
荷役物運搬機
【課題】重量が軽く、コンパクトであるので、手動で天井を走行させたときに作業者が軽快に走行させられるという荷役物運搬機を提供する。
【解決手段】プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車を単数又複数は有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車を単数又複数は有し、プレート19はプレート10に係合され、プレート19はプレート10で水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され複数の動滑車と定滑車18を介し他端は吊り具5に結合され、シリンダ11のロッド13が伸縮した距離に動滑車の総数の2倍を掛け算した距離を荷役物6が昇降する。
【解決手段】プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車を単数又複数は有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車を単数又複数は有し、プレート19はプレート10に係合され、プレート19はプレート10で水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され複数の動滑車と定滑車18を介し他端は吊り具5に結合され、シリンダ11のロッド13が伸縮した距離に動滑車の総数の2倍を掛け算した距離を荷役物6が昇降する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シリンダと複数の滑車とロープを有した荷役物運搬機の昇降駆動部に関するものである。
【背景技術】
【0002】
従来は、駆動部にモータを用いた巻き上げ機や、シリンダを用いた昇降機があった。従来例(特願平11−288603号公報)である図15は、重量が重くなり、図16はコンパクトで無いという不具合があった。
【特許文献1】特願平11−288603号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
解決しようとする問題点は、荷役物運搬機の重量が重く、コンパクトで無いという点である。
【課題を解決するための手段】
【0004】
プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車を単数又複数は有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車を単数又複数は有し、プレート19はプレート10で水平方向に可動し、全ての動滑車は水平方向に可動し、ロープ22は定滑車17を掛架しロープ23の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され複数の動滑車と定滑車18を介し他端は吊り具5に結合され、シリンダ11のロッド13が伸縮した距離に動滑車の総数の2倍を掛け算した距離を荷役物6が昇降する。
【0005】
本発明は、シリンダのロッドが伸縮した距離に動滑車の数の2倍を掛け算した距離を荷役物が昇降する事を最も主要な特徴とする。
【0006】
請求項2は実施例1で説明し、請求項3は実施例2で説明し、請求項4は実施例3で説明し、請求項1は実施例1〜4を含んでいる。
【発明の効果】
【0007】
本発明の荷役物運搬機は、重量が軽く、コンパクトであるので、手動で天井を走行させたときに作業者が軽快に走行させられるという利点がある。また、地上型の場合は、コンパクトな構成となる。
【実施例1】
【0008】
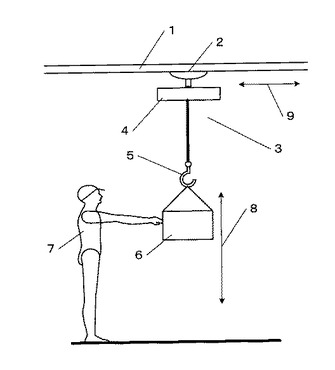
図1は、本発明の総体図である。レール1にトロリー2が係合されており、トロリー2に荷役物運搬機3が係合されている。荷役物運搬機3には昇降駆動部4と吊り具5を有し、荷役物6が吊られている。作業者7が荷役物6を把持して、矢印8方向に昇降させる。また、トロリー2により、荷役物運搬機3が矢印9方向に手動で走行する。
【0009】
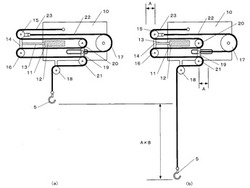
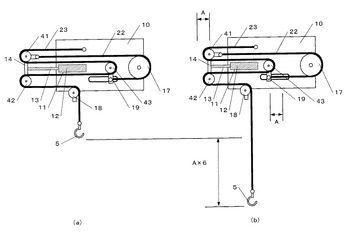
図2は、実施例1の昇降駆動部の機構図である。図2(a)は吊り具が上部にある時で、図2(b)は吊り具が下部に下降したときである。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車15と動滑車16を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車20と動滑車21を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車15と動滑車16と動滑車20と動滑車21は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート14に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車15→動滑車20→動滑車16→動滑車21→定滑車18と順に懸架され他端は吊り具5に結合されている。実施例では、プレート19はプレート10に係合されているが、プレート19は、ロープ22とロープ23の張力の作用で、係合していなくても作用には支障ない。
【0010】
実施例1の作用を図1と図2で説明する。図2(a)の状態から吊り具5に吊られた荷役物6を作業者7が下降させると、吊り具5が下降を始め、ロープ23が下方向に引き込まれる。ロープ23の一端がプレート10に結合されており、また、ロープ22が定滑車17を介してプレート14とプレート19を結合しているので、吊り具5が引き込まれると同時にプレート14とプレート19が同じ距離を水平方向に移動する。シリンダ11のロッド13が縮むので、プレート14が図に向かって右側に移動し、それと同時にロープ22に結合されたプレート19が図に向かって左側に移動する。シリンダ11のロッド13が縮んだ距離Aに動滑車の総数の2倍を掛け算した距離を荷役物6が移動する。図2の場合は、動滑車が4個であるので、Aの8倍の距離を吊り具5と荷役物6が下降する。図2(a)の状態からシリンダ11が縮んだAの8倍の距離を吊り具5と荷役物6が下降したのが図2(b)の状態である。
【実施例2】
【0011】
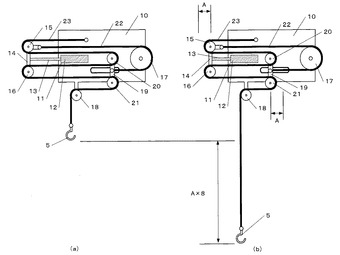
図3は、実施例2の昇降駆動部の機構図である。図3(a)は吊り具が上部にある時で、図3(b)は吊り具が下部に下降したときである。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車31を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車32を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車31と動滑車32は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート14に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車31→動滑車32→定滑車18と順に懸架され他端は吊り具5に結合されている。
【0012】
実施例2の作用を図1と図3で説明する。図3(a)の状態から吊り具に吊られた荷役物を作業者が下降させると、吊り具5が下降を始め、ロープ23が下方向に引き込まれる。ロープ23の一端がプレート10に結合されており、また、ロープ22が定滑車17を介してプレート14とプレート19を結合しているので、吊り具5が引き込まれると同時にプレート14とプレート19が同じ距離を水平方向に移動する。シリンダ11のロッド13が縮むので、プレート14が図に向かって右側に移動し、それと同時にロープ22に結合されたプレート19が図に向かって左側に移動する。シリンダ11のロッド13が縮んだ距離Aに動滑車の総数の2倍を掛け算した距離を荷役物が移動する。図3の場合は、動滑車が2個であるので、Aの4倍の距離を吊り具5と荷役物6が下降する。図3(a)の状態からシリンダ11が縮んだAの4倍の距離を吊り具5と荷役物6が下降したのが図3(b)の状態である。
【実施例3】
【0013】
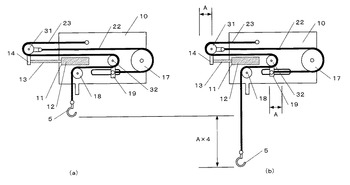
図4は、実施例3の昇降駆動部の機構図である。図4(a)は吊り具が上部にある時で、図4(b)は吊り具が下部に下降したときである。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車41と動滑車42を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車43を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車41と動滑車42と動滑車43は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート10に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車41→動滑車43→動滑車42→定滑車18と順に懸架され他端は吊り具5に結合されている。
【0014】
実施例3の作用を図1と図4で説明する。図4(a)の状態から吊り具5に吊られた荷役物6を作業者7が下降させると、吊り具5が下降を始め、ロープ23が下方向に引き込まれる。ロープ23の一端がプレート10に結合されており、また、ロープ22が定滑車17を介してプレート14とプレート19を結合しているので、吊り具5が引き込まれると同時にプレート14とプレート19が同じ距離を水平方向に移動する。シリンダ11のロッド13が縮むので、プレート14が図に向かって右側に移動し、それと同時にロープ22に結合されたプレート19が図に向かって左側に移動する。シリンダ11のロッド13が縮んだ距離Aに動滑車の総数の2倍を掛け算した距離を荷役物が移動する。図4の場合は、動滑車が3個であるので、Aの6倍の距離を吊り具5と荷役物6が下降する。図4(a)の状態からシリンダが縮んだAの6倍の距離を吊り具5と荷役物6が下降したのが図4(b)の状態である。
【実施例4】
【0015】
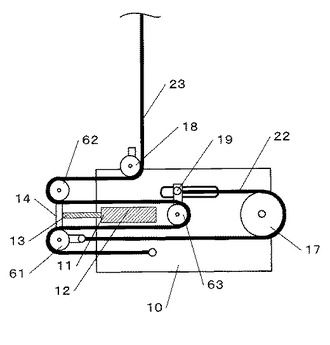
図5は、本発明の実施例4の総体図である。ポール台座51に旋回台52が係合されている。旋回台52に、第1アーム53が係合されている。第1アーム53に第2アーム54が係合されている。ポール台座51に昇降駆動部55が取り付けられている。ロープ22は、昇降駆動部55から、ポール台座51、旋回台52、第1アーム53、第2アーム54を介して、吊り具5に結合され、吊り具5に荷役物6が吊られている。作業者7が荷役物6を把持して、矢印8方向に昇降させる。また、旋回台52、第1アーム53、第2アーム52により、3次元に荷役物6を移動できる。
【0016】
図6は、実施例4の荷役物運搬機の機構図であり、図5の昇降駆動部55の部分である。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車61と動滑車62を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車63を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車61と動滑車62と動滑車63は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート10に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車61→動滑車63→動滑車62→定滑車18と順に懸架され他端は吊り具5に結合されている。図4の昇降駆動部の上下位置を変えた機構であり、シリンダ11のロッド13が縮んだ距離に動滑車の総数の2倍を掛け算した距離を荷役物が移動する。図6の場合は、動滑車が3個であるので、シリンダのロッドが伸縮した距離6倍の距離を吊り具と荷役物が昇降する。また、定滑車18を図5の旋回台52付近に取り付けても良い。また、シリンダ11を縦に置き、それに合わせて動滑車・定滑車の位置を変更しても良い。
【図面の簡単な説明】
【0017】
【図1】本発明の総体図である。(実施例1・2・3)
【図2】昇降駆動部の機構図である。(実施例1)
【図3】昇降駆動部の機構図である。(実施例2)
【図4】昇降駆動部の機構図である。(実施例3)
【図5】本発明の総体図である。(実施例4)
【図6】昇降駆動部の機構図である。(実施例4)
【符号の説明】
【0018】
1 レール
2 トロリー
3 荷役物運搬機
4 昇降駆動部
5 吊り具
6 荷役物
7 作業者
8 矢印
9 矢印
10 プレート
11 シリンダ
12 チューブ
13 ロッド
14 プレート
15 動滑車
16 動滑車
17 定滑車
18 定滑車
19 プレート
20 動滑車
21 動滑車
22 ロープ
23 ロープ
31 動滑車
32 動滑車
41 動滑車
42 動滑車
43 動滑車
51 ポール台座
52 旋回台
53 第1アーム
54 第2アーム
55 昇降駆動部
61 動滑車
62 動滑車
63 動滑車
【技術分野】
【0001】
本発明は、シリンダと複数の滑車とロープを有した荷役物運搬機の昇降駆動部に関するものである。
【背景技術】
【0002】
従来は、駆動部にモータを用いた巻き上げ機や、シリンダを用いた昇降機があった。従来例(特願平11−288603号公報)である図15は、重量が重くなり、図16はコンパクトで無いという不具合があった。
【特許文献1】特願平11−288603号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
解決しようとする問題点は、荷役物運搬機の重量が重く、コンパクトで無いという点である。
【課題を解決するための手段】
【0004】
プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車を単数又複数は有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車を単数又複数は有し、プレート19はプレート10で水平方向に可動し、全ての動滑車は水平方向に可動し、ロープ22は定滑車17を掛架しロープ23の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され複数の動滑車と定滑車18を介し他端は吊り具5に結合され、シリンダ11のロッド13が伸縮した距離に動滑車の総数の2倍を掛け算した距離を荷役物6が昇降する。
【0005】
本発明は、シリンダのロッドが伸縮した距離に動滑車の数の2倍を掛け算した距離を荷役物が昇降する事を最も主要な特徴とする。
【0006】
請求項2は実施例1で説明し、請求項3は実施例2で説明し、請求項4は実施例3で説明し、請求項1は実施例1〜4を含んでいる。
【発明の効果】
【0007】
本発明の荷役物運搬機は、重量が軽く、コンパクトであるので、手動で天井を走行させたときに作業者が軽快に走行させられるという利点がある。また、地上型の場合は、コンパクトな構成となる。
【実施例1】
【0008】
図1は、本発明の総体図である。レール1にトロリー2が係合されており、トロリー2に荷役物運搬機3が係合されている。荷役物運搬機3には昇降駆動部4と吊り具5を有し、荷役物6が吊られている。作業者7が荷役物6を把持して、矢印8方向に昇降させる。また、トロリー2により、荷役物運搬機3が矢印9方向に手動で走行する。
【0009】
図2は、実施例1の昇降駆動部の機構図である。図2(a)は吊り具が上部にある時で、図2(b)は吊り具が下部に下降したときである。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車15と動滑車16を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車20と動滑車21を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車15と動滑車16と動滑車20と動滑車21は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート14に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車15→動滑車20→動滑車16→動滑車21→定滑車18と順に懸架され他端は吊り具5に結合されている。実施例では、プレート19はプレート10に係合されているが、プレート19は、ロープ22とロープ23の張力の作用で、係合していなくても作用には支障ない。
【0010】
実施例1の作用を図1と図2で説明する。図2(a)の状態から吊り具5に吊られた荷役物6を作業者7が下降させると、吊り具5が下降を始め、ロープ23が下方向に引き込まれる。ロープ23の一端がプレート10に結合されており、また、ロープ22が定滑車17を介してプレート14とプレート19を結合しているので、吊り具5が引き込まれると同時にプレート14とプレート19が同じ距離を水平方向に移動する。シリンダ11のロッド13が縮むので、プレート14が図に向かって右側に移動し、それと同時にロープ22に結合されたプレート19が図に向かって左側に移動する。シリンダ11のロッド13が縮んだ距離Aに動滑車の総数の2倍を掛け算した距離を荷役物6が移動する。図2の場合は、動滑車が4個であるので、Aの8倍の距離を吊り具5と荷役物6が下降する。図2(a)の状態からシリンダ11が縮んだAの8倍の距離を吊り具5と荷役物6が下降したのが図2(b)の状態である。
【実施例2】
【0011】
図3は、実施例2の昇降駆動部の機構図である。図3(a)は吊り具が上部にある時で、図3(b)は吊り具が下部に下降したときである。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車31を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車32を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車31と動滑車32は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート14に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車31→動滑車32→定滑車18と順に懸架され他端は吊り具5に結合されている。
【0012】
実施例2の作用を図1と図3で説明する。図3(a)の状態から吊り具に吊られた荷役物を作業者が下降させると、吊り具5が下降を始め、ロープ23が下方向に引き込まれる。ロープ23の一端がプレート10に結合されており、また、ロープ22が定滑車17を介してプレート14とプレート19を結合しているので、吊り具5が引き込まれると同時にプレート14とプレート19が同じ距離を水平方向に移動する。シリンダ11のロッド13が縮むので、プレート14が図に向かって右側に移動し、それと同時にロープ22に結合されたプレート19が図に向かって左側に移動する。シリンダ11のロッド13が縮んだ距離Aに動滑車の総数の2倍を掛け算した距離を荷役物が移動する。図3の場合は、動滑車が2個であるので、Aの4倍の距離を吊り具5と荷役物6が下降する。図3(a)の状態からシリンダ11が縮んだAの4倍の距離を吊り具5と荷役物6が下降したのが図3(b)の状態である。
【実施例3】
【0013】
図4は、実施例3の昇降駆動部の機構図である。図4(a)は吊り具が上部にある時で、図4(b)は吊り具が下部に下降したときである。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車41と動滑車42を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車43を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車41と動滑車42と動滑車43は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート10に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車41→動滑車43→動滑車42→定滑車18と順に懸架され他端は吊り具5に結合されている。
【0014】
実施例3の作用を図1と図4で説明する。図4(a)の状態から吊り具5に吊られた荷役物6を作業者7が下降させると、吊り具5が下降を始め、ロープ23が下方向に引き込まれる。ロープ23の一端がプレート10に結合されており、また、ロープ22が定滑車17を介してプレート14とプレート19を結合しているので、吊り具5が引き込まれると同時にプレート14とプレート19が同じ距離を水平方向に移動する。シリンダ11のロッド13が縮むので、プレート14が図に向かって右側に移動し、それと同時にロープ22に結合されたプレート19が図に向かって左側に移動する。シリンダ11のロッド13が縮んだ距離Aに動滑車の総数の2倍を掛け算した距離を荷役物が移動する。図4の場合は、動滑車が3個であるので、Aの6倍の距離を吊り具5と荷役物6が下降する。図4(a)の状態からシリンダが縮んだAの6倍の距離を吊り具5と荷役物6が下降したのが図4(b)の状態である。
【実施例4】
【0015】
図5は、本発明の実施例4の総体図である。ポール台座51に旋回台52が係合されている。旋回台52に、第1アーム53が係合されている。第1アーム53に第2アーム54が係合されている。ポール台座51に昇降駆動部55が取り付けられている。ロープ22は、昇降駆動部55から、ポール台座51、旋回台52、第1アーム53、第2アーム54を介して、吊り具5に結合され、吊り具5に荷役物6が吊られている。作業者7が荷役物6を把持して、矢印8方向に昇降させる。また、旋回台52、第1アーム53、第2アーム52により、3次元に荷役物6を移動できる。
【0016】
図6は、実施例4の荷役物運搬機の機構図であり、図5の昇降駆動部55の部分である。プレート10にシリンダ11のチューブ12が取付けられている。シリンダ11のロッド13に取付けられたプレート14を有している。プレート14に支承された動滑車61と動滑車62を有している。プレート10に支承された定滑車17と定滑車18を有している。プレート19に支承された動滑車63を有している。プレート19はプレート10に係合されている。プレート19はプレート10で水平方向に可動する。動滑車61と動滑車62と動滑車63は水平方位に可動する。ロープ22は定滑車17を掛架し、ロープ22の一端はプレート10に結合され、ロープ22の他端はプレート19に結合されている。ロープ23は一端をプレート10に結合され動滑車61→動滑車63→動滑車62→定滑車18と順に懸架され他端は吊り具5に結合されている。図4の昇降駆動部の上下位置を変えた機構であり、シリンダ11のロッド13が縮んだ距離に動滑車の総数の2倍を掛け算した距離を荷役物が移動する。図6の場合は、動滑車が3個であるので、シリンダのロッドが伸縮した距離6倍の距離を吊り具と荷役物が昇降する。また、定滑車18を図5の旋回台52付近に取り付けても良い。また、シリンダ11を縦に置き、それに合わせて動滑車・定滑車の位置を変更しても良い。
【図面の簡単な説明】
【0017】
【図1】本発明の総体図である。(実施例1・2・3)
【図2】昇降駆動部の機構図である。(実施例1)
【図3】昇降駆動部の機構図である。(実施例2)
【図4】昇降駆動部の機構図である。(実施例3)
【図5】本発明の総体図である。(実施例4)
【図6】昇降駆動部の機構図である。(実施例4)
【符号の説明】
【0018】
1 レール
2 トロリー
3 荷役物運搬機
4 昇降駆動部
5 吊り具
6 荷役物
7 作業者
8 矢印
9 矢印
10 プレート
11 シリンダ
12 チューブ
13 ロッド
14 プレート
15 動滑車
16 動滑車
17 定滑車
18 定滑車
19 プレート
20 動滑車
21 動滑車
22 ロープ
23 ロープ
31 動滑車
32 動滑車
41 動滑車
42 動滑車
43 動滑車
51 ポール台座
52 旋回台
53 第1アーム
54 第2アーム
55 昇降駆動部
61 動滑車
62 動滑車
63 動滑車
【特許請求の範囲】
【請求項1】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車を単数又複数は有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車を単数又複数は有し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され複数の動滑車と定滑車18を介し他端は吊り具5に結合され、シリンダ11のロッド13が伸縮した距離に動滑車の総数の2倍を掛け算した距離を荷役物6が昇降する事を特徴とする荷役物運搬機。
【請求項2】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車15と動滑車16を有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車20と動滑車21を有し、プレート19はプレート10で水平方向に可動し、動滑車15と動滑車16と動滑車20と動滑車21は水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され動滑車15・動滑車20・動滑車16・動滑車21・定滑車18と順に懸架され他端は吊り具5に結合されおり、シリンダ11のロッド13が伸縮した距離の8倍の距離を荷役物が昇降する事を特徴とする荷役物運搬機。
【請求項3】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車31を有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車32を有し、プレート19はプレート10で水平方向に可動し、動滑車31と動滑車32は水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され動滑車31・動滑車32・定滑車18と順に懸架され他端は吊り具5に結合されおり、シリンダ11のロッド13が伸縮した距離の4倍の距離を荷役物6が昇降する事を特徴とする荷役物運搬機。
【請求項4】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車41と動滑車42を有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車43を有し、プレート19はプレート10で水平方向に可動し、動滑車41と動滑車42と動滑車43は水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され動滑車41・動滑車43・動滑車42・定滑車18と順に懸架され他端は吊り具5に結合されおり、シリンダ11のロッド13が伸縮した距離の6倍の距離を荷役物6が昇降する事を特徴とする荷役物運搬機。
【請求項1】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車を単数又複数は有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車を単数又複数は有し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され複数の動滑車と定滑車18を介し他端は吊り具5に結合され、シリンダ11のロッド13が伸縮した距離に動滑車の総数の2倍を掛け算した距離を荷役物6が昇降する事を特徴とする荷役物運搬機。
【請求項2】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車15と動滑車16を有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車20と動滑車21を有し、プレート19はプレート10で水平方向に可動し、動滑車15と動滑車16と動滑車20と動滑車21は水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され動滑車15・動滑車20・動滑車16・動滑車21・定滑車18と順に懸架され他端は吊り具5に結合されおり、シリンダ11のロッド13が伸縮した距離の8倍の距離を荷役物が昇降する事を特徴とする荷役物運搬機。
【請求項3】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車31を有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車32を有し、プレート19はプレート10で水平方向に可動し、動滑車31と動滑車32は水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され動滑車31・動滑車32・定滑車18と順に懸架され他端は吊り具5に結合されおり、シリンダ11のロッド13が伸縮した距離の4倍の距離を荷役物6が昇降する事を特徴とする荷役物運搬機。
【請求項4】
シリンダと複数の滑車とロープを有した荷役物運搬機において、プレート10にシリンダ11のチューブ12が取付けらており、シリンダ11のロッド13に取付けられたプレート14を有し、プレート14に支承された動滑車41と動滑車42を有し、プレート10に支承された定滑車17と定滑車18を有し、プレート19に支承された動滑車43を有し、プレート19はプレート10で水平方向に可動し、動滑車41と動滑車42と動滑車43は水平方向に可動し、ロープ22は定滑車17を掛架しロープ22の一端はプレート14に結合されロープ22の他端はプレート19に結合され、ロープ23は一端をプレート10に結合され動滑車41・動滑車43・動滑車42・定滑車18と順に懸架され他端は吊り具5に結合されおり、シリンダ11のロッド13が伸縮した距離の6倍の距離を荷役物6が昇降する事を特徴とする荷役物運搬機。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−227372(P2009−227372A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−72990(P2008−72990)
【出願日】平成20年3月21日(2008.3.21)
【出願人】(000100735)アイコクアルファ株式会社 (17)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年3月21日(2008.3.21)
【出願人】(000100735)アイコクアルファ株式会社 (17)
[ Back to top ]