
苗移植機
【課題】苗の補充作業等を行うときに、機体を走行させながら苗の補充を安全に行うことが、作業者の安全を確保できる苗移植機を提供すること。
【解決手段】
苗の補充作業の開始時と終了時に作業者が前記開始と終了のための手動操作する、もしくは作業者が苗の補充作業を開始したことや終了したことを自動検知する苗補充センサ57が苗補充の検知状態になると、エンジンサーボモータ47を作動させてエンジン20を低回転とする制御構成を備えた苗移植機であり、苗補充の際に停止する必要がないので作業能率が向上する。また減速段で走行することで苗の補充の際、圃場面に凹凸等があっても走行車体2の急激な揺れが発生しにくく作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性がより向上する。こうして、苗補充作業を行う操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【解決手段】
苗の補充作業の開始時と終了時に作業者が前記開始と終了のための手動操作する、もしくは作業者が苗の補充作業を開始したことや終了したことを自動検知する苗補充センサ57が苗補充の検知状態になると、エンジンサーボモータ47を作動させてエンジン20を低回転とする制御構成を備えた苗移植機であり、苗補充の際に停止する必要がないので作業能率が向上する。また減速段で走行することで苗の補充の際、圃場面に凹凸等があっても走行車体2の急激な揺れが発生しにくく作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性がより向上する。こうして、苗補充作業を行う操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、走行装置と苗植付装置などを備えた苗移植機に関する。
【背景技術】
【0002】
苗植付装置を機体後部に備えた苗移植機において、機体のステップ上に苗載せスペースを備えた苗移植機が知られている。
特許文献1記載の苗移植機では、植付装置に載置された苗の量が所定量未満になると、走行速度を減速させて苗の減少を報知すると共に苗植付装置への苗の補充作業への移行を行いやすくする機能が備えられている。
また、特許文献2記載の苗移植機では、苗の補充を行う際、作業者が操縦席から離れたことが検出されると、自動的にエンジンをアイドリング回転数に切り替えてその場に停止し、安全に苗の補充を行える機能が備えられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−207104号公報
【特許文献2】特開2011−050343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1記載の発明では、苗の補充作業を行う前から走行速度が減速し始めるため、作業者が苗の補充を行うまで低速作業が継続されてしまい、作業能率が低下する問題がある。
また、特許文献2記載の苗移植機では、操縦者とは別に苗の補充等を行う作業者が搭乗している場合、苗の補充作業の際には操縦者が走行停止操作を行わねばならず、補充作業時の自動停止機能が活用されない問題がある。
【0005】
特に、中国など、圃場面積が広い耕地で用いる多量の苗を機体上に載せておき、苗植付得作業を能率的に行えるように、車体上のスペースに載せられるだけの苗を載せて作業を行うケースがある。このため、操縦者と苗の補充作業者の2名で作業をすることが多く、苗の補充作業を速やかに行うために車両を完全に停止させないで、苗を積み込む作業を行うことができ、また圃場の凹凸等で機体が揺れても、作業者が転ぶことがなく、また植付装置に投入された苗の姿勢が乱れないようにすることが必要である。
そこで、本発明の課題は、苗の補充作業等を行うときに、機体を走行させながら苗の補充を安全に行うことが、作業者の安全を確保できる苗移植機を提供することである。
【課題を解決するための手段】
【0006】
上記課題は、下記構成によって達成される。
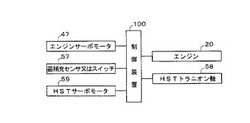
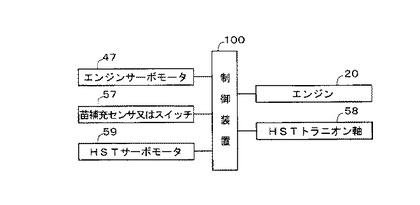
すなわち、請求項1に係る発明は、エンジン(20)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)に操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、エンジン(20)の回転数を変更する制御アクチュエータ(サーボモータ)(47)と、苗の補充作業の開始と苗補充の終了を検知する又は人間の苗補充の開始と終了時に人間が操作する苗補充検知装置(苗補充センサ又はスイッチ)(57)と、苗補充検知装置(57)が検知状態になるとエンジン制御アクチュエータ(エンジンサーボモータ)(47)を作動させてエンジン(20)の回転数を低回転とする制御構成を有する制御装置(100)を備えたことを特徴とする苗移植機である。
【0007】
請求項2に係る発明は、無段油圧式変速装置(HST)(23)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)の操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、HST(23)のトラニオン軸(58)の開度を変更するHST制御アクチュエータ(HSTサーボモータ)(59)と、苗の補充作業の開始を検知する苗補充検知装置(苗補充センサ又はスイッチ)(57)と、制御装置(100)は苗補充検知装置(57)が苗を検知する状態になると、HST制御アクチュエータ(HSTサーボモータ)(47)を作動させてトラニオン軸(58)の開度を減少させる制御構成を備えたことを特徴とする苗移植機である。
【0008】
請求項3に係る発明は、苗補充検知装置(57)が苗補充作業の終了を検知すると、制御装置(100)はエンジン制御アクチュエータ(エンジンサーボモータ)(47)を作動させて減速前の走行速度に復帰させる制御構成としたことを特徴とする請求項1または2記載の苗移植機である。
【0009】
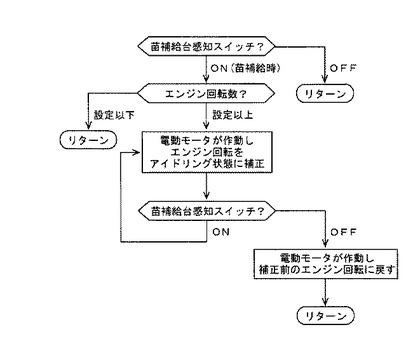
なお、苗補充検知装置57には、次のような(1)手動式と(2)自動式のものがある。 (1)手動式:苗補充検知装置57がスイッチ式の場合であれば、苗の補充作業を始める前に作業者が苗補充検知装置57を、開始操作をすると共に、苗の補充作業を終えるともう一度終了操作をする方式であり、この方式では誤検知が起きにくいが、開始時や終了時の操作忘れを生じることがある。
(2)自動式:苗補充検知装置57を苗載せ台51の上部の苗補充ガイド54aに設け、苗補充ガイド54aにマット苗が載るとその重量で「開始」を認識し、マット苗が苗載せ台51上に送り込まれて苗補充ガイド54a上を通過し終えると「終了」を認識することができる。この方式では入れ忘れや切り忘れは起きにくいが、苗補充ガイド54aに泥土などが付着して重量が増加すると、誤検知する可能性がある。
【0010】
ここで苗補充検知装置57の終了の認識は、該補充検知装置57が自動的に作動するスイッチ式である場合(自動式)は、作業者の操作により行い、植付部4の苗補充ガイド54a(苗載せ台51の頂部に設ける)に感圧センサを設ける場合は、感圧センサが非検知状態になった後、5〜10秒ほど経過した後である。前記感圧センサの場合、検知終了と同時に速度を復帰させると、次の苗の補充が始まった際にまた減速しなければならないので、インターバルを設ける。
ここまでの苗補充に関する制御ブロック図とフローチャートを図3,図4にそれぞれ示す。
【0011】
請求項4に係る発明は、操縦部(33)に操縦者が搭乗する操縦席(31)を設け、操縦座席(31)の後部で且つ後部作業ステップ(36)の前側に(門型の)支柱(60)を設け、該支柱(60)の上部で且つ操縦席(31)よりも上側位置に、弾性を有するクッション体(61)を設けたことを特徴とする請求項1から3の何れか1項に記載の苗移植機である。
【0012】
請求項5に係る発明は、クッション体(61)の内部に苗補充検知装置(57)を配置し、作業者がクッション体(61)に接触している間は苗補充検知装置(57)は非検知状態となり、作業者がクッション体(61)から所定時間(2〜5秒)以上離れると苗補充検知装置(57)は検知状態となることを特徴とする請求項4に記載の苗移植機である。
【0013】
請求項6に係る発明は、フェンス部材(6)にスライド体(62)を左右方向に摺動自在に配置し、該スライド体(62)に苗を載置して後方に案内する苗ガイドステー(64)を配置し、苗ガイドステー(64)の左右幅は、植付部(4)の一条分の幅とほぼ同じとしたことを特徴とする請求項1から5の何れか1項に記載の苗移植機である。
【0014】
たとえばフェンス部材6へのスライド体62の取り付けは、フェンス部材6の周りを一対の樹脂体で挟み込み、挟み込んだ樹脂体のU字状のパイプを貫通させて固定する。一対の樹脂体は円筒部材からなるフェンス部材6の外形を二分した凹部を備えた部材であり、前記一対の凹部を向かい合わせとなるように配置してフェンス部材6を挟み込む構成である。
【0015】
請求項7に係る発明は、苗ガイドステー(64)の後端部側に、苗補充ガイド(54a)に連結可能な連動ロッド(66)を装着したことを特徴とする請求項6に記載の苗移植機である。
【発明の効果】
【0016】
請求項1記載の発明によれば、苗補充検知装置(苗補充センサ又はスイッチ)57による検知で植付部4に苗の補充作業の開始が始まると、エンジン制御アクチュエータ(エンジンサーボモータ)47により走行車体2の走行速度が自動的に、例えば約1800rpm(アイドリング時の回転数に近い回転数)の減速段で走行することになるため、苗補充の際に停止する必要がなく、作業能率が従来技術より向上する。
【0017】
また、減速段で走行することで、苗の補充の際、圃場面に凹凸等があっても、走行車体2の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性が従来技術より向上する。
こうして、苗補充作業を行う操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0018】
請求項2記載の発明によれば、植付部4に苗を補充する作業を始めると、走行速度が自動的に減速されることにより苗補充の際に停止する必要がないので、作業能率が従来技術より向上する。また、苗の補充の際、圃場に凹凸等があっても、機体の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防止され、補充作業の安全性が従来技術より向上する。
さらに、補充作業を行う作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0019】
請求項3記載の発明によれば、請求項1,2記載の発明の効果に加えて、苗載せ台51への苗の補充が終わると元の走行速度に戻ることにより、作業者が苗移植機の走行速度を再度設定する必要がないので、苗移植機の操作性が従来技術より向上する。また、苗の補充前と補充後の走行速度がほぼ同じになることにより、苗の植付タイミングが変わることを防止できるので、苗の植付精度が従来技術より向上する。
【0020】
請求項4記載の発明によれば、請求項1から3のいずれかに記載の発明の効果に加えて、操縦席31の後部で且つ後部作業ステップ36の前側に配置する支柱60の上部にクッション体61を設けたことにより、後部作業ステップ36に搭乗する作業者はこのクッション体61を簡易作業座席として用いることができ、長時間の作業でも疲れにくくなり、作業者の労力が軽減される。
また、クッション体61の取付位置が操縦席31よりも上方であることにより、機体の操縦を行う作業者のヘッドレストとすることができるので、作業者は楽な姿勢で作業を行うことができ、労力が軽減される。
【0021】
請求項5記載の発明によれば、請求項4記載の発明の効果に加えて、クッション体61の内部に苗補充検知装置57を配置し、苗の補充を行う作業者がクッション体61から離れると、苗補充作業状態であることが自動的に検知される構成としたことにより、苗補充検知装置57が必要なときに検知状態となりやすく、誤検知が防止される。
また、作業者がクッション体61から離れて所定時間が経過した後に、苗補充検知装置57が苗補充を検知状態なるため、機体の揺れ等で一瞬離れた場合に苗補充作業状態となることを防止できる。
【0022】
請求項6記載の発明によれば、請求項1から5のいずれかに記載の発明の効果に加えて、フェンス部材6に沿って摺動可能なスライド体62に、苗ガイドステー64を設けたことにより、作業者はこの苗ガイドステー64に苗を載せて植付部4に苗を移動させることができるので、走行車体2から身を乗り出して苗の補充を行う必要がなく、苗補充作業の安全性が従来技術より向上する。また、スライド体62が左右方向に摺動自在であることにより、複数個所に苗を補充する場合でも、スライド体62の位置を合わせるだけでよいので、作業能率が従来技術より向上する。
【0023】
請求項7記載の発明によれば、請求項6記載の発明の効果に加えて、苗ガイドステー64と苗補充ガイド54aを連動ロッド66で繋ぐことにより、植付部の左右方向への移動に合わせてスライド体62が左右方向に移動するため、苗の補充作業位置がずれて苗の補充姿勢が乱れることを防止できるので、苗が正確に圃場に植え付けられるため、植付精度が従来技術より向上する。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施形態の乗用型田植機の側面図である。
【図2】図1の乗用型田植機の平面図である。
【図3】図1の乗用型田植機の苗補充に関する制御ブロック図である。
【図4】図1の乗用型田植機の苗補充に関する制御フローチャートである。
【図5】図1の乗用型田植機のフェンス部材にスライド体を左右方向に摺動自在に配置した場合の平面図である。
【図6】図1の乗用型田植機のフェンス部材にスライド体を左右方向に摺動自在に配置した場合の斜視図である。
【図7】図1の乗用型田植機の一実施例のレインバイザ部分の側面図(図7(a)と図7(b))である。
【図8】図1の乗用型田植機の一実施例の昇降リンク装置部分の側面図(図8(a)と図8(b))、昇降リンク装置部分の平面図(図8(c))である。
【発明を実施するための最良の形態】
【0025】
以下、図面に基づき、本発明の好ましい実施の形態について説明する。
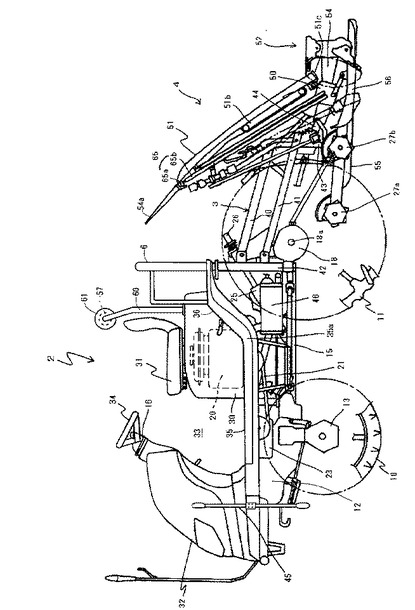
図1及び図2は本発明の苗移植機の典型例である乗用型田植機の側面図と平面図である。この乗用型田植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に図示していない施肥装置の本体部分を配置することもできる。搭乗オペレータが乗用型田植機の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向と後進方向をそれぞれ前、後という。
【0026】
走行車体2は、駆動輪である左右一対の前輪10,10及び左右一対の後輪(走行装置)11,11を備えた四輪駆動車両であって、機体の前部にミッションケース12が配置され、そのミッションケース12の左右側方に前輪ファイナルケース13,13が設けられ、該左右前輪ファイナルケース13,13の操向方向を変更可能な各々の前輪支持部から外向きに突出する左右前輪車軸に左右前輪10,10が各々取り付けられている。また、ミッションケース12の背面部にメインフレーム15の前端部が固着されており、そのメインフレーム15の後端左右中央部に前後水平に設けた後輪ローリング軸を支点にして後輪ギヤケース18,18がローリング自在に支持され、その後輪ギヤケース18,18から外向きに突出する後輪車軸に後輪11,11が取り付けられている。
【0027】
エンジン20はメインフレーム15の上に搭載されており、該エンジン20の回転動力が、ベルト伝動装置21及び油圧無段変速装置(HST)23を介してミッションケース12に伝達される。ミッションケース12に伝達された回転動力は、該ケース12内のトランスミッションにより変速された後、走行動力と外部取出動力に分離して取り出される。そして、走行動力は、一部が前輪ファイナルケース13,13に伝達されて前輪10,10を駆動すると共に、残りが後輪ギヤケース18,18に伝達されて後輪11,11を駆動する。また、外部取出動力は、走行車体2の後部に設けた植付クラッチケース25に伝達され、それから植付伝動軸26によって苗植付部4へ伝動される。
【0028】
エンジン20の上部はエンジンカバー30で覆われており、その上に座席31が設置されている。座席31の前方には各種操作機構を内蔵するフロントカバー32があり、その上方に前輪10,10を操向操作するハンドル34が設けられており、この領域を操縦部33とする。エンジンカバー30及びフロントカバー32の下端左右両側は水平状のフロアステップ35になっている。フロアステップ35は一部格子状になっており、該ステップ35を歩く作業者の靴についた泥が圃場に落下するようになっている。フロアステップ35上の後部は、後輪フェンダを兼ねるリヤステップ36となっている。
【0029】
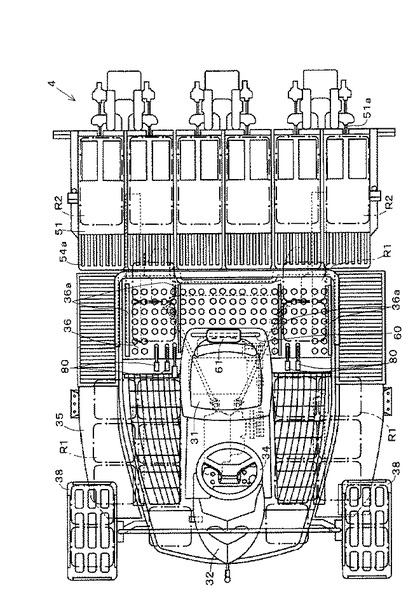
なお、図2の全体平面図に示すようにリヤステップ36には突起36aを設けているので、苗箱や、苗を何重にも巻いた巻き苗(ロール苗)Rをリヤステップ36に載置した後にスライド移動をし易い。さらに操縦席31の両側に2個ずつ配置した畦クラッチレバー80の外側のリヤステップ36には苗箱や巻き苗(ロール苗)R(R1、R2)を搭載できるスペースを設けているので、苗箱や巻き苗(ロール苗)Rが畦クラッチレバー80の操作性を邪魔しない。なお、図2には巻いた状態のロール苗R1と開いた状態のロール苗R2をフロアステップ35に載置した状態を示す。
【0030】
昇降リンク装置3は平行リンク機構であって、1本の上リンク40と左右一対の下リンク41,41を備えている。これらリンク40,41は、その基部側がメインフレーム15の後端部に立設した背面視門形のリンクベースフレーム42に回動自在に取り付けられ、その先端側に縦リンク43が連結されている。そして、縦リンク43の下端部に苗植付部4に回転自在に支承された連結軸44が挿入連結され、連結軸44を中心として苗植付部4がローリング自在に連結されている。
【0031】
メインフレーム15に固着した支持部材(図示せず)と上リンク40に一体形成したスイングアーム(図示せず)の先端部との間に昇降油圧式シリンダ46が設けられており、該シリンダ46を油圧で伸縮させることにより、上リンク40が上下に回動し、苗植付部4がほぼ一定姿勢のまま昇降する。
【0032】
苗植付部4は6条植の構成で、フレームを兼ねる伝動ケース50、マット苗を載せて左右往復動し苗を一株分ずつ各条の苗取出口51a,…に供給するとともに横一列分の苗を全て苗取出口51a,…に供給すると苗送りベルト51b,…により苗を下方に移送する苗載せ台51、苗取出口51a,…に供給された苗を圃場に植付ける苗植付装置52,…、次行程における機体進路を表土面に線引きする左右一対の線引きマーカ45(図1)等を備えている。
【0033】
苗植付部4の下部には中央にセンターフロート55、その左右両側にサイドフロート56,56がそれぞれ設けられている。これらフロート55,56,56を圃場の泥面に接地させた状態で機体を進行させると、フロート55,56,56が泥面を整地しつつ滑走し、その整地跡に苗植付装置52,…により苗が植え付けられる。各フロート55,56,56は圃場表土面の凹凸に応じて前端側が上下動するように回動自在に取り付けられており、植付作業時にはセンターフロート55の前部の上下動が迎角制御センサ(図示せず)の検出値に基づき苗植付部4を昇降させることにより、苗の植付深さを常に一定に維持する。
【0034】
苗植付部4には整地装置の一例であるロータ27(第1ロータ27aと第2ロータ27bの組み合わせを単にロータ27ということがある)が取り付けられている。また、苗載せ台51は苗植付部4の全体を支持する左右方向と上下方向に幅一杯の矩形の支持枠体65(支持ローラ65aと両側辺部材65bを備える)の支持ローラ65aをレールとして左右方向にスライドする構成である。
また、走行車体2の前部左右両側には、補給用の苗を載せておく一対の予備苗載せ台38,38が機体の前後に張り出す位置に設けられている(図2)。
【0035】
エンジン20の回転数を変更するエンジンサーボモータ(エンジン制御アクチュエータ)47(図3)と苗の補充作業の開始時と終了時に作業者が前記開始と終了のための手動操作する、もしくは作業者が苗の補充作業を開始したことや終了したことを自動検知する苗補充スイッチ又はセンサ(以下苗補充センサという)57が本苗移植機に配置されているので、苗補充センサ57が検知状態になると、エンジンサーボモータ47を作動させてエンジン20の回転数を低回転とする。
このように、苗補充センサ57により、補充した苗を検知することで植付部4に苗の補充作業の開始を検知すると、エンジンサーボモータ47により走行車体2の走行速度が自動的に、例えば、エンジン回転数を約1800rpmまで低下させた減速段で走行することになるため、苗補充の際に停止する必要がなく、作業能率が従来技術より向上する。また、減速段で走行することで、苗の補充の際、圃場面に凹凸等があっても、走行車体2の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性が従来技術より向上し、また操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0036】
また、無段油圧式変速装置(HST)23のトラニオン軸58(図3)の開度を変更するHSTサーボモータ59(図3)を設けているため、苗補充センサ57が苗を検知する状態になると、HSTサーボモータ59を作動させてトラニオン軸58の開度を減少させる制御を制御装置100(図3)が行うので、植付部4に苗を補充する作業を始めると、走行速度が自動的に減速され、走行停止をする必要がなく、作業能率が従来技術より向上する。また、苗の補充の際、圃場に凹凸等があっても、機体の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防止され、補充作業の安全性が従来技術より向上する。さらに、作業者が補充作業を行う作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0037】
苗補充センサ57が苗補充作業の終了を検知すると、エンジンサーボモータ47を作動させて減速前の走行速度に復帰させる制御構成も採用している。
なお、苗補充センサ57は、作業者が苗の苗載せ台51への苗の補充の始めると、又は苗の補充を終えると、前述のように(1)手動式又は(2)自動式で作動する。
【0038】
ここで苗補充センサ57の終了の認識は、該苗補充センサ57が自動的に作動するセンサである場合、作業者の操作により行い、植付部4の苗補充ガイド54a(苗載せ台51の頂部に設ける)に感圧センサを設ける場合は、感圧センサが非検知状態になった後、5〜10秒ほど経過した後である。前記感圧センサの場合、検知終了と同時に速度を復帰させると、次の苗の補充が始まった際にまた減速しなければならないので、インターバルを設けている。ここまでの苗補充に関する制御ブロック図とフローチャートを図3、図4にそれぞれ示す。
【0039】
上記フローチャートに示すように、苗載せ台51への苗の補充が終わると、苗移植機は、元の走行速度に戻ることにより、作業者が走行速度を再度設定する必要がないので、苗移植機の操作性が従来技術より向上する。また、苗の補充前と補充後の走行速度がほぼ同じになることにより、苗の植付タイミングが変わることを防止できるので、苗の植付精度が従来技術より向上する。
【0040】
操縦席31の後部で且つ後部作業ステップ36の前側には門型の支柱60を設けている。また該支柱60の上部で且つ操縦席31よりも上側位置に、弾性を有するクッション体61を設けたので、後部作業ステップ36に搭乗する作業者はこのクッション体61を簡易作業座席として用いることができるので、長時間の作業でも疲れにくくなり、作業者の労力が軽減される。また、クッション体61の取付位置が操縦席31よりも上方であることにより、機体の操縦を行う作業者のヘッドレストとすることができるので、作業者は楽な姿勢で作業を行うことができ、労力が軽減される。
【0041】
クッション体61の内部に苗補充センサ(感圧センサ)57を配置し、作業者がクッション体61に接触している間は、苗補充センサ57は非検知状態となり、作業者がクッション体61から所定時間(2〜5秒)以上離れると苗補充センサ57は検知状態となる制御構成にした。
このため、苗補充センサ57が必要なときに検知状態となりやすく、誤検知が防止される。また、作業者がクッション体61から離れて所定時間が経過した後に、苗補充センサ57が苗補充を検知状態となるため、機体の揺れ等で一瞬離れた場合に苗補充作業状態となることを防止できる。
【0042】
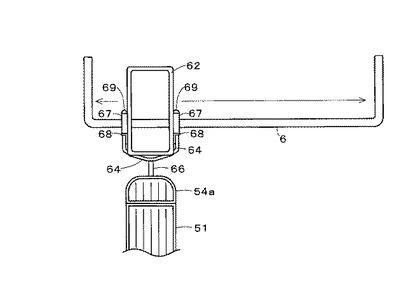
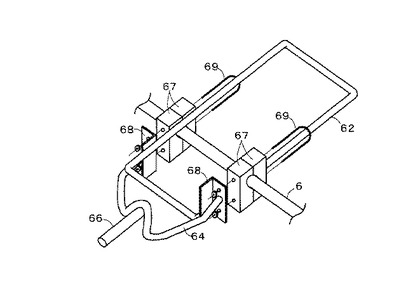
図5の平面図と図6の斜視図に示すように、フェンス部材6にスライド体62を左右方向に摺動自在に配置し、該スライド体62に苗を載置して後方に案内する苗ガイドステー64を配置し、苗ガイドステー64の左右幅は、植付部4の一条分の幅とほぼ同じとした。
フェンス部材6へのスライド体62の取り付けは、フェンス部材6の周りを一対の樹脂体67で挟み込み、挟み込んだ樹脂体67にU字状のパイプ69を貫通させて固定する。一対の樹脂体67は円筒部材からなるフェンス部材6の外形のなす径と同一径を有する2つの凹部を備えた部材であり、前記一対の樹脂体67の凹部を向かい合わせとなるように配置してフェンス部材6を挟み込む構成である。
【0043】
フェンス部材6に沿って摺動可能なスライド体62に、苗ガイドステー64を設けたことにより、作業者はこの苗ガイドステー64に苗を載せて植付部4に苗を移動させることができるので、走行車体2から身を乗り出して苗の補充を行なう必要がなく、苗補充作業の安全性が従来技術より向上する。
また、スライド体62が左右方向に摺動自在であることにより、複数個所に苗を補充する場合でも、スライド体62の位置を合わせるだけでよいので、作業能率が従来技術より向上する。
【0044】
苗ガイドステー64の後端部側に、苗補充ガイド54aに連結可能な連動ロッド66を装着した。このことにより、植付部4の左右方向への移動に合わせてスライド体62が左右方向に移動するため、苗の補充作業位置がずれて苗の補充姿勢が乱れることを防止できるので、苗が正確に圃場に植え付けられるため、植付精度が従来技術より向上する。
【0045】
苗移植機の機体の中で、熱が発生する部位又は熱が貯まる部位にミスト化する水噴霧装置を配置しておき、気化熱による雰囲気の冷却を行うことが望ましい。またミスト化水噴霧装置の運転はタイマー方式又は簡欠方式のものを用いる。
【0046】
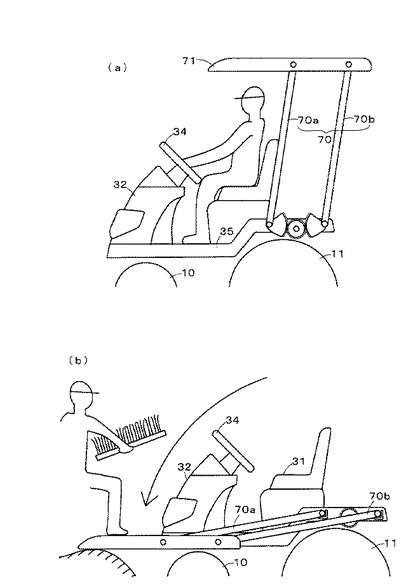
図7(a)と図7(b)に苗移植機の一実施例の要部の側面図を示すが、リンクロッド70aとリンクロッド70bからなる平行リンク70で構成された支柱にルーフとしてレインバイザ71を設ける。このレインバイザ71を図7(b)に示すように、平行リンク70を図示しない動力装置で、その基部に設けたギヤ機構を経由して回動させて延長フロントステップとして使用できるように前方に倒すと、平行リンク70からなる延長フロントステップ上を作業者などが歩行出来るので苗箱などを機体に積み込むことができる。
【0047】
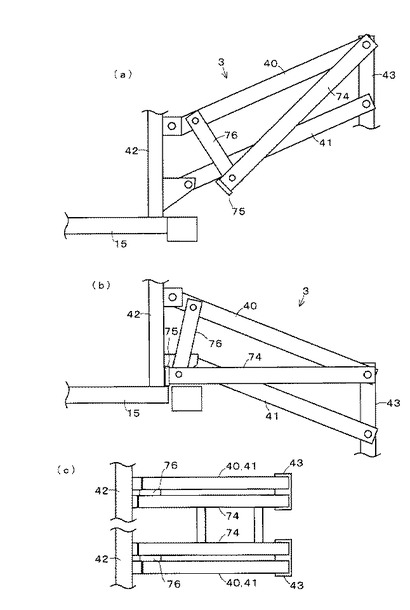
図8(a)と図8(b)に苗移植機の一実施例の昇降リンク装置3の要部の側面図と図8(c)に上記昇降リンク装置3の要部の平面図を示すが、昇降リンク装置3の1本の上リンク40に代えて左右一対の上リンク40,40と左右一対の下リンク41,41からなる平行リンク機構を設け、該上リンク40,40には角チューブ74を一端を溶接接続しておき、該角チューブ74の溶接接続した端部の反対側の端部にゴム75を取り付け、ゴム75を取り付けた角チューブ74の端部と上リンク40の基部とを支持ロッド76で固定している。
【0048】
こうして昇降リンク装置3を下げたときには前記ゴムの付いた角チューブ74の端部がリンクベースフレーム42に当接する。こうして油圧シリンダ46の引っ張り荷重を角チューブ74のゴム75付き端部で受けることで、油圧シリンダ46とそれに付随する部品の耐久性を高め、これらの部材の変形防止を図ることができる。
【産業上の利用可能性】
【0049】
本発明の苗移植機は、田植機に限らず、野菜苗などのその他の苗を植え付ける苗移植機として利用可能性がある。
【符号の説明】
【0050】
1 乗用型田植機 2 走行車体
3 昇降リンク装置 4 苗植付部
6 フェンス部材 10 前輪
11 後輪 12 ミッションケース
13 前輪ファイナルケース 15 メインフレーム
18 後輪ギヤケース 20 エンジン
21 ベルト伝動装置 23 油圧無段変速装置(HST)
25 植付クラッチケース 26 植付伝動軸
27(27a,27b) ロータ 30 エンジンカバー
31 操縦席 32 フロントカバー
33 操縦部 34 ハンドル
35 フロアステップ 36 リヤステップ
38 予備苗載せ台 40 上リンク
41 下リンク 42 リンクベースフレーム
43 縦リンク 44 連結軸
45 線引きマーカ 46 昇降油圧式シリンダ
47 エンジン制御アクチュエータ(エンジンサーボモータ)
50 伝動ケース 51 苗載せ台
51a 苗取出口 52 苗植付装置
54a 苗補充ガイド 55 センターフロート
56 サイドフロート
57 苗補充センサ(感圧センサ)又はスイッチ
58 トラニオン軸
59 HST制御アクチュエータ(HSTサーボモータ)
60 門型の支柱 61 クッション体
62 スライド体 64 苗ガイドステー
65 支持枠体 65a 支持ローラ
65b 両側辺部材 66 ロッド
67 樹脂体 69 U字状パイプ
70 平行リンク 70a,70b リンクロッド
71 レインバイザ 74 角チューブ
75 ゴム 76 支持ロッド
80 畦クラッチレバー 100 制御装置
【技術分野】
【0001】
この発明は、走行装置と苗植付装置などを備えた苗移植機に関する。
【背景技術】
【0002】
苗植付装置を機体後部に備えた苗移植機において、機体のステップ上に苗載せスペースを備えた苗移植機が知られている。
特許文献1記載の苗移植機では、植付装置に載置された苗の量が所定量未満になると、走行速度を減速させて苗の減少を報知すると共に苗植付装置への苗の補充作業への移行を行いやすくする機能が備えられている。
また、特許文献2記載の苗移植機では、苗の補充を行う際、作業者が操縦席から離れたことが検出されると、自動的にエンジンをアイドリング回転数に切り替えてその場に停止し、安全に苗の補充を行える機能が備えられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−207104号公報
【特許文献2】特開2011−050343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1記載の発明では、苗の補充作業を行う前から走行速度が減速し始めるため、作業者が苗の補充を行うまで低速作業が継続されてしまい、作業能率が低下する問題がある。
また、特許文献2記載の苗移植機では、操縦者とは別に苗の補充等を行う作業者が搭乗している場合、苗の補充作業の際には操縦者が走行停止操作を行わねばならず、補充作業時の自動停止機能が活用されない問題がある。
【0005】
特に、中国など、圃場面積が広い耕地で用いる多量の苗を機体上に載せておき、苗植付得作業を能率的に行えるように、車体上のスペースに載せられるだけの苗を載せて作業を行うケースがある。このため、操縦者と苗の補充作業者の2名で作業をすることが多く、苗の補充作業を速やかに行うために車両を完全に停止させないで、苗を積み込む作業を行うことができ、また圃場の凹凸等で機体が揺れても、作業者が転ぶことがなく、また植付装置に投入された苗の姿勢が乱れないようにすることが必要である。
そこで、本発明の課題は、苗の補充作業等を行うときに、機体を走行させながら苗の補充を安全に行うことが、作業者の安全を確保できる苗移植機を提供することである。
【課題を解決するための手段】
【0006】
上記課題は、下記構成によって達成される。
すなわち、請求項1に係る発明は、エンジン(20)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)に操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、エンジン(20)の回転数を変更する制御アクチュエータ(サーボモータ)(47)と、苗の補充作業の開始と苗補充の終了を検知する又は人間の苗補充の開始と終了時に人間が操作する苗補充検知装置(苗補充センサ又はスイッチ)(57)と、苗補充検知装置(57)が検知状態になるとエンジン制御アクチュエータ(エンジンサーボモータ)(47)を作動させてエンジン(20)の回転数を低回転とする制御構成を有する制御装置(100)を備えたことを特徴とする苗移植機である。
【0007】
請求項2に係る発明は、無段油圧式変速装置(HST)(23)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)の操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、HST(23)のトラニオン軸(58)の開度を変更するHST制御アクチュエータ(HSTサーボモータ)(59)と、苗の補充作業の開始を検知する苗補充検知装置(苗補充センサ又はスイッチ)(57)と、制御装置(100)は苗補充検知装置(57)が苗を検知する状態になると、HST制御アクチュエータ(HSTサーボモータ)(47)を作動させてトラニオン軸(58)の開度を減少させる制御構成を備えたことを特徴とする苗移植機である。
【0008】
請求項3に係る発明は、苗補充検知装置(57)が苗補充作業の終了を検知すると、制御装置(100)はエンジン制御アクチュエータ(エンジンサーボモータ)(47)を作動させて減速前の走行速度に復帰させる制御構成としたことを特徴とする請求項1または2記載の苗移植機である。
【0009】
なお、苗補充検知装置57には、次のような(1)手動式と(2)自動式のものがある。 (1)手動式:苗補充検知装置57がスイッチ式の場合であれば、苗の補充作業を始める前に作業者が苗補充検知装置57を、開始操作をすると共に、苗の補充作業を終えるともう一度終了操作をする方式であり、この方式では誤検知が起きにくいが、開始時や終了時の操作忘れを生じることがある。
(2)自動式:苗補充検知装置57を苗載せ台51の上部の苗補充ガイド54aに設け、苗補充ガイド54aにマット苗が載るとその重量で「開始」を認識し、マット苗が苗載せ台51上に送り込まれて苗補充ガイド54a上を通過し終えると「終了」を認識することができる。この方式では入れ忘れや切り忘れは起きにくいが、苗補充ガイド54aに泥土などが付着して重量が増加すると、誤検知する可能性がある。
【0010】
ここで苗補充検知装置57の終了の認識は、該補充検知装置57が自動的に作動するスイッチ式である場合(自動式)は、作業者の操作により行い、植付部4の苗補充ガイド54a(苗載せ台51の頂部に設ける)に感圧センサを設ける場合は、感圧センサが非検知状態になった後、5〜10秒ほど経過した後である。前記感圧センサの場合、検知終了と同時に速度を復帰させると、次の苗の補充が始まった際にまた減速しなければならないので、インターバルを設ける。
ここまでの苗補充に関する制御ブロック図とフローチャートを図3,図4にそれぞれ示す。
【0011】
請求項4に係る発明は、操縦部(33)に操縦者が搭乗する操縦席(31)を設け、操縦座席(31)の後部で且つ後部作業ステップ(36)の前側に(門型の)支柱(60)を設け、該支柱(60)の上部で且つ操縦席(31)よりも上側位置に、弾性を有するクッション体(61)を設けたことを特徴とする請求項1から3の何れか1項に記載の苗移植機である。
【0012】
請求項5に係る発明は、クッション体(61)の内部に苗補充検知装置(57)を配置し、作業者がクッション体(61)に接触している間は苗補充検知装置(57)は非検知状態となり、作業者がクッション体(61)から所定時間(2〜5秒)以上離れると苗補充検知装置(57)は検知状態となることを特徴とする請求項4に記載の苗移植機である。
【0013】
請求項6に係る発明は、フェンス部材(6)にスライド体(62)を左右方向に摺動自在に配置し、該スライド体(62)に苗を載置して後方に案内する苗ガイドステー(64)を配置し、苗ガイドステー(64)の左右幅は、植付部(4)の一条分の幅とほぼ同じとしたことを特徴とする請求項1から5の何れか1項に記載の苗移植機である。
【0014】
たとえばフェンス部材6へのスライド体62の取り付けは、フェンス部材6の周りを一対の樹脂体で挟み込み、挟み込んだ樹脂体のU字状のパイプを貫通させて固定する。一対の樹脂体は円筒部材からなるフェンス部材6の外形を二分した凹部を備えた部材であり、前記一対の凹部を向かい合わせとなるように配置してフェンス部材6を挟み込む構成である。
【0015】
請求項7に係る発明は、苗ガイドステー(64)の後端部側に、苗補充ガイド(54a)に連結可能な連動ロッド(66)を装着したことを特徴とする請求項6に記載の苗移植機である。
【発明の効果】
【0016】
請求項1記載の発明によれば、苗補充検知装置(苗補充センサ又はスイッチ)57による検知で植付部4に苗の補充作業の開始が始まると、エンジン制御アクチュエータ(エンジンサーボモータ)47により走行車体2の走行速度が自動的に、例えば約1800rpm(アイドリング時の回転数に近い回転数)の減速段で走行することになるため、苗補充の際に停止する必要がなく、作業能率が従来技術より向上する。
【0017】
また、減速段で走行することで、苗の補充の際、圃場面に凹凸等があっても、走行車体2の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性が従来技術より向上する。
こうして、苗補充作業を行う操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0018】
請求項2記載の発明によれば、植付部4に苗を補充する作業を始めると、走行速度が自動的に減速されることにより苗補充の際に停止する必要がないので、作業能率が従来技術より向上する。また、苗の補充の際、圃場に凹凸等があっても、機体の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防止され、補充作業の安全性が従来技術より向上する。
さらに、補充作業を行う作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0019】
請求項3記載の発明によれば、請求項1,2記載の発明の効果に加えて、苗載せ台51への苗の補充が終わると元の走行速度に戻ることにより、作業者が苗移植機の走行速度を再度設定する必要がないので、苗移植機の操作性が従来技術より向上する。また、苗の補充前と補充後の走行速度がほぼ同じになることにより、苗の植付タイミングが変わることを防止できるので、苗の植付精度が従来技術より向上する。
【0020】
請求項4記載の発明によれば、請求項1から3のいずれかに記載の発明の効果に加えて、操縦席31の後部で且つ後部作業ステップ36の前側に配置する支柱60の上部にクッション体61を設けたことにより、後部作業ステップ36に搭乗する作業者はこのクッション体61を簡易作業座席として用いることができ、長時間の作業でも疲れにくくなり、作業者の労力が軽減される。
また、クッション体61の取付位置が操縦席31よりも上方であることにより、機体の操縦を行う作業者のヘッドレストとすることができるので、作業者は楽な姿勢で作業を行うことができ、労力が軽減される。
【0021】
請求項5記載の発明によれば、請求項4記載の発明の効果に加えて、クッション体61の内部に苗補充検知装置57を配置し、苗の補充を行う作業者がクッション体61から離れると、苗補充作業状態であることが自動的に検知される構成としたことにより、苗補充検知装置57が必要なときに検知状態となりやすく、誤検知が防止される。
また、作業者がクッション体61から離れて所定時間が経過した後に、苗補充検知装置57が苗補充を検知状態なるため、機体の揺れ等で一瞬離れた場合に苗補充作業状態となることを防止できる。
【0022】
請求項6記載の発明によれば、請求項1から5のいずれかに記載の発明の効果に加えて、フェンス部材6に沿って摺動可能なスライド体62に、苗ガイドステー64を設けたことにより、作業者はこの苗ガイドステー64に苗を載せて植付部4に苗を移動させることができるので、走行車体2から身を乗り出して苗の補充を行う必要がなく、苗補充作業の安全性が従来技術より向上する。また、スライド体62が左右方向に摺動自在であることにより、複数個所に苗を補充する場合でも、スライド体62の位置を合わせるだけでよいので、作業能率が従来技術より向上する。
【0023】
請求項7記載の発明によれば、請求項6記載の発明の効果に加えて、苗ガイドステー64と苗補充ガイド54aを連動ロッド66で繋ぐことにより、植付部の左右方向への移動に合わせてスライド体62が左右方向に移動するため、苗の補充作業位置がずれて苗の補充姿勢が乱れることを防止できるので、苗が正確に圃場に植え付けられるため、植付精度が従来技術より向上する。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施形態の乗用型田植機の側面図である。
【図2】図1の乗用型田植機の平面図である。
【図3】図1の乗用型田植機の苗補充に関する制御ブロック図である。
【図4】図1の乗用型田植機の苗補充に関する制御フローチャートである。
【図5】図1の乗用型田植機のフェンス部材にスライド体を左右方向に摺動自在に配置した場合の平面図である。
【図6】図1の乗用型田植機のフェンス部材にスライド体を左右方向に摺動自在に配置した場合の斜視図である。
【図7】図1の乗用型田植機の一実施例のレインバイザ部分の側面図(図7(a)と図7(b))である。
【図8】図1の乗用型田植機の一実施例の昇降リンク装置部分の側面図(図8(a)と図8(b))、昇降リンク装置部分の平面図(図8(c))である。
【発明を実施するための最良の形態】
【0025】
以下、図面に基づき、本発明の好ましい実施の形態について説明する。
図1及び図2は本発明の苗移植機の典型例である乗用型田植機の側面図と平面図である。この乗用型田植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に図示していない施肥装置の本体部分を配置することもできる。搭乗オペレータが乗用型田植機の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向と後進方向をそれぞれ前、後という。
【0026】
走行車体2は、駆動輪である左右一対の前輪10,10及び左右一対の後輪(走行装置)11,11を備えた四輪駆動車両であって、機体の前部にミッションケース12が配置され、そのミッションケース12の左右側方に前輪ファイナルケース13,13が設けられ、該左右前輪ファイナルケース13,13の操向方向を変更可能な各々の前輪支持部から外向きに突出する左右前輪車軸に左右前輪10,10が各々取り付けられている。また、ミッションケース12の背面部にメインフレーム15の前端部が固着されており、そのメインフレーム15の後端左右中央部に前後水平に設けた後輪ローリング軸を支点にして後輪ギヤケース18,18がローリング自在に支持され、その後輪ギヤケース18,18から外向きに突出する後輪車軸に後輪11,11が取り付けられている。
【0027】
エンジン20はメインフレーム15の上に搭載されており、該エンジン20の回転動力が、ベルト伝動装置21及び油圧無段変速装置(HST)23を介してミッションケース12に伝達される。ミッションケース12に伝達された回転動力は、該ケース12内のトランスミッションにより変速された後、走行動力と外部取出動力に分離して取り出される。そして、走行動力は、一部が前輪ファイナルケース13,13に伝達されて前輪10,10を駆動すると共に、残りが後輪ギヤケース18,18に伝達されて後輪11,11を駆動する。また、外部取出動力は、走行車体2の後部に設けた植付クラッチケース25に伝達され、それから植付伝動軸26によって苗植付部4へ伝動される。
【0028】
エンジン20の上部はエンジンカバー30で覆われており、その上に座席31が設置されている。座席31の前方には各種操作機構を内蔵するフロントカバー32があり、その上方に前輪10,10を操向操作するハンドル34が設けられており、この領域を操縦部33とする。エンジンカバー30及びフロントカバー32の下端左右両側は水平状のフロアステップ35になっている。フロアステップ35は一部格子状になっており、該ステップ35を歩く作業者の靴についた泥が圃場に落下するようになっている。フロアステップ35上の後部は、後輪フェンダを兼ねるリヤステップ36となっている。
【0029】
なお、図2の全体平面図に示すようにリヤステップ36には突起36aを設けているので、苗箱や、苗を何重にも巻いた巻き苗(ロール苗)Rをリヤステップ36に載置した後にスライド移動をし易い。さらに操縦席31の両側に2個ずつ配置した畦クラッチレバー80の外側のリヤステップ36には苗箱や巻き苗(ロール苗)R(R1、R2)を搭載できるスペースを設けているので、苗箱や巻き苗(ロール苗)Rが畦クラッチレバー80の操作性を邪魔しない。なお、図2には巻いた状態のロール苗R1と開いた状態のロール苗R2をフロアステップ35に載置した状態を示す。
【0030】
昇降リンク装置3は平行リンク機構であって、1本の上リンク40と左右一対の下リンク41,41を備えている。これらリンク40,41は、その基部側がメインフレーム15の後端部に立設した背面視門形のリンクベースフレーム42に回動自在に取り付けられ、その先端側に縦リンク43が連結されている。そして、縦リンク43の下端部に苗植付部4に回転自在に支承された連結軸44が挿入連結され、連結軸44を中心として苗植付部4がローリング自在に連結されている。
【0031】
メインフレーム15に固着した支持部材(図示せず)と上リンク40に一体形成したスイングアーム(図示せず)の先端部との間に昇降油圧式シリンダ46が設けられており、該シリンダ46を油圧で伸縮させることにより、上リンク40が上下に回動し、苗植付部4がほぼ一定姿勢のまま昇降する。
【0032】
苗植付部4は6条植の構成で、フレームを兼ねる伝動ケース50、マット苗を載せて左右往復動し苗を一株分ずつ各条の苗取出口51a,…に供給するとともに横一列分の苗を全て苗取出口51a,…に供給すると苗送りベルト51b,…により苗を下方に移送する苗載せ台51、苗取出口51a,…に供給された苗を圃場に植付ける苗植付装置52,…、次行程における機体進路を表土面に線引きする左右一対の線引きマーカ45(図1)等を備えている。
【0033】
苗植付部4の下部には中央にセンターフロート55、その左右両側にサイドフロート56,56がそれぞれ設けられている。これらフロート55,56,56を圃場の泥面に接地させた状態で機体を進行させると、フロート55,56,56が泥面を整地しつつ滑走し、その整地跡に苗植付装置52,…により苗が植え付けられる。各フロート55,56,56は圃場表土面の凹凸に応じて前端側が上下動するように回動自在に取り付けられており、植付作業時にはセンターフロート55の前部の上下動が迎角制御センサ(図示せず)の検出値に基づき苗植付部4を昇降させることにより、苗の植付深さを常に一定に維持する。
【0034】
苗植付部4には整地装置の一例であるロータ27(第1ロータ27aと第2ロータ27bの組み合わせを単にロータ27ということがある)が取り付けられている。また、苗載せ台51は苗植付部4の全体を支持する左右方向と上下方向に幅一杯の矩形の支持枠体65(支持ローラ65aと両側辺部材65bを備える)の支持ローラ65aをレールとして左右方向にスライドする構成である。
また、走行車体2の前部左右両側には、補給用の苗を載せておく一対の予備苗載せ台38,38が機体の前後に張り出す位置に設けられている(図2)。
【0035】
エンジン20の回転数を変更するエンジンサーボモータ(エンジン制御アクチュエータ)47(図3)と苗の補充作業の開始時と終了時に作業者が前記開始と終了のための手動操作する、もしくは作業者が苗の補充作業を開始したことや終了したことを自動検知する苗補充スイッチ又はセンサ(以下苗補充センサという)57が本苗移植機に配置されているので、苗補充センサ57が検知状態になると、エンジンサーボモータ47を作動させてエンジン20の回転数を低回転とする。
このように、苗補充センサ57により、補充した苗を検知することで植付部4に苗の補充作業の開始を検知すると、エンジンサーボモータ47により走行車体2の走行速度が自動的に、例えば、エンジン回転数を約1800rpmまで低下させた減速段で走行することになるため、苗補充の際に停止する必要がなく、作業能率が従来技術より向上する。また、減速段で走行することで、苗の補充の際、圃場面に凹凸等があっても、走行車体2の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性が従来技術より向上し、また操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0036】
また、無段油圧式変速装置(HST)23のトラニオン軸58(図3)の開度を変更するHSTサーボモータ59(図3)を設けているため、苗補充センサ57が苗を検知する状態になると、HSTサーボモータ59を作動させてトラニオン軸58の開度を減少させる制御を制御装置100(図3)が行うので、植付部4に苗を補充する作業を始めると、走行速度が自動的に減速され、走行停止をする必要がなく、作業能率が従来技術より向上する。また、苗の補充の際、圃場に凹凸等があっても、機体の急激な揺れが発生しにくいので、作業者がバランスを崩して転ぶことが防止され、補充作業の安全性が従来技術より向上する。さらに、作業者が補充作業を行う作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
【0037】
苗補充センサ57が苗補充作業の終了を検知すると、エンジンサーボモータ47を作動させて減速前の走行速度に復帰させる制御構成も採用している。
なお、苗補充センサ57は、作業者が苗の苗載せ台51への苗の補充の始めると、又は苗の補充を終えると、前述のように(1)手動式又は(2)自動式で作動する。
【0038】
ここで苗補充センサ57の終了の認識は、該苗補充センサ57が自動的に作動するセンサである場合、作業者の操作により行い、植付部4の苗補充ガイド54a(苗載せ台51の頂部に設ける)に感圧センサを設ける場合は、感圧センサが非検知状態になった後、5〜10秒ほど経過した後である。前記感圧センサの場合、検知終了と同時に速度を復帰させると、次の苗の補充が始まった際にまた減速しなければならないので、インターバルを設けている。ここまでの苗補充に関する制御ブロック図とフローチャートを図3、図4にそれぞれ示す。
【0039】
上記フローチャートに示すように、苗載せ台51への苗の補充が終わると、苗移植機は、元の走行速度に戻ることにより、作業者が走行速度を再度設定する必要がないので、苗移植機の操作性が従来技術より向上する。また、苗の補充前と補充後の走行速度がほぼ同じになることにより、苗の植付タイミングが変わることを防止できるので、苗の植付精度が従来技術より向上する。
【0040】
操縦席31の後部で且つ後部作業ステップ36の前側には門型の支柱60を設けている。また該支柱60の上部で且つ操縦席31よりも上側位置に、弾性を有するクッション体61を設けたので、後部作業ステップ36に搭乗する作業者はこのクッション体61を簡易作業座席として用いることができるので、長時間の作業でも疲れにくくなり、作業者の労力が軽減される。また、クッション体61の取付位置が操縦席31よりも上方であることにより、機体の操縦を行う作業者のヘッドレストとすることができるので、作業者は楽な姿勢で作業を行うことができ、労力が軽減される。
【0041】
クッション体61の内部に苗補充センサ(感圧センサ)57を配置し、作業者がクッション体61に接触している間は、苗補充センサ57は非検知状態となり、作業者がクッション体61から所定時間(2〜5秒)以上離れると苗補充センサ57は検知状態となる制御構成にした。
このため、苗補充センサ57が必要なときに検知状態となりやすく、誤検知が防止される。また、作業者がクッション体61から離れて所定時間が経過した後に、苗補充センサ57が苗補充を検知状態となるため、機体の揺れ等で一瞬離れた場合に苗補充作業状態となることを防止できる。
【0042】
図5の平面図と図6の斜視図に示すように、フェンス部材6にスライド体62を左右方向に摺動自在に配置し、該スライド体62に苗を載置して後方に案内する苗ガイドステー64を配置し、苗ガイドステー64の左右幅は、植付部4の一条分の幅とほぼ同じとした。
フェンス部材6へのスライド体62の取り付けは、フェンス部材6の周りを一対の樹脂体67で挟み込み、挟み込んだ樹脂体67にU字状のパイプ69を貫通させて固定する。一対の樹脂体67は円筒部材からなるフェンス部材6の外形のなす径と同一径を有する2つの凹部を備えた部材であり、前記一対の樹脂体67の凹部を向かい合わせとなるように配置してフェンス部材6を挟み込む構成である。
【0043】
フェンス部材6に沿って摺動可能なスライド体62に、苗ガイドステー64を設けたことにより、作業者はこの苗ガイドステー64に苗を載せて植付部4に苗を移動させることができるので、走行車体2から身を乗り出して苗の補充を行なう必要がなく、苗補充作業の安全性が従来技術より向上する。
また、スライド体62が左右方向に摺動自在であることにより、複数個所に苗を補充する場合でも、スライド体62の位置を合わせるだけでよいので、作業能率が従来技術より向上する。
【0044】
苗ガイドステー64の後端部側に、苗補充ガイド54aに連結可能な連動ロッド66を装着した。このことにより、植付部4の左右方向への移動に合わせてスライド体62が左右方向に移動するため、苗の補充作業位置がずれて苗の補充姿勢が乱れることを防止できるので、苗が正確に圃場に植え付けられるため、植付精度が従来技術より向上する。
【0045】
苗移植機の機体の中で、熱が発生する部位又は熱が貯まる部位にミスト化する水噴霧装置を配置しておき、気化熱による雰囲気の冷却を行うことが望ましい。またミスト化水噴霧装置の運転はタイマー方式又は簡欠方式のものを用いる。
【0046】
図7(a)と図7(b)に苗移植機の一実施例の要部の側面図を示すが、リンクロッド70aとリンクロッド70bからなる平行リンク70で構成された支柱にルーフとしてレインバイザ71を設ける。このレインバイザ71を図7(b)に示すように、平行リンク70を図示しない動力装置で、その基部に設けたギヤ機構を経由して回動させて延長フロントステップとして使用できるように前方に倒すと、平行リンク70からなる延長フロントステップ上を作業者などが歩行出来るので苗箱などを機体に積み込むことができる。
【0047】
図8(a)と図8(b)に苗移植機の一実施例の昇降リンク装置3の要部の側面図と図8(c)に上記昇降リンク装置3の要部の平面図を示すが、昇降リンク装置3の1本の上リンク40に代えて左右一対の上リンク40,40と左右一対の下リンク41,41からなる平行リンク機構を設け、該上リンク40,40には角チューブ74を一端を溶接接続しておき、該角チューブ74の溶接接続した端部の反対側の端部にゴム75を取り付け、ゴム75を取り付けた角チューブ74の端部と上リンク40の基部とを支持ロッド76で固定している。
【0048】
こうして昇降リンク装置3を下げたときには前記ゴムの付いた角チューブ74の端部がリンクベースフレーム42に当接する。こうして油圧シリンダ46の引っ張り荷重を角チューブ74のゴム75付き端部で受けることで、油圧シリンダ46とそれに付随する部品の耐久性を高め、これらの部材の変形防止を図ることができる。
【産業上の利用可能性】
【0049】
本発明の苗移植機は、田植機に限らず、野菜苗などのその他の苗を植え付ける苗移植機として利用可能性がある。
【符号の説明】
【0050】
1 乗用型田植機 2 走行車体
3 昇降リンク装置 4 苗植付部
6 フェンス部材 10 前輪
11 後輪 12 ミッションケース
13 前輪ファイナルケース 15 メインフレーム
18 後輪ギヤケース 20 エンジン
21 ベルト伝動装置 23 油圧無段変速装置(HST)
25 植付クラッチケース 26 植付伝動軸
27(27a,27b) ロータ 30 エンジンカバー
31 操縦席 32 フロントカバー
33 操縦部 34 ハンドル
35 フロアステップ 36 リヤステップ
38 予備苗載せ台 40 上リンク
41 下リンク 42 リンクベースフレーム
43 縦リンク 44 連結軸
45 線引きマーカ 46 昇降油圧式シリンダ
47 エンジン制御アクチュエータ(エンジンサーボモータ)
50 伝動ケース 51 苗載せ台
51a 苗取出口 52 苗植付装置
54a 苗補充ガイド 55 センターフロート
56 サイドフロート
57 苗補充センサ(感圧センサ)又はスイッチ
58 トラニオン軸
59 HST制御アクチュエータ(HSTサーボモータ)
60 門型の支柱 61 クッション体
62 スライド体 64 苗ガイドステー
65 支持枠体 65a 支持ローラ
65b 両側辺部材 66 ロッド
67 樹脂体 69 U字状パイプ
70 平行リンク 70a,70b リンクロッド
71 レインバイザ 74 角チューブ
75 ゴム 76 支持ロッド
80 畦クラッチレバー 100 制御装置
【特許請求の範囲】
【請求項1】
エンジン(20)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)に操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、
エンジン(20)の回転数を変更する制御アクチュエータ(47)と、
苗の補充作業の開始と苗補充の終了を検知する又は人間の苗補充の開始と終了時に人間が操作する苗補充検知装置(57)と、
苗補充検知装置(57)が検知状態になるとエンジン制御アクチュエータ(47)を作動させてエンジン(20)の回転数を低回転とする制御構成を有する制御装置(100)
を備えたことを特徴とする苗移植機。
【請求項2】
無段油圧式変速装置(23)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)の操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、
HST(23)のトラニオン軸(58)の開度を変更するHST制御アクチュエータ(59)と、
苗の補充作業の開始を検知する苗補充検知装置(57)と、
制御装置(100)は苗補充検知装置(57)が苗を検知する状態になると、HST制御アクチュエータ(47)を作動させてトラニオン軸(58)の開度を減少させる制御構成
を備えたことを特徴とする苗移植機。
【請求項3】
苗補充検知装置(57)が苗補充作業の終了を検知すると、制御装置(100)はエンジン制御アクチュエータ(47)を作動させて減速前の走行速度に復帰させる制御構成としたことを特徴とする請求項1または2記載の苗移植機。
【請求項4】
操縦部(33)に操縦者が搭乗する操縦席(31)を設け、
操縦座席(31)の後部で且つ後部作業ステップ(36)の前側に(門型の)支柱(60)を設け、
該支柱(60)の上部で且つ操縦席(31)よりも上側位置に、弾性を有するクッション体(61)を設けた
ことを特徴とする請求項1から3の何れか1項に記載の苗移植機。
【請求項5】
クッション体(61)の内部に苗補充検知装置(57)を配置し、作業者がクッション体(61)に接触している間は苗補充検知装置(57)は非検知状態となり、作業者がクッション体(61)から所定時間以上離れると苗補充検知装置(57)は検知状態となる
ことを特徴とする請求項4に記載の苗移植機。
【請求項6】
フェンス部材(6)にスライド体(62)を左右方向に摺動自在に配置し、
該スライド体(62)に苗を載置して後方に案内する苗ガイドステー(64)を配置し、
苗ガイドステー(64)の左右幅は、植付部(4)の一条分の幅とほぼ同じとした
ことを特徴とする請求項1から5の何れか1項に記載の苗移植機。
【請求項7】
苗ガイドステー(64)の後端部側に、苗補充ガイド(54a)に連結可能な連動ロッド(66)を装着したことを特徴とする請求項6に記載の苗移植機。
【請求項1】
エンジン(20)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)に操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、
エンジン(20)の回転数を変更する制御アクチュエータ(47)と、
苗の補充作業の開始と苗補充の終了を検知する又は人間の苗補充の開始と終了時に人間が操作する苗補充検知装置(57)と、
苗補充検知装置(57)が検知状態になるとエンジン制御アクチュエータ(47)を作動させてエンジン(20)の回転数を低回転とする制御構成を有する制御装置(100)
を備えたことを特徴とする苗移植機。
【請求項2】
無段油圧式変速装置(23)と走行車体(2)の後方に圃場に苗を植え付ける植付部(4)と走行車体(2)の操縦部(33)と操縦部(33)の後部に後部作業ステップ(36)とフェンス部材(6)を設けた苗移植機において、
HST(23)のトラニオン軸(58)の開度を変更するHST制御アクチュエータ(59)と、
苗の補充作業の開始を検知する苗補充検知装置(57)と、
制御装置(100)は苗補充検知装置(57)が苗を検知する状態になると、HST制御アクチュエータ(47)を作動させてトラニオン軸(58)の開度を減少させる制御構成
を備えたことを特徴とする苗移植機。
【請求項3】
苗補充検知装置(57)が苗補充作業の終了を検知すると、制御装置(100)はエンジン制御アクチュエータ(47)を作動させて減速前の走行速度に復帰させる制御構成としたことを特徴とする請求項1または2記載の苗移植機。
【請求項4】
操縦部(33)に操縦者が搭乗する操縦席(31)を設け、
操縦座席(31)の後部で且つ後部作業ステップ(36)の前側に(門型の)支柱(60)を設け、
該支柱(60)の上部で且つ操縦席(31)よりも上側位置に、弾性を有するクッション体(61)を設けた
ことを特徴とする請求項1から3の何れか1項に記載の苗移植機。
【請求項5】
クッション体(61)の内部に苗補充検知装置(57)を配置し、作業者がクッション体(61)に接触している間は苗補充検知装置(57)は非検知状態となり、作業者がクッション体(61)から所定時間以上離れると苗補充検知装置(57)は検知状態となる
ことを特徴とする請求項4に記載の苗移植機。
【請求項6】
フェンス部材(6)にスライド体(62)を左右方向に摺動自在に配置し、
該スライド体(62)に苗を載置して後方に案内する苗ガイドステー(64)を配置し、
苗ガイドステー(64)の左右幅は、植付部(4)の一条分の幅とほぼ同じとした
ことを特徴とする請求項1から5の何れか1項に記載の苗移植機。
【請求項7】
苗ガイドステー(64)の後端部側に、苗補充ガイド(54a)に連結可能な連動ロッド(66)を装着したことを特徴とする請求項6に記載の苗移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−90606(P2013−90606A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235786(P2011−235786)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]