
苗移植機
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、走行装置を有する機体の後部に苗植付装置を備えた苗移植機に関する。
【背景技術】
【0002】
苗植付装置を機体後部に備えた苗移植機において、苗移植機が圃場を前進走行する際に移植機の直進走行の指標となるラインを引くために苗植付装置に線引きマーカを設けた構成が知られている(特許文献1)。
【0003】
また、苗移植機が圃場の畦際などで旋回終了して新たな植付条に沿って苗の植付作業を行うに当たり、苗移植機が旋回開始から設定された走行距離を走行し、又は苗移植機が旋回開始から所定の経過弛緩時間が経過するまでに苗植付装置が正しく作動できるように圃場に下降し、かつ苗植付装置を作動させるクラッチが入になっていなければ苗の植付動作を開始させないようにした構成が知られている(特許文献2)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−246409号公報
【特許文献2】特開2010−246506号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1、2記載の構成からなる苗移植機では、苗を積載し、苗を圃場に植え付ける苗植付装置は機体後部に配置されているため、作業者は積載した苗の状態を確認する際、操縦席から立ち上がらなければならず、その度に機体の進行を停止させる必要があり、作業能率が低下する問題がある。
【0006】
苗を植え付けるときは、一般的に苗移植機が直進走行することが望ましく、この直進の基準となる線を圃場面に形成する線引きマーカを備えており、この線引きマーカは苗移植機が旋回走行操作を行う際に、次の作業位置に線を引く方向のみ作動状態となる構成としている。
【0007】
しかしながら、圃場の土質によっては線引きマーカが接触しても、形成された溝が泥土によって埋め戻され、植付作業を行うときには線が消えてしまい進行方向が直線にならず、苗の植付精度が低下する問題がある。
【0008】
また、苗移植機により直進方向に植付が行えないと、苗の左右間隔が広がり過ぎ、苗が植え付けられないままの部分が生じる問題がある。たとえば、疎植栽培からすると間隔が広いとその分一株の成長が通常よりもよくなり、収量はあまり落ちないが、苗の植付位置が蛇行しているとコンバインで収穫する際に条合わせが困難になり、収穫作業の能率が低下する問題が生じる。
さらに、苗の左右間隔が狭まると、風通しが悪くなり、病害虫が発生しやすく、収穫量が減少してしまう問題がある。
【0009】
また、苗移植機が畦際で苗の植付作業をする際、畦際に雑草が繁茂して圃場と畦際の境界線が判断しづらくなると、機体を畦に寄せ過ぎてしまい、苗タンクや植付装置が畦に接触して破損する問題がある。前記接触を恐れて畦際を避けようとしながら苗移植機が苗の植付作業を行うと、苗の植付位置が畦際に隣接する苗の植付位置に近付いてしまい、風害や病害虫が発生しやすくなり、収穫量が減少してしまう問題がある。
【0010】
そこで、本発明の課題は、作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供することである。
【課題を解決するための手段】
【0011】
上記課題は、下記構成によって達成される。
すなわち、請求項1に係る発明は、圃場を走行する走行車体(2)と走行車体の操縦を行う操縦部(33)と苗を積載する複数条の苗タンク(51)と各苗タンク(51)から苗を取って圃場に植え付ける複数条の植付装置(52)(この植付装置(52)同士の左右間隔を制御装置に入力しておく。)を設けた苗移植機において、苗タンク(51)に、苗タンク(51)及び走行車体(2)後方の情報を検出する後部検出装置(CCDカメラ)(48)と後部検出装置(48)が検出した情報を表示する表示装置(ディスプレイ)(16)を操縦部(33)に配置し、後部検出装置(48)が検出した情報から苗の植付条列や畦際を判断する制御装置(100)と、制御装置(100)には、表示装置(16)に次の植付作業位置を示す第1植付仮想線(P1)及び圃場と畦際の境界線を示す第1畦際仮想線(L1)を出力する制御構成を設けたことを特徴とする苗移植機である。
【0012】
請求項2に係る発明は、苗タンク(51)の下部で且つ左右両側に防護体(64)を回動自在に装着し、制御装置(100)には、左右外側端部の植付装置(52)から機体外側方向に回動させた防護体(64)までの距離(事前に制御装置100に入力)に基づき、第2畦際仮想線(L2)を表示装置(16)に表示させる制御構成を設けたことを特徴とする苗移植機である。
【0013】
請求項3に係る発明は、特定の植付装置(52)の入切を操作する畦際操作部材(畦際クラッチ+畦際クラッチレバー17)と、畦際操作部材の操作を検知する操作検知部材(畦際スイッチ66は、畦際クラッチレバー17を切方向に操作すると「入」になる)と、制御装置(100)には、操作検知部材が「入」になると、植付装置(52)の通常の全植付位置の外側端部の仮想線(P1)よりも操作検知部材が「切」位置にある最畦際寄りに第2植付仮想線(P2)(畦際クラッチを切って作業する際、一番畦に近い一対の条の植付位置を示す)を表示する制御構成を設けたことを特徴とする苗移植機である。
【0014】
請求項4に係る発明は、走行車体(2)の両側に設けた圃場面に次の植付作業時に直進の目安となる線を形成する線引きマーカ(75)と、走行車体(2)が旋回する毎に線引きマーカ(75)の作動方向を切り替えるマーカ切替装置(67)と、制御装置(100)には、マーカ切替装置(67)が線引きマーカ(75)を線引き作動させた側の走行車体(2)の後部側方を後部検出装置(48)が検出する制御構成を設けたことを特徴とする苗移植機である。
【0015】
請求項5に係る発明は、制御装置(100)には、線引きマーカ(75)が作動した側の圃場面を後部検出装置(48)で検出し、植付装置(52)同士の左右距離に基づいて次の植付作業位置を示す第3植付仮想線(P3)(図7〜図9)を表示装置16に表示させる制御構成を設けたことを特徴とする苗移植機である。
【0016】
請求項6に係る発明は、制御装置(100)には、線引きマーカ(75)を作動させた側の圃場を後部検出装置(48)が検出し、この検出結果から表示装置(16)に第1畦際仮想線(P1)が表示されるとき、所定数(畦際操作部材+1)の植付装置(52)同士の左右距離に基づく第3畦際仮想線(P3)を次の植付作業位置に表示する制御構成を設けたことを特徴とする苗移植機である。
【0017】
請求項7に係る発明は、走行車体(2)の進行方向及び走行速度を変更する走行操作レバー(HSTレバー)(68)を設け、制御装置(100)には、走行操作レバー(68)を「前進」位置に操作すると後部検出装置(48)が苗タンク(51)の後方及び線引きマーカ(75)の作動側を検出し、走行操作レバー(68)を「後進」にすると後部検出装置(48)が苗タンク(51)の下部及び植付装置(52)を検出し、苗タンク(51)の下部及び植付装置(52)の位置から、苗タンク(51)を下降させたときに植付装置(52)が苗を植える第4植付仮想線(P4)を表示装置(16)に表示する制御構成を設けたことを特徴とする苗移植機である。
【発明の効果】
【0018】
請求項1記載の発明によれば、苗タンク(51)及び走行車体(2)の後部の情報を後部検出装置(48)で検出し、検出した情報を表示装置(16)に表示することにより、走行車体(2)の後方の苗の植付状態や苗タンク(51)に積載した苗の状態を操縦部(33)から移動することなく確認することができるので、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
また、苗切れのまま作業を継続し、苗が植え付けられない区間が生じることを防止できるので、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。
【0019】
さらに、検出した情報に基づいて制御装置(100)が次の植付位置を示す第1植付仮想線(P1)を表示装置(16)に出力することにより、この仮想線(P1)に苗タンク(51)の端部を合わせて走行すれば前の作業位置と並ぶ位置に苗を植え付けることができるので、圃場全体の苗の植付精度が向上し、苗の生育が良好になると共に、収穫作業が容易になる。
また、圃場と畦際の境界を第1畦際仮想線(L1)で示すことにより、苗タンク(51)を畦際に当てることなく作業を行うことができるので、苗タンク(51)の破損が防止されると共に、走行車体(2)が畦際に寄り過ぎることが防止され、苗の植付精度が向上する。
【0020】
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、左右外側端部の植付装置(52)から防護体(64)までの距離を基準に第2畦際仮想線(L2)を表示することにより、作業者は第1畦際仮想線(L1)と第2畦際仮想線(L2)のうち可能な限り畦際に接近可能な方を選んで作業をすることができるので、苗タンク(51)の破損が防止されると共に、畦際でも正常に直進することができ、苗の植付精度が向上する。
【0021】
請求項3記載の発明によれば、請求項1記載の発明の効果に加えて、操作検知部材(48)が「入」になると、植付装置(52)の通常の全植付位置の外側端部の仮想線よりも操作検知部材が「切」位置にある最畦際寄りに第2植付仮想線(P2)を表示することにより、次に苗の植え付けを行う畦際の作業幅を表示することができるので、畦際での植付作業能率が向上すると共に、走行車体(2)を畦に接触させて走行車体(2)が損傷することや隣接条の苗を踏み潰して苗を無駄にすることが防止される。
【0022】
請求項4記載の発明によれば、請求項1記載の発明の効果に加えて、線引きマーカ(75)が圃場面に線を形成できているかどうかを作業者が操縦部(33)から振り返らずに確認することができるので、確認のために減速したり停車したりする必要が無く、作業能率が向上する。また、マーカ切替装置(67)に連動して検出する範囲を自動的に変更することにより、作業者が後部検出装置(48)の切替操作を行う必要がなくなるので、操作性が向上する。
【0023】
請求項5記載の発明によれば、請求項1記載の発明の効果に加えて、次の作業位置を示す第3植付仮想線(P3)を表示装置(16)に表示することができるので、現在の第1植付仮想線(P1)と第3植付仮想線(P3)を参考にして植付作業を行うことができ、苗の植付精度が向上し、苗の生育が良好になる。また、第3植付仮想線(P3)を基準として、旋回後の位置合わせを行うことができるので、圃場に植え付けた苗同士の左右間隔が開き過ぎることを防止でき、圃場面積に対して適量の苗が植え付けられ、作物の収穫量が減ることが防止される。さらに、圃場に植え付けた苗同士の左右間隔が狭まり過ぎることを防止できるので、風害や病害虫による被害を抑えられ、作物の収穫量が減ることが防止される。
【0024】
なお、苗同士の間隔を狭くし過ぎると、風通しが悪く、害虫が棲み付きやすくなると共に、病気が発生すると連鎖的に広がりやすくなり、収穫量が悪化する。また、台風等による強風で倒れると連鎖的に他の稲を倒すため、コンバイン等を用いた収穫作業の手間が増大する。
【0025】
請求項6記載の発明によれば、請求項1記載の発明の効果に加えて、畦際周辺で植付作業をする際、どの畦際操作部材(畦際クラッチ+畦際クラッチレバー17)を使えばよいかを操縦部(33)から移動することなく判断することができるので、畦際操作部材(畦際クラッチ+畦際クラッチレバー17)を操作するタイミングが早く、苗の植え付けが行われない区間が生じることが防止され、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。また、畦際操作部材(畦際クラッチ+畦際クラッチレバー17)を操作するタイミングが遅く、苗を植える必要がない区間に苗を植えることを防止できるので、同じ箇所に重複して苗を植えることがなく、無駄な苗の発生が防止される。
【0026】
請求項7記載の発明によれば、請求項1記載の発明の効果に加えて、走行車体(2)の進行方向に合わせて後部検出装置(48)の検出範囲を変更することにより、進行方向に合わせた情報を検出することができるので、苗の植付方向を正確に把握できると共に、植付装置(52)で苗を押し倒すことが防止でき、苗の植付精度が向上する。また、後進時に第4植付仮想線(P4)を表示することにより、苗タンク(51)を下降させる際に下方に苗があるかどうかを作業者が操縦部(33)から振り返らずに把握することができるので、作業能率が向上すると共に、同じ位置に苗を重複して植え付けたり、苗を押し潰したりすることが防止されるため、無駄になる苗が減少する。
【図面の簡単な説明】
【0027】
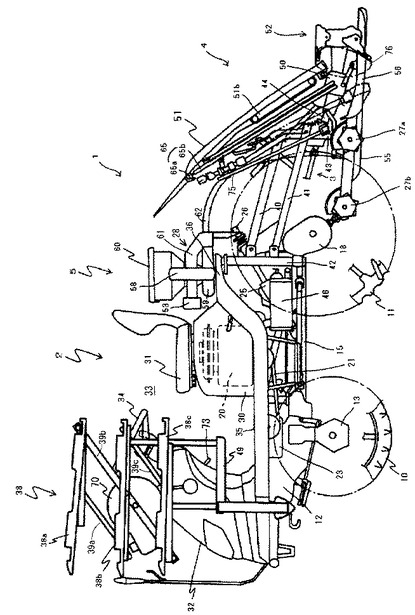
【図1】本発明の一実施形態の乗用型田植機の側面図である。
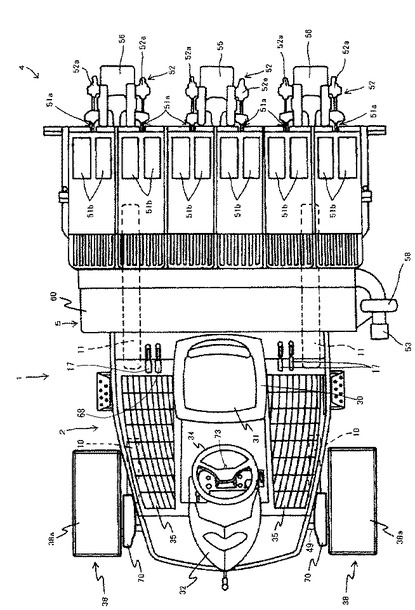
【図2】図1の乗用型田植機の平面図である。
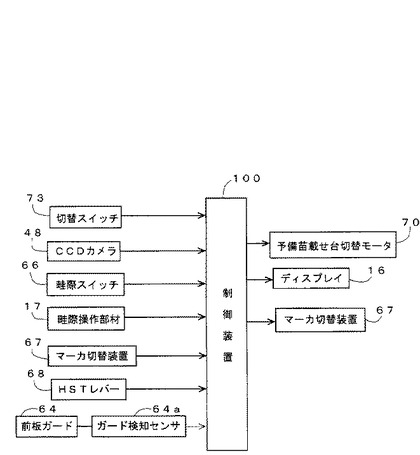
【図3】図1の乗用型田植機の予備苗載せ台の作動制御ブロック図である。
【図4】図1の乗用型田植機の畦際での旋回前と旋回後の苗植付仮想線を表示装置に表示する説明用の平面図である。
【図5】図1の乗用型田植機の畦際での旋回前の苗植付装置の作動停止用植付クラッチと旋回後の枕地一工程分の苗植付仮想線を表示装置に表示する説明用の平面図である。
【図6】図1の乗用型田植機の変速レバーの先端部分の側面図(図6(a))と背面図(図6(b))である。
【図7】図1の乗用型田植機の第3植付仮想線P3−2を示す平面図である。
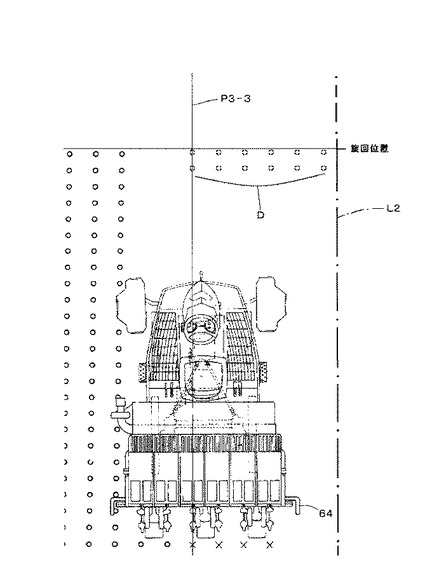
【図8】図1の乗用型田植機の第3植付仮想線P3−3を示す平面図である。
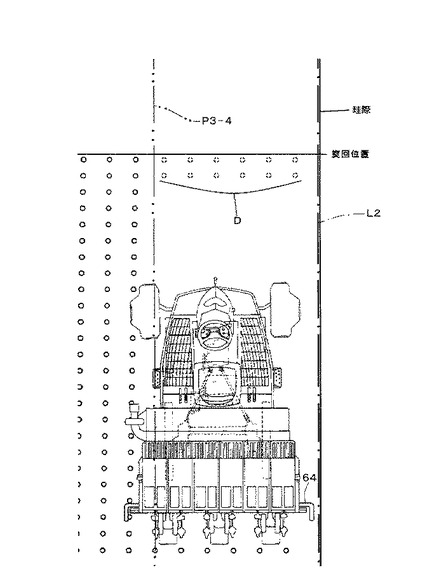
【図9】図1の乗用型田植機の第3植付仮想線P3−4を示す平面図である。
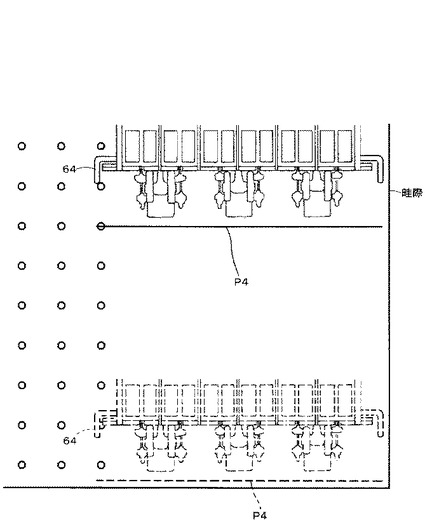
【図10】図1の乗用型田植機の第4植付仮想線P4を示す平面図である。
【発明を実施するための最良の形態】
【0028】
以下、図面に基づき、本発明の好ましい実施の形態について説明する。
図1及び図2は本発明の苗移植機の典型例である粉粒体繰出し装置として施肥装置を装着した乗用型田植機の側面図と平面図である。この施肥装置付き乗用型田植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に施肥装置5の本体部分が設けられている。搭乗オペレータが乗用型田植機の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向と後進方向をそれぞれ前、後という。
【0029】
走行車体2は、駆動輪である左右一対の前輪10,10及び左右一対の後輪11,11(走行装置)を備えた四輪駆動車両であって、機体の前部にミッションケース12が配置され、そのミッションケース12の左右側方に前輪ファイナルケース13,13が設けられ、該左右前輪ファイナルケース13,13の操向方向を変更可能な各々の前輪支持部から外向きに突出する左右前輪車軸に左右前輪10,10が各々取り付けられている。また、ミッションケース12の背面部にメインフレーム15の前端部が固着されており、そのメインフレーム15の後端左右中央部に前後水平に設けた後輪ローリング軸を支点にして後輪ギヤケース18,18がローリング自在に支持され、その後輪ギヤケース18,18から外向きに突出する後輪車軸に後輪11,11が取り付けられている。
【0030】
エンジン20はメインフレーム15の上に搭載されており、該エンジン20の回転動力が、ベルト伝動装置21及び油圧無段変速装置(HST)23を介してミッションケース12に伝達される。ミッションケース12に伝達された回転動力は、該ケース12内のトランスミッションにより変速された後、走行動力と外部取出動力に分離して取り出される。そして、走行動力は、一部が前輪ファイナルケース13,13に伝達されて前輪10,10を駆動すると共に、残りが後輪ギヤケース18,18に伝達されて後輪11,11を駆動する。また、外部取出動力は、走行車体2の後部に設けた植付クラッチケース25に伝達され、それから植付伝動軸26によって苗植付部4へ伝動されると共に、施肥伝動機構28によって施肥装置5へ伝動される。
【0031】
エンジン20の上部はエンジンカバー30で覆われており、その上に座席31が設置されている。座席31の前方には各種操作機構を内蔵するフロントカバー32があり、その上方に前輪10,10を操向操作するハンドル34が設けられており、この領域を操縦部33とする。エンジンカバー30及びフロントカバー32の下端左右両側は水平状のフロアステップ35になっている。フロアステップ35は一部格子状になっており(図2参照)、該ステップ35を歩く作業者の靴についた泥が圃場に落下するようになっている。フロアステップ35上の後部は、後輪フェンダを兼ねるリヤステップ36となっている。
【0032】
昇降リンク装置3は平行リンク機構であって、1本の上リンク40と左右一対の下リンク41,41を備えている。これらリンク40,41,41は、その基部側がメインフレーム15の後端部に立設した背面視門形のリンクベースフレーム42に回動自在に取り付けられ、その先端側に縦リンク43が連結されている。そして、縦リンク43の下端部に苗植付部4に回転自在に支承された連結軸44が挿入連結され、連結軸44を中心として苗植付部4がローリング自在に連結されている。
【0033】
メインフレーム15に固着した支持部材(図示せず)と上リンク40に一体形成したスイングアーム(図示せず)の先端部との間に昇降油圧式シリンダ46が設けられており、該シリンダ46を油圧で伸縮させることにより、上リンク40が上下に回動し、苗植付部4がほぼ一定姿勢のまま昇降する。
【0034】
苗植付部4は6条植の構成で、フレームを兼ねる伝動ケース50、マット苗を載せて左右往復動し、苗を一株分ずつ各条の苗取出口51a,…に供給すると共に横一列分の苗を全て苗取出口51a,…に供給すると苗送りベルト51b,…により苗を下方に移送する苗載せ台51、苗取出口51a,…に供給された苗を圃場に植付ける苗植付装置52,…、次行程における機体進路を表土面に線引きする左右一対の線引きマーカ75(図1)等を備えている。
【0035】
苗植付部4の下部には中央にセンターフロート55、その左右両側にサイドフロート56,56がそれぞれ設けられている。これらフロート55,56,56を圃場の泥面に接地させた状態で機体を進行させると、フロート55,56,56が泥面を整地しつつ滑走し、その整地跡に苗植付装置52,…により苗が植え付けられる。各フロート55,56,56は圃場表土面の凹凸に応じて前端側が上下動するように回動自在に取り付けられており、植付作業時にはセンターフロート55の前部の上下動が迎角制御センサ(図示せず)により検出され、その検出結果に応じ、前記昇降油圧式シリンダ46を制御する油圧バルブ(図示せず)を切り替えて苗植付部4を昇降させることにより、苗の植付深さを常に一定に維持する。
【0036】
施肥装置5は、肥料ホッパ60に貯留されている粒状の肥料を繰出部61,…によって一定量ずつ繰り出し、その肥料を施肥ホース62,…でフロート55,56,56の左右両側に取り付けた施肥ガイド(図示せず),…まで導き、施肥ガイド,…の前側に設けた作溝体76(図1),…によって苗植付条の側部近傍に形成される施肥溝内に落とし込むようになっている。ブロア用電動モータ53で駆動するブロア58で発生させたエアが、左右方向に長いエアチャンバ59を経由して施肥ホース62,…に吹き込まれ、施肥ホース62,…内の肥料を風圧で強制的に搬送するようになっている。
【0037】
苗植付部4には整地装置の一例であるロータ27(第1ロータ27aと第2ロータ27bの組み合わせを単にロータ27ということがある)が取り付けられている。また、苗載せ台51は苗植付部4の全体を支持する左右方向と上下方向に幅一杯の矩形の支持枠体65の支持ローラ65aをレールとして両側辺部材65bを左右方向にスライドする構成である。
また、走行車体2の前部左右両側には、補給用の苗を載せておく一対の予備苗載せ台38,38が機体の前後に張り出す位置と上下に並んだ位置とに回動可能に設けられている。
【0038】
一方の機体側面にある第1予備苗載せ台38a,第2予備苗載せ台38b,第3予備苗載せ台38cを上下三段に配置した場合の側面図を図1に示す。
予備苗載せ台38は走行車体2のフロアステップ35の下部に基部側を配置した支持機枠49に支持され、移動リンク部材39a,39b,39cを介してそれぞれ上下三段に構成され、第1予備苗載せ台38a、第2予備苗載せ台38b及び第3予備苗載せ台38cからなっている。
【0039】
移動リンク部材39bが機体に設けられた切替駆動装置(電動モータ)70の作動により回動することで、移動リンク部材39bに連結した予備苗載せ台38a,38b,38cが回動して、予備苗載せ台38a,38b,38cを図1に示す上下三段の積層状態と予備苗載せ台38a,38b,38cをほぼ同一平面上に展開させる展開状態に切り替え可能となる。該予備苗載せ台38a,38b,38cが回動して展開状態と積層状態とに切替操作手段として切替スイッチ73(ボタン、レバーでもよい)(図1,図2)を座席31近傍に設ける。
【0040】
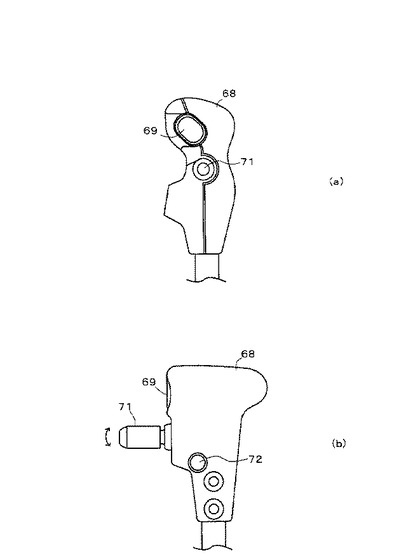
また、本実施例の6条植の植付クラッチ全体として、HST(走行)レバー68にボタンを設けている。苗植付装置52は、図6(a)の左側側面図と図6(b)の背面図に示すように、HST(走行)レバー68のグリップ部に設けた植付操作ボタン69を操作すると植付クラッチ(図示省略)が「入」となり、6条全ての植付装置52が作動する構成としている。なお、もう一度植付操作ボタン69を操作すると植付クラッチが「切」となり、6条全ての植付装置52が停止する。なお、HST(走行)レバー68には植付部昇降レバー71と、押すごとに植付部が所定量下降するボタン72を設けている。
【0041】
また畦際クラッチレバー17を操作すると、植付クラッチ機構のうち所定条の植付装置52への駆動力を入切する畦際クラッチ(図示省略)が「切」作動してそれぞれ対応する条の植付装置52の入切が行われる。
【0042】
さらに、畦際クラッチレバー17を切操作すると、畦際スイッチ66が連動して「入」になり、植付装置52の通常の全植付位置の外側端部の仮想線P1(図4)よりも畦際クラッチレバー7の「切」位置にある最畦際寄りの第2植付仮想線P2(図5)を表示する制御のための構成を制御装置100に設けているので、機体(走行車体)2が畦に接触しないように表示装置(ディスプレイ)16を監視しながら作業が行える。
【0043】
また、図3に示す本実施例で使用する制御装置100のブロック図を示す。
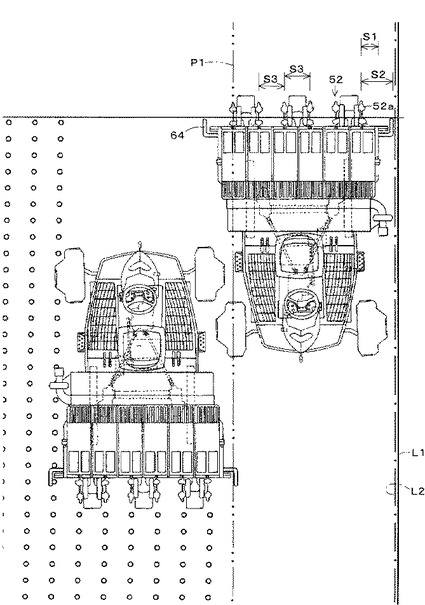
制御装置100には図4の左右隣接する植付装置52,52同士の第3の間隔S3(一つの植付装置52の一対の植付爪52a,52a同士の間隔と同じ)が設定されている。なお、本件の画像処理用のデータ算出のための間隔S3は、出荷時に制御装置100に入力されている。
【0044】
なお、左右端部の植付爪52aから苗タンク51の端部までの第1間隔S1と左右端部の植付爪52aから展開状態とした前板ガード64迄の第2間隔S2も制御装置100に予め入力されている。第1畦際仮想線L1は、前板ガード64を使わない場合に用いる線であり、左右どちらか一側端部の植付爪52aと苗タンク51の端部との第1間隔S1から第1畦際仮想線L1を算出し、前板ガード64を機体側方に回動させて使用状態としたときは、植付爪52aと前板ガード64との第2間隔S2から第2畦際仮想線L2を算出する。
【0045】
また、苗載せ台(苗タンク)51の要部と機体後方の画像情報を検出する後部検出用のCCDカメラ48を苗タンク51に取り付け、該CCDカメラ48が検出した情報は制御装置に入力され、操縦部33に配置されたディスプレイ16(図3にのみ図示)に表示される。
【0046】
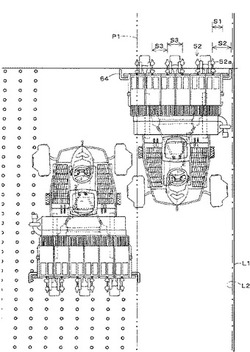
図4に6条植用の苗タンク51の要部平面図を示す。CCDカメラ48は苗タンク51の両側に機体後方を撮影することができる。
制御装置100は前記CCDカメラ48が検出した情報から苗の植付条列や畦際を判断することができる。
図4と図5は圃場の畦際で苗植付作業中の苗移植機1の苗タンク51の後端部と圃場を示す平面図である。
【0047】
なお、前記苗タンク51の左右両側で且つ後側下部に設ける回動支点を中心に、正面又は背面視でL字型の前板ガード64を回動自在に設ける。そして、該前板ガード64の基部には前板ガード64が機体外側に回動された使用状態であるか、機体内側(苗タンク51寄り)に回動された収納状態であるかを判別するガード検知センサ64aを設け、前記前板ガード64を収納状態としたときは、左側又は右側の最端部に配置する苗植付装置52と苗タンク51との第1間隔S1を用いて予測される旋回後の畦際位置を制御装置100に算出させ、その結果を第1畦際仮想線L1としてディスプレイ16の該当位置に表示する。
【0048】
そして、前記前板ガード64を使用状態としたときは、左側又は右側の最端部に配置する苗植付装置52と前板ガード64との第2間隔S2を用いて予測される旋回後の畦際位置を制御装置100に算出させ、その結果を第2畦際仮想線L2としてディスプレイ16の該当位置に表示する。
【0049】
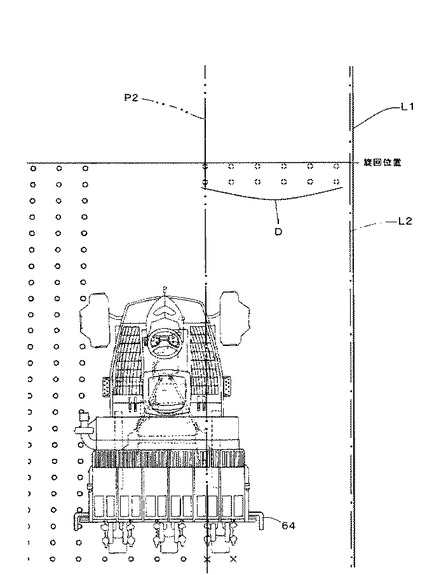
また、図5に示す畦際での枕地一工程分Dの植え付け時に機体旋回後に苗載せ台(苗タンク)51の畦際に最も遠い側の苗植付装置52の苗植付爪が圃場に差し込む植付苗の植付ラインを第1植付仮想線P1と呼び、図5に示す一部の畦クラッチを切りとして苗植付作業を行い、6条植の枕地一工程分のスペースDを残して、機体旋回後に苗載せ台(苗タンク)51の畦際に最も遠い側の苗植付装置52の苗植付爪が圃場に差し込む植付苗の植付ラインを第2植付仮想線P2と呼ぶことにする。
【0050】
そして、前記制御装置100は、操縦部33の表示装置(ディスプレイ)16に前記第1植付仮想線P1等及び圃場と畦際の境界線を示す第1畦際仮想線L1等を出力する制御構成を備えている。このとき左右端部の苗植付爪52aから苗タンク51の端部までの第1の間隔S1、左右端部の苗植付爪52aから展開状態の前板ガード64の端部までの第2の間隔S2及び苗植付爪52a同士の左右間隔である第3の間隔S3が入力されていれば、制御装置100により表示装置16(ディスプレイ)に前記第1植付仮想線P1等及び圃場と畦際の境界線を示す第1畦際仮想線L1等と共に間隔S1,S2及びS3に関係した部材、装置の位置関係を表示できる制御構成を備えている。
【0051】
苗タンク51及び走行車体2の後部の情報を後部検出用のCCDカメラ48で検出し、検出した情報を表示装置16に表示することにより、操縦者は走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができるので、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
【0052】
また、苗切れのまま作業を継続し、苗が植え付けられない区間が生じることを防止できるので、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。
さらに、検出した情報に基づいて制御装置100が次の植付位置を示す第1植付仮想線P1を表示装置16に出力することにより、この仮想線P1に苗タンク51の端部を合わせて走行すれば前の作業位置と並ぶ位置に苗を植え付けることができるので、圃場全体の苗の植付精度が向上し、苗の生育が良好になると共に、収穫作業が容易になる。
【0053】
また、圃場と畦際の境界を第1畦際仮想線L1で示すことにより、苗タンク51を畦際に当てることなく作業を行うことができるので、苗タンク51の破損が防止されると共に、走行車体2が畦際に寄り過ぎることが防止され、苗の植付精度が向上する。
【0054】
また、苗タンク51の下部で且つ左右両側に前板ガード(防護体)64を回動自在に装着し、制御装置100には、左右外側端部の植付装置52から機体外側方向に回動させた前板ガード64までの距離(事前に制御装置100に入力)に基づき、第2畦際仮想線L2を表示装置16に表示させる制御構成を設けている。
【0055】
従って、左右外側端部の植付装置52から前板ガード64までの第2の間隔S2を基準に第2畦際仮想線L2を表示することにより、作業者は第1畦際仮想線L1と第2畦際仮想線L2のうち可能な限り、畦際に接近可能な方を選んで作業をすることができるので、苗タンク51の破損が防止されると共に、畦際でも正常に直進することができ、苗の植付精度が向上する。
【0056】
さらに1つの畦際クラッチレバー17を操作することにより、決められた2つの苗植付装置52,52の入切を操作する畦際操作部材である畦際クラッチ(図示せず)と畦際クラッチレバー17の操作を検知する畦際スイッチ66(畦際クラッチレバー17を切方向に操作すると「入」になる。)を設けている。
【0057】
制御装置100には、前記畦際スイッチ66が「入」になると、植付装置52の通常の全植付位置の外側端部の仮想線P1(図4)よりも畦際スイッチ66が「切」位置にある図5に示す最畦際寄りに第2植付仮想線(P2)(畦際クラッチを切って作業する際に一番畦に近い2条分の植付位置を示す)を表示する制御構成を設けている。
【0058】
従って、畦際スイッチ66が「入」になると、植付装置52の通常の全植付位置の外側端部の仮想線P1よりも畦際スイッチ66が「切」位置にある最畦際寄りに第2植付仮想線P2を表示することにより、次に苗の植え付けを行う畦際の作業幅D(図5の枕地一工程分)を表示することができるので、畦際での植付作業能率が向上すると共に、走行車体(機体)2を畦に接触させて走行車体2が損傷することや隣接条の苗を踏み潰して苗を無駄にすることが防止される。
【0059】
また、走行車体(機体)2の両側に設けた圃場面に次の植付作業時に直進の目安となる線を形成する線引きマーカ75と走行車体2が旋回する毎に線引きマーカ75の作動方向を切り替えるマーカ切替装置67を設けており、制御装置100には、マーカ切替装置67が線引きマーカ75を線引き作動させた側の走行車体2の後部側方をCCDカメラ48が検出する制御構成を設けている。
【0060】
そのため線引きマーカ75が圃場面に線を形成できているかどうかを操縦部33から振り返ることなく確認することができるので、確認のために減速したり停車したりする必要が無く、作業能率が向上する。また、線引きマーカ75を線引き作動させた側の走行車体2の後部側方をCCDカメラ48が自動的に作動するので、作業者がCCDカメラ48の切替操作を行う必要がなくなるので、操作性が向上する。
【0061】
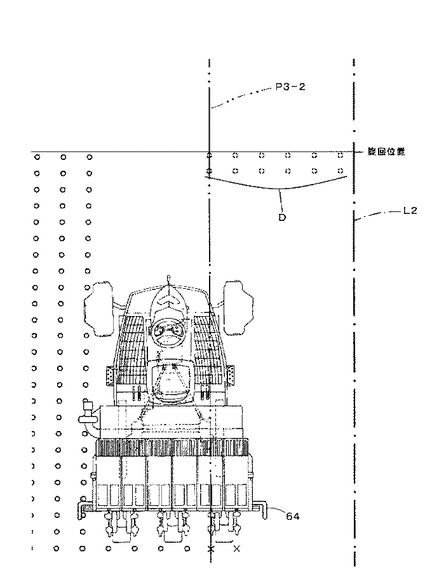
図7と図8に示すように、制御装置100には、線引きマーカ75が作動した側の圃場面をCCDカメラ48で検出し、隣接する2つの植付装置52の左右間隔S3に基づいて次の植付作業位置を示す第3植付仮想線P3(P3−1,P3−2,P3−3及びP3−4、以下単にP3と示すことがある)(全植付装置52の植付爪52aで苗の植付を行うとき、並びに畦際クラッチレバー17を1つまたは複数操作して、特定の植付装置52の植付爪52aが苗の植え付けを行う位置を示す仮想線のことを言う。)を表示装置16に表示させる制御構成を設けている。
【0062】
従って、次の作業位置を示す第3植付仮想線P3を表示装置16に表示することができ、現在の第1植付仮想線P1と第3植付仮想線P3を参考にして植付作業を行うことができるので、苗の植付精度が向上し、苗の生育が良好になる。
【0063】
また、第3植付仮想線P3を基準として、機体旋回後の位置合わせを行うことができるので、圃場に植え付けた苗同士の左右間隔が開き過ぎることを防止でき、圃場面積に対して適量の苗が植え付けられ、作物の収穫量が減ることが防止される。
また、圃場に植え付けた苗同士の左右間隔が狭まり過ぎることを防止できるので、風害や病害虫による被害を抑えられ、作物の収穫量が減ることが防止される。
このように苗同士の左右間隔が狭まり過ぎると、風通しが悪く、害虫が棲み付きやすくなると共に、病気が発生すると連鎖的に広がりやすくなり収穫量が悪化し、また、台風等による強風で倒れると連鎖的に他の稲を倒すため、コンバイン等を用いた収穫作業の手間が増大する。
【0064】
制御装置100には、線引きマーカ72を作動させた側の圃場をCCDカメラ48が検出し、この検出結果から表示装置16に第1畦際仮想線P1が表示されるとき、隣接する2つの植付装置52の左右間隔である第3の間隔S3(図4参照)に基づく第3畦際仮想線P3を所定数の畦際クラッチレバー17を次の植付作業位置に表示する制御構成を設けることができる。
【0065】
前記制御構成により、図7〜図9に示す複数の第3畦際仮想線P3−1,P3−2,P3−3及びP3−4のうち、どの線が第1畦際仮想線L1と同じ位置に表示されるかで、畦際クラッチをどこまで操作するかを次のように判断できる。
なお、P3−1は下記のとおり、第1植付仮想線P1と同一位置なので図示を省略する。
【0066】
(1)畦際に最も近い第3植付仮想線P3−1:全条分の植付装置を用いるため、旋回前は畦際クラッチをどれも操作しない。
なお、第3植付仮想線P3−1は、第1植付仮想線P1と同じ位置に出る。
(2)畦際から数えて2番目の第3植付仮想線P3−2:畦際クラッチを1つ操作する。なお、3条や4条植の作業機においては、畦際クラッチレバー17は2つ設けられるが、両方の畦際クラッチレバー17を操作すると植付クラッチを切った状態と同じ状態となるため、第3植付仮想線P3−3で示す制御は行われない。
また、第3植付仮想線P3−2は、第2植付仮想線P2と同じ位置に出る。
【0067】
(3)畦際から数えて3番目の第3植付仮想線P3−3:畦際クラッチを1つ操作する。なお、7条や8条植においては、畦際クラッチレバー17は4つ以上設けられ、10条植においては5本設けられる。このため、7,8条では畦際から数えて4番目の第3植付仮想線P3−3−1、10条では畦際から数えて5番目の第3植付仮想線P3−3−2となる。
(4)畦際から最も離れた第3植付仮想線P3−4:既に畦の傍にいるため、畦際クラッチをどれも操作しない。
【0068】
畦際周辺で植付作業をする際、どの畦際クラッチレバー17を操作すればよいかを操縦部33から移動することなく判断することができるので、畦際クラッチレバー17を操作するタイミングが早く、苗の植え付けが行われない区間が生じることが防止され、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。
また、畦際クラッチレバー17を操作するタイミングが遅く、苗を植える必要がない区間に苗を植えることを防止できるので、同じ箇所に重複して苗を植えることがなく、無駄な苗の発生が防止される。
【0069】
また機体(走行車体)2の進行方向及び走行速度を変更するHST(走行)レバー68を設けている場合、制御装置100には、HST(走行)レバー68を「前進」位置に操作するとCCDカメラ48が苗タンク51の後方及び線引きマーカ75の作動側を検出し、HST(走行)レバー68を「後進」にするとCCDカメラ48が苗タンク51の下部及び植付装置52を検出し、苗タンク51の下部及び植付装置52の位置から、苗タンク51を下降させたときに植付装置52が苗を植える第4植付仮想線(P4)(図10)を表示装置16に表示する制御構成を設けている。
【0070】
該第4植付仮想線P4は、制御装置100に予め記録されている、上リンク40及び下リンク41,41の前後長さに基づく苗植付部4を下降させたときに後端部が位置する場所であり、HST(走行)レバー68を「後進」に操作すると苗植付部4の後端下部付近と共に表示装置16に表示する仮想線である。この第4植付仮想線P4は、機体の後進に合わせて表示位置が逐次変更されるものとし、この線を表示装置16に投影されている圃場の畦際(この畦際は仮想線ではなく、表示装置16に写る映像を見て、作業者が判断する。)に合わせて下降させると、苗植付部4の後端下部が畦際に接触せず、且つ畦際との間隔が殆ど生じない位置に接地する。
【0071】
上記構成により機体(走行車体)2の進行方向に合わせてCCDカメラ48の検出範囲を変更することにより、進行方向に合わせた情報を検出することができるので、苗の植付方向を正確に把握できると共に、植付装置52で苗を押し倒すことが防止でき、苗の植付精度が向上する。
【0072】
後進時に第4植付仮想線P4を表示することにより、苗タンク51を下降させる際に下方に苗があるかどうかを操縦部33から振り返ることなく把握することができるので、作業能率が向上すると共に、同じ位置に苗を重複して植え付けたり、苗を押し潰したりすることが防止されるため、無駄になる苗が減少する。
また、畦際に苗植付部4を間隔を殆ど空けることなく接近させることができるので、畦際近くまで苗を植え付けることができ、作業者が圃場の空いた部分に手作業で苗を植え付ける作業が不要となり、作業者の労力が軽減される。
【産業上の利用可能性】
【0073】
本発明の苗移植機は、田植機に限らず、野菜苗などのその他の苗を植え付ける苗移植機として利用可能性がある。
【符号の説明】
【0074】
1 施肥装置付き乗用型田植機 2 走行車体
3 昇降リンク装置 4 苗植付部
5 粉粒体繰出し装置(施肥装置) 10 前輪
11 後輪 12 ミッションケース
13 前輪ファイナルケース 15 メインフレーム
16 表示装置(ディスプレイ) 17 畦際操作レバー
18 後輪ギヤケース 20 エンジン
21 ベルト伝動装置 23 油圧無段変速装置(HST)
25 植付クラッチケース 26 植付伝動軸
27(27a,27b) ロータ 28 施肥伝動機構
30 エンジンカバー 31 座席
32 フロントカバー 33 操縦部
34 ハンドル 35 フロアステップ
36 リヤステップ
38a,38b,38c 第1〜第3予備苗載せ台
39a,39b,39c 第1〜第3移動リンク部材
40 上リンク 41 下リンク
42 リンクベースフレーム 43 縦リンク
44 連結軸 46 昇降油圧式シリンダ
48 後部検出部材(CCDカメラ) 49 支持機枠
50 伝動ケース 51 苗載せ台
51a 苗取出口 51b 苗送りベルト
52 苗植付装置 52a 植付爪
53 ブロア用電動モータ 55 センターフロート
56 サイドフロート 58 ブロア
59 エアチャンバ 60 肥料ホッパ
61 繰出部 62 施肥ホース
64 前板ガード(防護体) 64a ガード検知センサ
65 支持枠体 65a 支持ローラ
65b 両側辺部材 66 畦際スイッチ
67 マーカ切替装置 68 HST(走行)レバー
69 植付操作ボタン 70 予備苗載せ台切替駆動装置
71 植付部昇降レバー 72 定量下降ボタン
73 切替スイッチ 75 線引きマーカ
76 作溝体 100 制御装置
【技術分野】
【0001】
この発明は、走行装置を有する機体の後部に苗植付装置を備えた苗移植機に関する。
【背景技術】
【0002】
苗植付装置を機体後部に備えた苗移植機において、苗移植機が圃場を前進走行する際に移植機の直進走行の指標となるラインを引くために苗植付装置に線引きマーカを設けた構成が知られている(特許文献1)。
【0003】
また、苗移植機が圃場の畦際などで旋回終了して新たな植付条に沿って苗の植付作業を行うに当たり、苗移植機が旋回開始から設定された走行距離を走行し、又は苗移植機が旋回開始から所定の経過弛緩時間が経過するまでに苗植付装置が正しく作動できるように圃場に下降し、かつ苗植付装置を作動させるクラッチが入になっていなければ苗の植付動作を開始させないようにした構成が知られている(特許文献2)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−246409号公報
【特許文献2】特開2010−246506号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1、2記載の構成からなる苗移植機では、苗を積載し、苗を圃場に植え付ける苗植付装置は機体後部に配置されているため、作業者は積載した苗の状態を確認する際、操縦席から立ち上がらなければならず、その度に機体の進行を停止させる必要があり、作業能率が低下する問題がある。
【0006】
苗を植え付けるときは、一般的に苗移植機が直進走行することが望ましく、この直進の基準となる線を圃場面に形成する線引きマーカを備えており、この線引きマーカは苗移植機が旋回走行操作を行う際に、次の作業位置に線を引く方向のみ作動状態となる構成としている。
【0007】
しかしながら、圃場の土質によっては線引きマーカが接触しても、形成された溝が泥土によって埋め戻され、植付作業を行うときには線が消えてしまい進行方向が直線にならず、苗の植付精度が低下する問題がある。
【0008】
また、苗移植機により直進方向に植付が行えないと、苗の左右間隔が広がり過ぎ、苗が植え付けられないままの部分が生じる問題がある。たとえば、疎植栽培からすると間隔が広いとその分一株の成長が通常よりもよくなり、収量はあまり落ちないが、苗の植付位置が蛇行しているとコンバインで収穫する際に条合わせが困難になり、収穫作業の能率が低下する問題が生じる。
さらに、苗の左右間隔が狭まると、風通しが悪くなり、病害虫が発生しやすく、収穫量が減少してしまう問題がある。
【0009】
また、苗移植機が畦際で苗の植付作業をする際、畦際に雑草が繁茂して圃場と畦際の境界線が判断しづらくなると、機体を畦に寄せ過ぎてしまい、苗タンクや植付装置が畦に接触して破損する問題がある。前記接触を恐れて畦際を避けようとしながら苗移植機が苗の植付作業を行うと、苗の植付位置が畦際に隣接する苗の植付位置に近付いてしまい、風害や病害虫が発生しやすくなり、収穫量が減少してしまう問題がある。
【0010】
そこで、本発明の課題は、作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供することである。
【課題を解決するための手段】
【0011】
上記課題は、下記構成によって達成される。
すなわち、請求項1に係る発明は、圃場を走行する走行車体(2)と走行車体の操縦を行う操縦部(33)と苗を積載する複数条の苗タンク(51)と各苗タンク(51)から苗を取って圃場に植え付ける複数条の植付装置(52)(この植付装置(52)同士の左右間隔を制御装置に入力しておく。)を設けた苗移植機において、苗タンク(51)に、苗タンク(51)及び走行車体(2)後方の情報を検出する後部検出装置(CCDカメラ)(48)と後部検出装置(48)が検出した情報を表示する表示装置(ディスプレイ)(16)を操縦部(33)に配置し、後部検出装置(48)が検出した情報から苗の植付条列や畦際を判断する制御装置(100)と、制御装置(100)には、表示装置(16)に次の植付作業位置を示す第1植付仮想線(P1)及び圃場と畦際の境界線を示す第1畦際仮想線(L1)を出力する制御構成を設けたことを特徴とする苗移植機である。
【0012】
請求項2に係る発明は、苗タンク(51)の下部で且つ左右両側に防護体(64)を回動自在に装着し、制御装置(100)には、左右外側端部の植付装置(52)から機体外側方向に回動させた防護体(64)までの距離(事前に制御装置100に入力)に基づき、第2畦際仮想線(L2)を表示装置(16)に表示させる制御構成を設けたことを特徴とする苗移植機である。
【0013】
請求項3に係る発明は、特定の植付装置(52)の入切を操作する畦際操作部材(畦際クラッチ+畦際クラッチレバー17)と、畦際操作部材の操作を検知する操作検知部材(畦際スイッチ66は、畦際クラッチレバー17を切方向に操作すると「入」になる)と、制御装置(100)には、操作検知部材が「入」になると、植付装置(52)の通常の全植付位置の外側端部の仮想線(P1)よりも操作検知部材が「切」位置にある最畦際寄りに第2植付仮想線(P2)(畦際クラッチを切って作業する際、一番畦に近い一対の条の植付位置を示す)を表示する制御構成を設けたことを特徴とする苗移植機である。
【0014】
請求項4に係る発明は、走行車体(2)の両側に設けた圃場面に次の植付作業時に直進の目安となる線を形成する線引きマーカ(75)と、走行車体(2)が旋回する毎に線引きマーカ(75)の作動方向を切り替えるマーカ切替装置(67)と、制御装置(100)には、マーカ切替装置(67)が線引きマーカ(75)を線引き作動させた側の走行車体(2)の後部側方を後部検出装置(48)が検出する制御構成を設けたことを特徴とする苗移植機である。
【0015】
請求項5に係る発明は、制御装置(100)には、線引きマーカ(75)が作動した側の圃場面を後部検出装置(48)で検出し、植付装置(52)同士の左右距離に基づいて次の植付作業位置を示す第3植付仮想線(P3)(図7〜図9)を表示装置16に表示させる制御構成を設けたことを特徴とする苗移植機である。
【0016】
請求項6に係る発明は、制御装置(100)には、線引きマーカ(75)を作動させた側の圃場を後部検出装置(48)が検出し、この検出結果から表示装置(16)に第1畦際仮想線(P1)が表示されるとき、所定数(畦際操作部材+1)の植付装置(52)同士の左右距離に基づく第3畦際仮想線(P3)を次の植付作業位置に表示する制御構成を設けたことを特徴とする苗移植機である。
【0017】
請求項7に係る発明は、走行車体(2)の進行方向及び走行速度を変更する走行操作レバー(HSTレバー)(68)を設け、制御装置(100)には、走行操作レバー(68)を「前進」位置に操作すると後部検出装置(48)が苗タンク(51)の後方及び線引きマーカ(75)の作動側を検出し、走行操作レバー(68)を「後進」にすると後部検出装置(48)が苗タンク(51)の下部及び植付装置(52)を検出し、苗タンク(51)の下部及び植付装置(52)の位置から、苗タンク(51)を下降させたときに植付装置(52)が苗を植える第4植付仮想線(P4)を表示装置(16)に表示する制御構成を設けたことを特徴とする苗移植機である。
【発明の効果】
【0018】
請求項1記載の発明によれば、苗タンク(51)及び走行車体(2)の後部の情報を後部検出装置(48)で検出し、検出した情報を表示装置(16)に表示することにより、走行車体(2)の後方の苗の植付状態や苗タンク(51)に積載した苗の状態を操縦部(33)から移動することなく確認することができるので、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
また、苗切れのまま作業を継続し、苗が植え付けられない区間が生じることを防止できるので、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。
【0019】
さらに、検出した情報に基づいて制御装置(100)が次の植付位置を示す第1植付仮想線(P1)を表示装置(16)に出力することにより、この仮想線(P1)に苗タンク(51)の端部を合わせて走行すれば前の作業位置と並ぶ位置に苗を植え付けることができるので、圃場全体の苗の植付精度が向上し、苗の生育が良好になると共に、収穫作業が容易になる。
また、圃場と畦際の境界を第1畦際仮想線(L1)で示すことにより、苗タンク(51)を畦際に当てることなく作業を行うことができるので、苗タンク(51)の破損が防止されると共に、走行車体(2)が畦際に寄り過ぎることが防止され、苗の植付精度が向上する。
【0020】
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、左右外側端部の植付装置(52)から防護体(64)までの距離を基準に第2畦際仮想線(L2)を表示することにより、作業者は第1畦際仮想線(L1)と第2畦際仮想線(L2)のうち可能な限り畦際に接近可能な方を選んで作業をすることができるので、苗タンク(51)の破損が防止されると共に、畦際でも正常に直進することができ、苗の植付精度が向上する。
【0021】
請求項3記載の発明によれば、請求項1記載の発明の効果に加えて、操作検知部材(48)が「入」になると、植付装置(52)の通常の全植付位置の外側端部の仮想線よりも操作検知部材が「切」位置にある最畦際寄りに第2植付仮想線(P2)を表示することにより、次に苗の植え付けを行う畦際の作業幅を表示することができるので、畦際での植付作業能率が向上すると共に、走行車体(2)を畦に接触させて走行車体(2)が損傷することや隣接条の苗を踏み潰して苗を無駄にすることが防止される。
【0022】
請求項4記載の発明によれば、請求項1記載の発明の効果に加えて、線引きマーカ(75)が圃場面に線を形成できているかどうかを作業者が操縦部(33)から振り返らずに確認することができるので、確認のために減速したり停車したりする必要が無く、作業能率が向上する。また、マーカ切替装置(67)に連動して検出する範囲を自動的に変更することにより、作業者が後部検出装置(48)の切替操作を行う必要がなくなるので、操作性が向上する。
【0023】
請求項5記載の発明によれば、請求項1記載の発明の効果に加えて、次の作業位置を示す第3植付仮想線(P3)を表示装置(16)に表示することができるので、現在の第1植付仮想線(P1)と第3植付仮想線(P3)を参考にして植付作業を行うことができ、苗の植付精度が向上し、苗の生育が良好になる。また、第3植付仮想線(P3)を基準として、旋回後の位置合わせを行うことができるので、圃場に植え付けた苗同士の左右間隔が開き過ぎることを防止でき、圃場面積に対して適量の苗が植え付けられ、作物の収穫量が減ることが防止される。さらに、圃場に植え付けた苗同士の左右間隔が狭まり過ぎることを防止できるので、風害や病害虫による被害を抑えられ、作物の収穫量が減ることが防止される。
【0024】
なお、苗同士の間隔を狭くし過ぎると、風通しが悪く、害虫が棲み付きやすくなると共に、病気が発生すると連鎖的に広がりやすくなり、収穫量が悪化する。また、台風等による強風で倒れると連鎖的に他の稲を倒すため、コンバイン等を用いた収穫作業の手間が増大する。
【0025】
請求項6記載の発明によれば、請求項1記載の発明の効果に加えて、畦際周辺で植付作業をする際、どの畦際操作部材(畦際クラッチ+畦際クラッチレバー17)を使えばよいかを操縦部(33)から移動することなく判断することができるので、畦際操作部材(畦際クラッチ+畦際クラッチレバー17)を操作するタイミングが早く、苗の植え付けが行われない区間が生じることが防止され、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。また、畦際操作部材(畦際クラッチ+畦際クラッチレバー17)を操作するタイミングが遅く、苗を植える必要がない区間に苗を植えることを防止できるので、同じ箇所に重複して苗を植えることがなく、無駄な苗の発生が防止される。
【0026】
請求項7記載の発明によれば、請求項1記載の発明の効果に加えて、走行車体(2)の進行方向に合わせて後部検出装置(48)の検出範囲を変更することにより、進行方向に合わせた情報を検出することができるので、苗の植付方向を正確に把握できると共に、植付装置(52)で苗を押し倒すことが防止でき、苗の植付精度が向上する。また、後進時に第4植付仮想線(P4)を表示することにより、苗タンク(51)を下降させる際に下方に苗があるかどうかを作業者が操縦部(33)から振り返らずに把握することができるので、作業能率が向上すると共に、同じ位置に苗を重複して植え付けたり、苗を押し潰したりすることが防止されるため、無駄になる苗が減少する。
【図面の簡単な説明】
【0027】
【図1】本発明の一実施形態の乗用型田植機の側面図である。
【図2】図1の乗用型田植機の平面図である。
【図3】図1の乗用型田植機の予備苗載せ台の作動制御ブロック図である。
【図4】図1の乗用型田植機の畦際での旋回前と旋回後の苗植付仮想線を表示装置に表示する説明用の平面図である。
【図5】図1の乗用型田植機の畦際での旋回前の苗植付装置の作動停止用植付クラッチと旋回後の枕地一工程分の苗植付仮想線を表示装置に表示する説明用の平面図である。
【図6】図1の乗用型田植機の変速レバーの先端部分の側面図(図6(a))と背面図(図6(b))である。
【図7】図1の乗用型田植機の第3植付仮想線P3−2を示す平面図である。
【図8】図1の乗用型田植機の第3植付仮想線P3−3を示す平面図である。
【図9】図1の乗用型田植機の第3植付仮想線P3−4を示す平面図である。
【図10】図1の乗用型田植機の第4植付仮想線P4を示す平面図である。
【発明を実施するための最良の形態】
【0028】
以下、図面に基づき、本発明の好ましい実施の形態について説明する。
図1及び図2は本発明の苗移植機の典型例である粉粒体繰出し装置として施肥装置を装着した乗用型田植機の側面図と平面図である。この施肥装置付き乗用型田植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に施肥装置5の本体部分が設けられている。搭乗オペレータが乗用型田植機の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向と後進方向をそれぞれ前、後という。
【0029】
走行車体2は、駆動輪である左右一対の前輪10,10及び左右一対の後輪11,11(走行装置)を備えた四輪駆動車両であって、機体の前部にミッションケース12が配置され、そのミッションケース12の左右側方に前輪ファイナルケース13,13が設けられ、該左右前輪ファイナルケース13,13の操向方向を変更可能な各々の前輪支持部から外向きに突出する左右前輪車軸に左右前輪10,10が各々取り付けられている。また、ミッションケース12の背面部にメインフレーム15の前端部が固着されており、そのメインフレーム15の後端左右中央部に前後水平に設けた後輪ローリング軸を支点にして後輪ギヤケース18,18がローリング自在に支持され、その後輪ギヤケース18,18から外向きに突出する後輪車軸に後輪11,11が取り付けられている。
【0030】
エンジン20はメインフレーム15の上に搭載されており、該エンジン20の回転動力が、ベルト伝動装置21及び油圧無段変速装置(HST)23を介してミッションケース12に伝達される。ミッションケース12に伝達された回転動力は、該ケース12内のトランスミッションにより変速された後、走行動力と外部取出動力に分離して取り出される。そして、走行動力は、一部が前輪ファイナルケース13,13に伝達されて前輪10,10を駆動すると共に、残りが後輪ギヤケース18,18に伝達されて後輪11,11を駆動する。また、外部取出動力は、走行車体2の後部に設けた植付クラッチケース25に伝達され、それから植付伝動軸26によって苗植付部4へ伝動されると共に、施肥伝動機構28によって施肥装置5へ伝動される。
【0031】
エンジン20の上部はエンジンカバー30で覆われており、その上に座席31が設置されている。座席31の前方には各種操作機構を内蔵するフロントカバー32があり、その上方に前輪10,10を操向操作するハンドル34が設けられており、この領域を操縦部33とする。エンジンカバー30及びフロントカバー32の下端左右両側は水平状のフロアステップ35になっている。フロアステップ35は一部格子状になっており(図2参照)、該ステップ35を歩く作業者の靴についた泥が圃場に落下するようになっている。フロアステップ35上の後部は、後輪フェンダを兼ねるリヤステップ36となっている。
【0032】
昇降リンク装置3は平行リンク機構であって、1本の上リンク40と左右一対の下リンク41,41を備えている。これらリンク40,41,41は、その基部側がメインフレーム15の後端部に立設した背面視門形のリンクベースフレーム42に回動自在に取り付けられ、その先端側に縦リンク43が連結されている。そして、縦リンク43の下端部に苗植付部4に回転自在に支承された連結軸44が挿入連結され、連結軸44を中心として苗植付部4がローリング自在に連結されている。
【0033】
メインフレーム15に固着した支持部材(図示せず)と上リンク40に一体形成したスイングアーム(図示せず)の先端部との間に昇降油圧式シリンダ46が設けられており、該シリンダ46を油圧で伸縮させることにより、上リンク40が上下に回動し、苗植付部4がほぼ一定姿勢のまま昇降する。
【0034】
苗植付部4は6条植の構成で、フレームを兼ねる伝動ケース50、マット苗を載せて左右往復動し、苗を一株分ずつ各条の苗取出口51a,…に供給すると共に横一列分の苗を全て苗取出口51a,…に供給すると苗送りベルト51b,…により苗を下方に移送する苗載せ台51、苗取出口51a,…に供給された苗を圃場に植付ける苗植付装置52,…、次行程における機体進路を表土面に線引きする左右一対の線引きマーカ75(図1)等を備えている。
【0035】
苗植付部4の下部には中央にセンターフロート55、その左右両側にサイドフロート56,56がそれぞれ設けられている。これらフロート55,56,56を圃場の泥面に接地させた状態で機体を進行させると、フロート55,56,56が泥面を整地しつつ滑走し、その整地跡に苗植付装置52,…により苗が植え付けられる。各フロート55,56,56は圃場表土面の凹凸に応じて前端側が上下動するように回動自在に取り付けられており、植付作業時にはセンターフロート55の前部の上下動が迎角制御センサ(図示せず)により検出され、その検出結果に応じ、前記昇降油圧式シリンダ46を制御する油圧バルブ(図示せず)を切り替えて苗植付部4を昇降させることにより、苗の植付深さを常に一定に維持する。
【0036】
施肥装置5は、肥料ホッパ60に貯留されている粒状の肥料を繰出部61,…によって一定量ずつ繰り出し、その肥料を施肥ホース62,…でフロート55,56,56の左右両側に取り付けた施肥ガイド(図示せず),…まで導き、施肥ガイド,…の前側に設けた作溝体76(図1),…によって苗植付条の側部近傍に形成される施肥溝内に落とし込むようになっている。ブロア用電動モータ53で駆動するブロア58で発生させたエアが、左右方向に長いエアチャンバ59を経由して施肥ホース62,…に吹き込まれ、施肥ホース62,…内の肥料を風圧で強制的に搬送するようになっている。
【0037】
苗植付部4には整地装置の一例であるロータ27(第1ロータ27aと第2ロータ27bの組み合わせを単にロータ27ということがある)が取り付けられている。また、苗載せ台51は苗植付部4の全体を支持する左右方向と上下方向に幅一杯の矩形の支持枠体65の支持ローラ65aをレールとして両側辺部材65bを左右方向にスライドする構成である。
また、走行車体2の前部左右両側には、補給用の苗を載せておく一対の予備苗載せ台38,38が機体の前後に張り出す位置と上下に並んだ位置とに回動可能に設けられている。
【0038】
一方の機体側面にある第1予備苗載せ台38a,第2予備苗載せ台38b,第3予備苗載せ台38cを上下三段に配置した場合の側面図を図1に示す。
予備苗載せ台38は走行車体2のフロアステップ35の下部に基部側を配置した支持機枠49に支持され、移動リンク部材39a,39b,39cを介してそれぞれ上下三段に構成され、第1予備苗載せ台38a、第2予備苗載せ台38b及び第3予備苗載せ台38cからなっている。
【0039】
移動リンク部材39bが機体に設けられた切替駆動装置(電動モータ)70の作動により回動することで、移動リンク部材39bに連結した予備苗載せ台38a,38b,38cが回動して、予備苗載せ台38a,38b,38cを図1に示す上下三段の積層状態と予備苗載せ台38a,38b,38cをほぼ同一平面上に展開させる展開状態に切り替え可能となる。該予備苗載せ台38a,38b,38cが回動して展開状態と積層状態とに切替操作手段として切替スイッチ73(ボタン、レバーでもよい)(図1,図2)を座席31近傍に設ける。
【0040】
また、本実施例の6条植の植付クラッチ全体として、HST(走行)レバー68にボタンを設けている。苗植付装置52は、図6(a)の左側側面図と図6(b)の背面図に示すように、HST(走行)レバー68のグリップ部に設けた植付操作ボタン69を操作すると植付クラッチ(図示省略)が「入」となり、6条全ての植付装置52が作動する構成としている。なお、もう一度植付操作ボタン69を操作すると植付クラッチが「切」となり、6条全ての植付装置52が停止する。なお、HST(走行)レバー68には植付部昇降レバー71と、押すごとに植付部が所定量下降するボタン72を設けている。
【0041】
また畦際クラッチレバー17を操作すると、植付クラッチ機構のうち所定条の植付装置52への駆動力を入切する畦際クラッチ(図示省略)が「切」作動してそれぞれ対応する条の植付装置52の入切が行われる。
【0042】
さらに、畦際クラッチレバー17を切操作すると、畦際スイッチ66が連動して「入」になり、植付装置52の通常の全植付位置の外側端部の仮想線P1(図4)よりも畦際クラッチレバー7の「切」位置にある最畦際寄りの第2植付仮想線P2(図5)を表示する制御のための構成を制御装置100に設けているので、機体(走行車体)2が畦に接触しないように表示装置(ディスプレイ)16を監視しながら作業が行える。
【0043】
また、図3に示す本実施例で使用する制御装置100のブロック図を示す。
制御装置100には図4の左右隣接する植付装置52,52同士の第3の間隔S3(一つの植付装置52の一対の植付爪52a,52a同士の間隔と同じ)が設定されている。なお、本件の画像処理用のデータ算出のための間隔S3は、出荷時に制御装置100に入力されている。
【0044】
なお、左右端部の植付爪52aから苗タンク51の端部までの第1間隔S1と左右端部の植付爪52aから展開状態とした前板ガード64迄の第2間隔S2も制御装置100に予め入力されている。第1畦際仮想線L1は、前板ガード64を使わない場合に用いる線であり、左右どちらか一側端部の植付爪52aと苗タンク51の端部との第1間隔S1から第1畦際仮想線L1を算出し、前板ガード64を機体側方に回動させて使用状態としたときは、植付爪52aと前板ガード64との第2間隔S2から第2畦際仮想線L2を算出する。
【0045】
また、苗載せ台(苗タンク)51の要部と機体後方の画像情報を検出する後部検出用のCCDカメラ48を苗タンク51に取り付け、該CCDカメラ48が検出した情報は制御装置に入力され、操縦部33に配置されたディスプレイ16(図3にのみ図示)に表示される。
【0046】
図4に6条植用の苗タンク51の要部平面図を示す。CCDカメラ48は苗タンク51の両側に機体後方を撮影することができる。
制御装置100は前記CCDカメラ48が検出した情報から苗の植付条列や畦際を判断することができる。
図4と図5は圃場の畦際で苗植付作業中の苗移植機1の苗タンク51の後端部と圃場を示す平面図である。
【0047】
なお、前記苗タンク51の左右両側で且つ後側下部に設ける回動支点を中心に、正面又は背面視でL字型の前板ガード64を回動自在に設ける。そして、該前板ガード64の基部には前板ガード64が機体外側に回動された使用状態であるか、機体内側(苗タンク51寄り)に回動された収納状態であるかを判別するガード検知センサ64aを設け、前記前板ガード64を収納状態としたときは、左側又は右側の最端部に配置する苗植付装置52と苗タンク51との第1間隔S1を用いて予測される旋回後の畦際位置を制御装置100に算出させ、その結果を第1畦際仮想線L1としてディスプレイ16の該当位置に表示する。
【0048】
そして、前記前板ガード64を使用状態としたときは、左側又は右側の最端部に配置する苗植付装置52と前板ガード64との第2間隔S2を用いて予測される旋回後の畦際位置を制御装置100に算出させ、その結果を第2畦際仮想線L2としてディスプレイ16の該当位置に表示する。
【0049】
また、図5に示す畦際での枕地一工程分Dの植え付け時に機体旋回後に苗載せ台(苗タンク)51の畦際に最も遠い側の苗植付装置52の苗植付爪が圃場に差し込む植付苗の植付ラインを第1植付仮想線P1と呼び、図5に示す一部の畦クラッチを切りとして苗植付作業を行い、6条植の枕地一工程分のスペースDを残して、機体旋回後に苗載せ台(苗タンク)51の畦際に最も遠い側の苗植付装置52の苗植付爪が圃場に差し込む植付苗の植付ラインを第2植付仮想線P2と呼ぶことにする。
【0050】
そして、前記制御装置100は、操縦部33の表示装置(ディスプレイ)16に前記第1植付仮想線P1等及び圃場と畦際の境界線を示す第1畦際仮想線L1等を出力する制御構成を備えている。このとき左右端部の苗植付爪52aから苗タンク51の端部までの第1の間隔S1、左右端部の苗植付爪52aから展開状態の前板ガード64の端部までの第2の間隔S2及び苗植付爪52a同士の左右間隔である第3の間隔S3が入力されていれば、制御装置100により表示装置16(ディスプレイ)に前記第1植付仮想線P1等及び圃場と畦際の境界線を示す第1畦際仮想線L1等と共に間隔S1,S2及びS3に関係した部材、装置の位置関係を表示できる制御構成を備えている。
【0051】
苗タンク51及び走行車体2の後部の情報を後部検出用のCCDカメラ48で検出し、検出した情報を表示装置16に表示することにより、操縦者は走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができるので、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
【0052】
また、苗切れのまま作業を継続し、苗が植え付けられない区間が生じることを防止できるので、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。
さらに、検出した情報に基づいて制御装置100が次の植付位置を示す第1植付仮想線P1を表示装置16に出力することにより、この仮想線P1に苗タンク51の端部を合わせて走行すれば前の作業位置と並ぶ位置に苗を植え付けることができるので、圃場全体の苗の植付精度が向上し、苗の生育が良好になると共に、収穫作業が容易になる。
【0053】
また、圃場と畦際の境界を第1畦際仮想線L1で示すことにより、苗タンク51を畦際に当てることなく作業を行うことができるので、苗タンク51の破損が防止されると共に、走行車体2が畦際に寄り過ぎることが防止され、苗の植付精度が向上する。
【0054】
また、苗タンク51の下部で且つ左右両側に前板ガード(防護体)64を回動自在に装着し、制御装置100には、左右外側端部の植付装置52から機体外側方向に回動させた前板ガード64までの距離(事前に制御装置100に入力)に基づき、第2畦際仮想線L2を表示装置16に表示させる制御構成を設けている。
【0055】
従って、左右外側端部の植付装置52から前板ガード64までの第2の間隔S2を基準に第2畦際仮想線L2を表示することにより、作業者は第1畦際仮想線L1と第2畦際仮想線L2のうち可能な限り、畦際に接近可能な方を選んで作業をすることができるので、苗タンク51の破損が防止されると共に、畦際でも正常に直進することができ、苗の植付精度が向上する。
【0056】
さらに1つの畦際クラッチレバー17を操作することにより、決められた2つの苗植付装置52,52の入切を操作する畦際操作部材である畦際クラッチ(図示せず)と畦際クラッチレバー17の操作を検知する畦際スイッチ66(畦際クラッチレバー17を切方向に操作すると「入」になる。)を設けている。
【0057】
制御装置100には、前記畦際スイッチ66が「入」になると、植付装置52の通常の全植付位置の外側端部の仮想線P1(図4)よりも畦際スイッチ66が「切」位置にある図5に示す最畦際寄りに第2植付仮想線(P2)(畦際クラッチを切って作業する際に一番畦に近い2条分の植付位置を示す)を表示する制御構成を設けている。
【0058】
従って、畦際スイッチ66が「入」になると、植付装置52の通常の全植付位置の外側端部の仮想線P1よりも畦際スイッチ66が「切」位置にある最畦際寄りに第2植付仮想線P2を表示することにより、次に苗の植え付けを行う畦際の作業幅D(図5の枕地一工程分)を表示することができるので、畦際での植付作業能率が向上すると共に、走行車体(機体)2を畦に接触させて走行車体2が損傷することや隣接条の苗を踏み潰して苗を無駄にすることが防止される。
【0059】
また、走行車体(機体)2の両側に設けた圃場面に次の植付作業時に直進の目安となる線を形成する線引きマーカ75と走行車体2が旋回する毎に線引きマーカ75の作動方向を切り替えるマーカ切替装置67を設けており、制御装置100には、マーカ切替装置67が線引きマーカ75を線引き作動させた側の走行車体2の後部側方をCCDカメラ48が検出する制御構成を設けている。
【0060】
そのため線引きマーカ75が圃場面に線を形成できているかどうかを操縦部33から振り返ることなく確認することができるので、確認のために減速したり停車したりする必要が無く、作業能率が向上する。また、線引きマーカ75を線引き作動させた側の走行車体2の後部側方をCCDカメラ48が自動的に作動するので、作業者がCCDカメラ48の切替操作を行う必要がなくなるので、操作性が向上する。
【0061】
図7と図8に示すように、制御装置100には、線引きマーカ75が作動した側の圃場面をCCDカメラ48で検出し、隣接する2つの植付装置52の左右間隔S3に基づいて次の植付作業位置を示す第3植付仮想線P3(P3−1,P3−2,P3−3及びP3−4、以下単にP3と示すことがある)(全植付装置52の植付爪52aで苗の植付を行うとき、並びに畦際クラッチレバー17を1つまたは複数操作して、特定の植付装置52の植付爪52aが苗の植え付けを行う位置を示す仮想線のことを言う。)を表示装置16に表示させる制御構成を設けている。
【0062】
従って、次の作業位置を示す第3植付仮想線P3を表示装置16に表示することができ、現在の第1植付仮想線P1と第3植付仮想線P3を参考にして植付作業を行うことができるので、苗の植付精度が向上し、苗の生育が良好になる。
【0063】
また、第3植付仮想線P3を基準として、機体旋回後の位置合わせを行うことができるので、圃場に植え付けた苗同士の左右間隔が開き過ぎることを防止でき、圃場面積に対して適量の苗が植え付けられ、作物の収穫量が減ることが防止される。
また、圃場に植え付けた苗同士の左右間隔が狭まり過ぎることを防止できるので、風害や病害虫による被害を抑えられ、作物の収穫量が減ることが防止される。
このように苗同士の左右間隔が狭まり過ぎると、風通しが悪く、害虫が棲み付きやすくなると共に、病気が発生すると連鎖的に広がりやすくなり収穫量が悪化し、また、台風等による強風で倒れると連鎖的に他の稲を倒すため、コンバイン等を用いた収穫作業の手間が増大する。
【0064】
制御装置100には、線引きマーカ72を作動させた側の圃場をCCDカメラ48が検出し、この検出結果から表示装置16に第1畦際仮想線P1が表示されるとき、隣接する2つの植付装置52の左右間隔である第3の間隔S3(図4参照)に基づく第3畦際仮想線P3を所定数の畦際クラッチレバー17を次の植付作業位置に表示する制御構成を設けることができる。
【0065】
前記制御構成により、図7〜図9に示す複数の第3畦際仮想線P3−1,P3−2,P3−3及びP3−4のうち、どの線が第1畦際仮想線L1と同じ位置に表示されるかで、畦際クラッチをどこまで操作するかを次のように判断できる。
なお、P3−1は下記のとおり、第1植付仮想線P1と同一位置なので図示を省略する。
【0066】
(1)畦際に最も近い第3植付仮想線P3−1:全条分の植付装置を用いるため、旋回前は畦際クラッチをどれも操作しない。
なお、第3植付仮想線P3−1は、第1植付仮想線P1と同じ位置に出る。
(2)畦際から数えて2番目の第3植付仮想線P3−2:畦際クラッチを1つ操作する。なお、3条や4条植の作業機においては、畦際クラッチレバー17は2つ設けられるが、両方の畦際クラッチレバー17を操作すると植付クラッチを切った状態と同じ状態となるため、第3植付仮想線P3−3で示す制御は行われない。
また、第3植付仮想線P3−2は、第2植付仮想線P2と同じ位置に出る。
【0067】
(3)畦際から数えて3番目の第3植付仮想線P3−3:畦際クラッチを1つ操作する。なお、7条や8条植においては、畦際クラッチレバー17は4つ以上設けられ、10条植においては5本設けられる。このため、7,8条では畦際から数えて4番目の第3植付仮想線P3−3−1、10条では畦際から数えて5番目の第3植付仮想線P3−3−2となる。
(4)畦際から最も離れた第3植付仮想線P3−4:既に畦の傍にいるため、畦際クラッチをどれも操作しない。
【0068】
畦際周辺で植付作業をする際、どの畦際クラッチレバー17を操作すればよいかを操縦部33から移動することなく判断することができるので、畦際クラッチレバー17を操作するタイミングが早く、苗の植え付けが行われない区間が生じることが防止され、作業者が手作業で苗を植える作業が不要となり、作業者の労力が軽減される。
また、畦際クラッチレバー17を操作するタイミングが遅く、苗を植える必要がない区間に苗を植えることを防止できるので、同じ箇所に重複して苗を植えることがなく、無駄な苗の発生が防止される。
【0069】
また機体(走行車体)2の進行方向及び走行速度を変更するHST(走行)レバー68を設けている場合、制御装置100には、HST(走行)レバー68を「前進」位置に操作するとCCDカメラ48が苗タンク51の後方及び線引きマーカ75の作動側を検出し、HST(走行)レバー68を「後進」にするとCCDカメラ48が苗タンク51の下部及び植付装置52を検出し、苗タンク51の下部及び植付装置52の位置から、苗タンク51を下降させたときに植付装置52が苗を植える第4植付仮想線(P4)(図10)を表示装置16に表示する制御構成を設けている。
【0070】
該第4植付仮想線P4は、制御装置100に予め記録されている、上リンク40及び下リンク41,41の前後長さに基づく苗植付部4を下降させたときに後端部が位置する場所であり、HST(走行)レバー68を「後進」に操作すると苗植付部4の後端下部付近と共に表示装置16に表示する仮想線である。この第4植付仮想線P4は、機体の後進に合わせて表示位置が逐次変更されるものとし、この線を表示装置16に投影されている圃場の畦際(この畦際は仮想線ではなく、表示装置16に写る映像を見て、作業者が判断する。)に合わせて下降させると、苗植付部4の後端下部が畦際に接触せず、且つ畦際との間隔が殆ど生じない位置に接地する。
【0071】
上記構成により機体(走行車体)2の進行方向に合わせてCCDカメラ48の検出範囲を変更することにより、進行方向に合わせた情報を検出することができるので、苗の植付方向を正確に把握できると共に、植付装置52で苗を押し倒すことが防止でき、苗の植付精度が向上する。
【0072】
後進時に第4植付仮想線P4を表示することにより、苗タンク51を下降させる際に下方に苗があるかどうかを操縦部33から振り返ることなく把握することができるので、作業能率が向上すると共に、同じ位置に苗を重複して植え付けたり、苗を押し潰したりすることが防止されるため、無駄になる苗が減少する。
また、畦際に苗植付部4を間隔を殆ど空けることなく接近させることができるので、畦際近くまで苗を植え付けることができ、作業者が圃場の空いた部分に手作業で苗を植え付ける作業が不要となり、作業者の労力が軽減される。
【産業上の利用可能性】
【0073】
本発明の苗移植機は、田植機に限らず、野菜苗などのその他の苗を植え付ける苗移植機として利用可能性がある。
【符号の説明】
【0074】
1 施肥装置付き乗用型田植機 2 走行車体
3 昇降リンク装置 4 苗植付部
5 粉粒体繰出し装置(施肥装置) 10 前輪
11 後輪 12 ミッションケース
13 前輪ファイナルケース 15 メインフレーム
16 表示装置(ディスプレイ) 17 畦際操作レバー
18 後輪ギヤケース 20 エンジン
21 ベルト伝動装置 23 油圧無段変速装置(HST)
25 植付クラッチケース 26 植付伝動軸
27(27a,27b) ロータ 28 施肥伝動機構
30 エンジンカバー 31 座席
32 フロントカバー 33 操縦部
34 ハンドル 35 フロアステップ
36 リヤステップ
38a,38b,38c 第1〜第3予備苗載せ台
39a,39b,39c 第1〜第3移動リンク部材
40 上リンク 41 下リンク
42 リンクベースフレーム 43 縦リンク
44 連結軸 46 昇降油圧式シリンダ
48 後部検出部材(CCDカメラ) 49 支持機枠
50 伝動ケース 51 苗載せ台
51a 苗取出口 51b 苗送りベルト
52 苗植付装置 52a 植付爪
53 ブロア用電動モータ 55 センターフロート
56 サイドフロート 58 ブロア
59 エアチャンバ 60 肥料ホッパ
61 繰出部 62 施肥ホース
64 前板ガード(防護体) 64a ガード検知センサ
65 支持枠体 65a 支持ローラ
65b 両側辺部材 66 畦際スイッチ
67 マーカ切替装置 68 HST(走行)レバー
69 植付操作ボタン 70 予備苗載せ台切替駆動装置
71 植付部昇降レバー 72 定量下降ボタン
73 切替スイッチ 75 線引きマーカ
76 作溝体 100 制御装置
【特許請求の範囲】
【請求項1】
圃場を走行する走行車体(2)と走行車体の操縦を行う操縦部(33)と苗を積載する複数条の苗タンク(51)と各苗タンク(51)から苗を取って圃場に植え付ける複数条の植付装置(52)を設けた苗移植機において、
苗タンク(51)に、苗タンク(51)及び走行車体(2)後方の情報を検出する後部検出装置(48)と後部検出装置(48)が検出した情報を表示する表示装置(16)を操縦部(33)に配置し、
後部検出装置(48)が検出した情報から苗の植付条列や畦際を判断する制御装置(100)と、
制御装置(100)には、表示装置(16)に次の植付作業位置を示す第1植付仮想線(P1)及び圃場と畦際の境界線を示す第1畦際仮想線(L1)を出力する制御構成を設けたことを特徴とする苗移植機。
【請求項2】
苗タンク(51)の下部で且つ左右両側に防護体(64)を回動自在に装着し、
制御装置(100)には、左右外側端部の植付装置(52)から機体外側方向に回動させた防護体(64)までの距離に基づき、第2畦際仮想線(L2)を表示装置(16)に表示させる制御構成を設けたことを特徴とする苗移植機。
【請求項3】
特定の植付装置(52)の入切を操作する畦際操作部材と、
畦際操作部材の操作を検知する操作検知部材と、
制御装置(100)には、操作検知部材が「入」になると、植付装置(52)の通常の全植付位置の外側端部の仮想線(P1)よりも操作検知部材が「切」位置にある最畦際寄りに第2植付仮想線(P2)を表示する制御構成を設けたことを特徴とする苗移植機。
【請求項4】
走行車体(2)の両側に設けた圃場面に次の植付作業時に直進の目安となる線を形成する線引きマーカ(75)と、
走行車体(2)が旋回する毎に線引きマーカ(75)の作動方向を切り替えるマーカ切替装置(67)と、
制御装置(100)には、マーカ切替装置(67)が線引きマーカ(75)を線引き作動させた側の走行車体(2)の後部側方を後部検出装置(48)が検出する制御構成を設けたことを特徴とする苗移植機。
【請求項5】
制御装置(100)には、線引きマーカ(75)が作動した側の圃場面を後部検出装置(48)で検出し、植付装置(52)同士の左右距離に基づいて次の植付作業位置を示す第3植付仮想線(P3)を表示装置(16)に表示させる制御構成を設けたことを特徴とする苗移植機。
【請求項6】
制御装置(100)には、線引きマーカ(75)を作動させた側の圃場を後部検出装置(48)が検出し、この検出結果から表示装置(16)に第1畦際仮想線(P1)が表示されるとき、所定数の植付装置(52)同士の左右距離に基づく第3畦際仮想線(P3)を次の植付作業位置に表示する制御構成を設けたことを特徴とする苗移植機。
【請求項7】
走行車体(2)の進行方向及び走行速度を変更する走行操作レバー(68)を設け、
制御装置(100)には、走行操作レバー(68)を「前進」位置に操作すると後部検出装置(48)が苗タンク(51)の後方及び線引きマーカ(75)の作動側を検出し、走行操作レバー(68)を「後進」にすると後部検出装置(48)が苗タンク(51)の下部及び植付装置(52)を検出し、
苗タンク(51)の下部及び植付装置(52)の位置から、苗タンク(51)を下降させたときに植付装置(52)が苗を植える第4植付仮想線(P4)を表示装置(16)に表示する制御構成を設けたことを特徴とする苗移植機。
【請求項1】
圃場を走行する走行車体(2)と走行車体の操縦を行う操縦部(33)と苗を積載する複数条の苗タンク(51)と各苗タンク(51)から苗を取って圃場に植え付ける複数条の植付装置(52)を設けた苗移植機において、
苗タンク(51)に、苗タンク(51)及び走行車体(2)後方の情報を検出する後部検出装置(48)と後部検出装置(48)が検出した情報を表示する表示装置(16)を操縦部(33)に配置し、
後部検出装置(48)が検出した情報から苗の植付条列や畦際を判断する制御装置(100)と、
制御装置(100)には、表示装置(16)に次の植付作業位置を示す第1植付仮想線(P1)及び圃場と畦際の境界線を示す第1畦際仮想線(L1)を出力する制御構成を設けたことを特徴とする苗移植機。
【請求項2】
苗タンク(51)の下部で且つ左右両側に防護体(64)を回動自在に装着し、
制御装置(100)には、左右外側端部の植付装置(52)から機体外側方向に回動させた防護体(64)までの距離に基づき、第2畦際仮想線(L2)を表示装置(16)に表示させる制御構成を設けたことを特徴とする苗移植機。
【請求項3】
特定の植付装置(52)の入切を操作する畦際操作部材と、
畦際操作部材の操作を検知する操作検知部材と、
制御装置(100)には、操作検知部材が「入」になると、植付装置(52)の通常の全植付位置の外側端部の仮想線(P1)よりも操作検知部材が「切」位置にある最畦際寄りに第2植付仮想線(P2)を表示する制御構成を設けたことを特徴とする苗移植機。
【請求項4】
走行車体(2)の両側に設けた圃場面に次の植付作業時に直進の目安となる線を形成する線引きマーカ(75)と、
走行車体(2)が旋回する毎に線引きマーカ(75)の作動方向を切り替えるマーカ切替装置(67)と、
制御装置(100)には、マーカ切替装置(67)が線引きマーカ(75)を線引き作動させた側の走行車体(2)の後部側方を後部検出装置(48)が検出する制御構成を設けたことを特徴とする苗移植機。
【請求項5】
制御装置(100)には、線引きマーカ(75)が作動した側の圃場面を後部検出装置(48)で検出し、植付装置(52)同士の左右距離に基づいて次の植付作業位置を示す第3植付仮想線(P3)を表示装置(16)に表示させる制御構成を設けたことを特徴とする苗移植機。
【請求項6】
制御装置(100)には、線引きマーカ(75)を作動させた側の圃場を後部検出装置(48)が検出し、この検出結果から表示装置(16)に第1畦際仮想線(P1)が表示されるとき、所定数の植付装置(52)同士の左右距離に基づく第3畦際仮想線(P3)を次の植付作業位置に表示する制御構成を設けたことを特徴とする苗移植機。
【請求項7】
走行車体(2)の進行方向及び走行速度を変更する走行操作レバー(68)を設け、
制御装置(100)には、走行操作レバー(68)を「前進」位置に操作すると後部検出装置(48)が苗タンク(51)の後方及び線引きマーカ(75)の作動側を検出し、走行操作レバー(68)を「後進」にすると後部検出装置(48)が苗タンク(51)の下部及び植付装置(52)を検出し、
苗タンク(51)の下部及び植付装置(52)の位置から、苗タンク(51)を下降させたときに植付装置(52)が苗を植える第4植付仮想線(P4)を表示装置(16)に表示する制御構成を設けたことを特徴とする苗移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−110977(P2013−110977A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257622(P2011−257622)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]