
蓄圧式燃料噴射制御装置
【課題】圧力センサが故障している場合であっても、回転数制御を安定的に実施することができる蓄圧式燃料噴射制御装置を提供する。
【解決手段】内燃機関の負荷変動にかかわらず内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置において、圧力センサの異常を検出するセンサ異常判定部と、圧力センサを用いて検出される検出圧力と目標燃料噴射量とに基づき燃料噴射弁の操作量を決定する燃料噴射弁制御部であって、圧力センサの異常が検出されているときには検出圧力の代わりに圧力の指示値を用いて燃料噴射弁の操作量を決定する燃料噴射弁制御部と、圧力センサの異常が検出されているときに、内燃機関の現在の回転数と目標回転数との関係に応じて燃料噴射弁の操作量を補正する補正部と、を備える。
【解決手段】内燃機関の負荷変動にかかわらず内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置において、圧力センサの異常を検出するセンサ異常判定部と、圧力センサを用いて検出される検出圧力と目標燃料噴射量とに基づき燃料噴射弁の操作量を決定する燃料噴射弁制御部であって、圧力センサの異常が検出されているときには検出圧力の代わりに圧力の指示値を用いて燃料噴射弁の操作量を決定する燃料噴射弁制御部と、圧力センサの異常が検出されているときに、内燃機関の現在の回転数と目標回転数との関係に応じて燃料噴射弁の操作量を補正する補正部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関の気筒への燃料噴射を行うための蓄圧式燃料噴射制御装置に関する。特に、内燃機関の負荷変動にかかわらず内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置に関する。
【背景技術】
【0002】
従来、ディーゼルエンジン等の内燃機関の気筒への燃料噴射を行う装置として、コモンレール(蓄圧器)を備えた蓄圧式燃料噴射制御装置が広く知られている。この蓄圧式燃料噴射制御装置は、燃料を加圧して圧送する高圧ポンプと、高圧ポンプにより圧送される燃料を一時的に蓄積するコモンレールと、コモンレールに接続されて内燃機関の気筒に高圧の燃料を噴射する複数の燃料噴射弁と、燃料噴射弁や圧力制御に用いる弁等の電子制御要素の制御を行うための電子制御ユニット(ECU:Electronic Control Unit)とを備えている。
【0003】
このような蓄圧式燃料噴射制御装置において、燃料噴射量は、目標燃料噴射量とコモンレール内の圧力(以下、「レール圧」と称する。)とに基づいて得られる通電時間で、燃料噴射弁への通電を行うことによって制御される。レール圧は、高圧ポンプの吐出流量を調節することで制御したり、コモンレールから低圧側に排出する燃料流量を調節することで制御したり、あるいは、それらを併用したりすることで制御したりされている。通常、レール圧を制御する場合においては、コモンレールに設けられた圧力センサによって検出されるレール圧(以下、「検出圧力」と称する。)とレール圧の指示値(以下、「指示圧力」と称する。)との差分に基づいて閉ループ制御が実行されるようになっている。
【0004】
このような蓄圧式燃料噴射制御装置において、内燃機関の負荷変動にかかわらず内燃機関の回転数を所定の目標回転数に維持する制御が行われる場合がある。例えば、乗用車や商用車等の車両に搭載される内燃機関の蓄圧式燃料噴射制御装置の場合、内燃機関のアイドル状態において、内燃機関の回転数を所定の目標回転数に保つ制御(以下、このような制御を「回転数制御」と称する。)が実施される(例えば、特許文献1を参照)。
また、建設用機械や農業用機械等の産業用機械に搭載される内燃機関の蓄圧式燃料噴射制御装置の場合、作業中において、上記のような回転数制御が実施される(例えば、特許文献2を参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−50822号公報
【特許文献2】特開2011−12562号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、断線等によって圧力センサが故障していると判定された場合においては、圧力センサによって検出される検出圧力を用いないバックアップ運転モード(リンプホームモードと呼ぶ場合もある。)で内燃機関の運転制御が実施される場合がある。すなわち、圧力センサによる検出圧力に信頼がおけない場合であっても、内燃機関をすぐに停止させることができない場合があるために、そのような場合においては、何らかの代替値をレール圧の推定値として用いて、内燃機関の運転制御を継続するようになっている。
【0007】
しかしながら、そこで用いる代替値と実際のレール圧とに大きな乖離があると、燃料噴射弁の通電時間を求める前提となる圧力値が乖離することから、実際の燃料噴射量が目標燃料噴射量から大きくかけ離れることとなる。その結果、内燃機関を安定的に制御することが不可能となって、バックアップ運転モードで回転数制御を実施することが困難になるおそれがあった。
【0008】
より具体的には、用いるレール圧の代替値が実際のレール圧よりも大きい場合には、実際の燃料噴射量が目標燃料噴射量よりも小さくなるために、内燃機関の回転数が低下し続け、十分な出力負荷を得られなかったり、極端な場合には内燃機関が停止してしまったりするおそれがあった。また、用いるレール圧の代替値が実際のレール圧よりも小さい場合には、実際の燃料噴射量が目標燃料噴射量よりも大きくなるために、内燃機関の回転数が、目標回転数よりも大きくなったり、目標回転数まで低下したりを繰り返す不安定な状態になるおそれがあった。
【0009】
本発明の発明者は、このような問題にかんがみて、圧力センサの故障が生じている期間に回転数制御を実施する場合においては、内燃機関の現在の回転数と目標回転数との関係に応じて燃料噴射弁の操作量を補正するようにすることによりこのような問題を解決できることを見出し、本発明を完成させたものである。すなわち、本発明は、圧力センサが故障している場合であっても、回転数制御を安定的に実施することができる蓄圧式燃料噴射制御装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明によれば、複数の燃料噴射弁が接続されたコモンレールと、前記コモンレール内の圧力を検出するための圧力センサと、内燃機関の気筒への燃料噴射制御を実行する電子制御ユニットと、を備え、前記内燃機関の負荷変動にかかわらず前記内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置において、前記電子制御ユニットが、前記内燃機関の現在の回転数と前記所定の目標回転数との差分に基づき目標燃料噴射量を設定する目標燃料噴射量設定部と、前記コモンレール内の圧力の指示値を設定する指示圧力設定部と、前記圧力センサの異常を検出するセンサ異常判定部と、前記圧力センサを用いて検出される検出圧力と前記目標燃料噴射量とに基づき前記燃料噴射弁の操作量を決定する燃料噴射弁制御部であって、前記圧力センサの異常が検出されているときには前記検出圧力の代わりに前記圧力の指示値を用いて前記燃料噴射弁の操作量を決定する燃料噴射弁制御部と、前記圧力センサの異常が検出されているときに、前記内燃機関の現在の回転数と前記目標回転数との関係に応じて前記燃料噴射弁の操作量を補正する補正部と、を備えることを特徴とする蓄圧式燃料噴射制御装置が提供され、上述した問題を解決することができる。
【0011】
すなわち、本発明の蓄圧式燃料噴射制御装置によれば、圧力センサの故障時のバックアップ運転モード中において回転数制御を実行する際に、内燃機関の現在の回転数と目標回転数との関係に応じて燃料噴射弁の操作量を補正することとしているために、実際の燃料噴射量が目標燃料噴射量から大きくかけ離れることを防止することができる。したがって、バックアップ運転モード中における回転数制御を安定的に実行することができるようになる。
【0012】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記内燃機関の現在の回転数が前記目標回転数に対して所定の閾値以上小さい状態が所定時間以上継続したときに、燃料噴射量が増大するように前記燃料噴射弁の操作量を補正することが好ましい。
【0013】
このように燃料噴射弁の操作量を補正することにより、実際の燃料噴射量が目標燃料噴射量よりも小さくなることによる、内燃機関の回転数不足を防ぐことができる。
【0014】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記内燃機関の現在の回転数が、所定の振幅以上で上下動を繰り返したときに、燃料噴射量が減少するように前記燃料噴射弁の操作量を補正することが好ましい。
【0015】
このように燃料噴射弁の操作量を補正することにより、実際の燃料噴射量が目標燃料噴射量よりも大きくなることによる、内燃機関の回転数の上下動を防ぐことができる。
【0016】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記圧力の指示値を補正することにより、前記燃料噴射弁の操作量を補正することが好ましい。
【0017】
このように燃料噴射弁の操作量を補正することにより、実際のレール圧に近い圧力値に基づいて燃料噴射弁の操作量が決定されるために、実際の燃料噴射量を目標燃料噴射量に近づけることができる。
【0018】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記目標燃料噴射量を補正することにより、前記燃料噴射弁の操作量を補正することが好ましい。
【0019】
このように燃料噴射弁の操作量を補正することにより、実際の燃料噴射量と本来の目標燃料噴射量とのずれを考慮した補正後の目標燃料噴射量に基づいて燃料噴射弁の操作量が決定されるために、実際の燃料噴射量を本来の目標燃料噴射量に近づけることができる。
【図面の簡単な説明】
【0020】
【図1】第1の実施の形態にかかる蓄圧式燃料噴射制御装置の全体的構成を示す図である。
【図2】燃料噴射量特性を示す図である。
【図3】第1の実施の形態にかかる蓄圧式燃料噴射制御装置に備えられた電子制御ユニットの構成を示す図である。
【図4】回転数制御中に生じる事象を説明するためのフローチャート図である。
【図5】圧力センサ異常時の補正方法を説明するために示すフローチャート図である。
【図6】第2の実施の形態にかかる蓄圧式燃料噴射制御装置の全体的構成を示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の蓄圧式燃料噴射制御装置に関する実施の形態について、適宜図面を参照しながら具体的に説明する。
なお、それぞれの図中において、同じ符号が付されているものは、特に説明がない限り同一の構成要素を示しており、適宜説明が省略されている。
【0022】
[第1の実施の形態]
1.蓄圧式燃料噴射制御装置の全体的構成
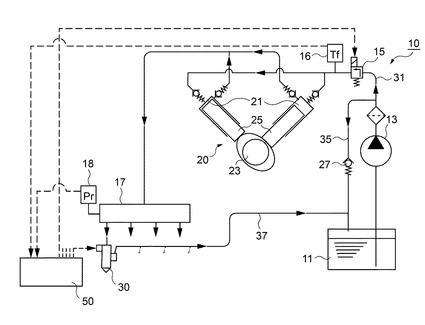
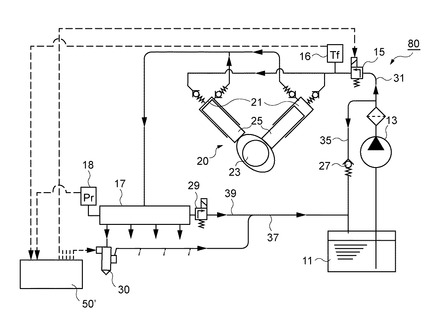
図1は、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10の全体的構成を概略的に示す図である。
本実施の形態にかかる蓄圧式燃料噴射制御装置10は、ディーゼルエンジン等の内燃機関に対して燃料を噴射するための装置として構成されている。この蓄圧式燃料噴射制御装置10は、燃料タンク11内の燃料を高圧ポンプ部20へ供給する低圧ポンプ部13と、低圧ポンプ部13により供給された燃料を加圧して圧送する高圧ポンプ部20と、高圧ポンプ部20の吐出流量を調節する電磁式流量制御弁15と、高圧ポンプ部20により圧送された燃料を蓄積するコモンレール17と、コモンレール17から供給された燃料を図示しない内燃機関の気筒に向けて噴射する複数の燃料噴射弁30と、燃料噴射弁30や電磁式流量制御弁15等の電子制御要素の制御を実行する電子制御ユニット(以下、単に「ECU」と称する。)50とを備えている。
【0023】
このうち低圧ポンプ部13は、通電制御によって出力を調節可能に構成された電動ポンプや、内燃機関の駆動力を利用して機械的に駆動するギアポンプなど、従来公知の構成の低圧ポンプを適宜用いることができる。また、高圧ポンプ部20は、内燃機関のクランクシャフトに連結されたカムシャフトの回転に伴いプランジャが上下動するように構成されたものであって、内燃機関の駆動力を利用して加圧室内の燃料を加圧して圧送するポンプとして構成されている。
【0024】
低圧ポンプ部13と高圧ポンプ部20の加圧室21とを結ぶ燃料通路31の途中には電磁式流量制御弁15が備えられている。この電磁式流量制御弁15は、ECU50によって通電制御が行われ、電流値に応じて燃料通過面積が比例的に変化する電磁比例制御弁として構成されている。電磁式流量制御弁15に供給する電流値を制御することにより、加圧室に導入する燃料の流量が調節され、ひいては高圧ポンプ部20の吐出流量が調節される。本実施の形態にかかる蓄圧式燃料噴射制御装置10において、電磁式流量制御弁15は、非通電時に燃料通過面積が最大となる、いわゆるノーマルオープン型の構造を有している。ただし、ノーマルクローズ型の構造を有する電磁式流量制御弁15であってもよい。
【0025】
また、燃料通路31には、電磁式流量制御弁15よりも上流側において、オーバーフローバルブ27を備えたリターン通路35が接続されている。このオーバーフローバルブ27によって、高圧ポンプ部20に供給される燃料の圧力が所定のフィード圧に調節される。
【0026】
コモンレール17は、適宜の容量を有する蓄圧器であって、コモンレール17には各気筒に燃料を噴射するための複数の燃料噴射弁30が接続されている。したがって、ほぼ均等な圧力の燃料が各燃料噴射弁30に供給される。このコモンレール17には、圧力センサ18が設けられている。圧力センサ18は、レール圧を検出するために用いられるセンサであって、センサ信号はECU50によって読み取り可能に構成されている。
【0027】
燃料噴射弁30は、アクチュエータとして電磁ソレノイドを備えた燃料噴射弁が用いられている。この燃料噴射弁30は、ECU50の通電制御により、開弁時期や開弁時間等が制御されるようになっている。この燃料噴射弁30からリークする燃料は、リターン通路37を介して燃料タンク11へと戻される。電磁ソレノイドを備えた燃料噴射弁30の代わりに、ピエゾ素子を備えた燃料噴射弁とすることもできる。
【0028】
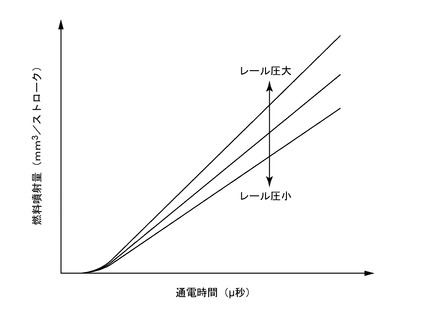
図2は、燃料噴射弁の噴射量特性を示している。この図2は、燃料噴射弁30の通電時間(μ秒)と燃料噴射量Qf(mm3/ストローク)との関係をレール圧Prailごとに示したものであって、あらかじめ実験等によって得られるものとなっている。このような噴射量特性はマップ情報としてECU50に格納され、ECU50は、現在のレール圧と目標燃料噴射量とに基づいて燃料噴射弁30への通電時間を決定するようになっている。
【0029】
2.ECU(電子制御ユニット)
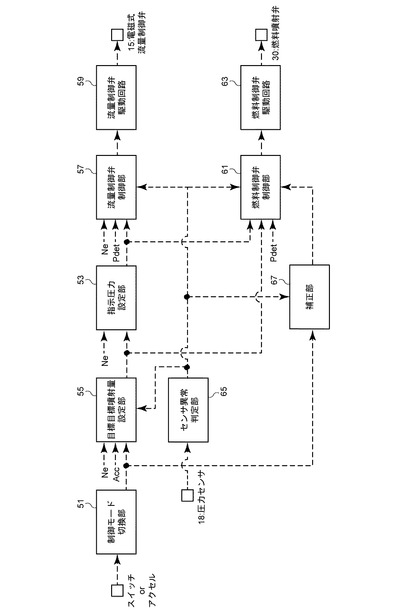
図3は、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10に備えられたECU50の構成のうち、レール圧の制御及び燃料噴射制御に関連する部分について機能的なブロックで表したものである。
【0030】
このECU50は、公知のマイクロコンピュータを中心に構成されたものであり、制御モード切換部51と、目標燃料噴射量設定部55と、指示圧力設定部53と、流量制御弁制御部57と、流量制御弁駆動回路59と、燃料噴射弁制御部61と、燃料噴射弁駆動回路63と、センサ異常判定部65と、補正部67とを主たる構成要素として備えている。具体的に、制御モード切換部51、目標燃料噴射量設定部55、流量制御弁制御部57、燃料噴射弁制御部61は、センサ異常判定部65は、マイクロコンピュータによるプログラムの実行によって実現されるものとなっている。
【0031】
また、ECU50は、RAMやROM等の記憶素子からなる図示しない記憶部を備えている。記憶部には、制御プログラム及び種々の演算マップがあらかじめ記憶されるとともに、上記した各部による演算結果等が書き込まれるようになっている。さらに、ECU50には、圧力センサ18をはじめとする種々のセンサのセンサ信号が入力されるようになっている。
【0032】
制御モード切換部51は、内燃機関の制御を、内燃機関の出力負荷を要求負荷に基づいて制御する負荷制御とするか、あるいは、内燃機関の回転数(以下、「機関回転数」と称する。)Neが所定の目標回転数Ne_tgtとなるように制御する回転数制御とするかを決定するように構成されている。
【0033】
例えば、内燃機関が、乗用車や商用車に搭載されたものである場合、運転者によってアクセルが踏まれている状態においては、アクセル操作量Accに基づいて指示圧力Ptgtや目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。一方、アクセル操作量Accがゼロであって、機関回転数Neが所定の閾値未満である場合においては、内燃機関が失火しないようにするため、機関回転数Neが所定の目標アイドル回転数Ne_tgtAで維持されるように、機関回転数Neと目標アイドル回転数Ne_tgtAとの差分ΔNeに基づいて目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。
【0034】
また、内燃機関が、建設用機械や農業用機械等の産業用機械に搭載されたものである場合、操作者によって切り換えられる操作スイッチによって、運転者の意思等に基づく出力負荷となるように内燃機関を制御するドループ制御と、機関回転数Neが所定の目標回転数Ne_tgtBに維持されるように内燃機関を制御するアイソクロナス制御とが切り換えられるようになっている。ドループ制御が選択されている場合においては、アクセル操作量Accに基づいて指示圧力Ptgtや目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。また、アイソクロナス制御が選択されている場合においては、機関回転数Neが所定の目標回転数Ne_tgtBで維持されるように、機関回転数Neと目標回転数Ne_tgtBとの差分に基づいて目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。
【0035】
センサ異常判定部65は、圧力センサ18のセンサ信号Spを用いて圧力センサ18の異常の有無を診断するように構成されている。このセンサ異常判定部65は、圧力センサ18が正常に機能しているか、すなわち、圧力センサ18によって検出される検出圧力Pdetが信頼できるものであるかを診断できるようになっていれば、具体的な演算方法は限定されない。例えば、圧力センサ18の異常の有無は、センサ信号Spが断線を示す値となっているか否かによって診断することができる。圧力センサ18の異常が生じている場合には、バックアップ運転モードに移行することとなる。
【0036】
目標燃料噴射量設定部55は、内燃機関に噴射する目標燃料噴射量Qtgtを演算により求めるように構成されている。目標燃料噴射量設定部55は、負荷制御中において、センサ異常判定部65によって、圧力センサ18に異常を生じていないと診断されている場合には、通常時噴射量マップを参照して、機関回転数Ne及びアクセル操作量Accに基づいて目標燃料噴射量Qtgtを求める。
【0037】
一方、目標燃料噴射量設定部55は、負荷制御中において、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合においては、通常時の目標燃料噴射量Qtgtよりも少ない値となるように目標燃料噴射量Qtgtを求めるようになっている。例えば、リンプホーム走行時用の噴射量マップを参照して、機関回転数Ne及びアクセル操作量Accに基づいて目標燃料噴射量Qtgtを求めるようにすることもできるし、通常時の目標燃料噴射量Qtgtに対して係数をかける等の補正を行うことによって目標燃料噴射量Qtgtを求めるようにすることもできる。
【0038】
さらに、目標燃料噴射量設定部55は、回転数制御中においては、定格運転時噴射量マップを参照して、現在の機関回転数Neと目標回転数Ne_tgtとの差分ΔNeに基づいて目標燃料噴射量Qtgtを求めるようになっている。目標回転数Ne_tgtは、内燃機関の運転状態に応じて決定され、あるいは、運転者等によって適宜設定されるものとなっている。
【0039】
指示圧力設定部53は、負荷制御中及び回転数制御中にかかわらず、また、圧力センサ18の異常の有無にかかわらず、目標燃料噴射量設定部55で設定される目標燃料噴射量Qtgt及び機関回転数Neに基づいて指示圧力Ptgtを設定するようになっている。
【0040】
流量制御弁制御部57は、負荷制御中及び回転数制御中にかかわらず、センサ異常判定部65によって、圧力センサ18に異常を生じていないと診断されている場合には、電磁式流量制御弁15の通電量Imuを、圧力センサ18によって検出される検出圧力Pdetと指示圧力Ptgtとの差分ΔPに基づいて閉ループ制御する。これにより、高圧ポンプ部20の吐出流量が調節されて、レール圧が制御される。すなわち、圧力センサ18のセンサ値を用いてレール圧制御を実行できる間は、圧力の差分ΔPに基づいて電磁式流量制御弁15の通電量Imuの制御が行われる。
【0041】
具体的に、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10において、流量制御弁制御部57は、目標燃料噴射量Qtgtと燃料噴射弁30からの燃料リーク量との和からなる基本充填量に対して、検出圧力Pdetと指示圧力Ptgtとの差分ΔPに基づくフィードバック制御量を加減算することにより、高圧ポンプ部20からの目標吐出流量を決定し、流量−電流値マップを参照して、電磁式流量制御弁15の通電量の指示値Imu_tgtを決定することとしている。このとき、燃料温度によって燃料の粘度が変化し、レール圧に影響を及ぼすことから、燃料温度によって目標吐出流量を補正するようにしてもよい。ただし、閉ループ制御の具体的な演算ロジックはこの例に限定されない。
【0042】
また、流量制御弁制御部57は、負荷制御中及び回転数制御中にかかわらず、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合には、電磁式流量制御弁15の通電量Imuを、指示圧力Ptgt、目標燃料噴射量Qtgt及び機関回転数Neに基づいて開ループ制御する。これにより、高圧ポンプ部20の吐出流量が調節されて、レール圧が制御される。
【0043】
具体的に、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10において、流量制御弁制御部57は、指示圧力Ptgt、目標燃料噴射量Qtgt及び機関回転数Neに基づいて、あらかじめ記憶部に格納された開ループ制御用吐出流量マップを参照して、高圧ポンプ部20の目標吐出流量を決定した後、流量−電流値マップを参照して、電磁式流量制御弁15の通電量の指示値Imu_tgtを決定することとしている。この開ループ制御用吐出流量マップは、あらかじめ実験やシミュレーションによって作成することができる。
【0044】
流量制御弁制御部57によって求められた電磁式流量制御弁15の通電量の指示値Imu_tgtは流量制御弁駆動回路59に送られ、さらに流量制御弁駆動回路59は、通電量の指示値Imu_tgtにしたがって電磁式流量制御弁15に対して通電を行う。これによって、高圧ポンプ部20の吐出流量が変更され、レール圧が調節される。
【0045】
燃料噴射弁制御部61は、レール圧と目標燃料噴射量Qtgtとに基づいて燃料噴射弁30の操作量として通電時間Tinjを決定して、燃料噴射弁駆動回路63に対して通電指示を行う。燃料噴射弁制御部61は、負荷制御時及び回転数制御時のいずれの場合においても、センサ異常判定部65によって、圧力センサ18に異常を生じていないと診断されている場合には、噴射量マップを参照しながら、圧力センサ18を用いて検出される検出圧力Pdetと目標燃料噴射量Qtgtとに基づいて燃料噴射弁30の通電時間Tinjを決定する。
【0046】
一方、燃料噴射弁制御部61は、負荷制御時及び回転数制御時のいずれの場合においても、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合においては、検出圧力Pdetを用いることができないことから、指示圧力Ptgtを燃料噴射弁30への通電時間Tinjの決定に用いることとしている。すなわち、この場合においては、噴射量マップを参照しながら、指示圧力Ptgtと目標燃料噴射量Qtgtとに基づいて燃料噴射弁30の通電時間Tinjを決定する。
【0047】
燃料噴射弁駆動回路63は、燃料噴射弁制御部61から送られる通電指示にしたがって燃料噴射弁30に対して通電を行う。これによって、内燃機関の気筒に対して所定の噴射量の燃料噴射が行われる。
【0048】
補正部67は、回転数制御中に、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合において、機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30の操作量としての通電時間Tinjを補正するようになっている。燃料噴射弁30の通電時間Tinjを補正するには、通電時間Tinjそのものを補正するようにしてもよいが、通電時間Tinjの決定に用いるレール圧や目標燃料噴射量Qtgtを補正するようにしてもよい。本実施の形態においては、通電時間Tinjの決定に用いるレール圧を補正する例を説明する。
【0049】
まず、補正の考え方について説明する。
回転数制御中の圧力センサ18の異常発生時において、実際のレール圧(以下、「実レール圧」と称する。)Pactが燃料噴射弁30への通電時間Tinjの計算に用いる指示圧力Ptgtよりも大きいとすると、求められる通電時間Tinjで燃料噴射弁30を操作したときには、実際の燃料噴射量が目標燃料噴射量Qtgtよりも多くなる。そのため、機関回転数Neは目標回転数Ne_tgtを上回る。このとき、回転数制御によって目標燃料噴射量Qtgtが減少するため、機関回転数Neは一旦減少するが、常に実際の燃料噴射量が目標燃料噴射量Qtgtを上回る状態となっているために、機関回転数Neを目標回転数Ne_tgtで維持しようとして燃料噴射を継続することによって、機関回転数Neは再び上昇することとなる。その結果、機関回転数Neが、ある一定の幅で増減を繰り返す状態となる。
【0050】
一方、実レール圧Pactが指示圧力Ptgtよりも小さいとすると、求められる通電時間Tinjで燃料噴射弁30を操作したときには、実際の燃料噴射量が目標燃料噴射量Qtgtよりも少なくなる。そのため、機関回転数Neは目標回転数Ne_tgtを下回る。このとき、回転数制御によって目標燃料噴射量Qtgtが増大するが、常に実際の燃料噴射量が目標燃料噴射量Qtgtを下回ることとなるために、機関回転数Neは減少し続ける状態となる。
【0051】
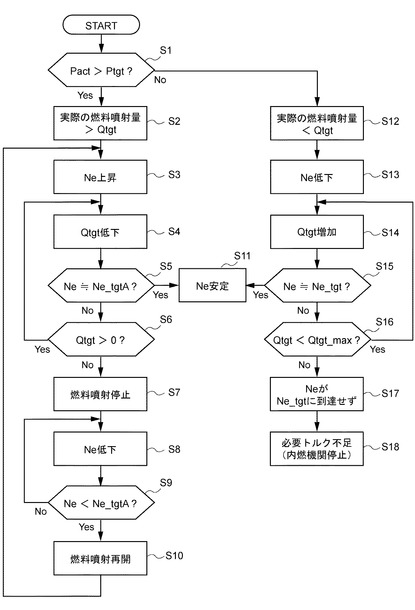
図4は、回転数制御中に生じる事象をフローチャートで示したものである。念のために言えば、このフローチャート図は、ECU50の制御を示すものではない。
まず、回転数制御の実行中において、圧力センサ18によって検出される検出圧力Pdetが指示圧力Ptgtよりも大きい場合(ステップS1でYesの場合)には、実際の燃料噴射量は目標燃料噴射量Qtgtよりも大きくなり(ステップS2)、機関回転数Neは上昇する(ステップS3)。その結果、目標燃料噴射量Qtgtが下がる(ステップS4)。
【0052】
そうすると機関回転数Neは減少するが、機関回転数Neが目標回転数Ne_tgtまで低下しない場合(ステップS5でNo判定の場合)には、目標燃料噴射量Qtgtがゼロとなっていない限り(ステップS6でYes判定の場合)、ステップS4に戻って目標燃料噴射量Qtgtが徐々に下げられる。その結果、機関回転数Neが目標回転数Ne_tgtまで低下したところで(ステップS5でYes判定の場合)、機関回転数Neが安定する(ステップS11)。
【0053】
一方、目標燃料噴射量Qtgtが下がり続けた結果、目標燃料噴射量Qtgtがゼロとなった場合(ステップS6でNo判定の場合)には、燃料噴射が停止し(ステップS7)、機関回転数Neが低下する(ステップS8)。機関回転数Neが目標回転数Ne_tgt以上となっている間は(ステップS9でNo判定の場合)、燃料噴射が停止した状態で維持される。そして、機関回転数Neが目標回転数Ne_tgtを下回ると(ステップS9でYes判定の場合)、燃料噴射が再開され(ステップS10)、機関回転数Neが上昇し始めるため、再びステップS3以降の事象が繰り返されることとなる。
【0054】
また、回転数制御の実行中において、圧力センサ18によって検出される検出圧力Pdetが指示圧力Ptgtよりも小さい場合(ステップS1でNoの場合)には、実際の燃料噴射量は目標燃料噴射量Qtgtよりも小さくなり(ステップS12)、機関回転数Neは低下する(ステップS13)。その結果、目標燃料噴射量Qtgtが増加する(ステップS14)。
【0055】
そうすると機関回転数Neは上昇するが、機関回転数Neが目標回転数Ne_tgtまで上昇しない場合(ステップS15でNo判定の場合)には、目標燃料噴射量Qtgtが、設定可能な最大値Qtgt_maxを越えていない限り(ステップS16でYes判定の場合)、ステップS14に戻って目標燃料噴射量Qtgtが徐々に増加させられる。その結果、機関回転数Neが目標回転数Ne_tgtまで上昇したところで(ステップS15でYes判定の場合)、機関回転数Neが安定する(ステップS11)。
【0056】
一方、目標燃料噴射量Qtgtが増加し続けた結果、目標燃料噴射量Qtgtが、設定可能な最大値Qtgt_maxとなった場合(ステップS16でNo判定の場合)には、機関回転数Neが目標回転数Ne_tgtに到達しない状態となって(ステップS17)、内燃機関の出力負荷が不足した状態となる。極端な場合には、内燃機関は停止することになる(ステップS18)。
【0057】
このような事象が生じることを防ぐために、本実施の形態において、補正部67は、回転数制御中の圧力センサ18の異常発生時において、機関回転数Neが目標回転数Ne_tgtよりも小さい状態が続く状態のときには、実レール圧Pactが指示圧力Ptgtよりも小さいものと推定し、燃料噴射弁30への通電時間Tinjの計算に用いるレール圧を小さくする補正を行うようになっている。また、補正部67は、回転数制御中の圧力センサ18の異常発生時において、機関回転数Neが、ある一定の幅で増減を繰り返す状態のときには、実レール圧Pactが指示圧力Ptgtよりも大きいものと推定し、燃料噴射弁30への通電時間Tinjの計算に用いるレール圧を大きくする補正を行うようになっている。
【0058】
3.制御方法
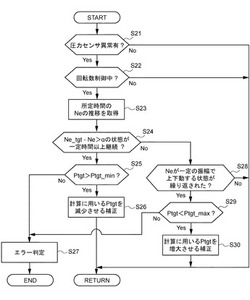
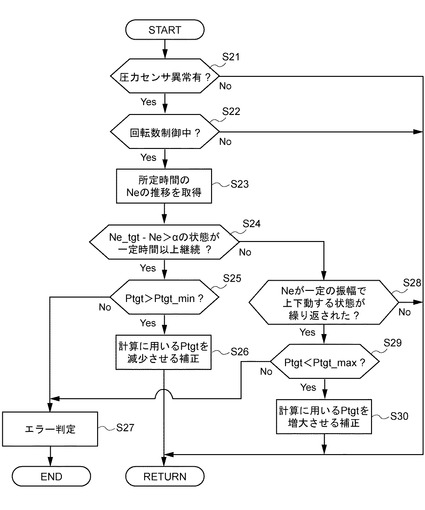
以下、本実施の形態にかかる蓄圧式燃料噴射制御装置で実施される制御方法のうち、回転数制御に関連する部分をフローチャートに沿って説明する。図5は、圧力センサ18に異常が生じている場合における制御方法(補正方法)を説明するためのフローチャート図である。
【0059】
まず、図5において、スタート後のステップS21において、ECU50は、圧力センサ18に異常を生じているか否かを判別する。圧力センサ18の異常判定方法は特に限定されるものではなく、このステップS21においては、別のルーチンで実行された圧力センサ18の異常診断によって圧力センサ18の異常を示すフラグが立てられているか否かを見ることによって判別を行うようにすることができる。圧力センサ18に異常を生じていない場合(ステップS21でNo判定の場合)には本ルーチンを終了してスタートに戻る一方、圧力センサ18に異常を生じている場合(ステップS21でYes判定の場合)には、ステップS22に進む。
【0060】
ステップS22において、ECU50は、内燃機関の制御モードが回転数制御中であるか否かを判別する。内燃機関の制御モードが回転数制御中でない場合(ステップS22でNo判定の場合)には本ルーチンを終了してスタートに戻る一方、内燃機関の制御モードが回転数制御中である場合(ステップS22でYes判定の場合)には、ステップS23に進む。
【0061】
ステップS23において、ECU50は、あらかじめ設定された所定時間内における機関回転数Neの推移を取得した後、ステップS24において、目標回転数Ne_tgtから機関回転数Neを減算した値(Ne_tgt−Ne)が所定の閾値αを越える状態が一定時間以上継続していたか否かを判別する。このステップS24は、つまり、燃料噴射量Qが目標燃料噴射量Qtgtよりも常に不足している状態を判別するステップとなっている。具体的には、燃料噴射量Qが目標燃料噴射量Qtgtよりも少ない場合には、回転数制御中において、求められる目標燃料噴射量Qtgtに基づいて燃料噴射を実行した場合であっても、機関回転数Neが減少し続けて、目標回転数Ne_tgtを大きく下回る状態が続くこととなるのである。閾値αや機関回転数Neの推移を取得する所定時間は、噴射量のズレの許容誤差等に応じてあらかじめ適宜の値に設定することができる。
【0062】
ステップS24でYes判定の場合に、ECU50はステップS25に進み、燃料噴射弁30への通電時間Tinjの計算に用いる指示圧力Ptgtの現在の値が、設定可能な最小値Ptgt_minを越えているか否かを判別する。指示圧力Ptgtの現在の値が最小値Ptgt_minを超えている場合(ステップS25でYes判定の場合)には、ステップS26に進み、ECU50は、以降の通電時間Tinjの計算に用いる指示圧力Ptgtを減少させるよう補正を実行する。例えば、あらかじめ設定された1未満の値の係数をかけるようにしてもよいし、所定の圧力分オフセットするようにしてもよい。具体的な補正の方法は特に限定されない。
【0063】
その結果、計算に用いる指示圧力Ptgtが小さくなる分、目標燃料噴射量Qtgtを実現するための通電時間Tinjが長くなり、実際の燃料噴射量Qを増量させることができる。したがって、機関回転数Neが増大して、機関回転数Neを目標回転数Ne_tgt付近で安定させることができる。
【0064】
一方、指示圧力Ptgtの現在の値が最小値Ptgt_min以下となっている場合(ステップS25でNo判定の場合)には、通電時間Tinjの計算に用いる指示圧力Ptgtをこれ以上減少させることができない程度に燃料噴射量Qを増量したにもかかわらず、機関回転数Neが目標回転数Ne_tgtを大きく下回っている状態であることから、流量制御弁15やその他の部品に故障が生じているものと推定される。したがって、ECU50は、ステップS27に進みエラー判定をし、記憶手段等に記録を残したり、運転者等に知らせたりした上で、回転数制御を終了する。この場合には、故障の原因を特定するために、別の故障診断を実行することが好ましい。
【0065】
また、上記のステップS24においてNo判定であった場合には、ステップS28に進み、ECU50は、ステップS23で取得した所定時間内において、機関回転数Neが一定の振幅以上で上下動する状態が繰り返されたか否かを判別する。このステップS28は、つまり、燃料噴射量Qが目標燃料噴射量Qtgtよりも多い状態を判別するためのステップである。具体的には、燃料噴射量Qが目標燃料噴射量Qtgtよりも多い場合には、機関回転数Neを目標回転数Ne_tgtに維持しようとして燃料噴射を実行すると、機関回転数Neが上昇することとなる一方、機関回転数Neが目標回転数Ne_tgtを上回ると、燃料噴射が停止して機関回転数Neが低下するために、機関回転数Neの上下動が繰り返される状態となるのである。判定に用いる機関回転数Neの振幅の大きさは、噴射量のズレの許容誤差等に応じてあらかじめ適宜の値に設定することができる。
【0066】
ステップS28でYes判定の場合に、ECU50はステップS29に進み、燃料噴射弁30への通電時間Tinjの計算に用いる指示圧力Ptgtの現在の値が、設定可能な最大値Ptgt_max未満であるか否かを判別する。指示圧力Ptgtの現在の値が最大値Ptgt_max未満の場合(ステップS29でYes判定の場合)には、ステップS30に進み、ECU50は、以降の通電時間Tinjの計算に用いる指示圧力Ptgtを増大させるよう補正を実行する。例えば、あらかじめ設定された1を越える値の係数をかけるようにしてもよいし、所定の圧力分オフセットするようにしてもよい。具体的な補正の方法は特に限定されない。
【0067】
その結果、計算に用いる指示圧力Ptgtが大きくなる分、目標燃料噴射量Qtgtを実現するための通電時間Tinjが短くなり、実際の燃料噴射量Qを減少させることができる。したがって、機関回転数Neの上昇が抑えられて、機関回転数Neを目標回転数Ne_tgt付近で安定させることができる。
【0068】
一方、指示圧力Ptgtの現在の値が最大値Ptgt_max以上となっている場合(ステップS29でNo判定の場合)には、通電時間Tinjの計算に用いる指示圧力Ptgtをこれ以上増大させることができない程度に燃料噴射量Qを減少したにもかかわらず、機関回転数Neが上下動を繰り返す状態であることから、流量制御弁15やその他の部品に故障が生じているものと推定される。したがって、ECU50は、ステップS27に進みエラー判定をし、記憶手段等に記録を残したり、運転者等に知らせたりした上で、回転数制御を終了する。この場合には、故障の原因を特定するために、別の故障診断を実行することが好ましい。
【0069】
4.第1の実施の形態にかかる蓄圧式燃料噴射制御装置で得られる効果
以上説明した本実施の形態にかかる蓄圧式燃料噴射制御装置10によれば、圧力センサ18の故障時のバックアップ運転モード中において回転数制御を実行する際に、現在の機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正することとしているために、通電時間Tinjが補正されて、実際の燃料噴射量Qが目標燃料噴射量Qtgtから大きくかけ離れることを防止することができる。したがって、バックアップ運転モード中における回転数制御を安定的に実行することができるようになる。
【0070】
また、本実施の形態にかかる蓄圧式燃料噴射制御装置10においては、ECU50は、現在の機関回転数Neが目標回転数Ne_tgtよりも所定の閾値αを越える状態が所定時間以上継続したときに、燃料噴射量Qが増大するように、また、現在の機関回転数Neが、所定の振幅以上で上下動を繰り返したときに、燃料噴射量Qが減少するように、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正するようにしている。したがって、実際の燃料噴射量Qと目標燃料噴射量Qtgtとのズレが小さくなって、機関回転数Neを目標回転数Ne_tgt付近で安定させることができる。
【0071】
また、本実施の形態にかかる蓄圧式燃料噴射制御装置10においては、ECU50は、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正することで、燃料噴射弁30への通電時間Tinjを補正することとしている。したがって、実レール圧Pactに近い圧力値に基づいて燃料噴射弁30への通電時間Tinjが決定され、実際の燃料噴射量Qを目標燃料噴射量Qtgtに近づけることができる。
【0072】
[第2の実施の形態]
1.蓄圧式燃料噴射制御装置の全体的構成
図6は、第2の実施の形態にかかる蓄圧式燃料噴射制御装置80の全体的構成を概略的に示す図である。
本実施の形態にかかる蓄圧式燃料噴射制御装置80は、コモンレール17に、ECU50´によって駆動制御が行われる圧力制御弁29を備えたリターン通路39が接続されているとともに、ECU50´が圧力制御弁制御部及び圧力制御弁駆動回路を備えている点で、第1の実施の形態にかかる蓄圧式燃料噴射制御装置と異なっている。以下、第1の実施の形態にかかる蓄圧式燃料噴射制御装置80と異なる点を中心に説明する。
【0073】
圧力制御弁29は、コモンレール17から低圧側に戻す燃料の流量を調節することによってレール圧を調節するための弁であって、ECU50´によって通電制御が行われ、電流値に応じて燃料通過面積が比例的に変化する電磁比例制御弁として構成されている。本実施の形態にかかる蓄圧式燃料噴射制御装置80において、圧力制御弁29は、非通電時に燃料通過面積が最大となる、いわゆるノーマルオープン型の構造を有している。ただし、ノーマルクローズ型の構造を有する圧力制御弁29であってもよい。
【0074】
本実施の形態にかかる蓄圧式燃料噴射制御装置80では、電磁式流量制御弁15を閉ループ制御することでレール圧を制御するモード、圧力制御弁29を閉ループ制御することでレール圧を制御するモード、及び電磁式流量制御弁15と圧力制御弁29とをともに閉ループ制御することでレール圧を制御するモードのいずれかのモードでレール圧制御が実施されるように構成されている。いずれのモードでレール圧制御を行うかは、内燃機関の運転領域等に応じてあらかじめ設定されている。
【0075】
ECU50´は、基本的に第1の実施の形態にかかる蓄圧式燃料噴射制御装置80のECU50と同様の構成を有しているが、圧力センサ18の異常が検出されると、電磁式流量制御弁15を全開にして高圧ポンプ部20を全吐出の状態にするとともに、圧力制御弁29への通電量Ipcを指示圧力Ptgt等に基づいて開ループ制御する。これによりレール圧が制御される。
【0076】
具体的に、圧力センサ18の異常時において、流量制御弁制御部は電磁式流量制御弁15への通電量Imuを停止して電磁式流量制御弁15を全開にする(ノーマルオープン型の場合)。また、圧力制御弁制御部は、指示圧力Ptgt等に基づいて、あらかじめ記憶部に格納された開ループ制御用排出流量マップを参照して、圧力制御弁29の通過流量を決定した後、流量−電流値マップを参照して、圧力制御弁29の通電量の指示値Ipc_tgtを決定することとしている。この開ループ制御用排出流量マップは、あらかじめ実験やシミュレーションによって作成することができる。
【0077】
そして、ECU50´は、目標燃料噴射量Qtgtと指示圧力Ptgtとに基づいて、燃料噴射弁30への通電時間Tinjを決定し、燃料噴射を実行する。このとき、内燃機関の回転数制御の実行中に、実レール圧Pactと指示圧力Ptgtとにずれが生じている場合には、機関回転数Neを目標回転数Ne_tgtに安定的に制御することができないことになる。
【0078】
そのために、ECU50´の補正部は、機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30の操作量としての通電時間Tinjを補正するようになっている。具体的な補正方法については、第1の実施の形態にかかるECU50の補正部67と同様にすることができる。
【0079】
以上説明したように、第2の実施の形態にかかる蓄圧式燃料噴射制御装置80は、電磁式流量制御弁15及び圧力制御弁29をともに備えている場合であっても、圧力センサ18の故障時のバックアップ運転モード中において回転数制御を実行する際に、現在の機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtが補正され、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10によって得られる効果と同様の効果を得ることができる。
【0080】
[他の実施の形態]
以上説明した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置は、本発明の一態様を示すものであってこの発明を限定するものではなく、それぞれの実施の形態は本発明の範囲内で任意に変更することが可能である。第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置は、例えば、以下のように変更することができる。
【0081】
(1)上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置において説明した各構成要素や、設定値、設定条件はあくまでも一例であって、任意に変更することが可能である。例えば、上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置においては、ノーマルオープン型の電磁式流量制御弁を用いているが、いわゆるノーマルクローズ型の電磁式流量制御弁を用いた場合であっても、本発明を適用することが可能である。また、各ステップにおける具体的な演算方法についても適宜変更することができる。
【0082】
(2)上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置において説明した圧力センサ18の異常発生時におけるレール圧制御方法はあくまでも一例であって、他の方法を採用することもできる。例えば、実レール圧Pactが上限値を越えたときに開弁して、その後は、比較的低い圧力(二次圧)に実レール圧Pactを維持することが可能な圧力安全弁をコモンレール17に備えている場合には、当該二次圧付近に実レール圧Pactを制御することができる。この場合においては、当該二次圧を指示圧力PtgtとしてECUによる補正制御を実行することができる。
【0083】
また、上述した第2の実施の形態にかかる蓄圧式燃料噴射制御装置においては、圧力センサ18の異常発生時に、電磁式流量制御弁15を全開にするとともに、圧力制御弁29を開ループ制御することでレール圧制御を実行することとしていたが、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10のように、圧力制御弁29を全閉状態で保持し、電磁式流量制御弁15を開ループ制御することでレール圧制御を実行するようにしてもよい。
【0084】
さらに、電磁式流量制御弁を備えておらず、圧力制御弁のみを備えている蓄圧式燃料噴射制御装置の場合には、圧力センサ18の異常発生時において、第2の実施の形態にかかる蓄圧式燃料噴射制御装置80と同様にレール圧制御を実行することができる。
上記のいずれの方法でレール圧制御を実行する場合であっても、本発明による補正制御を実行することによって、回転数制御を安定的に実行することができるようになる。
【0085】
(3)上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置においては、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正することによって燃料噴射量Qの補正を行うこととしているが、これ以外の方法によって燃料噴射量Qを補正することもできる。例えば、目標燃料噴射量Qtgtを補正するようにしてもよい。このように補正することによっても、回転数制御を安定的に実行することができるようになる。
【符号の説明】
【0086】
10:蓄圧式燃料噴射制御装置、11:燃料タンク、13:低圧ポンプ部、15:電磁式流量制御弁、17:コモンレール、18:圧力センサ、20:高圧ポンプ部、27:オーバーフローバルブ、29:圧力制御弁、30:燃料噴射弁、31:燃料通路、35:リターン通路、50・50´:電子制御ユニット、51:制御モード切換部、53:指示圧力設定部、55:目標燃料噴射量設定部、57:流量制御弁制御部、59:流量制御弁駆動回路、61:燃料噴射弁制御部、63:燃料噴射弁駆動回路、65:センサ異常判定部、67:補正部、80:蓄圧式燃料噴射制御装置
【技術分野】
【0001】
本発明は、内燃機関の気筒への燃料噴射を行うための蓄圧式燃料噴射制御装置に関する。特に、内燃機関の負荷変動にかかわらず内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置に関する。
【背景技術】
【0002】
従来、ディーゼルエンジン等の内燃機関の気筒への燃料噴射を行う装置として、コモンレール(蓄圧器)を備えた蓄圧式燃料噴射制御装置が広く知られている。この蓄圧式燃料噴射制御装置は、燃料を加圧して圧送する高圧ポンプと、高圧ポンプにより圧送される燃料を一時的に蓄積するコモンレールと、コモンレールに接続されて内燃機関の気筒に高圧の燃料を噴射する複数の燃料噴射弁と、燃料噴射弁や圧力制御に用いる弁等の電子制御要素の制御を行うための電子制御ユニット(ECU:Electronic Control Unit)とを備えている。
【0003】
このような蓄圧式燃料噴射制御装置において、燃料噴射量は、目標燃料噴射量とコモンレール内の圧力(以下、「レール圧」と称する。)とに基づいて得られる通電時間で、燃料噴射弁への通電を行うことによって制御される。レール圧は、高圧ポンプの吐出流量を調節することで制御したり、コモンレールから低圧側に排出する燃料流量を調節することで制御したり、あるいは、それらを併用したりすることで制御したりされている。通常、レール圧を制御する場合においては、コモンレールに設けられた圧力センサによって検出されるレール圧(以下、「検出圧力」と称する。)とレール圧の指示値(以下、「指示圧力」と称する。)との差分に基づいて閉ループ制御が実行されるようになっている。
【0004】
このような蓄圧式燃料噴射制御装置において、内燃機関の負荷変動にかかわらず内燃機関の回転数を所定の目標回転数に維持する制御が行われる場合がある。例えば、乗用車や商用車等の車両に搭載される内燃機関の蓄圧式燃料噴射制御装置の場合、内燃機関のアイドル状態において、内燃機関の回転数を所定の目標回転数に保つ制御(以下、このような制御を「回転数制御」と称する。)が実施される(例えば、特許文献1を参照)。
また、建設用機械や農業用機械等の産業用機械に搭載される内燃機関の蓄圧式燃料噴射制御装置の場合、作業中において、上記のような回転数制御が実施される(例えば、特許文献2を参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−50822号公報
【特許文献2】特開2011−12562号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、断線等によって圧力センサが故障していると判定された場合においては、圧力センサによって検出される検出圧力を用いないバックアップ運転モード(リンプホームモードと呼ぶ場合もある。)で内燃機関の運転制御が実施される場合がある。すなわち、圧力センサによる検出圧力に信頼がおけない場合であっても、内燃機関をすぐに停止させることができない場合があるために、そのような場合においては、何らかの代替値をレール圧の推定値として用いて、内燃機関の運転制御を継続するようになっている。
【0007】
しかしながら、そこで用いる代替値と実際のレール圧とに大きな乖離があると、燃料噴射弁の通電時間を求める前提となる圧力値が乖離することから、実際の燃料噴射量が目標燃料噴射量から大きくかけ離れることとなる。その結果、内燃機関を安定的に制御することが不可能となって、バックアップ運転モードで回転数制御を実施することが困難になるおそれがあった。
【0008】
より具体的には、用いるレール圧の代替値が実際のレール圧よりも大きい場合には、実際の燃料噴射量が目標燃料噴射量よりも小さくなるために、内燃機関の回転数が低下し続け、十分な出力負荷を得られなかったり、極端な場合には内燃機関が停止してしまったりするおそれがあった。また、用いるレール圧の代替値が実際のレール圧よりも小さい場合には、実際の燃料噴射量が目標燃料噴射量よりも大きくなるために、内燃機関の回転数が、目標回転数よりも大きくなったり、目標回転数まで低下したりを繰り返す不安定な状態になるおそれがあった。
【0009】
本発明の発明者は、このような問題にかんがみて、圧力センサの故障が生じている期間に回転数制御を実施する場合においては、内燃機関の現在の回転数と目標回転数との関係に応じて燃料噴射弁の操作量を補正するようにすることによりこのような問題を解決できることを見出し、本発明を完成させたものである。すなわち、本発明は、圧力センサが故障している場合であっても、回転数制御を安定的に実施することができる蓄圧式燃料噴射制御装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明によれば、複数の燃料噴射弁が接続されたコモンレールと、前記コモンレール内の圧力を検出するための圧力センサと、内燃機関の気筒への燃料噴射制御を実行する電子制御ユニットと、を備え、前記内燃機関の負荷変動にかかわらず前記内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置において、前記電子制御ユニットが、前記内燃機関の現在の回転数と前記所定の目標回転数との差分に基づき目標燃料噴射量を設定する目標燃料噴射量設定部と、前記コモンレール内の圧力の指示値を設定する指示圧力設定部と、前記圧力センサの異常を検出するセンサ異常判定部と、前記圧力センサを用いて検出される検出圧力と前記目標燃料噴射量とに基づき前記燃料噴射弁の操作量を決定する燃料噴射弁制御部であって、前記圧力センサの異常が検出されているときには前記検出圧力の代わりに前記圧力の指示値を用いて前記燃料噴射弁の操作量を決定する燃料噴射弁制御部と、前記圧力センサの異常が検出されているときに、前記内燃機関の現在の回転数と前記目標回転数との関係に応じて前記燃料噴射弁の操作量を補正する補正部と、を備えることを特徴とする蓄圧式燃料噴射制御装置が提供され、上述した問題を解決することができる。
【0011】
すなわち、本発明の蓄圧式燃料噴射制御装置によれば、圧力センサの故障時のバックアップ運転モード中において回転数制御を実行する際に、内燃機関の現在の回転数と目標回転数との関係に応じて燃料噴射弁の操作量を補正することとしているために、実際の燃料噴射量が目標燃料噴射量から大きくかけ離れることを防止することができる。したがって、バックアップ運転モード中における回転数制御を安定的に実行することができるようになる。
【0012】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記内燃機関の現在の回転数が前記目標回転数に対して所定の閾値以上小さい状態が所定時間以上継続したときに、燃料噴射量が増大するように前記燃料噴射弁の操作量を補正することが好ましい。
【0013】
このように燃料噴射弁の操作量を補正することにより、実際の燃料噴射量が目標燃料噴射量よりも小さくなることによる、内燃機関の回転数不足を防ぐことができる。
【0014】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記内燃機関の現在の回転数が、所定の振幅以上で上下動を繰り返したときに、燃料噴射量が減少するように前記燃料噴射弁の操作量を補正することが好ましい。
【0015】
このように燃料噴射弁の操作量を補正することにより、実際の燃料噴射量が目標燃料噴射量よりも大きくなることによる、内燃機関の回転数の上下動を防ぐことができる。
【0016】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記圧力の指示値を補正することにより、前記燃料噴射弁の操作量を補正することが好ましい。
【0017】
このように燃料噴射弁の操作量を補正することにより、実際のレール圧に近い圧力値に基づいて燃料噴射弁の操作量が決定されるために、実際の燃料噴射量を目標燃料噴射量に近づけることができる。
【0018】
また、本発明の蓄圧式燃料噴射制御装置において、前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記目標燃料噴射量を補正することにより、前記燃料噴射弁の操作量を補正することが好ましい。
【0019】
このように燃料噴射弁の操作量を補正することにより、実際の燃料噴射量と本来の目標燃料噴射量とのずれを考慮した補正後の目標燃料噴射量に基づいて燃料噴射弁の操作量が決定されるために、実際の燃料噴射量を本来の目標燃料噴射量に近づけることができる。
【図面の簡単な説明】
【0020】
【図1】第1の実施の形態にかかる蓄圧式燃料噴射制御装置の全体的構成を示す図である。
【図2】燃料噴射量特性を示す図である。
【図3】第1の実施の形態にかかる蓄圧式燃料噴射制御装置に備えられた電子制御ユニットの構成を示す図である。
【図4】回転数制御中に生じる事象を説明するためのフローチャート図である。
【図5】圧力センサ異常時の補正方法を説明するために示すフローチャート図である。
【図6】第2の実施の形態にかかる蓄圧式燃料噴射制御装置の全体的構成を示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の蓄圧式燃料噴射制御装置に関する実施の形態について、適宜図面を参照しながら具体的に説明する。
なお、それぞれの図中において、同じ符号が付されているものは、特に説明がない限り同一の構成要素を示しており、適宜説明が省略されている。
【0022】
[第1の実施の形態]
1.蓄圧式燃料噴射制御装置の全体的構成
図1は、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10の全体的構成を概略的に示す図である。
本実施の形態にかかる蓄圧式燃料噴射制御装置10は、ディーゼルエンジン等の内燃機関に対して燃料を噴射するための装置として構成されている。この蓄圧式燃料噴射制御装置10は、燃料タンク11内の燃料を高圧ポンプ部20へ供給する低圧ポンプ部13と、低圧ポンプ部13により供給された燃料を加圧して圧送する高圧ポンプ部20と、高圧ポンプ部20の吐出流量を調節する電磁式流量制御弁15と、高圧ポンプ部20により圧送された燃料を蓄積するコモンレール17と、コモンレール17から供給された燃料を図示しない内燃機関の気筒に向けて噴射する複数の燃料噴射弁30と、燃料噴射弁30や電磁式流量制御弁15等の電子制御要素の制御を実行する電子制御ユニット(以下、単に「ECU」と称する。)50とを備えている。
【0023】
このうち低圧ポンプ部13は、通電制御によって出力を調節可能に構成された電動ポンプや、内燃機関の駆動力を利用して機械的に駆動するギアポンプなど、従来公知の構成の低圧ポンプを適宜用いることができる。また、高圧ポンプ部20は、内燃機関のクランクシャフトに連結されたカムシャフトの回転に伴いプランジャが上下動するように構成されたものであって、内燃機関の駆動力を利用して加圧室内の燃料を加圧して圧送するポンプとして構成されている。
【0024】
低圧ポンプ部13と高圧ポンプ部20の加圧室21とを結ぶ燃料通路31の途中には電磁式流量制御弁15が備えられている。この電磁式流量制御弁15は、ECU50によって通電制御が行われ、電流値に応じて燃料通過面積が比例的に変化する電磁比例制御弁として構成されている。電磁式流量制御弁15に供給する電流値を制御することにより、加圧室に導入する燃料の流量が調節され、ひいては高圧ポンプ部20の吐出流量が調節される。本実施の形態にかかる蓄圧式燃料噴射制御装置10において、電磁式流量制御弁15は、非通電時に燃料通過面積が最大となる、いわゆるノーマルオープン型の構造を有している。ただし、ノーマルクローズ型の構造を有する電磁式流量制御弁15であってもよい。
【0025】
また、燃料通路31には、電磁式流量制御弁15よりも上流側において、オーバーフローバルブ27を備えたリターン通路35が接続されている。このオーバーフローバルブ27によって、高圧ポンプ部20に供給される燃料の圧力が所定のフィード圧に調節される。
【0026】
コモンレール17は、適宜の容量を有する蓄圧器であって、コモンレール17には各気筒に燃料を噴射するための複数の燃料噴射弁30が接続されている。したがって、ほぼ均等な圧力の燃料が各燃料噴射弁30に供給される。このコモンレール17には、圧力センサ18が設けられている。圧力センサ18は、レール圧を検出するために用いられるセンサであって、センサ信号はECU50によって読み取り可能に構成されている。
【0027】
燃料噴射弁30は、アクチュエータとして電磁ソレノイドを備えた燃料噴射弁が用いられている。この燃料噴射弁30は、ECU50の通電制御により、開弁時期や開弁時間等が制御されるようになっている。この燃料噴射弁30からリークする燃料は、リターン通路37を介して燃料タンク11へと戻される。電磁ソレノイドを備えた燃料噴射弁30の代わりに、ピエゾ素子を備えた燃料噴射弁とすることもできる。
【0028】
図2は、燃料噴射弁の噴射量特性を示している。この図2は、燃料噴射弁30の通電時間(μ秒)と燃料噴射量Qf(mm3/ストローク)との関係をレール圧Prailごとに示したものであって、あらかじめ実験等によって得られるものとなっている。このような噴射量特性はマップ情報としてECU50に格納され、ECU50は、現在のレール圧と目標燃料噴射量とに基づいて燃料噴射弁30への通電時間を決定するようになっている。
【0029】
2.ECU(電子制御ユニット)
図3は、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10に備えられたECU50の構成のうち、レール圧の制御及び燃料噴射制御に関連する部分について機能的なブロックで表したものである。
【0030】
このECU50は、公知のマイクロコンピュータを中心に構成されたものであり、制御モード切換部51と、目標燃料噴射量設定部55と、指示圧力設定部53と、流量制御弁制御部57と、流量制御弁駆動回路59と、燃料噴射弁制御部61と、燃料噴射弁駆動回路63と、センサ異常判定部65と、補正部67とを主たる構成要素として備えている。具体的に、制御モード切換部51、目標燃料噴射量設定部55、流量制御弁制御部57、燃料噴射弁制御部61は、センサ異常判定部65は、マイクロコンピュータによるプログラムの実行によって実現されるものとなっている。
【0031】
また、ECU50は、RAMやROM等の記憶素子からなる図示しない記憶部を備えている。記憶部には、制御プログラム及び種々の演算マップがあらかじめ記憶されるとともに、上記した各部による演算結果等が書き込まれるようになっている。さらに、ECU50には、圧力センサ18をはじめとする種々のセンサのセンサ信号が入力されるようになっている。
【0032】
制御モード切換部51は、内燃機関の制御を、内燃機関の出力負荷を要求負荷に基づいて制御する負荷制御とするか、あるいは、内燃機関の回転数(以下、「機関回転数」と称する。)Neが所定の目標回転数Ne_tgtとなるように制御する回転数制御とするかを決定するように構成されている。
【0033】
例えば、内燃機関が、乗用車や商用車に搭載されたものである場合、運転者によってアクセルが踏まれている状態においては、アクセル操作量Accに基づいて指示圧力Ptgtや目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。一方、アクセル操作量Accがゼロであって、機関回転数Neが所定の閾値未満である場合においては、内燃機関が失火しないようにするため、機関回転数Neが所定の目標アイドル回転数Ne_tgtAで維持されるように、機関回転数Neと目標アイドル回転数Ne_tgtAとの差分ΔNeに基づいて目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。
【0034】
また、内燃機関が、建設用機械や農業用機械等の産業用機械に搭載されたものである場合、操作者によって切り換えられる操作スイッチによって、運転者の意思等に基づく出力負荷となるように内燃機関を制御するドループ制御と、機関回転数Neが所定の目標回転数Ne_tgtBに維持されるように内燃機関を制御するアイソクロナス制御とが切り換えられるようになっている。ドループ制御が選択されている場合においては、アクセル操作量Accに基づいて指示圧力Ptgtや目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。また、アイソクロナス制御が選択されている場合においては、機関回転数Neが所定の目標回転数Ne_tgtBで維持されるように、機関回転数Neと目標回転数Ne_tgtBとの差分に基づいて目標燃料噴射量Qtgtが求められ、内燃機関の制御が行われる。
【0035】
センサ異常判定部65は、圧力センサ18のセンサ信号Spを用いて圧力センサ18の異常の有無を診断するように構成されている。このセンサ異常判定部65は、圧力センサ18が正常に機能しているか、すなわち、圧力センサ18によって検出される検出圧力Pdetが信頼できるものであるかを診断できるようになっていれば、具体的な演算方法は限定されない。例えば、圧力センサ18の異常の有無は、センサ信号Spが断線を示す値となっているか否かによって診断することができる。圧力センサ18の異常が生じている場合には、バックアップ運転モードに移行することとなる。
【0036】
目標燃料噴射量設定部55は、内燃機関に噴射する目標燃料噴射量Qtgtを演算により求めるように構成されている。目標燃料噴射量設定部55は、負荷制御中において、センサ異常判定部65によって、圧力センサ18に異常を生じていないと診断されている場合には、通常時噴射量マップを参照して、機関回転数Ne及びアクセル操作量Accに基づいて目標燃料噴射量Qtgtを求める。
【0037】
一方、目標燃料噴射量設定部55は、負荷制御中において、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合においては、通常時の目標燃料噴射量Qtgtよりも少ない値となるように目標燃料噴射量Qtgtを求めるようになっている。例えば、リンプホーム走行時用の噴射量マップを参照して、機関回転数Ne及びアクセル操作量Accに基づいて目標燃料噴射量Qtgtを求めるようにすることもできるし、通常時の目標燃料噴射量Qtgtに対して係数をかける等の補正を行うことによって目標燃料噴射量Qtgtを求めるようにすることもできる。
【0038】
さらに、目標燃料噴射量設定部55は、回転数制御中においては、定格運転時噴射量マップを参照して、現在の機関回転数Neと目標回転数Ne_tgtとの差分ΔNeに基づいて目標燃料噴射量Qtgtを求めるようになっている。目標回転数Ne_tgtは、内燃機関の運転状態に応じて決定され、あるいは、運転者等によって適宜設定されるものとなっている。
【0039】
指示圧力設定部53は、負荷制御中及び回転数制御中にかかわらず、また、圧力センサ18の異常の有無にかかわらず、目標燃料噴射量設定部55で設定される目標燃料噴射量Qtgt及び機関回転数Neに基づいて指示圧力Ptgtを設定するようになっている。
【0040】
流量制御弁制御部57は、負荷制御中及び回転数制御中にかかわらず、センサ異常判定部65によって、圧力センサ18に異常を生じていないと診断されている場合には、電磁式流量制御弁15の通電量Imuを、圧力センサ18によって検出される検出圧力Pdetと指示圧力Ptgtとの差分ΔPに基づいて閉ループ制御する。これにより、高圧ポンプ部20の吐出流量が調節されて、レール圧が制御される。すなわち、圧力センサ18のセンサ値を用いてレール圧制御を実行できる間は、圧力の差分ΔPに基づいて電磁式流量制御弁15の通電量Imuの制御が行われる。
【0041】
具体的に、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10において、流量制御弁制御部57は、目標燃料噴射量Qtgtと燃料噴射弁30からの燃料リーク量との和からなる基本充填量に対して、検出圧力Pdetと指示圧力Ptgtとの差分ΔPに基づくフィードバック制御量を加減算することにより、高圧ポンプ部20からの目標吐出流量を決定し、流量−電流値マップを参照して、電磁式流量制御弁15の通電量の指示値Imu_tgtを決定することとしている。このとき、燃料温度によって燃料の粘度が変化し、レール圧に影響を及ぼすことから、燃料温度によって目標吐出流量を補正するようにしてもよい。ただし、閉ループ制御の具体的な演算ロジックはこの例に限定されない。
【0042】
また、流量制御弁制御部57は、負荷制御中及び回転数制御中にかかわらず、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合には、電磁式流量制御弁15の通電量Imuを、指示圧力Ptgt、目標燃料噴射量Qtgt及び機関回転数Neに基づいて開ループ制御する。これにより、高圧ポンプ部20の吐出流量が調節されて、レール圧が制御される。
【0043】
具体的に、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10において、流量制御弁制御部57は、指示圧力Ptgt、目標燃料噴射量Qtgt及び機関回転数Neに基づいて、あらかじめ記憶部に格納された開ループ制御用吐出流量マップを参照して、高圧ポンプ部20の目標吐出流量を決定した後、流量−電流値マップを参照して、電磁式流量制御弁15の通電量の指示値Imu_tgtを決定することとしている。この開ループ制御用吐出流量マップは、あらかじめ実験やシミュレーションによって作成することができる。
【0044】
流量制御弁制御部57によって求められた電磁式流量制御弁15の通電量の指示値Imu_tgtは流量制御弁駆動回路59に送られ、さらに流量制御弁駆動回路59は、通電量の指示値Imu_tgtにしたがって電磁式流量制御弁15に対して通電を行う。これによって、高圧ポンプ部20の吐出流量が変更され、レール圧が調節される。
【0045】
燃料噴射弁制御部61は、レール圧と目標燃料噴射量Qtgtとに基づいて燃料噴射弁30の操作量として通電時間Tinjを決定して、燃料噴射弁駆動回路63に対して通電指示を行う。燃料噴射弁制御部61は、負荷制御時及び回転数制御時のいずれの場合においても、センサ異常判定部65によって、圧力センサ18に異常を生じていないと診断されている場合には、噴射量マップを参照しながら、圧力センサ18を用いて検出される検出圧力Pdetと目標燃料噴射量Qtgtとに基づいて燃料噴射弁30の通電時間Tinjを決定する。
【0046】
一方、燃料噴射弁制御部61は、負荷制御時及び回転数制御時のいずれの場合においても、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合においては、検出圧力Pdetを用いることができないことから、指示圧力Ptgtを燃料噴射弁30への通電時間Tinjの決定に用いることとしている。すなわち、この場合においては、噴射量マップを参照しながら、指示圧力Ptgtと目標燃料噴射量Qtgtとに基づいて燃料噴射弁30の通電時間Tinjを決定する。
【0047】
燃料噴射弁駆動回路63は、燃料噴射弁制御部61から送られる通電指示にしたがって燃料噴射弁30に対して通電を行う。これによって、内燃機関の気筒に対して所定の噴射量の燃料噴射が行われる。
【0048】
補正部67は、回転数制御中に、センサ異常判定部65によって、圧力センサ18に異常を生じていると診断された場合において、機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30の操作量としての通電時間Tinjを補正するようになっている。燃料噴射弁30の通電時間Tinjを補正するには、通電時間Tinjそのものを補正するようにしてもよいが、通電時間Tinjの決定に用いるレール圧や目標燃料噴射量Qtgtを補正するようにしてもよい。本実施の形態においては、通電時間Tinjの決定に用いるレール圧を補正する例を説明する。
【0049】
まず、補正の考え方について説明する。
回転数制御中の圧力センサ18の異常発生時において、実際のレール圧(以下、「実レール圧」と称する。)Pactが燃料噴射弁30への通電時間Tinjの計算に用いる指示圧力Ptgtよりも大きいとすると、求められる通電時間Tinjで燃料噴射弁30を操作したときには、実際の燃料噴射量が目標燃料噴射量Qtgtよりも多くなる。そのため、機関回転数Neは目標回転数Ne_tgtを上回る。このとき、回転数制御によって目標燃料噴射量Qtgtが減少するため、機関回転数Neは一旦減少するが、常に実際の燃料噴射量が目標燃料噴射量Qtgtを上回る状態となっているために、機関回転数Neを目標回転数Ne_tgtで維持しようとして燃料噴射を継続することによって、機関回転数Neは再び上昇することとなる。その結果、機関回転数Neが、ある一定の幅で増減を繰り返す状態となる。
【0050】
一方、実レール圧Pactが指示圧力Ptgtよりも小さいとすると、求められる通電時間Tinjで燃料噴射弁30を操作したときには、実際の燃料噴射量が目標燃料噴射量Qtgtよりも少なくなる。そのため、機関回転数Neは目標回転数Ne_tgtを下回る。このとき、回転数制御によって目標燃料噴射量Qtgtが増大するが、常に実際の燃料噴射量が目標燃料噴射量Qtgtを下回ることとなるために、機関回転数Neは減少し続ける状態となる。
【0051】
図4は、回転数制御中に生じる事象をフローチャートで示したものである。念のために言えば、このフローチャート図は、ECU50の制御を示すものではない。
まず、回転数制御の実行中において、圧力センサ18によって検出される検出圧力Pdetが指示圧力Ptgtよりも大きい場合(ステップS1でYesの場合)には、実際の燃料噴射量は目標燃料噴射量Qtgtよりも大きくなり(ステップS2)、機関回転数Neは上昇する(ステップS3)。その結果、目標燃料噴射量Qtgtが下がる(ステップS4)。
【0052】
そうすると機関回転数Neは減少するが、機関回転数Neが目標回転数Ne_tgtまで低下しない場合(ステップS5でNo判定の場合)には、目標燃料噴射量Qtgtがゼロとなっていない限り(ステップS6でYes判定の場合)、ステップS4に戻って目標燃料噴射量Qtgtが徐々に下げられる。その結果、機関回転数Neが目標回転数Ne_tgtまで低下したところで(ステップS5でYes判定の場合)、機関回転数Neが安定する(ステップS11)。
【0053】
一方、目標燃料噴射量Qtgtが下がり続けた結果、目標燃料噴射量Qtgtがゼロとなった場合(ステップS6でNo判定の場合)には、燃料噴射が停止し(ステップS7)、機関回転数Neが低下する(ステップS8)。機関回転数Neが目標回転数Ne_tgt以上となっている間は(ステップS9でNo判定の場合)、燃料噴射が停止した状態で維持される。そして、機関回転数Neが目標回転数Ne_tgtを下回ると(ステップS9でYes判定の場合)、燃料噴射が再開され(ステップS10)、機関回転数Neが上昇し始めるため、再びステップS3以降の事象が繰り返されることとなる。
【0054】
また、回転数制御の実行中において、圧力センサ18によって検出される検出圧力Pdetが指示圧力Ptgtよりも小さい場合(ステップS1でNoの場合)には、実際の燃料噴射量は目標燃料噴射量Qtgtよりも小さくなり(ステップS12)、機関回転数Neは低下する(ステップS13)。その結果、目標燃料噴射量Qtgtが増加する(ステップS14)。
【0055】
そうすると機関回転数Neは上昇するが、機関回転数Neが目標回転数Ne_tgtまで上昇しない場合(ステップS15でNo判定の場合)には、目標燃料噴射量Qtgtが、設定可能な最大値Qtgt_maxを越えていない限り(ステップS16でYes判定の場合)、ステップS14に戻って目標燃料噴射量Qtgtが徐々に増加させられる。その結果、機関回転数Neが目標回転数Ne_tgtまで上昇したところで(ステップS15でYes判定の場合)、機関回転数Neが安定する(ステップS11)。
【0056】
一方、目標燃料噴射量Qtgtが増加し続けた結果、目標燃料噴射量Qtgtが、設定可能な最大値Qtgt_maxとなった場合(ステップS16でNo判定の場合)には、機関回転数Neが目標回転数Ne_tgtに到達しない状態となって(ステップS17)、内燃機関の出力負荷が不足した状態となる。極端な場合には、内燃機関は停止することになる(ステップS18)。
【0057】
このような事象が生じることを防ぐために、本実施の形態において、補正部67は、回転数制御中の圧力センサ18の異常発生時において、機関回転数Neが目標回転数Ne_tgtよりも小さい状態が続く状態のときには、実レール圧Pactが指示圧力Ptgtよりも小さいものと推定し、燃料噴射弁30への通電時間Tinjの計算に用いるレール圧を小さくする補正を行うようになっている。また、補正部67は、回転数制御中の圧力センサ18の異常発生時において、機関回転数Neが、ある一定の幅で増減を繰り返す状態のときには、実レール圧Pactが指示圧力Ptgtよりも大きいものと推定し、燃料噴射弁30への通電時間Tinjの計算に用いるレール圧を大きくする補正を行うようになっている。
【0058】
3.制御方法
以下、本実施の形態にかかる蓄圧式燃料噴射制御装置で実施される制御方法のうち、回転数制御に関連する部分をフローチャートに沿って説明する。図5は、圧力センサ18に異常が生じている場合における制御方法(補正方法)を説明するためのフローチャート図である。
【0059】
まず、図5において、スタート後のステップS21において、ECU50は、圧力センサ18に異常を生じているか否かを判別する。圧力センサ18の異常判定方法は特に限定されるものではなく、このステップS21においては、別のルーチンで実行された圧力センサ18の異常診断によって圧力センサ18の異常を示すフラグが立てられているか否かを見ることによって判別を行うようにすることができる。圧力センサ18に異常を生じていない場合(ステップS21でNo判定の場合)には本ルーチンを終了してスタートに戻る一方、圧力センサ18に異常を生じている場合(ステップS21でYes判定の場合)には、ステップS22に進む。
【0060】
ステップS22において、ECU50は、内燃機関の制御モードが回転数制御中であるか否かを判別する。内燃機関の制御モードが回転数制御中でない場合(ステップS22でNo判定の場合)には本ルーチンを終了してスタートに戻る一方、内燃機関の制御モードが回転数制御中である場合(ステップS22でYes判定の場合)には、ステップS23に進む。
【0061】
ステップS23において、ECU50は、あらかじめ設定された所定時間内における機関回転数Neの推移を取得した後、ステップS24において、目標回転数Ne_tgtから機関回転数Neを減算した値(Ne_tgt−Ne)が所定の閾値αを越える状態が一定時間以上継続していたか否かを判別する。このステップS24は、つまり、燃料噴射量Qが目標燃料噴射量Qtgtよりも常に不足している状態を判別するステップとなっている。具体的には、燃料噴射量Qが目標燃料噴射量Qtgtよりも少ない場合には、回転数制御中において、求められる目標燃料噴射量Qtgtに基づいて燃料噴射を実行した場合であっても、機関回転数Neが減少し続けて、目標回転数Ne_tgtを大きく下回る状態が続くこととなるのである。閾値αや機関回転数Neの推移を取得する所定時間は、噴射量のズレの許容誤差等に応じてあらかじめ適宜の値に設定することができる。
【0062】
ステップS24でYes判定の場合に、ECU50はステップS25に進み、燃料噴射弁30への通電時間Tinjの計算に用いる指示圧力Ptgtの現在の値が、設定可能な最小値Ptgt_minを越えているか否かを判別する。指示圧力Ptgtの現在の値が最小値Ptgt_minを超えている場合(ステップS25でYes判定の場合)には、ステップS26に進み、ECU50は、以降の通電時間Tinjの計算に用いる指示圧力Ptgtを減少させるよう補正を実行する。例えば、あらかじめ設定された1未満の値の係数をかけるようにしてもよいし、所定の圧力分オフセットするようにしてもよい。具体的な補正の方法は特に限定されない。
【0063】
その結果、計算に用いる指示圧力Ptgtが小さくなる分、目標燃料噴射量Qtgtを実現するための通電時間Tinjが長くなり、実際の燃料噴射量Qを増量させることができる。したがって、機関回転数Neが増大して、機関回転数Neを目標回転数Ne_tgt付近で安定させることができる。
【0064】
一方、指示圧力Ptgtの現在の値が最小値Ptgt_min以下となっている場合(ステップS25でNo判定の場合)には、通電時間Tinjの計算に用いる指示圧力Ptgtをこれ以上減少させることができない程度に燃料噴射量Qを増量したにもかかわらず、機関回転数Neが目標回転数Ne_tgtを大きく下回っている状態であることから、流量制御弁15やその他の部品に故障が生じているものと推定される。したがって、ECU50は、ステップS27に進みエラー判定をし、記憶手段等に記録を残したり、運転者等に知らせたりした上で、回転数制御を終了する。この場合には、故障の原因を特定するために、別の故障診断を実行することが好ましい。
【0065】
また、上記のステップS24においてNo判定であった場合には、ステップS28に進み、ECU50は、ステップS23で取得した所定時間内において、機関回転数Neが一定の振幅以上で上下動する状態が繰り返されたか否かを判別する。このステップS28は、つまり、燃料噴射量Qが目標燃料噴射量Qtgtよりも多い状態を判別するためのステップである。具体的には、燃料噴射量Qが目標燃料噴射量Qtgtよりも多い場合には、機関回転数Neを目標回転数Ne_tgtに維持しようとして燃料噴射を実行すると、機関回転数Neが上昇することとなる一方、機関回転数Neが目標回転数Ne_tgtを上回ると、燃料噴射が停止して機関回転数Neが低下するために、機関回転数Neの上下動が繰り返される状態となるのである。判定に用いる機関回転数Neの振幅の大きさは、噴射量のズレの許容誤差等に応じてあらかじめ適宜の値に設定することができる。
【0066】
ステップS28でYes判定の場合に、ECU50はステップS29に進み、燃料噴射弁30への通電時間Tinjの計算に用いる指示圧力Ptgtの現在の値が、設定可能な最大値Ptgt_max未満であるか否かを判別する。指示圧力Ptgtの現在の値が最大値Ptgt_max未満の場合(ステップS29でYes判定の場合)には、ステップS30に進み、ECU50は、以降の通電時間Tinjの計算に用いる指示圧力Ptgtを増大させるよう補正を実行する。例えば、あらかじめ設定された1を越える値の係数をかけるようにしてもよいし、所定の圧力分オフセットするようにしてもよい。具体的な補正の方法は特に限定されない。
【0067】
その結果、計算に用いる指示圧力Ptgtが大きくなる分、目標燃料噴射量Qtgtを実現するための通電時間Tinjが短くなり、実際の燃料噴射量Qを減少させることができる。したがって、機関回転数Neの上昇が抑えられて、機関回転数Neを目標回転数Ne_tgt付近で安定させることができる。
【0068】
一方、指示圧力Ptgtの現在の値が最大値Ptgt_max以上となっている場合(ステップS29でNo判定の場合)には、通電時間Tinjの計算に用いる指示圧力Ptgtをこれ以上増大させることができない程度に燃料噴射量Qを減少したにもかかわらず、機関回転数Neが上下動を繰り返す状態であることから、流量制御弁15やその他の部品に故障が生じているものと推定される。したがって、ECU50は、ステップS27に進みエラー判定をし、記憶手段等に記録を残したり、運転者等に知らせたりした上で、回転数制御を終了する。この場合には、故障の原因を特定するために、別の故障診断を実行することが好ましい。
【0069】
4.第1の実施の形態にかかる蓄圧式燃料噴射制御装置で得られる効果
以上説明した本実施の形態にかかる蓄圧式燃料噴射制御装置10によれば、圧力センサ18の故障時のバックアップ運転モード中において回転数制御を実行する際に、現在の機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正することとしているために、通電時間Tinjが補正されて、実際の燃料噴射量Qが目標燃料噴射量Qtgtから大きくかけ離れることを防止することができる。したがって、バックアップ運転モード中における回転数制御を安定的に実行することができるようになる。
【0070】
また、本実施の形態にかかる蓄圧式燃料噴射制御装置10においては、ECU50は、現在の機関回転数Neが目標回転数Ne_tgtよりも所定の閾値αを越える状態が所定時間以上継続したときに、燃料噴射量Qが増大するように、また、現在の機関回転数Neが、所定の振幅以上で上下動を繰り返したときに、燃料噴射量Qが減少するように、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正するようにしている。したがって、実際の燃料噴射量Qと目標燃料噴射量Qtgtとのズレが小さくなって、機関回転数Neを目標回転数Ne_tgt付近で安定させることができる。
【0071】
また、本実施の形態にかかる蓄圧式燃料噴射制御装置10においては、ECU50は、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正することで、燃料噴射弁30への通電時間Tinjを補正することとしている。したがって、実レール圧Pactに近い圧力値に基づいて燃料噴射弁30への通電時間Tinjが決定され、実際の燃料噴射量Qを目標燃料噴射量Qtgtに近づけることができる。
【0072】
[第2の実施の形態]
1.蓄圧式燃料噴射制御装置の全体的構成
図6は、第2の実施の形態にかかる蓄圧式燃料噴射制御装置80の全体的構成を概略的に示す図である。
本実施の形態にかかる蓄圧式燃料噴射制御装置80は、コモンレール17に、ECU50´によって駆動制御が行われる圧力制御弁29を備えたリターン通路39が接続されているとともに、ECU50´が圧力制御弁制御部及び圧力制御弁駆動回路を備えている点で、第1の実施の形態にかかる蓄圧式燃料噴射制御装置と異なっている。以下、第1の実施の形態にかかる蓄圧式燃料噴射制御装置80と異なる点を中心に説明する。
【0073】
圧力制御弁29は、コモンレール17から低圧側に戻す燃料の流量を調節することによってレール圧を調節するための弁であって、ECU50´によって通電制御が行われ、電流値に応じて燃料通過面積が比例的に変化する電磁比例制御弁として構成されている。本実施の形態にかかる蓄圧式燃料噴射制御装置80において、圧力制御弁29は、非通電時に燃料通過面積が最大となる、いわゆるノーマルオープン型の構造を有している。ただし、ノーマルクローズ型の構造を有する圧力制御弁29であってもよい。
【0074】
本実施の形態にかかる蓄圧式燃料噴射制御装置80では、電磁式流量制御弁15を閉ループ制御することでレール圧を制御するモード、圧力制御弁29を閉ループ制御することでレール圧を制御するモード、及び電磁式流量制御弁15と圧力制御弁29とをともに閉ループ制御することでレール圧を制御するモードのいずれかのモードでレール圧制御が実施されるように構成されている。いずれのモードでレール圧制御を行うかは、内燃機関の運転領域等に応じてあらかじめ設定されている。
【0075】
ECU50´は、基本的に第1の実施の形態にかかる蓄圧式燃料噴射制御装置80のECU50と同様の構成を有しているが、圧力センサ18の異常が検出されると、電磁式流量制御弁15を全開にして高圧ポンプ部20を全吐出の状態にするとともに、圧力制御弁29への通電量Ipcを指示圧力Ptgt等に基づいて開ループ制御する。これによりレール圧が制御される。
【0076】
具体的に、圧力センサ18の異常時において、流量制御弁制御部は電磁式流量制御弁15への通電量Imuを停止して電磁式流量制御弁15を全開にする(ノーマルオープン型の場合)。また、圧力制御弁制御部は、指示圧力Ptgt等に基づいて、あらかじめ記憶部に格納された開ループ制御用排出流量マップを参照して、圧力制御弁29の通過流量を決定した後、流量−電流値マップを参照して、圧力制御弁29の通電量の指示値Ipc_tgtを決定することとしている。この開ループ制御用排出流量マップは、あらかじめ実験やシミュレーションによって作成することができる。
【0077】
そして、ECU50´は、目標燃料噴射量Qtgtと指示圧力Ptgtとに基づいて、燃料噴射弁30への通電時間Tinjを決定し、燃料噴射を実行する。このとき、内燃機関の回転数制御の実行中に、実レール圧Pactと指示圧力Ptgtとにずれが生じている場合には、機関回転数Neを目標回転数Ne_tgtに安定的に制御することができないことになる。
【0078】
そのために、ECU50´の補正部は、機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30の操作量としての通電時間Tinjを補正するようになっている。具体的な補正方法については、第1の実施の形態にかかるECU50の補正部67と同様にすることができる。
【0079】
以上説明したように、第2の実施の形態にかかる蓄圧式燃料噴射制御装置80は、電磁式流量制御弁15及び圧力制御弁29をともに備えている場合であっても、圧力センサ18の故障時のバックアップ運転モード中において回転数制御を実行する際に、現在の機関回転数Neと目標回転数Ne_tgtとの関係に応じて、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtが補正され、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10によって得られる効果と同様の効果を得ることができる。
【0080】
[他の実施の形態]
以上説明した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置は、本発明の一態様を示すものであってこの発明を限定するものではなく、それぞれの実施の形態は本発明の範囲内で任意に変更することが可能である。第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置は、例えば、以下のように変更することができる。
【0081】
(1)上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置において説明した各構成要素や、設定値、設定条件はあくまでも一例であって、任意に変更することが可能である。例えば、上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置においては、ノーマルオープン型の電磁式流量制御弁を用いているが、いわゆるノーマルクローズ型の電磁式流量制御弁を用いた場合であっても、本発明を適用することが可能である。また、各ステップにおける具体的な演算方法についても適宜変更することができる。
【0082】
(2)上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置において説明した圧力センサ18の異常発生時におけるレール圧制御方法はあくまでも一例であって、他の方法を採用することもできる。例えば、実レール圧Pactが上限値を越えたときに開弁して、その後は、比較的低い圧力(二次圧)に実レール圧Pactを維持することが可能な圧力安全弁をコモンレール17に備えている場合には、当該二次圧付近に実レール圧Pactを制御することができる。この場合においては、当該二次圧を指示圧力PtgtとしてECUによる補正制御を実行することができる。
【0083】
また、上述した第2の実施の形態にかかる蓄圧式燃料噴射制御装置においては、圧力センサ18の異常発生時に、電磁式流量制御弁15を全開にするとともに、圧力制御弁29を開ループ制御することでレール圧制御を実行することとしていたが、第1の実施の形態にかかる蓄圧式燃料噴射制御装置10のように、圧力制御弁29を全閉状態で保持し、電磁式流量制御弁15を開ループ制御することでレール圧制御を実行するようにしてもよい。
【0084】
さらに、電磁式流量制御弁を備えておらず、圧力制御弁のみを備えている蓄圧式燃料噴射制御装置の場合には、圧力センサ18の異常発生時において、第2の実施の形態にかかる蓄圧式燃料噴射制御装置80と同様にレール圧制御を実行することができる。
上記のいずれの方法でレール圧制御を実行する場合であっても、本発明による補正制御を実行することによって、回転数制御を安定的に実行することができるようになる。
【0085】
(3)上述した第1及び第2の実施の形態にかかる蓄圧式燃料噴射制御装置においては、燃料噴射弁30への通電時間Tinjの決定に用いる指示圧力Ptgtを補正することによって燃料噴射量Qの補正を行うこととしているが、これ以外の方法によって燃料噴射量Qを補正することもできる。例えば、目標燃料噴射量Qtgtを補正するようにしてもよい。このように補正することによっても、回転数制御を安定的に実行することができるようになる。
【符号の説明】
【0086】
10:蓄圧式燃料噴射制御装置、11:燃料タンク、13:低圧ポンプ部、15:電磁式流量制御弁、17:コモンレール、18:圧力センサ、20:高圧ポンプ部、27:オーバーフローバルブ、29:圧力制御弁、30:燃料噴射弁、31:燃料通路、35:リターン通路、50・50´:電子制御ユニット、51:制御モード切換部、53:指示圧力設定部、55:目標燃料噴射量設定部、57:流量制御弁制御部、59:流量制御弁駆動回路、61:燃料噴射弁制御部、63:燃料噴射弁駆動回路、65:センサ異常判定部、67:補正部、80:蓄圧式燃料噴射制御装置
【特許請求の範囲】
【請求項1】
複数の燃料噴射弁が接続されたコモンレールと、前記コモンレール内の圧力を検出するための圧力センサと、内燃機関の気筒への燃料噴射制御を実行する電子制御ユニットと、を備え、前記内燃機関の負荷変動にかかわらず前記内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置において、
前記電子制御ユニットが、
前記内燃機関の現在の回転数と前記所定の目標回転数との差分に基づき目標燃料噴射量を設定する目標燃料噴射量設定部と、
前記コモンレール内の圧力の指示値を設定する指示圧力設定部と、
前記圧力センサの異常を検出するセンサ異常判定部と、
前記圧力センサを用いて検出される検出圧力と前記目標燃料噴射量とに基づき前記燃料噴射弁の操作量を決定する燃料噴射弁制御部であって、前記圧力センサの異常が検出されているときには前記検出圧力の代わりに前記圧力の指示値を用いて前記燃料噴射弁の操作量を決定する燃料噴射弁制御部と、
前記圧力センサの異常が検出されているときに、前記内燃機関の現在の回転数と前記目標回転数との関係に応じて前記燃料噴射弁の操作量を補正する補正部と、
を備えることを特徴とする蓄圧式燃料噴射制御装置。
【請求項2】
前記補正部は、前記内燃機関の現在の回転数が前記目標回転数に対して所定の閾値以上小さい状態が所定時間以上継続したときに、燃料噴射量が増大するように前記燃料噴射弁の操作量を補正することを特徴とする請求項1に記載の蓄圧式燃料噴射制御装置。
【請求項3】
前記補正部は、前記内燃機関の現在の回転数が、所定の振幅以上で上下動を繰り返したときに、燃料噴射量が減少するように前記燃料噴射弁の操作量を補正することを特徴とする請求項1又は2に記載の蓄圧式燃料噴射制御装置。
【請求項4】
前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記圧力の指示値を補正することにより、前記燃料噴射弁の操作量を補正することを特徴とする請求項1〜3のいずれか一項に記載の蓄圧式燃料噴射制御装置。
【請求項5】
前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記目標燃料噴射量を補正することにより、前記燃料噴射弁の操作量を補正することを特徴とする請求項1〜3のいずれか一項に記載の蓄圧式燃料噴射制御装置。
【請求項1】
複数の燃料噴射弁が接続されたコモンレールと、前記コモンレール内の圧力を検出するための圧力センサと、内燃機関の気筒への燃料噴射制御を実行する電子制御ユニットと、を備え、前記内燃機関の負荷変動にかかわらず前記内燃機関の回転数を所定の目標回転数に維持する制御を実行可能な蓄圧式燃料噴射制御装置において、
前記電子制御ユニットが、
前記内燃機関の現在の回転数と前記所定の目標回転数との差分に基づき目標燃料噴射量を設定する目標燃料噴射量設定部と、
前記コモンレール内の圧力の指示値を設定する指示圧力設定部と、
前記圧力センサの異常を検出するセンサ異常判定部と、
前記圧力センサを用いて検出される検出圧力と前記目標燃料噴射量とに基づき前記燃料噴射弁の操作量を決定する燃料噴射弁制御部であって、前記圧力センサの異常が検出されているときには前記検出圧力の代わりに前記圧力の指示値を用いて前記燃料噴射弁の操作量を決定する燃料噴射弁制御部と、
前記圧力センサの異常が検出されているときに、前記内燃機関の現在の回転数と前記目標回転数との関係に応じて前記燃料噴射弁の操作量を補正する補正部と、
を備えることを特徴とする蓄圧式燃料噴射制御装置。
【請求項2】
前記補正部は、前記内燃機関の現在の回転数が前記目標回転数に対して所定の閾値以上小さい状態が所定時間以上継続したときに、燃料噴射量が増大するように前記燃料噴射弁の操作量を補正することを特徴とする請求項1に記載の蓄圧式燃料噴射制御装置。
【請求項3】
前記補正部は、前記内燃機関の現在の回転数が、所定の振幅以上で上下動を繰り返したときに、燃料噴射量が減少するように前記燃料噴射弁の操作量を補正することを特徴とする請求項1又は2に記載の蓄圧式燃料噴射制御装置。
【請求項4】
前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記圧力の指示値を補正することにより、前記燃料噴射弁の操作量を補正することを特徴とする請求項1〜3のいずれか一項に記載の蓄圧式燃料噴射制御装置。
【請求項5】
前記補正部は、前記燃料噴射弁の操作量の決定に用いる前記目標燃料噴射量を補正することにより、前記燃料噴射弁の操作量を補正することを特徴とする請求項1〜3のいずれか一項に記載の蓄圧式燃料噴射制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−108445(P2013−108445A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254566(P2011−254566)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
[ Back to top ]