向き、波周期)及び海流(速度、ベクトル)等の気象等データを用いて航路計算ができるので、過去の気象、海象データを用いて航路選定計算を行うこともできるようになり、航路選定の評価を向上できる。
【0036】
上記の船舶の最適航路計算システムにおいて、船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度の少なくとも一つに対して閾値を設定する閾値設定手段を備えて構成すると、これにより、波や船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度が設定された閾値を超えないような航路設定がなされるので、航海中の最大波高、最大有義波高等)、最大ピッチ角度、最大ロール角度、最大船体加速度等が設定され、これらの範囲内になる条件下で航路探索がなされるので、船体及び積載貨物の安全性を確保するための最適航路計算が可能になる。
【0037】
そして、上記の目的を達成するための本発明の船舶の運航支援システムは、船舶の運航支援を行う船舶の運航支援システムであって、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとを有して構成されると共に、前記運航モニタリングシステムは、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、前記就航船解析システムは、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、前記最適航路計算システムは、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、前記運航モニタリングシステムは、前記第4データと、気象、海象、海流の予報情報を含む第5データを入力して前記第1データを算出するように形成され、前記運航モニタリングシステムと前記就航船解析システムと前記最適航路計算システムは解析サイクルを形成するように構成された船舶の運航支援システムにおいて、前記最適航路計算システムとして、上記の最適航路計算システムを備えて構成する。
【0038】
そして、上記の目的を達成するための本発明の船舶の最適航路計算方法は、船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報と船体運動の予測情報を含むデータを算出する船舶の最適航路計算方法において、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定すると共に、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させることを特徴とする方法である。
【0039】
この方法により、必須通過地点の任意指定を組み込むことができるので、これにより、運河や海峡の通過航路を含む航路の計算が可能となり、運河及び海峡を含む全球対応での最適航路探索が可能となる。また、最適航路計算の対象となる航路に合わせて、等時間曲線法におけるアイソクロムのパラメータを可変にすることができるので、様々な海域及び航路に対しても実用的な航路探索ができるようになる。
【0040】
また、上記の目的を達成するための本発明の船舶の運航支援方法は、対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとから構成される船舶の運航支援システムの船舶の運航支援方法であって、前記運航モニタリングシステムで、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、前記就航船解析システムで、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、前記最適航路計算システムで、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、この第4データと、気象、海象、海流の予報情報を含む第5データを前記運航モニタリングシステムに入力して前記第1データを算出する船舶の運航支援方法において、上記の最適航路計算方法を用いることを特徴とする方法である。この方法によれば、上記の船舶の最適航路計算方法と同様な作用効果を奏することができる。
【発明の効果】
【0041】
本発明の船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法によれば、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算が可能となる。
【0042】
更に、主機回転数変更手段を備えると、全球を対象とした航路の最適化に際して、主機回転数を可変とした最小燃料航路の探索が可能となり、個船データ加味手段を備えると、個々の船舶毎の船体の実海域における経年変化による推進性能の劣化分や向上分のみならず、波浪中抵抗増加による推進性能への影響を加味した実海域性能データに基づいた最適航路計算が可能となる。
【0043】
また、気象等データ選択手段を備えると海流データも可変にすると共に航路のそれぞれの場所と時間に対応した任意の気象・海象及び海流データを用いて航路探索を行うことが可能となる。
【0044】
その結果、本船固有の最新の実海域特性、航海予定海域の気象、海流の影響や船体動揺をも考慮した最短時間で到着する航路の探索や、燃費最小の航路の探索を行うことが可能となる。
【図面の簡単な説明】
【0045】
【図1】本発明の実施の形態の船舶の運航支援システムの構成を示す図である。
【図2】性能診断システムを加えた場合の本発明の実施の形態の船舶の運航支援システムの構成を示す図である。
【図3】最適航路計算システムのフローを示す図である。
【図4】気象、海象状態と船速低下及びエンジン負荷の関係を示す図である。
【図5】本発明の実施の形態の最適航路計算システムの構成を示す図である。
【図6】等時間曲線法のアイソクロムのパラメータを説明するための図である。
【発明を実施するための形態】
【0046】
以下図面を参照して本発明に係る船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法の実施の形態について説明する。
【0047】
最初に、本発明の実施の形態の船舶の最適航路計算システム30を備えた本発明の実施の形態の船舶の運航支援システム1について説明する。図1に示すように、この船舶の情報処理システム1は、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30とを有して構成される。
【0048】
これらのシステム10,20,30は、コンピュータに搭載されたプログラム群で形成する。これらのプログラムが搭載されたコンピュータは、LAN又はインターネット回線等で、データベースの入出力を介して互いに連結される。
【0049】
また、データベースの記憶場所として、運航モニタリングシステム10の出力であり、かつ、就航船解析システム20の入力となる、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを記憶する第1データベース記憶装置D10を設け、就航船解析システム20の出力であり、かつ、最適航路計算システム30の入力となる、最新の推定性能の情報と最新の船体運動モデルを含む第2データを記憶する第2データベース記憶装置D20を設ける。
【0050】
更に、最適航路計算システム30の入力となる、航路で予測される気象、海象、海流の情報を含む第3データを記憶する第3データベース記憶装置D30と、最適航路計算システム30の出力であり、かつ、運航モニタリング10の入力となる、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを記憶する第4データベース記憶装置D40を設ける。また、更に、運航モニタリングシステム10の入力となる、気象、海象、海流の予報情報を含む第5データを記憶する第5データベース記憶装置D50を設ける。
【0051】
これらのデータベース記憶装置D10〜D50は個々の装置として設けてそれぞれのデータをそれぞれ1個の記憶装置に記憶してもよく、大きな記憶装置の一部として、第1〜第5のデータを同一の記憶装置に記憶しても良い。また、海象、気象、海流の情報である第3データは、海象、気象、海流のデータを商業的に配信する気象情報提供者から入手し、気象、海象、海流の予報情報である第5データも同様に入手する。この第5データは、運航モニタリングシステム10の船内情報処理システムで入手できる気象海象データとは別に得られるデータである。
【0052】
そして、運航モニタリングシステム10は、第4データベース記憶装置D40から最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データと、第5データベース記憶装置D50から気象、海象、海流の予報情報を含む第5データとを入力して、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを収集及び算出し、第1データベース記憶装置D10に出力する。
【0053】
この運航モニタリングシステム10は、船舶側の船内情報処理システムと陸上の陸側情報処理システムと、インターネット回線及び衛星通信システムからなる、これらの相互間のデータ送受信機構とを有して構成される。
【0054】
船内情報処理システムでは、航海用データと機関用データと含む運航用データの収集及び蓄積を行うと共に、船舶を管理する上で、不可欠なアブログ(ABLOG )とヌーンレポート(Noon Report )等の管理用データの作成及び管理を行う。これらの航海用データ、機関用データ、管理用データが、陸上情報処理システムに送られるが、これらの内から就航データ、風向風速データ、波高データ、積み付けデータ等の第1データを抜き出して第1データベース記憶装置D10に出力する。なお、船舶の運航に際しては、航海計画および船体運動の予測情報が必要であるので、これらの第4データを第4データベース記憶装置D40から入力する。
【0055】
陸側情報処理システムでは、ポータルサイトサーバーに設けられたデータ集積管理手段により、船内情報処理システムから送信されたデータの整理と管理を行うと共に、第1データの第1データベース記憶装置D10への出力を行う。また、この陸側情報処理システムでは、各陸上サービス利用者側に設けられた管理用コンピュータにより、蓄積されたアブログ及びヌーンレポートを閲覧及び集計ができるように構成される。また、手入力機能の拡張機能として、船内情報処理システムが収集したデータを修正できる機能も持たせ、修正の履歴を修正する前のデータと共に、第1データベース記憶装置D10に記憶できるように構成する。これにより、例えば、船舶に搭載されている温度センサ等の計測機器の経年劣化による誤計測を正すことができるようになる。
【0056】
就航船解析システム20は、第1データベース記憶装置D10から第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、第2データベース記憶装置D20に出力する。
【0057】
この就航船解析システム20は、特に燃費低減等の経済性、効率化そして地球温暖化ガス排出削減など環境負荷低減を考慮したより高度な運航支援を実現するため、対象となる船舶の実海域性能をより高精度に把握し、その実海域性能を効果的に利用できるようにするものである、また、就航船の増加による実績データの管理を簡単かつ有効活用できる機能も提供する。
【0058】
この就航船解析システム20では、水槽試験データおよび実績のある解析手法を基礎とした船舶性能推定技術を応用し、就航実績データとの相互リンクを併用することで対象船舶の実海域における実力性能の評価を高精度に行い最適航路計算システム30との連携で、対象船舶の経済性向上と環境負荷低減を考慮した運航管理支援機能をもたらすものである。なお、確率密度評価、潮流影響評価、主機特性、意図的な船速低下などの人的影響を考慮できるようにすることがより好ましい。
【0059】
この就航船解析システム20は、ポータルサイトサーバーに接続しているシステムであり、図1に示すように、第1データベース記憶装置D10から就航データ、風向風速データ、波高データ、積み付けデータ等の第1データを入力して、就航船解析計算プログラムにより、豊富な水槽試験と実績のある解析技術をベースとした船体運動モデルを採用した解析・推定エンジンで自動計算して、最新推定性能情報と最新船体運動モデル等を含む第2データを算出し、第2データベース記憶装置D20に出力する。
【0060】
これにより、対象船舶の就航実績データを基にした就航船解析と理論解析に基づいた実海域性能推定との相互リンクにより実海域における性能評価を高精度で行い、対象船舶の就航状況の確認と実力の把握、契約速力およびバンカー契約などの採算計算の支援、地球温暖化ガス排出量の把握、将来の性能状況予測に結び付ける。
【0061】
最適航路計算システム30は、第2データベース記憶装置D20から第2データを、また、それとともに、第3データベース記憶装置D30から航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、第4データベース記憶装置D40に出力する。
【0062】
この航海計画および船体運動の予測情報を含む第4データを実船の航海に取り入れて、その計画に基づいて、あるいは修正された計画に基づいて、実海域での航海用データや実船計測データ等を運航モニタリングシステム10で収集及び蓄積を行う。
【0063】
これらのサイクルを何回か経て、次のデータを得ることができる。データ統計解析結果として、就航情報、海象状況、速力状況、馬力状況、燃費状況、回転数状況等のデータを得られ、就航状況を確認できる。また、実海域性能推定・評価のデータとして、シーマージン解析、船速低下解析、平均燃料消費率解析(FOC解析)、モード解析等のデータが得られ、これらのデータは契約速力、バンカー契約の採算計算に活用することができる。
【0064】
また、船体・プロペラ汚損影響などの性能悪化要因として、回転数変化、平均燃料消費率変化、馬力変化、船速変化等のデータが得られ、ドック入りやメンテナンスの修繕計画に活用できる。
【0065】
更に、好ましくは、図2に示すように、性能診断(健康診断)システム40を備えて形成され、この性能診断システム40が、運航モニタリングシステム10によって収集され、第1データベース記憶装置D10に記憶された第1データの内の就航データを入力して船体と機器の経年変化予測や余寿命診断を行って、推定性能経年変化シミュレーションとしての経年変化推定データや主機の余寿命診断等の第6データを算出し、第6データベース記憶装置D60に出力するように構成する。
【0066】
この性能診断システム40を備えた場合には、この性能診断システム40は、運航モニタリングシステム10によって収集され、第1データベース記憶装置D10に記憶された第1データの内の就航データを入力して船体と機器の経年変化予測を行って、推定性能経年変化シミュレーションとしての経年変化推定データや主機の余寿命診断等の第6データを算出し、第6データベース記憶装置D60に出力する。
【0067】
なお、この性能診断システム40の演算と就航船解析システム20の演算との間に共通する部分がある時は、適宜その結果を互いに利用できるように構成する。また、この経年変化推定データや主機の余寿命診断等の第6データを、最適航路計算システム30で利用することにより、最適航路計算の精度を向上できる場合もあるので、第6データを最適航路計算システム30に入力できるように構成する。
【0068】
この船舶の運航支援システム1では、対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30を使用して、運航モニタリングシステム10で、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを収集し、就航船解析システム20で、第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、最適航路計算システム30で、第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、この第4データと、気象、海象、海流の予報情報を含む第5データとを運航モニタリングシステム10に入力して第1データを算出する。これにより、計測、解析、航路選定のサイクルを形成する。
【0069】
例えば、対象船舶の本船上で計測・収集されたデータを就航船解析システム20の就航船解析プログラムで計算し、対象船舶の実海域の性能を推定し、この出力結果を、モード解析結果としてユーザーに提供すると共に、この推定性能を最適航路計算システム30に送り、最適航路計算プログラムで、気象・海象及び海流の予報情報を基にCO2排出量最小の航路を推定する。この運航計画を運航モニタリングシステム10の船内情報処理システムに送り、実航海にフィードバックする。
【0070】
また、例えば、舶用ディーゼルエンジン主機関向け、遠隔診断サービスを利用中のユーザーに対して、就航船解析システム20で船体全体の性能と主機関の性能を同時に推定・評価でき、その結果を最適航路計算に反映する。
【0071】
次に、本発明に係る実施の形態の最適航路計算システム30の特徴について説明する。この最適航路計算システム30は、図1及び図2に示すように、データベース記憶装置D20からの最新の推定性能情報と最新の船体運動モデルを含む第2データと、第3データベース記憶装置D30からの気象、海象、海流情報の第3データを入力し、燃料消費量最小航路計算と船体動揺対応航路計算を行って、航海計画と船体運動を算出し、これらの第4データを第4データベース記憶装置D40に出力するシステムである。
【0072】
図3に最適航路計算システム30における制御のフローを示す。この最適航路計算では、最新の海流情報や船の現在位置、目的地への到達予定日を基に、航路や船舶のエンジン性能等の基本情報を用いて、船舶の位置やその付近の海流、気圧などから最適な速度を計算する。
【0073】
最適航路計算システム30では、対象となる船舶毎の船体運動の特性と気象・海象条件を考慮して最適航路の計算を行う。この船体運動の特性は就航船解析システム20の出力データを用いる。このデータを用いて、航海時間を最短とする最適航路を計算する。なお、最適化の評価関数として、航海時間、燃料消費量、船体運動等を用いることができる。
【0074】
最適航路計算システム30では、図3のステップS31で、気象・海象データを取得する。この気象・海象データは、気象情報提供者、例えば、日本気象協会のデータ配信サービスから、日本近海の詳細なデータである沿岸波浪GPVは12時間毎に、全球波浪GPVデータは24時間毎に入手する。ステップS32で、これらの気象・海象データを表示する。つまり、風況表示画面等で気象データを画面表示し、波浪表示画面等で海象データを画面表示する。
【0075】
ステップS33で船速・BHP(エンジン出力)計算を行い、ステップS34で就航船解析システム20で算出した運動特性のデータを取得する。ステップS35で最適航路を計算する。ステップS36でこの計算結果を表示する。例えば、最適航路計算画面で計算した航路と選定した最適航路と大圏航路を表示する。また、選定した最適航路と大圏航路に関して気象・海象の風速・有義波高と共に、動揺表示画面等で船体運動(例えば、ロール有義値、ピッチ有義値、船首加速度有義値)を、燃料消費量表示画面等で燃料消費量を、航海時間ベース等で表示する。
【0076】
ここで、最適航路計算について説明する。船舶が大洋を航海する場合、低気圧の北側を航行するか南側を航行するかで、気象・海象の影響が大きく異なる。プロペラ回転数一定で、西向きに航行する場合を考えると、図4に示すように、低気圧の北側を航行するときには、追い風、追い波の状態での航行となり、船速の低下量は少なく、エンジンの負荷も小さくなり、燃料消費量が少なくなる。
【0077】
一方、低気圧の南側を航行するときには、強い向かい風、向かい波の状態での航行となり、船速が著しく低下し、エンジンの負荷が増大し、燃料消費量が多くなる。特に冬季北太平洋を西航する場合は、大圏航路付近を発達した低気圧が通過することにより、大圏航路付近から南側の広い範囲において向かい風、向かい波が卓越した状態になることが多い。
【0078】
船速はエンジンの出力の1/3乗に比例するため、エンジン出力を±30%調整しても、船速は±10%しか変動しない。この程度の船速の調整では、太平洋の気象・海象状況というスケールにおいて低気圧の南側の大波高域を避ける、あるいはより有利な状態の海域を航行することは困難である。
【0079】
そこで、大洋でよりよい状態の海域を航行するためには、まずは航路の選定が重要となる。出港前に、最新の気象・海象予報を利用して、高い向かい波を受けず、船速の低下量が小さくなるような航路を選択する。そして、航行中においては、更新される気象・海象予報を用いて常によりよい航路を選定し直す。
【0080】
最適航路を求めるには、膨大な量の気象、海象及び海流データだけでなく、船舶の耐航性能データも活用して最適航路計算を行う。まず、最適航路を求めるという問題を定式化し、最適化のための評価基準を数式で表現する。この最適航路選定問題を解くための最適化の手法としての最適化計算アルゴリズムには、変分法、ダイナミックプログラミング、等時間曲線法(Isochrone Method)、及び、多目的遺伝的アルゴリズムなどを使用することができるが、ここでは、計算時間の負荷及び計算の収束性を考慮して等時間曲線法を用いる。
【0081】
この等時間曲線法は、発散や計算結果が得られない様なことが生じない、安定した計算結果が得られる方法であり、全球対応(全地球対応)の最短時間航路の計算に用いる最適化計算に向いている。設定された通過地点間の航路区間をLegとすると、例えば第1通過地点P1と第2通過地点P2の間は第1航路区間Leg1となり、第2通過地点P2と第3通過地点P3の間は第2航路区間Leg2となるように定義して、航路計算は航路区間Leg毎に行う。この等時間曲線法では、出発地から一定時間後で到達し得る領域の外側境界を等時間曲線と言い、これらを逐次求めて最短時間航路を決定する。
【0082】
次に、本発明に係る実施の形態の最適航路計算システム30における本発明の特徴について説明する。図5に示すように、この最適航路計算システム30は、航行方法設定手段31、必須通過地点指定手段32、アイソクロム変更手段33、主機回転数変更手段34、個船データ加味手段35、気象等データ選択手段36、閾値設定手段37等の新たな手段を備えて構成される。
【0083】
航行方法設定手段30は、最適航路の計算に際しての航行方法を選択して設定するための手段である。この航行方法とは、航路区間を航行する際の最短時間で航行可能となる航行方法(最短時間航路:主機回転数一定)、最短距離で結ぶ航行方法(大圏航路)、沿岸航行や航路内などに用いる方位を一定にして航行するラムライン航法などを示し、図5に例示する。
【0084】
一般的に航路計画を行う場合には、航路、運河及び海峡など必然的に航路が決まる場合や、治安などの要因によって航行海域を選択する場合が考えられる。この様なことに対応するために、選択された航行海域の航行区間における航行方法を選択して設定できるように、航行方法を選択して航路探索計算モードを指定できるようにする。
【0085】
必須通過地点指定手段32は、設定対象の航路の途中において必須通過地点(WP:Way Point:必ず通過する地点)を任意に指定できるようにする手段であり、この必須通過地点指定手段30を備えることで、最適航路計算の対象となる航路の途中に必須通過地点を任意に指定して組み込むことができる。この必須通過地点の設定は手動で行うように構成してもよく、予め、航路の出入ロなどに固定必須通過地点を設定しておき、航路設定の際にその必須通過地点を用いるように構成してもよい。
【0086】
これにより、マラッカ海峡、スエズ運河、パナマ運河等の、運河や海峡の通過航路を含む様々な海域及び航路における計算が可能となり、実用的な航路探索が可能となる。例えば、事前に、マラッカ海峡、パナマ運河、スエズ運河等の運河や海峡ごとに、必須通過地点を設定した任意の航路計画を準備して、これに特定の識別名(例えば、「マラッカ海峡を含んだPG〜JAPAN航路」等)を付けて、最適航路計算システムで使用するデータ群に事前登録することで、設定対象の航路の途中における必須通過地点を容易に指定及び設定することができる。その結果、運河及び海峡を含む、全球対応(全地球対応)での最適航路探索が可能となる。
【0087】
このアイソクロム変更手段33は、必須通過地点の間の距離によって等時間曲線法で用いるアイソクロム(Isochrone)の間隔と探索範囲を変化させる手段であり、このアイソクロム変更手段33により、最適航路計算の対象となる航路の探索する航路区間に合わせて、等時間曲線法におけるアイソクロムのパラメータを可変にする。その結果、様々な海域及び航路に対しても実用的な航路探索ができるようになる。
【0088】
このアイソクロム変更手段33を用いる等時間曲線法による計算では、最適な探索長さと探索間隔(アイソクロムの間隔)や探索範囲を自動で選択して最適化を行うロジックを備え、航海時間を指定し、適当な主機回転数を設定すると、等時間曲線法を用いて最短時間航路とその航海時間を算出するように構成される。この探索長さと探索間隔と探索範囲は、手動入力にしてもよいが、航路途中に指定された必須通過地点の間の航路区間の距離により自動的に最適選定するように構成することが好ましい。
【0089】
必須通過地点間距離によって、最適な探索長さと探索間隔と探索範囲を自動で選択して、最適化を行うロジックとして、図6に示すような、アイソクロムの長さ(Span)、間隔(deg.)、範囲(deg.)、距離評価範囲(解像度)(Mile)を、必須通過地点間距離によって、又は、必須通過地点間で設定された主機回転数に対応する船速で航行した際に係る時間によって、例えば、近距離用(Near)、中距離用(Middle)、遠距離用(Long)の3段階で切り替えるようにして、更に、出発点とそれ以外の点での間隔と範囲を別々に設定できるように構成する。
【0090】
必須通過地点間距離によるアイソクロムのパラメータの切換えは、実際には設定したデフォルトの主機回転数で、設定した時間(24h、12h、6h等)で航行可能な距離で定義することによって、対象船の設定した主機回転数によって船速が変化した場合にも対応できる。また、航路探索時の計算時間を短縮できるように、アイソクロムパラメータと同様に必須通過地点間距離によって、船速計算間隔(hour)も切換えるようにする。更に、これらの設定パラメータは、全て設定ファイルを編集することによってパラメータを変更できるようにする。
【0091】
このアイソクロムのパラメータを可変にした効果を確認するために、ある供試船で、シンガポールと日本の間の航路で、アイソクロムの長さ(Span)を6h(時間)、12h、24hに切換えてシミュレーションを実施した。その計算結果の航路を見てみると、6hでは、この時期に黒潮を避けて多くの船舶が選択しているのと同じ航路となり、島と島の間を通過して沖縄の西側を航行する航路となっている。一方、12h及び24hでは、島と島の間を通過しないで、沖縄の太平洋側の最短ルートとなっている。そして、6hの航路では、12h及び24hの航路と比較して、燃料消費量が約0.5%少なくなっていることが分かった。
【0092】
これらの結果から、島が点在する海域や陸地に囲まれた航路に対して、アイソクロムを展開するパラメータを可変にすることによって、より実用的な航路を探索できることが確認できた。また、長い航路でも航路探索に使用する計算時間が10分程度で終了するようになると同時に、短い航路の場合は細かく計算するので、良好な計算結果が得られ、しかもそれに要する計算時間を短縮できた。
【0093】
主機回転数変更手段34は、目的地の指定と、到達時間の指定を受けて、最小燃料航行方法による航路探索に関係する手段であり、この最小燃料航行方法では、船舶が運航される際に運航者が船速または主機回転数を決定するプロセスに注目し、主機回転数を決定するプロセスを使用する。この気象、海象及び海流条件を用いた主機回転数の制御のロジックは、以下のようなものである。
【0094】
海象が悪く荒れている時は、主機がトルクリッチになりトリップすることを避けるようにするため、船速を落とす。また、海象が穏やかな時は、船舶の目的地への到着時間をキープするための余裕時間を確保するために船速を上げる。また、向かい風が強い時は減速し、追い風の時には増速する。更に、残りの航海時間が多いときには、減速しすぎると到達時間をキープできなくなるため、減速量を抑える傾向にする。
【0095】
これらのロジックで確保した余裕時間を用いて、残りの航海時間(航海距離)がすくなくなると、現在の船速と距離から到達時間を推定することが容易になるため、予定した時間に到着点に到着するように、船速又は主機回転数を調整する。
【0096】
この第1区間の前期段階と第2区間の後期段階の2つのフェーズに分けてそれぞれ異なる方法で主機回転数を演算する最適化のロジックを用いることで、航路と主機回転数を同時に計算でき、かつ、計算負荷が過剰にならないロジックとすることができる。その結果、短時間での航路検索が可能となる。
【0097】
主機回転数変更手段34は、航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出し、目標必須通過地点の直前のアイソクロムの端点から目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する。
【0098】
より具体的には、主機回転数変更手段34は、航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を気象、海象のデータ、即ち、波高、波向き、波周期、相対風速と海流によって算出して、設定主機回転数に対する主機回転数の増減速の割合(主機回転数を操作する割合(±1.0で定義))を演算し、この演算した増減速の割合が減速に相当する場合は、この増減速の割合に残距離を用いて演算したゲインを乗じて残距離を考慮した割合を算出し、この残距離を考慮した割合に基づいて、設定主機回転数と上限主機回転数と下限主機回転数から、第1区間を航行する際に用いる主機回転数を求め、残りの最終アイソクロムの端点から目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する。
【0099】
この主機回転数変更手段34により、風速、風向、波高、波向き、波周期、海流等の気象、海象及び海流の条件を用いて主機回転数を制御して、設定航路において遭遇する気象、海象及び海流に応じて主機回転数を最適化するので、最小燃料航路探索機能を向上できる。つまり、従来技術の最小燃料航路は、主機回転数を一定にしてしか計算できなかったが、気象、海象及び海流の条件を用いて主機回転数を可変にする機能を持たせる。
【0100】
また、船体運動を推定するためには、船体まわりの流場を求めることが必要となる。船体は細アナ外形状をしているため、まず船体各断面の2次元問題として流場を解いて2次元流体力を求め、次にこの2次元流体力をベースとして船体の3次元流体力を求めるいわゆるストリップ法が有効であり、実用的な評価が得られている。
【0101】
まず、船体運動計算システム(SCS:Ship-motion Calculation System)で流体力を計算し、各波向き、波周期毎の船体運動を予め計算し、船体運動のデータベースを作成する。時々刻々の波浪から船体運動を計算するには、船体運動のデータベースを基にして、海象データから船体運動を計算する。これにより、種々の船舶に対して運動計算を容易に行うことが可能となり、サービス対象船語の性能を評価することができる。
【0102】
気象等データ選択手段36は、航海途中における気象、海象及び海流データ(以下、気象等データ)の最新予報データのみならず、任意の期日・時間及び地点を起点とした気象等データを選定して航路計算を行う手段であり、この気象等データ選択手段により、最新予報データだけでなく、任意の期日・時間及び地点を起点として、リスティングした気象・海象(風速、風向、波高、波向き)及び海流(速度、ベクトル)等のデータを用いて航路計算ができるので、過去の気象等データを用いて航路選定計算を行うこともできるようになる。その結果、航路選定の評価を向上できる。
【0103】
つまり、従来技術では、海流は一航海中に大きな変化は無いとして、海流データの時間軸での補間機能を設けずに、一定としていたが、補間機能を設けることで、異なる時刻の海流データも用いることができるようにする。この補間機能により、複数の時間の海流データを読み込み、任意の時間間隔に対応した海流の情報を算出できるようになる。
【0104】
また、現在時間と出航時間を参照して、最新の気象等データリスト作成機能を呼び出す機能を設けたり、気象等データリストファイルを参照して、気象等データを読み込む機能を追加したりする。また、気象等データリストファイルから読み込んだ経過時間を用いて、任意の時間間隔の気象等データに対応した最適航路計算を行えるようにする。
【0105】
より具体的には、従来技術では一つの気象等データのみに対応していたソルバーモジュールを、気象等データリストファイルを参照し、複数の時間のから気象等データ読み込み、任意の時間間隔の気象等データに対応する演算機能を追加する。更に、最新の気象等データの予測データが転送されるのを監視し、転送されてきたデータを受信すると同時に処理して、データベース用の形式に変換してデータベースに記憶すると共に、最適航路計算システム30の表示用データベースに登録するデータ管理システムを設け、このデータ管理システムから最適航路計算システム30の表示用データベースにデータを出力して表示するようにする。
【0106】
なお、最適航路計算システム30から気象等データをダウンロードする際に、気象等データの受信やユーザーへのデータ点素に影響を与えないようにするために、帯域制御機能を付加したFTPサーバーを設ける。これにより、現在時間と出航時間等の設定した計算条件に対して、保持及び記憶している気象等データのデータベースを参照して航路探索に用いる最適な気象等データのリストを作成し、このリストの最適の気象等データを選択して、航路探索用のデータとして読み込んで、航路探索計算をする。言い換えれば、設定した計算条件と保持している気象等データを確認して、計算に用いる気象等データのリストを作成するプリリストシステムと、この作成された高精度な気象等データのリスト用いて、航路検索を行う。
【0107】
その結果、航海途中における気象等データの最新予報データのみならず、過去の現状予測データ、架空のデータ等の多くの様々なデータによる航路探索が可能となり、気象等データの時刻にとらわれない航路探索が可能になる。
【0108】
この気象、海象データの例としては、気象庁より1日4回GPV(Grid Point Value)データで配信されている全球モデル予報値のうちの全球数値予報モデル(GSM)のGPVデータと全球波浪数値予報モデル(GWM)GPVデータの2種類のデータがある。このGPVデータは、0.5度間隔の緯度経度の交点の値の予測値である。また、海流データとしては、パイロットチャート(Pilot Chart)から読み込んだデータ、及び独立行政法人海洋研究開発機構で開発された海流予測情報利用LLPより配信される海流情報がある。
【0109】
閾値設定手段37は、船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度に対して閾値を設定する手段であり、この閾値設定手段37により、船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度が設定された閾値を超えないような航路設定がなされるので、航海中の波高、ピッチ角度、ロール角度、船体加速度等が設定された閾値内になり、船体及び積載貨物の安全性を確保するための最適航路計算が可能になる。つまり、この船体動揺に対する閾値を設定することで積載貨物へのダメージを軽減できる。
【0110】
なお、この最適航路計算システム30で用いる入出力ファイル名、気象等データのリストファイル名、また、アイソクロムのパラメータ等を設定ファイルから読み込むように構成し、様々な検討及びサービス運用に柔軟に対応できるようにする。
【0111】
また、計算用のデータや計算結果の表示はグラフィカルな表示とすることが好ましく、航路計算結果に、気象、海象及び海流データを重畳表示したり、船体動揺、船速、燃費、航続時間、距離を表やグラフ表示したりする。なお、現在の航行位置は、運航データ収集システムである運航モニタリングシステム10からのデータを表示する。
【0112】
上記の船舶の最適航路計算システム30によれば、ペルシャ湾と日本との間、日本とオーストラリアの間、シンガポールと地中海との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算が可能となる。更に、全球を対象とした航路の最適化に際して、主機回転数を可変とした最小燃料航路の探索、個々の船舶毎の船体の実海域における経年変化による推進性能の劣化分や向上分のみならず、波浪中抵抗増加による推進性能への影響を加味した実海域性能データに基づいた最適航路計算、気象等データ選択手段を備えると海流データも可変にすると共に航路のそれぞれの場所と時間に対応した任意の気象・海象及び海流データを用いて航路探索等が可能となる。
【0113】
その結果、本船固有の最新の実海域特性、航海予定海域の気象、海流の影響や船体動揺をも考慮した最短時間で到着する航路の探索や、燃費最小の航路の探索を行うことが可能となる。
【0114】
また、最短時間航路探索モード、到着時間指定での燃料最小航路探索モードの指定により、IMO(国際海事機関)規則のSEEMP(船舶エネルギー効率マネジメントプラン)/EEOI(新造船エネルギー効率設計指針)への対応を支援できる。例えば、大圏航路と比較して約10%の燃費削減ルートを探索できる。また、実運行の航路と比較した後解析が可能となる。
【0115】
そして、本発明に係る実施の形態の船舶の最適航路計算方法では、船舶の推定性能の情報と船体運動モデルを含むデータD20と、設定対象の航路で予測される気象、海象、海流の情報を含むデータD30を入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータD40を算出する船舶の最適航路計算方法において、最適航路を求める最適化の手法として等時間曲線法を採用すると共に、設定対象の航路の途中において必須通過地点(WP)を任意に指定すると共に、必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させる。この方法により、上記の船舶の最適航路計算システム30と同様な作用効果を奏することができる。
【0116】
また、本発明に係る実施の形態の船舶の運航支援システム1は、船舶の運航支援を行う船舶の運航支援システムであって、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30とを有して構成されると共に、運航モニタリングシステム10は、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データD10を算出し、就航船解析システム20は、第1データD10を入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データD20を算出し、最適航路計算システム30は、第2データD20と、航路で予測される気象、海象、海流の情報を含む第3データD30を入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データD40を算出し、運航モニタリングシステム10は、第4データD40と、気象、海象、海流の予報情報を含む第5データD50を入力して第1データD10を算出するように形成され、運航モニタリングシステム10と就航船解析システム20と最適航路計算システム30は解析サイクルを形成するように構成されると共に、上記の最適航路計算システム30を備えて構成される。この上記の最適航路計算システム30を備えることにより、上記の最適航路計算システム30と同様の効果を奏することができる。
【0117】
そして、本発明に係る実施の形態の船舶の運航支援方法では、対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステム10と、対象船舶の航行中の実海域における性能の解析を行う就航船解析システム20と、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システム30とから構成される船舶の運航支援システム1の船舶の運航支援方法であって、運航モニタリングシステム10で、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データD10を算出し、航解析システム20で、第1データD10を入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データD20を算出し、最適航路計算システム30で、第2データD20と、航路で予測される気象、海象、海流の情報を含む第3データD30を入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データD40を算出し、この第4データD40と、気象、海象、海流の予報情報を含む第5データD50を運航モニタリングシステム10に入力して第1データD10を算出する船舶の運航支援方法において、上記の最適航路計算方法を用いる。この方法により、上記の船舶の運航支援システム1と同様な作用効果を奏することができる。
【産業上の利用可能性】
【0118】
上記の船舶の最適航路計算システム、船舶の運航支援システム、船舶の最適航路計算方法、及び船舶の運航支援方法は、ペルシャ湾とマラッカ海峡を挟んだ日本との間、日本とオーストラリアの間、シンガポールとスエズ運河を挟んだ地中海との間、日本とパナマ運河を挟んだ北米東岸との間等の、運河や海峡を挟んだ航路にも対応でき、全球対応の最適航路計算ができるので、多くの船舶における最適航路計算システム、運航支援システム、最適航路計算方法、及び船舶の運航支援方法として利用することができる。
【符号の説明】
【0119】
1 船舶の運航支援システム
10 運航モニタリングシステム
20 就航船解析システム
30 最適航路計算システム
31 航行方法設定手段
32 必須通過地点指定手段
33 アイソクロム変更手段
34 主機回転数変更手段
35 個船データ加味手段
36 気象等データ選択手段
37 閾値設定手段
40 性能診断システム
D10 第1データベース記憶装置
D20 第2データベース記憶装置
D30 第3データベース記憶装置
D40 第4データベース記憶装置
D50 第5データベース記憶装置
D60 第6データベース記憶装置
【特許請求の範囲】
【請求項1】
船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータを算出する船舶の最適航路計算システムにおいて、
最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定できる必須通過地点指定手段と、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させるアイソクロム変更手段を備えたことを特徴とする船舶の最適航路計算システム。
【請求項2】
航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出し、前記目標必須通過地点の直前のアイソクロムの端点から前記目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する主機回転数変更手段を備えたことを特徴とする請求項1に記載の船舶の最適航路計算システム。
【請求項3】
前記主機回転数変更手段が、前記第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出して、設定主機回転数に対する主機回転数の増減速の割合を演算し、
この演算した増減速の割合が減速に相当する場合は、この増減速の割合に残距離を用いて演算したゲインを乗じて残距離を考慮した割合を算出し、この残距離を考慮した割合に基づいて、前記設定主機回転数と上限主機回転数と下限主機回転数から、前記第1区間を航行する際に用いる主機回転数を求め、
前記第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整することを特徴とする請求項1又は2に記載の船舶の最適航路計算システム。
【請求項4】
計算対象の個々の船舶毎に、その船舶の実海域性能を加味した船型モデルを作成し、ドック入り前/後、助燃剤、低摩擦塗料、船体省エネ付加物の少なくとも一つの性能向上効果を加味して、実際の運航データを解析する個船データ加味手段を備えたことを特徴とする請求項1〜3のいずれか1項に記載の船舶の最適航路計算システム。
【請求項5】
航海途中における気象、海象及び海流データの最新予報データのみならず、任意の期日・時間及び地点を起点とした気象、海象及び海流のデータを選定して航路計算を行う気象等データ選択手段を備えたことを特徴とする請求項1〜4のいずれか1項に記載の船舶の最適航路計算システム。
【請求項6】
船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度の少なくとも一つに対して閾値を設定する閾値設定手段を備えたことを特徴とする請求項1〜5のいずれか1項に記載の船舶の最適航路計算システム。
【請求項7】
船舶の運航支援を行う船舶の運航支援システムであって、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとを有して構成されると共に、
前記運航モニタリングシステムは、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、
前記就航船解析システムは、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、
前記最適航路計算システムは、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、
前記運航モニタリングシステムは、前記第4データと、気象、海象、海流の予報情報を含む第5データを入力して前記第1データを算出するように形成され、前記運航モニタリングシステムと前記就航船解析システムと前記最適航路計算システムは解析サイクルを形成するように構成された船舶の運航支援システムにおいて、
前記最適航路計算システムとして、請求項1〜6のいずれか1項に記載の最適航路計算システムを備えることを特徴とする船舶の運航支援システム。
【請求項8】
船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータを算出する船舶の最適航路計算方法において、
最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定すると共に、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させることを特徴とする船舶の最適航路計算方法。
【請求項9】
対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとから構成される船舶の運航支援システムの船舶の運航支援方法であって、
前記運航モニタリングシステムで、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、前記就航船解析システムで、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、前記最適航路計算システムで、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、この第4データと、気象、海象、海流の予報を含む第5データを前記運航モニタリングシステムに入力して前記第1データを算出する船舶の運航支援方法において、
請求項8記載の最適航路計算方法を用いることを特徴とする船舶の運航支援方法。
【請求項1】
船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータを算出する船舶の最適航路計算システムにおいて、
最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定できる必須通過地点指定手段と、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させるアイソクロム変更手段を備えたことを特徴とする船舶の最適航路計算システム。
【請求項2】
航路探索を開始する必須通過地点から、目標必須通過地点の直前のアイソクロムの端点までの第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出し、前記目標必須通過地点の直前のアイソクロムの端点から前記目標必須通過地点までの第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整する主機回転数変更手段を備えたことを特徴とする請求項1に記載の船舶の最適航路計算システム。
【請求項3】
前記主機回転数変更手段が、前記第1区間を航行する際の主機回転数を波高、波向き、波周期、相対風速と海流によって算出して、設定主機回転数に対する主機回転数の増減速の割合を演算し、
この演算した増減速の割合が減速に相当する場合は、この増減速の割合に残距離を用いて演算したゲインを乗じて残距離を考慮した割合を算出し、この残距離を考慮した割合に基づいて、前記設定主機回転数と上限主機回転数と下限主機回転数から、前記第1区間を航行する際に用いる主機回転数を求め、
前記第2区間は、残距離と設定時間までの残時間を用いて主機回転数を調整することを特徴とする請求項1又は2に記載の船舶の最適航路計算システム。
【請求項4】
計算対象の個々の船舶毎に、その船舶の実海域性能を加味した船型モデルを作成し、ドック入り前/後、助燃剤、低摩擦塗料、船体省エネ付加物の少なくとも一つの性能向上効果を加味して、実際の運航データを解析する個船データ加味手段を備えたことを特徴とする請求項1〜3のいずれか1項に記載の船舶の最適航路計算システム。
【請求項5】
航海途中における気象、海象及び海流データの最新予報データのみならず、任意の期日・時間及び地点を起点とした気象、海象及び海流のデータを選定して航路計算を行う気象等データ選択手段を備えたことを特徴とする請求項1〜4のいずれか1項に記載の船舶の最適航路計算システム。
【請求項6】
船体動揺に関して、波高、ピッチ角度、ロール角度、船体加速度の少なくとも一つに対して閾値を設定する閾値設定手段を備えたことを特徴とする請求項1〜5のいずれか1項に記載の船舶の最適航路計算システム。
【請求項7】
船舶の運航支援を行う船舶の運航支援システムであって、対象船舶の機器と船体運動に関してデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとを有して構成されると共に、
前記運航モニタリングシステムは、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、
前記就航船解析システムは、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、
前記最適航路計算システムは、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、
前記運航モニタリングシステムは、前記第4データと、気象、海象、海流の予報情報を含む第5データを入力して前記第1データを算出するように形成され、前記運航モニタリングシステムと前記就航船解析システムと前記最適航路計算システムは解析サイクルを形成するように構成された船舶の運航支援システムにおいて、
前記最適航路計算システムとして、請求項1〜6のいずれか1項に記載の最適航路計算システムを備えることを特徴とする船舶の運航支援システム。
【請求項8】
船舶の推定性能の情報と船体運動モデルを含むデータと、設定対象の航路で予測される気象、海象、海流の情報を含むデータを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含むデータを算出する船舶の最適航路計算方法において、
最適航路を求める最適化の手法として等時間曲線法を採用すると共に、前記設定対象の航路の途中において必須通過地点を任意に指定すると共に、前記必須通過地点の間の距離によって等時間曲線法で用いる探索長さと探索間隔と探索範囲を変化させることを特徴とする船舶の最適航路計算方法。
【請求項9】
対象船舶の機器と船体運動に関してリアルタイムでデータ収集を行う運航モニタリングシステムと、対象船舶の航行中の実海域における性能の解析を行う就航船解析システムと、船舶の航行海域の気象、海象、海流の情報を基に最適な航路を計算する最適航路計算システムとから構成される船舶の運航支援システムの船舶の運航支援方法であって、
前記運航モニタリングシステムで、運航時の就航データ、風向風速データ、波高データ、積み付けデータを含む第1データを算出し、前記就航船解析システムで、前記第1データを入力して、実海域における船舶の性能を解析して最新の推定性能の情報と最新の船体運動モデルを含む第2データを算出し、前記最適航路計算システムで、前記第2データと、航路で予測される気象、海象、海流の情報を含む第3データを入力して、最適航路に関する航海計画の情報および船体運動の予測情報を含む第4データを算出し、この第4データと、気象、海象、海流の予報を含む第5データを前記運航モニタリングシステムに入力して前記第1データを算出する船舶の運航支援方法において、
請求項8記載の最適航路計算方法を用いることを特徴とする船舶の運航支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−104690(P2013−104690A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246766(P2011−246766)
【出願日】平成23年11月10日(2011.11.10)
【特許番号】特許第4934756号(P4934756)
【特許公報発行日】平成24年5月16日(2012.5.16)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【特許番号】特許第4934756号(P4934756)
【特許公報発行日】平成24年5月16日(2012.5.16)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
[ Back to top ]