
足底機構
【課題】斜面歩行を支援する足底機構を提供する。
【解決手段】足底機構10は、一対の袋体26a、26bと、ソール板14と、流路24と、バルブ22を備える、一対の袋体は、足底の前後に配置されており、膨張収縮が可能である。ソール板14は、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化する。流路24は、一対の袋体を連通する。バルブ22は、流路を開閉する。バルブ22は、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。バルブ22が開いている間に流体の移動によってソール板14が斜面に合わせて傾斜し、バルブ22が閉じるとソール板14の傾斜が固定される。ソール板14が固定されると、ユーザの足裏を水平に保ち易くなる。
【解決手段】足底機構10は、一対の袋体26a、26bと、ソール板14と、流路24と、バルブ22を備える、一対の袋体は、足底の前後に配置されており、膨張収縮が可能である。ソール板14は、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化する。流路24は、一対の袋体を連通する。バルブ22は、流路を開閉する。バルブ22は、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。バルブ22が開いている間に流体の移動によってソール板14が斜面に合わせて傾斜し、バルブ22が閉じるとソール板14の傾斜が固定される。ソール板14が固定されると、ユーザの足裏を水平に保ち易くなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行動作を支援する足底機構に関する。この足底機構は、脚式ロボットの足の一部として構成されるか、或いは、靴の底部分に構築され、脚式ロボット或いは人間の歩行動作を支援する。
【背景技術】
【0002】
歩行動作を支援する足底機構が提案されている。例えば特許文献1には、足底の前後にクッションを配置した靴が提案されている。足底の2つのクッションは流路によって連通しており、前方(後方)のクッションが収縮すると後方(前方)のクッションが膨張する。特許文献1の靴は、着地時の衝撃を和らげることができるとともに、立脚から遊脚へ遷移する際につま先に荷重が加わることで踵を持ち上げる効果がある。
【0003】
また、特許文献2には、足裏全体を柔軟な構造にして地面の細かい起伏にフィットするように構成した脚式ロボットが提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭57−177703号公報
【特許文献2】特開2005−177960号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術は、踵側に比べてつま先の荷重が強まるとつま先側のクッションが収縮するとともに踵側のクッションが膨張する。逆に、つま先に比べて踵側の荷重が強まると踵側のクッションが収縮するとともにつま先側のクッションが膨張する。すなわち、足底の荷重分布に応じてクッションが膨張収縮する。特許文献2の技術は、地面の細かい起伏に応じて足裏面が変形する。即ち、特許文献2の技術も、足底の荷重分布に応じて足裏面の形状が変化する。それらの技術は、それぞれの目的を果すことはできるが、斜面を歩行する際の特有の課題に対しては考慮されていない。斜面を歩行する際の特有の課題とは、足裏が歩行面にしっかり密着するとき(即ち、体重を支えるとき)の足首関節の角度が水平面歩行時と異なることである。即ち、斜面を歩行する際には、足裏面を斜面の角度に合わせなければならない。そのような動作は、高齢者或いは歩行が不自由な者にとっては負担となり得る。また脚式ロボットの場合、足首関節の角度を歩行面の斜度に合わせるためのアルゴリズムが必要となる。本明細書が開示す技術は、斜面歩行を支援する足底機構を提供する。
【課題を解決するための手段】
【0006】
本明細書が開示する足底機構は、歩行面の傾斜によらずに、接地した足の足底を水平に保つことができる。なお、より厳密には、本明細書が開示する足底機構は、歩行面の傾斜によらず、接地した足の足底を水平に戻すように復元力を発生させることができる。その足底機構は、足底の前後に配置された膨張収縮が可能な一対の袋体と、一対の袋体の下側に取り付けられたソール板と、一対の袋体を連通する流路と、流路を開閉するバルブを備える。ここで、「足底」とは、靴の底、或いは、ロボットの足平リンクの底面を意味する。袋体は、例えばゴムで形成された風船でよい。ソール板は、袋体の膨張収縮に応じて傾きが変化する。即ち、バルブを開くと、一対の袋体の間で内部の流体が移動でき、ソール板が傾斜する。バルブを閉じると、流体が移動することができなくなり、ソール体の傾斜が固定される。即ち、足底機構のバルブは、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合にはバルブが開いており、荷重が荷重閾値を超えた場合に前記バルブが閉じる。足が着地する際、荷重閾値を超えるまではバルブが開いており歩行面の斜度に合わせてソール板が傾斜する。荷重閾値を超えるとバルブが閉じ、足裏に対するソール板の傾斜が固定する。ここで、「固定する」とは、厳密に不動となることではなく、ソール板がさらに傾斜したときに流体が移動しない一対の袋体の復元力によって戻るべき傾斜角が決まることを意味する。即ち、バルブが閉じたときのソール板の傾斜角度が、ばね系における「中立点」に相当する。バルブが閉じた後は、体重移動による荷重変化が生じて足裏が傾斜しても、圧縮/膨張した各袋体によって、足裏面を水平に戻す方向の復元力が作用する。上記した足底機構は特に、荷重が高くなるとソール板の傾斜が固定し(中立点が設定され)、足裏の水平を保つことができる。
【0007】
上記の足底機構を採用すると、斜面を歩行する際、体重を支えるほどに荷重が増したときに、ユーザの足または脚式ロボットの足部の水平を容易に保つことができる。即ち、上記の足底機構を採用すると、階段を上り下りするように斜面を歩行することができる。
【0008】
バルブの開閉は、センサやコントローラを使って能動的に行ってもよいし、足裏に加わる荷重が閾値を超えると受動的にバルブが閉じる機構を採用してもよい。前者の場合、足底機構は荷重センサを備えるとともにソレノイドなどで動作する開閉弁をバルブに備える。そしてコントローラは、荷重センサが検知する荷重が荷重閾値を超えるとソレノイドを駆動してバルブを閉じる。荷重が荷重閾値を下回っている場合は、バルブは開放される。後者の場合は、ソール板自体が足に対して上下動するとともにバルブの開閉弁がソール板に機構的に連結しており、ソール板の上下動に連動してバルブを開閉するメカニカル機構を採用すればよい。或いは、バルブ開閉弁に連結されたロッドをソール板から下方に突出させ、ロッドが引っ込むと開閉弁がバルブを閉じるメカニズムを採用すればよい。ソール板或いはロッドはばねによって足底に支持されておりばねの弾性率によって上記の「荷重閾値」が実現される。
【0009】
上記の足底機構は、流路を通して袋体内部の流体を一対の袋体の間で移動させるポンプをさらに備えることが好ましい。ポンプによって流体を移動させ、ソール板を能動的に傾斜させることができる。すなわち、ポンプは、ソール板を傾斜させるアクチュエータに相当する。
【0010】
上述の足底機構は、前後方向の傾斜に対して(接地している足の)足裏の水平を維持することができる。前述したように、「足裏の水平を維持する」とは、足裏の水平が中立点となるようソール板を傾斜させることを意味することに留意されたい。この足底機構の技術的思想は、前後方向だけでなく、横方向の傾斜に対して足裏の水平を維持する装置に拡張することができる。なお、ここで「横方向」とは、つま先と踵を結ぶ直線と交差する方向を意味する。横方向の傾斜に適応することのできる足底機構は、一対の袋体を結ぶ直線から横方向に離れた位置で足底に配置された第3袋体と、一対の袋体の夫々と第3袋体を連通する流路と、各流路の夫々に備えられており各流路を開閉するバルブをさらに備えていればよい。各流路を開閉する夫々のバルブは、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。一直線上に並んでいない3個の袋体の膨張収縮によってソール板はピッチ軸とロール軸の2軸周りに傾斜することができる。即ち、そのような足底機構は、どのような方向に傾斜している斜面に対してもソール板を傾斜させることによって足底面の水平を保持し易くすることができる。
【図面の簡単な説明】
【0011】
【図1】第1実施例の足底機構の模式的機構図を示す。
【図2】第1実施例の足底機構の動きを説明する図である(1)。
【図3】第1実施例の足底機構の動きを説明する図である(2)。
【図4】第2実施例の足底機構の模式的機構図を示す。
【図5】第3実施例の足底機構の模式的機構図を示す。
【図6】第4実施例の足底機構の模式的平面図を示す。
【図7】第5実施例の足底機構の模式的機構図を示す。
【実施例1】
【0012】
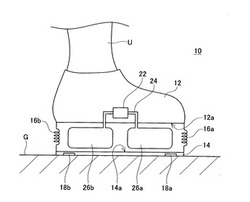
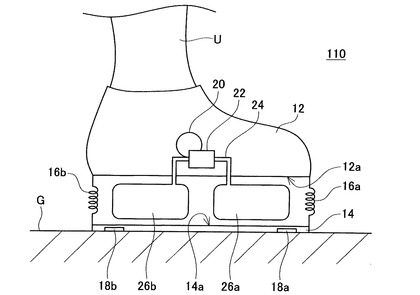
図1に、第1実施例の足底機構10を示す。この足底機構10は、ユーザUが履く靴12の一部として構成されている。靴12の下側に、ばね16a、16bを介してソール板14が配置されている。靴12とソール板14の間に一対の袋体26a、26bが配置されている。即ち、一対の袋体26a、26bを挟んで靴12の底面とソール板14が対向している。詳しくは後述するが、一対の袋体26a、26bの一方が膨張するとともに他方が収縮することによって、ソール板14は靴12の底面に対して傾斜する。一対の袋体26a、26bは、内部に空気が充填されているゴム風船である。
【0013】
一対の袋体26a、26bは、流路24で結ばれている。流路24は、一対の袋体26a、26bの内部の流体を通す管である。流路24を介して一方の袋体から他方の袋体へ内部の流体が移動することができる。さらに流路24には、流路を開閉するバルブ22(即ち、流体通過の許容と禁止を切り換えるバルブ)が備えられている。なお、図1は、足底機構10の機構を模式的に示す図であって、足底機構10の物理的構造を厳密には表していない。例えば、袋体26a、26bの周囲は柔軟なカバーで覆われており、袋体26aと26bは外からは見えない。また、袋体26a、26bの上側は靴12の底面12aに接しており、袋体26a、26bの下側はソール板14の上面14aに接している。また、流路24とバルブ22は、靴12の内部に配置されているのではなく、例えば靴12の甲の上、或いは踵の後ろ側に配置されている。図では、機能を理解し易いように、バルブ22を靴12の中央付近に描いてある。
【0014】
ソール板14には、前方(つま先側)と後方(踵側)に夫々荷重センサ18a、18bが配置されている。荷重センサ18a、18bは、足底が歩行面Gから受ける荷重を計測する。また、図示を省略しているが、靴12はコントローラを備える。コントローラは、荷重センサ18a、18bの計測値に基づいて、バルブ22の開閉を制御する。
【0015】
ソール板14は、2つのばね16a、16bによって、靴12側に引っ張られている。ばね16a、16bによって、ソール板14が一対の袋体26a、26bに押し付けられている。そのため、一対の袋体26a、26bの膨張収縮に応じてソール板14は靴12に対して傾く。一方の袋体26aはつま先側に配置され、他方の袋体26bは踵側に配置されており、両者の内部流体(空気)は流路24を通じて一方の袋体から他方の袋体へ移動することができる。即ち、つま先側の袋体26aが収縮するとともに踵側の袋体26bが膨張すると、ソール板14は前方が靴12に近づき後方が靴12から離れるように傾斜する(図2参照)。逆に、つま先側の袋体26aが膨張するとともに踵側の袋体26bが収縮すると、ソール板14は前方が靴12から離れ後方が靴12に近づくように傾斜する(図3参照)。いずれの場合も、ソール板14は、靴12に対して相対的に、ピッチ軸回りに傾斜する。なお、「ピッチ軸」とは、ロボットの技術分野でよく知られているように、ユーザ(或いはロボット)の側方に伸びる軸を意味する。
【0016】
バルブ22の機能について説明する。コントローラ(不図示)は、前後に配置された荷重センサ18a、18bが検知する荷重の大きさによってバルブ22を制御する。コントローラは、荷重センサ18aと18bが検知する荷重の平均値が予め定められた荷重閾値を超えるまではバルブ22を開いておく。コントローラは荷重の平均値が荷重閾値を超えるとバルブ22を閉じる。荷重閾値は、予め設定されており、例えば、ユーザの体重の15%の大きさである。
【0017】
例えば、足底機構10が地面を蹴って離床する瞬間では、荷重センサ18aと18bが検知する荷重の平均値は必ず荷重閾値(例えばユーザの体重の15%)未満になる。荷重の平均値が荷重閾値を下回っている間、コントローラはバルブ22を開放する。離床時は踵側の荷重よりつま先側の荷重の方が大きい。従って、荷重の差によってつま先側の袋体26aが収縮し踵側の袋体26bが膨張する。即ち、流路24を通じて内部流体がつま先側の袋体26aから踵側の袋体26bへ移動する。
【0018】
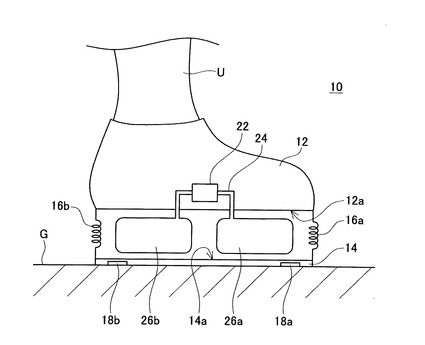
図2に、登り坂を歩行する際のソール板14の傾斜の様子を例示し、図3に、下り坂を歩行する際のソール板14の傾斜の様子を例示する。登り坂を歩行する場合、着地時には先につま先が接地する。そのため、つま先側に加わる荷重が踵側に加わる荷重よりも大きくなる。荷重の差によってつま先側の袋体26aが収縮し踵側の袋体26bが膨張する。コントローラによってバルブ22が開放されている間、荷重が大きいつま先側の袋体26aから荷重の小さい踵側の袋体26bへ内部流体が流れる。その結果、図2に示すように、ソール板14は、つま先側が靴12に近くなり、踵側が靴12から離れるように傾斜する。
【0019】
遊脚だった足が着地し体重が加わっていくにつれて、踵側の荷重が増大する。前後2つの荷重センサの計測値の平均値がユーザの体重の15%を超えると、コントローラはポンプ20を停止する。なお、コントローラは、荷重センサの計測値の平均値がユーザの体重の15%を下回っている間は、バルブ22を開放している。
【0020】
バルブ22を閉じると、一対の袋体26a、26bの間を流体が流れることができなくなる。その結果、靴12に対するソール板14の傾斜が固定する。図2に示すように、ソール板14は歩行面Gの傾斜に合わせて傾斜するが、接地している靴12の底は水平を維持する。体重移動などにより、つま先側と踵側の荷重が変化すると、靴12が傾斜し、夫々の袋体26a、26bが圧縮或いは膨張する。ここで、バルブ22が閉じているのでそれぞれの袋体は独立に密封されており、夫々が弾性体として機能する。即ち、靴12を水平に戻す向きに復元力が発生する。この復元力によってユーザは靴21を水平に戻し易くなる。即ち、ユーザは接地した足の足底を水平に維持したまま登り坂を登ることができる。図2に示すように、ユーザは、あたかも階段を登るように登り坂を歩行することができる。
【0021】
歩行する場合、登り坂・下り坂のいずれにおいても通常は踵から着地する。しかし、登り坂を歩行する場合は平地での歩行に比べて踵が接地してからつま先が接地するまでの時間が短くなる。場合によってはつま先から接地することもある。つまり、つま先側の荷重センサ18aの計測値と踵側の荷重センサ18bの計測値が近い状態で荷重閾値を超える。そのため、登り坂の傾斜が大きいほど、踵側の袋体26bからつま先側の袋体26aへ流れる内部流体の量が少なくなる。その結果、図2に示すように、ソール板14はつま先側が靴12に近くなるとともに、踵側が靴12から離れるように傾斜した状態で固定される(バルブ22が閉じる)。なお、踵よりもつま先が先に接地する場合には、内部流体はつま先側から踵側に移動する。
【0022】
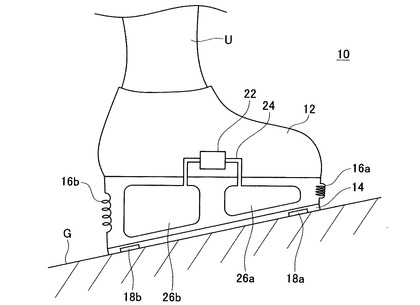
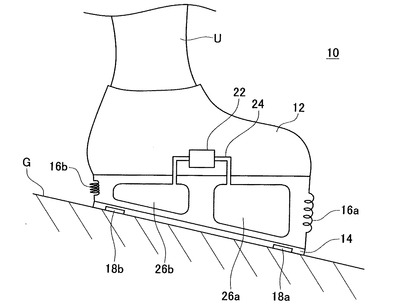
下り坂を歩行する場合の着地では、平地歩行に比べて踵が接地してからつま先が接地するまでの時間が長くなる。そのため、踵側の荷重がつま先側の荷重よりも大きくなっている時間が長くなる。踵側の袋体26bが収縮し、つま先側の袋体26aが膨張する。コントローラがバルブ22を開いている間、荷重の大きい踵側の袋体26bから荷重の小さいつま先側の袋体26aへ内部流体が流れる。その結果、図3に示すように、ソール板14は、踵側が靴12に近くなり、つま先側が靴12から離れるように傾斜する。
【0023】
2つの荷重センサ18a、18bの計測値の平均値がユーザの体重の15%を超えると、コントローラはバルブ22を閉じる。その結果、靴12に対するソール板14の傾斜が固定する。図3に示すように、ソール板14は歩行面Gの傾斜に合わせて傾斜するが、靴12の底は水平を維持する。登り坂の場合と同様に、足底機構10は靴12を水平に維持するように復元力を発生する。即ち、ユーザは接地したときの足底を水平に維持したまま下り坂を登ることができる。図2に示すように、ユーザは、あたかも階段を登るように下り坂を歩行することができる。このように足底機構10は、斜面を歩行する際、ユーザの足裏の水平を容易に維持することができる。
【実施例2】
【0024】
図4を参照して第2実施例の足底機構110を説明する。図4は、足底機構110の模式的な側面図である。第2実施例の足底機構110は、第1実施例の足底機構10に加えてポンプ20を備えている。コントローラ(不図示)は、前後の荷重センサの計測値を比較し、計測値(荷重)が大きい側に位置する袋体から計測値(荷重)が小さい側の袋体へ内部流体(空気)が流れるようにポンプ20を制御する。第1実施例の足底機構10は、つま先と踵に加わる荷重差によって内部流体が前後の袋体26の間を移動する。第2実施例の足底機構110は、ポンプ209が積極的に内部流体を移動させる。即ち、第2実施例の足底機構110は、第1実施例の足底機構10よりも積極的に、着地する際にソール板14が歩行面Gの傾斜に応じて傾斜する。
【0025】
登り坂を歩行する場合、着地時には先につま先が接地する。そのため、つま先側の荷重センサ18aの計測値が踵側の荷重センサ18bの計測値よりも大きくなる。コントローラは、計測値の大きいつま先側の袋体26aから計測値の小さい踵側の袋体26bへ内部流体が流れるようにポンプ20を駆動する。つま先側の袋体26aが収縮し、踵側の袋体26bが膨張する。その結果、ソール板14は、つま先側が靴12に近くなり、踵側が靴12から離れるように傾斜する。
【0026】
遊脚だった足が着地し体重が加わっていくにつれて、踵側の荷重センサ18bが計測する荷重も増大する。前後2つの荷重センサの計測値の平均値がユーザの体重の50%を超えると、コントローラはポンプ20を停止するとともにバルブ22を閉じる。なお、コントローラは、荷重センサの計測値の平均値がユーザの体重の15%を下回っている間は、バルブ22を開放している。
【0027】
バルブ22を閉じると、一対の袋体26a、26bの間を流体が流れることができなくなる。その結果、靴12に対するソール板14の傾斜が固定する。ソール板14は歩行面Gの傾斜に合わせて傾斜するが、接地している靴12の底は水平を維持する。体重移動などにより、つま先側と踵側の荷重が変化すると、靴12が傾斜し、夫々の袋体26a、26bが圧縮或いは膨張する。ここで、バルブ22が閉じているのでそれぞれの袋体は独立に密封されており、夫々が弾性体として機能する。即ち、靴12を水平に戻す向きに復元力が発生する。この復元力によってユーザは靴21を水平に戻し易くなる。即ち、ユーザは接地した足の足底を水平に維持したまま登り坂を登ることができる。
【0028】
下り坂を歩行する場合、着地時には先に踵が接地する。そのため、踵側の荷重センサ18bの計測値はつま先側の荷重センサ18aの計測値よりも大きくなる。コントローラは、計測値の大きい踵側の袋体26bから計測値の小さいつま先側の袋体26aへ内部流体が流れるようにポンプ20を駆動する。踵側の袋体26bが収縮し、つま先側の袋体26aが膨張する。その結果、図3に示すように、ソール板14は、踵側が靴12に近くなり、つま先側が靴12から離れるように傾斜する。
【0029】
2つの荷重センサ18a、18bの計測値の平均値がユーザの体重の15%を超えると、コントローラはポンプ20を停止するとともにバルブ22を閉じる。その結果、靴12に対するソール板14の傾斜が固定する。ソール板14は歩行面Gの傾斜に合わせて傾斜するが、靴12の底は水平を維持する。登り坂の場合と同様に、足底機構110は靴12を水平に維持するように復元力を発生する。即ち、ユーザは接地したときの足底を水平に維持したまま下り坂を登ることができる。
【実施例3】
【0030】
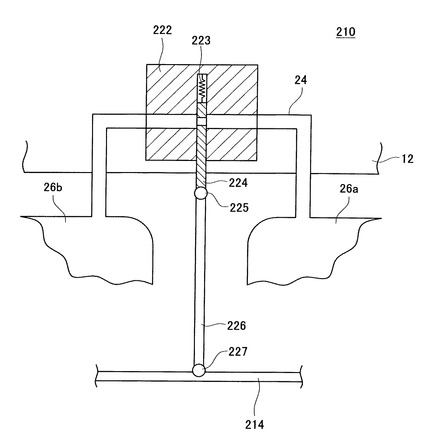
図5を参照して第3実施例の足底機構210を説明する。図5は、足底機構210の模式的な機構図である。ただし、図5は、バルブ222周辺の拡大図を示しており、足底機構全体を示していないことに留意されたい。図5に示されていない部分は、図3の足底機構110と同様の形態を備えている。また、図5では、バルブ222のみ、断面を示している。また、バルブ222は、靴12の内部ではなく、靴12の下方であり一対の袋体26a、26bの間に配置されている。図5は、機能の理解を助けるために、バルブ222の位置を図3に合わせて描いており、物理的配置を正確には示していないことに留意されたい。
【0031】
第3実施例の足底機構210は、動力を使わずにバルブ222を閉じることができる。即ち足底機構210は、動力を使わずにソール板214の傾きを固定することができる。なお、より厳密には、靴12が水平となるときが、袋体26a、26bの復元力による中立位置となるように、ソール板214の傾斜角が定まる。以下では簡単のため、中立点となるソール板の傾斜角が定まることを「ソール板の傾斜が固定する」と表現する場合がある。バルブ222は、ばね223で下方に付勢されている開閉弁224を備える。開閉弁224が下方に位置するとき、バルブ222は開放状態となり、開閉弁224が上方に移動するとバルブ222が閉じる。開閉弁224の下端はジョイント225を介してロッド226の上端に連結されている。ロッド226の下端はジョイント227を介してソール板214に連結されている。ジョイント225、ロッド226、及び、ジョイント227は、ソール板214の前後後方のほぼ中央に位置している。従って、ソール板214はジョイント227を中心に前後に(ピッチ軸回りに)傾くことができる。
【0032】
足底機構210を装着した足が遊脚の間は、ソール板214は歩行面から圧力を受けることがない。従ってばね223によって開閉弁224は下側に位置し、バルブ222は開いた状態となる。足底機構210を装着した足が着地する際、ソール板214が接地し、ソール板214は歩行面から圧力を受ける。ソール板214は、歩行面からの圧力によって、ばね223に抗しながらも靴12に接近する。歩行面からの圧力が予め定められた荷重閾値に達すると、ソール板214とともに開閉弁224が上方に移動し、バルブ222が閉じる。バルブ222が閉じるまでの間、流路24を通じて流体が一対の袋体26a、26bの間を移動し、歩行面の斜度に応じてソール板214が傾斜する。歩行面からの圧力が予め定められた荷重閾値に達すると、バルブ222が閉じて流体が移動できなくなり、ソール板214の傾斜が固定する。第2実施例の足底機構210は、動力(電力)を要することなく、着地すると床面からの荷重によって受動的にバルブ222が閉じ、ソール板214の傾斜が固定する。なお、第3実施例の足底機構210は、第3実施例の足底機構110が有するポンプ20を備えていない。第3実施例の足底機構210は、第1実施例の足底機構10と同様に、つま先側と踵側の接地荷重の差によって流体が一方の袋体から他方の袋体へ移動する。
【実施例4】
【0033】
図6を参照して第4実施例の足底機構310を示す。図6は、足底機構310の模式的平面図を示す。足底機構310は、一対の袋体326aと326bの他、第3の袋体326cを備える。一対の袋体326aと326bは、第2実施例の足底機構110と同様に、足の前後に配置されている。第3の袋体326cは、前方の袋体326aの横に配置されている。詳しくは、第3の袋体326cは、一対の袋体326a、326bを結ぶ直線から横方向に離れた位置に配置されている。3つの袋体326a、326b、及び、326cは夫々流路324a、324b、及び、324cによって連結されている。詳しくは、袋体326aと袋体326bが流路324bによって連結されており、袋体326bと326cが流路324cによって連結されており、袋体326cと326aが流路324aによって連結されている。流路324aには流路を開閉するバルブ322aと、袋体326aと326cの間で流体を移動させるポンプ320aが配置されている。流路324bには流路を開閉するバルブ322bと、袋体326aと326bの間で流体を移動させるポンプ320bが配置されている。流路324cには流路を開閉するバルブ322cと、袋体326bと326cの間で流体を移動させるポンプ320cが配置されている。この足底機構310は、歩行面のピッチ軸回りの傾斜のみならず、ロール軸(ユーザの前後方向に伸びる軸)周りの歩行面の傾斜に対してもソール板314を傾斜させることができる。別言すれば、足底機構310は、ピッチ軸のみならずロール軸周りの歩行面の傾斜に対してソール板314を傾斜させることができ、接地したユーザの足裏の水平を維持することができる。ソール板314を傾斜させる原理は、第2実施例の足底機構10の原理と同じである。
【実施例5】
【0034】
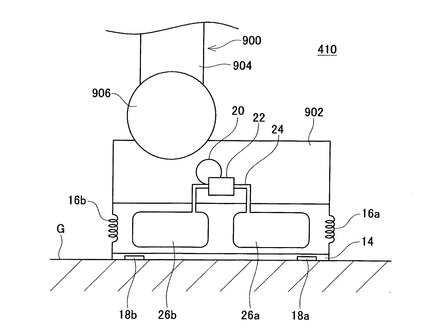
図7を参照して第5実施例の足底機構410を説明する。この足底機構410は、ロボット900の足裏に構築される。ロボット900は脚式ロボットであり、下腿リンク904と足平リンク902が足首ジョイント906によって連結されている。図示を省略しているが、下腿リンク904の上方は膝ジョイントを介して大腿リンクが連結されている。即ち、ロボット900は、人間の脚の構造を模した脚式ロボットである。足平リンク902に設けられた足底機構410の構造は全て第2実施例の足底機構110と同じであるので説明は省略する。なお、第1実施例の部品と同じ部品には同じ符号を付してある。
【0035】
足底機構410を備えたロボット900は、斜面を歩行する際、ソール板14が斜面に応じて傾斜するので、接地した足平902の水平を維持することができる。従って、ロボット900は斜面を歩行する際、足首ジョイント906の角度は水平面歩行時の角度と同じでよい。従って、歩行制御(歩行するための各ジョイントの制御)が容易になる。
【0036】
実施例の足底機構の変形例を説明する。荷重センサ18a、18bの代わりに、距離センサを配置してもよい。その場合、足底機構は、つま先側と踵側にソール板と歩行面との間の距離を計測する距離センサを備え、コントローラはポンプを制御し、前後の距離センサの計測値が等しくなるようにソール板を傾斜させる。そのような距離センサに基づく制御によっても、実施例の足底機構と同様に斜面の歩行を支援することができる。
【0037】
第1実施例の足底機構10において、コントローラは、2つの荷重センサ18a、18bの夫々が検出する荷重の差が大きいほどバルブの開度を大きくすることも好適である。バルブの開度が大きい程、流路24を流れる流体の流量が増加する。歩行面Gとソール板14の角度が大きいほど、2つの荷重センサ18a、18bの夫々が検出する荷重の差が大きくなる。上記のようにバルブを制御することによって、歩行面Gとソール板14の角度が大きいほど、流量が増大し、ソール板14が迅速に歩行面Gと平行になる。同じ理由により、第2実施例の足底機構110において、コントローラは、2つの荷重センサ18a、18bの夫々が検出する荷重の差が大きいほど流路24を流れる流体の流量が増大するようにポンプ20を制御することも好適である。
【0038】
第3実施例ではロッド226をソール板214に連結した。これに代えてロッド226をソール板214から下方に突出するように構成してもよい。ロッド226が歩行面に押されることによって、第2実施例の作用と同じ作用が生じる。
【0039】
足裏(靴の底面或いはロボットの足平リンクの底面)の水平を確実に確保するため、即ち、足裏の水平が中立点となることを確実にするため、水平に対する靴(或いはロボット足平リンク)の傾斜を検知する傾斜角センサを備えることも好適である。この場合、コントローラは、傾斜角センサの出力に基づいて、ポンプを駆動しソール板を傾斜させて、靴(或いはロボットの足平リンク)の底面を水平に維持する。すなわち足底機構は、足底の前後に配置された膨張収縮が可能な一対の袋体と、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化するソール板と、一対の袋体を連通する流路と、流路を開閉するバルブと、流路を通して袋体内部の流体を一対の袋体の間で移動させるポンプと、足底(靴の底面あるいはロボットの足平リンクの底面)の水平に対する傾斜角を検知する傾斜角センサを備えており、傾斜角センサの出力に基づいて、ポンプを駆動しソール板の傾斜を制御して、足底(靴の底面あるいはロボットの足平リンクの底面)を水平に維持するように構成されていることが好ましい。
【0040】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0041】
10:足底機構
12:靴
14:ソール板
16a、16b:ばね
18a、18b:荷重センサ
20:ポンプ
22:バルブ
24:流路
26a、26b:袋体
【技術分野】
【0001】
本発明は、歩行動作を支援する足底機構に関する。この足底機構は、脚式ロボットの足の一部として構成されるか、或いは、靴の底部分に構築され、脚式ロボット或いは人間の歩行動作を支援する。
【背景技術】
【0002】
歩行動作を支援する足底機構が提案されている。例えば特許文献1には、足底の前後にクッションを配置した靴が提案されている。足底の2つのクッションは流路によって連通しており、前方(後方)のクッションが収縮すると後方(前方)のクッションが膨張する。特許文献1の靴は、着地時の衝撃を和らげることができるとともに、立脚から遊脚へ遷移する際につま先に荷重が加わることで踵を持ち上げる効果がある。
【0003】
また、特許文献2には、足裏全体を柔軟な構造にして地面の細かい起伏にフィットするように構成した脚式ロボットが提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭57−177703号公報
【特許文献2】特開2005−177960号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術は、踵側に比べてつま先の荷重が強まるとつま先側のクッションが収縮するとともに踵側のクッションが膨張する。逆に、つま先に比べて踵側の荷重が強まると踵側のクッションが収縮するとともにつま先側のクッションが膨張する。すなわち、足底の荷重分布に応じてクッションが膨張収縮する。特許文献2の技術は、地面の細かい起伏に応じて足裏面が変形する。即ち、特許文献2の技術も、足底の荷重分布に応じて足裏面の形状が変化する。それらの技術は、それぞれの目的を果すことはできるが、斜面を歩行する際の特有の課題に対しては考慮されていない。斜面を歩行する際の特有の課題とは、足裏が歩行面にしっかり密着するとき(即ち、体重を支えるとき)の足首関節の角度が水平面歩行時と異なることである。即ち、斜面を歩行する際には、足裏面を斜面の角度に合わせなければならない。そのような動作は、高齢者或いは歩行が不自由な者にとっては負担となり得る。また脚式ロボットの場合、足首関節の角度を歩行面の斜度に合わせるためのアルゴリズムが必要となる。本明細書が開示す技術は、斜面歩行を支援する足底機構を提供する。
【課題を解決するための手段】
【0006】
本明細書が開示する足底機構は、歩行面の傾斜によらずに、接地した足の足底を水平に保つことができる。なお、より厳密には、本明細書が開示する足底機構は、歩行面の傾斜によらず、接地した足の足底を水平に戻すように復元力を発生させることができる。その足底機構は、足底の前後に配置された膨張収縮が可能な一対の袋体と、一対の袋体の下側に取り付けられたソール板と、一対の袋体を連通する流路と、流路を開閉するバルブを備える。ここで、「足底」とは、靴の底、或いは、ロボットの足平リンクの底面を意味する。袋体は、例えばゴムで形成された風船でよい。ソール板は、袋体の膨張収縮に応じて傾きが変化する。即ち、バルブを開くと、一対の袋体の間で内部の流体が移動でき、ソール板が傾斜する。バルブを閉じると、流体が移動することができなくなり、ソール体の傾斜が固定される。即ち、足底機構のバルブは、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合にはバルブが開いており、荷重が荷重閾値を超えた場合に前記バルブが閉じる。足が着地する際、荷重閾値を超えるまではバルブが開いており歩行面の斜度に合わせてソール板が傾斜する。荷重閾値を超えるとバルブが閉じ、足裏に対するソール板の傾斜が固定する。ここで、「固定する」とは、厳密に不動となることではなく、ソール板がさらに傾斜したときに流体が移動しない一対の袋体の復元力によって戻るべき傾斜角が決まることを意味する。即ち、バルブが閉じたときのソール板の傾斜角度が、ばね系における「中立点」に相当する。バルブが閉じた後は、体重移動による荷重変化が生じて足裏が傾斜しても、圧縮/膨張した各袋体によって、足裏面を水平に戻す方向の復元力が作用する。上記した足底機構は特に、荷重が高くなるとソール板の傾斜が固定し(中立点が設定され)、足裏の水平を保つことができる。
【0007】
上記の足底機構を採用すると、斜面を歩行する際、体重を支えるほどに荷重が増したときに、ユーザの足または脚式ロボットの足部の水平を容易に保つことができる。即ち、上記の足底機構を採用すると、階段を上り下りするように斜面を歩行することができる。
【0008】
バルブの開閉は、センサやコントローラを使って能動的に行ってもよいし、足裏に加わる荷重が閾値を超えると受動的にバルブが閉じる機構を採用してもよい。前者の場合、足底機構は荷重センサを備えるとともにソレノイドなどで動作する開閉弁をバルブに備える。そしてコントローラは、荷重センサが検知する荷重が荷重閾値を超えるとソレノイドを駆動してバルブを閉じる。荷重が荷重閾値を下回っている場合は、バルブは開放される。後者の場合は、ソール板自体が足に対して上下動するとともにバルブの開閉弁がソール板に機構的に連結しており、ソール板の上下動に連動してバルブを開閉するメカニカル機構を採用すればよい。或いは、バルブ開閉弁に連結されたロッドをソール板から下方に突出させ、ロッドが引っ込むと開閉弁がバルブを閉じるメカニズムを採用すればよい。ソール板或いはロッドはばねによって足底に支持されておりばねの弾性率によって上記の「荷重閾値」が実現される。
【0009】
上記の足底機構は、流路を通して袋体内部の流体を一対の袋体の間で移動させるポンプをさらに備えることが好ましい。ポンプによって流体を移動させ、ソール板を能動的に傾斜させることができる。すなわち、ポンプは、ソール板を傾斜させるアクチュエータに相当する。
【0010】
上述の足底機構は、前後方向の傾斜に対して(接地している足の)足裏の水平を維持することができる。前述したように、「足裏の水平を維持する」とは、足裏の水平が中立点となるようソール板を傾斜させることを意味することに留意されたい。この足底機構の技術的思想は、前後方向だけでなく、横方向の傾斜に対して足裏の水平を維持する装置に拡張することができる。なお、ここで「横方向」とは、つま先と踵を結ぶ直線と交差する方向を意味する。横方向の傾斜に適応することのできる足底機構は、一対の袋体を結ぶ直線から横方向に離れた位置で足底に配置された第3袋体と、一対の袋体の夫々と第3袋体を連通する流路と、各流路の夫々に備えられており各流路を開閉するバルブをさらに備えていればよい。各流路を開閉する夫々のバルブは、足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合には開いており、荷重が荷重閾値を超えた場合に閉じる。一直線上に並んでいない3個の袋体の膨張収縮によってソール板はピッチ軸とロール軸の2軸周りに傾斜することができる。即ち、そのような足底機構は、どのような方向に傾斜している斜面に対してもソール板を傾斜させることによって足底面の水平を保持し易くすることができる。
【図面の簡単な説明】
【0011】
【図1】第1実施例の足底機構の模式的機構図を示す。
【図2】第1実施例の足底機構の動きを説明する図である(1)。
【図3】第1実施例の足底機構の動きを説明する図である(2)。
【図4】第2実施例の足底機構の模式的機構図を示す。
【図5】第3実施例の足底機構の模式的機構図を示す。
【図6】第4実施例の足底機構の模式的平面図を示す。
【図7】第5実施例の足底機構の模式的機構図を示す。
【実施例1】
【0012】
図1に、第1実施例の足底機構10を示す。この足底機構10は、ユーザUが履く靴12の一部として構成されている。靴12の下側に、ばね16a、16bを介してソール板14が配置されている。靴12とソール板14の間に一対の袋体26a、26bが配置されている。即ち、一対の袋体26a、26bを挟んで靴12の底面とソール板14が対向している。詳しくは後述するが、一対の袋体26a、26bの一方が膨張するとともに他方が収縮することによって、ソール板14は靴12の底面に対して傾斜する。一対の袋体26a、26bは、内部に空気が充填されているゴム風船である。
【0013】
一対の袋体26a、26bは、流路24で結ばれている。流路24は、一対の袋体26a、26bの内部の流体を通す管である。流路24を介して一方の袋体から他方の袋体へ内部の流体が移動することができる。さらに流路24には、流路を開閉するバルブ22(即ち、流体通過の許容と禁止を切り換えるバルブ)が備えられている。なお、図1は、足底機構10の機構を模式的に示す図であって、足底機構10の物理的構造を厳密には表していない。例えば、袋体26a、26bの周囲は柔軟なカバーで覆われており、袋体26aと26bは外からは見えない。また、袋体26a、26bの上側は靴12の底面12aに接しており、袋体26a、26bの下側はソール板14の上面14aに接している。また、流路24とバルブ22は、靴12の内部に配置されているのではなく、例えば靴12の甲の上、或いは踵の後ろ側に配置されている。図では、機能を理解し易いように、バルブ22を靴12の中央付近に描いてある。
【0014】
ソール板14には、前方(つま先側)と後方(踵側)に夫々荷重センサ18a、18bが配置されている。荷重センサ18a、18bは、足底が歩行面Gから受ける荷重を計測する。また、図示を省略しているが、靴12はコントローラを備える。コントローラは、荷重センサ18a、18bの計測値に基づいて、バルブ22の開閉を制御する。
【0015】
ソール板14は、2つのばね16a、16bによって、靴12側に引っ張られている。ばね16a、16bによって、ソール板14が一対の袋体26a、26bに押し付けられている。そのため、一対の袋体26a、26bの膨張収縮に応じてソール板14は靴12に対して傾く。一方の袋体26aはつま先側に配置され、他方の袋体26bは踵側に配置されており、両者の内部流体(空気)は流路24を通じて一方の袋体から他方の袋体へ移動することができる。即ち、つま先側の袋体26aが収縮するとともに踵側の袋体26bが膨張すると、ソール板14は前方が靴12に近づき後方が靴12から離れるように傾斜する(図2参照)。逆に、つま先側の袋体26aが膨張するとともに踵側の袋体26bが収縮すると、ソール板14は前方が靴12から離れ後方が靴12に近づくように傾斜する(図3参照)。いずれの場合も、ソール板14は、靴12に対して相対的に、ピッチ軸回りに傾斜する。なお、「ピッチ軸」とは、ロボットの技術分野でよく知られているように、ユーザ(或いはロボット)の側方に伸びる軸を意味する。
【0016】
バルブ22の機能について説明する。コントローラ(不図示)は、前後に配置された荷重センサ18a、18bが検知する荷重の大きさによってバルブ22を制御する。コントローラは、荷重センサ18aと18bが検知する荷重の平均値が予め定められた荷重閾値を超えるまではバルブ22を開いておく。コントローラは荷重の平均値が荷重閾値を超えるとバルブ22を閉じる。荷重閾値は、予め設定されており、例えば、ユーザの体重の15%の大きさである。
【0017】
例えば、足底機構10が地面を蹴って離床する瞬間では、荷重センサ18aと18bが検知する荷重の平均値は必ず荷重閾値(例えばユーザの体重の15%)未満になる。荷重の平均値が荷重閾値を下回っている間、コントローラはバルブ22を開放する。離床時は踵側の荷重よりつま先側の荷重の方が大きい。従って、荷重の差によってつま先側の袋体26aが収縮し踵側の袋体26bが膨張する。即ち、流路24を通じて内部流体がつま先側の袋体26aから踵側の袋体26bへ移動する。
【0018】
図2に、登り坂を歩行する際のソール板14の傾斜の様子を例示し、図3に、下り坂を歩行する際のソール板14の傾斜の様子を例示する。登り坂を歩行する場合、着地時には先につま先が接地する。そのため、つま先側に加わる荷重が踵側に加わる荷重よりも大きくなる。荷重の差によってつま先側の袋体26aが収縮し踵側の袋体26bが膨張する。コントローラによってバルブ22が開放されている間、荷重が大きいつま先側の袋体26aから荷重の小さい踵側の袋体26bへ内部流体が流れる。その結果、図2に示すように、ソール板14は、つま先側が靴12に近くなり、踵側が靴12から離れるように傾斜する。
【0019】
遊脚だった足が着地し体重が加わっていくにつれて、踵側の荷重が増大する。前後2つの荷重センサの計測値の平均値がユーザの体重の15%を超えると、コントローラはポンプ20を停止する。なお、コントローラは、荷重センサの計測値の平均値がユーザの体重の15%を下回っている間は、バルブ22を開放している。
【0020】
バルブ22を閉じると、一対の袋体26a、26bの間を流体が流れることができなくなる。その結果、靴12に対するソール板14の傾斜が固定する。図2に示すように、ソール板14は歩行面Gの傾斜に合わせて傾斜するが、接地している靴12の底は水平を維持する。体重移動などにより、つま先側と踵側の荷重が変化すると、靴12が傾斜し、夫々の袋体26a、26bが圧縮或いは膨張する。ここで、バルブ22が閉じているのでそれぞれの袋体は独立に密封されており、夫々が弾性体として機能する。即ち、靴12を水平に戻す向きに復元力が発生する。この復元力によってユーザは靴21を水平に戻し易くなる。即ち、ユーザは接地した足の足底を水平に維持したまま登り坂を登ることができる。図2に示すように、ユーザは、あたかも階段を登るように登り坂を歩行することができる。
【0021】
歩行する場合、登り坂・下り坂のいずれにおいても通常は踵から着地する。しかし、登り坂を歩行する場合は平地での歩行に比べて踵が接地してからつま先が接地するまでの時間が短くなる。場合によってはつま先から接地することもある。つまり、つま先側の荷重センサ18aの計測値と踵側の荷重センサ18bの計測値が近い状態で荷重閾値を超える。そのため、登り坂の傾斜が大きいほど、踵側の袋体26bからつま先側の袋体26aへ流れる内部流体の量が少なくなる。その結果、図2に示すように、ソール板14はつま先側が靴12に近くなるとともに、踵側が靴12から離れるように傾斜した状態で固定される(バルブ22が閉じる)。なお、踵よりもつま先が先に接地する場合には、内部流体はつま先側から踵側に移動する。
【0022】
下り坂を歩行する場合の着地では、平地歩行に比べて踵が接地してからつま先が接地するまでの時間が長くなる。そのため、踵側の荷重がつま先側の荷重よりも大きくなっている時間が長くなる。踵側の袋体26bが収縮し、つま先側の袋体26aが膨張する。コントローラがバルブ22を開いている間、荷重の大きい踵側の袋体26bから荷重の小さいつま先側の袋体26aへ内部流体が流れる。その結果、図3に示すように、ソール板14は、踵側が靴12に近くなり、つま先側が靴12から離れるように傾斜する。
【0023】
2つの荷重センサ18a、18bの計測値の平均値がユーザの体重の15%を超えると、コントローラはバルブ22を閉じる。その結果、靴12に対するソール板14の傾斜が固定する。図3に示すように、ソール板14は歩行面Gの傾斜に合わせて傾斜するが、靴12の底は水平を維持する。登り坂の場合と同様に、足底機構10は靴12を水平に維持するように復元力を発生する。即ち、ユーザは接地したときの足底を水平に維持したまま下り坂を登ることができる。図2に示すように、ユーザは、あたかも階段を登るように下り坂を歩行することができる。このように足底機構10は、斜面を歩行する際、ユーザの足裏の水平を容易に維持することができる。
【実施例2】
【0024】
図4を参照して第2実施例の足底機構110を説明する。図4は、足底機構110の模式的な側面図である。第2実施例の足底機構110は、第1実施例の足底機構10に加えてポンプ20を備えている。コントローラ(不図示)は、前後の荷重センサの計測値を比較し、計測値(荷重)が大きい側に位置する袋体から計測値(荷重)が小さい側の袋体へ内部流体(空気)が流れるようにポンプ20を制御する。第1実施例の足底機構10は、つま先と踵に加わる荷重差によって内部流体が前後の袋体26の間を移動する。第2実施例の足底機構110は、ポンプ209が積極的に内部流体を移動させる。即ち、第2実施例の足底機構110は、第1実施例の足底機構10よりも積極的に、着地する際にソール板14が歩行面Gの傾斜に応じて傾斜する。
【0025】
登り坂を歩行する場合、着地時には先につま先が接地する。そのため、つま先側の荷重センサ18aの計測値が踵側の荷重センサ18bの計測値よりも大きくなる。コントローラは、計測値の大きいつま先側の袋体26aから計測値の小さい踵側の袋体26bへ内部流体が流れるようにポンプ20を駆動する。つま先側の袋体26aが収縮し、踵側の袋体26bが膨張する。その結果、ソール板14は、つま先側が靴12に近くなり、踵側が靴12から離れるように傾斜する。
【0026】
遊脚だった足が着地し体重が加わっていくにつれて、踵側の荷重センサ18bが計測する荷重も増大する。前後2つの荷重センサの計測値の平均値がユーザの体重の50%を超えると、コントローラはポンプ20を停止するとともにバルブ22を閉じる。なお、コントローラは、荷重センサの計測値の平均値がユーザの体重の15%を下回っている間は、バルブ22を開放している。
【0027】
バルブ22を閉じると、一対の袋体26a、26bの間を流体が流れることができなくなる。その結果、靴12に対するソール板14の傾斜が固定する。ソール板14は歩行面Gの傾斜に合わせて傾斜するが、接地している靴12の底は水平を維持する。体重移動などにより、つま先側と踵側の荷重が変化すると、靴12が傾斜し、夫々の袋体26a、26bが圧縮或いは膨張する。ここで、バルブ22が閉じているのでそれぞれの袋体は独立に密封されており、夫々が弾性体として機能する。即ち、靴12を水平に戻す向きに復元力が発生する。この復元力によってユーザは靴21を水平に戻し易くなる。即ち、ユーザは接地した足の足底を水平に維持したまま登り坂を登ることができる。
【0028】
下り坂を歩行する場合、着地時には先に踵が接地する。そのため、踵側の荷重センサ18bの計測値はつま先側の荷重センサ18aの計測値よりも大きくなる。コントローラは、計測値の大きい踵側の袋体26bから計測値の小さいつま先側の袋体26aへ内部流体が流れるようにポンプ20を駆動する。踵側の袋体26bが収縮し、つま先側の袋体26aが膨張する。その結果、図3に示すように、ソール板14は、踵側が靴12に近くなり、つま先側が靴12から離れるように傾斜する。
【0029】
2つの荷重センサ18a、18bの計測値の平均値がユーザの体重の15%を超えると、コントローラはポンプ20を停止するとともにバルブ22を閉じる。その結果、靴12に対するソール板14の傾斜が固定する。ソール板14は歩行面Gの傾斜に合わせて傾斜するが、靴12の底は水平を維持する。登り坂の場合と同様に、足底機構110は靴12を水平に維持するように復元力を発生する。即ち、ユーザは接地したときの足底を水平に維持したまま下り坂を登ることができる。
【実施例3】
【0030】
図5を参照して第3実施例の足底機構210を説明する。図5は、足底機構210の模式的な機構図である。ただし、図5は、バルブ222周辺の拡大図を示しており、足底機構全体を示していないことに留意されたい。図5に示されていない部分は、図3の足底機構110と同様の形態を備えている。また、図5では、バルブ222のみ、断面を示している。また、バルブ222は、靴12の内部ではなく、靴12の下方であり一対の袋体26a、26bの間に配置されている。図5は、機能の理解を助けるために、バルブ222の位置を図3に合わせて描いており、物理的配置を正確には示していないことに留意されたい。
【0031】
第3実施例の足底機構210は、動力を使わずにバルブ222を閉じることができる。即ち足底機構210は、動力を使わずにソール板214の傾きを固定することができる。なお、より厳密には、靴12が水平となるときが、袋体26a、26bの復元力による中立位置となるように、ソール板214の傾斜角が定まる。以下では簡単のため、中立点となるソール板の傾斜角が定まることを「ソール板の傾斜が固定する」と表現する場合がある。バルブ222は、ばね223で下方に付勢されている開閉弁224を備える。開閉弁224が下方に位置するとき、バルブ222は開放状態となり、開閉弁224が上方に移動するとバルブ222が閉じる。開閉弁224の下端はジョイント225を介してロッド226の上端に連結されている。ロッド226の下端はジョイント227を介してソール板214に連結されている。ジョイント225、ロッド226、及び、ジョイント227は、ソール板214の前後後方のほぼ中央に位置している。従って、ソール板214はジョイント227を中心に前後に(ピッチ軸回りに)傾くことができる。
【0032】
足底機構210を装着した足が遊脚の間は、ソール板214は歩行面から圧力を受けることがない。従ってばね223によって開閉弁224は下側に位置し、バルブ222は開いた状態となる。足底機構210を装着した足が着地する際、ソール板214が接地し、ソール板214は歩行面から圧力を受ける。ソール板214は、歩行面からの圧力によって、ばね223に抗しながらも靴12に接近する。歩行面からの圧力が予め定められた荷重閾値に達すると、ソール板214とともに開閉弁224が上方に移動し、バルブ222が閉じる。バルブ222が閉じるまでの間、流路24を通じて流体が一対の袋体26a、26bの間を移動し、歩行面の斜度に応じてソール板214が傾斜する。歩行面からの圧力が予め定められた荷重閾値に達すると、バルブ222が閉じて流体が移動できなくなり、ソール板214の傾斜が固定する。第2実施例の足底機構210は、動力(電力)を要することなく、着地すると床面からの荷重によって受動的にバルブ222が閉じ、ソール板214の傾斜が固定する。なお、第3実施例の足底機構210は、第3実施例の足底機構110が有するポンプ20を備えていない。第3実施例の足底機構210は、第1実施例の足底機構10と同様に、つま先側と踵側の接地荷重の差によって流体が一方の袋体から他方の袋体へ移動する。
【実施例4】
【0033】
図6を参照して第4実施例の足底機構310を示す。図6は、足底機構310の模式的平面図を示す。足底機構310は、一対の袋体326aと326bの他、第3の袋体326cを備える。一対の袋体326aと326bは、第2実施例の足底機構110と同様に、足の前後に配置されている。第3の袋体326cは、前方の袋体326aの横に配置されている。詳しくは、第3の袋体326cは、一対の袋体326a、326bを結ぶ直線から横方向に離れた位置に配置されている。3つの袋体326a、326b、及び、326cは夫々流路324a、324b、及び、324cによって連結されている。詳しくは、袋体326aと袋体326bが流路324bによって連結されており、袋体326bと326cが流路324cによって連結されており、袋体326cと326aが流路324aによって連結されている。流路324aには流路を開閉するバルブ322aと、袋体326aと326cの間で流体を移動させるポンプ320aが配置されている。流路324bには流路を開閉するバルブ322bと、袋体326aと326bの間で流体を移動させるポンプ320bが配置されている。流路324cには流路を開閉するバルブ322cと、袋体326bと326cの間で流体を移動させるポンプ320cが配置されている。この足底機構310は、歩行面のピッチ軸回りの傾斜のみならず、ロール軸(ユーザの前後方向に伸びる軸)周りの歩行面の傾斜に対してもソール板314を傾斜させることができる。別言すれば、足底機構310は、ピッチ軸のみならずロール軸周りの歩行面の傾斜に対してソール板314を傾斜させることができ、接地したユーザの足裏の水平を維持することができる。ソール板314を傾斜させる原理は、第2実施例の足底機構10の原理と同じである。
【実施例5】
【0034】
図7を参照して第5実施例の足底機構410を説明する。この足底機構410は、ロボット900の足裏に構築される。ロボット900は脚式ロボットであり、下腿リンク904と足平リンク902が足首ジョイント906によって連結されている。図示を省略しているが、下腿リンク904の上方は膝ジョイントを介して大腿リンクが連結されている。即ち、ロボット900は、人間の脚の構造を模した脚式ロボットである。足平リンク902に設けられた足底機構410の構造は全て第2実施例の足底機構110と同じであるので説明は省略する。なお、第1実施例の部品と同じ部品には同じ符号を付してある。
【0035】
足底機構410を備えたロボット900は、斜面を歩行する際、ソール板14が斜面に応じて傾斜するので、接地した足平902の水平を維持することができる。従って、ロボット900は斜面を歩行する際、足首ジョイント906の角度は水平面歩行時の角度と同じでよい。従って、歩行制御(歩行するための各ジョイントの制御)が容易になる。
【0036】
実施例の足底機構の変形例を説明する。荷重センサ18a、18bの代わりに、距離センサを配置してもよい。その場合、足底機構は、つま先側と踵側にソール板と歩行面との間の距離を計測する距離センサを備え、コントローラはポンプを制御し、前後の距離センサの計測値が等しくなるようにソール板を傾斜させる。そのような距離センサに基づく制御によっても、実施例の足底機構と同様に斜面の歩行を支援することができる。
【0037】
第1実施例の足底機構10において、コントローラは、2つの荷重センサ18a、18bの夫々が検出する荷重の差が大きいほどバルブの開度を大きくすることも好適である。バルブの開度が大きい程、流路24を流れる流体の流量が増加する。歩行面Gとソール板14の角度が大きいほど、2つの荷重センサ18a、18bの夫々が検出する荷重の差が大きくなる。上記のようにバルブを制御することによって、歩行面Gとソール板14の角度が大きいほど、流量が増大し、ソール板14が迅速に歩行面Gと平行になる。同じ理由により、第2実施例の足底機構110において、コントローラは、2つの荷重センサ18a、18bの夫々が検出する荷重の差が大きいほど流路24を流れる流体の流量が増大するようにポンプ20を制御することも好適である。
【0038】
第3実施例ではロッド226をソール板214に連結した。これに代えてロッド226をソール板214から下方に突出するように構成してもよい。ロッド226が歩行面に押されることによって、第2実施例の作用と同じ作用が生じる。
【0039】
足裏(靴の底面或いはロボットの足平リンクの底面)の水平を確実に確保するため、即ち、足裏の水平が中立点となることを確実にするため、水平に対する靴(或いはロボット足平リンク)の傾斜を検知する傾斜角センサを備えることも好適である。この場合、コントローラは、傾斜角センサの出力に基づいて、ポンプを駆動しソール板を傾斜させて、靴(或いはロボットの足平リンク)の底面を水平に維持する。すなわち足底機構は、足底の前後に配置された膨張収縮が可能な一対の袋体と、一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化するソール板と、一対の袋体を連通する流路と、流路を開閉するバルブと、流路を通して袋体内部の流体を一対の袋体の間で移動させるポンプと、足底(靴の底面あるいはロボットの足平リンクの底面)の水平に対する傾斜角を検知する傾斜角センサを備えており、傾斜角センサの出力に基づいて、ポンプを駆動しソール板の傾斜を制御して、足底(靴の底面あるいはロボットの足平リンクの底面)を水平に維持するように構成されていることが好ましい。
【0040】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0041】
10:足底機構
12:靴
14:ソール板
16a、16b:ばね
18a、18b:荷重センサ
20:ポンプ
22:バルブ
24:流路
26a、26b:袋体
【特許請求の範囲】
【請求項1】
歩行動作を支援する足底機構であり、
足底の前後に配置された膨張収縮が可能な一対の袋体と、
一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化するソール板と、
一対の袋体を連通する流路と、
流路を開閉するバルブと、
を備えており、
足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合にはバルブが開いており、前記荷重が荷重閾値を超えた場合に前記バルブが閉じることを特徴とする足底機構。
【請求項2】
前記流路を通して袋体内部の流体を一対の袋体の間で移動させるポンプをさらに備えることを特徴とする請求項1に記載の足底機構。
【請求項3】
一対の袋体を結ぶ直線から横方向に離れた位置で足底に配置された第3袋体と、
一対の袋体の夫々と第3袋体を連通する流路と、
各流路の夫々に備えられており各流路を開閉するバルブと、
をさらに備えることを特徴とする請求項1又は2に記載の足底機構。
【請求項1】
歩行動作を支援する足底機構であり、
足底の前後に配置された膨張収縮が可能な一対の袋体と、
一対の袋体の下側に取り付けられており、袋体の膨張収縮に応じて傾きが変化するソール板と、
一対の袋体を連通する流路と、
流路を開閉するバルブと、
を備えており、
足底が地面から受ける荷重が予め定められた荷重閾値を下回っている場合にはバルブが開いており、前記荷重が荷重閾値を超えた場合に前記バルブが閉じることを特徴とする足底機構。
【請求項2】
前記流路を通して袋体内部の流体を一対の袋体の間で移動させるポンプをさらに備えることを特徴とする請求項1に記載の足底機構。
【請求項3】
一対の袋体を結ぶ直線から横方向に離れた位置で足底に配置された第3袋体と、
一対の袋体の夫々と第3袋体を連通する流路と、
各流路の夫々に備えられており各流路を開閉するバルブと、
をさらに備えることを特徴とする請求項1又は2に記載の足底機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−16447(P2012−16447A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−154938(P2010−154938)
【出願日】平成22年7月7日(2010.7.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]