
船舶用自動操舵装置
【課題】操舵機の飽和状態を回避しつつ、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置を提供する。
【解決手段】計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部30と、推定潮流成分を、参照方位発生部30で出力する参照方位に基づき座標変換を行う座標変換部40と、座標変換部40で座標変換された潮流速度成分から潮流に対抗する斜航角βdを求める潮流修正部42と、参照方位ψRにするための参照舵角δRと斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部46と、推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部28と、を備える。参照方位発生部30は、参照舵角δRが舵角設定部28で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生する。
【解決手段】計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部30と、推定潮流成分を、参照方位発生部30で出力する参照方位に基づき座標変換を行う座標変換部40と、座標変換部40で座標変換された潮流速度成分から潮流に対抗する斜航角βdを求める潮流修正部42と、参照方位ψRにするための参照舵角δRと斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部46と、推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部28と、を備える。参照方位発生部30は、参照舵角δRが舵角設定部28で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航路制御系の船舶用自動操舵装置に関し、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置に関する。
【背景技術】
【0002】
船舶用自動操舵装置は、舵角を制御して設定方位に船首方位を追従させる方位制御系(HCS: Heading Control System)と、計画航路に船体位置を追跡させる航路制御系(TCS:Track Control System)とに分けられる。マイクロチップの高機能化、衛星測位システム(GNSS:Global Navigation Satellite System)の小型化・低コスト化・高精度化により位置情報が簡単に得られるようになったことに伴い、航路制御系の要求が高まっている。
【0003】
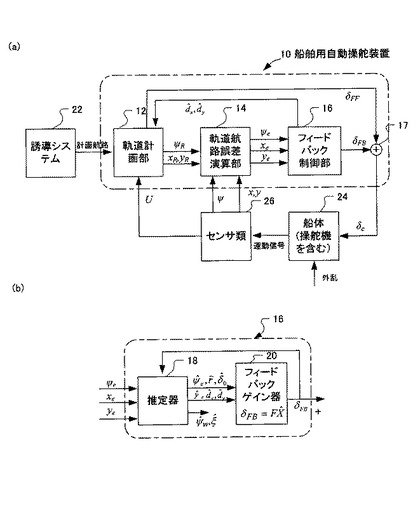
一般的な航路制御系の船舶用自動操舵装置は、図1に示すように軌道計画部12、軌道航路誤差演算部14、フィードバック制御部16及び加算器17を備える。誘導システム22からの計画航路に基づき軌道計画部12が出力する参照方位ψRと参照位置xR、yRと、センサから検出される方位ψと位置x、yとの誤差を軌道航路誤差演算部14が求める。フィードバック制御部16は、主として保針時にその誤差から船体の方位と位置とを追跡させるべくフィードバック舵角δFBを出力する。航路制御系のフィードバック制御系の制御時定数は方位制御系の制御時定数より長く、且つ、旋回時間は方位制御系の時定数より通常短いので、旋回で生じた航路誤差は、旋回中にフィードバック制御系で収斂させることは難しい。よって、旋回時には軌道計画部12からフィードフォワード舵角δFFが出力される。加算器17は、フィードバック舵角δFBとフィードフォワード舵角δFFとを加算して指令舵角δCを船体24の操舵機に出力する。計画航路は、直線と円弧の曲線とから定められる。
【0004】
旋回時には、船体に印加する潮流成分は船首方位によって変化するために、潮流成分を考慮しないと、航路誤差が過渡的に生じることになる。
【0005】
そこで、本願発明者は、特許文献1、非特許文献1及び特許文献2で提案する、方位制御系において、船首方位を参照方位に遅れなく追従させることができる参照方位とフィードフォワード制御との技術を基礎にして、さらに船体に作用する旋回時の潮流成分を考慮することによって、旋回時に計画旋回の軌跡に乗せることができる船舶用自動操舵装置を特許文献3で提案している。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】羽根冬希,「航路軌跡生成のための参照針路の設計方法」,第6回計測自動制御学会制御部門大会,2006
【特許文献】
【0007】
【特許文献1】特開平8−207894号公報
【特許文献2】特開2007−290695号公報
【特許文献3】特開2009−248897号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
特許文献3においては、旋回時に軌道計画部12から出力されるフィードフォワード舵角δFFは、参照舵角δRと潮流舵角δDとの加算となり、δRは船首方位ψを変針量Δψ0相当分変針させ、δDは潮流による航路誤差を修正するものとなっている。
【0009】
フィードフォワード舵角δFFの最大値は、潮流修正をしない参照舵角δRであれば、舵角設定値δ0に一致するが、潮流修正をする場合は、舵角設定値δ0に一致しない。潮流成分(潮流ベクトル)が対地速度を上げる場合、旋回角速度が上がるためδR及びδDの最大値が増加するからである。その結果フィードフォワード舵角δFFの最大値が舵角設定値δ0より大きくなり、操舵機の入力振幅の許容値を超えた飽和状態となり、操舵不良を起こす、という問題がある。
【0010】
本発明はかかる課題に鑑みなされたもので、操舵機の飽和状態を回避しつつ、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置を提供することをその目的とする。
【課題を解決するための手段】
【0011】
かかる目的を達成するために、本発明の請求項1に記載の発明は、センサで検出された船速が入力され、計画航路に基づき参照信号を発生すると共に旋回時に計画航路の軌跡に乗せるためのフィードフォワード舵角を出力する軌道計画部と、該軌道計画部からの参照信号とセンサで検出された検出信号とから軌道誤差を演算する軌道航路誤差演算部と、該軌道誤差から推定潮流成分とフィードバック舵角を出力するフィードバック制御部とを備え、
前記フィードバック舵角と前記フィードフォワード舵角とによって操舵機に操舵を行わせる船舶用自動操舵装置において、
前記軌道計画部は、
計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部と、
前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行う座標変換部と、
前記座標変換部で座標変換された潮流成分から潮流に対抗する斜航角βdを求める潮流修正部と、
前記参照方位ψRにするための参照舵角δRと前記斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部と、
前記推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部と、
を備え、前記参照方位発生部は、前記参照舵角δRが前記舵角設定部で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生することを特徴とする。
【0012】
請求項2記載の発明は、請求項1記載のものにおいて、前記舵角設定部は、既定の舵角設定値δ0に対して前記推定潮流成分を用いて修正することにより前記参照舵角設定値δ0Rを求めることを特徴とする。
【0013】
請求項3記載の発明は、請求項2記載のものにおいて、前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、船速Uとから、
【0014】
【数1】

として求めることを特徴とする。
【0015】
請求項4記載の発明は、請求項2記載のものにおいて、前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、参照舵角δRを発生させるときの参照方位ψRと、潮流方位ψdと、船速Uとから、
【0016】
【数2】
として求めることを特徴とする。
【0017】
請求項5記載の発明は、請求項1ないし4のいずれか1項に記載のものにおいて、
前記潮流修正部は、前記潮流に対抗する斜航角βdを、
【0018】
【数3】
から求めることを特徴とする。
【0019】
請求項6記載の発明は、請求項1ないし5のいずれか1項に記載のものにおいて、
前記座標変換部が、前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行って参照方位方向の潮流成分を求めており、前記参照方位発生部は、該参照方位方向の潮流成分による対地速度の変化に応じて修正した指定旋回角速度を用いて計画航路に従う旋回を行うための参照方位を求めることを特徴とする。
【発明の効果】
【0020】
本発明によれば、参照舵角設定値δ0Rを推定潮流成分を用いて設定し、参照舵角δRがその参照舵角設定値δ0Rを超えないように参照方位ψRを発生するようにすることで、フィードフォワード舵角δFFの最大値を規制することができ、操舵機飽和による制御不能を回避して、安全な旋回操船を実現することができる。
【0021】
また、参照舵角設定値δ0Rは簡単な計算で求めることができるため、実装処理を簡単にすることができる。
【図面の簡単な説明】
【0022】
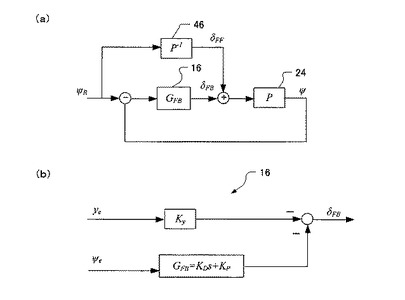
【図1】(a)は本発明による船舶用自動操舵装置の全体構成を表すブロック図、(b)はフィードバック制御部の構成を表すブロック図である。
【図2】図1の軌道計画部の構成を表すブロック図である。
【図3】航路制御系で用いる座標系を表す説明図である。
【図4】(a)は旋回制御系におけるフィードフォワード制御の概要を示すブロック図であり、(b)は(a)中のフィードバック制御部の構成を示すブロック図である。
【図5】参照方位と参照舵角の時間変化(但し安定船の場合)を示すグラフである。
【図6】旋回時の状態を表す図である。
【図7】シミュレーション結果を表すグラフである。
【図8】シミュレーション結果を表すグラフである。
【図9】シミュレーション結果を表すグラフである。
【図10】シミュレーション結果を表すグラフである。
【発明を実施するための形態】
【0023】
以下、図面を用いて本発明の実施の形態を説明する。
【0024】
図1は、船舶用自動操舵装置と制御対象の全体のブロック図である。船舶用自動操舵装置10は、計画航路に船体位置を追跡させるために舵を制御する装置であり、軌道計画部12、軌道航路誤差演算部14、フィードバック制御部16、加算器17及び各パラメータを同定する図示しない同定器を備えている。誘導システム22から計画航路及びセンサ類26のスピードログからの船速U(正確には船体のsurge速度u(後述のようにu≒U))が軌道計画部12に入力され、軌道計画部12からは参照方位ψR、参照位置xR、yRといった参照信号及び旋回時にはフィードフォワード舵角δFFが出力される。
【0025】
軌道航路誤差演算部14には、ジャイロコンパスからの船首方位ψ、GPS等の衛星測位システム(GNSS)からの位置(x,y)といったセンサ類26からの検出信号が入力され、軌道航路誤差演算部14は、前記参照方位ψR、参照位置xR、yRと検出信号との比較を行い方位誤差ψe、位置誤差xe、ye(方位誤差、位置誤差を合わせて軌道誤差とも称する)等を出力する。
【0026】
フィードバック制御部16は、図1に示すように、推定器18とフィードバックゲイン器20とからなる。軌道航路誤差演算部14からの方位誤差及び位置誤差は、推定器18に入力される。推定器18において、方位誤差ψe及び位置誤差xe、yeから、方位誤差系の状態量ψ^e、位置誤差y^e、潮流ベクトルd^x,d^yを推定する。フィードバックゲイン器20は、各誤差に対して、フィードバックゲインGFBを掛けて、フィードバック舵角δFBを出力する。
【0027】
加算器17でフィードフォワード舵角δFFとフィードバック舵角δFBとが加算されて、指令舵角δCが操舵機へと出力され、操舵機は指令舵角に比例した舵角を動かして、操舵機を含む船体24を運動させる。
【0028】
誘導システム22から与えられる計画航路は、直線航路の場合は開始位置と終端位置とから決定され、曲線航路の場合は旋回の開始位置(直線航路の終端位置に相当する)と終端点(旋回半径と旋回角で決まり、直線航路の開始位置に相当する)とで規定される。船舶用自動操舵装置の機能は直線航路と曲線航路とにおいて、船体を許容誤差内に航跡させることであり、直線航路に関してはフィードバック制御部16が受け持ち、曲線航路に関しては軌道計画部12が受け持つ。
【0029】
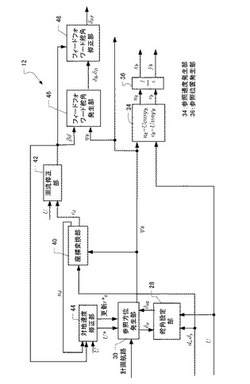
軌道計画部12は、図2に示すように、誘導システム22から曲線航路の計画航路が入力されると、その旋回条件を求め旋回条件に合致する参照方位ψRを発生する参照方位発生部30と、船体の参照速度を発生する参照速度発生部34と、船体の参照速度を積分して参照位置を発生する参照位置発生部36と、推定潮流を座標変換して参照座標系の潮流成分を発生する座標変換部40と、潮流に対抗するための斜航角βdを発生する潮流修正部42と、対地速度の修正を行う対地速度修正部44と、船体方位を参照方位ψR+斜航角βdに遅れなく追従させるためのフィードフォワード舵角δFFを出力するフィードフォワード舵角発生部46と、フィードフォワード舵角の修正を行うフィードフォワード舵角修正部48と、を備える。また、旋回条件の中で、舵角設定値δ0についての修正を行って操舵機の飽和状態を回避する舵角設定部28を備える。
【0030】
対地系で推定される潮流成分を参照方位ψRに基づき座標変換部40で変換して、座標変換された潮流成分から潮流に対抗するための修正斜航角βdを潮流修正部42で求め、修正斜航角βdを含めてフィードフォワード舵角発生部46でフィードフォワード舵角に変換してフィードフォワード制御を実行することにより、潮流の参照方位直交方向速度成分と修正斜航角βdとが相殺されて、船体航路は参照方位ψRに従い、潮流による航路誤差を防止することができる。
【0031】
また、潮流の船体の参照方位方向速度成分は方位に連動して変化するために、旋回中に対地速度は変化する。半径一定旋回を実現するために、対地速度が変化したら対地速度修正部44において、参照方位を求めるための指定旋回角速度r0*を修正する。これによって船体航路は半径一定旋回の航路に従う。
【0032】
以下、上記構成の詳細について説明する。
【0033】
1.運動方程式
1.1 座標系
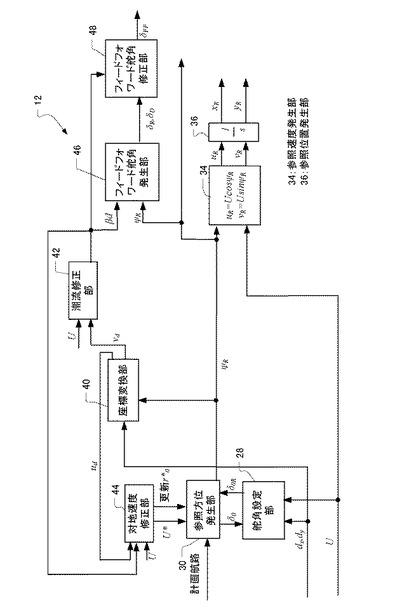
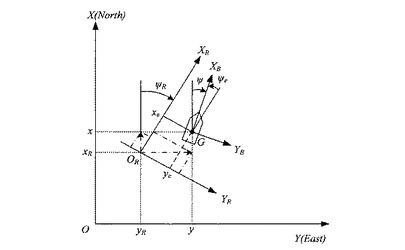
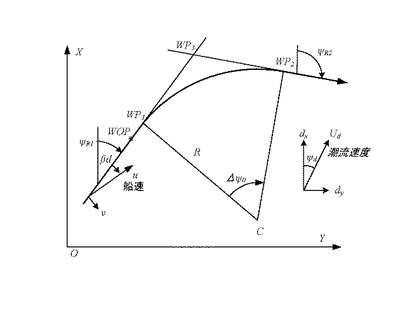
航路制御系で用いる座標系は、図3に示すように、以下の座標系から構成する。
・対地座標系(XOY):地球固定の緯度経度座標系で、GNSSからの位置出力(x、y)に相当する。
・船体座標系(XBGYB):船体固定の運動座標系で、船体の重心を原点とし、船首方位をXB 軸とし、船体運動を定める。
・参照座標系(XRORYR):誘導システム22により生成され指定された計画航路から定まる移動座標系である。
尚、座標系の回転極性は右ネジ方向を正とし、Z軸方向は重力方向を正とする。座標系はX軸、Y軸の2次元を用いる。
【0034】
1.2 船体モデル
制御対象である船体24の船体モデルPは、
【0035】
【数4】
【0036】
と表すことができる。ここで、sはラプラス演算子を意味し,Ks、Ts、Ts3は船体パラメータで、Ksは旋回力ゲイン、Ts、Ts3は時定数である。
【0037】
図4に、基本的な旋回制御系におけるフィードフォワード制御の概要を示す。同図においてGFB はフィードバック制御部16のゲインを、Pは船体モデルを、P-1 は逆の船体モデルを示す。フィードフォワード制御による参照方位ψR から船首方位ψ までの伝達特性は、
【0038】
【数5】
になる。
【0039】
ここでP-1 のパラメータ不確かさは無視できるほど小さいとすれば、(2)式により
、船首方位ψ は参照方位ψRに遅れなく追従することができる。
【0040】
よって、参照方位ψRに対してP-1 の伝達特性を持つように、舵角を決めれば、参照方位ψRに追従させることができる。P-1 は、(1)式より
【0041】
【数6】
で表される。または、Ts3≪Tsであるので、Ts3を無視した場合には、
【0042】
【数7】
で表される。
【0043】
2.旋回軌道
2.1 舵速度設定値と舵角設定値
船体の方位ψは、(2)式により参照方位ψRに追従させることができる。
軌道計画部12に入力される信号は、計画航路と船速Uであり、軌道計画部12から出力される信号は、参照方位ψR、参照位置xR、yR、フィードフォワード舵角δFFとなる。
【0044】
参照方位発生部30は、誘導システム22から曲線航路の計画航路が入力されると、旋回条件である旋回半径R、変針量(旋回角)Δψ0、指定旋回角速度r0を決定する。また、これ以外の旋回条件として、船体パラメータTs、Ks,TS3等(これらの船体パラメータは既定値であるか、または同定器によって旋回する毎に同定される)、船体運動の初期角加速度C1a、初期角速度C2a、舵角設定値δ0、舵角最大値δmax、舵速度最大値δ・max、舵速度設定値δ・0などがある。
【0045】
舵速度設定値δ・0 は、適宜設定され、例えば、δ・0 = 2.0[deg/sec]程度とすることができる。その最大値δ・maxは操舵機仕様より定まり、例えば、7/3[deg/sec]程度とすることができ、舵速度比率はδ・0/δ・max=2÷(7/3)≒0.857になる。ただしδ・0が安定船、不安定船で別途設定された場合はそれに従う。
【0046】
舵角設定値δ0は、適宜設定される。その舵角最大値δmaxは操舵機仕様より定まり、例えば、35[deg]程度とすることができる。安定船では、舵速度比率を用いると舵角設定値δ0は、
【0047】
【数8】
程度に設定することができ、不安定船では、δmaxまで10度の余裕をもたせるので、25 [deg]程度に設定することができる。
【0048】
舵角設定値δ0は、舵角設定部28へと出力され、そこで、フィードフォワード舵角δFFがこの舵角設定値δ0を超えないようにするために、置換が行われ、参照舵角設定値δ0Rが求められる。そして、参照舵角設定値δ0Rが参照方位発生部30へと返される。この参照舵角設定値δ0Rの具体的な算出については、後述する。
【0049】
2.2 参照方位
参照方位発生部30は、旋回条件の変針量(旋回角)Δψ0、指定旋回角速度r0を決定すると、これらを満足する参照方位ψRを算出する。この算出にあたっては、特許文献1
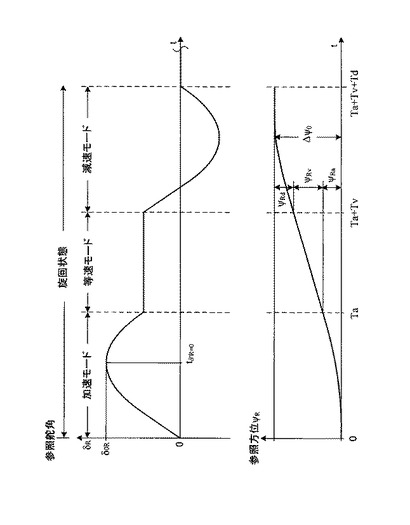
または特許文献2で提案する軌道演算部を利用することができ、軌道演算部は、船舶の所望される変針量に対して参照方位を加速モード、等速モード及び減速モードに分けて順次、時系列的に出力し、その際に、変針量に応じて最大舵速度を決定し、演算される参照方位に対応する参照舵角が前記参照舵角設定値δ0Rを超えないように、各モードの参照方位を演算して、参照方位ψRを出力する(図5)。具体的には、次のようにすることができる。
【0050】
加速モードにおける参照方位ψRの2階微分、1階微分、参照方位ψRaは、次のように表すことができる。
【0051】
【数9】
ここでt:[0≦t≦Ta]、Ta:加速時間、ηa:加速定数、C1a,C2a:初期値で変針
開始時は両者とも0である。
【0052】
等速モードにおける参照方位ψRの2階微分、1階微分、参照方位ψRvは、次のように表すことができる。
【0053】
【数10】
ここでt:[0≦t≦Tv]、Tv:等速時間である。
【0054】
減速モードにおける参照方位ψRの2階微分、1階微分、参照方位ψRdは、次のように表すことができる。
【0055】
【数11】
ここでt:[0≦t≦Td]、Td:減速時間である。C1d,C2d:初期値で各モード間の連続性、ψ・・Ra(Ta)=0、ψ・Rd(Td)=0等を考慮すると、
【0056】
【数12】
の関係が成り立つ。
【0057】
参照舵角δRは、参照方位ψRから(4)式(または(3)式でもよい)を用いて
【0058】
【数13】
になる。
【0059】
2.3 参照舵角の最大
参照舵角δRは参照方位の2階微分が2次関数であるから加速と減速とのモードで極値を持つ。参照舵角δRと舵速度δ・Rとは、加速と減速の各モードの参照方位の(5)式及び(6)式を(7)式に代入すると、
【0060】
【数14】
【0061】
【数15】
となる。ここで、a3、a2、a1、a0はそれぞれ加速モード(添字(・)a)と減速モード(添字(・)d)に対して、
【0062】
【数16】
【0063】
【数17】
になる。
【0064】
最大舵角の最大値は舵速度をゼロにする極値で生じるから(9)式よりその時間は、
【0065】
【数18】
【0066】
で与えられる。ここで、分子の±の極性は+が安定船に、−が不安定船に対応する。舵角の絶対値の最大値は、安定船の場合には、加速モードで生じる最大舵角であり、不安定船の場合には、減速モードで生じる最小舵角であり、(10)式の時間tδ'R=0を(8)式に代入することで求まる。
【0067】
2.3.1 安定船の場合
初期値C1a,C2aを0とし、Ts>Taとしてテイラー展開の2次までを用いて、極値をとる時間を、(10)式から求めると、
【0068】
【数19】
【0069】
【数20】
になるから、極値の時間は、
【0070】
【数21】
【0071】
になる。上記式の括弧内の第1項は参照方位の2階微分の極値時間に相当し、第2項は参照方位の1階微分の極値時間に相当する。よって、舵角の最大値は(11)式を(8)式に代入して、
【0072】
【数22】
になる。
【0073】
2.3.2 不安定船の場合
減速モードで最小舵角を生じるのを除き、安定船の場合と同様で、極値の時間は
【0074】
【数23】
となり、舵角の最小値は、
【0075】
【数24】
となる。
【0076】
2.4 等減速比
等速時間Tvと減速時間Tdとの比率を等減速比Rvdとする(初期角加速度C1aと初期角速度C2aがゼロであればTd=Taとなる)。即ち、
【0077】
【数25】
とする。
【0078】
等速時の指定旋回角速度r0=U/Rが決定されており、加速時間Ta、加速定数ηa及びRvdが決定されれば、各係数は決まり、各モードにおける参照方位ψRを求めることができる。
【0079】
以降、初期角加速度C1aと初期角速度C2aがゼロとすると、加速時間Taと加速定数ηaと、最大舵速度δR・との関係は、
【0080】
【数26】
となる。ここで、CRは舵定数と呼ぶ。加速モード、等速モード、減速モードの全モードの変針量Δψ0は、
【0081】
【数27】
となり、書き直すと、
【0082】
【数28】
になる。
【0083】
参照方位発生部30は、変針量から最大舵速度を決定し、演算される参照方位に基づきそれに対応する参照舵角δRの舵速度が前記決定された最大舵速度を超えないように、且つ参照舵角δRが参照舵角設定値δ0Rを超えないように、Ta、ηaを決定する。
【0084】
より具体的には、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、参照舵角δRが参照舵角設定値δ0R以下の条件(舵角条件)を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、参照舵角δRと参照舵角設定値δ0Rとの偏差を最も小さくする角速度を旋回角速度rRに決定し、それを新たな指定旋回角速度とする。そして、その決定された指定旋回角速度における最大舵速度δR・を舵速度上限値とする。
【0085】
参照舵角δRが参照舵角設定値δ0R以下の条件を満足するか(舵角条件)どうかを判定するときに、等減速比Rvdを変化させながら、条件を満足するかを判定する。そして等減速比Rvdを変化させても舵角条件を満足しない場合には、旋回角速度rRを変化させて、舵角条件を満足させる旋回角速度rRを見つける。
【0086】
2.5 参照位置
参照方位発生部30から出力された参照方位ψRを用いて、参照速度は、参照速度発生部34において、
【0087】
【数29】
から得られる。ここでuR,vR は対地系参照速度でそれぞれx,y方向を表し、tは時間を表す。そして、これを参照位置発生部36で積分することで、参照航路を、
【0088】
【数30】
として求める。
【0089】
2.6 参照舵角
参照方位発生部30は、逐次計算される参照方位ψRをフィードフォワード舵角発生部46に出力し、フィードフォワード舵角発生部46では(3)式または(4)式により、参照舵角δRを演算する。
【0090】
3.参照座標系の速度
3.1 潮流ベクトルの変換
半径一定の旋回時の様子を図6に示す。ここでXOY:対地座標系、WP1,WP2:円弧旋回の開始と終端との位置、R:旋回半径、Δψ0:旋回角(変針量)、ψR1,ψR2:それぞれ旋回前後の直線レグの方位、WOP:変針モードの開始位置(終了位置はWP2付近)、u,v:船体座標系の船体のsurge速度、sway速度、dx,dy:対地座標系の潮流速度成分であり、風力が船体上部構造物を押すことによる速度成分を含む。
【0091】
参照座標系における対地速度は、対水速度と潮流速度との和になり、
【0092】
【数31】
【0093】
になる。ここで、u*、v*は参照座標系における速度成分、uβ、vβは参照座標系における対水速度成分、ud、vdは参照座標系における潮流速度成分で、それぞれの成分は、参照方位方向(円弧の接線方向になる)、及びその右手直交方向(円弧では法線方向になる)を正とし、
【0094】
【数32】
となる。ここで、βdは潮流修正のための斜航角であり、
【0095】
【数33】
【0096】
である。ここで、Kvは船体横流れゲインを表し(Kv/Ks<0)、U(=√(u2+v2))は対水速度であり、u2≫v2の関係を用い、U=uとする。Ud(=√(dx2+dy2))は潮流速度であり、ψd(=tan-1(dy/dx))は潮流方位である。
【0097】
座標変換部40は、推定器18から求められた対地座標系の推定潮流成分dx^,dy^を潮流速度成分dx,dyとして、参照方位発生部30で発生された参照方位ψRを用いて(
17)式により、参照座標系の潮流速度成分ud、vdに変換する。
【0098】
3.2 潮流成分に関する修正
(15)式で表される参照座標系の速度成分の、潮流成分に関する修正は、次のように行う。
【0099】
3.2.1 v*に関して
(15)式、(16)式から、βdを微小角として、
【0100】
【数34】
【0101】
と近似する。vは船体座標系のsway速度で、旋回時に生じる横流れ速度に相当する。この横流れ速度に関する修正は、フィードフォワード舵角に反映させることにしてもよいが、フィードフォワード舵角のさらなる増大を招くことになるため、ここでは省略するものとする。旋回の操舵開始位置と旋回開始位置とに距離(リーチ(Reach)と呼ぶ)の計算で横流れ速度に関する修正を行うことで、対応することができるからである。
よって、修正は、
【0102】
【数35】
【0103】
によって斜航角βdを調整し、vdを相殺することで行うものとする。よって、潮流修正部42は、(21)式から斜航角βdを求める。
【0104】
3.2.2 u*に関して
潮流成分も含んだ指定旋回角速度r0*は
【0105】
【数36】
になる。ここで、SetΔu:速度更新設定値(例えば1knot)、u0*:前回の値とする。
【0106】
対地速度修正部44は、(15)式、(21)式、(16)式によって、得られた対地速度u*の変化がΔuを越えると、(22)式に従い、指定旋回角速度r0*を更新し、対地速度u*と共にそれを参照方位発生部30へと出力する。
【0107】
参照方位発生部30は、更新された指定旋回角速度r0*を満足する参照方位ψRを再計算する。その際の変針量は既に変針された方位分を差し引いた量、
【0108】
【数37】
になる。ここでψ0*:変化する指定変針量、Δψ0:計画航路の変針量、Δψ’R:既に変針された方位量である。
【0109】
3.3 フィードフォワード舵角
フィードフォワード舵角発生部46は、計画航路に船体航路を追跡させるために、参照舵角((7)式)に加えて潮流の斜航角に対応する潮流舵角δDを求める。
【0110】
潮流の斜航角βdに対応する潮流舵角δDは、(3)式または(4)式により、
【0111】
【数38】
により得られる。
【0112】
3.4 フィードフォワード修正
潮流の斜航角βdは、(21)式、(17)式に示されるように、閉ループ系のフィードバック制御部16内にある推定器18から得られる推定潮流成分d x^、dy^から求まるので、参照方位ψRに加算して、軌道航路誤差演算部14に出力すると、マイナーループが構成されて、制御系特性が変化してしまう。
【0113】
よって、βdは前方に帰還できないので、フィードフォワード舵角修正部48によって、後方で修正する。
【0114】
斜航角βdを前方に帰還した場合の軌道航路誤差演算部14で求まる偏差は、
【0115】
【数39】
になる。ここでψe =ψR−ψである。斜航角βdを含めたフィードバック舵角は、
【0116】
【数40】
になる。尚、フィードバックゲインGFBは、GFB=KP+KDsである。
【0117】
よってフィードバック舵角
【0118】
【数41】
による修正を実施すれば、前方のψR に帰還した場合と同等の応答特性、を得ることができる。
【0119】
フィードフォワード舵角修正部48は、フィードフォワード舵角発生部46で得られたフィードフォワード舵角に対して、潮流の斜航角βdに対してフィードバックゲインGFBを掛けたものを修正フィードバック舵角として、加算して修正する。
【0120】
4.フィードフォワード舵角の最大値
(17)式の潮流速度を整理すると、
【0121】
【数42】
となり、vdの導関数は、上式から、
【0122】
【数43】
となる。vdの2次微分は、コリオリ項(第2項)を含む。斜航角βd修正のための潮流舵角δDは、(24)式から
【0123】
【数44】
になる。ここで、(21)式、(28)式、(29)式による
【0124】
【数45】
の関係を用いている。
【0125】
フィードフォワード舵角δFFは、参照舵角δRと潮流舵角δDとの和になるので、
【0126】
【数46】
【0127】
になる。このδFFの採り得る大きさを検討すると、潮流方位と参照方位との偏差のsin、cosの極性によって変化し、その絶対値の最大値はδDがδRと同極性のときに生じる。
【0128】
Rψの大きさを調べる。安定船の場合で、(31)式の分母と分子に、(5)式、(11)式をそれぞれ代入すると、
【0129】
【数47】
を得る。ここで、T'a=Ta/Ts、r*0=ηa・Ta/6の関係を用いている。また、T'aの2乗項以上を省く。上式2つの比率をとると、
【0130】
【数48】
に近似することができる。以下表に2つの例(一方が通常例、他方が極端な例)を例示する。
【0131】
【表1】
【0132】
上記2例を(33)式に代入すると、
【0133】
【数49】
になり、数値例からはRψの範囲として、上記条件を満足することが示される。
【0134】
通常、Rψは0.1程度になる。(32)式の右辺のUd/uの係数において、
【0135】
【数50】
から、cosの項は、sinの項よりも支配的になると見なせるので、
【0136】
【数51】
に近似することができる。上式より、δFFは、cos(ψd−ψR)の値により増減し、その最大値は、
【0137】
【数52】
【0138】
になる。上式より潮流修正時のδFFがδ0を超える場合、操舵機の入力飽和を発生させる。よって、その不具合を防止するために、舵角設定部28で、既定の舵角設定値δ0に対して参照舵角設定値δ0Rを、次のように設定する。
【0139】
【数53】
参照舵角設定値δ0Rを参照方位発生部30へ出力することによって、フィードフォワード舵角δFFの最大値は、
【0140】
【数54】
になるため、入力飽和による不具合を回避することができる。舵角設定部28は、軌道計画が呼ばれる度に、U(=u)及びUdを求めて参照舵角設定値δ0Rを更新する。
または、(32)式において、同極性である2つの場合の、ψd−ψR=0、4/πの場合を考える。
【0141】
【数55】
【0142】
ここで、|xのxは、偏差ψd−ψRの値を示す。u*は偏差によって異なるので、δRの値も、異なることに留意されたい。また、実際のδRの最大値はψRが少し変化したときに生じるから(図5参照)、上記偏差の値と同じ訳ではない。
(38)式において、
【0143】
【数56】
の条件が満足されるものとすると、フィードフォワード舵角の最大値は、
【0144】
【数57】
になる。よって、舵角設定部28で、既定の舵角設定値δ0に対して参照舵角設定値δ0Rを、
【0145】
【数58】
に設定し、それを参照方位発生部30へ出力することによって、フィードフォワード舵角δFFの最大値は、
【0146】
【数59】
になるため、入力飽和による不具合を回避することができる。舵角設定部28は、軌道計画が呼ばれる度に、U(=u)及びUdを求めて参照舵角設定値δ0Rを更新する。
【0147】
5.数値計算例
参照舵角δRの参照舵角設定値δ0Rにより、FF舵角の最大値が|δFF|max ≦δ0を満足することを数値計算によって検証する。
【0148】
旋回条件は、(換算:1NM=1852m,1knot=0.5144m/s)
【0149】
【表2】
その他、U=20knot,Ud=5knot,R=1NMである。
【0150】
図7及び図8は、Δψ0=90deg、ψR1=40deg、ψR2=130deg、それぞれ安定船(δ0=30[deg]、ψd=ψR1)、不安定船(δ0=25[deg] 、ψd=ψR2)のときを示し、FF舵角δFFが舵角設定値δ0に収まっている。
【0151】
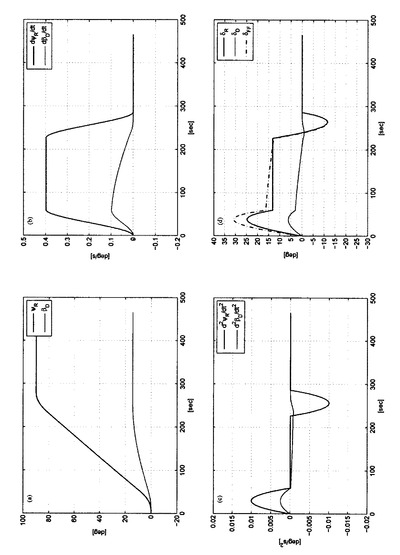
図9及び図10は、Δψ0=100[deg]、SetΔu=1knotとし、対地速度修正を行った場合で、(a)はψd=ψR1、(c)はψd=ψR2の場合である。安定船は(a)の場合、不安定船は(c)の場合でFF舵角δFFが最大となるが、FF舵角δFFは舵角設定値δ0に収まっている。
【符号の説明】
【0152】
10 船舶用自動操舵装置
12 軌道計画部
14 軌道航路誤差演算部
16 フィードバック制御部
18 推定器
20 フィードバックゲイン器
28 舵角設定部
30 参照方位発生部
34 参照速度発生部
36 参照位置発生部
40 座標変換部
42 潮流修正部
46 フィードフォワード舵角発生部
【技術分野】
【0001】
本発明は、航路制御系の船舶用自動操舵装置に関し、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置に関する。
【背景技術】
【0002】
船舶用自動操舵装置は、舵角を制御して設定方位に船首方位を追従させる方位制御系(HCS: Heading Control System)と、計画航路に船体位置を追跡させる航路制御系(TCS:Track Control System)とに分けられる。マイクロチップの高機能化、衛星測位システム(GNSS:Global Navigation Satellite System)の小型化・低コスト化・高精度化により位置情報が簡単に得られるようになったことに伴い、航路制御系の要求が高まっている。
【0003】
一般的な航路制御系の船舶用自動操舵装置は、図1に示すように軌道計画部12、軌道航路誤差演算部14、フィードバック制御部16及び加算器17を備える。誘導システム22からの計画航路に基づき軌道計画部12が出力する参照方位ψRと参照位置xR、yRと、センサから検出される方位ψと位置x、yとの誤差を軌道航路誤差演算部14が求める。フィードバック制御部16は、主として保針時にその誤差から船体の方位と位置とを追跡させるべくフィードバック舵角δFBを出力する。航路制御系のフィードバック制御系の制御時定数は方位制御系の制御時定数より長く、且つ、旋回時間は方位制御系の時定数より通常短いので、旋回で生じた航路誤差は、旋回中にフィードバック制御系で収斂させることは難しい。よって、旋回時には軌道計画部12からフィードフォワード舵角δFFが出力される。加算器17は、フィードバック舵角δFBとフィードフォワード舵角δFFとを加算して指令舵角δCを船体24の操舵機に出力する。計画航路は、直線と円弧の曲線とから定められる。
【0004】
旋回時には、船体に印加する潮流成分は船首方位によって変化するために、潮流成分を考慮しないと、航路誤差が過渡的に生じることになる。
【0005】
そこで、本願発明者は、特許文献1、非特許文献1及び特許文献2で提案する、方位制御系において、船首方位を参照方位に遅れなく追従させることができる参照方位とフィードフォワード制御との技術を基礎にして、さらに船体に作用する旋回時の潮流成分を考慮することによって、旋回時に計画旋回の軌跡に乗せることができる船舶用自動操舵装置を特許文献3で提案している。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】羽根冬希,「航路軌跡生成のための参照針路の設計方法」,第6回計測自動制御学会制御部門大会,2006
【特許文献】
【0007】
【特許文献1】特開平8−207894号公報
【特許文献2】特開2007−290695号公報
【特許文献3】特開2009−248897号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
特許文献3においては、旋回時に軌道計画部12から出力されるフィードフォワード舵角δFFは、参照舵角δRと潮流舵角δDとの加算となり、δRは船首方位ψを変針量Δψ0相当分変針させ、δDは潮流による航路誤差を修正するものとなっている。
【0009】
フィードフォワード舵角δFFの最大値は、潮流修正をしない参照舵角δRであれば、舵角設定値δ0に一致するが、潮流修正をする場合は、舵角設定値δ0に一致しない。潮流成分(潮流ベクトル)が対地速度を上げる場合、旋回角速度が上がるためδR及びδDの最大値が増加するからである。その結果フィードフォワード舵角δFFの最大値が舵角設定値δ0より大きくなり、操舵機の入力振幅の許容値を超えた飽和状態となり、操舵不良を起こす、という問題がある。
【0010】
本発明はかかる課題に鑑みなされたもので、操舵機の飽和状態を回避しつつ、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置を提供することをその目的とする。
【課題を解決するための手段】
【0011】
かかる目的を達成するために、本発明の請求項1に記載の発明は、センサで検出された船速が入力され、計画航路に基づき参照信号を発生すると共に旋回時に計画航路の軌跡に乗せるためのフィードフォワード舵角を出力する軌道計画部と、該軌道計画部からの参照信号とセンサで検出された検出信号とから軌道誤差を演算する軌道航路誤差演算部と、該軌道誤差から推定潮流成分とフィードバック舵角を出力するフィードバック制御部とを備え、
前記フィードバック舵角と前記フィードフォワード舵角とによって操舵機に操舵を行わせる船舶用自動操舵装置において、
前記軌道計画部は、
計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部と、
前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行う座標変換部と、
前記座標変換部で座標変換された潮流成分から潮流に対抗する斜航角βdを求める潮流修正部と、
前記参照方位ψRにするための参照舵角δRと前記斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部と、
前記推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部と、
を備え、前記参照方位発生部は、前記参照舵角δRが前記舵角設定部で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生することを特徴とする。
【0012】
請求項2記載の発明は、請求項1記載のものにおいて、前記舵角設定部は、既定の舵角設定値δ0に対して前記推定潮流成分を用いて修正することにより前記参照舵角設定値δ0Rを求めることを特徴とする。
【0013】
請求項3記載の発明は、請求項2記載のものにおいて、前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、船速Uとから、
【0014】
【数1】
として求めることを特徴とする。
【0015】
請求項4記載の発明は、請求項2記載のものにおいて、前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、参照舵角δRを発生させるときの参照方位ψRと、潮流方位ψdと、船速Uとから、
【0016】
【数2】
として求めることを特徴とする。
【0017】
請求項5記載の発明は、請求項1ないし4のいずれか1項に記載のものにおいて、
前記潮流修正部は、前記潮流に対抗する斜航角βdを、
【0018】
【数3】
から求めることを特徴とする。
【0019】
請求項6記載の発明は、請求項1ないし5のいずれか1項に記載のものにおいて、
前記座標変換部が、前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行って参照方位方向の潮流成分を求めており、前記参照方位発生部は、該参照方位方向の潮流成分による対地速度の変化に応じて修正した指定旋回角速度を用いて計画航路に従う旋回を行うための参照方位を求めることを特徴とする。
【発明の効果】
【0020】
本発明によれば、参照舵角設定値δ0Rを推定潮流成分を用いて設定し、参照舵角δRがその参照舵角設定値δ0Rを超えないように参照方位ψRを発生するようにすることで、フィードフォワード舵角δFFの最大値を規制することができ、操舵機飽和による制御不能を回避して、安全な旋回操船を実現することができる。
【0021】
また、参照舵角設定値δ0Rは簡単な計算で求めることができるため、実装処理を簡単にすることができる。
【図面の簡単な説明】
【0022】
【図1】(a)は本発明による船舶用自動操舵装置の全体構成を表すブロック図、(b)はフィードバック制御部の構成を表すブロック図である。
【図2】図1の軌道計画部の構成を表すブロック図である。
【図3】航路制御系で用いる座標系を表す説明図である。
【図4】(a)は旋回制御系におけるフィードフォワード制御の概要を示すブロック図であり、(b)は(a)中のフィードバック制御部の構成を示すブロック図である。
【図5】参照方位と参照舵角の時間変化(但し安定船の場合)を示すグラフである。
【図6】旋回時の状態を表す図である。
【図7】シミュレーション結果を表すグラフである。
【図8】シミュレーション結果を表すグラフである。
【図9】シミュレーション結果を表すグラフである。
【図10】シミュレーション結果を表すグラフである。
【発明を実施するための形態】
【0023】
以下、図面を用いて本発明の実施の形態を説明する。
【0024】
図1は、船舶用自動操舵装置と制御対象の全体のブロック図である。船舶用自動操舵装置10は、計画航路に船体位置を追跡させるために舵を制御する装置であり、軌道計画部12、軌道航路誤差演算部14、フィードバック制御部16、加算器17及び各パラメータを同定する図示しない同定器を備えている。誘導システム22から計画航路及びセンサ類26のスピードログからの船速U(正確には船体のsurge速度u(後述のようにu≒U))が軌道計画部12に入力され、軌道計画部12からは参照方位ψR、参照位置xR、yRといった参照信号及び旋回時にはフィードフォワード舵角δFFが出力される。
【0025】
軌道航路誤差演算部14には、ジャイロコンパスからの船首方位ψ、GPS等の衛星測位システム(GNSS)からの位置(x,y)といったセンサ類26からの検出信号が入力され、軌道航路誤差演算部14は、前記参照方位ψR、参照位置xR、yRと検出信号との比較を行い方位誤差ψe、位置誤差xe、ye(方位誤差、位置誤差を合わせて軌道誤差とも称する)等を出力する。
【0026】
フィードバック制御部16は、図1に示すように、推定器18とフィードバックゲイン器20とからなる。軌道航路誤差演算部14からの方位誤差及び位置誤差は、推定器18に入力される。推定器18において、方位誤差ψe及び位置誤差xe、yeから、方位誤差系の状態量ψ^e、位置誤差y^e、潮流ベクトルd^x,d^yを推定する。フィードバックゲイン器20は、各誤差に対して、フィードバックゲインGFBを掛けて、フィードバック舵角δFBを出力する。
【0027】
加算器17でフィードフォワード舵角δFFとフィードバック舵角δFBとが加算されて、指令舵角δCが操舵機へと出力され、操舵機は指令舵角に比例した舵角を動かして、操舵機を含む船体24を運動させる。
【0028】
誘導システム22から与えられる計画航路は、直線航路の場合は開始位置と終端位置とから決定され、曲線航路の場合は旋回の開始位置(直線航路の終端位置に相当する)と終端点(旋回半径と旋回角で決まり、直線航路の開始位置に相当する)とで規定される。船舶用自動操舵装置の機能は直線航路と曲線航路とにおいて、船体を許容誤差内に航跡させることであり、直線航路に関してはフィードバック制御部16が受け持ち、曲線航路に関しては軌道計画部12が受け持つ。
【0029】
軌道計画部12は、図2に示すように、誘導システム22から曲線航路の計画航路が入力されると、その旋回条件を求め旋回条件に合致する参照方位ψRを発生する参照方位発生部30と、船体の参照速度を発生する参照速度発生部34と、船体の参照速度を積分して参照位置を発生する参照位置発生部36と、推定潮流を座標変換して参照座標系の潮流成分を発生する座標変換部40と、潮流に対抗するための斜航角βdを発生する潮流修正部42と、対地速度の修正を行う対地速度修正部44と、船体方位を参照方位ψR+斜航角βdに遅れなく追従させるためのフィードフォワード舵角δFFを出力するフィードフォワード舵角発生部46と、フィードフォワード舵角の修正を行うフィードフォワード舵角修正部48と、を備える。また、旋回条件の中で、舵角設定値δ0についての修正を行って操舵機の飽和状態を回避する舵角設定部28を備える。
【0030】
対地系で推定される潮流成分を参照方位ψRに基づき座標変換部40で変換して、座標変換された潮流成分から潮流に対抗するための修正斜航角βdを潮流修正部42で求め、修正斜航角βdを含めてフィードフォワード舵角発生部46でフィードフォワード舵角に変換してフィードフォワード制御を実行することにより、潮流の参照方位直交方向速度成分と修正斜航角βdとが相殺されて、船体航路は参照方位ψRに従い、潮流による航路誤差を防止することができる。
【0031】
また、潮流の船体の参照方位方向速度成分は方位に連動して変化するために、旋回中に対地速度は変化する。半径一定旋回を実現するために、対地速度が変化したら対地速度修正部44において、参照方位を求めるための指定旋回角速度r0*を修正する。これによって船体航路は半径一定旋回の航路に従う。
【0032】
以下、上記構成の詳細について説明する。
【0033】
1.運動方程式
1.1 座標系
航路制御系で用いる座標系は、図3に示すように、以下の座標系から構成する。
・対地座標系(XOY):地球固定の緯度経度座標系で、GNSSからの位置出力(x、y)に相当する。
・船体座標系(XBGYB):船体固定の運動座標系で、船体の重心を原点とし、船首方位をXB 軸とし、船体運動を定める。
・参照座標系(XRORYR):誘導システム22により生成され指定された計画航路から定まる移動座標系である。
尚、座標系の回転極性は右ネジ方向を正とし、Z軸方向は重力方向を正とする。座標系はX軸、Y軸の2次元を用いる。
【0034】
1.2 船体モデル
制御対象である船体24の船体モデルPは、
【0035】
【数4】
【0036】
と表すことができる。ここで、sはラプラス演算子を意味し,Ks、Ts、Ts3は船体パラメータで、Ksは旋回力ゲイン、Ts、Ts3は時定数である。
【0037】
図4に、基本的な旋回制御系におけるフィードフォワード制御の概要を示す。同図においてGFB はフィードバック制御部16のゲインを、Pは船体モデルを、P-1 は逆の船体モデルを示す。フィードフォワード制御による参照方位ψR から船首方位ψ までの伝達特性は、
【0038】
【数5】
になる。
【0039】
ここでP-1 のパラメータ不確かさは無視できるほど小さいとすれば、(2)式により
、船首方位ψ は参照方位ψRに遅れなく追従することができる。
【0040】
よって、参照方位ψRに対してP-1 の伝達特性を持つように、舵角を決めれば、参照方位ψRに追従させることができる。P-1 は、(1)式より
【0041】
【数6】
で表される。または、Ts3≪Tsであるので、Ts3を無視した場合には、
【0042】
【数7】
で表される。
【0043】
2.旋回軌道
2.1 舵速度設定値と舵角設定値
船体の方位ψは、(2)式により参照方位ψRに追従させることができる。
軌道計画部12に入力される信号は、計画航路と船速Uであり、軌道計画部12から出力される信号は、参照方位ψR、参照位置xR、yR、フィードフォワード舵角δFFとなる。
【0044】
参照方位発生部30は、誘導システム22から曲線航路の計画航路が入力されると、旋回条件である旋回半径R、変針量(旋回角)Δψ0、指定旋回角速度r0を決定する。また、これ以外の旋回条件として、船体パラメータTs、Ks,TS3等(これらの船体パラメータは既定値であるか、または同定器によって旋回する毎に同定される)、船体運動の初期角加速度C1a、初期角速度C2a、舵角設定値δ0、舵角最大値δmax、舵速度最大値δ・max、舵速度設定値δ・0などがある。
【0045】
舵速度設定値δ・0 は、適宜設定され、例えば、δ・0 = 2.0[deg/sec]程度とすることができる。その最大値δ・maxは操舵機仕様より定まり、例えば、7/3[deg/sec]程度とすることができ、舵速度比率はδ・0/δ・max=2÷(7/3)≒0.857になる。ただしδ・0が安定船、不安定船で別途設定された場合はそれに従う。
【0046】
舵角設定値δ0は、適宜設定される。その舵角最大値δmaxは操舵機仕様より定まり、例えば、35[deg]程度とすることができる。安定船では、舵速度比率を用いると舵角設定値δ0は、
【0047】
【数8】
程度に設定することができ、不安定船では、δmaxまで10度の余裕をもたせるので、25 [deg]程度に設定することができる。
【0048】
舵角設定値δ0は、舵角設定部28へと出力され、そこで、フィードフォワード舵角δFFがこの舵角設定値δ0を超えないようにするために、置換が行われ、参照舵角設定値δ0Rが求められる。そして、参照舵角設定値δ0Rが参照方位発生部30へと返される。この参照舵角設定値δ0Rの具体的な算出については、後述する。
【0049】
2.2 参照方位
参照方位発生部30は、旋回条件の変針量(旋回角)Δψ0、指定旋回角速度r0を決定すると、これらを満足する参照方位ψRを算出する。この算出にあたっては、特許文献1
または特許文献2で提案する軌道演算部を利用することができ、軌道演算部は、船舶の所望される変針量に対して参照方位を加速モード、等速モード及び減速モードに分けて順次、時系列的に出力し、その際に、変針量に応じて最大舵速度を決定し、演算される参照方位に対応する参照舵角が前記参照舵角設定値δ0Rを超えないように、各モードの参照方位を演算して、参照方位ψRを出力する(図5)。具体的には、次のようにすることができる。
【0050】
加速モードにおける参照方位ψRの2階微分、1階微分、参照方位ψRaは、次のように表すことができる。
【0051】
【数9】
ここでt:[0≦t≦Ta]、Ta:加速時間、ηa:加速定数、C1a,C2a:初期値で変針
開始時は両者とも0である。
【0052】
等速モードにおける参照方位ψRの2階微分、1階微分、参照方位ψRvは、次のように表すことができる。
【0053】
【数10】
ここでt:[0≦t≦Tv]、Tv:等速時間である。
【0054】
減速モードにおける参照方位ψRの2階微分、1階微分、参照方位ψRdは、次のように表すことができる。
【0055】
【数11】
ここでt:[0≦t≦Td]、Td:減速時間である。C1d,C2d:初期値で各モード間の連続性、ψ・・Ra(Ta)=0、ψ・Rd(Td)=0等を考慮すると、
【0056】
【数12】
の関係が成り立つ。
【0057】
参照舵角δRは、参照方位ψRから(4)式(または(3)式でもよい)を用いて
【0058】
【数13】
になる。
【0059】
2.3 参照舵角の最大
参照舵角δRは参照方位の2階微分が2次関数であるから加速と減速とのモードで極値を持つ。参照舵角δRと舵速度δ・Rとは、加速と減速の各モードの参照方位の(5)式及び(6)式を(7)式に代入すると、
【0060】
【数14】
【0061】
【数15】
となる。ここで、a3、a2、a1、a0はそれぞれ加速モード(添字(・)a)と減速モード(添字(・)d)に対して、
【0062】
【数16】
【0063】
【数17】
になる。
【0064】
最大舵角の最大値は舵速度をゼロにする極値で生じるから(9)式よりその時間は、
【0065】
【数18】
【0066】
で与えられる。ここで、分子の±の極性は+が安定船に、−が不安定船に対応する。舵角の絶対値の最大値は、安定船の場合には、加速モードで生じる最大舵角であり、不安定船の場合には、減速モードで生じる最小舵角であり、(10)式の時間tδ'R=0を(8)式に代入することで求まる。
【0067】
2.3.1 安定船の場合
初期値C1a,C2aを0とし、Ts>Taとしてテイラー展開の2次までを用いて、極値をとる時間を、(10)式から求めると、
【0068】
【数19】
【0069】
【数20】
になるから、極値の時間は、
【0070】
【数21】
【0071】
になる。上記式の括弧内の第1項は参照方位の2階微分の極値時間に相当し、第2項は参照方位の1階微分の極値時間に相当する。よって、舵角の最大値は(11)式を(8)式に代入して、
【0072】
【数22】
になる。
【0073】
2.3.2 不安定船の場合
減速モードで最小舵角を生じるのを除き、安定船の場合と同様で、極値の時間は
【0074】
【数23】
となり、舵角の最小値は、
【0075】
【数24】
となる。
【0076】
2.4 等減速比
等速時間Tvと減速時間Tdとの比率を等減速比Rvdとする(初期角加速度C1aと初期角速度C2aがゼロであればTd=Taとなる)。即ち、
【0077】
【数25】
とする。
【0078】
等速時の指定旋回角速度r0=U/Rが決定されており、加速時間Ta、加速定数ηa及びRvdが決定されれば、各係数は決まり、各モードにおける参照方位ψRを求めることができる。
【0079】
以降、初期角加速度C1aと初期角速度C2aがゼロとすると、加速時間Taと加速定数ηaと、最大舵速度δR・との関係は、
【0080】
【数26】
となる。ここで、CRは舵定数と呼ぶ。加速モード、等速モード、減速モードの全モードの変針量Δψ0は、
【0081】
【数27】
となり、書き直すと、
【0082】
【数28】
になる。
【0083】
参照方位発生部30は、変針量から最大舵速度を決定し、演算される参照方位に基づきそれに対応する参照舵角δRの舵速度が前記決定された最大舵速度を超えないように、且つ参照舵角δRが参照舵角設定値δ0Rを超えないように、Ta、ηaを決定する。
【0084】
より具体的には、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、参照舵角δRが参照舵角設定値δ0R以下の条件(舵角条件)を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、参照舵角δRと参照舵角設定値δ0Rとの偏差を最も小さくする角速度を旋回角速度rRに決定し、それを新たな指定旋回角速度とする。そして、その決定された指定旋回角速度における最大舵速度δR・を舵速度上限値とする。
【0085】
参照舵角δRが参照舵角設定値δ0R以下の条件を満足するか(舵角条件)どうかを判定するときに、等減速比Rvdを変化させながら、条件を満足するかを判定する。そして等減速比Rvdを変化させても舵角条件を満足しない場合には、旋回角速度rRを変化させて、舵角条件を満足させる旋回角速度rRを見つける。
【0086】
2.5 参照位置
参照方位発生部30から出力された参照方位ψRを用いて、参照速度は、参照速度発生部34において、
【0087】
【数29】
から得られる。ここでuR,vR は対地系参照速度でそれぞれx,y方向を表し、tは時間を表す。そして、これを参照位置発生部36で積分することで、参照航路を、
【0088】
【数30】
として求める。
【0089】
2.6 参照舵角
参照方位発生部30は、逐次計算される参照方位ψRをフィードフォワード舵角発生部46に出力し、フィードフォワード舵角発生部46では(3)式または(4)式により、参照舵角δRを演算する。
【0090】
3.参照座標系の速度
3.1 潮流ベクトルの変換
半径一定の旋回時の様子を図6に示す。ここでXOY:対地座標系、WP1,WP2:円弧旋回の開始と終端との位置、R:旋回半径、Δψ0:旋回角(変針量)、ψR1,ψR2:それぞれ旋回前後の直線レグの方位、WOP:変針モードの開始位置(終了位置はWP2付近)、u,v:船体座標系の船体のsurge速度、sway速度、dx,dy:対地座標系の潮流速度成分であり、風力が船体上部構造物を押すことによる速度成分を含む。
【0091】
参照座標系における対地速度は、対水速度と潮流速度との和になり、
【0092】
【数31】
【0093】
になる。ここで、u*、v*は参照座標系における速度成分、uβ、vβは参照座標系における対水速度成分、ud、vdは参照座標系における潮流速度成分で、それぞれの成分は、参照方位方向(円弧の接線方向になる)、及びその右手直交方向(円弧では法線方向になる)を正とし、
【0094】
【数32】
となる。ここで、βdは潮流修正のための斜航角であり、
【0095】
【数33】
【0096】
である。ここで、Kvは船体横流れゲインを表し(Kv/Ks<0)、U(=√(u2+v2))は対水速度であり、u2≫v2の関係を用い、U=uとする。Ud(=√(dx2+dy2))は潮流速度であり、ψd(=tan-1(dy/dx))は潮流方位である。
【0097】
座標変換部40は、推定器18から求められた対地座標系の推定潮流成分dx^,dy^を潮流速度成分dx,dyとして、参照方位発生部30で発生された参照方位ψRを用いて(
17)式により、参照座標系の潮流速度成分ud、vdに変換する。
【0098】
3.2 潮流成分に関する修正
(15)式で表される参照座標系の速度成分の、潮流成分に関する修正は、次のように行う。
【0099】
3.2.1 v*に関して
(15)式、(16)式から、βdを微小角として、
【0100】
【数34】
【0101】
と近似する。vは船体座標系のsway速度で、旋回時に生じる横流れ速度に相当する。この横流れ速度に関する修正は、フィードフォワード舵角に反映させることにしてもよいが、フィードフォワード舵角のさらなる増大を招くことになるため、ここでは省略するものとする。旋回の操舵開始位置と旋回開始位置とに距離(リーチ(Reach)と呼ぶ)の計算で横流れ速度に関する修正を行うことで、対応することができるからである。
よって、修正は、
【0102】
【数35】
【0103】
によって斜航角βdを調整し、vdを相殺することで行うものとする。よって、潮流修正部42は、(21)式から斜航角βdを求める。
【0104】
3.2.2 u*に関して
潮流成分も含んだ指定旋回角速度r0*は
【0105】
【数36】
になる。ここで、SetΔu:速度更新設定値(例えば1knot)、u0*:前回の値とする。
【0106】
対地速度修正部44は、(15)式、(21)式、(16)式によって、得られた対地速度u*の変化がΔuを越えると、(22)式に従い、指定旋回角速度r0*を更新し、対地速度u*と共にそれを参照方位発生部30へと出力する。
【0107】
参照方位発生部30は、更新された指定旋回角速度r0*を満足する参照方位ψRを再計算する。その際の変針量は既に変針された方位分を差し引いた量、
【0108】
【数37】
になる。ここでψ0*:変化する指定変針量、Δψ0:計画航路の変針量、Δψ’R:既に変針された方位量である。
【0109】
3.3 フィードフォワード舵角
フィードフォワード舵角発生部46は、計画航路に船体航路を追跡させるために、参照舵角((7)式)に加えて潮流の斜航角に対応する潮流舵角δDを求める。
【0110】
潮流の斜航角βdに対応する潮流舵角δDは、(3)式または(4)式により、
【0111】
【数38】
により得られる。
【0112】
3.4 フィードフォワード修正
潮流の斜航角βdは、(21)式、(17)式に示されるように、閉ループ系のフィードバック制御部16内にある推定器18から得られる推定潮流成分d x^、dy^から求まるので、参照方位ψRに加算して、軌道航路誤差演算部14に出力すると、マイナーループが構成されて、制御系特性が変化してしまう。
【0113】
よって、βdは前方に帰還できないので、フィードフォワード舵角修正部48によって、後方で修正する。
【0114】
斜航角βdを前方に帰還した場合の軌道航路誤差演算部14で求まる偏差は、
【0115】
【数39】
になる。ここでψe =ψR−ψである。斜航角βdを含めたフィードバック舵角は、
【0116】
【数40】
になる。尚、フィードバックゲインGFBは、GFB=KP+KDsである。
【0117】
よってフィードバック舵角
【0118】
【数41】
による修正を実施すれば、前方のψR に帰還した場合と同等の応答特性、を得ることができる。
【0119】
フィードフォワード舵角修正部48は、フィードフォワード舵角発生部46で得られたフィードフォワード舵角に対して、潮流の斜航角βdに対してフィードバックゲインGFBを掛けたものを修正フィードバック舵角として、加算して修正する。
【0120】
4.フィードフォワード舵角の最大値
(17)式の潮流速度を整理すると、
【0121】
【数42】
となり、vdの導関数は、上式から、
【0122】
【数43】
となる。vdの2次微分は、コリオリ項(第2項)を含む。斜航角βd修正のための潮流舵角δDは、(24)式から
【0123】
【数44】
になる。ここで、(21)式、(28)式、(29)式による
【0124】
【数45】
の関係を用いている。
【0125】
フィードフォワード舵角δFFは、参照舵角δRと潮流舵角δDとの和になるので、
【0126】
【数46】
【0127】
になる。このδFFの採り得る大きさを検討すると、潮流方位と参照方位との偏差のsin、cosの極性によって変化し、その絶対値の最大値はδDがδRと同極性のときに生じる。
【0128】
Rψの大きさを調べる。安定船の場合で、(31)式の分母と分子に、(5)式、(11)式をそれぞれ代入すると、
【0129】
【数47】
を得る。ここで、T'a=Ta/Ts、r*0=ηa・Ta/6の関係を用いている。また、T'aの2乗項以上を省く。上式2つの比率をとると、
【0130】
【数48】
に近似することができる。以下表に2つの例(一方が通常例、他方が極端な例)を例示する。
【0131】
【表1】
【0132】
上記2例を(33)式に代入すると、
【0133】
【数49】
になり、数値例からはRψの範囲として、上記条件を満足することが示される。
【0134】
通常、Rψは0.1程度になる。(32)式の右辺のUd/uの係数において、
【0135】
【数50】
から、cosの項は、sinの項よりも支配的になると見なせるので、
【0136】
【数51】
に近似することができる。上式より、δFFは、cos(ψd−ψR)の値により増減し、その最大値は、
【0137】
【数52】
【0138】
になる。上式より潮流修正時のδFFがδ0を超える場合、操舵機の入力飽和を発生させる。よって、その不具合を防止するために、舵角設定部28で、既定の舵角設定値δ0に対して参照舵角設定値δ0Rを、次のように設定する。
【0139】
【数53】
参照舵角設定値δ0Rを参照方位発生部30へ出力することによって、フィードフォワード舵角δFFの最大値は、
【0140】
【数54】
になるため、入力飽和による不具合を回避することができる。舵角設定部28は、軌道計画が呼ばれる度に、U(=u)及びUdを求めて参照舵角設定値δ0Rを更新する。
または、(32)式において、同極性である2つの場合の、ψd−ψR=0、4/πの場合を考える。
【0141】
【数55】
【0142】
ここで、|xのxは、偏差ψd−ψRの値を示す。u*は偏差によって異なるので、δRの値も、異なることに留意されたい。また、実際のδRの最大値はψRが少し変化したときに生じるから(図5参照)、上記偏差の値と同じ訳ではない。
(38)式において、
【0143】
【数56】
の条件が満足されるものとすると、フィードフォワード舵角の最大値は、
【0144】
【数57】
になる。よって、舵角設定部28で、既定の舵角設定値δ0に対して参照舵角設定値δ0Rを、
【0145】
【数58】
に設定し、それを参照方位発生部30へ出力することによって、フィードフォワード舵角δFFの最大値は、
【0146】
【数59】
になるため、入力飽和による不具合を回避することができる。舵角設定部28は、軌道計画が呼ばれる度に、U(=u)及びUdを求めて参照舵角設定値δ0Rを更新する。
【0147】
5.数値計算例
参照舵角δRの参照舵角設定値δ0Rにより、FF舵角の最大値が|δFF|max ≦δ0を満足することを数値計算によって検証する。
【0148】
旋回条件は、(換算:1NM=1852m,1knot=0.5144m/s)
【0149】
【表2】
その他、U=20knot,Ud=5knot,R=1NMである。
【0150】
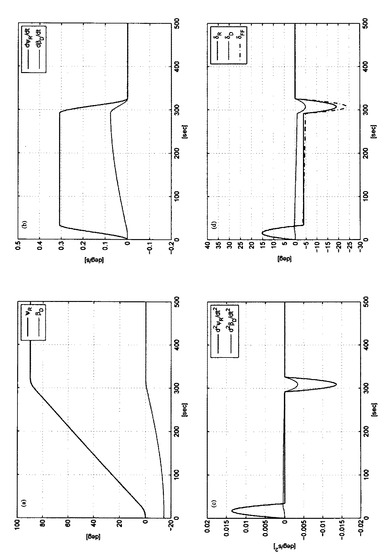
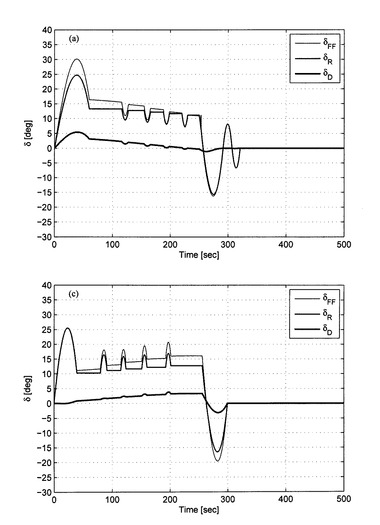
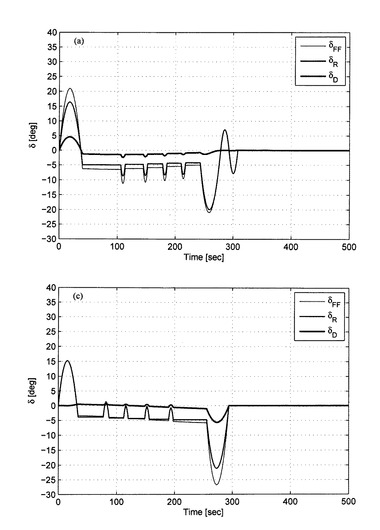
図7及び図8は、Δψ0=90deg、ψR1=40deg、ψR2=130deg、それぞれ安定船(δ0=30[deg]、ψd=ψR1)、不安定船(δ0=25[deg] 、ψd=ψR2)のときを示し、FF舵角δFFが舵角設定値δ0に収まっている。
【0151】
図9及び図10は、Δψ0=100[deg]、SetΔu=1knotとし、対地速度修正を行った場合で、(a)はψd=ψR1、(c)はψd=ψR2の場合である。安定船は(a)の場合、不安定船は(c)の場合でFF舵角δFFが最大となるが、FF舵角δFFは舵角設定値δ0に収まっている。
【符号の説明】
【0152】
10 船舶用自動操舵装置
12 軌道計画部
14 軌道航路誤差演算部
16 フィードバック制御部
18 推定器
20 フィードバックゲイン器
28 舵角設定部
30 参照方位発生部
34 参照速度発生部
36 参照位置発生部
40 座標変換部
42 潮流修正部
46 フィードフォワード舵角発生部
【特許請求の範囲】
【請求項1】
センサで検出された船速が入力され、計画航路に基づき参照信号を発生すると共に旋回時に計画航路の軌跡に乗せるためのフィードフォワード舵角を出力する軌道計画部と、該軌道計画部からの参照信号とセンサで検出された検出信号とから軌道誤差を演算する軌道航路誤差演算部と、該軌道誤差から推定潮流成分とフィードバック舵角を出力するフィードバック制御部とを備え、
前記フィードバック舵角と前記フィードフォワード舵角とによって操舵機に操舵を行わせる船舶用自動操舵装置において、
前記軌道計画部は、
計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部と、
前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行う座標変換部と、
前記座標変換部で座標変換された潮流成分から潮流に対抗する斜航角βdを求める潮流修正部と、
前記参照方位ψRにするための参照舵角δRと前記斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部と、
前記推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部と、
を備え、前記参照方位発生部は、前記参照舵角δRが前記舵角設定部で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生することを特徴とする船舶用自動操舵装置。
【請求項2】
前記舵角設定部は、既定の舵角設定値δ0に対して前記推定潮流成分を用いて修正することにより前記参照舵角設定値δ0Rを求めることを特徴とする請求項1記載の船舶用自動操舵装置。
【請求項3】
前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、船速Uとから、
【数1】
として求めることを特徴とする請求項2記載の船舶用自動操舵装置。
【請求項4】
前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、参照舵角δRを発生させるときの参照方位ψRと、潮流方位ψdと、船速Uとから、
【数2】
として求めることを特徴とする請求項2記載の船舶用自動操舵装置。
【請求項5】
前記潮流修正部は、前記潮流に対抗する斜航角βdを、
【数3】
から求めることを特徴とする請求項1ないし4のいずれか1項に記載の船舶用自動操舵装置。
【請求項6】
前記座標変換部は、前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行って参照方位方向の潮流成分を求めており、前記参照方位発生部は、該参照方位方向の潮流成分による対地速度の変化に応じて修正した指定旋回角速度を用いて計画航路に従う旋回を行うための参照方位を求めることを特徴とする請求項1ないし5のいずれか1項に記載の船舶用自動操舵装置。
【請求項1】
センサで検出された船速が入力され、計画航路に基づき参照信号を発生すると共に旋回時に計画航路の軌跡に乗せるためのフィードフォワード舵角を出力する軌道計画部と、該軌道計画部からの参照信号とセンサで検出された検出信号とから軌道誤差を演算する軌道航路誤差演算部と、該軌道誤差から推定潮流成分とフィードバック舵角を出力するフィードバック制御部とを備え、
前記フィードバック舵角と前記フィードフォワード舵角とによって操舵機に操舵を行わせる船舶用自動操舵装置において、
前記軌道計画部は、
計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部と、
前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行う座標変換部と、
前記座標変換部で座標変換された潮流成分から潮流に対抗する斜航角βdを求める潮流修正部と、
前記参照方位ψRにするための参照舵角δRと前記斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部と、
前記推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部と、
を備え、前記参照方位発生部は、前記参照舵角δRが前記舵角設定部で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生することを特徴とする船舶用自動操舵装置。
【請求項2】
前記舵角設定部は、既定の舵角設定値δ0に対して前記推定潮流成分を用いて修正することにより前記参照舵角設定値δ0Rを求めることを特徴とする請求項1記載の船舶用自動操舵装置。
【請求項3】
前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、船速Uとから、
【数1】
として求めることを特徴とする請求項2記載の船舶用自動操舵装置。
【請求項4】
前記参照舵角設定値δ0Rは、既定の舵角設定値δ0と、推定した潮流速度Udと、参照舵角δRを発生させるときの参照方位ψRと、潮流方位ψdと、船速Uとから、
【数2】
として求めることを特徴とする請求項2記載の船舶用自動操舵装置。
【請求項5】
前記潮流修正部は、前記潮流に対抗する斜航角βdを、
【数3】
から求めることを特徴とする請求項1ないし4のいずれか1項に記載の船舶用自動操舵装置。
【請求項6】
前記座標変換部は、前記推定潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行って参照方位方向の潮流成分を求めており、前記参照方位発生部は、該参照方位方向の潮流成分による対地速度の変化に応じて修正した指定旋回角速度を用いて計画航路に従う旋回を行うための参照方位を求めることを特徴とする請求項1ないし5のいずれか1項に記載の船舶用自動操舵装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−56658(P2013−56658A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2012−99079(P2012−99079)
【出願日】平成24年4月24日(2012.4.24)
【出願人】(000003388)東京計器株式会社 (103)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成24年4月24日(2012.4.24)
【出願人】(000003388)東京計器株式会社 (103)
[ Back to top ]