
苗移植機
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圃場に水稲等の作物の苗を植え付ける苗移植機に関するものである。
【背景技術】
【0002】
苗移植機で圃場を往復しながら植付作業を行う時、走行車体が圃場の端に達した際に旋回を行うが、従来の苗移植機では、旋回走行時に、植え付けた苗を倒すことを防止可能な構成としている。例えば、特許文献1に記載された走行車両や、特許文献2に記載された苗植機では、旋回の開始時及び終了時には、作業者がレバーを操作して植付部を昇降させることにより、植え付けた苗を倒すことを防ぎつつ旋回することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−195232号公報
【特許文献2】特開2009−232841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、レバーを操作して植付部を昇降させる場合、旋回時の操作が煩雑になるため、作業能率や操作性が低下し易くなる。このため、作業能率の低下を抑えつつ、旋回走行を行う手法として、ハンドルの操作に連動して植付部を自動的に昇降させる手法が考えられる。この手法を実現する構成としては、ハンドルの操作に連動して回動するステアリングアームと、植付部の昇降シリンダを作動させる作動アームとを連結し、ハンドル操作時には、作動アームをステアリングアームの回動に連動させることにより、植付部を昇降させることが挙げられる。
【0005】
しかし、このようにステアリングアームと作動アームとを直接連結した場合には、ハンドルの操作量が大きくなって、ステアリングアームと作動アームの作動量が大きくなった際に、メカロックが発生してハンドルが戻らなくなることが考えられる。また、このメカロックを考慮して、ハンドルの操作量が大きくなってから作動アームが作動するように調節した場合、ハンドルを大きく切らないと植付部が昇降しないため、旋回開始時に植付部を上昇させるタイミングが遅くなり、植付部が圃場に植え付けられた苗に接触して押し倒してしまう虞がある。この場合、倒れた苗を見つけ出して植え直す作業が必要となるため、作業者の労力が増加することにつながることが考えられる。
【0006】
本発明は、上記に鑑みてなされたものであって、メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決すると共に、目的を達成すべく、本発明に係る苗移植機は、走行車体(2)に設けられて前記走行車体(2)を操舵する操舵部材(31)と、前記走行車体(2)の後部に配設されると共に、苗を圃場に植え付ける苗植付部(40)と、前記苗植付部(40)の下部に位置し、前記苗植付部(40)に載置した苗を前記圃場に植え付ける植付装置(41)と、前記苗植付部(40)を上昇させる苗植付部上昇機構(50)と、前記操舵部材(31)を操舵することにより回動する旋回連動アーム(60)と、前記旋回連動アーム(60)の回動に連動し、前記苗植付部上昇機構(50)を作動させることができる作動アーム(70)と、伸縮性を有して前記旋回連動アーム(60)と前記作動アーム(70)とを連結することにより、双方の距離が変化可能な状態で前記旋回連動アーム(60)の回動を前記作動アーム(70)に伝達する伸縮部材(75)とを備えることを特徴とする。
【0008】
また、請求項2記載の発明は、請求項1に記載の苗移植機において、前記苗植付部(40)の動作状態を、少なくとも前記苗植付部上昇機構(50)による上昇状態を含んで切り替えることができる植付昇降レバー(36)と、前記植付昇降レバー(36)と連動して回動することにより、前記苗植付部(40)の動作状態を切り替え可能な切替カム(80)と、前記作動アーム(70)の作動に連動して前記切替カム(80)を前記苗植付部(40)の上昇状態に回動させる上昇アーム(90)と、前記上昇アーム(90)と前記作動アーム(70)とを連結して前記作動アーム(70)の動作を前記上昇アーム(90)に伝達するアーム連繋部材(77)とを備えることを特徴とする。
【0009】
また、請求項3記載の発明は、請求項1または2に記載の苗移植機において、前記伸縮部材(75)は、前記走行車体(2)が有する前側フレーム(8)の後方側で前記旋回連動アーム(60)と前記作動アーム(70)とを連結することを特徴とする。
【0010】
また、請求項4記載の発明は、請求項1から3のいずれか1項に記載の苗移植機において、前記旋回連動アーム(60)には、前記旋回連動アーム(60)の回動支点よりも前側に前記伸縮部材(75)を取り付ける取付部材(66)が設けられており、前記取付部材(66)は、前記操舵部材(31)が直進位置にあるときに、前記走行車体(2)における機体左右方向の中央部に位置することを特徴とする。
【0011】
また、請求項5記載の発明は、請求項1から4のいずれか1項に記載の苗移植機において、前記操舵部材(31)の操舵を検知する操舵検知部材(170)と、前記走行車体(2)の走行速度及び進行方向を検出する走行検出手段(171)と、前記植付装置(41)が停止した状態であり、且つ、前記操舵検知部材(170)が前記操舵部材(31)の操舵を検知すると共に、前記走行検出手段(171)が前記走行車体(2)の後進を検出した場合には、前記植付装置(41)が前記圃場の土中に入り込んだ状態で停止しているとみなして作業者に報知する報知手段(172)とを備えることを特徴とする。
【0012】
また、請求項6記載の発明は、請求項1から5のいずれか1項に記載の苗移植機において、所定数の前記植付装置(41)への駆動力の伝達と遮断とを切り替える部分条クラッチ(140)と、前記部分条クラッチ(140)を操作する部分条クラッチレバー(141)と、前記苗植付部(40)の上昇を検知する上昇検知手段(142)と、前記上昇検知手段(142)が前記苗植付部(40)の上昇を検知すると作動する駆動モータ(145)と、前記駆動モータ(145)の出力軸に連結される切替アーム(146)と、前記切替アーム(146)と前記部分条クラッチレバー(141)とを連結すると共に、前記駆動モータ(145)の作動時には前記部分条クラッチ(140)が前記駆動力を伝達する方向に、前記駆動モータ(145)の作動時の出力を前記切替アーム(146)を介して前記部分条クラッチレバー(141)に伝達するクラッチレバー連繋手段(147)とを備えることを特徴とする。
【発明の効果】
【0013】
請求項1記載の苗移植機は、伸縮部材で旋回連動アームと作動アームを連結し、旋回連動アームと作動アームの距離を変化可能に構成したことにより、伸縮部材の張力により旋回連動アームの回動量以上に作動アームを回動させることができるので、旋回時の植付部上昇が早くなり、苗の押し倒しが防止される。また、操舵部材を大きく操作した際に伸縮部材が伸びることにより、旋回連動アームと作動アームがメカロックして動かなくなることを防止できるので、作業の中断が無く、作業能率が向上する。
【0014】
請求項2記載の苗移植機は、請求項1の発明の効果に加えて、切替カムを苗植付部の上昇状態に回動させる上昇アームと、旋回連動アームの回動に連動して苗植付部上昇機構を作動させる作動アームをアーム連結部材で連結したことにより、操舵部材を操作して走行車体を旋回させる際に苗植付部上昇機構を作動させることができるので、操縦者は旋回の際に苗植付部の上昇操作を行なう必要が無く、旋回操作に集中でき、旋回時の操作性が向上する。
【0015】
請求項3記載の苗移植機は、請求項1または2の発明の効果に加えて、前側フレームの後方側で旋回連動アームと作動アームを連結したことにより、圃場の泥土が旋回連動アームや作動アームに付着しにくくなり、泥土により動作がロックされることが防止される。
また、付着した泥土を取り除く作業が不要となり、メンテナンス性が向上する。
【0016】
請求項4記載の苗移植機は、請求項1から3のいずれかの発明の効果に加えて、取付部材を旋回連動アームの前側に配置したことにより、旋回連動アームの回動量が少なくても伸縮部材の伸びる量が増えるため、苗植付部の上昇タイミングが早くなるので、苗植付部が苗を押し倒すことが防止される。また、操舵部材が直進位置にあるとき、取付部材が機体左右方向の中央部に位置する構成としたことにより、左右どちらに旋回するときでも苗植付部の上昇タイミングを同じにすることができ、操作性が向上する。
【0017】
請求項5記載の苗移植機は、請求項1から4のいずれかの発明の効果に加えて、植付装置を停止させ、操舵検知部材が旋回操作を検知した状態で、且つ走行検出手段が後進を検知すると報知部材が作動する構成としたことにより、後進停止時に植付装置が土に潜り込む位置で停止することを報知することができるので、植付作業の再開前に植付装置に付着した泥土を除去すれば植付装置が確実に苗を取れる状態となるため、苗の植付精度が向上する。
【0018】
請求項6記載の苗移植機は、請求項1から5のいずれかの発明の効果に加えて、 苗植付部を上昇させると自動的に部分条クラッチが「入」側に操作されることにより、部分条クラッチを「切」にして作業をした次の工程で、部分条クラッチを「入」にし忘れることを防止できるので、苗が植え付けられない区間の発生が防止され、作業者が手作業で植え付ける作業が不要となる。また、駆動モータが部分条クラッチ「入」側にのみ作動するので、負荷が小さく、耐久性が向上する。
【図面の簡単な説明】
【0019】
【図1】図1は、実施形態に係る苗移植機の概略図である。
【図2】図2は、図1のA−A矢視図である。
【図3】図3は、ステアリングアームの平面図である。
【図4】図4は、図3のB−B矢視図である。
【図5】図5は、図3のB−B矢視図であり、スプリングカバーを設けた場合の説明図である。
【図6】図6は、切替カム付近を示す斜視図である。
【図7】図7は、切替カムの正面図である。
【図8】図8は、植付昇降レバーと切替カムとの関係を示す説明図である。
【図9】図9は、上昇検知センサの設置状態の説明図である。
【図10】図10は、畦クラッチレバーの説明図である。
【図11】図11は、植付深さ調整レバーの説明図である。
【図12】図12は、カム用モータによって切替カムを回動させる場合の説明図である。
【図13】図13は、カム用モータによって切替カムを回動させる場合の説明図である。
【図14】図14は、カム用モータによって切替カムを回動させる場合の説明図である。
【図15】図15は、変速レバーを後進に切り替える場合の説明図である。
【図16】図16は、報知装置の説明図である。
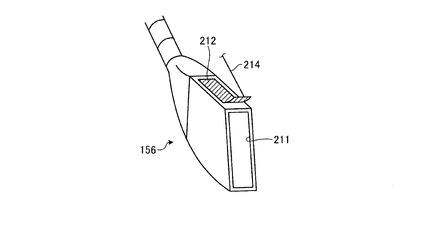
【図17】図17は、実施形態に係る苗移植機の変形例であり、作溝器の斜視図である。
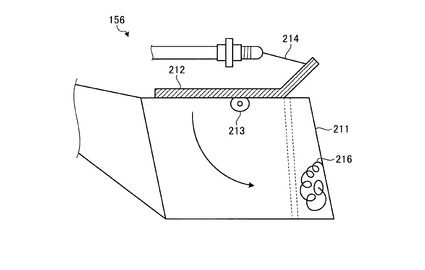
【図18】図18は、図17に示す作溝器の断面図である。
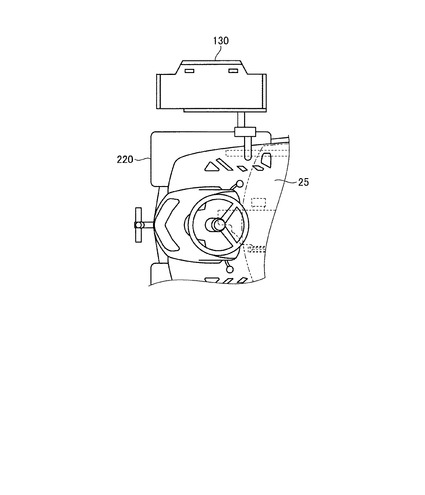
【図19】図19は、実施形態に係る苗移植機の変形例であり、苗補給時ステップの概略図である。
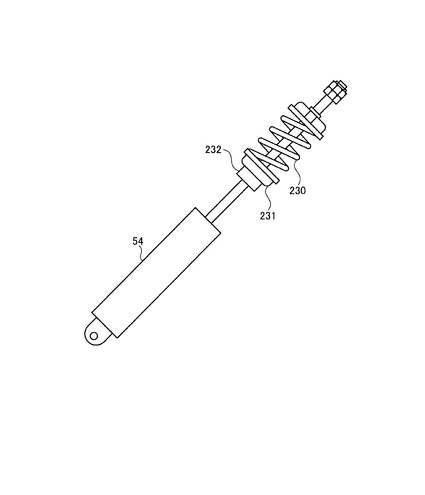
【図20】図20は、実施形態に係る苗移植機の変形例であり、油圧昇降シリンダの概略図である。
【発明を実施するための形態】
【0020】
以下に、本発明に係る苗移植機の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
【0021】
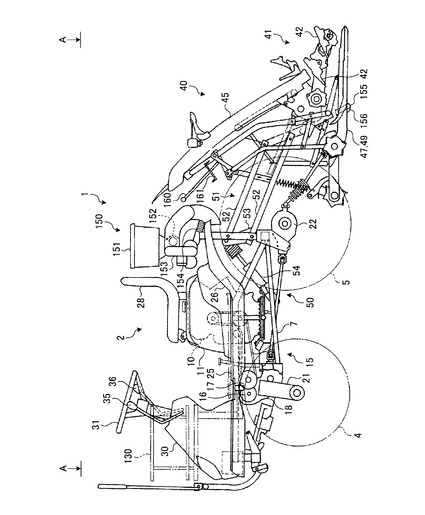
〔実施形態〕
図1は、実施形態に係る苗移植機の概略図である。図2は、図1のA−A矢視図である。なお、以下の説明においては、前後、左右の方向基準は、操縦席からみて、車体の走行方向を基準として、前後、左右の基準を規定している。同図に示す苗移植機1の走行車体2は、左右一対の前輪4と、同様に左右一対の後輪5とを有しており、走行時には各車輪が駆動する四輪駆動車としている。また、走行車体2の後部には、苗植付部上昇機構50によって昇降可能な苗植付部40が備えられている。
【0022】
この走行車体2は、車体の略中央に配置されたメインフレーム7と、このメインフレーム7の上に搭載されたエンジン10と、エンジン10の動力を駆動輪と苗植付部40とに伝える動力伝達装置15と、を備えている。つまり、本実施形態に係るこの苗移植機1では、エンジン10の動力が走行車体2を前進や後進にさせるために用いるのみでなく、苗植付部40を駆動させるためにも使用され、ディーゼル機関やガソリン機関等の熱機関が用いられる。
【0023】
また、エンジン10は、走行車体2の左右方向における略中央で、且つ、作業者が乗車時に足を載せるフロアステップ25よりも上方に突出させた状態で配置されている。また、フロアステップ25は、走行車体2の前部とエンジン10の後部との間に渡って設けられており、メインフレーム7上に取り付けられており、その一部を格子状になることにより、靴に付いた泥を圃場に落とせるようになっている。また、このフロアステップ25の後方には、後輪5のフェンダを兼ねたリアステップ26が設けられている。このリアステップ26は、後方に向うに従って上方に向う方向に傾斜した傾斜面を有しており、エンジン10の左右それぞれの側方に配置されている。
【0024】
エンジン10は、これらのフロアステップ25とリアステップ26とから上方に突出しており、これらのステップから突出している部分には、エンジン10を覆うエンジンカバー11が配設されている。即ち、エンジンカバー11は、フロアステップ25とリアステップ26とから上方に突出した状態で、エンジン10を覆っている。
【0025】
また、走行車体2には、エンジンカバー11の上部に操縦席28が設置されており、操縦席28の前方で、且つ、走行車体2の前部には、フロントカバー30が配設されている。このフロントカバー30は、フロアステップ25の床面から上方に突出した状態で配置されており、フロアステップ25の前部側を左右に分断している。
【0026】
このフロントカバー30の内部には、各種の操作装置やエンジン用燃料の燃料タンク等が配設されている。また、フロントカバー30の上部には、操作装置を作動させる操作レバー等や計器類、ハンドル31が配設されている。このハンドル31は、作業者が前輪4を操舵操作することにより走行車体2を操舵する操舵部材として設けられており、フロントカバー30内の操作装置等を介して前輪4を転舵させることが可能になっている。また、レバーとしては、走行車体2の走行状態を切り替える変速レバー35と、苗植付部40の動作状態を、少なくとも苗植付部上昇機構50による上昇状態を含んで切り替えることができる植付昇降レバー36と、が配設されている。具体的には、植付昇降レバー36は、苗植付部40の昇降状態を切り替えることが可能になっている。
【0027】
また、フロアステップ25におけるフロントカバー30の左右それぞれの側方に位置する部分には、補給用の苗を載せておく予備苗載台130が配置されている。この予備苗載台130は、フロアステップ25の床面から突出した支持軸(鉛直軸)によって回転自在に支持されており、作業者の手によって回動させることが可能になっている。
【0028】
また、動力伝達装置15は、主変速機としての油圧式無段変速機16と、この油圧式無段変速機16にエンジン10からの動力を伝えるベルト式動力伝達機構17と、を有している。このうち、油圧式無段変速機16とは、HST(Hydro Static Transmission)と云われる静油圧式の無段変速機として構成されている。このため、油圧式無段変速機16は、エンジン10からの動力で駆動する油圧ポンプによって油圧を発生させ、この油圧を油圧モータで機械的な力(回転力)に変換して出力する。
【0029】
この油圧式無段変速機16は、エンジン10よりも前方で、且つ、フロアステップ25の床面よりも下方に配置されており、本実施形態に係る苗移植機1では、走行車体2の上面から見て、エンジン10の前方に配置されている。
【0030】
また、ベルト式動力伝達機構17は、エンジン10の出力軸に取り付けたプーリと、油圧式無段変速機16の入力軸に取り付けたプーリと、双方のプーリに巻き掛けたベルトと、さらに、このベルトの張力を調整するテンションプーリと、を備えている。これにより、ベルト式動力伝達機構17は、エンジン10で発生した動力を、ベルトを介して油圧式無段変速機16に伝達可能になっている。
【0031】
さらに、動力伝達装置15は、エンジン10からの出力がベルト式動力伝達機構17と油圧式無段変速機16とを介して伝達されるミッションケース18を有している。このミッションケース18は、メインフレーム7の前部に取り付けられている。ミッションケース18は、ベルト式動力伝達機構17と油圧式無段変速機16とを介して伝達されたエンジン10からの出力を、当該ミッションケース18内の副変速機で変速して、前輪4と後輪5への走行用動力と、苗植付部40への駆動用動力とに分けて出力可能になっている。
【0032】
このうち、走行用動力は、一部が左右の前輪ファイナルケース21を介して前輪4に伝達可能になっており、残りが左右の後輪ギヤケース22を介して後輪5に伝達可能になっている。左右それぞれの前輪ファイナルケース21は、ミッションケース18の左右それぞれの側方に配設されており、左右の前輪4は、車軸を介して左右の前輪ファイナルケース21に連結されている。また、この前輪ファイナルケース21は、ハンドル31の操舵操作に応じて駆動し、前輪4を転舵させることが可能になっている。同様に、左右それぞれの後輪ギヤケース22には、車軸を介して後輪5が連結されている。一方、駆動用動力は、走行車体2の後部に設けた植付クラッチ(図示省略)に伝達され、この植付クラッチの係合時に植付伝動軸(図示省略)によって苗植付部40へ伝達される。
【0033】
また、走行車体2の後部に備えられる苗植付部40を昇降させる苗植付部上昇機構50は、昇降リンク装置51を有しており、苗植付部40は、この昇降リンク装置51を介して走行車体2に取り付けられている。この昇降リンク装置51は、走行車体2の後部と苗植付部40とを連結させる平行リンク機構52を備えている。この平行リンク機構52は、上リンクと下リンクとを有しており、これらのリンクが、メインフレーム7の後部端に立設した背面視門方のリンクベースフレーム53に回動自在に連結され、各リンクの他端側が苗植付部40に回転自在に連結されることにより、苗植付部40を昇降可能に走行車体2に連結している。
【0034】
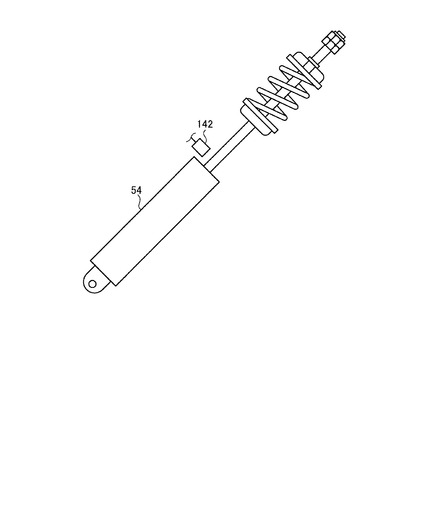
また、苗植付部上昇機構50は、油圧によって伸縮する油圧昇降シリンダ54を有しており、油圧昇降シリンダ54の伸縮動作によって、苗植付部40を昇降させることが可能になっている。苗植付部上昇機構50は、その昇降動作によって、苗植付部40を非作業位置まで上昇させたり、対地作業位置(対地植付位置)まで下降させたりすることが可能になっている。
【0035】
また、苗植付部40は、苗を植え付ける範囲を複数の区画、或いは複数の列で植え付けることができ、本実施形態に係る苗移植機1では、苗を4つの区画で植え付ける、いわゆる4条植の苗植付部40になっている。この苗植付部40は、植付装置41と、苗載せ部45及びフロート47を備えている。このうち、苗載せ部45は、走行車体2の左右方向において仕切られた植付条数分の苗載せ面46を有しており、それぞれの苗載せ面46に土付きのマット状苗が載置することが可能になっている。これにより、苗載せ部45に載置した苗が植え付けられて無くなるたびに、圃場外に用意している苗を取りに戻る必要が無く、連続した作業を行えるので、作業能率が向上する。
【0036】
また、植付装置41は、苗載せ部45に載置された苗を圃場に植え付ける装置になっている。この植付装置41は、2条毎に1つずつ配設されており、2条分の植付爪42を備えている。また、フロート47は、走行車体2の移動と共に、圃場面上を滑走して整地するものであり、走行車体2の左右方向における苗植付部40の中央に位置するセンターフロート48と、左右方向における苗植付部40の両側に位置するサイドフロート49と、を有している。
【0037】
また、走行車体2における操縦席28の後方には、施肥装置150が搭載されている。この施肥装置150は、肥料を貯蔵する肥料タンク151と、肥料タンク151内の肥料を一定量ずつ下方に繰り出す肥料繰出部152と、繰り出された肥料を施肥ホース154によって苗植付部40側に移送するブロア153と、を有している。さらに、施肥装置150は、苗植付部40の下方に配設されると共に、施肥ホース154によって肥料が移送される施肥ガイド155と、施肥ガイド155の前側に設けられると共に、施肥ホース154によって移送された肥料を、苗植付条の側部近傍に形成される施肥溝内に落とし込む作溝器156と、を有している。
【0038】
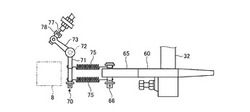
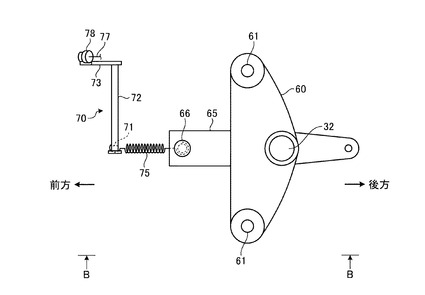
図3は、ステアリングアームの平面図である。図4は、図3のB−B矢視図である。走行車体2には、ハンドル31の操舵を受けて前輪4を回動させるステアリングアーム60が、走行車体2の前方底部側に配設されている。即ち、ステアリングアーム60は、当該ステアリングアーム60に連結される操舵シャフト32が、ハンドル31の回転時に回転トルクが、ピニオン機構、またはパワステ機構を介して伝達されることにより回動し、この操舵シャフト32の回動に伴ってステアリングアーム60も回動する。このように、ハンドル31の操舵時は、ステアリングアーム60は、操舵シャフト32を回動支点として回動し、また、ステアリングアーム60は、ハンドル31を操舵することにより回動する旋回連動アームとなっている。
【0039】
このステアリングアーム60の左右方向における両端には、それぞれタイロッド(図示省略)が連結されるタイロッド連結部61が形成されている。このタイロッド連結部61に連結される2本のタイロッドは、左右の前輪ファイナルケース21に取り付けられているナックルアーム(図示省略)に連結されており、ステアリングアーム60の動きをナックルアームに伝達可能になっている。これらにより、ハンドル31を操舵することにより、左右の前輪4の操舵が可能になっている。
【0040】
また、ステアリングアーム60は、左右方向における中央付近に、前方に延在する回動伝達部65を有しており、回動伝達部65の先端、即ち、回動伝達部65における操舵シャフト32が位置する側の反対側の端部付近に、取付ピン66が配設されている。この取付ピン66は、ハンドル31が直進位置にあるときに、走行車体2における機体左右方向の中央部に位置している。
【0041】
上記の構成により、ステアリングアーム60を左右どちらに回動させても回動量が略同じになるので、作業者は旋回操作方向が左右どちらでも同じ操作を行えばよいので、操作性が向上する。また、後述の連結スプリング75の張力により、オートリフト作動アーム70の回動量をステアリングアーム60の回動量よりも多くする作用を、左右方向のどちらにも均等に働かせることができるので、左右方向どちらの旋回時でも苗植付部40の上昇タイミングを速くすることができるので、苗植付部40が苗を押し倒すことが防止される。
【0042】
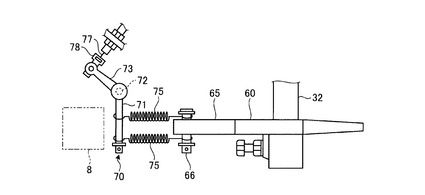
また、このステアリングアーム60の前方には、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができる作動アームであるオートリフト作動アーム70が配設されている。オートリフト作動アーム70は、ステアリングアーム60の取付ピン66に対して、連結スプリング75によって連結されている。この連結スプリング75は、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態で、ステアリングアーム60の回動をオートリフト作動アーム70に伝達する伸縮部材として用いられている。さらに、連結スプリング75は、2本が用いられており、2本の連結スプリング75は、ステアリングアーム60が有する上面側と下面側とで、取付ピン66とオートリフト作動アーム70とを連結している。
【0043】
また、このように、取付ピン66は、連結スプリング75を取り付ける取付部材としてステアリングアーム60に設けられており、ステアリングアーム60の回動支点よりも前側に配設されている。また、オートリフト作動アーム70における連結スプリング75との連結部分は、走行車体2が有する前側フレームであるフロントフレーム8の後方側に位置している。このため、連結スプリング75は、フロントフレーム8の後方側で、ステアリングアーム60とオートリフト作動アーム70とを連結している。
【0044】
上記の構成により、フロントフレーム8がステアリングアーム60とオートリフト作動アーム70、及び連結スプリング75の防護壁となるので、圃場の泥土や水が跳ね上がった際にステアリングアーム60とオートリフト作動アーム70、及び連結スプリング75に泥土や水が付着することが防止され、付着した泥土や水を除去する作業に要する時間が減少するため、メンテナンス性が向上すると共に、作業者の労力が軽減される。また、除去されなかった泥土や水により、ステアリングアーム60とオートリフト作動アーム70、及び連結スプリング75が劣化することを防止できるので、耐久性が向上すると共に、旋回操作時の挙動が変化することがなく、操作性が維持される。
【0045】
また、オートリフト作動アーム70は、上方に向うスプリング側連結部71と、一端がスプリング側連結部71に連結されて水平に横に伸びる軸である回動軸72と、回動軸72における他端側に連結されると共に、連結部分から上方に延びるケーブル側連結部73と、を有している。さらに、ケーブル側連結部73の上端部分には、アーム用ケーブル77が、連結部材78によって回動自在に接続されている。このように構成されるオートリフト作動アーム70は、回動軸72を中心として一体となって回動可能になっており、これにより、スプリング側連結部71とケーブル側連結部73とは、回動軸72を中心とする方向に回動する。
【0046】
連結スプリング75は、このうちスプリング側連結部71に連結しており、ステアリングアーム60とスプリング側連結部71との距離を変化させることができる状態で、双方を連結している。なお、このようにステアリングアーム60とオートリフト作動アーム70とを連結する連結スプリング75は、ハンドル31が直進位置にあるときには、自由長になるように、相対的な位置関係、及び連結スプリング75の特性が設定されている。
【0047】
上記の構成により、連結スプリング75の張力を利用してオートリフト作動アーム70の回動量をステアリングアーム60の回動量よりも多くすることができるので、旋回時に苗植付部40が上昇を開始するタイミングが速くなるため、苗植付部40が圃場に植え付けた苗を押し倒すことが防止され、苗の損傷が防止されて生育が安定する。また、連結スプリング75を上下方向に2本設けたことにより、ハンドル31を操作した際のオートリフト作動アーム70の回動量をステアリングアーム60の回動量よりもいっそう多くすることができるので、ハンドル31の操作角度が小さい段階で苗植付部40が上昇するため、苗植付部40が圃場に植え付けた苗を押し倒すことが防止され、苗の損傷が防止されて生育が安定する。
【0048】
なお、図5で示す通り、連結スプリング75を上下方向に2本設けるときは、上側の連結スプリング75の外周を覆うスプリングカバー75aを設ける構成としてもよい。これにより、旋回操作時に伸張した上下の連結スプリング75,75が、旋回操作終了時に収縮する際に噛み合って十分に収縮しなくなることや、次の旋回操作時にハンドル31の操作量と合致しない伸張量になることを防止できるので、苗植付部40の上昇のタイミングが遅くなることが防止され、苗植付部40による苗の押し倒しが防止される。
【0049】
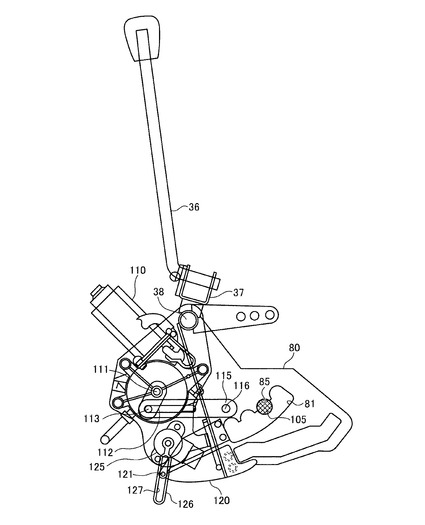
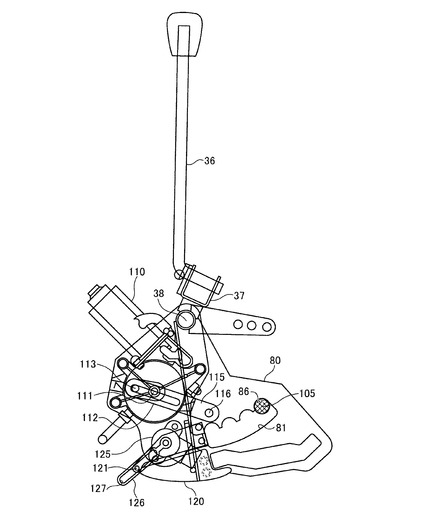
図6は、切替カム付近を示す斜視図である。図7は、切替カムの正面図である。オートリフト作動アーム70に接続されるアーム用ケーブル77の他端側は、ハンドル31の操舵に応じて苗植付部40を自動的に上昇させる機構であるオートリフト機構を構成するオートリフトアーム90に接続されている。即ち、アーム用ケーブル77は、オートリフトアーム90とオートリフト作動アーム70とを連結して、オートリフト作動アーム70の動作をオートリフトアーム90に伝達するアーム連繋部材として設けられている。オートリフト機構は、他に切替カム80、バックリフトアーム95、バックリフト入切レバー96、位置決めローラ105を有して構成されている。
【0050】
これらの各部材について説明すると、切替カム80は、板状の部材によって形成されており、中央付近に横長形状の孔である位置決め孔81が形成されており、この位置決め孔81の上側端縁には、上方に凸となる円弧状に形成される4つの位置決め部82が形成されている。即ち、位置決め孔81の上側端縁には、第1位置である上昇位置83と、第2位置である停止位置84と、第3位置である下降位置85と、第4位置である植付け位置86と、の4つの位置決め部82が形成されている。位置決めローラ105は、先端部分が、この位置決め孔81に挿入されている。また、位置決めローラ105には、スプリング(図示省略)によって上方の付勢力が常時付与されているため、位置決めローラ105は、4つの位置決め部82のいずれかに半分程度嵌められた状態になる。
【0051】
切替カム80における位置決めローラ105が挿入される側、即ち、位置決めローラ105が位置する側には、バックリフトアーム95が位置しており、さらに、バックリフトアーム95における切替カム80が位置する側の反対側には、バックリフト入切レバー96が位置している。オートリフト作動アーム70は、これらのうち、切替カム80とバックリフトアーム95との間に配設されている。
【0052】
オートリフト作動アーム70とバックリフトアーム95とは、一端が共通の支持軸100によって、回動自在に連結している。また、オートリフトアーム90における支持軸100に連結している側の端部の反対側の端部は、ケーブル接続部91が位置しており、アーム用ケーブル77は、このケーブル接続部91に接続されている。
【0053】
また、バックリフトアーム95には、オートリフトアーム90の方向に突出したロックピン101が設けられている。一方、オートリフトアーム90には、このロックピン101が入り込む孔(図示省略)があけられており、ロックピン101は、通常、このオートリフトアーム90の孔に入り込んでいる。さらに、バックリフトアーム95は、位置決めローラ105と連結している。このため、ロックピン101がオートリフトアーム90の孔に入り込んだ状態では、オートリフトアーム90とバックリフトアーム95と位置決めローラ105とは、一体で移動可能になっている。また、オートリフトアーム90は、支持軸100や位置決めローラ105の軸方向に移動可能になっており、このため、任意で、ロックピン101から外すことができる。
【0054】
上記の構成により、変速レバー35を後進操作した際に苗植付部40を自動上昇させるバックリフト、及びハンドル31を旋回操作した際に苗植付部40を自動上昇させるオートリフトを作動させない状態を選択することができるので、作業者は任意のタイミングで苗植付部40の上昇や下降等の操作を行える。この設定のときは、特に旋回時の操作が増えてしまい操作性は低下するが、苗植付部40を自動的に昇降させたのでは植付位置が合わせられない条件下では植付位置を揃えることができるので、苗の植付精度が向上する。また、ロックピン101からオートリフトアーム90を外すことにより、物理的にバックリフト及びオートリフトを作動させない構成となるので、電子制御のように制御装置の誤作動でバックリフトやオートリフトが作動してしまうことを防止できる。
【0055】
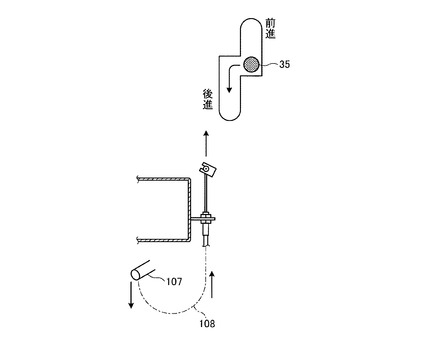
また、バックリフト入切レバー96は、位置決めローラ105に対して回動可能に連結されている。また、バックリフト入切レバー96には、縦長部分と横長部分とを有することにより、逆L字状に形成された切欠き孔97があけられている。この切欠き孔97には、支持軸100と同じ向きに延在するバー107の先端が挿入されている。このバー107は、後述するように、変速レバー35が後進に設定された際に、下降するように構成されている。
【0056】
このため、変速レバー35が後進に設定された際に、バー107が切欠き孔97の横長部分に位置している場合は、バー107が下方向に移動することにより、バックリフト入切レバー96はバー107に押されて下方に移動する。この場合、当該バックリフト入切レバー96と連結している位置決めローラ105も、下方に移動することとなる。これに対し、バー107が切欠き孔97の縦長部分に位置している場合は、バー107が下方向に移動しても、バー107は切欠き孔97内を移動するに留まる。このため、バー107からバックリフト入切レバー96に対して押し下げる力は働かないため、位置決めローラ105も下方には移動しない。
【0057】
さらに、バックリフト入切レバー96は、位置決めローラ105に対して回動可能に連結されているため、作業者がバックリフト入切レバー96を手で回動し、切欠き孔97に対するバー107の位置を適宜決めることにより、変速レバー35を後進にした際に、バックリフト入切レバー96と位置決めローラ105とを自動的に下方へ押し下げるモードと、押し下げないモードを、任意で選択できるようになっている。
【0058】
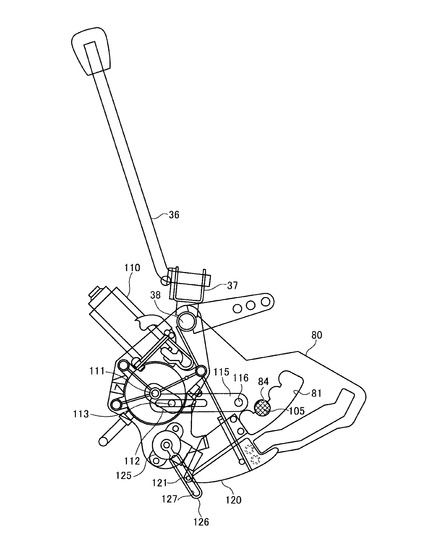
図8は、植付昇降レバーと切替カムとの関係を示す説明図である。植付昇降レバー36は、下端がブラケット37と連結軸38とを介して、切替カム80に連結されている。即ち、連結軸38が切替カム80の上端付近に形成された連結孔87に嵌り込むことにより、植付昇降レバー36と切替カム80とは連結している。これにより、切替カム80は、植付昇降レバー36の操作時は、連結軸38を中心として、植付昇降レバー36と共に回動する。また、切替カム80には、スプリング(図示省略)によって、オートリフトアーム90におけるケーブル接続部91側の方向(図6の矢印F方向)の付勢力が、常時付与されている。
【0059】
また、植付昇降レバー36は、苗植付部40の複数の作動状態を切り替えることができ、具体的には、「上昇」、「停止」、「下降」、「植え付け」の各モードを切替え設定できるようになっている。植付昇降レバー36を操作することにより設定するこれらのモードは、それぞれ切替カム80の上昇位置83、停止位置84、下降位置85、植付け位置86に対応している。
【0060】
即ち、位置決めローラ105は、通常、4つの位置決め部82のいずれかに嵌められた状態になるが、作業者が植付昇降レバー36を「上昇」の位置の設定した場合には、連結軸38を中心として植付昇降レバー36と共に回動する切替カム80は、植付け位置86の方向に回動する。これにより、位置決めローラ105は、位置決め孔81を相対的に移動し、位置決め部82の上昇位置83に収まる。同様に、植付昇降レバー36を「停止」の位置の設定した場合には、位置決めローラ105は、位置決め部82の停止位置84に収まり、植付昇降レバー36を「下降」の位置の設定した場合には、位置決めローラ105は、位置決め部82の下降位置85に収まり、植付昇降レバー36を「植え付け」の位置の設定した場合には、位置決めローラ105は、位置決め部82の植付け位置86に収まる。
【0061】
また、連結軸38を中心として回動する切替カム80は、ワイヤーやロッド、アーム等を介して、苗植付部上昇機構50の油圧昇降シリンダ54への油路を切り替える切替バルブ(図示省略)に連動している。このため、連結軸38を中心とする切替カム80の角度に応じて、苗植付部40の上昇、停止、下降、植え付けが、それぞれ制御される。即ち、切替カム80は、植付昇降レバー36と連動して回動することにより、苗植付部40の動作状態を切り替え可能になっている。
【0062】
また、切替カム80の近傍には、カム用モータ110が配設されている。このカム用モータ110は、走行車体2が圃場の端に達して旋回走行に移り、旋回に伴って後輪5が回転する際、その後輪5が所定数回転した時点で苗植付部40を自動的に下降させるための手段になっている。具体的には、カム用モータ110の駆動時に回動する作動軸111には、モータアーム112が固定されており、モータアーム112の先端にはモータ側ピン113が立設している。
【0063】
他方、切替カム80には、上昇位置83付近にピン孔88が形成されており、切替カム80にも、このピン孔88にカム側ピン116が嵌り込むことにより、カム側ピン116が立設されている。さらに、このカム側ピン116には、植え付けアーム115が連結しており、植え付けアーム115には、長孔が開設されている。この長孔には、モータ側ピン113が入り込み、摺動可能に嵌め合わされている。
【0064】
また、切替カム80の下方には、切替カム80の位置を検出するために、三角形状のプレート120が固定されており、プレート120の頂点には、プレートピン121が立設されている。また、プレート120の近傍で、且つ、カム用モータ110の下方には、ポテンショメータ125が配設されており、このポテンショメータ125は、長孔127が開設されたメータアーム126が、当該ポテンショメータ125の軸に固定されている。ポテンショメータ125は、メータアーム126の角度を検出可能になっており、メータアーム126の長孔127には、プレートピン121が摺動可能に嵌め合わされている。
【0065】
このため、切替カム80が回動した場合には、プレートピン121とポテンショメータ125との相対的な位置関係が変化するため、メータアーム126が回動し、ポテンショメータ125は、このメータアーム126の回動により、切替カム80の回動状態を検出できる。
【0066】
上記の構成により、ハンドル31を旋回終了方向に操作すると、カム用モータ110が作動して切替カム80を回動させて下降位置85に切り替えるので、苗植付部40を自動的に下降させることができる。さらにハンドル31を操作すると、カム用モータ110が作動して切替カム80を回動させて植付位置86に切り替えるので、苗植付部40が下降し切ると共に直進走行を開始した位置で、植付装置41による苗の植え付けを自動的に開始することができる。これにより、旋回終了時に苗植付部40の下降操作や植付装置41の作動操作を行う必要がなくなるため、操作性が向上すると共に、作業者は旋回操作に集中することができるので、植付開始位置を隣接条の植付終了位置に合わせやすくなるため、苗の植付精度が向上する。
【0067】
また、ポテンショメータ125に設けたメータアーム126が切替カム80の回動状態を検出し、この検出結果に基づいてカム用モータ110の作動を切り替えることにより、苗植付部40の下降中にカム用モータ110が作動し過ぎて植付装置41を作動させてしまうことが防止されるので、空中で植付装置41が苗を掻き取ることがなく、苗の無駄を減少さえることができる。
【0068】
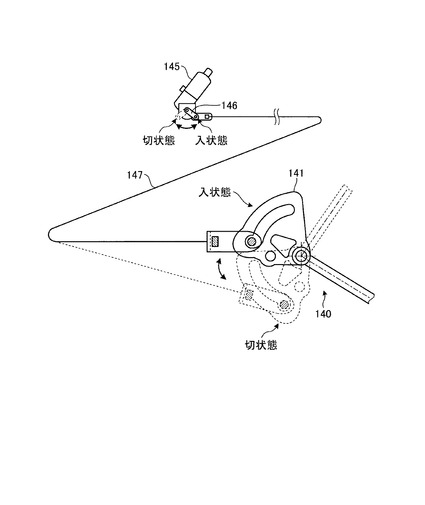
図9は、上昇検知センサの設置状態の説明図である。図10は、畦クラッチレバーの説明図である。苗植付部上昇機構50の油圧昇降シリンダ54には、苗植付部40の所定高さよりも上方への上昇を検知する上昇検知手段である上昇検知センサ142が備えられている。また、苗植付部40には、例えば2条等、所定数の植付装置41への駆動力の伝達と遮断とを切り替える部分条クラッチである畦クラッチ140と、畦クラッチ140を操作する部分条クラッチレバーである畦クラッチレバー141と、が備えられている。畦クラッチ140は、この畦クラッチレバー141によって、所定数の植付装置41を作動させる状態である「入状態」と、植付装置41を作動させない「切状態」とを切り替えることができる。なお、上記畦クラッチレバー141を「切状態」とすると、2条分の植付装置41が停止状態となる構成が苗移植機においては一般的である。
【0069】
さらに、本実施形態に係る苗移植機1は、上昇検知センサ142が苗植付部40の上昇を検知すると作動する駆動モータ145を有しており、駆動モータ145の出力軸には、切替アーム146が連結されている。通常、畦クラッチ140は、苗植付部40を上げた時は自動で切れるようになっており、苗植付部40を再び下げて植え付け作業を再開する際には、手動で操作をすることにより、畦クラッチ140を入状態にする。駆動モータ145は、苗植付部40の上昇を検知したら、停止した植付装置41を所定の時間の経過後に自動的に作動させることができるように設けられている。
【0070】
即ち、駆動モータ145は、切替アーム146と畦クラッチレバー141とが、クラッチレバー連繋手段であるクラッチレバー用ケーブル147で連結されることにより、当該駆動モータ145の駆動力によって畦クラッチ140の状態を切り替えることが可能になっている。詳しくは、クラッチレバー用ケーブル147は、駆動モータ145の作動時には、畦クラッチ140が駆動力を伝達する方向に、駆動モータ145の作動時の出力を、切替アーム146を介して畦クラッチレバー141に伝達することが可能になっている。
【0071】
上記の構成により、畦クラッチ140を「切状態」で作業した後、旋回時に苗植付部40が上昇すると全ての畦クラッチ140を「入状態」に切り替えるため、畦クラッチレバー141を操作した次の条で植付作業をする際に、畦クラッチレバー141を操作し忘れて一部の畦クラッチ140が「切状態」のまま植付作業が開始されることを防止できるので、苗の植え付け忘れが防止され、作業者が手作業で苗を植え付ける必要が無く、作業能率の向上と作業者の労力の軽減が図られる。
【0072】
なお、ハンドル31にポテンショメータを設け、このポテンショメータが検出するハンドル31の操舵角度が所定角度(例:120度〜180度)以上になると駆動モータ145が作動する構成とすると、一部の条の畦クラッチ140を「切状態」で作業した次の作業条で確実に全ての畦クラッチ140が「入状態」となるため、植え付け忘れがより確実に防止される。
【0073】
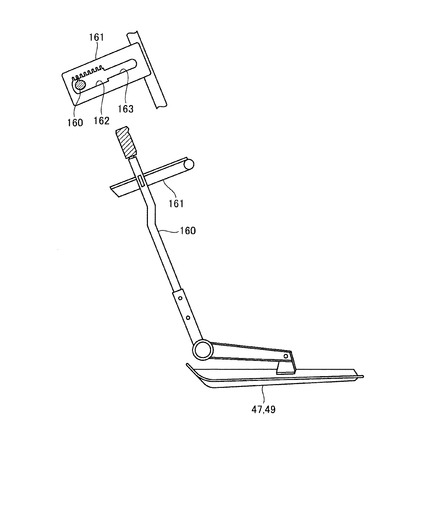
図11は、植付深さ調整レバーの説明図である。苗植付部40は、フロート47の高さを調節することにより、植付深さを調節可能になっている。例えば、サイドフロート49の高さは、植付深さ調整レバー160によって調節する。植付深さ調整レバー160は、調整ガイド部161に長孔状の孔として開設された深さ調整ガイド162に、上下方向に挿通されている。この深さ調整ガイド162は、長さ方向が走行車体2の前後方向になって形成されているため、深さ調整ガイド162は、前後方向に移動させることが可能になっている。また、深さ調整ガイド162の内壁には、上下方向の延びる複数の溝部が形成されており、植付深さ調整レバー160は、深さ調整ガイド162内における任意の位置で保持することができる。
【0074】
サイドフロート49は、この植付深さ調整レバー160の下端部に連結されており、植付深さ調整レバー160を深さ調整ガイド162に沿って移動させた場合には、サイドフロート49も前後方向に位置が変化する。この変化の方向は、植付深さ調整レバー160とサイドフロート49とで反対方向になっており、植付深さ調整レバー160を前方に移動させた場合には、サイドフロート49は後方に移動し、植付深さ調整レバー160を後方に移動させた場合には、サイドフロート49は前方に移動する。ここで、サイドフロート49は、前後方向に位置が変化する際には、その変化と共に上下方向の位置も変化するように植付深さ調整レバー160に連結されている。このため、サイドフロート49の高さを調節する際には、任意の高さになるように、植付深さ調整レバー160を深さ調整ガイド162に沿って移動させることによって調節する。
【0075】
また、深さ調整ガイド162には、後方側の端部にフロート収納溝163が連通している。即ち、深さ調整ガイド162とフロート収納溝163とは、1つの長孔状に形成されている。フロート収納溝163は、深さ調整ガイド162よりも後方側に位置しており、植付深さ調整レバー160は、このフロート収納溝163にも入り込ませることができる。植付深さ調整レバー160をフロート収納溝163にも入り込ませた場合には、植付深さ調整レバー160は、通常の使用時よりも前方に位置することになる。このため、植付深さ調整レバー160をフロート収納溝163にも入り込ませた場合には、サイドフロート49は、通常の使用時よりも前方に位置する状態になる。
【0076】
上記の構成により、苗移植機を軽トラックの荷台等に積載する際、サイドフロート49を前方に移動させることができるので、苗移植機を荷台の幅内に収めることができるので、苗移植機の搬送を行う際に特別な届出が不要となり、搬送作業能率が大幅に向上する。また、苗植付部40を下降させると調節レバー49が調整ガイド部161の長孔に沿って「浅」側に移動するので、サイドフロート49が上方に移動するため、苗植付部40を急速に下げた際にサイドフロート49が地面に接触しにくくなり、サイドフロート49の破損が防止される。
【0077】
本実施形態に係る苗移植機1は、以上のごとき構成からなり、以下、その作用について説明する。苗移植機1の運転時は、エンジン10で発生する動力によって、走行車体2の走行と、苗載せ部45に載せた苗の植え付け作業を行う。このうち、植え付け作業は、回転軸が左右方向になる向きで植付装置41全体が回転しながら、植付爪42も回転することにより、苗載せ部45に載せられた苗を徐々に圃場に植え付ける。植え付け作業時は、このように植付装置41を作動させながら圃場内を走行車体2で走行することにより、複数の列状に苗を植え付ける。
【0078】
このため、植え付け作業時は、苗移植機1を運転する作業者は、変速レバー35を前進に切り替え、苗植付部40を下降させた状態で作業を行う。この作業状態では、植付昇降レバー36は「下降」の位置に設定する(図8参照)。従って、植付昇降レバー36に連結されている切替カム80は、位置決めローラ105が位置決め部82の下降位置85に入った状態になる。
【0079】
走行車体2が圃場の端に到達すると、作業者はハンドル31を回動させることにより、走行車体2を旋回させる。ハンドル31の回動させた場合、この回動に伴ってステアリングアーム60が操舵シャフト32を中心として回動する。これにより、ステアリングアーム60のタイロッド連結部61に連結されている2本のタイロッドが移動し、それぞれのタイロッドが取り付けられている、左右の前輪ファイナルケース21のナックルアームが回動する。これにより、前輪4は回動するため、走行車体2は旋回を開始する。
【0080】
このとき、ステアリングアーム60の回動に伴って、ステアリングアーム60に取り付けられている取付ピン66は、操舵シャフト32を中心として回動しつつ、オートリフト作動アーム70のスプリング側連結部71から離れる方向に移動する。この取付ピン66とスプリング側連結部71とは、連結スプリング75によって連結しているため、取付ピン66がスプリング側連結部71から離れる方向に移動した場合には、スプリング側連結部71には、連結スプリング75の引張り力によって、取付ピン66の方向に向わせる力が作用する。
【0081】
スプリング側連結部71は、オートリフト作動アーム70の回動軸72を中心として回動可能になっているため、スプリング側連結部71に取付ピン66の方向に向わせる力が作用した場合には、スプリング側連結部71は、回動軸72を中心として回動することにより、取付ピン66の方向に移動する。また、オートリフト作動アーム70は、回動軸72を中心として全体が回動可能になっているため、スプリング側連結部71が、連結スプリング75の引張り力によって、取付ピン66の方向に移動した場合には、オートリフト作動アーム70全体が、回動軸72を中心として回動する。
【0082】
この場合、ケーブル側連結部73は、当該ケーブル側連結部73に連結されているアーム用ケーブル77を引っ張る方向に移動する。このため、アーム用ケーブル77の他端側が接続されているオートリフトアーム90は、ケーブル接続部91側の部分に、アーム用ケーブル77からの引張り力が作用する。これにより、オートリフトアーム90は、ケーブル接続部91側の部分が、アーム用ケーブル77の引張り力の方向である下方側に移動する。
【0083】
ここで、オートリフトアーム90は、自動切り替えモードの状態になっていたとする。即ち、オートリフトアーム90の孔に、バックリフトアーム95のロックピン101が入り込んでいたとする。この場合、オートリフトアーム90が下方に移動すると、ロックピン101を介して、バックリフトアーム95も下方に移動し、バックリフトアーム95に連結されている位置決めローラ105も下方に移動する。これにより、位置決めローラ105は、切替カム80の位置決め部82から外れる。
【0084】
他方、切替カム80には、スプリングによって付勢力が常時付与されているので(図6、矢印F方向)、位置決めローラ105が位置決め部82から外れると、切替カム80は、位置決めローラ105によって移動が規制されなくなるため、連結軸38を中心として、一気に付勢力の方向に回動する。これにより、切替カム80と一体となって回動する植付昇降レバー36も切替カム80と共に回動し、「上昇」の位置まで移動する。従って、苗植付部上昇機構50の油圧昇降シリンダ54への油路を切り替える切替バルブが「上昇」側へ切り替わり、苗植付部40は上方へ移動する。このように、作業者が圃場の端でハンドル31を回動させると、苗植付部40は自動的に上昇する。また、オートリフトアーム90は、オートリフト作動アーム70の作動に連動して切替カム80を苗植付部40の上昇状態に回動させる上昇アームとして設けられている。
【0085】
なお、作業者がオートリフトアーム90を手動で移動させることにより、オートリフトアーム90の孔からバックリフトアーム95のロックピン101を外した場合には、ハンドル31を回動させることによりオートリフトアーム90が下方に移動した場合でも、バックリフトアーム95は下方には移動しない。この場合、位置決めローラ105も下方には移動せず、切替カム80の位置決め部82からは外れないため、切替カム80は回動しない。従って、旋回操作時に苗植付部40の昇降状態は変化しないため、作業者は苗植付部40の昇降のタイミングを自分で計って行うことができる。これにより、旋回時の操作が煩雑になり操作性は低下するが、圃場条件や植付作業条件に沿った苗の植え付けが可能となる。
【0086】
また、走行車体2を旋回させるために、ハンドル31を回動させた場合、これらのように、ステアリングアーム60の回動に伴う連結スプリング75の引張り力がオートリフト作動アーム70に作用することにより、オートリフト作動アーム70が回動し、苗植付部40の自動上昇が行われるが、連結スプリング75は、弾力性と伸縮性とを有している。このため、ハンドル31を大きく回動させることにより、ステアリングアーム60が大きく回動し、オートリフト作動アーム70も大きく回動した際に、オートリフト作動アーム70には、オートリフトアーム90側からの抵抗によって、アーム用ケーブル77からの引張り力が大きくなって作用する場合がある。
【0087】
この場合、連結スプリング75の引張り力に対するオートリフト作動アーム70の抵抗が大きくなるため、取付ピン66がオートリフト作動アーム70から離れる方向への回動を継続した際に、連結スプリング75は伸縮性によって全長が伸びる。これにより、ステアリングアーム60は、オートリフト作動アーム70がそれ以上取付ピン66の方向に近付かなくても大きく回動することができるので、メカロックを発生させることなくステアリングアーム60を回動させることが可能になり、苗植付部40の上昇タイミングが速くなるので、苗の押し倒しが防止されて苗の生育が良好になる。
【0088】
図12〜図14は、カム用モータによって切替カムを回動させる場合の説明図である。オートリフトアーム90が、自動切り替えモードの状態になっている場合には、走行車体2の旋回に伴って苗植付部40は自動的に上昇するが、さらに走行車体2を旋回させていった場合、苗植付部40は自動的に下降する。即ち、苗移植機1には、当該苗移植機1に搭載されるセンサ類などの電子機器を制御する電子制御装置であるコントローラ200(図16参照)が搭載されており、後輪ギヤケース22には、後輪5の回転速度を検出することにより、走行車体2の車速を検出する車速センサ171(図16参照)が設けられている。
【0089】
コントローラ200は、カム用モータ110も制御可能になっているため、車速センサ171で検出した回転速度が、予め設定されている回転速度に達すると、カム用モータ110に駆動信号を出力する。カム用モータ110は、この駆動信号を受けて、切替カム80を移動させる。即ち、旋回中は苗植付部40は上昇位置に位置しているので、植付昇降レバー36は「上昇」位置にあり、位置決めローラ105は、上昇位置83に入った状態になっている。このため、コントローラ200は、カム用モータ110を、切替カム80が位置決め部82の上昇位置83が位置する方向に回動する方向に駆動させる。
【0090】
即ち、コントローラ200は、モータアーム112のモータ側ピン113が、切替カム80から離れる方向にカム用モータ110が駆動させる。これにより、カム側ピン116によって切替カム80に連結している植え付けアーム115が、切替カム80から離れる方向に引っ張られるため、切替カム80も、この力によって回動する。
【0091】
なお、位置決め部82に入り込んでいる位置決めローラ105は、スプリングの付勢力によって上方に付勢されているが、カム用モータ110の駆動力によって、切替カム80が強制的に回動する場合には、位置決めローラ105は、位置決め部82を順次乗り越えていく。このため、上昇位置83にあった位置決めローラ105は、停止位置84(図12)から下降位置85(図13)に移動する。つまり、切替カム80と植付昇降レバー36は、位置決めローラ105が下降位置85に位置するまで回動する。これにより、苗植付部40は下降する。また、このようにカム用モータ110を駆動させることにより切替カム80を回動させる場合、ポテンショメータ125によって切替カム80の状態を検出しながら、適切な角度になるように回動させる。
【0092】
さらに、コントローラ200は、カム用モータ110を駆動させることにより、位置決めローラ105が植付け位置86(図14)に位置するまで、切替カム80と植付昇降レバー36とを回動させる。これにより、苗植付部40の植付装置41は作動を開始し、苗の植え付けを再開する。
【0093】
図15は、変速レバーを後進に切り替える場合の説明図である。変速レバー35を後進に切り替えた場合、バックリフト入切レバー96の切欠き孔97に挿入されているバー107は、両端が変速レバー35とバー107とに接続されている変速レバーケーブル108に引っ張られて、下方に移動する。この場合において、バー107が切欠き孔97の縦長部分に位置するようにバックリフト入切レバー96が設定されている場合、バー107は、切欠き孔97の縦長部分を移動するに留まる。この場合、バー107は、バックリフト入切レバー96に対して何の作用も及ぼさず、切替カム80も、それまでの状態を維持する。
【0094】
これに対し、バー107が切欠き孔97の横長部分に位置するようにバックリフト入切レバー96が設定されている場合に、バー107が下方に移動すると、バー107は横長部分の下側縁に当接する。これにより、バー107はバックリフト入切レバー96を押し下げるため、バックリフト入切レバー96に連結されている位置決めローラ105も、下方に移動する。この場合、位置決めローラ105は、切替カム80の位置決め部82から外れる。
【0095】
従って、オートリフトアーム90が自動切り替えモードの状態におけるハンドル31の回動時と同様に、切替カム80と植付昇降レバー36とは、スプリングによる付勢力の方向に、連結軸38を中心として一気に回動し、「上昇」の位置まで移動する。これにより、苗植付部上昇機構50の油圧昇降シリンダ54への油路を切り替える切替バルブが「上昇」側へ切り替わり、苗植付部40は上方へ移動する。このように、バー107が切欠き孔97の横長部分に位置するようにバックリフト入切レバー96が設定されている状態で、変速レバー35を後進に切り替えると、苗植付部40は自動的に上昇する。
【0096】
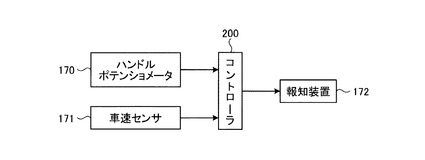
図16は、報知装置の説明図である。また、本実施形態に係る苗移植機1は、植付装置41が圃場の土中に入り込んだ状態で停止しているとみなして作業者に報知する報知手段である報知装置172を備えている。即ち、ハンドル31の近傍には、ハンドル31の操舵を検知する操舵検知部材であるハンドルポテンショメータ170が配設されており、後輪ギヤケース22には、走行車体2の走行速度及び進行方向を検出する走行検出手段である車速センサ171が配設されている。これらのハンドルポテンショメータ170と車速センサ171とは、共にコントローラ200に接続されており、報知装置172も、コントローラ200に接続されている。この報知装置172としては、例えばブザーが挙げられる。
【0097】
コントローラ200は、ハンドルポテンショメータ170や車速センサ171等から情報が逐次伝達されており、植付装置41が圃場の土中に入り込んだ状態で停止しているとみなした場合には、報知装置172であるブザーを鳴らす。この場合における判断は、例えば、植付装置41が停止した状態で、且つ、ハンドルポテンショメータ170がハンドル31の操舵を検知すると共に、車速センサ171が走行車体2の後進を検出した場合に、植付装置41が圃場の土中に入り込んだ状態で停止しているとみなす。つまり、後進時に植付装置41を停止させると、圃場の土の中に植付爪42が入った状態で止まり易い。このため、苗植付部40を下げた状態で後進した場合には、植付装置41が圃場の土中に入り込んでいるとみなして、作業者に報知する。
【0098】
上記の構成により、圃場の四隅で植付作業を行う場合等、直角(90度)旋回をする際に、次の直進位置に移動する際に圃場面を均すべく苗植付部40を下降させて後進する際に植付装置41に泥土が付着していても、作業者は植付走行開始前に植付装置41に泥土が付着しているかどうか、即ち、苗を掻き取る爪(フォーク)の間に泥土が詰まっていないかどうかを忘れずに確認することができるので、植付装置41が苗を取れず苗を植え付け損なうことが防止されるため、作業能率が向上するとともに、作業者が苗を手作業で植える必要が無く、作業者の労力が軽減される。
【0099】
また、一部の植付装置41で植え付け作業を行う場合には、畦クラッチ140を「入」の状態にして作業を行う。これにより、所定の一部の植付装置41のみで植え付け作業を行う。この場合でも、ハンドル31を操舵することによる旋回時は、自動的に苗植付部40が上昇するが、苗植付部40が上昇すると、畦クラッチ140を「切」の状態になる。このため、コントローラ200は、畦クラッチ140が「入」の状態で、上昇検知センサ142によって苗植付部40が上昇したことを検知した場合には、所定時間の経過後、例えば、上昇してから1秒後に、駆動モータ145を作動させる。これにより、クラッチレバー用ケーブル147によって駆動モータ145の駆動力が伝達される畦クラッチレバー141は、畦クラッチ140が「入」の状態になる。これにより、旋回を終了して植え付け作業を再開する際に、自動的に植え付け作業が行われる。
【0100】
また、苗移植機1の運搬等を行う場合には、植付深さ調整レバー160をフロート収納溝163に位置させる。これにより、サイドフロート49は、通常の使用時よりも前方に位置した状態になるため、苗移植機1の全長が短くなり、運搬を行い易くなる。
【0101】
以上の苗移植機1は、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、ステアリングアーム60とを、連結スプリング75で連結しているため、旋回初期では、ステアリングアーム60の回動を効果的にオートリフト作動アーム70に伝達することができる。これにより、旋回初期から苗植付部40を上昇させることができる。また、ステアリングアーム60を大きく回動させた場合には、連結スプリング75が伸びることにより、オートリフト作動アーム70の抵抗が大きくなった場合でも、必要以上にオートリフト作動アーム70を回動させることなく、ステアリングアーム60のみで自由に回動させることができる。これらの結果、メカロックを発生させることなく、旋回時により確実に苗植付部40を上昇させることができる。
【0102】
また、旋回時における苗植付部40の上昇が早くなるため、苗の押し倒しを防止することができる。さらに、メカロックを防止できるため、作業の中断が無くなり、作業効率を上場させることができる。
【0103】
また、植付昇降レバー36と連動する切替カム80を設け、オートリフト作動アーム70の作動時には、アーム用ケーブル77とオートリフトアーム90とによって切替カム80を回動さている。これにより、高価な電子部品を用いることなく、より確実に、ステアリングアーム60の回動に連動して苗植付部40を上昇させることができる。この結果、製造コストの上昇を抑えつつ、旋回時により確実に苗植付部40を上昇させることができる。
【0104】
また、連結スプリング75は、フロントフレーム8の後方側でステアリングアーム60とオートリフト作動アーム70とを連結しているため、圃場の泥土が連結スプリング75やオートリフト作動アーム70に付着し難くなる。これにより、泥土によって動作がロックされることを防止できる。また、泥土を取り除く作業が不要になり、メンテナンス性を向上させることができる。
【0105】
また、取付ピン66が、ステアリングアーム60の前側にあるため、ステアリングアーム60の回動量が少なくても、連結スプリング75が伸びる量を増加させることができる。これにより、苗植付部40を上昇させるタイミングが早くなるため、より確実に苗の押し倒しを防止することができる。また、取付ピン66は、ハンドル31が直進状態にあるときに、機体左右方向の中央部に位置しているため、左右どちらに旋回する場合でも、苗植付部40の上昇タイミングを同じタイミングにすることができ、操作性を向上させることができる。
【0106】
また、所定の条件のときに、報知装置172を作動させるため、植付装置41が苗を取れなくなることを防止できる。例えば、圃場の端など旋回途中で後進する必要がある場合、植付装置41の停止位置が土中に入り込む位置になり、このまま後進すると苗植付部40が自動上昇する際に、植付装置41に土が付着することがある。この場合、植付装置41で苗を取れなくなってしまうことがあるが、旋回途中で後進するときに、報知装置172を作動させることにより、植付装置41に土が付着することを作業者に知らせることができる。従って、苗植付部40が上昇してから後進することができ、植付装置41が苗を取れなくなることを防止できる。
【0107】
また、苗植付部40を上昇さえると、自動的に畦クラッチ140が「入」側に操作されることにより、畦クラッチ140を「切」にして作業した次の工程で畦クラッチ140を「入」にし忘れることを防止できる。従って、苗が植え付けられない区間の発生を防止でき、作業者が手作業で植え付ける作業を不要にすることができる。また、駆動モータ145は、畦クラッチ140を「入」側にする場合にのみ作動し、負荷が小さいため、耐久性を向上させることができる。
【0108】
図17は、実施形態に係る苗移植機の変形例であり、作溝器の斜視図である。図18は、図17に示す作溝器の断面図である。なお、施肥装置150では、肥料は作溝器156から撒くが、肥料の出口である作溝器156は、出口は泥等が入ったり、肥料が水に濡れて固まったりして詰まり易くなっている。このため、作溝器156は、詰まりを除去する構造にしてもよい。例えば、図17、図18に示すように、作溝器156には、回動軸213を中心として回動する除去プレート212を設けてもよい。この除去プレート212は、開閉ワイヤー214によって回動することができ、通常時は作溝器156の側壁の一部として構成される。また、作溝器156内に堆積物があると判断された場合には、開閉ワイヤー214を引っ張ることにより、回動軸213を中心として除去プレート212を回動させ、作溝器156内の堆積物216を、除去プレート212によって作溝器開口部211から押し出す。この除去プレート212の開閉は、作業者が任意で行ってもよく、または、作溝器156にセンサを設け、堆積物216が溜まったことを検知したら、モータによって自動的に開閉させることにより、堆積物216を押し出してもよい。これにより、より確実に肥料を撒くことができ、苗の生育を促進させることができる。
【0109】
図19は、実施形態に係る苗移植機の変形例であり、苗補給時ステップの概略図である。また、植え付け作業中に、苗載せ部45に載置している苗が無くなった場合には、予備苗載台130の苗を苗載せ部45に移すため、作業者は一旦苗移植機1から降りる必要がある。この場合、圃場は足場が悪く、作業性が悪いため、苗を移す際の足場を設けてもよい。例えば、図19に示すように、走行車体2の予備苗載台130の近傍における前方から側方にかけて、苗補給時ステップ220を設けてもよい。これにより、苗載せ部45に苗を補給するために予備苗載台130から苗を取る際には、苗補給時ステップ220に足をかけて、または、苗補給時ステップ220に乗って苗を取ることができるので、補給作業を容易に行うことができる。
【0110】
図20は、実施形態に係る苗移植機の変形例であり、油圧昇降シリンダの概略図である。また、苗植付部40の昇降は、油圧昇降シリンダ54を伸縮させることにより行うが、油圧昇降シリンダ54の作動時には、バランススプリング230とスプリングカバー231とが干渉することにより、異音が発生する場合がある。このため、この異音を除去する部材を設けてもよい。例えば、図20に示すように、スプリングカバー231の下部に、油を含む樹脂部材である含油部材232を配設してもよい。これにより、給油を容易に行うことができるため、異音の発生を抑えることができる。
【0111】
また、苗植付部40は、圃場のみでなく、路上を走行する場合があるが、路上走行は、圃場での走行よりも走行抵抗が小さいため、小さな駆動力で走行することができる。このため、副変速レバーの「植付速」と「走行速」とで変速比を異ならせ、路上走行時は植え付け作業時と比較してエンジン回転数が低くなるようにしてもよい。これにより、燃費の向上を図ることができる。
【0112】
また、操縦席28は、通常前後方向の位置を調節可能になっており、これにより、作業者の体格の違いをカバーしているが、操縦席28は、単に前後方向にスライドするのみでなく、後方に向かうに従って、上方にも移動するようになっているのが好ましい。即ち、体が大きい作業者は、体が小さい作業者と比較して足の長さも長いため、操縦席28を、後方に向うに従って位置が高くなるようにすることにより、より確実に、どんな体格の作業者でも、快適に作業を行うことを可能にすることができる。
【0113】
また、実施形態に係る苗移植機1では、連結スプリング75は2本が用いられているが、連結スプリング75は1本でもよい。また、実施形態に係る苗移植機1では、伸縮部材として連結スプリング75が用いられているが、伸縮部材は、スプリング以外のものでもよく、例えば、伸縮可能なシリンダを用いてもよい。また、伸縮部材としてスプリングを用いる場合には、スプリングを覆うスプリングカバー75a(図5参照)を設けるのが好ましい。これにより、スプリングに泥等が付着したり、また、スプリングを複数用いる場合は、スプリングが撓んでスプリング同士が絡まったりすることを防止することができる。
【符号の説明】
【0114】
1 苗移植機
2 走行車体
4 前輪
5 後輪
7 メインフレーム
8 フロントフレーム
10 エンジン
21 前輪ファイナルケース
22 後輪ギヤケース
25 フロアステップ
31 ハンドル
32 操舵シャフト
35 変速レバー
36 植付昇降レバー
40 苗植付部
41 植付装置
47 フロート
50 苗植付部上昇機構
54 油圧昇降シリンダ
60 ステアリングアーム
66 取付ピン
70 オートリフト作動アーム
75 連結スプリング
77 アーム用ケーブル
80 切替カム
81 位置決め孔
82 位置決め部
90 オートリフトアーム
95 バックリフトアーム
96 バックリフト入切レバー
105 位置決めローラ
110 カム用モータ
120 プレート
125 ポテンショメータ
130 予備苗載台
【技術分野】
【0001】
本発明は、圃場に水稲等の作物の苗を植え付ける苗移植機に関するものである。
【背景技術】
【0002】
苗移植機で圃場を往復しながら植付作業を行う時、走行車体が圃場の端に達した際に旋回を行うが、従来の苗移植機では、旋回走行時に、植え付けた苗を倒すことを防止可能な構成としている。例えば、特許文献1に記載された走行車両や、特許文献2に記載された苗植機では、旋回の開始時及び終了時には、作業者がレバーを操作して植付部を昇降させることにより、植え付けた苗を倒すことを防ぎつつ旋回することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−195232号公報
【特許文献2】特開2009−232841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、レバーを操作して植付部を昇降させる場合、旋回時の操作が煩雑になるため、作業能率や操作性が低下し易くなる。このため、作業能率の低下を抑えつつ、旋回走行を行う手法として、ハンドルの操作に連動して植付部を自動的に昇降させる手法が考えられる。この手法を実現する構成としては、ハンドルの操作に連動して回動するステアリングアームと、植付部の昇降シリンダを作動させる作動アームとを連結し、ハンドル操作時には、作動アームをステアリングアームの回動に連動させることにより、植付部を昇降させることが挙げられる。
【0005】
しかし、このようにステアリングアームと作動アームとを直接連結した場合には、ハンドルの操作量が大きくなって、ステアリングアームと作動アームの作動量が大きくなった際に、メカロックが発生してハンドルが戻らなくなることが考えられる。また、このメカロックを考慮して、ハンドルの操作量が大きくなってから作動アームが作動するように調節した場合、ハンドルを大きく切らないと植付部が昇降しないため、旋回開始時に植付部を上昇させるタイミングが遅くなり、植付部が圃場に植え付けられた苗に接触して押し倒してしまう虞がある。この場合、倒れた苗を見つけ出して植え直す作業が必要となるため、作業者の労力が増加することにつながることが考えられる。
【0006】
本発明は、上記に鑑みてなされたものであって、メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決すると共に、目的を達成すべく、本発明に係る苗移植機は、走行車体(2)に設けられて前記走行車体(2)を操舵する操舵部材(31)と、前記走行車体(2)の後部に配設されると共に、苗を圃場に植え付ける苗植付部(40)と、前記苗植付部(40)の下部に位置し、前記苗植付部(40)に載置した苗を前記圃場に植え付ける植付装置(41)と、前記苗植付部(40)を上昇させる苗植付部上昇機構(50)と、前記操舵部材(31)を操舵することにより回動する旋回連動アーム(60)と、前記旋回連動アーム(60)の回動に連動し、前記苗植付部上昇機構(50)を作動させることができる作動アーム(70)と、伸縮性を有して前記旋回連動アーム(60)と前記作動アーム(70)とを連結することにより、双方の距離が変化可能な状態で前記旋回連動アーム(60)の回動を前記作動アーム(70)に伝達する伸縮部材(75)とを備えることを特徴とする。
【0008】
また、請求項2記載の発明は、請求項1に記載の苗移植機において、前記苗植付部(40)の動作状態を、少なくとも前記苗植付部上昇機構(50)による上昇状態を含んで切り替えることができる植付昇降レバー(36)と、前記植付昇降レバー(36)と連動して回動することにより、前記苗植付部(40)の動作状態を切り替え可能な切替カム(80)と、前記作動アーム(70)の作動に連動して前記切替カム(80)を前記苗植付部(40)の上昇状態に回動させる上昇アーム(90)と、前記上昇アーム(90)と前記作動アーム(70)とを連結して前記作動アーム(70)の動作を前記上昇アーム(90)に伝達するアーム連繋部材(77)とを備えることを特徴とする。
【0009】
また、請求項3記載の発明は、請求項1または2に記載の苗移植機において、前記伸縮部材(75)は、前記走行車体(2)が有する前側フレーム(8)の後方側で前記旋回連動アーム(60)と前記作動アーム(70)とを連結することを特徴とする。
【0010】
また、請求項4記載の発明は、請求項1から3のいずれか1項に記載の苗移植機において、前記旋回連動アーム(60)には、前記旋回連動アーム(60)の回動支点よりも前側に前記伸縮部材(75)を取り付ける取付部材(66)が設けられており、前記取付部材(66)は、前記操舵部材(31)が直進位置にあるときに、前記走行車体(2)における機体左右方向の中央部に位置することを特徴とする。
【0011】
また、請求項5記載の発明は、請求項1から4のいずれか1項に記載の苗移植機において、前記操舵部材(31)の操舵を検知する操舵検知部材(170)と、前記走行車体(2)の走行速度及び進行方向を検出する走行検出手段(171)と、前記植付装置(41)が停止した状態であり、且つ、前記操舵検知部材(170)が前記操舵部材(31)の操舵を検知すると共に、前記走行検出手段(171)が前記走行車体(2)の後進を検出した場合には、前記植付装置(41)が前記圃場の土中に入り込んだ状態で停止しているとみなして作業者に報知する報知手段(172)とを備えることを特徴とする。
【0012】
また、請求項6記載の発明は、請求項1から5のいずれか1項に記載の苗移植機において、所定数の前記植付装置(41)への駆動力の伝達と遮断とを切り替える部分条クラッチ(140)と、前記部分条クラッチ(140)を操作する部分条クラッチレバー(141)と、前記苗植付部(40)の上昇を検知する上昇検知手段(142)と、前記上昇検知手段(142)が前記苗植付部(40)の上昇を検知すると作動する駆動モータ(145)と、前記駆動モータ(145)の出力軸に連結される切替アーム(146)と、前記切替アーム(146)と前記部分条クラッチレバー(141)とを連結すると共に、前記駆動モータ(145)の作動時には前記部分条クラッチ(140)が前記駆動力を伝達する方向に、前記駆動モータ(145)の作動時の出力を前記切替アーム(146)を介して前記部分条クラッチレバー(141)に伝達するクラッチレバー連繋手段(147)とを備えることを特徴とする。
【発明の効果】
【0013】
請求項1記載の苗移植機は、伸縮部材で旋回連動アームと作動アームを連結し、旋回連動アームと作動アームの距離を変化可能に構成したことにより、伸縮部材の張力により旋回連動アームの回動量以上に作動アームを回動させることができるので、旋回時の植付部上昇が早くなり、苗の押し倒しが防止される。また、操舵部材を大きく操作した際に伸縮部材が伸びることにより、旋回連動アームと作動アームがメカロックして動かなくなることを防止できるので、作業の中断が無く、作業能率が向上する。
【0014】
請求項2記載の苗移植機は、請求項1の発明の効果に加えて、切替カムを苗植付部の上昇状態に回動させる上昇アームと、旋回連動アームの回動に連動して苗植付部上昇機構を作動させる作動アームをアーム連結部材で連結したことにより、操舵部材を操作して走行車体を旋回させる際に苗植付部上昇機構を作動させることができるので、操縦者は旋回の際に苗植付部の上昇操作を行なう必要が無く、旋回操作に集中でき、旋回時の操作性が向上する。
【0015】
請求項3記載の苗移植機は、請求項1または2の発明の効果に加えて、前側フレームの後方側で旋回連動アームと作動アームを連結したことにより、圃場の泥土が旋回連動アームや作動アームに付着しにくくなり、泥土により動作がロックされることが防止される。
また、付着した泥土を取り除く作業が不要となり、メンテナンス性が向上する。
【0016】
請求項4記載の苗移植機は、請求項1から3のいずれかの発明の効果に加えて、取付部材を旋回連動アームの前側に配置したことにより、旋回連動アームの回動量が少なくても伸縮部材の伸びる量が増えるため、苗植付部の上昇タイミングが早くなるので、苗植付部が苗を押し倒すことが防止される。また、操舵部材が直進位置にあるとき、取付部材が機体左右方向の中央部に位置する構成としたことにより、左右どちらに旋回するときでも苗植付部の上昇タイミングを同じにすることができ、操作性が向上する。
【0017】
請求項5記載の苗移植機は、請求項1から4のいずれかの発明の効果に加えて、植付装置を停止させ、操舵検知部材が旋回操作を検知した状態で、且つ走行検出手段が後進を検知すると報知部材が作動する構成としたことにより、後進停止時に植付装置が土に潜り込む位置で停止することを報知することができるので、植付作業の再開前に植付装置に付着した泥土を除去すれば植付装置が確実に苗を取れる状態となるため、苗の植付精度が向上する。
【0018】
請求項6記載の苗移植機は、請求項1から5のいずれかの発明の効果に加えて、 苗植付部を上昇させると自動的に部分条クラッチが「入」側に操作されることにより、部分条クラッチを「切」にして作業をした次の工程で、部分条クラッチを「入」にし忘れることを防止できるので、苗が植え付けられない区間の発生が防止され、作業者が手作業で植え付ける作業が不要となる。また、駆動モータが部分条クラッチ「入」側にのみ作動するので、負荷が小さく、耐久性が向上する。
【図面の簡単な説明】
【0019】
【図1】図1は、実施形態に係る苗移植機の概略図である。
【図2】図2は、図1のA−A矢視図である。
【図3】図3は、ステアリングアームの平面図である。
【図4】図4は、図3のB−B矢視図である。
【図5】図5は、図3のB−B矢視図であり、スプリングカバーを設けた場合の説明図である。
【図6】図6は、切替カム付近を示す斜視図である。
【図7】図7は、切替カムの正面図である。
【図8】図8は、植付昇降レバーと切替カムとの関係を示す説明図である。
【図9】図9は、上昇検知センサの設置状態の説明図である。
【図10】図10は、畦クラッチレバーの説明図である。
【図11】図11は、植付深さ調整レバーの説明図である。
【図12】図12は、カム用モータによって切替カムを回動させる場合の説明図である。
【図13】図13は、カム用モータによって切替カムを回動させる場合の説明図である。
【図14】図14は、カム用モータによって切替カムを回動させる場合の説明図である。
【図15】図15は、変速レバーを後進に切り替える場合の説明図である。
【図16】図16は、報知装置の説明図である。
【図17】図17は、実施形態に係る苗移植機の変形例であり、作溝器の斜視図である。
【図18】図18は、図17に示す作溝器の断面図である。
【図19】図19は、実施形態に係る苗移植機の変形例であり、苗補給時ステップの概略図である。
【図20】図20は、実施形態に係る苗移植機の変形例であり、油圧昇降シリンダの概略図である。
【発明を実施するための形態】
【0020】
以下に、本発明に係る苗移植機の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
【0021】
〔実施形態〕
図1は、実施形態に係る苗移植機の概略図である。図2は、図1のA−A矢視図である。なお、以下の説明においては、前後、左右の方向基準は、操縦席からみて、車体の走行方向を基準として、前後、左右の基準を規定している。同図に示す苗移植機1の走行車体2は、左右一対の前輪4と、同様に左右一対の後輪5とを有しており、走行時には各車輪が駆動する四輪駆動車としている。また、走行車体2の後部には、苗植付部上昇機構50によって昇降可能な苗植付部40が備えられている。
【0022】
この走行車体2は、車体の略中央に配置されたメインフレーム7と、このメインフレーム7の上に搭載されたエンジン10と、エンジン10の動力を駆動輪と苗植付部40とに伝える動力伝達装置15と、を備えている。つまり、本実施形態に係るこの苗移植機1では、エンジン10の動力が走行車体2を前進や後進にさせるために用いるのみでなく、苗植付部40を駆動させるためにも使用され、ディーゼル機関やガソリン機関等の熱機関が用いられる。
【0023】
また、エンジン10は、走行車体2の左右方向における略中央で、且つ、作業者が乗車時に足を載せるフロアステップ25よりも上方に突出させた状態で配置されている。また、フロアステップ25は、走行車体2の前部とエンジン10の後部との間に渡って設けられており、メインフレーム7上に取り付けられており、その一部を格子状になることにより、靴に付いた泥を圃場に落とせるようになっている。また、このフロアステップ25の後方には、後輪5のフェンダを兼ねたリアステップ26が設けられている。このリアステップ26は、後方に向うに従って上方に向う方向に傾斜した傾斜面を有しており、エンジン10の左右それぞれの側方に配置されている。
【0024】
エンジン10は、これらのフロアステップ25とリアステップ26とから上方に突出しており、これらのステップから突出している部分には、エンジン10を覆うエンジンカバー11が配設されている。即ち、エンジンカバー11は、フロアステップ25とリアステップ26とから上方に突出した状態で、エンジン10を覆っている。
【0025】
また、走行車体2には、エンジンカバー11の上部に操縦席28が設置されており、操縦席28の前方で、且つ、走行車体2の前部には、フロントカバー30が配設されている。このフロントカバー30は、フロアステップ25の床面から上方に突出した状態で配置されており、フロアステップ25の前部側を左右に分断している。
【0026】
このフロントカバー30の内部には、各種の操作装置やエンジン用燃料の燃料タンク等が配設されている。また、フロントカバー30の上部には、操作装置を作動させる操作レバー等や計器類、ハンドル31が配設されている。このハンドル31は、作業者が前輪4を操舵操作することにより走行車体2を操舵する操舵部材として設けられており、フロントカバー30内の操作装置等を介して前輪4を転舵させることが可能になっている。また、レバーとしては、走行車体2の走行状態を切り替える変速レバー35と、苗植付部40の動作状態を、少なくとも苗植付部上昇機構50による上昇状態を含んで切り替えることができる植付昇降レバー36と、が配設されている。具体的には、植付昇降レバー36は、苗植付部40の昇降状態を切り替えることが可能になっている。
【0027】
また、フロアステップ25におけるフロントカバー30の左右それぞれの側方に位置する部分には、補給用の苗を載せておく予備苗載台130が配置されている。この予備苗載台130は、フロアステップ25の床面から突出した支持軸(鉛直軸)によって回転自在に支持されており、作業者の手によって回動させることが可能になっている。
【0028】
また、動力伝達装置15は、主変速機としての油圧式無段変速機16と、この油圧式無段変速機16にエンジン10からの動力を伝えるベルト式動力伝達機構17と、を有している。このうち、油圧式無段変速機16とは、HST(Hydro Static Transmission)と云われる静油圧式の無段変速機として構成されている。このため、油圧式無段変速機16は、エンジン10からの動力で駆動する油圧ポンプによって油圧を発生させ、この油圧を油圧モータで機械的な力(回転力)に変換して出力する。
【0029】
この油圧式無段変速機16は、エンジン10よりも前方で、且つ、フロアステップ25の床面よりも下方に配置されており、本実施形態に係る苗移植機1では、走行車体2の上面から見て、エンジン10の前方に配置されている。
【0030】
また、ベルト式動力伝達機構17は、エンジン10の出力軸に取り付けたプーリと、油圧式無段変速機16の入力軸に取り付けたプーリと、双方のプーリに巻き掛けたベルトと、さらに、このベルトの張力を調整するテンションプーリと、を備えている。これにより、ベルト式動力伝達機構17は、エンジン10で発生した動力を、ベルトを介して油圧式無段変速機16に伝達可能になっている。
【0031】
さらに、動力伝達装置15は、エンジン10からの出力がベルト式動力伝達機構17と油圧式無段変速機16とを介して伝達されるミッションケース18を有している。このミッションケース18は、メインフレーム7の前部に取り付けられている。ミッションケース18は、ベルト式動力伝達機構17と油圧式無段変速機16とを介して伝達されたエンジン10からの出力を、当該ミッションケース18内の副変速機で変速して、前輪4と後輪5への走行用動力と、苗植付部40への駆動用動力とに分けて出力可能になっている。
【0032】
このうち、走行用動力は、一部が左右の前輪ファイナルケース21を介して前輪4に伝達可能になっており、残りが左右の後輪ギヤケース22を介して後輪5に伝達可能になっている。左右それぞれの前輪ファイナルケース21は、ミッションケース18の左右それぞれの側方に配設されており、左右の前輪4は、車軸を介して左右の前輪ファイナルケース21に連結されている。また、この前輪ファイナルケース21は、ハンドル31の操舵操作に応じて駆動し、前輪4を転舵させることが可能になっている。同様に、左右それぞれの後輪ギヤケース22には、車軸を介して後輪5が連結されている。一方、駆動用動力は、走行車体2の後部に設けた植付クラッチ(図示省略)に伝達され、この植付クラッチの係合時に植付伝動軸(図示省略)によって苗植付部40へ伝達される。
【0033】
また、走行車体2の後部に備えられる苗植付部40を昇降させる苗植付部上昇機構50は、昇降リンク装置51を有しており、苗植付部40は、この昇降リンク装置51を介して走行車体2に取り付けられている。この昇降リンク装置51は、走行車体2の後部と苗植付部40とを連結させる平行リンク機構52を備えている。この平行リンク機構52は、上リンクと下リンクとを有しており、これらのリンクが、メインフレーム7の後部端に立設した背面視門方のリンクベースフレーム53に回動自在に連結され、各リンクの他端側が苗植付部40に回転自在に連結されることにより、苗植付部40を昇降可能に走行車体2に連結している。
【0034】
また、苗植付部上昇機構50は、油圧によって伸縮する油圧昇降シリンダ54を有しており、油圧昇降シリンダ54の伸縮動作によって、苗植付部40を昇降させることが可能になっている。苗植付部上昇機構50は、その昇降動作によって、苗植付部40を非作業位置まで上昇させたり、対地作業位置(対地植付位置)まで下降させたりすることが可能になっている。
【0035】
また、苗植付部40は、苗を植え付ける範囲を複数の区画、或いは複数の列で植え付けることができ、本実施形態に係る苗移植機1では、苗を4つの区画で植え付ける、いわゆる4条植の苗植付部40になっている。この苗植付部40は、植付装置41と、苗載せ部45及びフロート47を備えている。このうち、苗載せ部45は、走行車体2の左右方向において仕切られた植付条数分の苗載せ面46を有しており、それぞれの苗載せ面46に土付きのマット状苗が載置することが可能になっている。これにより、苗載せ部45に載置した苗が植え付けられて無くなるたびに、圃場外に用意している苗を取りに戻る必要が無く、連続した作業を行えるので、作業能率が向上する。
【0036】
また、植付装置41は、苗載せ部45に載置された苗を圃場に植え付ける装置になっている。この植付装置41は、2条毎に1つずつ配設されており、2条分の植付爪42を備えている。また、フロート47は、走行車体2の移動と共に、圃場面上を滑走して整地するものであり、走行車体2の左右方向における苗植付部40の中央に位置するセンターフロート48と、左右方向における苗植付部40の両側に位置するサイドフロート49と、を有している。
【0037】
また、走行車体2における操縦席28の後方には、施肥装置150が搭載されている。この施肥装置150は、肥料を貯蔵する肥料タンク151と、肥料タンク151内の肥料を一定量ずつ下方に繰り出す肥料繰出部152と、繰り出された肥料を施肥ホース154によって苗植付部40側に移送するブロア153と、を有している。さらに、施肥装置150は、苗植付部40の下方に配設されると共に、施肥ホース154によって肥料が移送される施肥ガイド155と、施肥ガイド155の前側に設けられると共に、施肥ホース154によって移送された肥料を、苗植付条の側部近傍に形成される施肥溝内に落とし込む作溝器156と、を有している。
【0038】
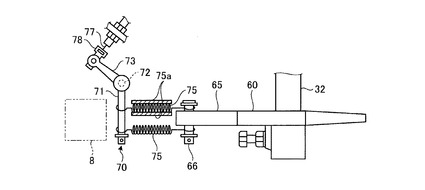
図3は、ステアリングアームの平面図である。図4は、図3のB−B矢視図である。走行車体2には、ハンドル31の操舵を受けて前輪4を回動させるステアリングアーム60が、走行車体2の前方底部側に配設されている。即ち、ステアリングアーム60は、当該ステアリングアーム60に連結される操舵シャフト32が、ハンドル31の回転時に回転トルクが、ピニオン機構、またはパワステ機構を介して伝達されることにより回動し、この操舵シャフト32の回動に伴ってステアリングアーム60も回動する。このように、ハンドル31の操舵時は、ステアリングアーム60は、操舵シャフト32を回動支点として回動し、また、ステアリングアーム60は、ハンドル31を操舵することにより回動する旋回連動アームとなっている。
【0039】
このステアリングアーム60の左右方向における両端には、それぞれタイロッド(図示省略)が連結されるタイロッド連結部61が形成されている。このタイロッド連結部61に連結される2本のタイロッドは、左右の前輪ファイナルケース21に取り付けられているナックルアーム(図示省略)に連結されており、ステアリングアーム60の動きをナックルアームに伝達可能になっている。これらにより、ハンドル31を操舵することにより、左右の前輪4の操舵が可能になっている。
【0040】
また、ステアリングアーム60は、左右方向における中央付近に、前方に延在する回動伝達部65を有しており、回動伝達部65の先端、即ち、回動伝達部65における操舵シャフト32が位置する側の反対側の端部付近に、取付ピン66が配設されている。この取付ピン66は、ハンドル31が直進位置にあるときに、走行車体2における機体左右方向の中央部に位置している。
【0041】
上記の構成により、ステアリングアーム60を左右どちらに回動させても回動量が略同じになるので、作業者は旋回操作方向が左右どちらでも同じ操作を行えばよいので、操作性が向上する。また、後述の連結スプリング75の張力により、オートリフト作動アーム70の回動量をステアリングアーム60の回動量よりも多くする作用を、左右方向のどちらにも均等に働かせることができるので、左右方向どちらの旋回時でも苗植付部40の上昇タイミングを速くすることができるので、苗植付部40が苗を押し倒すことが防止される。
【0042】
また、このステアリングアーム60の前方には、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができる作動アームであるオートリフト作動アーム70が配設されている。オートリフト作動アーム70は、ステアリングアーム60の取付ピン66に対して、連結スプリング75によって連結されている。この連結スプリング75は、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態で、ステアリングアーム60の回動をオートリフト作動アーム70に伝達する伸縮部材として用いられている。さらに、連結スプリング75は、2本が用いられており、2本の連結スプリング75は、ステアリングアーム60が有する上面側と下面側とで、取付ピン66とオートリフト作動アーム70とを連結している。
【0043】
また、このように、取付ピン66は、連結スプリング75を取り付ける取付部材としてステアリングアーム60に設けられており、ステアリングアーム60の回動支点よりも前側に配設されている。また、オートリフト作動アーム70における連結スプリング75との連結部分は、走行車体2が有する前側フレームであるフロントフレーム8の後方側に位置している。このため、連結スプリング75は、フロントフレーム8の後方側で、ステアリングアーム60とオートリフト作動アーム70とを連結している。
【0044】
上記の構成により、フロントフレーム8がステアリングアーム60とオートリフト作動アーム70、及び連結スプリング75の防護壁となるので、圃場の泥土や水が跳ね上がった際にステアリングアーム60とオートリフト作動アーム70、及び連結スプリング75に泥土や水が付着することが防止され、付着した泥土や水を除去する作業に要する時間が減少するため、メンテナンス性が向上すると共に、作業者の労力が軽減される。また、除去されなかった泥土や水により、ステアリングアーム60とオートリフト作動アーム70、及び連結スプリング75が劣化することを防止できるので、耐久性が向上すると共に、旋回操作時の挙動が変化することがなく、操作性が維持される。
【0045】
また、オートリフト作動アーム70は、上方に向うスプリング側連結部71と、一端がスプリング側連結部71に連結されて水平に横に伸びる軸である回動軸72と、回動軸72における他端側に連結されると共に、連結部分から上方に延びるケーブル側連結部73と、を有している。さらに、ケーブル側連結部73の上端部分には、アーム用ケーブル77が、連結部材78によって回動自在に接続されている。このように構成されるオートリフト作動アーム70は、回動軸72を中心として一体となって回動可能になっており、これにより、スプリング側連結部71とケーブル側連結部73とは、回動軸72を中心とする方向に回動する。
【0046】
連結スプリング75は、このうちスプリング側連結部71に連結しており、ステアリングアーム60とスプリング側連結部71との距離を変化させることができる状態で、双方を連結している。なお、このようにステアリングアーム60とオートリフト作動アーム70とを連結する連結スプリング75は、ハンドル31が直進位置にあるときには、自由長になるように、相対的な位置関係、及び連結スプリング75の特性が設定されている。
【0047】
上記の構成により、連結スプリング75の張力を利用してオートリフト作動アーム70の回動量をステアリングアーム60の回動量よりも多くすることができるので、旋回時に苗植付部40が上昇を開始するタイミングが速くなるため、苗植付部40が圃場に植え付けた苗を押し倒すことが防止され、苗の損傷が防止されて生育が安定する。また、連結スプリング75を上下方向に2本設けたことにより、ハンドル31を操作した際のオートリフト作動アーム70の回動量をステアリングアーム60の回動量よりもいっそう多くすることができるので、ハンドル31の操作角度が小さい段階で苗植付部40が上昇するため、苗植付部40が圃場に植え付けた苗を押し倒すことが防止され、苗の損傷が防止されて生育が安定する。
【0048】
なお、図5で示す通り、連結スプリング75を上下方向に2本設けるときは、上側の連結スプリング75の外周を覆うスプリングカバー75aを設ける構成としてもよい。これにより、旋回操作時に伸張した上下の連結スプリング75,75が、旋回操作終了時に収縮する際に噛み合って十分に収縮しなくなることや、次の旋回操作時にハンドル31の操作量と合致しない伸張量になることを防止できるので、苗植付部40の上昇のタイミングが遅くなることが防止され、苗植付部40による苗の押し倒しが防止される。
【0049】
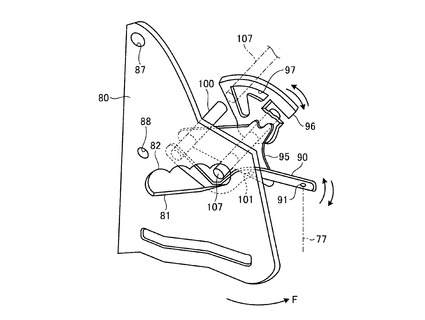
図6は、切替カム付近を示す斜視図である。図7は、切替カムの正面図である。オートリフト作動アーム70に接続されるアーム用ケーブル77の他端側は、ハンドル31の操舵に応じて苗植付部40を自動的に上昇させる機構であるオートリフト機構を構成するオートリフトアーム90に接続されている。即ち、アーム用ケーブル77は、オートリフトアーム90とオートリフト作動アーム70とを連結して、オートリフト作動アーム70の動作をオートリフトアーム90に伝達するアーム連繋部材として設けられている。オートリフト機構は、他に切替カム80、バックリフトアーム95、バックリフト入切レバー96、位置決めローラ105を有して構成されている。
【0050】
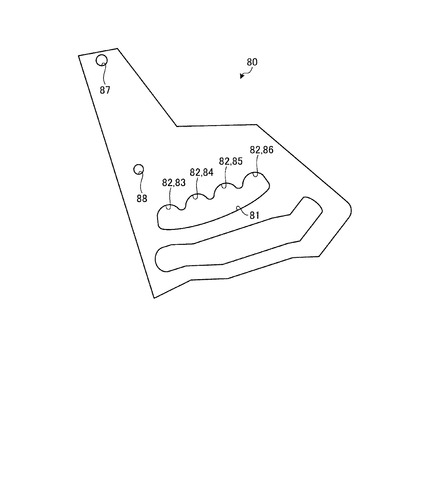
これらの各部材について説明すると、切替カム80は、板状の部材によって形成されており、中央付近に横長形状の孔である位置決め孔81が形成されており、この位置決め孔81の上側端縁には、上方に凸となる円弧状に形成される4つの位置決め部82が形成されている。即ち、位置決め孔81の上側端縁には、第1位置である上昇位置83と、第2位置である停止位置84と、第3位置である下降位置85と、第4位置である植付け位置86と、の4つの位置決め部82が形成されている。位置決めローラ105は、先端部分が、この位置決め孔81に挿入されている。また、位置決めローラ105には、スプリング(図示省略)によって上方の付勢力が常時付与されているため、位置決めローラ105は、4つの位置決め部82のいずれかに半分程度嵌められた状態になる。
【0051】
切替カム80における位置決めローラ105が挿入される側、即ち、位置決めローラ105が位置する側には、バックリフトアーム95が位置しており、さらに、バックリフトアーム95における切替カム80が位置する側の反対側には、バックリフト入切レバー96が位置している。オートリフト作動アーム70は、これらのうち、切替カム80とバックリフトアーム95との間に配設されている。
【0052】
オートリフト作動アーム70とバックリフトアーム95とは、一端が共通の支持軸100によって、回動自在に連結している。また、オートリフトアーム90における支持軸100に連結している側の端部の反対側の端部は、ケーブル接続部91が位置しており、アーム用ケーブル77は、このケーブル接続部91に接続されている。
【0053】
また、バックリフトアーム95には、オートリフトアーム90の方向に突出したロックピン101が設けられている。一方、オートリフトアーム90には、このロックピン101が入り込む孔(図示省略)があけられており、ロックピン101は、通常、このオートリフトアーム90の孔に入り込んでいる。さらに、バックリフトアーム95は、位置決めローラ105と連結している。このため、ロックピン101がオートリフトアーム90の孔に入り込んだ状態では、オートリフトアーム90とバックリフトアーム95と位置決めローラ105とは、一体で移動可能になっている。また、オートリフトアーム90は、支持軸100や位置決めローラ105の軸方向に移動可能になっており、このため、任意で、ロックピン101から外すことができる。
【0054】
上記の構成により、変速レバー35を後進操作した際に苗植付部40を自動上昇させるバックリフト、及びハンドル31を旋回操作した際に苗植付部40を自動上昇させるオートリフトを作動させない状態を選択することができるので、作業者は任意のタイミングで苗植付部40の上昇や下降等の操作を行える。この設定のときは、特に旋回時の操作が増えてしまい操作性は低下するが、苗植付部40を自動的に昇降させたのでは植付位置が合わせられない条件下では植付位置を揃えることができるので、苗の植付精度が向上する。また、ロックピン101からオートリフトアーム90を外すことにより、物理的にバックリフト及びオートリフトを作動させない構成となるので、電子制御のように制御装置の誤作動でバックリフトやオートリフトが作動してしまうことを防止できる。
【0055】
また、バックリフト入切レバー96は、位置決めローラ105に対して回動可能に連結されている。また、バックリフト入切レバー96には、縦長部分と横長部分とを有することにより、逆L字状に形成された切欠き孔97があけられている。この切欠き孔97には、支持軸100と同じ向きに延在するバー107の先端が挿入されている。このバー107は、後述するように、変速レバー35が後進に設定された際に、下降するように構成されている。
【0056】
このため、変速レバー35が後進に設定された際に、バー107が切欠き孔97の横長部分に位置している場合は、バー107が下方向に移動することにより、バックリフト入切レバー96はバー107に押されて下方に移動する。この場合、当該バックリフト入切レバー96と連結している位置決めローラ105も、下方に移動することとなる。これに対し、バー107が切欠き孔97の縦長部分に位置している場合は、バー107が下方向に移動しても、バー107は切欠き孔97内を移動するに留まる。このため、バー107からバックリフト入切レバー96に対して押し下げる力は働かないため、位置決めローラ105も下方には移動しない。
【0057】
さらに、バックリフト入切レバー96は、位置決めローラ105に対して回動可能に連結されているため、作業者がバックリフト入切レバー96を手で回動し、切欠き孔97に対するバー107の位置を適宜決めることにより、変速レバー35を後進にした際に、バックリフト入切レバー96と位置決めローラ105とを自動的に下方へ押し下げるモードと、押し下げないモードを、任意で選択できるようになっている。
【0058】
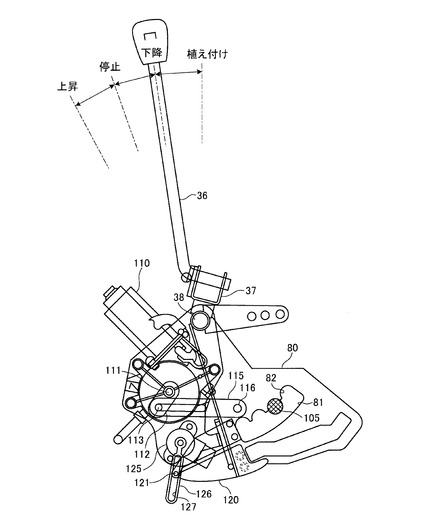
図8は、植付昇降レバーと切替カムとの関係を示す説明図である。植付昇降レバー36は、下端がブラケット37と連結軸38とを介して、切替カム80に連結されている。即ち、連結軸38が切替カム80の上端付近に形成された連結孔87に嵌り込むことにより、植付昇降レバー36と切替カム80とは連結している。これにより、切替カム80は、植付昇降レバー36の操作時は、連結軸38を中心として、植付昇降レバー36と共に回動する。また、切替カム80には、スプリング(図示省略)によって、オートリフトアーム90におけるケーブル接続部91側の方向(図6の矢印F方向)の付勢力が、常時付与されている。
【0059】
また、植付昇降レバー36は、苗植付部40の複数の作動状態を切り替えることができ、具体的には、「上昇」、「停止」、「下降」、「植え付け」の各モードを切替え設定できるようになっている。植付昇降レバー36を操作することにより設定するこれらのモードは、それぞれ切替カム80の上昇位置83、停止位置84、下降位置85、植付け位置86に対応している。
【0060】
即ち、位置決めローラ105は、通常、4つの位置決め部82のいずれかに嵌められた状態になるが、作業者が植付昇降レバー36を「上昇」の位置の設定した場合には、連結軸38を中心として植付昇降レバー36と共に回動する切替カム80は、植付け位置86の方向に回動する。これにより、位置決めローラ105は、位置決め孔81を相対的に移動し、位置決め部82の上昇位置83に収まる。同様に、植付昇降レバー36を「停止」の位置の設定した場合には、位置決めローラ105は、位置決め部82の停止位置84に収まり、植付昇降レバー36を「下降」の位置の設定した場合には、位置決めローラ105は、位置決め部82の下降位置85に収まり、植付昇降レバー36を「植え付け」の位置の設定した場合には、位置決めローラ105は、位置決め部82の植付け位置86に収まる。
【0061】
また、連結軸38を中心として回動する切替カム80は、ワイヤーやロッド、アーム等を介して、苗植付部上昇機構50の油圧昇降シリンダ54への油路を切り替える切替バルブ(図示省略)に連動している。このため、連結軸38を中心とする切替カム80の角度に応じて、苗植付部40の上昇、停止、下降、植え付けが、それぞれ制御される。即ち、切替カム80は、植付昇降レバー36と連動して回動することにより、苗植付部40の動作状態を切り替え可能になっている。
【0062】
また、切替カム80の近傍には、カム用モータ110が配設されている。このカム用モータ110は、走行車体2が圃場の端に達して旋回走行に移り、旋回に伴って後輪5が回転する際、その後輪5が所定数回転した時点で苗植付部40を自動的に下降させるための手段になっている。具体的には、カム用モータ110の駆動時に回動する作動軸111には、モータアーム112が固定されており、モータアーム112の先端にはモータ側ピン113が立設している。
【0063】
他方、切替カム80には、上昇位置83付近にピン孔88が形成されており、切替カム80にも、このピン孔88にカム側ピン116が嵌り込むことにより、カム側ピン116が立設されている。さらに、このカム側ピン116には、植え付けアーム115が連結しており、植え付けアーム115には、長孔が開設されている。この長孔には、モータ側ピン113が入り込み、摺動可能に嵌め合わされている。
【0064】
また、切替カム80の下方には、切替カム80の位置を検出するために、三角形状のプレート120が固定されており、プレート120の頂点には、プレートピン121が立設されている。また、プレート120の近傍で、且つ、カム用モータ110の下方には、ポテンショメータ125が配設されており、このポテンショメータ125は、長孔127が開設されたメータアーム126が、当該ポテンショメータ125の軸に固定されている。ポテンショメータ125は、メータアーム126の角度を検出可能になっており、メータアーム126の長孔127には、プレートピン121が摺動可能に嵌め合わされている。
【0065】
このため、切替カム80が回動した場合には、プレートピン121とポテンショメータ125との相対的な位置関係が変化するため、メータアーム126が回動し、ポテンショメータ125は、このメータアーム126の回動により、切替カム80の回動状態を検出できる。
【0066】
上記の構成により、ハンドル31を旋回終了方向に操作すると、カム用モータ110が作動して切替カム80を回動させて下降位置85に切り替えるので、苗植付部40を自動的に下降させることができる。さらにハンドル31を操作すると、カム用モータ110が作動して切替カム80を回動させて植付位置86に切り替えるので、苗植付部40が下降し切ると共に直進走行を開始した位置で、植付装置41による苗の植え付けを自動的に開始することができる。これにより、旋回終了時に苗植付部40の下降操作や植付装置41の作動操作を行う必要がなくなるため、操作性が向上すると共に、作業者は旋回操作に集中することができるので、植付開始位置を隣接条の植付終了位置に合わせやすくなるため、苗の植付精度が向上する。
【0067】
また、ポテンショメータ125に設けたメータアーム126が切替カム80の回動状態を検出し、この検出結果に基づいてカム用モータ110の作動を切り替えることにより、苗植付部40の下降中にカム用モータ110が作動し過ぎて植付装置41を作動させてしまうことが防止されるので、空中で植付装置41が苗を掻き取ることがなく、苗の無駄を減少さえることができる。
【0068】
図9は、上昇検知センサの設置状態の説明図である。図10は、畦クラッチレバーの説明図である。苗植付部上昇機構50の油圧昇降シリンダ54には、苗植付部40の所定高さよりも上方への上昇を検知する上昇検知手段である上昇検知センサ142が備えられている。また、苗植付部40には、例えば2条等、所定数の植付装置41への駆動力の伝達と遮断とを切り替える部分条クラッチである畦クラッチ140と、畦クラッチ140を操作する部分条クラッチレバーである畦クラッチレバー141と、が備えられている。畦クラッチ140は、この畦クラッチレバー141によって、所定数の植付装置41を作動させる状態である「入状態」と、植付装置41を作動させない「切状態」とを切り替えることができる。なお、上記畦クラッチレバー141を「切状態」とすると、2条分の植付装置41が停止状態となる構成が苗移植機においては一般的である。
【0069】
さらに、本実施形態に係る苗移植機1は、上昇検知センサ142が苗植付部40の上昇を検知すると作動する駆動モータ145を有しており、駆動モータ145の出力軸には、切替アーム146が連結されている。通常、畦クラッチ140は、苗植付部40を上げた時は自動で切れるようになっており、苗植付部40を再び下げて植え付け作業を再開する際には、手動で操作をすることにより、畦クラッチ140を入状態にする。駆動モータ145は、苗植付部40の上昇を検知したら、停止した植付装置41を所定の時間の経過後に自動的に作動させることができるように設けられている。
【0070】
即ち、駆動モータ145は、切替アーム146と畦クラッチレバー141とが、クラッチレバー連繋手段であるクラッチレバー用ケーブル147で連結されることにより、当該駆動モータ145の駆動力によって畦クラッチ140の状態を切り替えることが可能になっている。詳しくは、クラッチレバー用ケーブル147は、駆動モータ145の作動時には、畦クラッチ140が駆動力を伝達する方向に、駆動モータ145の作動時の出力を、切替アーム146を介して畦クラッチレバー141に伝達することが可能になっている。
【0071】
上記の構成により、畦クラッチ140を「切状態」で作業した後、旋回時に苗植付部40が上昇すると全ての畦クラッチ140を「入状態」に切り替えるため、畦クラッチレバー141を操作した次の条で植付作業をする際に、畦クラッチレバー141を操作し忘れて一部の畦クラッチ140が「切状態」のまま植付作業が開始されることを防止できるので、苗の植え付け忘れが防止され、作業者が手作業で苗を植え付ける必要が無く、作業能率の向上と作業者の労力の軽減が図られる。
【0072】
なお、ハンドル31にポテンショメータを設け、このポテンショメータが検出するハンドル31の操舵角度が所定角度(例:120度〜180度)以上になると駆動モータ145が作動する構成とすると、一部の条の畦クラッチ140を「切状態」で作業した次の作業条で確実に全ての畦クラッチ140が「入状態」となるため、植え付け忘れがより確実に防止される。
【0073】
図11は、植付深さ調整レバーの説明図である。苗植付部40は、フロート47の高さを調節することにより、植付深さを調節可能になっている。例えば、サイドフロート49の高さは、植付深さ調整レバー160によって調節する。植付深さ調整レバー160は、調整ガイド部161に長孔状の孔として開設された深さ調整ガイド162に、上下方向に挿通されている。この深さ調整ガイド162は、長さ方向が走行車体2の前後方向になって形成されているため、深さ調整ガイド162は、前後方向に移動させることが可能になっている。また、深さ調整ガイド162の内壁には、上下方向の延びる複数の溝部が形成されており、植付深さ調整レバー160は、深さ調整ガイド162内における任意の位置で保持することができる。
【0074】
サイドフロート49は、この植付深さ調整レバー160の下端部に連結されており、植付深さ調整レバー160を深さ調整ガイド162に沿って移動させた場合には、サイドフロート49も前後方向に位置が変化する。この変化の方向は、植付深さ調整レバー160とサイドフロート49とで反対方向になっており、植付深さ調整レバー160を前方に移動させた場合には、サイドフロート49は後方に移動し、植付深さ調整レバー160を後方に移動させた場合には、サイドフロート49は前方に移動する。ここで、サイドフロート49は、前後方向に位置が変化する際には、その変化と共に上下方向の位置も変化するように植付深さ調整レバー160に連結されている。このため、サイドフロート49の高さを調節する際には、任意の高さになるように、植付深さ調整レバー160を深さ調整ガイド162に沿って移動させることによって調節する。
【0075】
また、深さ調整ガイド162には、後方側の端部にフロート収納溝163が連通している。即ち、深さ調整ガイド162とフロート収納溝163とは、1つの長孔状に形成されている。フロート収納溝163は、深さ調整ガイド162よりも後方側に位置しており、植付深さ調整レバー160は、このフロート収納溝163にも入り込ませることができる。植付深さ調整レバー160をフロート収納溝163にも入り込ませた場合には、植付深さ調整レバー160は、通常の使用時よりも前方に位置することになる。このため、植付深さ調整レバー160をフロート収納溝163にも入り込ませた場合には、サイドフロート49は、通常の使用時よりも前方に位置する状態になる。
【0076】
上記の構成により、苗移植機を軽トラックの荷台等に積載する際、サイドフロート49を前方に移動させることができるので、苗移植機を荷台の幅内に収めることができるので、苗移植機の搬送を行う際に特別な届出が不要となり、搬送作業能率が大幅に向上する。また、苗植付部40を下降させると調節レバー49が調整ガイド部161の長孔に沿って「浅」側に移動するので、サイドフロート49が上方に移動するため、苗植付部40を急速に下げた際にサイドフロート49が地面に接触しにくくなり、サイドフロート49の破損が防止される。
【0077】
本実施形態に係る苗移植機1は、以上のごとき構成からなり、以下、その作用について説明する。苗移植機1の運転時は、エンジン10で発生する動力によって、走行車体2の走行と、苗載せ部45に載せた苗の植え付け作業を行う。このうち、植え付け作業は、回転軸が左右方向になる向きで植付装置41全体が回転しながら、植付爪42も回転することにより、苗載せ部45に載せられた苗を徐々に圃場に植え付ける。植え付け作業時は、このように植付装置41を作動させながら圃場内を走行車体2で走行することにより、複数の列状に苗を植え付ける。
【0078】
このため、植え付け作業時は、苗移植機1を運転する作業者は、変速レバー35を前進に切り替え、苗植付部40を下降させた状態で作業を行う。この作業状態では、植付昇降レバー36は「下降」の位置に設定する(図8参照)。従って、植付昇降レバー36に連結されている切替カム80は、位置決めローラ105が位置決め部82の下降位置85に入った状態になる。
【0079】
走行車体2が圃場の端に到達すると、作業者はハンドル31を回動させることにより、走行車体2を旋回させる。ハンドル31の回動させた場合、この回動に伴ってステアリングアーム60が操舵シャフト32を中心として回動する。これにより、ステアリングアーム60のタイロッド連結部61に連結されている2本のタイロッドが移動し、それぞれのタイロッドが取り付けられている、左右の前輪ファイナルケース21のナックルアームが回動する。これにより、前輪4は回動するため、走行車体2は旋回を開始する。
【0080】
このとき、ステアリングアーム60の回動に伴って、ステアリングアーム60に取り付けられている取付ピン66は、操舵シャフト32を中心として回動しつつ、オートリフト作動アーム70のスプリング側連結部71から離れる方向に移動する。この取付ピン66とスプリング側連結部71とは、連結スプリング75によって連結しているため、取付ピン66がスプリング側連結部71から離れる方向に移動した場合には、スプリング側連結部71には、連結スプリング75の引張り力によって、取付ピン66の方向に向わせる力が作用する。
【0081】
スプリング側連結部71は、オートリフト作動アーム70の回動軸72を中心として回動可能になっているため、スプリング側連結部71に取付ピン66の方向に向わせる力が作用した場合には、スプリング側連結部71は、回動軸72を中心として回動することにより、取付ピン66の方向に移動する。また、オートリフト作動アーム70は、回動軸72を中心として全体が回動可能になっているため、スプリング側連結部71が、連結スプリング75の引張り力によって、取付ピン66の方向に移動した場合には、オートリフト作動アーム70全体が、回動軸72を中心として回動する。
【0082】
この場合、ケーブル側連結部73は、当該ケーブル側連結部73に連結されているアーム用ケーブル77を引っ張る方向に移動する。このため、アーム用ケーブル77の他端側が接続されているオートリフトアーム90は、ケーブル接続部91側の部分に、アーム用ケーブル77からの引張り力が作用する。これにより、オートリフトアーム90は、ケーブル接続部91側の部分が、アーム用ケーブル77の引張り力の方向である下方側に移動する。
【0083】
ここで、オートリフトアーム90は、自動切り替えモードの状態になっていたとする。即ち、オートリフトアーム90の孔に、バックリフトアーム95のロックピン101が入り込んでいたとする。この場合、オートリフトアーム90が下方に移動すると、ロックピン101を介して、バックリフトアーム95も下方に移動し、バックリフトアーム95に連結されている位置決めローラ105も下方に移動する。これにより、位置決めローラ105は、切替カム80の位置決め部82から外れる。
【0084】
他方、切替カム80には、スプリングによって付勢力が常時付与されているので(図6、矢印F方向)、位置決めローラ105が位置決め部82から外れると、切替カム80は、位置決めローラ105によって移動が規制されなくなるため、連結軸38を中心として、一気に付勢力の方向に回動する。これにより、切替カム80と一体となって回動する植付昇降レバー36も切替カム80と共に回動し、「上昇」の位置まで移動する。従って、苗植付部上昇機構50の油圧昇降シリンダ54への油路を切り替える切替バルブが「上昇」側へ切り替わり、苗植付部40は上方へ移動する。このように、作業者が圃場の端でハンドル31を回動させると、苗植付部40は自動的に上昇する。また、オートリフトアーム90は、オートリフト作動アーム70の作動に連動して切替カム80を苗植付部40の上昇状態に回動させる上昇アームとして設けられている。
【0085】
なお、作業者がオートリフトアーム90を手動で移動させることにより、オートリフトアーム90の孔からバックリフトアーム95のロックピン101を外した場合には、ハンドル31を回動させることによりオートリフトアーム90が下方に移動した場合でも、バックリフトアーム95は下方には移動しない。この場合、位置決めローラ105も下方には移動せず、切替カム80の位置決め部82からは外れないため、切替カム80は回動しない。従って、旋回操作時に苗植付部40の昇降状態は変化しないため、作業者は苗植付部40の昇降のタイミングを自分で計って行うことができる。これにより、旋回時の操作が煩雑になり操作性は低下するが、圃場条件や植付作業条件に沿った苗の植え付けが可能となる。
【0086】
また、走行車体2を旋回させるために、ハンドル31を回動させた場合、これらのように、ステアリングアーム60の回動に伴う連結スプリング75の引張り力がオートリフト作動アーム70に作用することにより、オートリフト作動アーム70が回動し、苗植付部40の自動上昇が行われるが、連結スプリング75は、弾力性と伸縮性とを有している。このため、ハンドル31を大きく回動させることにより、ステアリングアーム60が大きく回動し、オートリフト作動アーム70も大きく回動した際に、オートリフト作動アーム70には、オートリフトアーム90側からの抵抗によって、アーム用ケーブル77からの引張り力が大きくなって作用する場合がある。
【0087】
この場合、連結スプリング75の引張り力に対するオートリフト作動アーム70の抵抗が大きくなるため、取付ピン66がオートリフト作動アーム70から離れる方向への回動を継続した際に、連結スプリング75は伸縮性によって全長が伸びる。これにより、ステアリングアーム60は、オートリフト作動アーム70がそれ以上取付ピン66の方向に近付かなくても大きく回動することができるので、メカロックを発生させることなくステアリングアーム60を回動させることが可能になり、苗植付部40の上昇タイミングが速くなるので、苗の押し倒しが防止されて苗の生育が良好になる。
【0088】
図12〜図14は、カム用モータによって切替カムを回動させる場合の説明図である。オートリフトアーム90が、自動切り替えモードの状態になっている場合には、走行車体2の旋回に伴って苗植付部40は自動的に上昇するが、さらに走行車体2を旋回させていった場合、苗植付部40は自動的に下降する。即ち、苗移植機1には、当該苗移植機1に搭載されるセンサ類などの電子機器を制御する電子制御装置であるコントローラ200(図16参照)が搭載されており、後輪ギヤケース22には、後輪5の回転速度を検出することにより、走行車体2の車速を検出する車速センサ171(図16参照)が設けられている。
【0089】
コントローラ200は、カム用モータ110も制御可能になっているため、車速センサ171で検出した回転速度が、予め設定されている回転速度に達すると、カム用モータ110に駆動信号を出力する。カム用モータ110は、この駆動信号を受けて、切替カム80を移動させる。即ち、旋回中は苗植付部40は上昇位置に位置しているので、植付昇降レバー36は「上昇」位置にあり、位置決めローラ105は、上昇位置83に入った状態になっている。このため、コントローラ200は、カム用モータ110を、切替カム80が位置決め部82の上昇位置83が位置する方向に回動する方向に駆動させる。
【0090】
即ち、コントローラ200は、モータアーム112のモータ側ピン113が、切替カム80から離れる方向にカム用モータ110が駆動させる。これにより、カム側ピン116によって切替カム80に連結している植え付けアーム115が、切替カム80から離れる方向に引っ張られるため、切替カム80も、この力によって回動する。
【0091】
なお、位置決め部82に入り込んでいる位置決めローラ105は、スプリングの付勢力によって上方に付勢されているが、カム用モータ110の駆動力によって、切替カム80が強制的に回動する場合には、位置決めローラ105は、位置決め部82を順次乗り越えていく。このため、上昇位置83にあった位置決めローラ105は、停止位置84(図12)から下降位置85(図13)に移動する。つまり、切替カム80と植付昇降レバー36は、位置決めローラ105が下降位置85に位置するまで回動する。これにより、苗植付部40は下降する。また、このようにカム用モータ110を駆動させることにより切替カム80を回動させる場合、ポテンショメータ125によって切替カム80の状態を検出しながら、適切な角度になるように回動させる。
【0092】
さらに、コントローラ200は、カム用モータ110を駆動させることにより、位置決めローラ105が植付け位置86(図14)に位置するまで、切替カム80と植付昇降レバー36とを回動させる。これにより、苗植付部40の植付装置41は作動を開始し、苗の植え付けを再開する。
【0093】
図15は、変速レバーを後進に切り替える場合の説明図である。変速レバー35を後進に切り替えた場合、バックリフト入切レバー96の切欠き孔97に挿入されているバー107は、両端が変速レバー35とバー107とに接続されている変速レバーケーブル108に引っ張られて、下方に移動する。この場合において、バー107が切欠き孔97の縦長部分に位置するようにバックリフト入切レバー96が設定されている場合、バー107は、切欠き孔97の縦長部分を移動するに留まる。この場合、バー107は、バックリフト入切レバー96に対して何の作用も及ぼさず、切替カム80も、それまでの状態を維持する。
【0094】
これに対し、バー107が切欠き孔97の横長部分に位置するようにバックリフト入切レバー96が設定されている場合に、バー107が下方に移動すると、バー107は横長部分の下側縁に当接する。これにより、バー107はバックリフト入切レバー96を押し下げるため、バックリフト入切レバー96に連結されている位置決めローラ105も、下方に移動する。この場合、位置決めローラ105は、切替カム80の位置決め部82から外れる。
【0095】
従って、オートリフトアーム90が自動切り替えモードの状態におけるハンドル31の回動時と同様に、切替カム80と植付昇降レバー36とは、スプリングによる付勢力の方向に、連結軸38を中心として一気に回動し、「上昇」の位置まで移動する。これにより、苗植付部上昇機構50の油圧昇降シリンダ54への油路を切り替える切替バルブが「上昇」側へ切り替わり、苗植付部40は上方へ移動する。このように、バー107が切欠き孔97の横長部分に位置するようにバックリフト入切レバー96が設定されている状態で、変速レバー35を後進に切り替えると、苗植付部40は自動的に上昇する。
【0096】
図16は、報知装置の説明図である。また、本実施形態に係る苗移植機1は、植付装置41が圃場の土中に入り込んだ状態で停止しているとみなして作業者に報知する報知手段である報知装置172を備えている。即ち、ハンドル31の近傍には、ハンドル31の操舵を検知する操舵検知部材であるハンドルポテンショメータ170が配設されており、後輪ギヤケース22には、走行車体2の走行速度及び進行方向を検出する走行検出手段である車速センサ171が配設されている。これらのハンドルポテンショメータ170と車速センサ171とは、共にコントローラ200に接続されており、報知装置172も、コントローラ200に接続されている。この報知装置172としては、例えばブザーが挙げられる。
【0097】
コントローラ200は、ハンドルポテンショメータ170や車速センサ171等から情報が逐次伝達されており、植付装置41が圃場の土中に入り込んだ状態で停止しているとみなした場合には、報知装置172であるブザーを鳴らす。この場合における判断は、例えば、植付装置41が停止した状態で、且つ、ハンドルポテンショメータ170がハンドル31の操舵を検知すると共に、車速センサ171が走行車体2の後進を検出した場合に、植付装置41が圃場の土中に入り込んだ状態で停止しているとみなす。つまり、後進時に植付装置41を停止させると、圃場の土の中に植付爪42が入った状態で止まり易い。このため、苗植付部40を下げた状態で後進した場合には、植付装置41が圃場の土中に入り込んでいるとみなして、作業者に報知する。
【0098】
上記の構成により、圃場の四隅で植付作業を行う場合等、直角(90度)旋回をする際に、次の直進位置に移動する際に圃場面を均すべく苗植付部40を下降させて後進する際に植付装置41に泥土が付着していても、作業者は植付走行開始前に植付装置41に泥土が付着しているかどうか、即ち、苗を掻き取る爪(フォーク)の間に泥土が詰まっていないかどうかを忘れずに確認することができるので、植付装置41が苗を取れず苗を植え付け損なうことが防止されるため、作業能率が向上するとともに、作業者が苗を手作業で植える必要が無く、作業者の労力が軽減される。
【0099】
また、一部の植付装置41で植え付け作業を行う場合には、畦クラッチ140を「入」の状態にして作業を行う。これにより、所定の一部の植付装置41のみで植え付け作業を行う。この場合でも、ハンドル31を操舵することによる旋回時は、自動的に苗植付部40が上昇するが、苗植付部40が上昇すると、畦クラッチ140を「切」の状態になる。このため、コントローラ200は、畦クラッチ140が「入」の状態で、上昇検知センサ142によって苗植付部40が上昇したことを検知した場合には、所定時間の経過後、例えば、上昇してから1秒後に、駆動モータ145を作動させる。これにより、クラッチレバー用ケーブル147によって駆動モータ145の駆動力が伝達される畦クラッチレバー141は、畦クラッチ140が「入」の状態になる。これにより、旋回を終了して植え付け作業を再開する際に、自動的に植え付け作業が行われる。
【0100】
また、苗移植機1の運搬等を行う場合には、植付深さ調整レバー160をフロート収納溝163に位置させる。これにより、サイドフロート49は、通常の使用時よりも前方に位置した状態になるため、苗移植機1の全長が短くなり、運搬を行い易くなる。
【0101】
以上の苗移植機1は、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、ステアリングアーム60とを、連結スプリング75で連結しているため、旋回初期では、ステアリングアーム60の回動を効果的にオートリフト作動アーム70に伝達することができる。これにより、旋回初期から苗植付部40を上昇させることができる。また、ステアリングアーム60を大きく回動させた場合には、連結スプリング75が伸びることにより、オートリフト作動アーム70の抵抗が大きくなった場合でも、必要以上にオートリフト作動アーム70を回動させることなく、ステアリングアーム60のみで自由に回動させることができる。これらの結果、メカロックを発生させることなく、旋回時により確実に苗植付部40を上昇させることができる。
【0102】
また、旋回時における苗植付部40の上昇が早くなるため、苗の押し倒しを防止することができる。さらに、メカロックを防止できるため、作業の中断が無くなり、作業効率を上場させることができる。
【0103】
また、植付昇降レバー36と連動する切替カム80を設け、オートリフト作動アーム70の作動時には、アーム用ケーブル77とオートリフトアーム90とによって切替カム80を回動さている。これにより、高価な電子部品を用いることなく、より確実に、ステアリングアーム60の回動に連動して苗植付部40を上昇させることができる。この結果、製造コストの上昇を抑えつつ、旋回時により確実に苗植付部40を上昇させることができる。
【0104】
また、連結スプリング75は、フロントフレーム8の後方側でステアリングアーム60とオートリフト作動アーム70とを連結しているため、圃場の泥土が連結スプリング75やオートリフト作動アーム70に付着し難くなる。これにより、泥土によって動作がロックされることを防止できる。また、泥土を取り除く作業が不要になり、メンテナンス性を向上させることができる。
【0105】
また、取付ピン66が、ステアリングアーム60の前側にあるため、ステアリングアーム60の回動量が少なくても、連結スプリング75が伸びる量を増加させることができる。これにより、苗植付部40を上昇させるタイミングが早くなるため、より確実に苗の押し倒しを防止することができる。また、取付ピン66は、ハンドル31が直進状態にあるときに、機体左右方向の中央部に位置しているため、左右どちらに旋回する場合でも、苗植付部40の上昇タイミングを同じタイミングにすることができ、操作性を向上させることができる。
【0106】
また、所定の条件のときに、報知装置172を作動させるため、植付装置41が苗を取れなくなることを防止できる。例えば、圃場の端など旋回途中で後進する必要がある場合、植付装置41の停止位置が土中に入り込む位置になり、このまま後進すると苗植付部40が自動上昇する際に、植付装置41に土が付着することがある。この場合、植付装置41で苗を取れなくなってしまうことがあるが、旋回途中で後進するときに、報知装置172を作動させることにより、植付装置41に土が付着することを作業者に知らせることができる。従って、苗植付部40が上昇してから後進することができ、植付装置41が苗を取れなくなることを防止できる。
【0107】
また、苗植付部40を上昇さえると、自動的に畦クラッチ140が「入」側に操作されることにより、畦クラッチ140を「切」にして作業した次の工程で畦クラッチ140を「入」にし忘れることを防止できる。従って、苗が植え付けられない区間の発生を防止でき、作業者が手作業で植え付ける作業を不要にすることができる。また、駆動モータ145は、畦クラッチ140を「入」側にする場合にのみ作動し、負荷が小さいため、耐久性を向上させることができる。
【0108】
図17は、実施形態に係る苗移植機の変形例であり、作溝器の斜視図である。図18は、図17に示す作溝器の断面図である。なお、施肥装置150では、肥料は作溝器156から撒くが、肥料の出口である作溝器156は、出口は泥等が入ったり、肥料が水に濡れて固まったりして詰まり易くなっている。このため、作溝器156は、詰まりを除去する構造にしてもよい。例えば、図17、図18に示すように、作溝器156には、回動軸213を中心として回動する除去プレート212を設けてもよい。この除去プレート212は、開閉ワイヤー214によって回動することができ、通常時は作溝器156の側壁の一部として構成される。また、作溝器156内に堆積物があると判断された場合には、開閉ワイヤー214を引っ張ることにより、回動軸213を中心として除去プレート212を回動させ、作溝器156内の堆積物216を、除去プレート212によって作溝器開口部211から押し出す。この除去プレート212の開閉は、作業者が任意で行ってもよく、または、作溝器156にセンサを設け、堆積物216が溜まったことを検知したら、モータによって自動的に開閉させることにより、堆積物216を押し出してもよい。これにより、より確実に肥料を撒くことができ、苗の生育を促進させることができる。
【0109】
図19は、実施形態に係る苗移植機の変形例であり、苗補給時ステップの概略図である。また、植え付け作業中に、苗載せ部45に載置している苗が無くなった場合には、予備苗載台130の苗を苗載せ部45に移すため、作業者は一旦苗移植機1から降りる必要がある。この場合、圃場は足場が悪く、作業性が悪いため、苗を移す際の足場を設けてもよい。例えば、図19に示すように、走行車体2の予備苗載台130の近傍における前方から側方にかけて、苗補給時ステップ220を設けてもよい。これにより、苗載せ部45に苗を補給するために予備苗載台130から苗を取る際には、苗補給時ステップ220に足をかけて、または、苗補給時ステップ220に乗って苗を取ることができるので、補給作業を容易に行うことができる。
【0110】
図20は、実施形態に係る苗移植機の変形例であり、油圧昇降シリンダの概略図である。また、苗植付部40の昇降は、油圧昇降シリンダ54を伸縮させることにより行うが、油圧昇降シリンダ54の作動時には、バランススプリング230とスプリングカバー231とが干渉することにより、異音が発生する場合がある。このため、この異音を除去する部材を設けてもよい。例えば、図20に示すように、スプリングカバー231の下部に、油を含む樹脂部材である含油部材232を配設してもよい。これにより、給油を容易に行うことができるため、異音の発生を抑えることができる。
【0111】
また、苗植付部40は、圃場のみでなく、路上を走行する場合があるが、路上走行は、圃場での走行よりも走行抵抗が小さいため、小さな駆動力で走行することができる。このため、副変速レバーの「植付速」と「走行速」とで変速比を異ならせ、路上走行時は植え付け作業時と比較してエンジン回転数が低くなるようにしてもよい。これにより、燃費の向上を図ることができる。
【0112】
また、操縦席28は、通常前後方向の位置を調節可能になっており、これにより、作業者の体格の違いをカバーしているが、操縦席28は、単に前後方向にスライドするのみでなく、後方に向かうに従って、上方にも移動するようになっているのが好ましい。即ち、体が大きい作業者は、体が小さい作業者と比較して足の長さも長いため、操縦席28を、後方に向うに従って位置が高くなるようにすることにより、より確実に、どんな体格の作業者でも、快適に作業を行うことを可能にすることができる。
【0113】
また、実施形態に係る苗移植機1では、連結スプリング75は2本が用いられているが、連結スプリング75は1本でもよい。また、実施形態に係る苗移植機1では、伸縮部材として連結スプリング75が用いられているが、伸縮部材は、スプリング以外のものでもよく、例えば、伸縮可能なシリンダを用いてもよい。また、伸縮部材としてスプリングを用いる場合には、スプリングを覆うスプリングカバー75a(図5参照)を設けるのが好ましい。これにより、スプリングに泥等が付着したり、また、スプリングを複数用いる場合は、スプリングが撓んでスプリング同士が絡まったりすることを防止することができる。
【符号の説明】
【0114】
1 苗移植機
2 走行車体
4 前輪
5 後輪
7 メインフレーム
8 フロントフレーム
10 エンジン
21 前輪ファイナルケース
22 後輪ギヤケース
25 フロアステップ
31 ハンドル
32 操舵シャフト
35 変速レバー
36 植付昇降レバー
40 苗植付部
41 植付装置
47 フロート
50 苗植付部上昇機構
54 油圧昇降シリンダ
60 ステアリングアーム
66 取付ピン
70 オートリフト作動アーム
75 連結スプリング
77 アーム用ケーブル
80 切替カム
81 位置決め孔
82 位置決め部
90 オートリフトアーム
95 バックリフトアーム
96 バックリフト入切レバー
105 位置決めローラ
110 カム用モータ
120 プレート
125 ポテンショメータ
130 予備苗載台
【特許請求の範囲】
【請求項1】
走行車体に設けられて前記走行車体を操舵する操舵部材と、
前記走行車体の後部に配設されると共に、苗を圃場に植え付ける苗植付部と、
前記苗植付部の下部に位置し、前記苗植付部に載置した苗を前記圃場に植え付ける植付装置と、
前記苗植付部を上昇させる苗植付部上昇機構と、
前記操舵部材を操舵することにより回動する旋回連動アームと、
前記旋回連動アームの回動に連動し、前記苗植付部上昇機構を作動させることができる作動アームと、
伸縮性を有して前記旋回連動アームと前記作動アームとを連結することにより、双方の距離が変化可能な状態で前記旋回連動アームの回動を前記作動アームに伝達する伸縮部材と
を備えることを特徴とする苗移植機。
【請求項2】
前記苗植付部の動作状態を、少なくとも前記苗植付部上昇機構による上昇状態を含んで切り替えることができる植付昇降レバーと、
前記植付昇降レバーと連動して回動することにより、前記苗植付部の動作状態を切り替え可能な切替カムと、
前記作動アームの作動に連動して前記切替カムを前記苗植付部の上昇状態に回動させる上昇アームと、
前記上昇アームと前記作動アームとを連結して前記作動アームの動作を前記上昇アームに伝達するアーム連繋部材と
を備えることを特徴とする請求項1に記載の苗移植機。
【請求項3】
前記伸縮部材は、前記走行車体が有する前側フレームの後方側で前記旋回連動アームと前記作動アームとを連結することを特徴とする請求項1または2に記載の苗移植機。
【請求項4】
前記旋回連動アームには、前記旋回連動アームの回動支点よりも前側に前記伸縮部材を取り付ける取付部材が設けられており、
前記取付部材は、前記操舵部材が直進位置にあるときに、前記走行車体における機体左右方向の中央部に位置することを特徴とする請求項1から3のいずれか1項に記載の苗移植機。
【請求項5】
前記操舵部材の操舵を検知する操舵検知部材と、
前記走行車体の走行速度及び進行方向を検出する走行検出手段と、
前記植付装置が停止した状態であり、且つ、前記操舵検知部材が前記操舵部材の操舵を検知すると共に、前記走行検出手段が前記走行車体の後進を検出した場合には、前記植付装置が前記圃場の土中に入り込んだ状態で停止しているとみなして作業者に報知する報知手段と
を備えることを特徴とする請求項1から4のいずれか1項に記載の苗移植機。
【請求項6】
所定数の前記植付装置への駆動力の伝達と遮断とを切り替える部分条クラッチと、
前記部分条クラッチを操作する部分条クラッチレバーと、
前記苗植付部の上昇を検知する上昇検知手段と、
前記上昇検知手段が前記苗植付部の上昇を検知すると作動する駆動モータと、
前記駆動モータの出力軸に連結される切替アームと、
前記切替アームと前記部分条クラッチレバーとを連結すると共に、前記駆動モータの作動時には前記部分条クラッチが前記駆動力を伝達する方向に、前記駆動モータの作動時の出力を前記切替アームを介して前記部分条クラッチレバーに伝達するクラッチレバー連繋手段と
を備えることを特徴とする請求項1から5のいずれか1項に記載の苗移植機。
【請求項1】
走行車体に設けられて前記走行車体を操舵する操舵部材と、
前記走行車体の後部に配設されると共に、苗を圃場に植え付ける苗植付部と、
前記苗植付部の下部に位置し、前記苗植付部に載置した苗を前記圃場に植え付ける植付装置と、
前記苗植付部を上昇させる苗植付部上昇機構と、
前記操舵部材を操舵することにより回動する旋回連動アームと、
前記旋回連動アームの回動に連動し、前記苗植付部上昇機構を作動させることができる作動アームと、
伸縮性を有して前記旋回連動アームと前記作動アームとを連結することにより、双方の距離が変化可能な状態で前記旋回連動アームの回動を前記作動アームに伝達する伸縮部材と
を備えることを特徴とする苗移植機。
【請求項2】
前記苗植付部の動作状態を、少なくとも前記苗植付部上昇機構による上昇状態を含んで切り替えることができる植付昇降レバーと、
前記植付昇降レバーと連動して回動することにより、前記苗植付部の動作状態を切り替え可能な切替カムと、
前記作動アームの作動に連動して前記切替カムを前記苗植付部の上昇状態に回動させる上昇アームと、
前記上昇アームと前記作動アームとを連結して前記作動アームの動作を前記上昇アームに伝達するアーム連繋部材と
を備えることを特徴とする請求項1に記載の苗移植機。
【請求項3】
前記伸縮部材は、前記走行車体が有する前側フレームの後方側で前記旋回連動アームと前記作動アームとを連結することを特徴とする請求項1または2に記載の苗移植機。
【請求項4】
前記旋回連動アームには、前記旋回連動アームの回動支点よりも前側に前記伸縮部材を取り付ける取付部材が設けられており、
前記取付部材は、前記操舵部材が直進位置にあるときに、前記走行車体における機体左右方向の中央部に位置することを特徴とする請求項1から3のいずれか1項に記載の苗移植機。
【請求項5】
前記操舵部材の操舵を検知する操舵検知部材と、
前記走行車体の走行速度及び進行方向を検出する走行検出手段と、
前記植付装置が停止した状態であり、且つ、前記操舵検知部材が前記操舵部材の操舵を検知すると共に、前記走行検出手段が前記走行車体の後進を検出した場合には、前記植付装置が前記圃場の土中に入り込んだ状態で停止しているとみなして作業者に報知する報知手段と
を備えることを特徴とする請求項1から4のいずれか1項に記載の苗移植機。
【請求項6】
所定数の前記植付装置への駆動力の伝達と遮断とを切り替える部分条クラッチと、
前記部分条クラッチを操作する部分条クラッチレバーと、
前記苗植付部の上昇を検知する上昇検知手段と、
前記上昇検知手段が前記苗植付部の上昇を検知すると作動する駆動モータと、
前記駆動モータの出力軸に連結される切替アームと、
前記切替アームと前記部分条クラッチレバーとを連結すると共に、前記駆動モータの作動時には前記部分条クラッチが前記駆動力を伝達する方向に、前記駆動モータの作動時の出力を前記切替アームを介して前記部分条クラッチレバーに伝達するクラッチレバー連繋手段と
を備えることを特徴とする請求項1から5のいずれか1項に記載の苗移植機。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−66391(P2013−66391A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205368(P2011−205368)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]