
起立補助装置
【課題】使用者が着座姿勢から足に身体の重心を掛けて完全に立ち上がるに至る動作の十分な補助が得られる装置の提供を目的とする。
【解決手段】着座部15と、着座部15と別体の肘掛け部材14と、着座部15が略水平な着座状態から着座部15の前端部を支点に着座部15の後端側が立ち上がる倒立状態へ揺動可能に支持する第1連係機構30と、第1連係機構30を作動させる第1駆動手段21と、肘掛け部材14を前側斜め上方へ平行移動可能に支持する第2連係機構40と、第2連係機構40を作動させる第2駆動手段25と、を備える。
【解決手段】着座部15と、着座部15と別体の肘掛け部材14と、着座部15が略水平な着座状態から着座部15の前端部を支点に着座部15の後端側が立ち上がる倒立状態へ揺動可能に支持する第1連係機構30と、第1連係機構30を作動させる第1駆動手段21と、肘掛け部材14を前側斜め上方へ平行移動可能に支持する第2連係機構40と、第2連係機構40を作動させる第2駆動手段25と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、起立補助装置に関する。詳しくは、椅子などに腰掛ける使用者の着座姿勢から起立姿勢への移行を補助する装置に関する。
【背景技術】
【0002】
従来から、足腰の弱くなった高齢者や病人などのように自力で着座姿勢から起立姿勢への移行が困難な者を補助する装置として諸種のものが知られる。
【0003】
特許文献1の場合、座部が前後2つの部材に分けられ、前座部と後座部との間が屈曲可能に連結される。前座部の前端部が基台に枢支され、前座部の後端部と基台との間に伸縮手段(電動シリンダ)が介装される。
【0004】
前座部および後座部が前後に連なる着座状態から、伸縮手段が前側斜め上方へ作動(伸張)すると、前座部の後端側が押し上げられ、後座部との連結部を屈曲させながら前座部が基台との枢支点を中心に上方へ揺動することによって前側へ傾き、この動きに従って後座部がリンク機構に支えられながら前側斜め上方へ平行移動するようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−137639号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
このような従来の装置においては、座部に座る使用者は、後座部の前側斜め上方への平行移動に加え、前座部が前側へ傾斜するので、膝部が伸ばされるようになる。その状態で起立補助が終了するため、使用者の臀部が後座部に掛けたままとなる。言い換えれば、使用者は、腰部を伸ばしながら後座部から上体を起こし、足へ身体の重心を掛けて完全に立ち上がるに至る動作の補助が十分に得られない、という不具合が考えられる。
【0007】
この発明は、このような不具合に鑑みなされたものであり、使用者が着座姿勢から足に身体の重心を掛けて完全に立ち上がるに至る動作の十分な補助が得られる装置の提供を目的とする。
【課題を解決するための手段】
【0008】
この発明は、椅子に座る使用者が立ち上がる際の動作を補助する装置において、着座部と、前記着座部と別体の肘掛け部材と、前記着座部が略水平な着座状態から前記着座部の前端部を支点に前記着座部の後端側が立ち上がる倒立状態へ揺動可能に支持する第1連係機構と、第1連係機構を作動させる第1駆動手段と、前記肘掛け部材を前側斜め上方へ平行移動可能に支持する第2連係機構と、第2連係機構を作動させる第2駆動手段と、を備えることを特徴とする起立補助装置である。
【発明の効果】
【0009】
この発明においては、第1駆動手段および第1連係機構の作動により、着座部が略水平な着座状態から着座部の前端部を支点に着座部の後端側が立ち上がる倒立状態へ揺動すると、着座部の前方への傾斜に伴って使用者の臀部が前側斜め上方へ送り出されるため、使用者の腰部が伸ばされ、膝部が伸ばしやすくなり、上体が起こされるようになる。また、第2駆動手段および第2連係機構の作動により、着座部と別体の肘掛け部材が着座部の動きに追従するように前側斜め上方へ平行移動するため、使用者は、両脇の肘掛け部材に支えられながら上体が押し上げられ、負担を殆ど受けることなく膝部を伸ばしながら、身体の重心が足に掛かる完全な起立姿勢に立ち上がることができる。つまり、着座姿勢から起立姿勢に至る立ち上がり動作の補助が十分に得られる。
【図面の簡単な説明】
【0010】
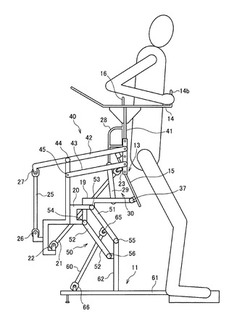
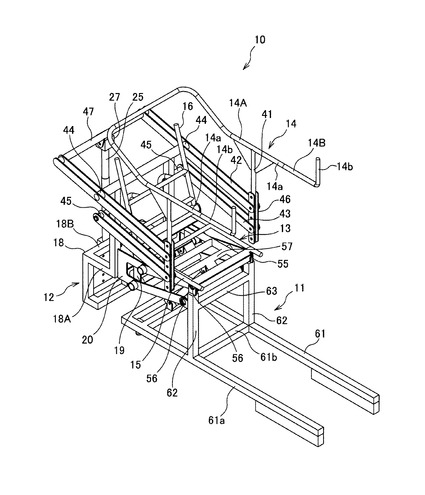
【図1】この発明の実施形態を示す斜視図である。
【図2】同じく正面図である。
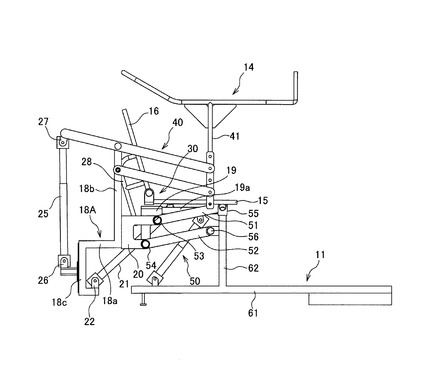
【図3】同じく側面図である。
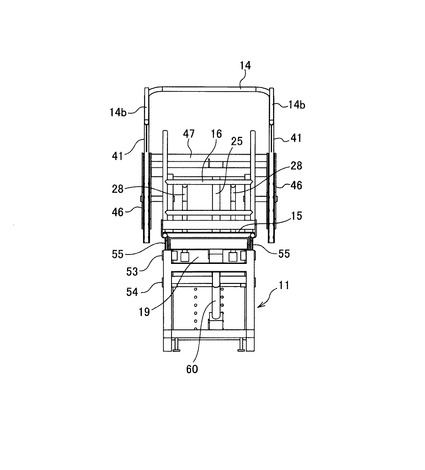
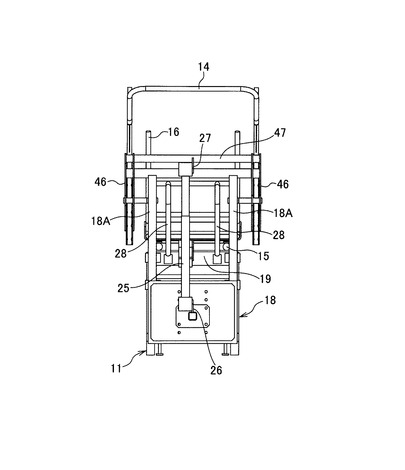
【図4】同じく背面図である。
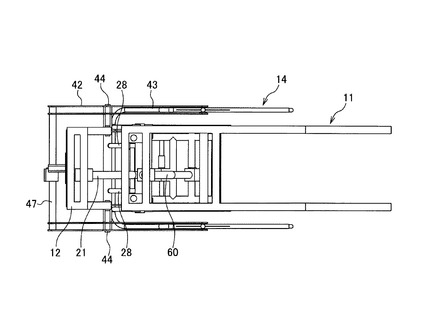
【図5】同じく底面図である。
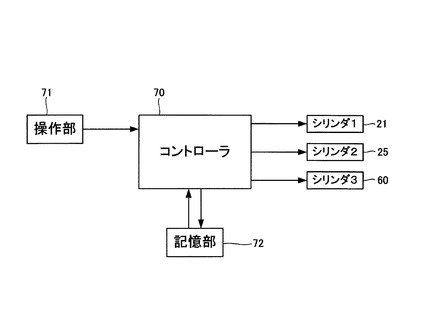
【図6】同じく制御装置の概要構成図である。
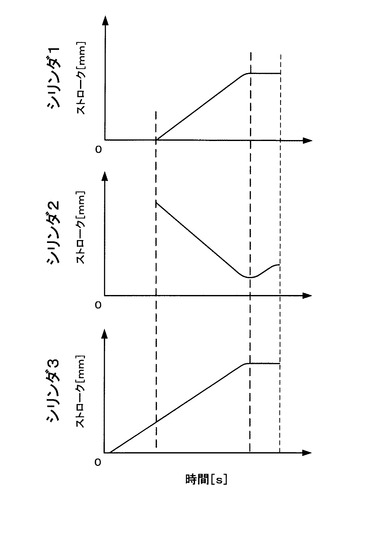
【図7】同じく制御内容を説明する特性図である。
【図8】同じく作動状態の説明図である。
【図9】同じく作動状態の説明図である。
【図10】同じく作動状態の説明図である。
【発明を実施するための形態】
【0011】
図に基づいて、この発明の実施形態に係る起立補助装置を説明する。
【0012】
起立補助装置は、足腰が弱った高齢者や病人など使用者が椅子に座った状態(着座姿勢)から起立姿勢へ移行する際の立ち上がる動作を補助するためのものであり、病院の座席や、電車など乗り物の優先席のほか、車椅子などへの適用が想定される。
【0013】
図は、起立補助装置として起立補助椅子への適用例を示すものである。以下の説明において、「前」,「後」,「左」,「右」とは、椅子に座る使用者を基準に指称するものとする。すなわち、使用者の正面が「前」であり、使用者の背後が「後」であり、使用者の左手が「左」であり、使用者の右手が「右」である。
【0014】
起立補助椅子10は、基台11と、基台11に支持される可動台12と、可動台12に支持される座部材13と、座部材13と別体の肘掛け部材14と、を備える。なお、座部材13(着座部15および背凭れ部16)のマットやクッション、肘掛け部材14のクッション、等を含む外装材については、図示を省略する。
【0015】
可動台12は、座部材13の後方に配置される基部18、座部材13の下方を前方へ延びるステイ19(第1連係機構30の支持部を構成する)、第3連係機構50のリンク杆51,52を枢支するブラケット20と、を備える。
【0016】
基部18は、左右1対のサイドメンバ18Aと、これらの間を連結する複数のクロスメンバ18Bと、から構成される。サイドメンバ18Aは、前後方向へ延びる中間部18aと、中間部18aの前端から上方へ延びる前側部18bと、中間部18aの後端から下方へ延びる後側部18cと、から構成される。サイドメンバ18Aは、側面(図3、参照)から見ると、棚状に形成される。
【0017】
ブラケット20は、側面(図3、参照)から見ると、コ字状に形成され、コ字状の両端を前方へ向けて各サイドメンバ18Aの前側部18bに取り付けられる。ステイ19は、側面(図3、参照)から見ると、L字状に形成され、L字状の長辺部19aを前方へ向けて基部18に固定される。
【0018】
基部18において、第1駆動手段21の一端を回動自在に支持する枢着部22と、第2駆動手段25の一端を回動自在に支持する枢着部26と、が左右方向の中間位置に備えられる。コ字状のブラケット20の両端に第3連係機構50のリンク杆51,52の一端を回動自在に支持する枢着部53,54が、ステイ19の先端部(前端部)に着座部15の前端部を回動自在に支持する枢着部37が配置される。
【0019】
座部材13は、使用者の臀部を受ける着座部15と、使用者の背中を支える背凭れ部16と、から構成される。着座部15は、ステイ19の先端部(前端部)の枢着部27(図9,図10、参照)を支点に上下方向へ揺動自在に支持される。着座部15の後端部に背凭れ部16の下端部が回動(屈伸)自在に枢着される。背凭れ部16を背後から支える支柱28が備えられる。支柱28は、背凭れ部16の背面に取り付けられ、下方へ延びる延長端にリンク杆29(図9,10、参照)の一端が枢支される。リンク杆29の他端は、基部18のステイ19の前端側(着座部15の枢着部27の後方)に枢支される。これらにより、可動台12と座部材13との間に第1連係機構30が構成される。
【0020】
第1駆動手段21は、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させる電動機(モータ)と、から構成される。第1駆動手段21は、一端(シリンダ側)が基部18の枢着部22に支持され、他端(ロッド側)が着座部15の後端側に配置される枢着部23(図9,図10、参照)に支持される。第1駆動手段21は、基部18の枢着部22(図3、参照)と着座部15の枢着部23との間において、シリンダおよびロッドが前側斜め上方へ向く姿勢に介装され、着座部15が略水平な着座状態からモータが伸側に作動すると、ロッドが伸張して着座部15の後端側を押し上げるようになっている。これにより、着座部15が略水平な着座状態から後端側が立ち上がる起立補助位置(補助動作の停止位置)へ揺動し、背凭れ部16との枢着部(背凭れ部16と着座部15との枢着点)を上昇させながら、リンク杆29が略水平な着座状態からステイ19との枢支点を中心に立ち上がる起立補助位置へ揺動するのである。起立補助位置においては、着座部15が鉛直に近い倒立状態となり、背凭れ部16は着座部15から鉛直に近い起立状態に伸び上がり、リンク杆29は倒立状態の着座部15と略平行となる(図10、参照)。
【0021】
肘掛け部材14は、上方(図1、参照)から見ると、U字状に形成され、U字状の両端が前方へ向く姿勢に配置される。U字状の対向する両辺部14a,14aの中間から下方へ支柱41が延ばされ、各支柱41の下部に第2連係機構40の枢着部46が備えられる。枢着部46は、枢支点を変えられるように複数の軸穴が所定方向(図示の場合、高さ方向)へ配列される。
【0022】
第2連係機構40は、平行な上下1対のリンク杆42,43(図8〜図9、参照)を備える。平行な上下1対のリンク杆42,43は、座部材13を挟む両側に配置される。基部18の各サイドメンバ18Aにおいて、前側部18bの上部に左右外側へ突出する枢着部44,45が配置される。上側のリンク杆42は、一端が支柱41側の枢着部46の上側の軸穴に挿入する軸部(図示せず)を介して回動自在に支持され、他端側がサイドメンバ18Aの上側の枢着部44に枢支される。下側のリンク杆43は、一端が支柱41側の枢着部46の下側の軸穴に挿入する軸部(図示せず)を介して回動自在に支持され、他端がサイドメンバ18Aの下側の枢着部45に枢支される。
【0023】
上側のリンク杆42の他端側は、枢着部44よりも後方へ延長され、これら延長部の先端間が横架部材47によって両側のリンク杆42が連結される。座部材13を挟む両側のリンク杆42,43は、上側のリンク杆42同士が横架部材47(図1、参照)によって連結するため、一体に作動するようになっている。横架部材47の中間に第2駆動手段25の枢着部27が配置される。
【0024】
第2駆動手段25は、第1駆動手段21と同じく、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させる電動機(モータ)と、から構成される。第2駆動手段25は、一端(シリンダ側)が基部18側の枢着部26に枢支される。枢着部26は、基部18の下部における左右方向の中間に配置される(図4、参照)。第2駆動手段25は、シリンダおよびロッドが略鉛直に立てられ、横架部材47の枢着部27に他端(ロッド側)が回動自在に連結される。
【0025】
平行な上下1対のリンク杆42,43が前方傾斜する着座状態(図8、参照)から、第2駆動手段25が縮側に作動すると、平行な上下1対のリンク杆42,43が略水平となる起立補助位置(補助動作の停止位置)へ作動する(図10、参照)。これにより、肘掛け部材14は、基部18に対して前側斜め上方へ弧状の軌跡をもって平行移動するようになっている。
【0026】
肘掛け部材14は、図示の場合、パイプ部材を用いてU字状に形成されるが、U字状の両辺部14a,14aの先端側は、U字状の本体側のパイプ部材14Aと別のパイプ部材14Bによって形成され、本体側のパイプ部材14Aの両端部にそれぞれ伸縮可能な嵌合状態に接続される。パイプ部材14A,14Bの内側において、本体側のパイプ部材14Aと先端側のパイプ部材14Bとの間に図示しないスプリング(バネ手段)が介装される。先端側のパイプ部材14Bの初期位置および伸出位置を規制するストッパ(図示せず)が備えられる。14bはグリップ(握持部)であり、先端側のパイプ部材14Aに形成される(図1、参照)。
【0027】
使用者がクリップ14bを掴み、上体が前方へ移動するに連れて肘掛け部材14の先端側のパイプ部材14Bが本体側のパイプ部材14Aから前方へ伸ばせるため、着座状態から起立補助位置までの間において、グリップ14bを放さずに握り続けられるので、歩行へ移行する際の動作を支えることが可能となる。
【0028】
基台11は、設置部61と脚柱部62とから構成され、椅子の脚部として機能する。設置部61は、床面に沿って前後方向へ延びる左右1対のサイドメンバ61a,61aと、これらの間を連結する複数のクロスメンバ61bと、から構成される。脚柱部62は、各サイドメンバ61a,61aの中間から脚柱62a,62aが鉛直に起立され、脚柱62a,62a間が横架部材63によって連結される。各脚柱62a,62aの上部に第3連係機構50の枢着部55,56が配置される。
【0029】
第3連係機構50は、平行な上下1対のリンク杆51,52を備える。上側のリンク杆51は、一端が脚柱部62の上側の枢着部55に回動自在に支持され、他端が可動台18におけるブラケット20の上側の枢着部53に回動自在に支持される。下側のリンク杆52は、一端が脚柱部62の下側の枢着部56に回動自在に支持され、他端が可動台12におけるブラケット20の下側の枢着部54に回動自在に支持される。
【0030】
平行な上下1対のリンク杆51,52は、座部材13を挟む両側に配置される。座部材13を挟む両側のリンク杆51,52は、上側のリンク杆51同士が横架部材57(図1、参照)によって連結するため、一体に作動するようになっている。横架部材57の中間に第3駆動手段60の枢着部65(図10、参照)が配置される。
【0031】
第3駆動手段60は、第1,2駆動手段21,25と同じく、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させる電動機(モータ)と、から構成される。第3駆動手段60は、一端(シリンダ側)が基台11側の枢着部66に枢支される。枢着部66は、設置部61におけるクロスメンバ61bの中間に配置される。第3駆動手段60は、シリンダおよびロッドが前側斜め上方へ向く姿勢に配置され、横架部材57の枢着部65に他端(ロッド側)が回動自在に連結される。
【0032】
平行な上下1対のリンク杆51,52が後方に傾く着座状態(図8、参照)から、第3駆動手段が伸側に作動すると、平行な上下1対のリンク杆51,52が前方に傾く起立補助位置(補助動作の停止位置)へ揺動する(図10、参照)。これにより、可動台12は、基台11に対して前側斜め上方へ弧状の軌跡をもって平行移動するようになっている。
【0033】
図6は 起立補助椅子10の制御装置を説明するものであり、操作部71と、補助動作の制御に必要なデータを格納する記憶部72と、コントローラ70と、を備える。コントローラ70は、操作部71の入力操作により、記憶部72からのデータ(信号)に基づいて、図7のように第1駆動手段21(図示のシリンダ1),第2駆動手段25(図示のシリンダ2),3駆動手段60(図示のシリンダ3)の作動を制御する。図7は、制御内容を例示する特性図である。各駆動手段21,25,60は、コントローラ70により、記憶部71の格納データに基づいて、起立補助作動のタイミング、ストローク、スピードが制御される。
【0034】
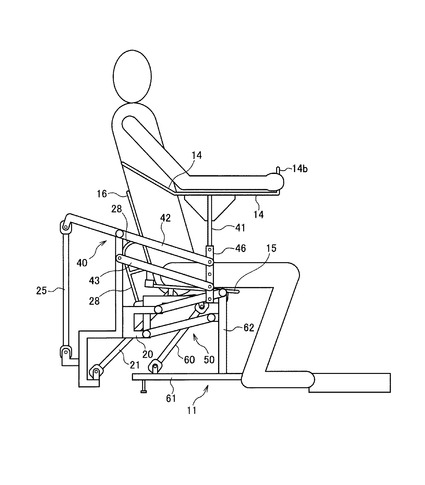
図7を参照しながら、図8〜図10に基づいて、起立補助椅子10の作動を説明する。使用者が座部材13に座った着座状態において、操作部71の入力操作により、起立補助の起動が指令されると、先ず始めに第3駆動手段60が伸張(起立補助作動)する。これに伴う第3連係機構50の作動により、平行な上下1対のリンク杆51,52が後側に傾く着座状態から前側に傾く起立補助位置(補助動作の停止位置)へ揺動し、その動きに連れて可動台12が所定の軌跡をもって上方へ平行移動する。この可動台12の動きに伴って座部材13が基台11に対して上昇するため、着座部15に座る使用者の屈曲した膝部が次第に伸ばされる。
【0035】
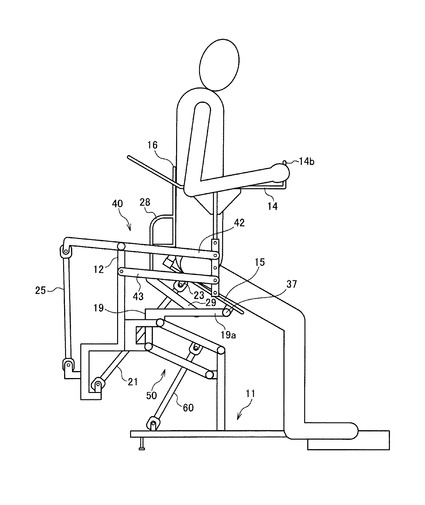
第3駆動手段60に遅れて第1駆動手段21が伸張(起立補助作動)する。これに伴う第1連係機構の作動により、着座部15は、後端側が第1駆動手段21によって前側斜め上方へ押し上げられ、前端部の枢着点27を中心に上方へ揺動する。これに伴って背凭れ部16が着座部15の上方へ伸び上がってくるので、着座部15に座る使用者の腰部が伸ばされ、背筋も前方へ押されるようになる。第3駆動手段60の作動に基づく可動台12の上昇に第1駆動手段21の作動に基づく座部材13の揺動が加わるため、使用者の膝部から腰部が伸ばされ、背筋が立ってくるので、使用者の身体の重心が足へ次第に掛かるようになる。
【0036】
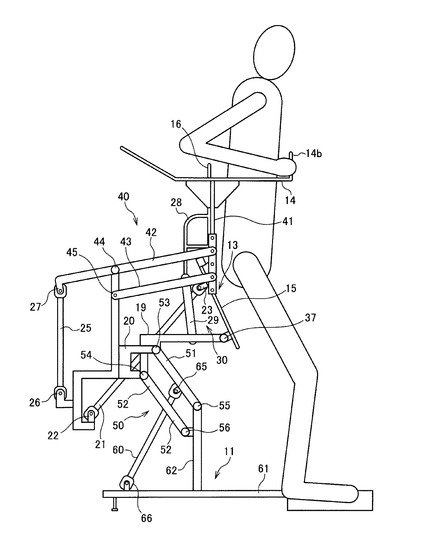
第1駆動手段21と同時に第2駆動手段25が収縮(起立補助作動)する。これに伴う第2連係機構40の作動により、平行な上下1対のリンク杆41,42が前側に傾く着座状態から略水平な起立補助位置(補助動作の停止位置)へ揺動し、その動きに連れて肘掛け部材が所定の軌跡をもって前側斜め上方へ平行移動する。第1駆動手段21の作動に基づく座部材13の着座部15および背凭れ部16の動作に追従するように肘掛け部材16が前側斜め上方へ平行移動するので、使用者は、両脇の肘掛け部材16の動きによって上体が押し上げられ、着座部15および背凭れ部16の動きによって前方へ送り出されるようになる。このため、身体の重心が足に掛かる完全な起立姿勢に立ち上がることができる。つまり、使用者は、着座姿勢から起立姿勢に至る立ち上がり動作の補助が十分に得られる。
【0037】
第1駆動手段21および第3駆動手段60は、起立補助の停止位置に達すると、伸張が停止される。第2駆動手段25は、第1駆動手段21および第3駆動手段60の作動が停止する時点を挟む前後において、収縮から伸張へ作動が切り替えられ、肘掛け部材16の高さを下げて起立補助の停止位置に達すると、作動が停止される(図7のシリンダ2、参照)。これにより、使用者がグリップ14bを握っていると、肘掛け部材16の高さが下がることで肘部が自然に伸ばせるので、上体が立ってくるに連れてグリップ16をちょうど杖のようにして身体を支えることができる。従って、起立姿勢からさらに歩行動作へ無理なく円滑に移行しえるようになる。
【0038】
第1連係機構30は、背凭れ部16やリンク杆29を含めて構成される。第2連係機構40は、平行な上下1対のリンク杵41、42を含めて構成される。第3連係機構50は、平行な上下1対のリンク杵51、52を含めて構成される。
【0039】
この実施形態においては、基台11,座部材13,肘掛け部材14のほか、可動台12を備えるので、第1駆動手段21,第2駆動手段25,第3駆動手段60は、基台11に集中させることなく簡単かつ容易に配置(レイアウト)することができる。第1連係機構30および第1駆動手段21は、可動台12と着座部15との間に介装され、第2連係機構40および第2駆動手段25は、可動台12と肘掛け部材16との間に介装され、第3連係機構50および第3駆動手段60は、基台11と可動台12との間に介装されるので、座部材13,肘掛け部材14,可動台12を補助動作の停止位置から初期位置へ復帰させる際においては、各駆動手段21,25,60を同期的に作動させても、これらの動きが互いに干渉するようなこともなく、迅速な復帰が可能となる。
【0040】
肘掛け部材14は、支柱38の下部に配置される枢着部46が枢支点を変えられるようになっているので、肘掛け部材14の高さを使用者の体形などに合わせて調整することができる。記憶部71に格納されるデータに基づく制御特性(図7、参照)についても、使用者の体形などに適する特性が得られるようにすると良い。そのため、記憶部71に体形などを変数とする複数のデータを格納しておき、操作部71の入力操作によって体形などに適する特性を任意に選択可能な設定とすることが考えられる。
【0041】
第1駆動手段21,第2駆動手段25,第3駆動手段60は、シリンダにロッドを伸縮させるモータを備えるもの(電動シリンダ)が用いられるが、これに限定されるものでなく、全部または一部を別の伸縮手段(ガスダンパなど)に代えても良い。
【産業上の利用可能性】
【0042】
この発明は、椅子に限らず、着座部があって、着座部に座る使用者が起立姿勢へ立ち上がる動作の補助が必要な各種の設備の着座姿勢から起立姿勢への移行を補助する装置へ広く適用することができる。
【符号の説明】
【0043】
11 基台
12 可動台
13 座部材
14 肘掛け部材
15 着座部材
16 背凭れ部
21 第1駆動手段
25 第2駆動手段
30 第1連係機構
40 第2連係機構
50 第3連係機構
60 第3駆動手段
【技術分野】
【0001】
この発明は、起立補助装置に関する。詳しくは、椅子などに腰掛ける使用者の着座姿勢から起立姿勢への移行を補助する装置に関する。
【背景技術】
【0002】
従来から、足腰の弱くなった高齢者や病人などのように自力で着座姿勢から起立姿勢への移行が困難な者を補助する装置として諸種のものが知られる。
【0003】
特許文献1の場合、座部が前後2つの部材に分けられ、前座部と後座部との間が屈曲可能に連結される。前座部の前端部が基台に枢支され、前座部の後端部と基台との間に伸縮手段(電動シリンダ)が介装される。
【0004】
前座部および後座部が前後に連なる着座状態から、伸縮手段が前側斜め上方へ作動(伸張)すると、前座部の後端側が押し上げられ、後座部との連結部を屈曲させながら前座部が基台との枢支点を中心に上方へ揺動することによって前側へ傾き、この動きに従って後座部がリンク機構に支えられながら前側斜め上方へ平行移動するようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−137639号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
このような従来の装置においては、座部に座る使用者は、後座部の前側斜め上方への平行移動に加え、前座部が前側へ傾斜するので、膝部が伸ばされるようになる。その状態で起立補助が終了するため、使用者の臀部が後座部に掛けたままとなる。言い換えれば、使用者は、腰部を伸ばしながら後座部から上体を起こし、足へ身体の重心を掛けて完全に立ち上がるに至る動作の補助が十分に得られない、という不具合が考えられる。
【0007】
この発明は、このような不具合に鑑みなされたものであり、使用者が着座姿勢から足に身体の重心を掛けて完全に立ち上がるに至る動作の十分な補助が得られる装置の提供を目的とする。
【課題を解決するための手段】
【0008】
この発明は、椅子に座る使用者が立ち上がる際の動作を補助する装置において、着座部と、前記着座部と別体の肘掛け部材と、前記着座部が略水平な着座状態から前記着座部の前端部を支点に前記着座部の後端側が立ち上がる倒立状態へ揺動可能に支持する第1連係機構と、第1連係機構を作動させる第1駆動手段と、前記肘掛け部材を前側斜め上方へ平行移動可能に支持する第2連係機構と、第2連係機構を作動させる第2駆動手段と、を備えることを特徴とする起立補助装置である。
【発明の効果】
【0009】
この発明においては、第1駆動手段および第1連係機構の作動により、着座部が略水平な着座状態から着座部の前端部を支点に着座部の後端側が立ち上がる倒立状態へ揺動すると、着座部の前方への傾斜に伴って使用者の臀部が前側斜め上方へ送り出されるため、使用者の腰部が伸ばされ、膝部が伸ばしやすくなり、上体が起こされるようになる。また、第2駆動手段および第2連係機構の作動により、着座部と別体の肘掛け部材が着座部の動きに追従するように前側斜め上方へ平行移動するため、使用者は、両脇の肘掛け部材に支えられながら上体が押し上げられ、負担を殆ど受けることなく膝部を伸ばしながら、身体の重心が足に掛かる完全な起立姿勢に立ち上がることができる。つまり、着座姿勢から起立姿勢に至る立ち上がり動作の補助が十分に得られる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施形態を示す斜視図である。
【図2】同じく正面図である。
【図3】同じく側面図である。
【図4】同じく背面図である。
【図5】同じく底面図である。
【図6】同じく制御装置の概要構成図である。
【図7】同じく制御内容を説明する特性図である。
【図8】同じく作動状態の説明図である。
【図9】同じく作動状態の説明図である。
【図10】同じく作動状態の説明図である。
【発明を実施するための形態】
【0011】
図に基づいて、この発明の実施形態に係る起立補助装置を説明する。
【0012】
起立補助装置は、足腰が弱った高齢者や病人など使用者が椅子に座った状態(着座姿勢)から起立姿勢へ移行する際の立ち上がる動作を補助するためのものであり、病院の座席や、電車など乗り物の優先席のほか、車椅子などへの適用が想定される。
【0013】
図は、起立補助装置として起立補助椅子への適用例を示すものである。以下の説明において、「前」,「後」,「左」,「右」とは、椅子に座る使用者を基準に指称するものとする。すなわち、使用者の正面が「前」であり、使用者の背後が「後」であり、使用者の左手が「左」であり、使用者の右手が「右」である。
【0014】
起立補助椅子10は、基台11と、基台11に支持される可動台12と、可動台12に支持される座部材13と、座部材13と別体の肘掛け部材14と、を備える。なお、座部材13(着座部15および背凭れ部16)のマットやクッション、肘掛け部材14のクッション、等を含む外装材については、図示を省略する。
【0015】
可動台12は、座部材13の後方に配置される基部18、座部材13の下方を前方へ延びるステイ19(第1連係機構30の支持部を構成する)、第3連係機構50のリンク杆51,52を枢支するブラケット20と、を備える。
【0016】
基部18は、左右1対のサイドメンバ18Aと、これらの間を連結する複数のクロスメンバ18Bと、から構成される。サイドメンバ18Aは、前後方向へ延びる中間部18aと、中間部18aの前端から上方へ延びる前側部18bと、中間部18aの後端から下方へ延びる後側部18cと、から構成される。サイドメンバ18Aは、側面(図3、参照)から見ると、棚状に形成される。
【0017】
ブラケット20は、側面(図3、参照)から見ると、コ字状に形成され、コ字状の両端を前方へ向けて各サイドメンバ18Aの前側部18bに取り付けられる。ステイ19は、側面(図3、参照)から見ると、L字状に形成され、L字状の長辺部19aを前方へ向けて基部18に固定される。
【0018】
基部18において、第1駆動手段21の一端を回動自在に支持する枢着部22と、第2駆動手段25の一端を回動自在に支持する枢着部26と、が左右方向の中間位置に備えられる。コ字状のブラケット20の両端に第3連係機構50のリンク杆51,52の一端を回動自在に支持する枢着部53,54が、ステイ19の先端部(前端部)に着座部15の前端部を回動自在に支持する枢着部37が配置される。
【0019】
座部材13は、使用者の臀部を受ける着座部15と、使用者の背中を支える背凭れ部16と、から構成される。着座部15は、ステイ19の先端部(前端部)の枢着部27(図9,図10、参照)を支点に上下方向へ揺動自在に支持される。着座部15の後端部に背凭れ部16の下端部が回動(屈伸)自在に枢着される。背凭れ部16を背後から支える支柱28が備えられる。支柱28は、背凭れ部16の背面に取り付けられ、下方へ延びる延長端にリンク杆29(図9,10、参照)の一端が枢支される。リンク杆29の他端は、基部18のステイ19の前端側(着座部15の枢着部27の後方)に枢支される。これらにより、可動台12と座部材13との間に第1連係機構30が構成される。
【0020】
第1駆動手段21は、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させる電動機(モータ)と、から構成される。第1駆動手段21は、一端(シリンダ側)が基部18の枢着部22に支持され、他端(ロッド側)が着座部15の後端側に配置される枢着部23(図9,図10、参照)に支持される。第1駆動手段21は、基部18の枢着部22(図3、参照)と着座部15の枢着部23との間において、シリンダおよびロッドが前側斜め上方へ向く姿勢に介装され、着座部15が略水平な着座状態からモータが伸側に作動すると、ロッドが伸張して着座部15の後端側を押し上げるようになっている。これにより、着座部15が略水平な着座状態から後端側が立ち上がる起立補助位置(補助動作の停止位置)へ揺動し、背凭れ部16との枢着部(背凭れ部16と着座部15との枢着点)を上昇させながら、リンク杆29が略水平な着座状態からステイ19との枢支点を中心に立ち上がる起立補助位置へ揺動するのである。起立補助位置においては、着座部15が鉛直に近い倒立状態となり、背凭れ部16は着座部15から鉛直に近い起立状態に伸び上がり、リンク杆29は倒立状態の着座部15と略平行となる(図10、参照)。
【0021】
肘掛け部材14は、上方(図1、参照)から見ると、U字状に形成され、U字状の両端が前方へ向く姿勢に配置される。U字状の対向する両辺部14a,14aの中間から下方へ支柱41が延ばされ、各支柱41の下部に第2連係機構40の枢着部46が備えられる。枢着部46は、枢支点を変えられるように複数の軸穴が所定方向(図示の場合、高さ方向)へ配列される。
【0022】
第2連係機構40は、平行な上下1対のリンク杆42,43(図8〜図9、参照)を備える。平行な上下1対のリンク杆42,43は、座部材13を挟む両側に配置される。基部18の各サイドメンバ18Aにおいて、前側部18bの上部に左右外側へ突出する枢着部44,45が配置される。上側のリンク杆42は、一端が支柱41側の枢着部46の上側の軸穴に挿入する軸部(図示せず)を介して回動自在に支持され、他端側がサイドメンバ18Aの上側の枢着部44に枢支される。下側のリンク杆43は、一端が支柱41側の枢着部46の下側の軸穴に挿入する軸部(図示せず)を介して回動自在に支持され、他端がサイドメンバ18Aの下側の枢着部45に枢支される。
【0023】
上側のリンク杆42の他端側は、枢着部44よりも後方へ延長され、これら延長部の先端間が横架部材47によって両側のリンク杆42が連結される。座部材13を挟む両側のリンク杆42,43は、上側のリンク杆42同士が横架部材47(図1、参照)によって連結するため、一体に作動するようになっている。横架部材47の中間に第2駆動手段25の枢着部27が配置される。
【0024】
第2駆動手段25は、第1駆動手段21と同じく、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させる電動機(モータ)と、から構成される。第2駆動手段25は、一端(シリンダ側)が基部18側の枢着部26に枢支される。枢着部26は、基部18の下部における左右方向の中間に配置される(図4、参照)。第2駆動手段25は、シリンダおよびロッドが略鉛直に立てられ、横架部材47の枢着部27に他端(ロッド側)が回動自在に連結される。
【0025】
平行な上下1対のリンク杆42,43が前方傾斜する着座状態(図8、参照)から、第2駆動手段25が縮側に作動すると、平行な上下1対のリンク杆42,43が略水平となる起立補助位置(補助動作の停止位置)へ作動する(図10、参照)。これにより、肘掛け部材14は、基部18に対して前側斜め上方へ弧状の軌跡をもって平行移動するようになっている。
【0026】
肘掛け部材14は、図示の場合、パイプ部材を用いてU字状に形成されるが、U字状の両辺部14a,14aの先端側は、U字状の本体側のパイプ部材14Aと別のパイプ部材14Bによって形成され、本体側のパイプ部材14Aの両端部にそれぞれ伸縮可能な嵌合状態に接続される。パイプ部材14A,14Bの内側において、本体側のパイプ部材14Aと先端側のパイプ部材14Bとの間に図示しないスプリング(バネ手段)が介装される。先端側のパイプ部材14Bの初期位置および伸出位置を規制するストッパ(図示せず)が備えられる。14bはグリップ(握持部)であり、先端側のパイプ部材14Aに形成される(図1、参照)。
【0027】
使用者がクリップ14bを掴み、上体が前方へ移動するに連れて肘掛け部材14の先端側のパイプ部材14Bが本体側のパイプ部材14Aから前方へ伸ばせるため、着座状態から起立補助位置までの間において、グリップ14bを放さずに握り続けられるので、歩行へ移行する際の動作を支えることが可能となる。
【0028】
基台11は、設置部61と脚柱部62とから構成され、椅子の脚部として機能する。設置部61は、床面に沿って前後方向へ延びる左右1対のサイドメンバ61a,61aと、これらの間を連結する複数のクロスメンバ61bと、から構成される。脚柱部62は、各サイドメンバ61a,61aの中間から脚柱62a,62aが鉛直に起立され、脚柱62a,62a間が横架部材63によって連結される。各脚柱62a,62aの上部に第3連係機構50の枢着部55,56が配置される。
【0029】
第3連係機構50は、平行な上下1対のリンク杆51,52を備える。上側のリンク杆51は、一端が脚柱部62の上側の枢着部55に回動自在に支持され、他端が可動台18におけるブラケット20の上側の枢着部53に回動自在に支持される。下側のリンク杆52は、一端が脚柱部62の下側の枢着部56に回動自在に支持され、他端が可動台12におけるブラケット20の下側の枢着部54に回動自在に支持される。
【0030】
平行な上下1対のリンク杆51,52は、座部材13を挟む両側に配置される。座部材13を挟む両側のリンク杆51,52は、上側のリンク杆51同士が横架部材57(図1、参照)によって連結するため、一体に作動するようになっている。横架部材57の中間に第3駆動手段60の枢着部65(図10、参照)が配置される。
【0031】
第3駆動手段60は、第1,2駆動手段21,25と同じく、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させる電動機(モータ)と、から構成される。第3駆動手段60は、一端(シリンダ側)が基台11側の枢着部66に枢支される。枢着部66は、設置部61におけるクロスメンバ61bの中間に配置される。第3駆動手段60は、シリンダおよびロッドが前側斜め上方へ向く姿勢に配置され、横架部材57の枢着部65に他端(ロッド側)が回動自在に連結される。
【0032】
平行な上下1対のリンク杆51,52が後方に傾く着座状態(図8、参照)から、第3駆動手段が伸側に作動すると、平行な上下1対のリンク杆51,52が前方に傾く起立補助位置(補助動作の停止位置)へ揺動する(図10、参照)。これにより、可動台12は、基台11に対して前側斜め上方へ弧状の軌跡をもって平行移動するようになっている。
【0033】
図6は 起立補助椅子10の制御装置を説明するものであり、操作部71と、補助動作の制御に必要なデータを格納する記憶部72と、コントローラ70と、を備える。コントローラ70は、操作部71の入力操作により、記憶部72からのデータ(信号)に基づいて、図7のように第1駆動手段21(図示のシリンダ1),第2駆動手段25(図示のシリンダ2),3駆動手段60(図示のシリンダ3)の作動を制御する。図7は、制御内容を例示する特性図である。各駆動手段21,25,60は、コントローラ70により、記憶部71の格納データに基づいて、起立補助作動のタイミング、ストローク、スピードが制御される。
【0034】
図7を参照しながら、図8〜図10に基づいて、起立補助椅子10の作動を説明する。使用者が座部材13に座った着座状態において、操作部71の入力操作により、起立補助の起動が指令されると、先ず始めに第3駆動手段60が伸張(起立補助作動)する。これに伴う第3連係機構50の作動により、平行な上下1対のリンク杆51,52が後側に傾く着座状態から前側に傾く起立補助位置(補助動作の停止位置)へ揺動し、その動きに連れて可動台12が所定の軌跡をもって上方へ平行移動する。この可動台12の動きに伴って座部材13が基台11に対して上昇するため、着座部15に座る使用者の屈曲した膝部が次第に伸ばされる。
【0035】
第3駆動手段60に遅れて第1駆動手段21が伸張(起立補助作動)する。これに伴う第1連係機構の作動により、着座部15は、後端側が第1駆動手段21によって前側斜め上方へ押し上げられ、前端部の枢着点27を中心に上方へ揺動する。これに伴って背凭れ部16が着座部15の上方へ伸び上がってくるので、着座部15に座る使用者の腰部が伸ばされ、背筋も前方へ押されるようになる。第3駆動手段60の作動に基づく可動台12の上昇に第1駆動手段21の作動に基づく座部材13の揺動が加わるため、使用者の膝部から腰部が伸ばされ、背筋が立ってくるので、使用者の身体の重心が足へ次第に掛かるようになる。
【0036】
第1駆動手段21と同時に第2駆動手段25が収縮(起立補助作動)する。これに伴う第2連係機構40の作動により、平行な上下1対のリンク杆41,42が前側に傾く着座状態から略水平な起立補助位置(補助動作の停止位置)へ揺動し、その動きに連れて肘掛け部材が所定の軌跡をもって前側斜め上方へ平行移動する。第1駆動手段21の作動に基づく座部材13の着座部15および背凭れ部16の動作に追従するように肘掛け部材16が前側斜め上方へ平行移動するので、使用者は、両脇の肘掛け部材16の動きによって上体が押し上げられ、着座部15および背凭れ部16の動きによって前方へ送り出されるようになる。このため、身体の重心が足に掛かる完全な起立姿勢に立ち上がることができる。つまり、使用者は、着座姿勢から起立姿勢に至る立ち上がり動作の補助が十分に得られる。
【0037】
第1駆動手段21および第3駆動手段60は、起立補助の停止位置に達すると、伸張が停止される。第2駆動手段25は、第1駆動手段21および第3駆動手段60の作動が停止する時点を挟む前後において、収縮から伸張へ作動が切り替えられ、肘掛け部材16の高さを下げて起立補助の停止位置に達すると、作動が停止される(図7のシリンダ2、参照)。これにより、使用者がグリップ14bを握っていると、肘掛け部材16の高さが下がることで肘部が自然に伸ばせるので、上体が立ってくるに連れてグリップ16をちょうど杖のようにして身体を支えることができる。従って、起立姿勢からさらに歩行動作へ無理なく円滑に移行しえるようになる。
【0038】
第1連係機構30は、背凭れ部16やリンク杆29を含めて構成される。第2連係機構40は、平行な上下1対のリンク杵41、42を含めて構成される。第3連係機構50は、平行な上下1対のリンク杵51、52を含めて構成される。
【0039】
この実施形態においては、基台11,座部材13,肘掛け部材14のほか、可動台12を備えるので、第1駆動手段21,第2駆動手段25,第3駆動手段60は、基台11に集中させることなく簡単かつ容易に配置(レイアウト)することができる。第1連係機構30および第1駆動手段21は、可動台12と着座部15との間に介装され、第2連係機構40および第2駆動手段25は、可動台12と肘掛け部材16との間に介装され、第3連係機構50および第3駆動手段60は、基台11と可動台12との間に介装されるので、座部材13,肘掛け部材14,可動台12を補助動作の停止位置から初期位置へ復帰させる際においては、各駆動手段21,25,60を同期的に作動させても、これらの動きが互いに干渉するようなこともなく、迅速な復帰が可能となる。
【0040】
肘掛け部材14は、支柱38の下部に配置される枢着部46が枢支点を変えられるようになっているので、肘掛け部材14の高さを使用者の体形などに合わせて調整することができる。記憶部71に格納されるデータに基づく制御特性(図7、参照)についても、使用者の体形などに適する特性が得られるようにすると良い。そのため、記憶部71に体形などを変数とする複数のデータを格納しておき、操作部71の入力操作によって体形などに適する特性を任意に選択可能な設定とすることが考えられる。
【0041】
第1駆動手段21,第2駆動手段25,第3駆動手段60は、シリンダにロッドを伸縮させるモータを備えるもの(電動シリンダ)が用いられるが、これに限定されるものでなく、全部または一部を別の伸縮手段(ガスダンパなど)に代えても良い。
【産業上の利用可能性】
【0042】
この発明は、椅子に限らず、着座部があって、着座部に座る使用者が起立姿勢へ立ち上がる動作の補助が必要な各種の設備の着座姿勢から起立姿勢への移行を補助する装置へ広く適用することができる。
【符号の説明】
【0043】
11 基台
12 可動台
13 座部材
14 肘掛け部材
15 着座部材
16 背凭れ部
21 第1駆動手段
25 第2駆動手段
30 第1連係機構
40 第2連係機構
50 第3連係機構
60 第3駆動手段
【特許請求の範囲】
【請求項1】
椅子に座る使用者が立ち上がる際の動作を補助する装置において、着座部と、前記着座部と別体の肘掛け部材と、前記着座部が略水平な着座状態から前記着座部の前端部を支点に前記着座部の後端側が立ち上がる倒立状態へ揺動可能に支持する第1連係機構と、第1連係機構を作動させる第1駆動手段と、前記肘掛け部材を前側斜め上方へ平行移動可能に支持する第2連係機構と、前記第2連係機構を作動させる第2駆動手段と、を備えることを特徴とする起立補助装置。
【請求項2】
基台と、可動台と、を備え、前記第1連係機構および前記第1駆動手段は、前記可動台と前記着座部との間に介装され、前記第2連係機構および前記第2駆動手段は、前記可動台と前記肘掛け部材との間に介装され、前記可動台を前側斜め上方へ平行移動可能に支持する第3連係機構と、前記第3連係機構を作動させる第3駆動手段と、を備え、前記第3連係機構および第3駆動手段は、前記基台と前記可動台との間に介装されることを特徴とする請求項1に記載の起立補助装置。
【請求項3】
前記第1連係機構は、前記着座部の背凭れ部を前記着座部が倒立状態へ揺動するに連れて前記背凭れ部が前記着座部の上方へ伸び上がってくるように支持する手段を備えることを特徴とする請求項1または請求項2に記載の起立補助装置。
【請求項4】
前記肘掛け部材は、前後方向へ伸縮可能に構成されることを特徴とする請求項1〜請求項3の何れか1つに記載の起立補助装置。
【請求項5】
前記第1駆動手段〜前記第3駆動手段は、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させるモータと、から構成されることを特徴とする請求項2〜請求項4に記載の起立補助装置。
【請求項6】
前記第1駆動手段〜前記第3駆動手段の作動を制御する手段を備えることを特徴とする請求項2〜請求項5の何れか1つに記載の起立補助装置。
【請求項1】
椅子に座る使用者が立ち上がる際の動作を補助する装置において、着座部と、前記着座部と別体の肘掛け部材と、前記着座部が略水平な着座状態から前記着座部の前端部を支点に前記着座部の後端側が立ち上がる倒立状態へ揺動可能に支持する第1連係機構と、第1連係機構を作動させる第1駆動手段と、前記肘掛け部材を前側斜め上方へ平行移動可能に支持する第2連係機構と、前記第2連係機構を作動させる第2駆動手段と、を備えることを特徴とする起立補助装置。
【請求項2】
基台と、可動台と、を備え、前記第1連係機構および前記第1駆動手段は、前記可動台と前記着座部との間に介装され、前記第2連係機構および前記第2駆動手段は、前記可動台と前記肘掛け部材との間に介装され、前記可動台を前側斜め上方へ平行移動可能に支持する第3連係機構と、前記第3連係機構を作動させる第3駆動手段と、を備え、前記第3連係機構および第3駆動手段は、前記基台と前記可動台との間に介装されることを特徴とする請求項1に記載の起立補助装置。
【請求項3】
前記第1連係機構は、前記着座部の背凭れ部を前記着座部が倒立状態へ揺動するに連れて前記背凭れ部が前記着座部の上方へ伸び上がってくるように支持する手段を備えることを特徴とする請求項1または請求項2に記載の起立補助装置。
【請求項4】
前記肘掛け部材は、前後方向へ伸縮可能に構成されることを特徴とする請求項1〜請求項3の何れか1つに記載の起立補助装置。
【請求項5】
前記第1駆動手段〜前記第3駆動手段は、シリンダと、シリンダに伸縮可能なロッドと、ロッドを伸縮させるモータと、から構成されることを特徴とする請求項2〜請求項4に記載の起立補助装置。
【請求項6】
前記第1駆動手段〜前記第3駆動手段の作動を制御する手段を備えることを特徴とする請求項2〜請求項5の何れか1つに記載の起立補助装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−213434(P2012−213434A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−79198(P2011−79198)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
[ Back to top ]