
視点変換装置及び視点変換方法
【課題】視点変換のための演算処理速度が高速であり、また、視点変換途中に映像をメモリに保持する必要をなくす。
【解決手段】変換パラメータ演算部106は、カメラパラメータと仮想カメラパラメータとに基づいて、カメラ101により実視点から見た画像平面上の画像座標で表される第1の点から所定の基準平面上の点への投影を表す第1の式と、基準平面上の点から仮想撮像装置から見た画像座標で表される第2の点への投影を表す第2の式とを求め、更に第1及び第2の式により第1の点から第2の点への投影を表す第3の式を求め、その第3の式からカメラ101の撮像映像信号を仮想カメラの仮想撮像映像信号へ変換するための変換行列を演算する。視点変換部103は、カメラ101の撮像映像信号に対して、上記変換行列を用いた視点変換のための演算処理を行う。
【解決手段】変換パラメータ演算部106は、カメラパラメータと仮想カメラパラメータとに基づいて、カメラ101により実視点から見た画像平面上の画像座標で表される第1の点から所定の基準平面上の点への投影を表す第1の式と、基準平面上の点から仮想撮像装置から見た画像座標で表される第2の点への投影を表す第2の式とを求め、更に第1及び第2の式により第1の点から第2の点への投影を表す第3の式を求め、その第3の式からカメラ101の撮像映像信号を仮想カメラの仮想撮像映像信号へ変換するための変換行列を演算する。視点変換部103は、カメラ101の撮像映像信号に対して、上記変換行列を用いた視点変換のための演算処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は視点変換装置及び視点変換方法に係り、特に撮像装置により実視点で撮像された撮像映像を任意の仮想視点から見た映像に変換する視点変換を行う視点変換装置及び視点変換方法に関する。
【背景技術】
【0002】
従来、撮像装置により撮像された実視点の撮像映像を任意の仮想視点から見た映像に視点変換する視点変換装置が知られている(例えば、特許文献1参照)。この視点変換装置においては、カメラで撮像した映像から世界座標への投影映像データを一度生成してメモリに保持し、メモリに保持した世界座標への投影映像データから所定の演算式により任意の視点に設置した仮想カメラの映像を演算生成する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】国際公開第00/07373号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来の視点変換装置では、一旦、世界座標への投影映像データを生成し、その投影映像データを用いて任意視点の仮想カメラの映像を生成するため、世界座標への投影映像データを保持するためのメモリが必要であることと、変換のための演算処理に時間がかかることが課題である。
【0005】
本発明は、上記の点に鑑みなされたもので、視点変換のための演算処理時間が短くて済み、また、視点変換途中に映像をメモリに保持する必要の無い視点変換装置及び視点変換方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の視点変換装置は、任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータを記憶するカメラパラメータ記憶手段と、3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータを記憶する仮想カメラパラメータ記憶手段と、カメラパラメータと仮想カメラパラメータとに基づいて、仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と仮想視点から見た画像平面上に定めた4つの点の画像座標とに基づいて、撮像装置の撮像映像信号を仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する変換パラメータ演算手段と、撮像装置の実視点から見た撮像映像信号に対して、変換行列を用いた視点変換のための演算処理を行って、仮想撮像装置の仮想撮像映像信号を生成する視点変換手段とを有することを特徴とする。
【0007】
また、上記の目的を達成するため、本発明の視点変換装置は、仮想カメラパラメータから得られる仮想撮像装置の仮想撮像領域の4つの頂点を、撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する変換領域指示線生成手段と、変換領域指示線生成手段により生成された指示線と、撮像装置の実視点から見た撮像映像信号との重畳信号を生成して出力する重畳手段と、視点変換手段から出力される仮想撮像映像信号と、重畳手段から出力される重畳信号との一方を選択する映像切替手段とを更に有することを特徴とする。
【0008】
また、上記の目的を達成するため、本発明の視点変換方法は、任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータと、3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータとに基づいて、仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と仮想視点から見た画像平面上に定めた4つの点の画像座標とに基づいて、撮像装置の撮像映像信号を仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する第1のステップと、撮像装置の実視点から見た撮像映像信号に対して、変換行列を用いた視点変換のための演算処理を行って、仮想撮像装置の仮想撮像映像信号を生成する第2のステップとを含むことを特徴とする。
【0009】
また、上記の目的を達成するため、本発明の視点変換方法は、仮想カメラパラメータから得られる仮想撮像装置の仮想撮像領域の4つの頂点を、撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する第3のステップと、第3のステップにより生成された指示線と、撮像装置の実視点から見た撮像映像信号との重畳信号を生成して出力する第4のステップと、第2のステップにより得られる仮想撮像映像信号と、第4のステップにより得られる重畳信号との一方を選択する第5のステップとを更に含むことを特徴とする。
【発明の効果】
【0010】
本発明によれば、撮像装置の実視点から見た撮像映像信号から世界座標の映像を生成する必要がないため、従来に比べてメモリ容量を低減でき、また、視点変換の演算処理時間を短縮することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の視点変換装置の第1の実施の形態のブロック図である。
【図2】カメラの映像空間と基準平面の座標系を説明するための図である。
【図3】カメラパラメータの一例を説明するための図である。
【図4】仮想カメラパラメータの一例を説明するための図である。
【図5】本発明の視点変換装置及び視点変換方法の第1の実施の形態の動作を説明するためのフローチャートである。
【図6】本発明の視点変換装置の第3の実施の形態のブロック図である。
【図7】本発明の視点変換装置及び視点変換方法の第3の実施の形態における変換領域を説明するための図である。
【図8】仮想撮像領域の一例を説明するための図である。
【図9】カメラの映像空間とそこに投影された仮想カメラの仮想撮像領域を説明するための図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0013】
(第1の実施の形態)
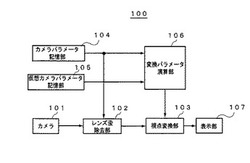
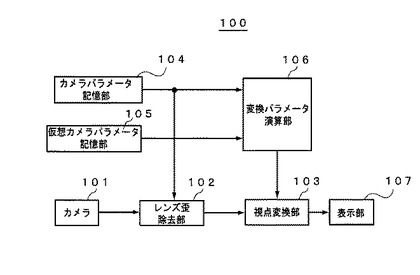
図1は、本発明になる視点変換装置の第1の実施の形態のブロック図を示す。同図に示すように、第1の実施の形態の視点変換装置100は、撮像装置であるカメラ101により撮像された撮像映像信号に対して、カメラ101のレンズ歪みを除去するレンズ歪除去部102と、レンズ歪み除去部102からの撮像映像信号に対して任意視点の視点変換を行って、その視点変換後の映像信号を表示部107へ出力する視点変換部103と、カメラパラメータ記憶部104と、仮想カメラパラメータ記憶部105と、変換パラメータ演算部106とより構成される。
【0014】
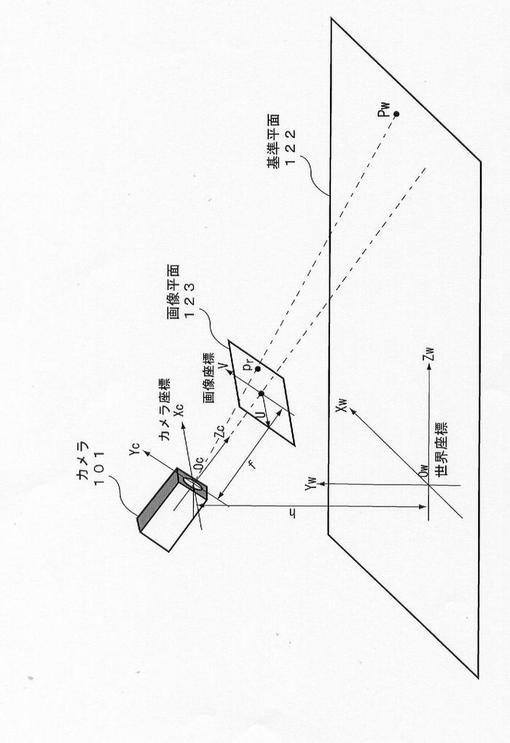
ここで、まず、本実施の形態で使用する座標軸について図2と共に説明する。図2は、カメラ101の映像空間と基準平面の座標系を説明するための図を示す。図2において、世界座標は、カメラ101の光軸の基準平面122に投影した方向をZw軸とし、Zw軸に垂直で、かつ、基準平面122上の方向をXw軸とし、基準平面122の法線方向をYw軸とする。また、世界座標の原点Owは、カメラ101の主点から下ろした垂線と基準平面122の交点とする。
【0015】
また、カメラ座標は、カメラ101をピンホールカメラモデルで近似したときのピンホールを原点Ocとし、カメラ101の光軸方向をZc軸とし、Zc軸に垂直で、かつ、後述の画像座標の縦方向をYc軸とし、Zc軸及びYc軸にそれぞれ直交する方向をXc軸とする。また、画像座標は、コンピュータに取り込まれるときの座標であり、画像平面123の横方向をU軸とし、縦方向をV軸とする。なお、カメラ101は基準平面122に対して高さhだけ上方に位置する。また、画像平面123はカメラ101の主点から距離f(f:焦点距離)の位置にある。
【0016】
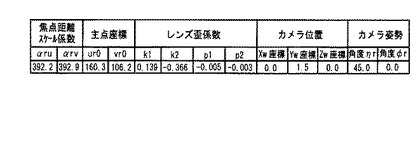
図1に戻って説明する。カメラパラメータ記憶部104は、カメラ101の特性、位置、及び姿勢からなるカメラパラメータを予め記憶している。このカメラパラメータは、具体的には、図3に示すように、カメラ101の焦点距離fとU軸方向、V軸方向の各画素サイズとの積である焦点スケール係数αruとαrv、画像平面(図2の123)とカメラ101の光軸との交点である主点のU軸方向とV軸方向の座標ur0とvr0、カメラレンズの半径方向のレンズ歪係数k1,k2、円周方向のレンズ歪係数p1,p2、世界座標で表したカメラ101の位置を示すXw座標、Yw座標、Zw座標、カメラ101の姿勢を表すXw軸まわりの回転角度ηrとYw軸まわりの回転角度φrとからなる。なお、Zw軸まわりの回転はないものとする。焦点距離スケール係数αru,αrvは、焦点距離を画素単位で表したもので、変換する点を画素単位に変換する。
【0017】
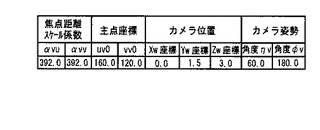
また、図1の仮想カメラパラメータ記憶部105は、3次元空間上の任意の仮想視点に配置された仮想カメラの特性、位置、及び姿勢からなる仮想カメラパラメータを予め記憶している。この仮想カメラパラメータは、具体的には、図4に示すように、仮想カメラの焦点距離とU軸方向、V軸方向の各画素サイズとの積である焦点スケール係数αvuとαvv、画像平面(図2の123)と仮想カメラの光軸との交点である主点のU軸方向とV軸方向の座標uv0とvv0、世界座標で表した仮想カメラの位置を示すXw座標、Yw座標、Zw座標、仮想カメラの姿勢を表すXw軸まわりの回転角度ηvとYw軸まわりの回転角度φvとからなる。なお、Zw軸まわりの回転はないものとする。焦点距離スケール係数αvu,αvuは、焦点距離を画素単位で表したもので、変換する点を画素単位に変換する。
【0018】
変換パラメータ演算部106は、カメラパラメータ記憶部104から読み出されたカメラパラメータと、仮想カメラパラメータ記憶部105から読み出された仮想カメラパラメータとから、カメラ101の図2に示した画像平面123上の点prを、仮想カメラの画像座標で表される点pvに変換する変換行列(変換パラメータ)を後述する演算式により予め求めておく。
【0019】
視点変換部103は、レンズ歪除去部102からの撮像映像信号に対して、変換パラメータ演算部106で求められた変換行列を用いて任意視点に視点変換された映像信号を生成して表示部107へ出力する。
【0020】
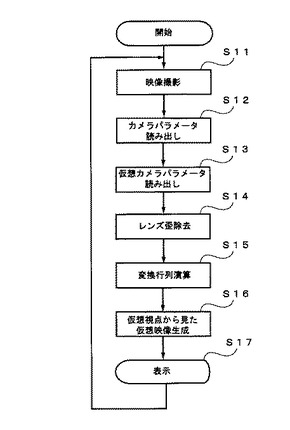
次に、本実施の形態の動作について、図5のフローチャート等を併せ参照して説明する。
【0021】
まず、カメラ101が実視点での映像撮影を行う(ステップS11)。これにより、カメラ101は、実視点から見た撮像映像信号をレンズ歪み除去部102へ出力する。続いて、カメラパラメータ記憶部104が、カメラパラメータを読み出す(ステップS12)。このカメラパラメータは、図3に示したように、カメラ101の特性(焦点距離スケール係数αru,αvu、主点座標ur0,vr0、レンズ歪係数k1,k2,p1,p2)、カメラ101の位置及びカメラ101の姿勢を示すパラメータである。
【0022】
続いて、仮想カメラパラメータ記憶部105が、図4に示した仮想カメラパラメータを読み出す(ステップS13)。この仮想カメラパラメータは、図4に示したように、仮想カメラの特性(焦点距離スケール係数αvu,αvv、主点座標uv0,vv0)、仮想カメラの位置及び仮想カメラの姿勢を示すパラメータである。
【0023】
次に、レンズ歪除去部102は、カメラパラメータ記憶部104に記憶されている半径方向のレンズ歪係数k1及びk2と、円周方向のレンズ歪係数p1及びp2とを使用して、カメラ101から供給される撮像映像信号に含まれるレンズ歪を除去する(ステップS14)。レンズ歪の除去された撮像映像信号は視点変換部103へ供給される。
【0024】
続いて、変換パラメータ演算部106は、カメラパラメータと仮想カメラパラメータとから、カメラ101の図2に示した画像平面123上の点prを、仮想カメラの画像座標で表される点pvに変換する変換行列(変換パラメータ)を演算する(ステップS15)。
【0025】
この変換パラメータ演算部106による変換行列の演算動作について詳細に説明する。まず、図2に示した基準平面122上の点Pwとカメラ101のカメラ座標の原点Ocとを結ぶ直線上にあり、かつ、画像平面123上にある点をprとしたとき、点Pwと点prとの間には次式の関係がある。なお、以下の式において、Pwとprは、それらの点の位置を示す座標を示す。
【0026】
sr・pr=Ar(Rr・Pw+Tr) (1)
ただし、(1)式中、srは画像座標における距離スケール係数、Arはカメラ101の内部パラメータ行列、Rrはカメラ101の回転行列、Trはカメラ101の移動行列を示す。上記の(1)式は基準平面122上の点Pwからカメラ101から見た画像座標で表される点prへの投影を表す式である。ここで、距離スケール係数srは変換する点Pwと画像平面123との距離によって、画像平面123上への投影の大きさを調整する係数で、距離が遠ければ小さく、距離が近ければ大きくする。また、上記のカメラ101の内部パラメータ行列Ar、カメラ101の回転行列Rr、カメラ101の移動行列Trは次式で表される。
【0027】
【数1】

(1)式を変形すると、カメラ101の画像平面123で表される点prから基準平面122上の点Pwへの投影を表す次式が得られる。
【0028】
Pw=Rr-1・Ar-1・sr・pr−Rr-1・Tr (2)
一方、基準平面122上の点Pwから仮想カメラから見た画像座標で表される点pvへの投影を表す式は(3)式で表される。
【0029】
sv・pv=Av(Rv・Pw+Tv) (3)
ただし、(3)式中、svは画像座標における距離スケール係数、Avは仮想カメラの内部パラメータ行列、Rvは仮想カメラの回転行列、Tvは仮想カメラの移動行列を示す。ここで、距離スケール係数svは変換する点Pwと仮想カメラから見た画像平面との距離によって、その画像平面上への投影の大きさを調整する係数で、距離が遠ければ小さく、距離が近ければ大きくする。また、上記の仮想カメラの内部パラメータ行列Av、仮想カメラの回転行列Rv、仮想カメラの移動行列Tvは次式で表される。
【0030】
【数2】
ここで、(3)式のPwに(2)式を代入すると、カメラ101により実視点で撮像した画像平面123上の画像座標で表される点prから、仮想カメラにより仮想視点から見た画像座標で表される点pvへの投影を表す次の(4)式が得られる。
【0031】
sv・pv=Av・Rv・Rr-1・Ar-1・sr・pr+Av(Tv−Rv・Rr-1・Tr) (4)
(4)式中の「Av・Rv・Rr-1・Ar-1」と「Av(Tv−Rv・Rr-1・Tr)」とがステップS15で求められる変換行列である。そこで、変換パラメータ演算部106は、上記の変換行列「Av・Rv・Rr-1・Ar-1」と「Av(Tv−Rv・Rr-1・Tr)」とを予め演算し、この変換行列を視点変換部103に供給する。
【0032】
次に、視点変換部103は、レンズ歪除去部102によりレンズ歪が除去されたカメラ101の撮像映像信号に対して、変換パラメータ演算部106から供給される上記の変換行列を用いて(4)式に基づく演算を行って仮想視点から見た仮想撮像映像信号を生成する(ステップS16)。
【0033】
すなわち、視点変換部103は、(4)式の右辺における変換行列は変換パラメータ演算部106から取得し、(4)式の右辺におけるprの値として、レンズ歪が除去されたカメラ101の撮像映像信号の画像座標で表される点prの値を代入し、かつ、距離スケール係数srの値として変換する点Pwと画像平面123との距離に応じた値を代入することで、(4)式の左辺のsv・pvで表される仮想視点から見た仮想撮像映像信号を生成することができる。このとき、演算されたsv・pvのうち、距離スケール係数svを除算することで、基準平面122上の点Pwから仮想カメラから見た画像座標で表される点pvのみを演算することもできる。
【0034】
そして、表示部107は、この仮想視点から見た仮想撮像映像信号(すなわち、仮想カメラの映像)を表示する(ステップS17)。以降、ステップS11に戻り、ステップS11〜S17の処理を繰り返す。
【0035】
なお、ステップS16における(4)式の演算において、仮想カメラの画像座標がある点において、カメラ101の画像座標で表される点prから仮想カメラの画像座標に変換された点pvが存在しない場合は、周辺の存在する点から補間する。
【0036】
このように、本実施の形態の視点変換装置100によれば、視点変換部103が実視点から見た撮像映像信号に対して、変換パラメータ演算部106により演算された変換行列を用いて(4)式の演算を行うことで仮想視点から見た仮想撮像映像信号を生成するようにしたため、基準平面122上の世界座標の点Pwの映像の算出が不要である。一方、従来の視点変換装置では実視点から見た撮像映像信号に対して世界座標上の映像を画素単位で一度生成してメモリに記憶しておき、そのメモリから読み出した世界座標上の映像から仮想カメラの映像を生成していた。
【0037】
従って、本実施の形態の視点変換装置100によれば、世界座標の点Pwの映像の算出が不要であるため、従来の視点変換装置で必要であった世界座標の点Pwの映像を記憶するための大容量のメモリが不要であり、その結果、メモリ容量が低減でき、かつ、視点変換のための演算処理時間を短縮することができる。
【0038】
(第2の実施の形態)
次に、本発明の視点変換装置及び視点変換方法の第2の実施の形態について説明する。
【0039】
本実施の形態の視点変換装置の全体構成は、図1のブロック図に示した第1の実施の形態の視点変換装置100と同様構成である。第2の実施の形態の視点変換装置は、第1の実施の形態の視点変換装置100と比較し、変換パラメータ演算部106における変換行列の演算方法が異なる。
【0040】
第2の実施の形態の視点変換装置の変換パラメータ演算部106においては、仮想カメラの画像座標で表される相異なる4つの点pv0,pv1,pv2,pv3から、それぞれの点に対応する実視点のカメラ101の画像座標で表される4つの点pr0,pr1,pr2,pr3を求め、それら4つの点pr0,pr1,pr2,pr3に基づいて、カメラ101の画像座標で表される点prから仮想カメラの画像座標で表される点pvへの変換行列を求める。なお、仮想カメラの画像座標で表される上記の4つの点の内の1つは、仮想カメラの画像座標の原点を含んでもよい。
【0041】
次に、第2の実施の形態の視点変換装置の変換パラメータ演算部106における変換行列生成方法について詳細に説明する。仮想カメラの画像座標で表される点pvから、基準平面122上の点Pwへの投影を表す式は、前記(3)式を変形することにより(5)式のように表すことができる。
【0042】
Pw=Rv-1・Av-1・sv・pv−Rv-1・Tv (5)
この(5)式と前記(1)式とにより、基準平面122上に投影した点Pwを、実視点から見た画像平面上に投影して得られるカメラ101の画像座標で表される点prを求めることができる。
【0043】
ここで、一般的に、ある平面上の点(ur,vr)から別の平面上の点(uv,vv)への投影を表す式は、以下の(6)式に示すように3行3列の変換行列を用いて表すことができる。
【0044】
【数3】
ただし、(6)式中、wは距離スケール係数である。(6)式の行列を分解して整理すると(7a)式及び(7b)式が得られる。
【0045】
【数4】
(6)式中の3行3列の変換行列の未知の要素はC00〜C21の8個であるため、仮想カメラの画像座標で表される相異なる4つの点pv0,pv1,pv2,pv3から、それぞれの点に対応するカメラ101の画像座標で表される4つの点pr0,pr1,pr2,pr3を(5)式及び(1)式から求めることによって、(6)式中の3行3列の変換行列の要素C00〜C21を求めることが可能である。
【0046】
そして、図1の視点変換部103は、変換パラメータ演算部106から(6)式中の3行3列の変換行列を取得すると共に、ur,vrの値として、レンズ歪が除去されたカメラ101の撮像映像信号の画像座標で表される点prの画像座標における値を(7a)式及び(7b)式に代入することで、(7a)式及び(7b)式の左辺のuv,vvで表される仮想視点から見た画像座標上の点の仮想撮像映像信号を生成することができる。これにより、本実施の形態も第1の実施の形態と同様の特長を有することができる。
【0047】
(第3の実施の形態)
次に、本発明の視点変換装置及び視点変換方法の第3の実施の形態について説明する。
【0048】
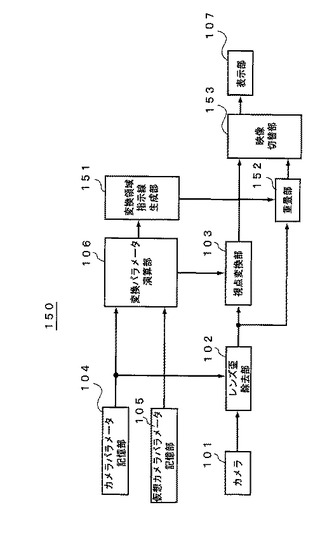
図6は、本発明になる視点変換装置の第3の実施の形態のブロック図を示す。同図中、図1と同一構成部分には同一符号を付し、その説明を省略する。本実施の形態の視点変換装置150は、第1及び第2の実施の形態の視点変換装置に、変換領域指示線生成部151、重畳部152及び映像切替部153を追加した構成である。
【0049】
変換領域指示線生成部151は、仮想カメラの撮像領域の4つの頂点を、カメラ101の映像へ投影したカメラ101の画像座標における4つの頂点を結んだ変換領域を示す指示線を生成する。重畳部152は、レンズ歪除去部102からのカメラ101の撮像映像信号と、変換領域指示線生成部151からの変換領域指示線とを重畳した信号を生成する。映像切替部153は、カメラ101の撮像領域が仮想カメラの撮像領域内にあるかどうかを確認する場合に重畳部152からの重畳信号を選択し、それ以外の場合は視点変換部103からの視点変換後の映像信号を選択する。
【0050】
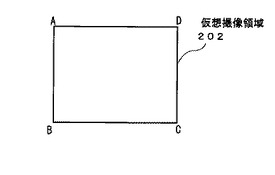
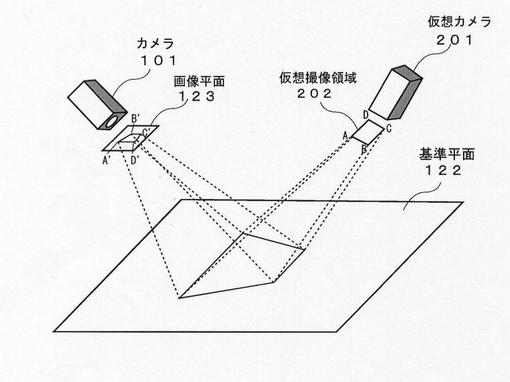
次に、本実施の形態の動作について図6〜図9を併せ参照して説明する。図7は、本実施の形態における変換領域を説明するための図を示す。図7において、カメラ101と仮想カメラ201とは基準平面122の上方の互いに異なる位置にある。仮想カメラ201は、仮想撮像領域202の範囲内の仮想撮像映像信号を生成する。この仮想撮像領域202は、図8に示すように、4つの頂点A(0,0)、B(0,vv1)、C(uv2,vv2)、D(uv3,0)からなる四角形形状である。また、仮想撮像領域202は、仮想カメラパラメータが一定である場合、一定範囲の領域である。
【0051】
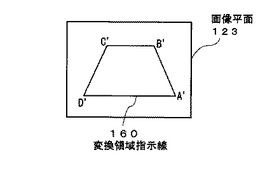
図6に示す変換領域指示線生成部151は、変換パラメータ演算部106から前述した変換行列を取得すると共に、仮想カメラ201の画像座標で表される仮想撮像領域202を示す4つの頂点A(0,0)、B(0,vv1)、C(uv2,vv2)、D(uv3,0)を取得し、これらに基づいて4つの頂点に対応するカメラ101の画像座標で表される4つの頂点A’、B’、C’、D’を求め、更にそれら4つの頂点A’、B’、C’、D’を結ぶ変換領域を示す指示線を生成する。図9は、画像平面123上のカメラ101の画像座標で表される4つの頂点A’、B’、C’、D’を結ぶ変換領域を示す指示線160を示す。
【0052】
重畳部152は、レンズ歪除去部102から供給されるレンズ歪が除去されたカメラ101の撮像映像信号と、変換領域指示線生成部151から供給される変換領域指示線とを重畳して、その重畳信号を映像切替部153に供給する。映像切替部153は、視点変換部103から供給される視点変換後の仮想撮像映像信号と、重畳部152から供給される重畳信号とを入力信号として受け、どちらか一方の入力信号を外部からの制御により選択して表示部107へ出力する。
【0053】
これにより、映像切替部153が重畳部152からの重畳信号を選択した場合は、表示部107により表示される画像が、カメラ101の撮像画像が図9に示す指示線160により4つの頂点A’、B’、C’、D’を結ぶ変換領域内にあるかどうかをユーザが確認することができる。すなわち、ユーザは、表示部107により表示される画像中のカメラ101の撮像画像が、4つの頂点A’、B’、C’、D’を結ぶ変換領域内にあるとき、その撮像画像が仮想カメラ201による表示可能な領域にあると判断することができる。
【符号の説明】
【0054】
100、150 視点変換装置
101 カメラ
102 レンズ歪除去手段
103 視点変換手段
104 カメラパラメータ記憶部
105 仮想カメラパラメータ記憶部
106 変換パラメータ演算部
107 表示部
122 基準平面
123 カメラの画像平面
151 変換領域指示線生成部
152 重畳部
153 映像切替部
201 仮想カメラ
202 仮想カメラの撮像領域(仮想撮像領域)
【技術分野】
【0001】
本発明は視点変換装置及び視点変換方法に係り、特に撮像装置により実視点で撮像された撮像映像を任意の仮想視点から見た映像に変換する視点変換を行う視点変換装置及び視点変換方法に関する。
【背景技術】
【0002】
従来、撮像装置により撮像された実視点の撮像映像を任意の仮想視点から見た映像に視点変換する視点変換装置が知られている(例えば、特許文献1参照)。この視点変換装置においては、カメラで撮像した映像から世界座標への投影映像データを一度生成してメモリに保持し、メモリに保持した世界座標への投影映像データから所定の演算式により任意の視点に設置した仮想カメラの映像を演算生成する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】国際公開第00/07373号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来の視点変換装置では、一旦、世界座標への投影映像データを生成し、その投影映像データを用いて任意視点の仮想カメラの映像を生成するため、世界座標への投影映像データを保持するためのメモリが必要であることと、変換のための演算処理に時間がかかることが課題である。
【0005】
本発明は、上記の点に鑑みなされたもので、視点変換のための演算処理時間が短くて済み、また、視点変換途中に映像をメモリに保持する必要の無い視点変換装置及び視点変換方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の視点変換装置は、任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータを記憶するカメラパラメータ記憶手段と、3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータを記憶する仮想カメラパラメータ記憶手段と、カメラパラメータと仮想カメラパラメータとに基づいて、仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と仮想視点から見た画像平面上に定めた4つの点の画像座標とに基づいて、撮像装置の撮像映像信号を仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する変換パラメータ演算手段と、撮像装置の実視点から見た撮像映像信号に対して、変換行列を用いた視点変換のための演算処理を行って、仮想撮像装置の仮想撮像映像信号を生成する視点変換手段とを有することを特徴とする。
【0007】
また、上記の目的を達成するため、本発明の視点変換装置は、仮想カメラパラメータから得られる仮想撮像装置の仮想撮像領域の4つの頂点を、撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する変換領域指示線生成手段と、変換領域指示線生成手段により生成された指示線と、撮像装置の実視点から見た撮像映像信号との重畳信号を生成して出力する重畳手段と、視点変換手段から出力される仮想撮像映像信号と、重畳手段から出力される重畳信号との一方を選択する映像切替手段とを更に有することを特徴とする。
【0008】
また、上記の目的を達成するため、本発明の視点変換方法は、任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータと、3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータとに基づいて、仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と仮想視点から見た画像平面上に定めた4つの点の画像座標とに基づいて、撮像装置の撮像映像信号を仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する第1のステップと、撮像装置の実視点から見た撮像映像信号に対して、変換行列を用いた視点変換のための演算処理を行って、仮想撮像装置の仮想撮像映像信号を生成する第2のステップとを含むことを特徴とする。
【0009】
また、上記の目的を達成するため、本発明の視点変換方法は、仮想カメラパラメータから得られる仮想撮像装置の仮想撮像領域の4つの頂点を、撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する第3のステップと、第3のステップにより生成された指示線と、撮像装置の実視点から見た撮像映像信号との重畳信号を生成して出力する第4のステップと、第2のステップにより得られる仮想撮像映像信号と、第4のステップにより得られる重畳信号との一方を選択する第5のステップとを更に含むことを特徴とする。
【発明の効果】
【0010】
本発明によれば、撮像装置の実視点から見た撮像映像信号から世界座標の映像を生成する必要がないため、従来に比べてメモリ容量を低減でき、また、視点変換の演算処理時間を短縮することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の視点変換装置の第1の実施の形態のブロック図である。
【図2】カメラの映像空間と基準平面の座標系を説明するための図である。
【図3】カメラパラメータの一例を説明するための図である。
【図4】仮想カメラパラメータの一例を説明するための図である。
【図5】本発明の視点変換装置及び視点変換方法の第1の実施の形態の動作を説明するためのフローチャートである。
【図6】本発明の視点変換装置の第3の実施の形態のブロック図である。
【図7】本発明の視点変換装置及び視点変換方法の第3の実施の形態における変換領域を説明するための図である。
【図8】仮想撮像領域の一例を説明するための図である。
【図9】カメラの映像空間とそこに投影された仮想カメラの仮想撮像領域を説明するための図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0013】
(第1の実施の形態)
図1は、本発明になる視点変換装置の第1の実施の形態のブロック図を示す。同図に示すように、第1の実施の形態の視点変換装置100は、撮像装置であるカメラ101により撮像された撮像映像信号に対して、カメラ101のレンズ歪みを除去するレンズ歪除去部102と、レンズ歪み除去部102からの撮像映像信号に対して任意視点の視点変換を行って、その視点変換後の映像信号を表示部107へ出力する視点変換部103と、カメラパラメータ記憶部104と、仮想カメラパラメータ記憶部105と、変換パラメータ演算部106とより構成される。
【0014】
ここで、まず、本実施の形態で使用する座標軸について図2と共に説明する。図2は、カメラ101の映像空間と基準平面の座標系を説明するための図を示す。図2において、世界座標は、カメラ101の光軸の基準平面122に投影した方向をZw軸とし、Zw軸に垂直で、かつ、基準平面122上の方向をXw軸とし、基準平面122の法線方向をYw軸とする。また、世界座標の原点Owは、カメラ101の主点から下ろした垂線と基準平面122の交点とする。
【0015】
また、カメラ座標は、カメラ101をピンホールカメラモデルで近似したときのピンホールを原点Ocとし、カメラ101の光軸方向をZc軸とし、Zc軸に垂直で、かつ、後述の画像座標の縦方向をYc軸とし、Zc軸及びYc軸にそれぞれ直交する方向をXc軸とする。また、画像座標は、コンピュータに取り込まれるときの座標であり、画像平面123の横方向をU軸とし、縦方向をV軸とする。なお、カメラ101は基準平面122に対して高さhだけ上方に位置する。また、画像平面123はカメラ101の主点から距離f(f:焦点距離)の位置にある。
【0016】
図1に戻って説明する。カメラパラメータ記憶部104は、カメラ101の特性、位置、及び姿勢からなるカメラパラメータを予め記憶している。このカメラパラメータは、具体的には、図3に示すように、カメラ101の焦点距離fとU軸方向、V軸方向の各画素サイズとの積である焦点スケール係数αruとαrv、画像平面(図2の123)とカメラ101の光軸との交点である主点のU軸方向とV軸方向の座標ur0とvr0、カメラレンズの半径方向のレンズ歪係数k1,k2、円周方向のレンズ歪係数p1,p2、世界座標で表したカメラ101の位置を示すXw座標、Yw座標、Zw座標、カメラ101の姿勢を表すXw軸まわりの回転角度ηrとYw軸まわりの回転角度φrとからなる。なお、Zw軸まわりの回転はないものとする。焦点距離スケール係数αru,αrvは、焦点距離を画素単位で表したもので、変換する点を画素単位に変換する。
【0017】
また、図1の仮想カメラパラメータ記憶部105は、3次元空間上の任意の仮想視点に配置された仮想カメラの特性、位置、及び姿勢からなる仮想カメラパラメータを予め記憶している。この仮想カメラパラメータは、具体的には、図4に示すように、仮想カメラの焦点距離とU軸方向、V軸方向の各画素サイズとの積である焦点スケール係数αvuとαvv、画像平面(図2の123)と仮想カメラの光軸との交点である主点のU軸方向とV軸方向の座標uv0とvv0、世界座標で表した仮想カメラの位置を示すXw座標、Yw座標、Zw座標、仮想カメラの姿勢を表すXw軸まわりの回転角度ηvとYw軸まわりの回転角度φvとからなる。なお、Zw軸まわりの回転はないものとする。焦点距離スケール係数αvu,αvuは、焦点距離を画素単位で表したもので、変換する点を画素単位に変換する。
【0018】
変換パラメータ演算部106は、カメラパラメータ記憶部104から読み出されたカメラパラメータと、仮想カメラパラメータ記憶部105から読み出された仮想カメラパラメータとから、カメラ101の図2に示した画像平面123上の点prを、仮想カメラの画像座標で表される点pvに変換する変換行列(変換パラメータ)を後述する演算式により予め求めておく。
【0019】
視点変換部103は、レンズ歪除去部102からの撮像映像信号に対して、変換パラメータ演算部106で求められた変換行列を用いて任意視点に視点変換された映像信号を生成して表示部107へ出力する。
【0020】
次に、本実施の形態の動作について、図5のフローチャート等を併せ参照して説明する。
【0021】
まず、カメラ101が実視点での映像撮影を行う(ステップS11)。これにより、カメラ101は、実視点から見た撮像映像信号をレンズ歪み除去部102へ出力する。続いて、カメラパラメータ記憶部104が、カメラパラメータを読み出す(ステップS12)。このカメラパラメータは、図3に示したように、カメラ101の特性(焦点距離スケール係数αru,αvu、主点座標ur0,vr0、レンズ歪係数k1,k2,p1,p2)、カメラ101の位置及びカメラ101の姿勢を示すパラメータである。
【0022】
続いて、仮想カメラパラメータ記憶部105が、図4に示した仮想カメラパラメータを読み出す(ステップS13)。この仮想カメラパラメータは、図4に示したように、仮想カメラの特性(焦点距離スケール係数αvu,αvv、主点座標uv0,vv0)、仮想カメラの位置及び仮想カメラの姿勢を示すパラメータである。
【0023】
次に、レンズ歪除去部102は、カメラパラメータ記憶部104に記憶されている半径方向のレンズ歪係数k1及びk2と、円周方向のレンズ歪係数p1及びp2とを使用して、カメラ101から供給される撮像映像信号に含まれるレンズ歪を除去する(ステップS14)。レンズ歪の除去された撮像映像信号は視点変換部103へ供給される。
【0024】
続いて、変換パラメータ演算部106は、カメラパラメータと仮想カメラパラメータとから、カメラ101の図2に示した画像平面123上の点prを、仮想カメラの画像座標で表される点pvに変換する変換行列(変換パラメータ)を演算する(ステップS15)。
【0025】
この変換パラメータ演算部106による変換行列の演算動作について詳細に説明する。まず、図2に示した基準平面122上の点Pwとカメラ101のカメラ座標の原点Ocとを結ぶ直線上にあり、かつ、画像平面123上にある点をprとしたとき、点Pwと点prとの間には次式の関係がある。なお、以下の式において、Pwとprは、それらの点の位置を示す座標を示す。
【0026】
sr・pr=Ar(Rr・Pw+Tr) (1)
ただし、(1)式中、srは画像座標における距離スケール係数、Arはカメラ101の内部パラメータ行列、Rrはカメラ101の回転行列、Trはカメラ101の移動行列を示す。上記の(1)式は基準平面122上の点Pwからカメラ101から見た画像座標で表される点prへの投影を表す式である。ここで、距離スケール係数srは変換する点Pwと画像平面123との距離によって、画像平面123上への投影の大きさを調整する係数で、距離が遠ければ小さく、距離が近ければ大きくする。また、上記のカメラ101の内部パラメータ行列Ar、カメラ101の回転行列Rr、カメラ101の移動行列Trは次式で表される。
【0027】
【数1】
(1)式を変形すると、カメラ101の画像平面123で表される点prから基準平面122上の点Pwへの投影を表す次式が得られる。
【0028】
Pw=Rr-1・Ar-1・sr・pr−Rr-1・Tr (2)
一方、基準平面122上の点Pwから仮想カメラから見た画像座標で表される点pvへの投影を表す式は(3)式で表される。
【0029】
sv・pv=Av(Rv・Pw+Tv) (3)
ただし、(3)式中、svは画像座標における距離スケール係数、Avは仮想カメラの内部パラメータ行列、Rvは仮想カメラの回転行列、Tvは仮想カメラの移動行列を示す。ここで、距離スケール係数svは変換する点Pwと仮想カメラから見た画像平面との距離によって、その画像平面上への投影の大きさを調整する係数で、距離が遠ければ小さく、距離が近ければ大きくする。また、上記の仮想カメラの内部パラメータ行列Av、仮想カメラの回転行列Rv、仮想カメラの移動行列Tvは次式で表される。
【0030】
【数2】
ここで、(3)式のPwに(2)式を代入すると、カメラ101により実視点で撮像した画像平面123上の画像座標で表される点prから、仮想カメラにより仮想視点から見た画像座標で表される点pvへの投影を表す次の(4)式が得られる。
【0031】
sv・pv=Av・Rv・Rr-1・Ar-1・sr・pr+Av(Tv−Rv・Rr-1・Tr) (4)
(4)式中の「Av・Rv・Rr-1・Ar-1」と「Av(Tv−Rv・Rr-1・Tr)」とがステップS15で求められる変換行列である。そこで、変換パラメータ演算部106は、上記の変換行列「Av・Rv・Rr-1・Ar-1」と「Av(Tv−Rv・Rr-1・Tr)」とを予め演算し、この変換行列を視点変換部103に供給する。
【0032】
次に、視点変換部103は、レンズ歪除去部102によりレンズ歪が除去されたカメラ101の撮像映像信号に対して、変換パラメータ演算部106から供給される上記の変換行列を用いて(4)式に基づく演算を行って仮想視点から見た仮想撮像映像信号を生成する(ステップS16)。
【0033】
すなわち、視点変換部103は、(4)式の右辺における変換行列は変換パラメータ演算部106から取得し、(4)式の右辺におけるprの値として、レンズ歪が除去されたカメラ101の撮像映像信号の画像座標で表される点prの値を代入し、かつ、距離スケール係数srの値として変換する点Pwと画像平面123との距離に応じた値を代入することで、(4)式の左辺のsv・pvで表される仮想視点から見た仮想撮像映像信号を生成することができる。このとき、演算されたsv・pvのうち、距離スケール係数svを除算することで、基準平面122上の点Pwから仮想カメラから見た画像座標で表される点pvのみを演算することもできる。
【0034】
そして、表示部107は、この仮想視点から見た仮想撮像映像信号(すなわち、仮想カメラの映像)を表示する(ステップS17)。以降、ステップS11に戻り、ステップS11〜S17の処理を繰り返す。
【0035】
なお、ステップS16における(4)式の演算において、仮想カメラの画像座標がある点において、カメラ101の画像座標で表される点prから仮想カメラの画像座標に変換された点pvが存在しない場合は、周辺の存在する点から補間する。
【0036】
このように、本実施の形態の視点変換装置100によれば、視点変換部103が実視点から見た撮像映像信号に対して、変換パラメータ演算部106により演算された変換行列を用いて(4)式の演算を行うことで仮想視点から見た仮想撮像映像信号を生成するようにしたため、基準平面122上の世界座標の点Pwの映像の算出が不要である。一方、従来の視点変換装置では実視点から見た撮像映像信号に対して世界座標上の映像を画素単位で一度生成してメモリに記憶しておき、そのメモリから読み出した世界座標上の映像から仮想カメラの映像を生成していた。
【0037】
従って、本実施の形態の視点変換装置100によれば、世界座標の点Pwの映像の算出が不要であるため、従来の視点変換装置で必要であった世界座標の点Pwの映像を記憶するための大容量のメモリが不要であり、その結果、メモリ容量が低減でき、かつ、視点変換のための演算処理時間を短縮することができる。
【0038】
(第2の実施の形態)
次に、本発明の視点変換装置及び視点変換方法の第2の実施の形態について説明する。
【0039】
本実施の形態の視点変換装置の全体構成は、図1のブロック図に示した第1の実施の形態の視点変換装置100と同様構成である。第2の実施の形態の視点変換装置は、第1の実施の形態の視点変換装置100と比較し、変換パラメータ演算部106における変換行列の演算方法が異なる。
【0040】
第2の実施の形態の視点変換装置の変換パラメータ演算部106においては、仮想カメラの画像座標で表される相異なる4つの点pv0,pv1,pv2,pv3から、それぞれの点に対応する実視点のカメラ101の画像座標で表される4つの点pr0,pr1,pr2,pr3を求め、それら4つの点pr0,pr1,pr2,pr3に基づいて、カメラ101の画像座標で表される点prから仮想カメラの画像座標で表される点pvへの変換行列を求める。なお、仮想カメラの画像座標で表される上記の4つの点の内の1つは、仮想カメラの画像座標の原点を含んでもよい。
【0041】
次に、第2の実施の形態の視点変換装置の変換パラメータ演算部106における変換行列生成方法について詳細に説明する。仮想カメラの画像座標で表される点pvから、基準平面122上の点Pwへの投影を表す式は、前記(3)式を変形することにより(5)式のように表すことができる。
【0042】
Pw=Rv-1・Av-1・sv・pv−Rv-1・Tv (5)
この(5)式と前記(1)式とにより、基準平面122上に投影した点Pwを、実視点から見た画像平面上に投影して得られるカメラ101の画像座標で表される点prを求めることができる。
【0043】
ここで、一般的に、ある平面上の点(ur,vr)から別の平面上の点(uv,vv)への投影を表す式は、以下の(6)式に示すように3行3列の変換行列を用いて表すことができる。
【0044】
【数3】
ただし、(6)式中、wは距離スケール係数である。(6)式の行列を分解して整理すると(7a)式及び(7b)式が得られる。
【0045】
【数4】
(6)式中の3行3列の変換行列の未知の要素はC00〜C21の8個であるため、仮想カメラの画像座標で表される相異なる4つの点pv0,pv1,pv2,pv3から、それぞれの点に対応するカメラ101の画像座標で表される4つの点pr0,pr1,pr2,pr3を(5)式及び(1)式から求めることによって、(6)式中の3行3列の変換行列の要素C00〜C21を求めることが可能である。
【0046】
そして、図1の視点変換部103は、変換パラメータ演算部106から(6)式中の3行3列の変換行列を取得すると共に、ur,vrの値として、レンズ歪が除去されたカメラ101の撮像映像信号の画像座標で表される点prの画像座標における値を(7a)式及び(7b)式に代入することで、(7a)式及び(7b)式の左辺のuv,vvで表される仮想視点から見た画像座標上の点の仮想撮像映像信号を生成することができる。これにより、本実施の形態も第1の実施の形態と同様の特長を有することができる。
【0047】
(第3の実施の形態)
次に、本発明の視点変換装置及び視点変換方法の第3の実施の形態について説明する。
【0048】
図6は、本発明になる視点変換装置の第3の実施の形態のブロック図を示す。同図中、図1と同一構成部分には同一符号を付し、その説明を省略する。本実施の形態の視点変換装置150は、第1及び第2の実施の形態の視点変換装置に、変換領域指示線生成部151、重畳部152及び映像切替部153を追加した構成である。
【0049】
変換領域指示線生成部151は、仮想カメラの撮像領域の4つの頂点を、カメラ101の映像へ投影したカメラ101の画像座標における4つの頂点を結んだ変換領域を示す指示線を生成する。重畳部152は、レンズ歪除去部102からのカメラ101の撮像映像信号と、変換領域指示線生成部151からの変換領域指示線とを重畳した信号を生成する。映像切替部153は、カメラ101の撮像領域が仮想カメラの撮像領域内にあるかどうかを確認する場合に重畳部152からの重畳信号を選択し、それ以外の場合は視点変換部103からの視点変換後の映像信号を選択する。
【0050】
次に、本実施の形態の動作について図6〜図9を併せ参照して説明する。図7は、本実施の形態における変換領域を説明するための図を示す。図7において、カメラ101と仮想カメラ201とは基準平面122の上方の互いに異なる位置にある。仮想カメラ201は、仮想撮像領域202の範囲内の仮想撮像映像信号を生成する。この仮想撮像領域202は、図8に示すように、4つの頂点A(0,0)、B(0,vv1)、C(uv2,vv2)、D(uv3,0)からなる四角形形状である。また、仮想撮像領域202は、仮想カメラパラメータが一定である場合、一定範囲の領域である。
【0051】
図6に示す変換領域指示線生成部151は、変換パラメータ演算部106から前述した変換行列を取得すると共に、仮想カメラ201の画像座標で表される仮想撮像領域202を示す4つの頂点A(0,0)、B(0,vv1)、C(uv2,vv2)、D(uv3,0)を取得し、これらに基づいて4つの頂点に対応するカメラ101の画像座標で表される4つの頂点A’、B’、C’、D’を求め、更にそれら4つの頂点A’、B’、C’、D’を結ぶ変換領域を示す指示線を生成する。図9は、画像平面123上のカメラ101の画像座標で表される4つの頂点A’、B’、C’、D’を結ぶ変換領域を示す指示線160を示す。
【0052】
重畳部152は、レンズ歪除去部102から供給されるレンズ歪が除去されたカメラ101の撮像映像信号と、変換領域指示線生成部151から供給される変換領域指示線とを重畳して、その重畳信号を映像切替部153に供給する。映像切替部153は、視点変換部103から供給される視点変換後の仮想撮像映像信号と、重畳部152から供給される重畳信号とを入力信号として受け、どちらか一方の入力信号を外部からの制御により選択して表示部107へ出力する。
【0053】
これにより、映像切替部153が重畳部152からの重畳信号を選択した場合は、表示部107により表示される画像が、カメラ101の撮像画像が図9に示す指示線160により4つの頂点A’、B’、C’、D’を結ぶ変換領域内にあるかどうかをユーザが確認することができる。すなわち、ユーザは、表示部107により表示される画像中のカメラ101の撮像画像が、4つの頂点A’、B’、C’、D’を結ぶ変換領域内にあるとき、その撮像画像が仮想カメラ201による表示可能な領域にあると判断することができる。
【符号の説明】
【0054】
100、150 視点変換装置
101 カメラ
102 レンズ歪除去手段
103 視点変換手段
104 カメラパラメータ記憶部
105 仮想カメラパラメータ記憶部
106 変換パラメータ演算部
107 表示部
122 基準平面
123 カメラの画像平面
151 変換領域指示線生成部
152 重畳部
153 映像切替部
201 仮想カメラ
202 仮想カメラの撮像領域(仮想撮像領域)
【特許請求の範囲】
【請求項1】
任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータを記憶するカメラパラメータ記憶手段と、
3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータを記憶する仮想カメラパラメータ記憶手段と、
前記カメラパラメータと前記仮想カメラパラメータとに基づいて、前記仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を前記実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と前記仮想視点から見た画像平面上に定めた前記4つの点の画像座標とに基づいて、前記撮像装置の撮像映像信号を前記仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する変換パラメータ演算手段と、
前記撮像装置の前記実視点から見た撮像映像信号に対して、前記変換行列を用いた視点変換のための演算処理を行って、前記仮想撮像装置の仮想撮像映像信号を生成する視点変換手段と
を有することを特徴とする視点変換装置。
【請求項2】
前記仮想カメラパラメータから得られる前記仮想撮像装置の仮想撮像領域の4つの頂点を、前記撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する変換領域指示線生成手段と、
前記変換領域指示線生成手段により生成された前記指示線と、前記撮像装置の前記実視点から見た撮像映像信号との重畳信号を生成して出力する重畳手段と、
前記視点変換手段から出力される前記仮想撮像映像信号と、前記重畳手段から出力される前記重畳信号との一方を選択する映像切替手段と
を更に有することを特徴とする請求項1記載の視点変換装置。
【請求項3】
任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータと、3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータとに基づいて、前記仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を前記実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と前記仮想視点から見た画像平面上に定めた前記4つの点の画像座標とに基づいて、前記撮像装置の撮像映像信号を前記仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する第1のステップと、
前記撮像装置の前記実視点から見た撮像映像信号に対して、前記変換行列を用いた視点変換のための演算処理を行って、前記仮想撮像装置の仮想撮像映像信号を生成する第2のステップと
を含むことを特徴とする視点変換方法。
【請求項4】
前記仮想カメラパラメータから得られる前記仮想撮像装置の仮想撮像領域の4つの頂点を、前記撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する第3のステップと、
前記第3のステップにより生成された前記指示線と、前記撮像装置の前記実視点から見た撮像映像信号との重畳信号を生成して出力する第4のステップと、
前記第2のステップにより得られる前記仮想撮像映像信号と、前記第4のステップにより得られる前記重畳信号との一方を選択する第5のステップと
を更に含むことを特徴とする請求項3記載の視点変換方法。
【請求項1】
任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータを記憶するカメラパラメータ記憶手段と、
3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータを記憶する仮想カメラパラメータ記憶手段と、
前記カメラパラメータと前記仮想カメラパラメータとに基づいて、前記仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を前記実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と前記仮想視点から見た画像平面上に定めた前記4つの点の画像座標とに基づいて、前記撮像装置の撮像映像信号を前記仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する変換パラメータ演算手段と、
前記撮像装置の前記実視点から見た撮像映像信号に対して、前記変換行列を用いた視点変換のための演算処理を行って、前記仮想撮像装置の仮想撮像映像信号を生成する視点変換手段と
を有することを特徴とする視点変換装置。
【請求項2】
前記仮想カメラパラメータから得られる前記仮想撮像装置の仮想撮像領域の4つの頂点を、前記撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する変換領域指示線生成手段と、
前記変換領域指示線生成手段により生成された前記指示線と、前記撮像装置の前記実視点から見た撮像映像信号との重畳信号を生成して出力する重畳手段と、
前記視点変換手段から出力される前記仮想撮像映像信号と、前記重畳手段から出力される前記重畳信号との一方を選択する映像切替手段と
を更に有することを特徴とする請求項1記載の視点変換装置。
【請求項3】
任意の実視点の位置に設置された撮像装置の特性、位置及び姿勢を含むカメラパラメータと、3次元空間上の任意の仮想視点に配置された仮想撮像装置の特性、位置及び姿勢を含む仮想カメラパラメータとに基づいて、前記仮想視点から見た画像平面上に定めた4つの点を所定の基準平面上に投影し、その基準平面上に投影した4つの点を前記実視点から見た画像平面上に投影して得られる4つの点の画像座標を求め、その求めた4つの点の画像座標と前記仮想視点から見た画像平面上に定めた前記4つの点の画像座標とに基づいて、前記撮像装置の撮像映像信号を前記仮想撮像装置の仮想撮像映像信号へ変換するための変換行列を演算する第1のステップと、
前記撮像装置の前記実視点から見た撮像映像信号に対して、前記変換行列を用いた視点変換のための演算処理を行って、前記仮想撮像装置の仮想撮像映像信号を生成する第2のステップと
を含むことを特徴とする視点変換方法。
【請求項4】
前記仮想カメラパラメータから得られる前記仮想撮像装置の仮想撮像領域の4つの頂点を、前記撮像装置の実視点から見た画像平面上の画像座標で表される4つの点に変換し、更にその変換後の4つの点を結んだ変換領域を示す指示線を生成する第3のステップと、
前記第3のステップにより生成された前記指示線と、前記撮像装置の前記実視点から見た撮像映像信号との重畳信号を生成して出力する第4のステップと、
前記第2のステップにより得られる前記仮想撮像映像信号と、前記第4のステップにより得られる前記重畳信号との一方を選択する第5のステップと
を更に含むことを特徴とする請求項3記載の視点変換方法。
【図1】

【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図2】
【図7】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図2】
【図7】
【公開番号】特開2011−248630(P2011−248630A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−121224(P2010−121224)
【出願日】平成22年5月27日(2010.5.27)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月27日(2010.5.27)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
[ Back to top ]