
車両用ステアリング緩衝装置
【課題】直立走行時にはステアリングの取り回しを容易にし、コーナリング時には過度なステアリング操作が行われて転倒事故が発生するのを抑制することができる車両用ステアリング緩衝装置を提供する。
【解決手段】車体傾斜角検出器31と、操舵角検出器32と、検出された車体の傾斜角と操舵角との双方に対してステアリングダンパ1の動作特性を制御する制御部とを設けて、検出された車体の各傾斜角に対して操舵角がニュートラルステア領域にあるときに操舵部材9,9に働く制動力を弱くし、車体の各傾斜角に対して操舵角がニュートラルステア領域から外れているときには、操舵角がニュートラルステア領域から外れている度合が大きい場合ほど操舵部材9,9に働く制動力を強くするようにステアリングダンパ1の動作特性を制御するようにした。
【解決手段】車体傾斜角検出器31と、操舵角検出器32と、検出された車体の傾斜角と操舵角との双方に対してステアリングダンパ1の動作特性を制御する制御部とを設けて、検出された車体の各傾斜角に対して操舵角がニュートラルステア領域にあるときに操舵部材9,9に働く制動力を弱くし、車体の各傾斜角に対して操舵角がニュートラルステア領域から外れているときには、操舵角がニュートラルステア領域から外れている度合が大きい場合ほど操舵部材9,9に働く制動力を強くするようにステアリングダンパ1の動作特性を制御するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動二輪車等の車両に設けるステアリング緩衝装置に関するものである。
【背景技術】
【0002】
自動二輪車において、路面からステアリングに伝達される衝撃を緩和するために用いるステアリング緩衝装置として、特許文献1に示されたものが知られている。この緩衝装置は、作動油が収容されたシリンダと該シリンダ内で該シリンダの軸線方向に変位自在に設けられて変位に伴って作動油を流動させるピストンとを有して、車両の操舵部材の変位に応動してピストンを変位させることにより操舵部材の変位を抑制するための制動力(減衰力)を生じるように設けられたステアリングダンパと、ステアリングダンパの動作特性を車両の走行速度と、操舵角の変化速度とに対して制御する制御部とを備えている。この種のステアリングダンパは、ピストンの変位速度の増大に伴って、操舵部材に働く制動力が増大するような動作特性を有している。特許文献1に示された緩衝装置においては、車両が低速及び中速で走行しているときには操舵角が急激に変化した場合(急ハンドルが切られた場合)にのみ大きな制動力を発生させ、車両が高速で走行しているとき及び加速状態にあるときには常に大きい制動力を発生させるように、ステアリングダンパの動作特性を制御している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−12530号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に示されたステアリング緩衝装置においては、車速と操舵角の変化率とに対してステアリングダンパの制動特性を制御しているが、車体の傾斜角は考慮していない。自動二輪車においては、低速走行状態で車体を傾斜させながらコーナーを走行している際に、ハンドルをイン側に深く切りすぎると、スリップして転倒するおそれがあるが、特許文献1に示された緩衝装置では、車体の傾斜角を制御条件としていないため、このような走行状態での安全性を確保するための制御を行うことができない。
【0005】
本発明の目的は、直立走行時のハンドルの操作性を損なうことなく、コーナリング時に転倒事故が発生するのを抑制することができるようにした車両用ステアリング緩衝装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、作動油が収容されたシリンダと該シリンダ内で該シリンダの軸線方向に変位自在に設けられて変位に伴って作動油を流動させるピストンとを備えて、シリンダ及びピストンの一方及び他方がそれぞれ車両の車体のフレーム及び操舵部材に連結されたステアリングダンパと、ピストンの変位速度と作動油からピストンに与えられる制動力の大きさとの間の関係を与えるステアリングダンパの動作特性を制御する制御部とを備えて、車体のフレームと操舵部材との間に生じる相対的な変位に応じてピストンを変位させることにより操舵部材とフレームとの間の変位を抑制する制動力を発生させる車両用ステアリング緩衝装置を対象とする。
【0007】
本発明においては、電気的な制御信号の大きさに応じてステアリングダンパの動作特性を調節する動作特性調節部と、車体の傾斜角を検出する車体傾斜角検出器と、操舵部材の操舵角を検出する操舵角検出器とを備え、制御部は、操舵角検出器により検出された操舵角が車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときにピストンに働く制動力を弱くし、検出された操舵角が設定領域から外れて大きくなっているときには該操舵角が前記設定領域から外れている度合が大きい場合ほどピストンに働く制動力を強くするように、車体傾斜角検出器により検出された傾斜角と、操舵角検出器により検出された操舵角との双方に対して制御信号の大きさを決定する。
【0008】
上記のように構成すると、車体の各傾斜角に対して設定する操舵角の設定領域を適正に設定しておくことにより、車体を傾斜させてコーナリング走行をしている状態で、運転者が操舵部材をイン側に変化させる操作を行なおうとしたときに、操舵部材に働く制動力を増大させて、運転者が操舵部材をイン側に操作するのを抑制することができるため、操舵部材をイン側に切りすぎて、転倒事故が発生する危険性を減らすことができる。
【0009】
車体を直立させて直立走行を行っているときには、操舵角は設定領域にあるので、直立走行時に操舵部材に働く制動力を弱くすることができる。従って、直立走行時に操舵部材に作用する制動力が強くなって操舵部材の操作性が損なわれることはない。
【0010】
本発明の好ましい態様で用いるステアリングダンパは、ピストンにより仕切られる主流路と、ピストンの前後の主流路を相互に連通させるバイパス流路とをシリンダ内に有していて、ピストンの変位に伴ってピストンの変位方向の前方の主流路内からバイパス流路を通してピストンの後方の主流路に流れる作動油の流れを生じさせることにより、制動力を発生させるように構成されている。この場合、ステアリングダンパの動作特性を調節する動作特性調節部は、シリンダの側壁部を貫通してバイパス流路内に進退し得るように設けられて、バイパス流路内への進入量に応じてバイパス流路内を流れる作動油の単位時間当たりの流量を調節する弁体と、制御信号に応じて弁体を駆動して弁体の進入量を変化させる電気式アクチュエータとにより構成することができる。
【0011】
上記のようにステアリングダンパ及び動作特性調節部を構成する場合、制御部は、操舵角検出器により検出された操舵角が、車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときに弁体のバイパス流路内への進入量を少なくし、検出された操舵角が設定領域から外れて大きくなっているときには該操舵角が設定領域から外れている度合が大きい場合ほど弁体のバイパス流路内への進入量を多くするように、車体傾斜角検出器により検出された傾斜角と、操舵角検出器により検出された操舵角との双方に対して制御信号の大きさを決定する。
【0012】
上記設定領域は、検出された傾斜角における操舵角のニュートラルステア領域に等しくなるように設定するのが好ましい。
【発明の効果】
【0013】
本発明によれば、車体傾斜角検出器により検出された各傾斜角に対して操舵角検出器により検出された操舵角が、車体傾斜角検出器により検出された各傾斜角に対して設定された設定領域にあるときにピストンに働く制動力を弱くし、検出された操舵角が上記設定領域から外れて大きくなっているときには該操舵角が該設定領域から外れている度合が大きい場合ほどピストンに働く制動力を強くするように、車体の傾斜角と操舵角との双方に対して、ステアリングダンパの動作特性を制御するようにしたので、車体を傾斜させてコーナリング走行をしている状態で、運転者が操舵部材をイン側に変化させる操作を行なおうとしたときに、操舵部材に働く制動力を増大させて、運転者が操舵部材をイン側に操作するのを抑制することができ、コーナリング時に操舵部材をイン側に切りすぎて、転倒事故が発生する危険性を減らすことができる。また車体を直立させた状態で走行しているときには操舵部材に働く制動力を弱くすることができるため、直立走行時の操舵部材の取り回しを容易にすることができる。従って本発明によれば、直立走行時の操舵部材の操作性を何ら損なうことなく、コーナリング時の転倒の危険性を減らして、安全性を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係わる緩衝装置の構成を概略的に示した構成図である。
【図2】本発明の実施形態においてステアリングダンパの調節部に与える制御信号の大きさを決定する演算を行なう際に用いるマップの構造を説明するためのグラフである。
【図3】ステアリングダンパの動作特性の一例を示したグラフである。
【図4】本発明の実施形態において制御部を構成するECUのCPUに実行させるタスク処理のアルゴリズムの一例を示すフローチャートである。
【発明を実施するための形態】
【0015】
以下図面を参照して本発明を自動二輪車に適用する場合の一実施形態を詳細に説明する。
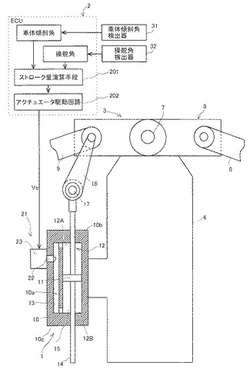
図1は、本発明の一実施形態に係わる緩衝装置の構成を概略的に示した構成図で、同図において、1はステアリングダンパ、2はステアリングダンパの動作特性を制御する制御部を構成する電子式制御装置(ECU)、3は自動二輪車の車体である。
【0016】
車体3は、フレーム4と、フレーム4に回転自在に支持された操舵軸7と、操舵軸7の上端に固定されたトップブリッジ8と、トップブリッジ8を介して連結された左右の操舵部材(操作ハンドル)9,9とを備えている。図示してないが、操舵軸7は、前輪を支持したフロントフォークにトップブリッジ8及びボトムブリッジ(図示せず。)を介して連結されている。車体3は更に後輪や、後輪を駆動する原動機等を備えているがこれらの図示は省略されている。
【0017】
ステアリングダンパ1は、シリンダ10と、シリンダ10内に設けられた円筒状のピストン収容室10a内に嵌合されてシリンダ内でシリンダの軸線方向に変位するピストン11とを有し、シリンダ収容室10aが作動油の主流路12を形成している。主流路12は、ピストン11により第1の主流路12Aと、第2の主流路12Bとに仕切られている。
【0018】
シリンダ10内にはまた、主流路12の側方をシリンダの軸線方向に伸びるバイパス流路13が形成され、このバイパス流路により第1の主流路12Aと第2の主流路12Bとが連通させられている。ピストン11には、シリンダ10の軸線方向に伸びるピストンロッド14が取り付けられている。ピストンロッド14の一端はシリンダ10の軸線方向の一端側の端部壁10bをスライド自在に貫通して外部に導出され、ピストンロッド14の他端は、シリンダ10の軸線方向の他端側の端部壁10cをスライド自在に貫通して外部に導出されている。主流路12内及びバイパス流路13内には作動油15が収容されている。
【0019】
ピストンロッド14の一端は、トップブリッジ8に一端が枢支されたレバー16の他端にピン17を介して連結されている。ステアリングダンパ1は、シリンダ10を自動二輪車の車体のフレーム4に固定し、ピストンロッド14をレバー16を介してトップブリッジ8に連結した状態で、操舵部材9,9とフレーム4との間に取り付けられている。
【0020】
従って、操舵部材9,9が操作されて操舵軸7を中心に回動させられると、ピストン11がシリンダ10の軸線方向に変位させられる。図示の例では、操舵部材9、9が図面上時計方向に変位させられたとき(ハンドルが右に切られたとき)にピストン11が図において上方向に変位して第1の主流路12A内の作動油15をバイパス流路13内を通して第2の主流路12B側に流す。また、操舵部材9、9が図面上反時計方向に変位させられたとき(ハンドルが左に切られたとき)には、ピストン11が図において下方向に変位して第2の主流路12B内の作動油15をバイパス流路13内を通して第1の主流路12A側に流す。これらの作動油の流れに伴ってピストンに制動力が作用する。
【0021】
ピストン11がゆっくりと変位しているときには、作動油15がピストン11の変位にほぼ追従して流れることができるため、ピストンに働く制動力は弱いが、ピストン11の変位速度が上昇しようとすると、作動油がピストンの変位に追従して流れることができなくなるため、ピストン11に作用する制動力が強くなり、ピストンの変位が抑えられる。従って、ピストン11に働く制動力は、ピストン11の変位速度にほぼ比例して増大していく。
【0022】
ピストン11に作用する制動力は、車体のフレーム4及び操舵部材9,9に伝達されるため、車体のフレーム4と操舵部材9,9との間に生じる相対的な変位に制動がかけられる。これにより、路面から車体のフレーム4及び操舵軸7を通して操舵部材9,9に伝達される力が減衰させられて、路面から伝達される力によって操舵部材に振れが生じるのが防止されるとともに、運転者から操舵部材9,9に与えられる操作力に抗する適度な抵抗力が生じさせられて、操舵部材の操作感が適度に調整される。
【0023】
ステアリングダンパ1が生じる制動力(減衰力)とピストンの変位速度との間の関係を与えるステアリングダンパの動作特性は、単位時間当たりにバイパス流路13内を流れる作動油の流量を調整することにより適宜に調整することができる。ステアリングダンパ1の動作特性を調整するため、本実施形態においては、電気的な制御信号Vsの大きさに応じてステアリングダンパの動作特性を調節する動作特性調節部21が設けられている。図示の動作特性調節部21は、シリンダ10の側壁部をスライド自在に貫通してバイパス流路13内に進退し得るように設けられて、バイパス流路13内への進入量に応じてバイパス流路内を流れる作動油の単位時間当たりの流量を調節する弁体22と、制御信号Vsに応じて弁体を駆動して弁体22のバイパス流路内へ進入量を変化させる電気式アクチュエータ23とからなっている。弁体22としては例えばニードル状ないしは棒状のものを用いることができ、電気式アクチュエータ23としては、電磁石を駆動源として用いたソレノイドアクチュエータや、リニアモータを駆動源として弁体を変位させるようにしたもの、或いはモータの回転を減速するとともに直線変位に変換して弁体22に伝達するようにしたもの等を用いることができる。弁体22は、バイパス流路13から後退する側に(バイパス流量を最大にする側に)図示しない復帰バネにより付勢されている。
【0024】
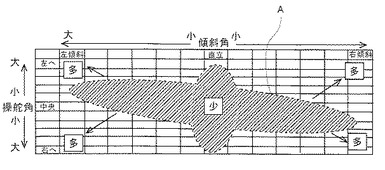
図1に示されたステアリングダンパにおいては、弁体22のバイパス流路13内への進入量を変化させることにより、図3に示すようにステアリングダンパの動作特性を変化させることができる。図3の横軸はピストン11の変位速度(単位時間当たりの変位量)を示しており、縦軸はピストンに働く制動力を示している。またS0 ないしS4 (S0 <S1 <S2 <S3 <S4 )は、弁体22のバイパス流路側への変位量(ストローク)を示している。弁体22のストローク量を大きくしていく(バイパス流路内を流れる作動油の単位時間当たりの流量を少なくしていく)ことにより、ピストンの変位速度の単位増加量当たりの制動力の増加量を多くしていくことができる。
【0025】
本発明においては、車体の傾斜角と操舵角との双方に対してステアリングダンパの動作特性を調整するための制御を行わせる。そのため、本実施形態においては、自動二輪車の車体の傾斜角を検出する車体傾斜角検出器31と、操舵部材9の操舵角を検出する操舵角検出器32とが設けられている。
【0026】
車体傾斜角検出器31は、自動二輪車の後輪(駆動輪)の回転軸の中心軸線と直交する平面が鉛直面に対してなす角度を車体の傾斜角として検出する検出器である。この車体傾斜角検出器としては、例えば、1軸型または2軸型の加速度センサを利用して傾斜角を検出する公知のものを用いることができる。
【0027】
操舵角検出器32は、操舵部材9のニュートラル位置に対する操作角度を操舵角として検出する検出器で、この操舵角検出器としては、ポテンショメータ、レゾルバ、或いは磁気エンコーダと磁気センサを組み合わせた非接触式の角度センサ等を用いることができる。
【0028】
車体傾斜角検出器31及び操舵角検出器32により検出された車体傾斜角及び操舵角は、中央演算処理装置CPU、ROMやEEPROMなどの不揮発性メモリ、一次記憶メモリRAM及び各種のインターフェースなどを有するマイクロプロセッサを備えた電子式制御装置(ECU)2に入力されている。ECU2は、車体傾斜角と操舵角とに対してステアリングダンパ1の動作特性を制御する制御部を構成する。この制御部は、操舵角検出器32により検出された操舵角が車体傾斜角検出器31により検出されている傾斜角に対して設定された設定領域にあるときにピストンに働く制動力を弱くし、検出された操舵角が上記設定領域から外れて大きくなっているときには該操舵角が設定領域から外れている度合が大きい場合ほどピストン11に働く制動力を強くするように、車体傾斜角検出器31により検出された傾斜角と、操舵角検出器32により検出された操舵角との双方に対して制御信号の大きさを決定する。
【0029】
車体の各傾斜角に対して設定する操舵角の設定領域は、通常は、ニュートラルステア領域に設定すればよいが、安全をみて、ニュートラルステア領域よりも狭めに設定してもよい。ただし、コーナリング走行以外の走行状態での操舵性が損なわれるのを防止するため、直立走行に近い状態(コーナリング走行以外の走行状態)で走行しているときに生じ得る操舵角の変動範囲よりは広く設定しておく。以下の説明では、車体の各傾斜角に対して設定する操舵角の設定領域がニュートラルステア領域であるとする。なお操舵角のニュートラルステア領域とは、二輪車をバンク(傾斜)させてコーナリングする際に、その走行状態に対して干渉しない自然な操舵角の範囲を意味する。操舵部材をニュートラルステア領域を越えて内側に操作するとオーバステアとなって二輪車は内側に切れ込んでいき、逆に操舵部材をニュートラルステア領域を越えて外側に操作するとアンダーステアとなって二輪車は外側に大回りしていく。
【0030】
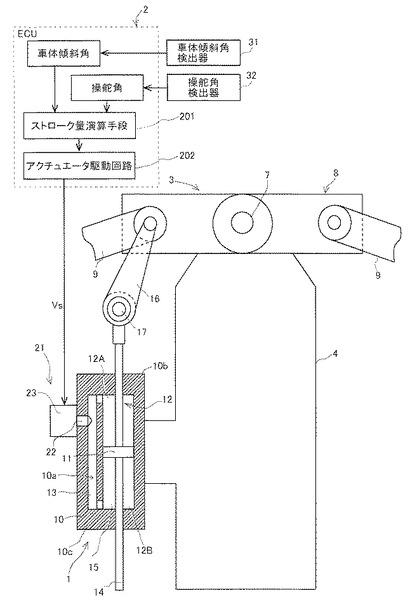
ECU2は、マイクロプロセッサに所定のプログラムを実行させることにより、車体の傾斜角と操舵角とに対して、所望の動作特性を得るための弁体22のストローク量を演算するストローク量演算手段201を構成する。ストローク量演算手段201は、車体傾斜角と操舵角と弁体22のストローク量(バイパス流路側への変位量)との間の関係を与える3次元マップを用いて、車体傾斜角と操舵角とに対して、弁体22の適正なストローク量を演算する。ECU2にはまたアクチュエータ駆動回路202が設けれていて、アクチュエータ駆動回路202からアクチュエータ23に(動作特性調節部21に)、演算されたストローク量だけ弁体22を変位させるために必要な大きさの制御信号Vsが与えられるようになっている。
【0031】
本実施形態において、弁体22のストローク量を演算する際に用いる3次元マップは、車体傾斜角検出器により検出された各傾斜角に対して操舵角検出器により検出された操舵角がニュートラルステア領域(設定領域)にあるときに弁体22のバイパス流路13内への進入量(ストローク量)を少なくし、検出された各傾斜角に対して検出された操舵角がニュートラルステア領域から外れているときには該操舵角がニュートラルステア領域から外れている度合が大きい場合ほど弁体22のバイパス流路13内への進入量を多くするように作成される。
【0032】
図2は、上記3次元マップの構造の一例を示したもので、同図の横軸は車体の傾斜角を示しており、縦軸は操舵角を示している。図2に波線で示した曲線Aの内側の斜線で示された領域が、操舵角のニュートラルステア領域であり、図中「少」は、弁体のストローク量を少なくする(ストローク量をゼロとする場合を含む。)ことを意味し、「多」は、弁体のストローク量を多くすることを意味している。操舵角がニュートラルステア領域にあるときの弁体のストローク量は一定でもよく、操舵角及び(または)車体の傾斜角に応じて多少変化させてもよいが、コーナリング走行以外の走行状態での操舵性を損なわないように(操舵部材に働く制動力が大きくなりすぎないように)するために、大きすぎないように設定しておく。
【0033】
操舵角のニュートラルステア領域は、車体の傾斜角に応じて変化する。運転者はコーナに進入するときに、車速に応じて車体を傾斜させる。車速を遅くしてコーナを抜けるときには、車体の傾斜角を小さくしてコーナに進入し、車速を速くしてコーナを抜けるときには、車体の傾斜角を大きくしてコーナに進入するため、コーナリング時の車体の傾斜角には、車両の走行速度が反映されている。従って、車速を検出することなく、操舵角が車体の各傾斜角に対して設定された設定領域にあるか否かにより、ステアリングダンパの動作特性を変える制御を行なうことにより、コーナリング走行時に運転者が操舵部材を切りすぎるのを抑制する制御を的確に行なわせることができる。
【0034】
制御部は、上記の3次元マップを用いて弁体のストローク量を演算して、弁体のストローク量を演算されたストローク量とするように、制御信号Vsを動作特性調節部21に与えることにより、車体の各傾斜角において操舵角がニュートラルステア領域内にあるときに弁体22のストローク量を少なくし、操舵角がニュートラルステア領域から外れているときに、操舵角がニュートラルステア領域から外れている度合が大きい場合ほど弁体22のストローク量を多くするように、車体の傾斜角と操舵角との双方に対してストローク量を制御して、ステアリングダンパ1の動作特性を調整する。
【0035】
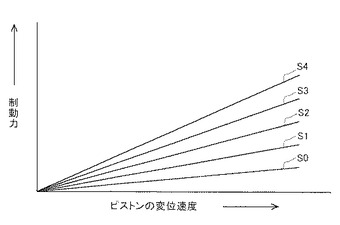
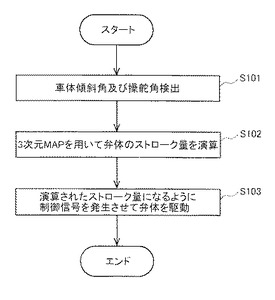
図4は、ECU2のマイクロプロセッサが、ストローク量演算手段201を構成するために、一定の時間間隔で実行するタスク処理のアルゴリズムを示している。このタスク処理が開始されると、先ずステップS101で車体の傾斜角及び操舵角が読み込まれ、ステップS102で、不揮発性メモリに記憶された前述の3次元マップを用いて、車体の傾斜角及び操舵角に対して弁体のストローク量を演算する。次いでステップS103で弁体のストローク量を演算されたストローク量とするためにアクチュエータ22に与える制御信号Vsの大きさを求め、該制御信号Vsをアクチュエータ駆動回路202から出力させてこの処理を終了する。
【0036】
上記のように、操舵角がニュートラルステア領域から外れているときに操舵角がニュートラルステア領域から外れている度合が大きい場合ほどピストンに働く制動力を強くするように、車体の傾斜角と操舵角との双方に対して、ステアリングダンパの動作特性を制御するようにすると、車体を傾斜させてコーナリング走行をしている状態で、運転者が操舵部材をイン側に変化させる操作を行なおうとしたときに、操舵部材に働く制動力を増大させて、運転者が操舵部材をイン側に操作するのを抑制することができるため、操舵部材をイン側に切りすぎて、転倒事故が発生する危険性を減らすことができる。また車体を直立させた状態で走行しているときには操舵部材に働く制動力を弱くすることができるため、直立走行時の操舵部材の取り回しを容易にすることができる。
【0037】
ステアリングダンパ1は、操舵部材と車体フレームとの間に生じる変位に応動してピストン11に変位が生じるように、操舵部材と車体のフレームとの間に設けられればよく、ステアリングダンパ1を車体に取り付ける構造は上記の例に限定されない。
【0038】
上記の説明では、自動二輪車を例にとったが、コーナリング時に車体を傾斜させて走行することがある他の車両にも、本発明に係わるステアリング緩衝装置を適用することができる。
【0039】
上記の説明では、ECU2により、ステアリングダンパを制御する制御部のみを構成しているが、車両の駆動輪を駆動する原動機(例えばエンジン)や、原動機により駆動される発電機等の他の制御対象を制御するために車両に搭載されるECUを利用してステアリングダンパを制御する制御部を構成することができるのはもちろんである。
【符号の説明】
【0040】
1 ステアリングダンパ
2 ECU
3 車体
4 車体のフレーム
7 操舵軸
8 トップブリッジ
9 操舵部材
10 シリンダ
10a ピストン収容室
11 ピストン
12 主流路
12A 第1の主流路
12B 第2の主流路
13 バイパス流路
14 ピストンロッド
15 作動油
21 動作特性調節部
22 弁体
23 アクチュエータ
31 車体傾斜角検出器
32 操舵角検出器
201 ストローク演算手段
202 アクチュエータ駆動回路
【技術分野】
【0001】
本発明は、自動二輪車等の車両に設けるステアリング緩衝装置に関するものである。
【背景技術】
【0002】
自動二輪車において、路面からステアリングに伝達される衝撃を緩和するために用いるステアリング緩衝装置として、特許文献1に示されたものが知られている。この緩衝装置は、作動油が収容されたシリンダと該シリンダ内で該シリンダの軸線方向に変位自在に設けられて変位に伴って作動油を流動させるピストンとを有して、車両の操舵部材の変位に応動してピストンを変位させることにより操舵部材の変位を抑制するための制動力(減衰力)を生じるように設けられたステアリングダンパと、ステアリングダンパの動作特性を車両の走行速度と、操舵角の変化速度とに対して制御する制御部とを備えている。この種のステアリングダンパは、ピストンの変位速度の増大に伴って、操舵部材に働く制動力が増大するような動作特性を有している。特許文献1に示された緩衝装置においては、車両が低速及び中速で走行しているときには操舵角が急激に変化した場合(急ハンドルが切られた場合)にのみ大きな制動力を発生させ、車両が高速で走行しているとき及び加速状態にあるときには常に大きい制動力を発生させるように、ステアリングダンパの動作特性を制御している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−12530号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に示されたステアリング緩衝装置においては、車速と操舵角の変化率とに対してステアリングダンパの制動特性を制御しているが、車体の傾斜角は考慮していない。自動二輪車においては、低速走行状態で車体を傾斜させながらコーナーを走行している際に、ハンドルをイン側に深く切りすぎると、スリップして転倒するおそれがあるが、特許文献1に示された緩衝装置では、車体の傾斜角を制御条件としていないため、このような走行状態での安全性を確保するための制御を行うことができない。
【0005】
本発明の目的は、直立走行時のハンドルの操作性を損なうことなく、コーナリング時に転倒事故が発生するのを抑制することができるようにした車両用ステアリング緩衝装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、作動油が収容されたシリンダと該シリンダ内で該シリンダの軸線方向に変位自在に設けられて変位に伴って作動油を流動させるピストンとを備えて、シリンダ及びピストンの一方及び他方がそれぞれ車両の車体のフレーム及び操舵部材に連結されたステアリングダンパと、ピストンの変位速度と作動油からピストンに与えられる制動力の大きさとの間の関係を与えるステアリングダンパの動作特性を制御する制御部とを備えて、車体のフレームと操舵部材との間に生じる相対的な変位に応じてピストンを変位させることにより操舵部材とフレームとの間の変位を抑制する制動力を発生させる車両用ステアリング緩衝装置を対象とする。
【0007】
本発明においては、電気的な制御信号の大きさに応じてステアリングダンパの動作特性を調節する動作特性調節部と、車体の傾斜角を検出する車体傾斜角検出器と、操舵部材の操舵角を検出する操舵角検出器とを備え、制御部は、操舵角検出器により検出された操舵角が車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときにピストンに働く制動力を弱くし、検出された操舵角が設定領域から外れて大きくなっているときには該操舵角が前記設定領域から外れている度合が大きい場合ほどピストンに働く制動力を強くするように、車体傾斜角検出器により検出された傾斜角と、操舵角検出器により検出された操舵角との双方に対して制御信号の大きさを決定する。
【0008】
上記のように構成すると、車体の各傾斜角に対して設定する操舵角の設定領域を適正に設定しておくことにより、車体を傾斜させてコーナリング走行をしている状態で、運転者が操舵部材をイン側に変化させる操作を行なおうとしたときに、操舵部材に働く制動力を増大させて、運転者が操舵部材をイン側に操作するのを抑制することができるため、操舵部材をイン側に切りすぎて、転倒事故が発生する危険性を減らすことができる。
【0009】
車体を直立させて直立走行を行っているときには、操舵角は設定領域にあるので、直立走行時に操舵部材に働く制動力を弱くすることができる。従って、直立走行時に操舵部材に作用する制動力が強くなって操舵部材の操作性が損なわれることはない。
【0010】
本発明の好ましい態様で用いるステアリングダンパは、ピストンにより仕切られる主流路と、ピストンの前後の主流路を相互に連通させるバイパス流路とをシリンダ内に有していて、ピストンの変位に伴ってピストンの変位方向の前方の主流路内からバイパス流路を通してピストンの後方の主流路に流れる作動油の流れを生じさせることにより、制動力を発生させるように構成されている。この場合、ステアリングダンパの動作特性を調節する動作特性調節部は、シリンダの側壁部を貫通してバイパス流路内に進退し得るように設けられて、バイパス流路内への進入量に応じてバイパス流路内を流れる作動油の単位時間当たりの流量を調節する弁体と、制御信号に応じて弁体を駆動して弁体の進入量を変化させる電気式アクチュエータとにより構成することができる。
【0011】
上記のようにステアリングダンパ及び動作特性調節部を構成する場合、制御部は、操舵角検出器により検出された操舵角が、車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときに弁体のバイパス流路内への進入量を少なくし、検出された操舵角が設定領域から外れて大きくなっているときには該操舵角が設定領域から外れている度合が大きい場合ほど弁体のバイパス流路内への進入量を多くするように、車体傾斜角検出器により検出された傾斜角と、操舵角検出器により検出された操舵角との双方に対して制御信号の大きさを決定する。
【0012】
上記設定領域は、検出された傾斜角における操舵角のニュートラルステア領域に等しくなるように設定するのが好ましい。
【発明の効果】
【0013】
本発明によれば、車体傾斜角検出器により検出された各傾斜角に対して操舵角検出器により検出された操舵角が、車体傾斜角検出器により検出された各傾斜角に対して設定された設定領域にあるときにピストンに働く制動力を弱くし、検出された操舵角が上記設定領域から外れて大きくなっているときには該操舵角が該設定領域から外れている度合が大きい場合ほどピストンに働く制動力を強くするように、車体の傾斜角と操舵角との双方に対して、ステアリングダンパの動作特性を制御するようにしたので、車体を傾斜させてコーナリング走行をしている状態で、運転者が操舵部材をイン側に変化させる操作を行なおうとしたときに、操舵部材に働く制動力を増大させて、運転者が操舵部材をイン側に操作するのを抑制することができ、コーナリング時に操舵部材をイン側に切りすぎて、転倒事故が発生する危険性を減らすことができる。また車体を直立させた状態で走行しているときには操舵部材に働く制動力を弱くすることができるため、直立走行時の操舵部材の取り回しを容易にすることができる。従って本発明によれば、直立走行時の操舵部材の操作性を何ら損なうことなく、コーナリング時の転倒の危険性を減らして、安全性を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係わる緩衝装置の構成を概略的に示した構成図である。
【図2】本発明の実施形態においてステアリングダンパの調節部に与える制御信号の大きさを決定する演算を行なう際に用いるマップの構造を説明するためのグラフである。
【図3】ステアリングダンパの動作特性の一例を示したグラフである。
【図4】本発明の実施形態において制御部を構成するECUのCPUに実行させるタスク処理のアルゴリズムの一例を示すフローチャートである。
【発明を実施するための形態】
【0015】
以下図面を参照して本発明を自動二輪車に適用する場合の一実施形態を詳細に説明する。
図1は、本発明の一実施形態に係わる緩衝装置の構成を概略的に示した構成図で、同図において、1はステアリングダンパ、2はステアリングダンパの動作特性を制御する制御部を構成する電子式制御装置(ECU)、3は自動二輪車の車体である。
【0016】
車体3は、フレーム4と、フレーム4に回転自在に支持された操舵軸7と、操舵軸7の上端に固定されたトップブリッジ8と、トップブリッジ8を介して連結された左右の操舵部材(操作ハンドル)9,9とを備えている。図示してないが、操舵軸7は、前輪を支持したフロントフォークにトップブリッジ8及びボトムブリッジ(図示せず。)を介して連結されている。車体3は更に後輪や、後輪を駆動する原動機等を備えているがこれらの図示は省略されている。
【0017】
ステアリングダンパ1は、シリンダ10と、シリンダ10内に設けられた円筒状のピストン収容室10a内に嵌合されてシリンダ内でシリンダの軸線方向に変位するピストン11とを有し、シリンダ収容室10aが作動油の主流路12を形成している。主流路12は、ピストン11により第1の主流路12Aと、第2の主流路12Bとに仕切られている。
【0018】
シリンダ10内にはまた、主流路12の側方をシリンダの軸線方向に伸びるバイパス流路13が形成され、このバイパス流路により第1の主流路12Aと第2の主流路12Bとが連通させられている。ピストン11には、シリンダ10の軸線方向に伸びるピストンロッド14が取り付けられている。ピストンロッド14の一端はシリンダ10の軸線方向の一端側の端部壁10bをスライド自在に貫通して外部に導出され、ピストンロッド14の他端は、シリンダ10の軸線方向の他端側の端部壁10cをスライド自在に貫通して外部に導出されている。主流路12内及びバイパス流路13内には作動油15が収容されている。
【0019】
ピストンロッド14の一端は、トップブリッジ8に一端が枢支されたレバー16の他端にピン17を介して連結されている。ステアリングダンパ1は、シリンダ10を自動二輪車の車体のフレーム4に固定し、ピストンロッド14をレバー16を介してトップブリッジ8に連結した状態で、操舵部材9,9とフレーム4との間に取り付けられている。
【0020】
従って、操舵部材9,9が操作されて操舵軸7を中心に回動させられると、ピストン11がシリンダ10の軸線方向に変位させられる。図示の例では、操舵部材9、9が図面上時計方向に変位させられたとき(ハンドルが右に切られたとき)にピストン11が図において上方向に変位して第1の主流路12A内の作動油15をバイパス流路13内を通して第2の主流路12B側に流す。また、操舵部材9、9が図面上反時計方向に変位させられたとき(ハンドルが左に切られたとき)には、ピストン11が図において下方向に変位して第2の主流路12B内の作動油15をバイパス流路13内を通して第1の主流路12A側に流す。これらの作動油の流れに伴ってピストンに制動力が作用する。
【0021】
ピストン11がゆっくりと変位しているときには、作動油15がピストン11の変位にほぼ追従して流れることができるため、ピストンに働く制動力は弱いが、ピストン11の変位速度が上昇しようとすると、作動油がピストンの変位に追従して流れることができなくなるため、ピストン11に作用する制動力が強くなり、ピストンの変位が抑えられる。従って、ピストン11に働く制動力は、ピストン11の変位速度にほぼ比例して増大していく。
【0022】
ピストン11に作用する制動力は、車体のフレーム4及び操舵部材9,9に伝達されるため、車体のフレーム4と操舵部材9,9との間に生じる相対的な変位に制動がかけられる。これにより、路面から車体のフレーム4及び操舵軸7を通して操舵部材9,9に伝達される力が減衰させられて、路面から伝達される力によって操舵部材に振れが生じるのが防止されるとともに、運転者から操舵部材9,9に与えられる操作力に抗する適度な抵抗力が生じさせられて、操舵部材の操作感が適度に調整される。
【0023】
ステアリングダンパ1が生じる制動力(減衰力)とピストンの変位速度との間の関係を与えるステアリングダンパの動作特性は、単位時間当たりにバイパス流路13内を流れる作動油の流量を調整することにより適宜に調整することができる。ステアリングダンパ1の動作特性を調整するため、本実施形態においては、電気的な制御信号Vsの大きさに応じてステアリングダンパの動作特性を調節する動作特性調節部21が設けられている。図示の動作特性調節部21は、シリンダ10の側壁部をスライド自在に貫通してバイパス流路13内に進退し得るように設けられて、バイパス流路13内への進入量に応じてバイパス流路内を流れる作動油の単位時間当たりの流量を調節する弁体22と、制御信号Vsに応じて弁体を駆動して弁体22のバイパス流路内へ進入量を変化させる電気式アクチュエータ23とからなっている。弁体22としては例えばニードル状ないしは棒状のものを用いることができ、電気式アクチュエータ23としては、電磁石を駆動源として用いたソレノイドアクチュエータや、リニアモータを駆動源として弁体を変位させるようにしたもの、或いはモータの回転を減速するとともに直線変位に変換して弁体22に伝達するようにしたもの等を用いることができる。弁体22は、バイパス流路13から後退する側に(バイパス流量を最大にする側に)図示しない復帰バネにより付勢されている。
【0024】
図1に示されたステアリングダンパにおいては、弁体22のバイパス流路13内への進入量を変化させることにより、図3に示すようにステアリングダンパの動作特性を変化させることができる。図3の横軸はピストン11の変位速度(単位時間当たりの変位量)を示しており、縦軸はピストンに働く制動力を示している。またS0 ないしS4 (S0 <S1 <S2 <S3 <S4 )は、弁体22のバイパス流路側への変位量(ストローク)を示している。弁体22のストローク量を大きくしていく(バイパス流路内を流れる作動油の単位時間当たりの流量を少なくしていく)ことにより、ピストンの変位速度の単位増加量当たりの制動力の増加量を多くしていくことができる。
【0025】
本発明においては、車体の傾斜角と操舵角との双方に対してステアリングダンパの動作特性を調整するための制御を行わせる。そのため、本実施形態においては、自動二輪車の車体の傾斜角を検出する車体傾斜角検出器31と、操舵部材9の操舵角を検出する操舵角検出器32とが設けられている。
【0026】
車体傾斜角検出器31は、自動二輪車の後輪(駆動輪)の回転軸の中心軸線と直交する平面が鉛直面に対してなす角度を車体の傾斜角として検出する検出器である。この車体傾斜角検出器としては、例えば、1軸型または2軸型の加速度センサを利用して傾斜角を検出する公知のものを用いることができる。
【0027】
操舵角検出器32は、操舵部材9のニュートラル位置に対する操作角度を操舵角として検出する検出器で、この操舵角検出器としては、ポテンショメータ、レゾルバ、或いは磁気エンコーダと磁気センサを組み合わせた非接触式の角度センサ等を用いることができる。
【0028】
車体傾斜角検出器31及び操舵角検出器32により検出された車体傾斜角及び操舵角は、中央演算処理装置CPU、ROMやEEPROMなどの不揮発性メモリ、一次記憶メモリRAM及び各種のインターフェースなどを有するマイクロプロセッサを備えた電子式制御装置(ECU)2に入力されている。ECU2は、車体傾斜角と操舵角とに対してステアリングダンパ1の動作特性を制御する制御部を構成する。この制御部は、操舵角検出器32により検出された操舵角が車体傾斜角検出器31により検出されている傾斜角に対して設定された設定領域にあるときにピストンに働く制動力を弱くし、検出された操舵角が上記設定領域から外れて大きくなっているときには該操舵角が設定領域から外れている度合が大きい場合ほどピストン11に働く制動力を強くするように、車体傾斜角検出器31により検出された傾斜角と、操舵角検出器32により検出された操舵角との双方に対して制御信号の大きさを決定する。
【0029】
車体の各傾斜角に対して設定する操舵角の設定領域は、通常は、ニュートラルステア領域に設定すればよいが、安全をみて、ニュートラルステア領域よりも狭めに設定してもよい。ただし、コーナリング走行以外の走行状態での操舵性が損なわれるのを防止するため、直立走行に近い状態(コーナリング走行以外の走行状態)で走行しているときに生じ得る操舵角の変動範囲よりは広く設定しておく。以下の説明では、車体の各傾斜角に対して設定する操舵角の設定領域がニュートラルステア領域であるとする。なお操舵角のニュートラルステア領域とは、二輪車をバンク(傾斜)させてコーナリングする際に、その走行状態に対して干渉しない自然な操舵角の範囲を意味する。操舵部材をニュートラルステア領域を越えて内側に操作するとオーバステアとなって二輪車は内側に切れ込んでいき、逆に操舵部材をニュートラルステア領域を越えて外側に操作するとアンダーステアとなって二輪車は外側に大回りしていく。
【0030】
ECU2は、マイクロプロセッサに所定のプログラムを実行させることにより、車体の傾斜角と操舵角とに対して、所望の動作特性を得るための弁体22のストローク量を演算するストローク量演算手段201を構成する。ストローク量演算手段201は、車体傾斜角と操舵角と弁体22のストローク量(バイパス流路側への変位量)との間の関係を与える3次元マップを用いて、車体傾斜角と操舵角とに対して、弁体22の適正なストローク量を演算する。ECU2にはまたアクチュエータ駆動回路202が設けれていて、アクチュエータ駆動回路202からアクチュエータ23に(動作特性調節部21に)、演算されたストローク量だけ弁体22を変位させるために必要な大きさの制御信号Vsが与えられるようになっている。
【0031】
本実施形態において、弁体22のストローク量を演算する際に用いる3次元マップは、車体傾斜角検出器により検出された各傾斜角に対して操舵角検出器により検出された操舵角がニュートラルステア領域(設定領域)にあるときに弁体22のバイパス流路13内への進入量(ストローク量)を少なくし、検出された各傾斜角に対して検出された操舵角がニュートラルステア領域から外れているときには該操舵角がニュートラルステア領域から外れている度合が大きい場合ほど弁体22のバイパス流路13内への進入量を多くするように作成される。
【0032】
図2は、上記3次元マップの構造の一例を示したもので、同図の横軸は車体の傾斜角を示しており、縦軸は操舵角を示している。図2に波線で示した曲線Aの内側の斜線で示された領域が、操舵角のニュートラルステア領域であり、図中「少」は、弁体のストローク量を少なくする(ストローク量をゼロとする場合を含む。)ことを意味し、「多」は、弁体のストローク量を多くすることを意味している。操舵角がニュートラルステア領域にあるときの弁体のストローク量は一定でもよく、操舵角及び(または)車体の傾斜角に応じて多少変化させてもよいが、コーナリング走行以外の走行状態での操舵性を損なわないように(操舵部材に働く制動力が大きくなりすぎないように)するために、大きすぎないように設定しておく。
【0033】
操舵角のニュートラルステア領域は、車体の傾斜角に応じて変化する。運転者はコーナに進入するときに、車速に応じて車体を傾斜させる。車速を遅くしてコーナを抜けるときには、車体の傾斜角を小さくしてコーナに進入し、車速を速くしてコーナを抜けるときには、車体の傾斜角を大きくしてコーナに進入するため、コーナリング時の車体の傾斜角には、車両の走行速度が反映されている。従って、車速を検出することなく、操舵角が車体の各傾斜角に対して設定された設定領域にあるか否かにより、ステアリングダンパの動作特性を変える制御を行なうことにより、コーナリング走行時に運転者が操舵部材を切りすぎるのを抑制する制御を的確に行なわせることができる。
【0034】
制御部は、上記の3次元マップを用いて弁体のストローク量を演算して、弁体のストローク量を演算されたストローク量とするように、制御信号Vsを動作特性調節部21に与えることにより、車体の各傾斜角において操舵角がニュートラルステア領域内にあるときに弁体22のストローク量を少なくし、操舵角がニュートラルステア領域から外れているときに、操舵角がニュートラルステア領域から外れている度合が大きい場合ほど弁体22のストローク量を多くするように、車体の傾斜角と操舵角との双方に対してストローク量を制御して、ステアリングダンパ1の動作特性を調整する。
【0035】
図4は、ECU2のマイクロプロセッサが、ストローク量演算手段201を構成するために、一定の時間間隔で実行するタスク処理のアルゴリズムを示している。このタスク処理が開始されると、先ずステップS101で車体の傾斜角及び操舵角が読み込まれ、ステップS102で、不揮発性メモリに記憶された前述の3次元マップを用いて、車体の傾斜角及び操舵角に対して弁体のストローク量を演算する。次いでステップS103で弁体のストローク量を演算されたストローク量とするためにアクチュエータ22に与える制御信号Vsの大きさを求め、該制御信号Vsをアクチュエータ駆動回路202から出力させてこの処理を終了する。
【0036】
上記のように、操舵角がニュートラルステア領域から外れているときに操舵角がニュートラルステア領域から外れている度合が大きい場合ほどピストンに働く制動力を強くするように、車体の傾斜角と操舵角との双方に対して、ステアリングダンパの動作特性を制御するようにすると、車体を傾斜させてコーナリング走行をしている状態で、運転者が操舵部材をイン側に変化させる操作を行なおうとしたときに、操舵部材に働く制動力を増大させて、運転者が操舵部材をイン側に操作するのを抑制することができるため、操舵部材をイン側に切りすぎて、転倒事故が発生する危険性を減らすことができる。また車体を直立させた状態で走行しているときには操舵部材に働く制動力を弱くすることができるため、直立走行時の操舵部材の取り回しを容易にすることができる。
【0037】
ステアリングダンパ1は、操舵部材と車体フレームとの間に生じる変位に応動してピストン11に変位が生じるように、操舵部材と車体のフレームとの間に設けられればよく、ステアリングダンパ1を車体に取り付ける構造は上記の例に限定されない。
【0038】
上記の説明では、自動二輪車を例にとったが、コーナリング時に車体を傾斜させて走行することがある他の車両にも、本発明に係わるステアリング緩衝装置を適用することができる。
【0039】
上記の説明では、ECU2により、ステアリングダンパを制御する制御部のみを構成しているが、車両の駆動輪を駆動する原動機(例えばエンジン)や、原動機により駆動される発電機等の他の制御対象を制御するために車両に搭載されるECUを利用してステアリングダンパを制御する制御部を構成することができるのはもちろんである。
【符号の説明】
【0040】
1 ステアリングダンパ
2 ECU
3 車体
4 車体のフレーム
7 操舵軸
8 トップブリッジ
9 操舵部材
10 シリンダ
10a ピストン収容室
11 ピストン
12 主流路
12A 第1の主流路
12B 第2の主流路
13 バイパス流路
14 ピストンロッド
15 作動油
21 動作特性調節部
22 弁体
23 アクチュエータ
31 車体傾斜角検出器
32 操舵角検出器
201 ストローク演算手段
202 アクチュエータ駆動回路
【特許請求の範囲】
【請求項1】
作動油が収容されたシリンダと該シリンダ内で該シリンダの軸線方向に変位自在に設けられて変位に伴って前記作動油を流動させるピストンとを備えて、前記シリンダ及びピストンの一方及び他方がそれぞれ車体のフレーム及び操舵部材に連結されたステアリングダンパと、前記ピストンの変位速度と前記作動油からピストンに与えられる制動力の大きさとの間の関係を与える前記ステアリングダンパの動作特性を制御する制御部とを備え、前記車体のフレームと操舵部材との間に生じる相対的な変位に応じて前記ピストンを変位させることにより前記操舵部材とフレームとの間の変位を抑制する制動力を発生させる車両用ステアリング緩衝装置であって、
電気的な制御信号の大きさに応じて前記ステアリングダンパの動作特性を調節する動作特性調節部と、前記車体の傾斜角を検出する車体傾斜角検出器と、前記操舵部材の操舵角を検出する操舵角検出器とを備え、
前記制御部は、前記操舵角検出器により検出された操舵角が前記車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときに前記ピストンに働く制動力を弱くし、検出された操舵角が前記設定領域から外れて大きくなっているときには該操舵角が前記設定領域から外れている度合が大きい場合ほど前記ピストンに働く制動力を強くするように、前記車体傾斜角検出器により検出された傾斜角と、前記操舵角検出器により検出された操舵角との双方に対して前記制御信号の大きさを決定すること、
を特徴とする車両用ステアリング緩衝装置。
【請求項2】
前記ステアリングダンパは、前記ピストンにより仕切られる主流路と、前記ピストンの前後の主流路を相互に連通させるバイパス流路とを前記シリンダ内に有し、
前記動作特性調節部は、前記シリンダの側壁部を貫通して前記バイパス流路内に進退し得るように設けられて、前記バイパス流路内への進入量に応じて前記バイパス流路内を流れる作動油の単位時間当たりの流量を調節する弁体と、前記制御信号に応じて前記弁体を駆動して前記弁体のバイパス流路内への進入量を変化させる電気式アクチュエータとを備えている請求項1に記載の車両用ステアリング緩衝装置。
【請求項3】
前記制御部は、前記操舵角検出器により検出された操舵角が前記車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときに前記弁体のバイパス流路内への進入量を少なくし、検出された操舵角が前記設定領域から外れて大きくなっているときには該操舵角が設定領域から外れている度合が大きい場合ほど前記弁体のバイパス流路内への進入量を多くするように、前記車体傾斜角検出器により検出された傾斜角と、前記操舵角検出器により検出された操舵角との双方に対して前記制御信号の大きさを決定すること、
を特徴とする請求項2に記載の車両用ステアリング緩衝装置。
【請求項4】
前記設定領域は、検出された傾斜角における操舵角のニュートラルステア領域に等しくなるように設定されていることを特徴とする請求項1,2または3に記載の車両用ステアリング緩衝装置。
【請求項1】
作動油が収容されたシリンダと該シリンダ内で該シリンダの軸線方向に変位自在に設けられて変位に伴って前記作動油を流動させるピストンとを備えて、前記シリンダ及びピストンの一方及び他方がそれぞれ車体のフレーム及び操舵部材に連結されたステアリングダンパと、前記ピストンの変位速度と前記作動油からピストンに与えられる制動力の大きさとの間の関係を与える前記ステアリングダンパの動作特性を制御する制御部とを備え、前記車体のフレームと操舵部材との間に生じる相対的な変位に応じて前記ピストンを変位させることにより前記操舵部材とフレームとの間の変位を抑制する制動力を発生させる車両用ステアリング緩衝装置であって、
電気的な制御信号の大きさに応じて前記ステアリングダンパの動作特性を調節する動作特性調節部と、前記車体の傾斜角を検出する車体傾斜角検出器と、前記操舵部材の操舵角を検出する操舵角検出器とを備え、
前記制御部は、前記操舵角検出器により検出された操舵角が前記車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときに前記ピストンに働く制動力を弱くし、検出された操舵角が前記設定領域から外れて大きくなっているときには該操舵角が前記設定領域から外れている度合が大きい場合ほど前記ピストンに働く制動力を強くするように、前記車体傾斜角検出器により検出された傾斜角と、前記操舵角検出器により検出された操舵角との双方に対して前記制御信号の大きさを決定すること、
を特徴とする車両用ステアリング緩衝装置。
【請求項2】
前記ステアリングダンパは、前記ピストンにより仕切られる主流路と、前記ピストンの前後の主流路を相互に連通させるバイパス流路とを前記シリンダ内に有し、
前記動作特性調節部は、前記シリンダの側壁部を貫通して前記バイパス流路内に進退し得るように設けられて、前記バイパス流路内への進入量に応じて前記バイパス流路内を流れる作動油の単位時間当たりの流量を調節する弁体と、前記制御信号に応じて前記弁体を駆動して前記弁体のバイパス流路内への進入量を変化させる電気式アクチュエータとを備えている請求項1に記載の車両用ステアリング緩衝装置。
【請求項3】
前記制御部は、前記操舵角検出器により検出された操舵角が前記車体傾斜角検出器により検出されている傾斜角に対して設定された設定領域にあるときに前記弁体のバイパス流路内への進入量を少なくし、検出された操舵角が前記設定領域から外れて大きくなっているときには該操舵角が設定領域から外れている度合が大きい場合ほど前記弁体のバイパス流路内への進入量を多くするように、前記車体傾斜角検出器により検出された傾斜角と、前記操舵角検出器により検出された操舵角との双方に対して前記制御信号の大きさを決定すること、
を特徴とする請求項2に記載の車両用ステアリング緩衝装置。
【請求項4】
前記設定領域は、検出された傾斜角における操舵角のニュートラルステア領域に等しくなるように設定されていることを特徴とする請求項1,2または3に記載の車両用ステアリング緩衝装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−171567(P2012−171567A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−37898(P2011−37898)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000001340)国産電機株式会社 (191)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000001340)国産電機株式会社 (191)
【Fターム(参考)】
[ Back to top ]