
車体側面の変形有無を判定する方法及び装置、並びに、車両用乗員側方保護具の起動制御装置
【課題】 衝突による車体側面の変形と連動して変位する車体部位に生ずる車体の変形と移動とが合成された加速度信号を用いつつも、車体の衝突側側面に実際に変形が生じたか否かを的確に判定可能とすること。
【解決手段】 衝突による車体側面の変形と連動して変位する第1の車体部位に生ずる加速度を検出する手段と、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に生ずる加速度を検出する手段と、前記検出される第1の車体部位に生ずる加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記検出される第2の車体部位に生ずる加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記分析により得られた両周波数成分に基づいて車体側面の変形有無を判定する手段と、を具備する。
【解決手段】 衝突による車体側面の変形と連動して変位する第1の車体部位に生ずる加速度を検出する手段と、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に生ずる加速度を検出する手段と、前記検出される第1の車体部位に生ずる加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記検出される第2の車体部位に生ずる加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記分析により得られた両周波数成分に基づいて車体側面の変形有無を判定する手段と、を具備する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】この発明は、例えば、車体適所に取付けられた1もしくは2以上の加速度センサの出力に基づいて、車体側面の変形有無、すなわち乗員を収容する乗員室(キャビン)側面の変形有無可能性を判定する装置に係り、例えば、車両用側方エアバッグ起動制御システムの信頼性向上等の用途に好適な車体側面の変形有無を判定する装置に関する。
【0002】
【従来の技術】側方エアバッグの作動が必要とされる代表的な事象としては、次の2つの事象が存在する。その1つは、他の車両等の重量物が高速に乗員に近い車体側面に衝突し、これにより乗員が慣性によりドア側へ移動するよりも早く、ドアインナパネル等の方が先に車室内に侵入(イントルージョン)して乗員が傷害を受ける事象である。他の1つは、他の車両等の重量物が比較的に中程度の速度で乗員に近い車体側面に衝突し、イントルージョンはさほど大きくはないものの、イントルージョンと慣性によるドア側への移動とが相まって、乗員がドア内側に強く衝突して傷害を受ける事象である。
【0003】これらの事象に的確に対応するためには、ドア内に圧縮スイッチ等のセンサをあらかじめ埋め込んでおき、衝突によるイントルージョンによってそれらが作動するのに応答して、側方エアバッグを作動させることが考えられる。
【0004】しかしながら、このような方法によると、この種の圧縮スイッチ等のセンサの検知範囲は比較的狭いため、想定されるあらゆる側面衝突態様に対応するためには、車体側面に相当数のセンサを埋め込まねばならず、コストアップを来す結果となる。また、電柱等が車体のセンタピラー(Bピラー)に衝突した場合のように、衝突速度は高くてもドアの変形に及ぼす影響が小さい場合には、いかにドア面での検知範囲を広げたとしても、それらセンサが作動しない場合も考えられる。
【0005】そこで、このような圧縮スイッチ等のセンサを用いるのではなく、車体の側面、特に、センタピラー下端部やサイドシル等といった比較的剛性の高い車体部位に加速度センサを取付け、この加速度センサで検出される車体側面の変形と車体全体の移動とが合成された加速度を、例えば、特開平4−325349号公報に示されるように、積分時間の異なる複数の区間積分器(一般には、移動積分処理としてソフトウェア的に実現される)を介して監視することにより、様々な側面衝突態様に対応することが考えられる。
【0006】このような構成によれば、車体側面に取付けられた加速度センサは、車体の比較的剛性の高い部分に取付けられているため、1個の加速度センサによって車体側面の比較的広範囲にわたる衝突に対応することができ、しかも事象の相違に対しては、区間積分器の積分時間や判定閾値の調整により回路的又はソフトウェア的に対応できるため、構成が簡単で低コストに製作できる利点がある。
【0007】例えば、他の車両等の重量物が高速に乗員に近い車両側面に衝突し、慣性により乗員がドア側へ移動するよりも早く、ドアインナパネル等の方が先に車室内に侵入(イントルージョン)して乗員が傷害を受ける事象(以下、高速側面衝突と言う)に対しては、積分時間(積分区間)を短かめ(5ms程度)に設定しかつ区間積分結果を所定のしきい値と比較することで、このような事象を判定することができる。
【0008】また、他の車両等の重量物が比較的に中程度の速度で乗員に近い車両側面に衝突し、イントルージョンはさほど大きくはないものの、イントルージョンと慣性によるドア側への移動とが相まって、乗員がドア内側に強く衝突して傷害を受ける事象(以下、中速側面衝突と言う)に対しては、積分時間を長め(10〜40ms程度)に設定しかつ区間積分結果を所定の閾値と比較することにより、このような事象を判定することができる。
【0009】
【発明が解決しようとする課題】しかしながら、上述のような側方エアバッグ起動制御システムにあっては、車体側面の変形と車両全体の移動とが合成された加速度の区間積分結果(積分区間内における速度変化量に相当)を監視し、その区間積分結果が所定の閾値を超えさえすれば、側方エアバッグの起動必要ありと無条件で判定するようになっているため、積分区間内における速度変化量の割には乗員への影響が少ない特殊な側面衝突態様では、乗員が傷害を受ける程の衝撃がないにも拘わらず、側方エアバッグの作動が必要であると誤判定される虞がある。
【0010】例えば、車両が横すべりして道路縁石に衝突(以下、縁石側面衝突と言う)したり、車両走行中に道路縁石に斜め横方向から進入して衝突したのち斜め横方向に跳ね返される衝突(以下、縁石斜め跳ね返りと言う)をしたような場合を想定すると、このような側面衝突態様にあっては、車両側面ホイール並びにサイドシルが道路縁石に衝突すると言った剛体同士の衝突となるため、その衝突速度が乗員への傷害の虞がないほどの低速であっても、衝突直後の積分区間内における速度変化量の値はかなり高い値となり、実際、先に述べた中速側面衝突の判定論理を適用すると、側方エアバッグの作動が必要であると誤判定される虞があることが判明した。また、低速の縁石側面衝突においては、高速側面衝突の判定論理条件に匹敵する程の短区間の急峻な速度変化量となることも判明した。
【0011】加えて、乗員室側面の変形が僅かな車両前部側面若しくは後部側面への衝突(以下、オフセット側面衝突と言う)等においても、その衝突速度が乗員への傷害の虞がないほどの低速であっても、衝突直後の積分区間内における速度変化量の値はかなり高い値となり、実際、先に述べた中速側面衝突の判定論理を適用すると、側方エアバッグの作動が必要であると誤判定される虞があることが判明した。
【0012】このような判定の様子を図25を参照して更に説明する。同図において、(a)は中速側面衝突等のように側方エアバッグの作動を必要とする側面変形を有する衝突の場合における加速度の全時間積分結果(衝突直後から約100ms後までの全時間積分結果)の時間的な推移を示すグラフ、(b)は低速縁石側面衝突等のように側方エアバッグの作動を必要としない側面変形を有しない衝突の場合における加速度の全時間積分結果(衝突直後から100ms後までの全時間積分結果)の時間的な推移を示すグラフである。
【0013】尚、これらのグラフにおいて、t1は衝突判定を完了すべき時刻、t2は乗員が傷害を受ける虞のある時刻、Tは側方エアバッグの作動に必要とされる時間であり、また実線は衝突側の側面に取付けられた加速度センサの出力に対応した値、破線は衝突側の側面と反対側の側面に取付けられた加速度センサの出力に対応する値である。
【0014】図25(a)に示されるように、側面変形を有する衝突の場合、衝突側(インパクト側)における加速度の全時間積分結果は、図中ハッチングにて示される車体変形成分の存在に起因して、比較的急峻に立上がり、判定時刻t1を経過した以降についても上昇を継続する。ところが、図25(b)に示されるように、側面変形を有しない衝突の場合であっても、例えば車両側面ホイールやサイドシルと縁石との衝突といった剛体同士の衝突の場合には、両者の衝突速度が比較的低いにも拘らず、全時間積分結果は側面変形を有する衝突の場合と同様に急峻に立上がり、側面変形を有する衝突の場合と同様なレベルにまで達する。
【0015】ここで、衝突判定に用いられる加速度の区間積分値とは、図26に示されるように、予め決められた積分時間(区間)ΔTに亘り加速度センサの出力G(k)を積分した値、すなわち図25(a),(b)に示される曲線の傾きとほぼ見なすことができる。そのため、加速度の区間積分結果を所定の1個の閾値と比較して側方エアバッグの作動要否を判定しようとする限り、図25(a)に示されるような側方エアバッグの作動を必要とする中速側面衝突等の場合と、図25(b)に示されるような側方エアバッグの作動を必要としない低速縁石側面衝突等とを識別することが困難となる。
【0016】ここにおいて、本発明者等は、加速度センサの出力に基づいて車体側面の変形、すなわち乗員を収容するキャビンの変形有無それ自体を直接的に判定することができれば、上述した図25(a)の場合と図25(b)の場合とを容易に区別できるとの着想に基づき鋭意研究の結果、次のような知見を得た。
【0017】即ち、衝突による車体側面の変形と連動して変位する車体部位に取付けられた加速度センサの過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、両周波数分布に一定の相関が見られる(以下、第1の知見と言う)。
【0018】また、衝突による車体側面の変形と連動して変位する第1の車体部位に取り付けられた加速度センサ、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に取り付けられた加速度センサの出力に関しても、過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、両者間に一定の相関が見られる(以下、第2の知見と言う)。
【0019】そして、これらの相関は、車体側面が変形する際に生ずる特有な周波数成分の有無に起因するものであると推定される。
【0020】この発明は、上述した本発明者等による新たな知見に基づきなされたものであり、その目的とするところは、衝突による車体側面の変形と連動して変位する車体部位に生ずる、車体の変形と車体の移動とが合成された加速度信号を用いつつも、車体の衝突側側面に実際に変形が生じたか否かを的確に判定可能とすることにある。
【0021】
【課題を解決するための手段】先に説明したように、本発明者等は、加速度センサの出力に基づいて車体側面の変形、すなわち乗員を収容するキャビンの変形有無を直接的に判定することができれば、上述した図25(a)の場合と図25(b)の場合とを容易に区別できるとの着想に基づき鋭意研究の結果、次のような2つの知見を得た。
【0022】即ち、衝突による車体側面の変形と連動して変位する車体部位に取付けられた加速度センサの過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、図1(I)(a),図1(II)(a’)に示されるように、両周波数分布に一定の相関が見られる(第1の知見)。
【0023】また、衝突による車体側面の変形と連動して変位する第1の車体部位に取り付けられた加速度センサ、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に取り付けられた加速度センサの過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、図1(I)における(a)と(b)もしくは(c)との比較、並びに、図1(II)における(a’)と(b’)もしくは(c’)との比較から明らかなように、両者間に一定の相関が見られる(第2の知見)。
【0024】これらの相関は、車体側面が変形する際に生ずる特有な周波数成分の有無に起因するものであると推定される。
【0025】以下、第1の知見に基づいて、変形有無の判定に必要とされる加速度検出点を側面変形感応部(例えば、衝突側側面等)のみとする発明をシングルポイントタイプの発明、第2の知見に基づいて、変形有無の判定に必要とされる加速度検出点を側面変形感応部(例えば、衝突側側面等)と側面変形不感応部(例えば、車体中央部、及び/又は、車体反対側側面)との双方とする発明をマルチプルポイントタイプの発明と称することとする。
【0026】先ず、最初に、シングルポイントタイプの発明について説明する。
【0027】この発明では、先ず、衝突による車体側面の変形と連動して変位する車体部位に生ずる加速度が検出される。続いて、前記検出される加速度の過去所定時間内における変化に含まれる周波数成分が分析される。最後に、前記分析により得られた周波数成分に基づいて車体の衝突側の側面の変形有無が判定される。
【0028】この発明によれば、1個の加速度センサからの出力のみで、監視対象となる車体側面に変形の有無を判定することができ、左右いずれか一方の車体側面のみに側方エアバッグを備え付けるような場合には、側面変形判定用の加速度センサが1個で済むことになる。
【0029】ここで、加速度変化に含まれる周波数成分の分析に必要とされる『過去所定時間』の時間長をどの程度に設定すべきかは、様々な観点から決定される。基本的には、『過去所定時間』に言う時間長は、側面衝突開始からどの程度の時間(衝突判定所要最大時間)内に乗員側方保護具(例えば、側方エアバッグ等)の作動が必要である旨の判定を完了せねばならないかに基づいて決定される。この衝突判定所要最大時間の値は、車体の構造(特に、側面の剛性等)や乗員側方保護具(例えば、側方エアバッグ等)の展開所要時間等により変動する。『過去所定時間』に言う時間長は、一般的には、5ms〜30ms程度の長さに設定することが好ましい。
【0030】また、前記車体側面に変形の有無の判定は、前記分析により得られる周波数成分を所定の判定論理に照らすことにより行なうことができる。この判定論理は、図1(I)(a)と図1(II)(a´)とに示される周波数成分の分布曲線の相違を前提として、イントルージョン(側面変形)の生じていない時間帯とイントルージョンの生じている時間帯とを確実に識別できるように意図されている。
【0031】判定論理の一例としては、前記分析により得られた周波数成分のうちの高域周数成分に着目するものを挙げることができる。すなわち、この判定論理では、高域周波数成分と基準値との比較結果に基づいて、車体側面に変形の有無が判定される。より具体的には、高域周波数成分が基準値よりも多い場合には車体側面に変形が生じているものと判定され、また高域周波数成分が基準値よりも少ない場合には車体側面に変形が生じていないものと判定される。
【0032】前記判定論理の他の一例としては、前記分析により得られた周波数成分のうちの低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と高域周波数成分との相対関係に着目するものを挙げることができる。すなわち、この判定論理では、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、高域周波数成分との、比較結果に基づいて、車体側面に変形の有無が判定される。この比較手法の一例では、前記分析により得られた周波数成分のうちの低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、高域周波数成分の比が、基準値よりも大きい場合には車体側面に変形が生じているものと判定され、また低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、高域周波数成分の比が、基準値よりも小さい場合には車体側面に変形が生じていないものと判定される。
【0033】以上2つの判定論理を特に例示したのは、これらの判定論理によれば、図1(I)(a)と図1(II)(a’)とに示される周波数成分の分布曲線の相違を前提とすると、車体側面に変形の生ずる場合と車体側面に変形の生じない場合とが明確に区別されるからである。
【0034】次に、マルチプルポイントタイプの発明について説明する。
【0035】この発明では、衝突による車体側面の変形と連動して変位する第1の車体部位に生ずる加速度、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に生ずる加速度が検出される。続いて、前記第1の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分、並びに、前記第2の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分がそれぞれ分析される。最後に、前記分析により得られた両周波数成分に基づいて車体側面の変形有無が判定される。
【0036】この発明によれば、衝突による車体側面の変形と連動して変位する第1の車体部位と実質的に変位しない第2の車体部位とからなる2箇所の車体部位に生ずる加速度を側面変形判定に利用しているため、より一層精度の高い側面変形判定結果を得ることができる。
【0037】ここで、前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位とすることができる。そのようにすれば、車体の左右両側面の変形を判定すべく、第1の車体部位を車体の軸線を挟んで左右対称的に配置した場合に、第2の車体部位を共通の一カ所で兼用することができる。加えて、第2の車体部位の加速度検出用のセンサを、従前からセンタトンネル上に配置されている前方エアバッグ用の加速度センサと共用すれば、別途加速度センサを備える必要がない。
【0038】また、前記第2の車体部位とは、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位とすることもできる。そのようによれば、車体の左右両側面の変形を判定すべく、第1の車体部位を車体の軸線を挟んで左右対称的に配置した場合に、それら2箇所の車体部位の一方が相互に第2の車体部位を兼ねることとなり、別途専用の第2の車体部位を設けることが不要となる。
【0039】さらに、前記第2の車体部位とは、車体の前後方向へ延びる軸線付近の点に位置する車体部位と、車体の前後方向へ延びる軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位との2箇所の部位として多重化することもできる。そのようによれば、全体として3個の加速度センサを用いてより信頼性の高い制御を実現できる。
【0040】ここで、前記車体側面の変形の有無の判定は、前記第1の車体部位に生ずる加速度の分析により得られる周波数成分と、前記第2の車体部位に生ずる加速度の分析により得られる周波数成分とを、所定の判定論理に照らすことにより行なうことができる。この判定論理は、図1(I)(a)と図1(I)(b),(c)との比較、並びに、図1(II)(a’)と図1(II)(b’),(c’)との比較から理解される周波数成分の分布の相違を前提として、イントルージョン(側面変形)の生じていない時間帯とイントルージョンの生じている時間帯とを確実に識別できるように意図されている。
【0041】前記判定論理の一例としては、前記第1の車体部位で検出された加速度の高域周波数成分と、前記第2の車体部位で検出された加速度の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との相対関係に着目したものを挙げることができる。すなわち、この判定論理では、前記第1の車体部位で検出された加速度の高域周波数成分と、前記第2の車体部位で検出された加速度の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面の変形の有無が判定される。比較手法の一例では、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定される。一方、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも大きい場合には、車体側面に変形が生じていないものと判定される。
【0042】前記判定論理の他の一例としては、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との相対関係に着目したものを挙げることができる。すなわち、この判定論理では、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面の変形の有無が判定される。比較手法の一例では、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定される。一方、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも大きい場合、もしくは両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定される。
【0043】前記判定論理の他の一例としては、前記第1の車体部位側の高域周波数成分と前記第2の車体部位側の高域周波数成分との相対関係に着目したものを挙げることができる。すなわち、この判定論理では、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の高域周波数成分との、比較結果に基づいて、車体側面の変形有無が判定される。比較手法の一例では、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の高域周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定される。一方、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の高域周波数成分の比が、基準値よりも大きい場合、もしくは両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定される。
【0044】以上3つの判定論理を例示したのは、これらの判定論理によれば、図1(I)(a)と図1(I)(b),(c)との比較、並びに、図1(II)(a’)と図1(II)(b’),(c’)との比較から理解される周波数成分の分布の相違を前提とすると、車体側面に変形の生ずる場合と車体側面に変形の生じない場合とが明確に区別されるからである。
【0045】尚、本発明において、検出された加速度の周波数成分を分析する手法の一例としては、車体部位で検出された加速度を各種のフィルタによりフィルタリングすることにより目的とする周波数帯域を抽出し、その符号付きの値もしくは絶対値を所定区間に亘り積分するものを挙げることができる。
【0046】本発明において、車体側面の変形有無判定に必要とされる周波数成分同士もしくは周波数成分と所定値との比較は、それらの2値化信号のオンタイミング同士を時間的に比較することによっても行なうこともできる。そのようなオンタイミング同士の時間比較によれば、回路構成の簡素化、並びに、加速度データを直接にユニット間で伝送する場合に比べて、ノイズの影響を受けにくい利点がある。
【0047】このオンタイミング同士の時間比較の考え方を、シングルポイントタイプの発明に適用する場合には、衝突側の加速度検出ユニット内に、周波数成分2値化用の2値化手段が内蔵される。この場合、オンタイミング同士の時間比較を行なう判定手段の位置は、当該衝突側の加速度検出ユニット内でもよいし、例えば車体中央のセンタトンネル上に通常設けられる制御ユニット内でもよい。
【0048】判定手段における車体側面の変形有無判定は、一例としては、加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと所定の基準タイミングとの比較結果に基づいて行うことができる。
【0049】判定手段における車体側面の変形有無判定は、他の一例としては、加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと前記加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行うことができる。
【0050】一方、このオンタイミング同士の時間的比較の考え方を、マルチプルポイントタイプの発明に適用する場合には、衝突側並びに衝突側と反対側(含む中央)の加速度検出ユニットの双方に、周波数成分2値化用の2値化手段が内蔵される。
【0051】この場合、オンタイミング同士の時間的比較を行なう判定手段の位置は、衝突側並びに衝突側と反対側(含む中央側)の加速度検出ユニットのいずれでもよいし、それ以外のどこでもよい。
【0052】判定手段における車体側面の変形有無の判定は、一例としては、衝突側の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、衝突側と反対側(含む中央側)の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの、比較に基づいて行なうことができる。
【0053】判定手段における車体側面の変形有無の判定は、他の一例としては、衝突側の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングと、衝突側と反対側(含む中央側)の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの、比較に基づいて行なうことができる。
【0054】判定手段における車体側面の変形有無の判定は、他の一例としては、衝突側の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、衝突側と反対側(含む中央側)の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングとの、比較に基づいて行なうことができる。
【0055】以上説明したシングルポイントタイプ、マルチプルポイントタイプ、並びに、オンタイミング時間比較タイプの変形有無判定装置は、車両用乗員保護具(例えば、側方エアバッグ等)の起動制御装置において、車体側面変形時適用の第1衝突判定系と車体側面非変形時適用の第2衝突判定系との切り換え制御に利用することができる。
【0056】
【発明の実施の形態】以下、この発明の好ましい実施の形態につき添付図面を参照して詳細に説明する。
【0057】[判定原理]先に説明したように、本発明者等は、加速度センサの出力に基づいて車体側面の変形、すなわち乗員を収容するキャビンの変形の有無を直接的に判定することができれば、前述した図25(a)の場合と図25(b)の場合とを容易に区別できるとの着想に基づき鋭意研究の結果、次のような知見を得た。
【0058】即ち、衝突による車体側面の変形と連動して変位する車体部位に取付けられた加速度センサの過去所定時間内における出力に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる時間帯と変形の生じない時間帯とでは、両周波数成分分布に一定の相関が見られる(第1の知見)。
【0059】また、衝突による車体側面の変形と連動して変位する第1の車体部位に取り付けられた加速度センサ、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に取り付けられた加速度センサの過去所定時間内における出力に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる時間帯と変形の生じない時間帯とでは、両センサ系の周波数成分分布には一定の相関が見られる(第2の知見)。
【0060】そして、これらの相関は、車体側面が衝突により変形する際に生ずる特有な周波数成分の有無に起因するものであると推定される。すなわち、イントルージョンは主に車両構成部材の変形量に起因する加速度信号中の低域周波数成分と車両構成部材の破断、圧壊等に起因する加速度信号中の高域周波数成分とを伴なうものと推定される。
【0061】図1には、このような知見の代表的なものとして、車体の衝突側の側面(車体衝突側側面:図5(b)の点P1)、車体の前後方向へ延びる中心軸線付近の部位(車体中央部:図5(b)の点P2)、並びに、車体の衝突側の側面と反対側の側面(車体反対側側面:図5(b)の点P3)のそれぞれに対応して取り付けられた3個の加速度センサの過去所定時間内における出力に含まれる周波数成分分布が、イントルージョンの生じていない時間帯(又は、イントルージョンの伴わない衝突)(I)と、イントルージョンの生じている時間帯(II)とでどの様に相違するかが示されている。
【0062】図1(I)(a)と図1(II)(a´)とを参照して明らかなように、イントルージョンが生じておらず車両の移動のみとなる時間帯(又は、イントルージョンを伴わない衝突の場合)(I)とイントルージョンが生じている時間帯(II)とで、車体衝突側側面に対応する加速度センサ出力の周波数成分の分布を比較すると、低域周波数成分については、両者(I)(II)間にさほど大きな差異は認められないのに対して、高域周波数成分については、前者(I)に比べて後者(II)の方が遙かに大きいことが認められる。換言すれば、後者(II)の場合には、加速度センサ出力の周波数成分は低域から高域に及ぶ幅広い周波数帯域に分布しているのに対して、前者(I)の場合には、低域に大きく偏って分布しており、高域周波数成分は殆ど存在しないことが認められる。このことからすると、車体の衝突側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の含有量、もしくは、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する高域周波数成分の比と、車体側面のイントルージョンの有無との間には一定の相関があることが理解される。
【0063】次に、図1(I)(a)、同図(I)(b)、並びに、同図(I)(c)を参照して明らかなように、イントルージョンが生じておらず車両の移動のみとなる時間帯(又は、イントルージョンを伴わない衝突の場合)(I)における、車体衝突側側面、車体中央部、並びに、車体反対側側面のそれぞれに対応して取り付けられた3個の加速度センサの出力の周波数成分分布を相互に比較すると、いずれの周波数成分分布もほぼ同じであり、加速度信号の過去所定時間内に含まれる周波数成分は大きく低域に偏って分布しており、高域には殆ど存在しないことが認められる。換言すれば、車両の移動(並進運動、及び/又、回転運動)が加速度センサ出力の周波数成分に与える影響は主に低域に限って見られ、また車体のあらゆる箇所で同様に見ることができる。
【0064】また、図1(II)(a´)、図1(II)(b´)、並びに、図1(II)(c´)を参照して明らかなように、イントルージョンが生じている時間帯(II)における車体衝突側側面、車体中央部、並びに、車体反対側側面のそれぞれに対応して取り付けられた3個の加速度センサの出力の周波数成分分布を相互に比較すると、車体衝突側側面に対応する加速度センサの出力に含まれている高域周波数成分は、車体中央部もしくは車体の反対側側面に対応する加速度センサの出力には殆ど含まれていないことが認められる。加えて、各加速度センサの出力に含まれる低域周波数成分について見ると、車体中央部もしくは車体反対側側面の加速度センサの出力に含まれる低域周波数成分の値は、車体の衝突側側面の加速度センサの出力に含まれる低域周波数成分の値に比べてかなり小さいことが認められる。イントルージョンは主に車両構成部材の変形量に起因する加速度信号中の低域周波数成分と車両構成部材の破断、圧壊等に起因する加速度信号中の高域周波数成分とを伴なうものと推定される。そのため、イントルージョンが加速度信号中の周波数成分に与える影響は低域成分並びに高域成分の双方に見られる。但し、イントルージョンの影響が現れるのは、車体の変形領域に取り付けられた加速度センサの出力信号中に限られる。
【0065】これらのことからすると、■車体衝突側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分と、車体中央部もしくは車体反対側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)との比、■車体衝突側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)と、車体中央部もしくは車体反対側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)との比、もしくは、■車体衝突側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分と、車体中央部もしくは車体反対側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分との比、と、車体側面にイントルージョンの有無との間には、一定の相関があることが理解される。
【0066】
【0067】次に、図2(a)と図2(b)とを参照して明らかなように、イントルージョンを伴う衝突の場合には、図2(a)に示されるように、イントルージョンが緩衝材の働きをなすことから、車体移動開始時点は実際の衝突時点よりも数ms程度だけ遅れる。そのため、車体衝突側側面に比べ、車体中央部もしくは車体反対側側面に対応する加速度センサの出力立ち上がりタイミングは車体衝突側側面に対応する加速度センサの出力立ち上がりタイミングよりも数ms程度だけ遅れることとなる。これに対して、イントルージョンを伴わない車両の移動のみの衝突の場合には、図2(b)に示されるように、車体全体で同時に車両移動が開始される。そのため、車体衝突側側面、車体中央部、並びに、車体反対側側面にそれぞれ対応する3個の加速度センサから出力される信号の立ち上がり時点はほぼ同時となる。
【0068】このことからすれば、車体衝突側側面に対応する加速度センサ出力の立ち上がりタイミングと車体中央部もしくは車体反対側側面に対応する加速度センサ出力の立ち上がりタイミングとの時間差と、車体側面にイントルージョンの有無との間にも、一定の相関があることが理解される。
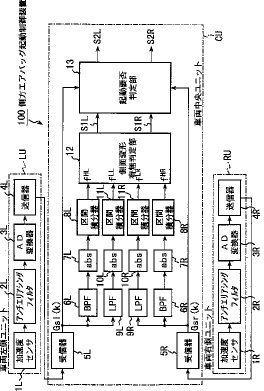
【0069】[第1実施形態]次に、以上説明した種々の相関を利用して車体側面に変形の有無を判定する方法及び装置が適用された、側方エアバッグ起動制御装置の電気的な全体構成を図4のブロック図を参照して説明する。
【0070】同図から明らかなように、この側方エアバッグ起動制御装置100は、車両の左側の側面に対応して車体所定部位(例えば、図5(b)の点P1)に取付けられる車両左側ユニットLUと、車両の右側の側面に対応して車体所定部位(例えば、図5(b)の点P3)に取付けられるべき車両右側ユニットRUと、車両の車幅方向の中央(車両の進行方向へ延びる中心軸線近傍)の所定位置(例えば、図5(b)の点P2)に取付けられる車両中央ユニットCUとから構成されている。
【0071】これらユニットLU,RU,CUの取付け可能位置が、図5の車体構造図により示されている。同図(a)は側面から見た車体構造図であり、また同図(b)は上面から見た車体構造図である。
【0072】図において、14Lは左側Aピラー、15L,15Rは左側並びに右側のBピラー、16Lは左側Cピラー、17L,17Rは左側並びに右側のサイドシル、18Lは左側前ドアインナパネル、19Lは左側前ドアビーム、20はセンタトンネル、21は前席クロスメンバである。
【0073】先に説明したように、加速度センサを内蔵する車両左側ユニットLU並びに車両右側ユニットRUは、それぞれ車体右側面若しくは左側面の広範な領域に対する側面変形を検知し得るように比較的剛性の高い車体部位、すなわち衝突による車体側面の変形と連動して変位する車体部位に取付けられる。
【0074】『衝突による車体側面の変形と連動して変位する車体部位』としては、適用される車種並びにその構造に応じて様々な部位が考えられる。基本的には、衝突による車体側面の変形と連動して多少なりとも変位する領域(例えば、図5(b)にハッチングで概略的に示される領域)にある車体部位であればどこでも差し支えないわけであるが、その変位が比較的に大きいことが望ましいであろう。このような観点に立てば、図5(a)並びに図5(b)に示されるように、例えば車種としてセダンを想定すれば、このような車体部位としては、車両乗員室の側面周囲を縁取る左右のセンタピラー(Bピラー)15L,15R、左右のフロントピラー(Aピラー)14L、左右のリアピラー(Cピラー)16L、サイドルーフフレーム25等を挙げることができ、さらに車両乗員室の側面それ自体を構成するドア(ドアアウタパネルの内部、ドアインナパネル18L,24Lの内外、ドアビーム19L,23L等を含む)もその候補として挙げることができる。
【0075】もっとも、自転車等の軽量物の衝突やドア閉め等による誤判定回避を考慮した場合には、このような変形検出用の車体部位としての候補はより狭められるであろう。すなわち、この場合には、上述のセンタピラー15L,15R、フロントピラー14L、リアピラー16Lに関しては、フロアに近い下端部近傍が好ましく、中でも、乗員に近い部位の変形を監視するという観点と、車体前後の中間に位置すると言う観点からは、センタピラー15L,15Rの下端部近傍が最も好ましいと考えられる。
【0076】また、センタピラー15L,15Rとの剛性が高く、センタピラー15L,15Rの過大な変形応力を受けて変形することを考慮すれば、サイドシル17L,17Rもその候補として挙げることができる。このサイドシル17L,17Rに関しては、前部、前席クロスメンバ21の付け根付近、中央部、センタピラー15L,15Rの付け根付近、後席クロスメンバ22の付け根付近、後部等をその候補として挙げることができる。
【0077】また、サイドシル17L,17Rとの剛性が高いことを考慮すれば、前席並びに後席のクロスメンバ21,22もその候補として挙げることができる。このクロスメンバ21,22に関しては、最外端部から精々センタトンネル20までの中間位までの部位をその候補として挙げることができる。
【0078】さらに、フロアパネル(フロアパン)に関しても、最外端部から精々センタトンネル20までの中間位までの部位をその候補として挙げることができるであろう。
【0079】そして、このような部位に取り付けられた車両左側ユニットLU並びに車両右側ユニットRUに内蔵される加速度センサによれば、衝突により車体側面に生ずる変形並びに車両全体の移動の合成された加速度を比較的正確に検出することができる。
【0080】次に、図4に戻って、車両左側ユニットLU並びに車両右側ユニットRUは、それぞれ加速度センサ1L,1R、アンチエリアシングフィルタ2L,2R、AD変換器3L,3R、送信器4L,4Rを含んでいる。
【0081】加速度センサ1L,1Rとしては、例えばピエゾ抵抗変化を利用する応力歪みゲージを半導体基板上に組込んだ加速度センサ、静電容量型加速度センサ、圧電素子を用いた加速度センサ等のような種々の構造のものを採用することができる。なお、ここで必要な加速度の方向は主として車体側方であるが、センサそれ自体としては一つのセンサで二軸及び三軸の加速度を検出できるものを使用することもできる。
【0082】アンチエリアシングフィルタ2L,2Rは、AD変換に際する折り返し誤差を除去するためのものであり、種々の構成よりなる公知のフィルタ機能を利用することができる。
【0083】AD変換器3L,3Rは、アンチエリアシングフィルタ2L,2Rを介して供給される加速度センサ1L,1Rの出力を左右の離散値加速度データGsl(k)、Gsr(k)にAD変換するものであり、種々の構成よりなる公知のAD変換回路を採用することができる。
【0084】送信器4L,4Rは、このようにして得られた離散値加速度データGsl(k),Gsr(k)を、車両中央ユニットCUへと送信するためのものである。
【0085】一方、このようにして、車両左側ユニットLU,車両右側ユニットRUから送信された離散値加速度データGsl(k)、Gsr(k)は、車両中央ユニットCU側の受信機5L,5Rによって受信される。
【0086】送信器4L,4R並びに受信器5L,5Rとしては、例えば高速伝送用の専用通信プロトコルで結ばれた一対の専用ICを車両左側並びに右側ユニットLU,RUと車両中央ユニットCUとのそれぞれに搭載することで構成することができる。またこれ以外にも、例えばインタフエイス回路とマイクロコンピュータにより独自の通信プロトコルに基づいて通信を行う構成とすることもできる。
【0087】次に、受信器5L,5Rにて受信された離散値加速度データGsl(k)、Gsr(k)は、それぞれ3系統の信号に分岐される。
【0088】即ち、受信機5Lで受信された離散値加速度データGsl(k)は、側方エアバッグの起動要否を判定する起動要否判定部13へ直接に至る第1の系統と、バンドパスフィルタ6L,絶対値変換器7L,区間積分器8Lからなる左側高周波エネルギー抽出系(ここで言うエネルギーとは、周波数成分の含有量を意味する。)である第2の系統と、ローパスフィルタ9L,絶対値変換器10L,区間積分器11Lからなる左側低周波エネルギー抽出系である第3の系統に分岐される。
【0089】同様にして、受信機5Rから得られる離散値加速度データGsr(k)は、側方エアバッグの起動要否を判定する起動要否判定部13へ直接に至る第1の系統と、バンドパスフィルタ6R,絶対値変換器7R,区間積分器8Rからなる右側高周波エネルギー抽出系である第2の系統と、ローパスフィルタ9R,絶対値変換器10R,区間積分器11Rからなる右側低周波エネルギー抽出系である第3の系統とに分岐される。
【0090】左側高周波エネルギー抽出系を構成するバンドパスフィルタ6L並びに右側高周波エネルギー抽出系を構成するバンドパスフィルタ6Rは、図1を参照して説明したように、加速度センサ1L並びに1Rから出力される加速度信号の高域周波数成分を抽出するためのものであり、また左側低周波エネルギー抽出系を構成するローパスフィルタ9L並びに右側低周波エネルギー抽出系を構成するローパスフィルタ9Rは、図1を参照して説明したように、加速度センサ1L並びに1Rから出力される加速度信号の低域周波数成分をそれぞれ抽出するためのものである。なお、当業者であれば容易に理解されるであろうが、これらのフィルタ6L,6R,9L,9Rの機能は、マイクロコンピュータにてソフトウェア的に実現することができる。
【0091】これらのバンドパスフィルタ6L,6R並びにローパスフィルタ9L,9Rを介して抽出された信号は、続いてその後段に設けられた絶対値変換器7L,7R並びに10L,10Rによってその絶対値に変換され、更にその後段に設けられた区間積分器8L,8R並びに11L,11Rにより所定の積分時間(例えば、5ms〜30ms)をもって区間積分され、その結果、左側加速度センサ1L並びに右側加速度センサ1Rの出力のそれぞれについて、過去所定時間内の加速度信号(加速度変化)に含まれる高域周波数成分並びに低域周波数成分のエネルギーが抽出されることとなる。換言すれば、左側高周波エネルギー抽出系(6L,7L,8L)並びに左側低周波エネルギー抽出系(9L,10L,11L)により、左側加速度センサ1Lで検出された加速度の過去所定時間内における変化に含まれる周波数成分が分析される。同様にして、右側高周波エネルギー抽出系(6R,7R,8R)並びに右側低周波エネルギー抽出系(9R,10R,11R)により、右側加速度センサ1Rで検出された加速度の過去所定時間内における変化に含まれる周波数成分が分析される。なお、当業者であれば容易に理解されるであろうが、絶対値変換器7L,7R,10L,10Rの機能、並びに、区間積分器8L,8R,11L,11Rの機能についても、マイクロコンピュータにてソフトウェア的に実現することができる。
【0092】そして、このようにして区間積分器8L、8Rから出力される高域周波数成分エネルギーは、側面変形有無判定部12の該当する入力端子fHL,fHRへと供給され、同様にして区間積分器11L,11Rから出力される低域周波数成分エネルギーは側面変形有無判定部12の該当する入力端子fLL,fLRへと供給される。
【0093】なお、上述の回路構成において、バンドパスフィルタ(BPF)6L,6Rの高域カット側(340Hz)が、アンチエリアシングフィルタ2L,2Rのカットオフと同一ならば、バンドパスフィルタ(BPF)6L,6Rの代わりにハイパスフィルタ(HPF)を使用して低域カットのみを行うようにすれば、ソフト処理の負担を軽減することもできる。ハイパスフィルタ(HPF)の機能は、例えば、前方もしくは後方差分やシンプソンの微分定理等の各種微分系演算アルゴリズムでも代用することができる。また、特に、低域周波数成分の抽出に絶対値変換器10L,10Rを使用しない場合には、判定したい衝突方向の低域成分にのみ着目することができる。
【0094】図6に示されるように、上述の回路構成において、加速度信号の低域周波数成分を抽出するローパスフィルタ9L,9R並びに高域周波数成分を抽出するバンドパスフィルタ6L,6Rの周波数特性は例えばつぎのように設定することができる。
【0095】すなわち、低域周波数成分としては、例えばDCから160Hz(−3dB)程度の範囲の帯域の周波数成分を使用することができる。もっとも、本発明者等によりある車両における実験で確認されたところでは、本発明の側面変形判定において、低域周波数成分として重要なことは、車体側面の変形と特に強い相関のあるDC付近の周波数成分、例えば、10Hz(−3dB)程度の周波数成分を確実に含んでいることであることが判明している。
【0096】してみると、低域周波数成分として重要なことは、少なくともDC付近の周波数成分が含まれていることにあり、DC付近の周波数成分が含まれている限りにおいては、その上限周波数をどこまでにするかについてはさほど重要な要件ではないと考えられる。なお、本発明者等による実験において、低域周波数成分の上限を高めの周波数である160Hz(−3dB)としているのは、フィルタリングにより帯域抽出する場合に、フィルタの位相遅れにより応答速度が遅くならないようにするための配慮に過ぎない。
【0097】同様にして、高域周波数成分としては、160Hz(−3dB)から340Hz(−3dB)程度の範囲の帯域の周波数成分を使用することができる。もっとも、本発明者等によりある車両における実験で確認されたところでは、本発明の側面変形判定において、高域周波数成分として重要なことは、低域周波数成分として抽出されるDC付近の周波数成分、例えば10Hz程度の周波数成分を含んでいないことであることが判明している。
【0098】なお、本発明者等による実験において、高域周波数成分の下限を160Hzとしているのは、10Hz程度の周波数成分を除外するにはこれで十分だという理由に過ぎない。
【0099】してみると、高域成分として重要なことは、少なくともDC付近の周波数成分、好ましくは、10Hz程度までの周波数成分を含んでいないことであり、それらの周波数成分が含まれていない限りにおいては、その上限を制限する積極的な理由は存在しない。
【0100】もっとも、本発明者等の実験においては、高域周波数成分に340Hzと言う上限を設けているが、これは加速度センサを内蔵するユニットが取り付けられる相手方部材(サイドシル等)やその取付ブラケットの固有振動数をカット(共振による不確定要素のカット)したり、加速度データをA/D変換して離散化する際に、エリアシング誤差による影響を排除する必要があるからに過ぎない。
【0101】実際、車体側面の変形を伴う衝突の場合には、1KHz以上にまで高域周波数成分は発生(発散)する以上、上述の共振カット及びエリアシング誤差排除の必要がないのであれば、高域周波数成分の上限を340Hzに制限する積極的な理由は存在しない。
【0102】なお、高域周波数成分の上限を340Hzよりも高く設定することができるのであれば、それにつれて高域周波数成分の下限も160Hzよりも高く設定することができる。このように、高域周波数成分は側面変形判定の観点からはかなり広い範囲で自由に周波数設定することができるが、実際には、センサ取付上の問題等のために上限側に制限があり、それにつれて下限側の周波数も制限されることとなる。
【0103】次に、本発明の要部である側面変形有無判定部12の機能について説明する。側面変形有無判定部12は、車両左側ユニットLUに含まれた加速度センサ1Lで検出される加速度信号の周波数分析結果に相当する周波数成分(fLL,fHL)並びに車両右側ユニットRUに含まれる加速度センサ1Rで検出された加速度信号の周波数分析結果に相当する周波数成分(fLR,fHR)に基づいて、車体右側側面もしくは車体左側側面に変形(イントルージョン等)が生じたか否かを判定するものである。この判定は、マイクロコンピュータによりソフトウェア的に実現することができる。
【0104】より具体的には、側面変形有無判定部12は、区間積分器8Lから得られる左側高域周波数成分エネルギ(fHL)と、区間積分器11Lから得られる左側低域周波数成分エネルギ(fLL)と、区間積分器8Rから得られる右側高域周波数成分エネルギ(fHR)と、区間積分器11Rから得られる右側低域周波数成分エネルギ(fHR)とに基づいて、車体の右側面もしくは左側面に変形(イントルージョン)が生じたか否かを判定する。
【0105】先に説明したように、この判定のアルゴリズムは、本発明者等が発見した周波数成分分布の相関(図1並びに図2参照)、即ちイントルージョンを伴う側面衝突の場合とイントルージョンを伴わない車両移動のみからなる側面衝突の場合とでは、加速度センサで検出される加速度信号の所定時間内に含まれる周波数成分分布に固有の特徴がみられるとする相関、を利用して行われる。
【0106】具体的な判定のアルゴリズムとしては、どの加速度センサを使用するかにより、(1)衝突側側面に対応して取付けられた加速度センサのみを用いる場合(シングルポイントタイプ)、(2)衝突側側面に対応して取付けられた加速度センサと衝突側側面と反対側の側面に対応して取付けられた加速度センサの双方を使用する場合(マルチプルポイントタイプ1)、(3)衝突側側面に対応して取付けられた加速度センサといずれの側面にも属さない位置(例えば、車幅方向の中央のセンタトンネルの上部)に取付けられた加速度センサの出力を用いる場合(マルチプルポイントタイプ2)の3通りが考えられる。なお、便宜上、以下の説明では、衝突側の側面とは車体の左側の側面とする。
【0107】衝突側の側面に取付けられた加速度センサの出力のみを用いて行われる側面変形判定(シングルポイントタイプ)は、前記の分析により得られた周波数成分(fLL,fHL)を所定の判定論理に照らすことにより行われる。
【0108】判定論理の一例としては、前記分析により得られた周波数成分における高域周波数成分(fHL)に着目したものが挙げられる。この判定論理では、高域周波数成分(fHL)が基準値よりも多い場合には車体側面に変形が生じているものと判定され、また高域周波数成分(fHL)が基準値よりも少ない場合には車体側面に変形が生じていないものと判定される。
【0109】判定論理の他の一例としては、前記分析により得られた周波数成分における高域周波成分(fHL)と、低域周波成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)との双方に着目したものが挙げられる。この判定論理では、両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、両者の比(fHL/fLL、もしくは、fHL/(fLL+fHL))が基準値よりも大きい場合には車体側面に変形が生じているものと判定され、また両者の比(fHL/fLL、もしくは、fHL/(fLL+fHL))が基準値よりも小さい場合には車体側面に変形が生じていないものと判定される。
【0110】これらの判定論理は、図1(I)(a)と図1(II)(a´)との比較から明らかなように、衝突による車体側面の変形と連動して変位する車体部位で検出される加速度信号の所定時間内に含まれる周波数成分に着目すると、イントルージョンを伴わない側面衝突の場合に比べ、イントルージョンを伴う側面衝突の場合の方が、高域周波数成分の含有量が多いと言う知見に基づくものである。なお、フローチャートによる図示は省略するが、これらの判定論理に必要とされるデジタルコンパレータ機能は、当業者であれば、マイクロコンピュータのソフトウェアにより容易に実現できるはずである。
【0111】次に、車体の左右両側面のそれぞれに対応して取付けられた2個の加速度センサの双方を用いて行われる側面変形判定(マルチプルポイントタイプ1)は、前記の分析により得られた左側系並びに右側系の両周波数成分(fLL,fHL、並びに、fLR,fHR)を所定の判定論理に照らすことにより行われる。
【0112】このような判定論理の一つ(以下、第1の判定論理と言う)としては、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分(fHL)と、衝突側と反対側の加速度センサで検出された加速度信号に含まれる低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)とに着目するものを挙げることができる。この第1の判定論理では、上記着目される両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、衝突側の高域周波数成分(fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR/fHL、又は、(fLR+fHR)/fHL)が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定され、また衝突側の高域周波数成分(fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR/fHL、又は、(fLR+fHR)/fHL)が、基準値よりも大きい場合には、車体側面に変形の生じていないものと判定される。
【0113】このような判定は、図1(I)(a)と図1R>1(II)(a´)との比較から明らかなように、衝突側の側面の加速度センサから求められた高域周波数成分に着目すると、その含有量はイントルージョンを伴わない側面衝突の場合(I)よりもイントルージョンを伴う側面衝突の場合(II)の方が多いいことに加え、図1(I)(c)と図1(II)(c´)との比較から明らかなように、衝突側と反対側の側面に取付けられた加速度センサの低域周波数成分に着目すると、その含有量はイントルージョンを伴わない側面衝突の場合よりもイントルージョンを伴う側面衝突の場合の方が少ないと言う知見に基づくものである。
【0114】このように衝突側の高域周波数成分(fHL)と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)とに着目した判定は、より具体的には、それら成分エネルギをそれぞれ直交2軸とする2軸平面上の特定領域との比較により、或いは、それら周波数エネルギー成分の比(fLR/fHL、又は、(fLR+fHR)/fHL)を特定の閾値と比較するにより行うことができる。なお、フローチャートによる図示を省略するが、これらの比較処理は、当業者であれば、マイクロコンピュータのソフトウェアにより容易に実現できるはずである。
【0115】反対側側面における低域周波数成分エネルギ(fLR)をX軸、衝突側側面における高域周波数成分エネルギ(fHL)をY軸とする2軸平面上において、衝突側側面に変形が生じたか否かを判定するようにした一例が図7に示されている。
【0116】同図において、aは車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こしたような場合における2軸平面上の値を示す曲線、bはオフセット側面衝突を起こした場合における2軸平面上の値を示す曲線、cは斜め側面衝突を起こした場合における2軸平面上の値を示す曲線、dは側面衝突を起こした場合における2軸平面上の値を示す曲線、eは側面に変形の有無を判定するために選ばれた所定傾きの閾値角度直線である。
【0117】そして、2軸平面上の座標値がX軸と閾値角度直線eとに挟まれる図中斜線で縁取られた領域に存在する場合には、衝突側側面には変形(イントルージョン等)が生じないものと判定される。これに対して、2軸平面上の値が、Y軸と閾値直線eとで挟まれる領域に存在する場合には、衝突側側面には変形(イントールジョン等)が生ずるものと判定される。
【0118】このような前提の基に各曲線a,b,c,dを観察すると、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こした場合には、曲線aが斜線で囲まれた領域に存在することから、衝突側側面には変形(イントルージョン等)が生じないものと判定される。また、オフセット側面衝突の場合にも、曲線bが斜線で囲まれた領域に存在することから、衝突側側面には変形が生じないものと判定される。これに対して、斜め側面衝突を起こしたような場合には、曲線cが斜線で囲まれた領域に存在しないことから、衝突側側面に変形(イントルージョン等)が生ずるものと判定される。また、車両側面衝突の場合にも、曲線dが斜線で囲まれた領域には存在しないことから、衝突側側面に変形が生ずるものと判定される。
【0119】このように、車両の左右両側の2個の加速度センサから何らかの信号が得られた場合、衝突側の高域周波数成分エネルギ(fHL)と反対側の低域周波数成分エネルギ(fLR)とをこの2軸平面上にプロットして、その座標値が閾値角度直線eを境にしてどちらの領域に存在するかを確認することにより、その衝撃に伴い衝突側側面に変形の有無を的確に判定することができるのである。
【0120】次に、前述した図7の2軸平面を閾値角度直線にて領域分けした例を、図8を参照して、周波数成分比/時間軸・座標上で説明する。図7の2軸平面の閾値角度直線eにての領域分けは、図8においては、衝突側高域周波数成分エネルギ(fHL)と反対側低域周波数成分エネルギ(fLR)との比(fLR/fHL)を閾値直線eと比較することに相当する。
【0121】尚、同図において、aは車両が横移動して縁石斜め跳ね返りを起こしたり、縁石側面衝突を起こした場合の値を示す曲線、bはオフセット側面衝突を起こした場合の値を示す曲線、cは斜め側面衝突を起こした場合の値を示す曲線、dは側面衝突を起こした場合の値を示す曲線、eは衝突側側面に変形の有無を判定するための閾値直線である。そして、座標値がこの閾値直線eよりも上側の領域に存在する場合、衝突側側面には変形が生じていないと判定される。
【0122】このような前提の基に各曲線a,b,c,dを観察すると、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こしたような場合には、曲線aが閾値直線eよりも上側の領域に存在することから、衝突側側面には何等変形(イントルージョン等)が生じないと判定される。
【0123】また、車両がオフセット側面衝突を起こしたような場合には、衝突直後の僅かの期間(10〜20ms)に限り曲線bは閾値直線eよりも下側に存在するものの、それを過ぎた後は閾値曲線eよりも上側に存在する。そのため、衝突直後僅かの時間で、衝突側側面に変形の生じないことが判定される。
【0124】これに対して、車両が斜め側面衝突を起こしたような場合には曲線cが閾値直線eよりも下側の領域に存在することから、衝突側側面に変形(イントルージョン等)が生じているものと判定される。
【0125】更に、車両が側面衝突を起こしたような場合にも、曲線dが比較的長期の期間(40〜50ms)の間、閾値直線eよりも下側の領域に存在することから、衝突側側面に変形が生ずるものと判定される。
【0126】このように、それら二つの周波数成分エネルギの比の時間的推移を追うことにより、当該衝撃により衝突側側面に変形(イントルージョン等)の有無を的確に判定することができるのである。
【0127】図9並びに図10には、図5(b)に示される衝突側の側面の点P1に取り付けられた加速度センサと図5(b)に示されるその反対側の点P3に取り付けられた加速度センサとを用いて実際に判定を行なった結果が示されている。図9には側面変形を伴う衝突を判定した場合の結果が、また図10には側面変形を伴わない衝突を判定した場合の結果が示されている。
【0128】図9並びに図10において、aは衝突側の側面における高域周波数成分エネルギ(fHL)、bは反対側の側面における低域周波数成分エネルギ(fLR)、cはそれら2つの周波数成分エネルギの比(fLR/fHL)、dは側面変形の有無を判定するためのしきい値直線を示している。
【0129】図9に示されるように、側面変形を伴う衝突の場合には、曲線cに示される両者の比(fLR/fHL)は、直線dに示されるしきい値TH1よりも十分に低い値に維持されており、これにより側面変形を伴う衝突である旨の判定が行われる。
【0130】これに対して、図10に示されるように、側面変形を伴わない衝突の場合には、曲線cに示される両者の比(fLR/fHL)は衝突直後に急峻に立ち上がり、ただちに直線dに示されるしきい値TH1を越えるためこれに基づき側面変形を伴わない衝突である旨の判定が行われる。
【0131】図10において丸で囲まれたA部に示されるように、衝突初期の2つの周波数成分エネルギ(fHL,fLR)が未だ小さい時、曲線cに示される両者の比(fLR/fHL)は不安定となり、直線dに示されるしきい値TH1を越えない。この問題は加速度に基づいて演算される何らかの量(例えば周波数成分エネルギや区間積分等)が既定値以上になるまで判定を行わない手法や、一方の周波数成分エネルギに予め設定した定数を加えることで比を安定させる手法で簡単に回避することができる。
【0132】次に、車両の左右両側のそれぞれに取付けられた2個の加速度センサの双方の出力を用いて、衝突側側面に変形の有無を判定するための判定論理の他の一つ(以下、第2の判定論理と言う)について説明する。
【0133】この第2の判定論理では、衝突側の加速度センサで検出された加速度信号に含まれる低域周波数成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)と、衝突側と反対側の加速度センサで検出された加速度信号に含まれる低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)とのそれぞれに着目される。この第2の判定論理では、上記着目される両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、衝突側の低域周波数成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR(又は、fLR+fHR)/fLL(又は、fLL+fHL))が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定され、また衝突側の低域周波数成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR(又は、fLR+fHR)/fLL(又は、fLL+fHL))が、基準値よりも大きい場合、もしくは両周波数成分がほぼ等しい場合(fLR(又は、fLR+fHR)≒fLL(又は、fLL+fHL))には、車体側面に変形が生じていないものと判定される。
【0134】このような判定は、図1(I)(a),(c)と図1(II)(a´),(c´)との比較から明らかなように、両加速度センサ出力の低域周波数成分エネルギーに着目すると、イントルージョンを伴う側面衝突の場合(II)には、衝突側に比べ反対側の低域周波数成分が大きく減衰するするのに対し、イントルージョンを伴わない車両移動のみによる側面衝突の場合(I)には、衝突側の低域周波数成分に対して反対側の低域周波数成分はほとんど減衰しないと言う知見に基づくものである。
【0135】次に、車両両側のそれぞれに取付けられた2個の加速度センサの双方の出力を用いて、衝突側側面に変形の有無を判定するための判定論理のさらに他の一つ(以下、第3の判定論理と言う)について説明する。
【0136】この第3の判定論理では、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分(fHL)と、反対側の加速度センサで検出された加速度信号に含まれる高域周波数成分(fHR)とのそれぞれに着目される。この第3の判定論理では、上記着目される両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、衝突側の高域周波数成分(fHL)に対する、衝突側と反対側の高域周波数成分(fHR)の比(fHR/fHL)が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定され、また衝突側の高域周波数成分(fHL)に対する、反対側の高域周波数成分(fHR)の比(fHR/fHL)が、基準値よりも大きい場合もしくは両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定される。
【0137】このような判定は、図1(I)(a),(c)と図1(II)(a´),(c´)との比較から明らかなように、両加速度センサ出力の高域周波数成分エネルギーに着目すると、イントルージョンを伴う側面衝突の場合には衝突側に比べ反対側の高域周波数成分が大きく減衰するするのに対し、イントルージョンを伴わない車両移動のみによる側面衝突の場合には、衝突側の高域周波数成分に比べて反対側の高域周波数成分はほとんど減衰しないと言う知見に基づくものである。
【0138】以上説明したように、車両両側のそれぞれに取付けられた加速度センサの双方を利用して、第1乃至第3の判定論理のいずれかを適用することにより、衝突側側面の変形(イントルージョン等)有無を的確に判定することができる。
【0139】ここで、図1並びに図2に示される相関を再度検討すると、イントルージョンを伴う側面衝突の場合とイントルージョンを伴わない側面衝突の場合とで周波数成分分布に相違が生ずるのは、衝突側側面のセンサ取付け部位と反対側側面のセンサ取付け部位とが振動系として実質的に断絶されていることに起因すると推定される。してみれば、反対側とされる加速度検出部位としては、衝突側センサ取付け部位と振動系的に断絶されていれば足り、それが断絶されている限り、車幅方向における両側壁の間の任意の部位を選択できるはずである。このことは、車体中央部に対応する周波数成分分布を示す図1(I)(b),図1(II)(b´)と車体反対側側面に対応する周波数分布を示す図1(I)(c),図1R>1(II)(c´)とがほぼ同一の波形を有することからも明らかである。
【0140】このような観点からすれば、今まで説明してきた第1乃至第3の判定論理における『反対側の加速度センサ』は、車両中央(例えば図5(b)に示されるセンタートンネル20内の点P2)に取付けられた加速度センサと置き換えることができる(マルチポイントタイプ2)。
【0141】すなわち、このような置き換えが行われた第1の判定論理は、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分と、車体中央部の加速度センサで検出された加速度信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。ここで、比較手法の一例では、衝突側の高域周波数成分に対する、車体中央部側の低域周波数もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定し、かつ衝突側の高域周波数成分に対する、車体中央部側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が基準値よりも大きい場合には、車体側面に変形の生じていないものと判定するものである。
【0142】同様な置き換えが行われた第2の判定論理は、衝突側の加速度センサで検出された加速度信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、車体中央部の加速度センサで検出された加速度信号の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。ここで、比較手法の一例では、衝突側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、車体中央部側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には車体側面に変形が生じているものと判定し、かつ衝突側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、車体中央部側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも大きい場合、もしくは、両周波数成分がほぼ等しい場合には車体側面に変形が生じていないものと判定するものである。
【0143】同様な置き換えが行われた第3の判定論理は、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分と車体中央部の加速度センサで検出された加速度信号に含まれる高域周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。ここで、比較手法の一例では、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定し、かつ、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分のの比が基準値よりも大きい場合、もしくは、両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定するものである。
【0144】そして、これらの置き換えが行われた判定論理によれば、車体の左右両側面の変形を判定すべく、2個の加速度センサを車体の中心軸線Xを挟んで左右対称的に配置した場合に、これらと対比されるべき非変形側の加速度センサが共通の1個で済み、これを従前からセンタトンネル20上に配置されている前方エアバッグ起動用の加速度センサと共用すれば、側面変形不感応センサのために別途加速度センサを備える必要がない。もっとも、この場合には、車両中央ユニット内には、少なくとも車両前後方向と車幅方向の2つの方向を検出できる1つの加速度センサ、若しくは、それぞれの方向軸に1つずつ加速度センサが必要とされるであろう。
【0145】ところで、車両衝突側の加速度センサと車両中央部の加速度センサとを使用する場合のように、車両中心軸線Xに対して非対称に配置された2個の加速度センサを使用して本発明を実施する場合には、衝突により車両が回転する影響を考慮することが好ましい。
【0146】図5(b)に示されるように、車体中心軸線Xに対して対称的な車両両側の2点(P1とP3)に取り付けられた2個の加速度センサを用いる場合と、車体の衝突側の側面の点P1と車幅方向中央の重心Gよりも僅かに後方の点P2に取り付けられた(車体中心軸線に対して非対称に配置された)2個の加速度センサを用いる場合とで、車体に回転が生ずる場合にどのような影響が現れるかを理論的に比較検討する。
【0147】今仮に、側面衝突により矢印Aに示されるように、車体が反時計回りに回転したものと想定する。この場合、回転に伴なう加速度Fは、点P1と点P3とに関しては重心Gからの距離が等しいために等しくなり、その車幅方向の成分F1とF3とは等しくなる。すなわち、この場合には、車両の回転が点P1と点P3とに取り付けられた加速度センサに与える影響は均等なものとなる。
【0148】これに対して、点P1に生ずる加速度による車幅方向成分F1と点P2に生ずる加速度F2とを比較すると、重心Gからの距離が異なることから、F1よりもF2の方が小さいことが判る。すなわち、この場合、点P1に取り付けられた加速度センサと点P2に取り付けられた加速度センサとでは、回転に伴う影響が均等には生じないことが判る。
【0149】実際、このことは、図3(I)並びに図3(II)に示されるように、車体中央部並びに車体反対側側面に対応して取り付けられた加速度センサの出力の周波数分布にも現れている。
【0150】車体前部右側面にオフセット側面衝突したことにより車体前部が衝突側と反対側に大きく移動する(振られる)ように車体が反時計回りに回転した場合における各加速度センサ(衝突側、中央部、反対側)の出力の周波数成分分布が図3(I)に示されている。また、車体後部右側面にオフセット側面衝突したことにより車体後部が衝突側と反対側に大きく移動する(振られる)ように車体が時計回りに回転した場合における各加速度センサ(衝突側、中央部、反対側)の出力の周波数成分分布が図3(II)に示されている。なお、図3(I)と図3(II)に示されるいずれのオフセット側面衝突の周波数分布も、衝突直後の僅かな変形が収まった時間後の分布を示している。
【0151】それら2つの図(図3(I),(II))に示される実験結果の比較から明らかなように、車体衝突側と車体反対側のように車両重心からほぼ等距離の位置に取り付けられた2個の加速度センサの出力には、車両の回転による影響がほぼ均等に現れていることが認められる。これに対して、車体衝突側と車体中央部のように車両重心からの距離が異なる位置に取り付けられた2個の加速度センサの出力には、車両の回転による影響が均等に現れていないことが認められる。より詳細に観察すると、図3(I),(II)にハッチングで示されるように、車両中央部に取り付けられた加速度センサの出力信号に含まれる低域周波数成分は、回転態様の相違に応じて大きく変動することが認められる。なお、この場合であっても、高域周波数成分については、回転態様の相違に拘わらず、ほとんど変動しないことは注意に値する。
【0152】図5(b)を参照して行った理論的検討、並びに、図3(I),(II)に示された実験結果によれば、側面衝突による車体回転をも考慮するのであれば、比較対照されるべき2個の加速度センサとしては、車体衝突側の加速度センサ(例えば、図5(b)の点P1)と車体反対側の加速度センサ(例えば、図5(b)の点P3)、すなわち車体中心軸線に対して対称的に配置された2個の加速度センサ、を採用することが好ましいことが理解される。
【0153】もっとも、図5(b)の点P3にセンサユニット取付スペースが存在しなかったり、或いは、衝突検知対象となる側面が車体の片方の側面だけであることから点P3にセンサユニットが存在しないこと等から、比較対照されるべき2個の加速度センサとして、車体衝突側の加速度センサ(例えば、図5(b)の点P1)と車体中央部の加速度センサ(例えば、図5(b)の点P2)、すなわち車体中心軸線に対して非対称的に配置された2個の加速度センサ、を採用せざるを得ない場合も存在するであろう。このような場合には、先に述べた3つの判定論理の中で最も車体回転の影響を受けにくい第3の判定論理を採用することが好ましい。すなわち、この第3の判定論理が採用された車体側面変形判定は、衝突側の加速度センサ(例えば、図5(b)のP1点)で検出された加速度信号に含まれる高域周波数成分と車体中央部の加速度センサ(例えば、図5(b)のP2点)で検出された加速度信号の高域周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。比較手法の一例としては、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定し、かつ、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分の比が基準値よりも大きい場合、もしくは、両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定するものである。
【0154】このような判定は、図1(I),図1(II),図3(I),図3(II)の比較から明らかなように、両加速度センサ出力に含まれる所定時間内の高域周波数成分エネルギに着目すると、イントルージョンを伴う時間帯の場合には、衝突側に比べ車体中央部の高域周波数成分エネルギは車体回転の有無に拘わらず大きく減衰するのに対し、イントルージョンを伴わない車両移動のみの時間帯の場合には、衝突側に比べ車両中央部の高域周波数成分エネルギは車体回転の有無に拘わらずほとんど減衰しないという相関を逆に利用したものである。
【0155】上述の車体衝突側並びに車体中央部の加速度センサ(非対称配置)を使用しかつ第3の判定論理(高域相互比較)を適用する変形有無判定手法は、車体が回転する場合のみならず、図3(III)に示されるように、車両の構造が強化された場合(剛性の高い車体の場合)にも都合がよいことが知見されている。車両の構造が強化されると変形量が減り車両全体の移動量が増えていく傾向がある。このため、変形の生じている時間帯の低域周波数成分は、図3(III)にハッチングで示されるように、車体衝突側、車体中央部、車体反対側で差が小さくなり、変形が生じている特徴は高域周波数成分にしか現れなくなる。このような場合にあっても、上述の高域相互比較を行う変形有無判定手法によれば、変形有無で差のつきづらくなった低域周波数成分を判定要素としないため、信頼性の高い判定結果を得ることができる。
【0156】なお、上述の第1〜第3判定論理における2つの周波数成分の比の比較のためには、先に図7を参照して説明した2軸平面を閾値角度直線にて領域分けする手法や図8を参照して説明した両者の比をしきい値直線と比較するものに限らず、種々の手法を採用することができる。その他の手法の例としては、衝突側高周波域成分エネルギと反対側低周波域成分エネルギの関数を基準値と比較することに相当する閾値曲線によって領域分けする手法や、衝突側高周波域成分エネルギの基準値比較と反対側低周波域成分エネルギの閾値比較を双方で行い、結果を論理演算で構成したいわゆる四角型の領域分け手法等を挙げることができる。
【0157】次に、図4に戻って、側面変形判定部12の左側判定出力S1L並びに右側判定出力S1Rが、起動要否判定部13においてどのように利用されるかの一例を説明する。
【0158】側面変形有無判定部12から出力される左右の判定出力S1L並びにS1Rはそれぞれ例えば2値信号であって、“1”は側面変形ありを、また“0”は側面変形なしを示している。
【0159】一方、起動要否判定部13は、従来一般的な構成のものを使用することができ、すなわち先に説明したように、離散値加速度データGsl(k)並びにGsr(k)を、それぞれ1若しくは2以上の積分時間をもって区間積分することにより得られた速度変化量に基づいて、各種の衝突態様を判定し、それが側方エアバッグの起動を必要とするものか否かを判定するものである。このような起動要否判定部の具体的な構成については、公知文献に基づき当業者において容易に理解されるであろうから詳細な説明は省略する。尚、S2L,S2Rは、それぞれ左右の側方エアバッグ起動信号である。
【0160】そして、特に、この起動要否判定部13においては、側面変形有無判定部12からの判定出力S1L並びにS1Rが側面変形なしを示す場合には、これを縁石側面衝突やオフセット側面衝突等の乗員室側面にイントルージョンがない側面衝突であるとみなして、起動要否判定部13内部の判定閾値を切り替えたり、積分時間や判定論理の構成自体を切り替えたりする。これにより、イントルージョンのない車両横移動となる衝突態様にあることを考慮に入れつつ、乗員傷害危険度に合わせて、側方エアバッグの起動要否を判定することができる。
【0161】そのため、この側方エアバッグ起動制御装置100にあっては、乗員に影響のない低速縁石側面衝突や低速オフセット側面衝突に起因して衝突直後の短時間に急峻な速度変化が観察されたとしても、側面変形有無判定部12から側面変形なしを示す判定出力が得られることにより、側方エアバッグシステムの不要な作動を未然に防止することができる。また、側面変形の生じない移動のみとなる衝突態様であっても、乗員が傷害を受ける虞がある中高速縁石側面衝突や中高速オフセット側面衝突の場合にあっては、そのような衝突態様に合わせた適正なエアバッグ起動判定手法を採用することにより、乗員を傷害から確実に保護することができる。
【0162】なお、以上の説明からも明らかなように、本願発明の要旨とするところは、加速度信号に含まれる過去所定時間内の周波数成分を分析することにある。この分析手段として、図4に示される実施例の場合には、いわゆるフィルタリングによる周波数抽出手法が採用されているが、これは単に周波数成分分析手法の一例に過ぎないものとと理解されるべきである。このような周波数分析手法としては、フィルタリングによる周波数抽出のみならず、いわゆる時間窓移動FFT等のように公知の種々の手法が適用できることは当業者であれば当然に理解されるはずである。
【0163】また、本願に含まれる発明の中で、複数の周波数成分分析結果に基づいて側面変形の有無を判定するものにあっては、原加速度信号若しくはそれを処理した信号のいずれかを演算処理のために一カ所に伝送することが必要となる。この伝送手段として、図4に示される実施例の場合には、加速度信号のデジタル伝送技術が採用されているが、これは単に伝送手法の一例に過ぎないものと理解されるべきである。このような伝送手法としては、加速度信号のアナログ伝送としたり、個々の側面ユニットにて演算した結果を一カ所に伝送したり、あるいはその伝送媒体として光ファイバを使用したり、と言ったような変形は当業者であれば容易に理解されるはずである。
【0164】さらに、以上の実施の形態では、衝突側側面の加速度センサの出力と比較されるべきものは、反対側の側面の加速度センサ若しくは車体中央付近の加速度センサのいずれか一方のセンサ出力としているが、これを双方のセンサ出力と比較するように構成すれば、より一層信頼性の高い判定論理を構成できることは言うまでもないことである。すなわち、衝突側の側面の加速度センサ(A)からの周波数分析結果(演算値)に対して、車両中央付近の加速度センサ(B)と衝突側の側面と反対側の側面の加速度センサ(C)の周波数分析結果を双方個別に対応させることにより、例えば、衝突側の側面の加速度センサ(A)と車両中央付近の加速度センサ(B)の周波数分析結果の組み合わせによる判断結果(J1)と、衝突側の側面の加速度センサ(A)と衝突側の側面と反対側の側面の加速度センサ(C)の周波数分析結果の組み合わせによる判断結果(J2)とを、OR論理(J1+J2)若しくはAND論理(J1*J2)することにより、一層信頼性の高い制御を実現することができる。
【0165】[第2実施形態]次に、本発明の車体側面に変形の有無を判定する装置の更に他の実施の一形態の構成を図11のブロック図を参照して説明する。
【0166】先ず、この車体側面変形有無判定装置の基本的な構成を概略的に説明する。この車体側面変形有無判定装置は、衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニット(U1)と、衝突による車体の前記一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2加速度検出ユニット(U2)と、を具備している。第1加速度検出ユニット(U1)には、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定の閾値と比較して2値化する2値化手段とが含まれており、第2加速度検出ユニット(U2)には、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定の閾値と比較して2値化する2値化手段とが含まれている。この車体側面変形有無判定装置には、さらに、前記第1加速度検出ユニット(U1)に含まれる2値化手段から出力される2値化出力信号と、前記第2加速度検出ユニット(U2)に含まれる2値化手段から出力される2値化出力信号とに基づいて、車体側面の変形有無を判定する判定手段(J)を具備している。なお、以上の各ユニットU1,U2並びに判定手段Jは機能として存在するものであり、以下の図面では図示されてはいない。
【0167】変形有無を判定すべき車体側面を例えば運転席側の車体側面のみに限定するような片面判定の場合、上述した第1加速度検出ユニット(U1)並びに第2加速度検出ユニット(U2)の機能は、各々それ専用の機能を有するユニットにより実現することができる。これに対して、変形有無を判定すべき車体側面を車体の左右両側面とするような両面判定の場合には、上述した第1加速度検出ユニット(U1)並びに第2加速度検出ユニット(U2)の機能は、以下に説明するように、機能並びに配置の異なる複数のユニットを使用した様々な態様で実現することができる。
【0168】図11並びに図12に示される車体構造図には、代表的なユニット配置の一例がそれぞれ示されている。それらの図において、RUは車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニット、LUは車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニット、CUは車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットである。このように、ユニット配置としては、図11に示される3個構成(RU,LU,CU)のものと、図12に示される2個構成(RU,LU)のものとが少なくとも考えられる。
【0169】なお、『衝突による車体側面の変形と連動して変位する車体部位』、並びに、『車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位』の意味するところについて、第1の実施形態で説明したとおりである。車両中央ユニットCUは、以上説明した『衝突による車体側面の変形と連動して変位する車体部位』以外の車体部位であればどこどもよいのであるが、車両左側ユニットLU並びに車両右側ユニットRUに関する位置関係が対称的になることを考慮した場合、図5(b)に示されるセンタートンネル20上等のように、車体の前後方向へ延びる中心軸線X上の適当な部位に取り付けることが好ましいであろう。
【0170】次に、図11に示される3個構成のユニット配置において、各ユニットRU,LU,CUがどのように機能するかを概略的に説明する。
【0171】先に説明したように、本発明を構成するためには、衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニット(U1)と、衝突による車体の前記一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2加速度検出ユニット(U2)と、前記第1加速度検出ユニット(U1)に含まれる2値化手段から出力される2値化出力信号と、前記第2加速度検出ユニット(U2)に含まれる2値化手段から出力される2値化出力信号とに基づいて、車体側面の変形有無を判定する判定手段(J)とが必要とされる。なお、ここで、U1,U2,Jは、機能として存在するもので、具体的に図示されるものではない。
【0172】これらの必須構成要素(U1,U2,J)の中で、第1加速度検出ユニット(U1)の有する機能については、右側面衝突に関しては車両右側ユニットRUにより、また左側面衝突に関しては車両左側ユニットLUにより実現される。これに対して、第2加速度検出ユニット(U2)並びに判定手段(J)の機能がいずれのユニットにて実現されるかについては、様々な手法が考えられる。
【0173】第1の手法では、後に図14を参照して詳細に説明するが、第2加速度検出ユニット(U2)並びに判定手段(J)の機能は、いずれも車両中央ユニットCUにより実現される。第2の手法では、後に図15を参照して詳細に説明するが、第2加速度検出ユニット(U2)の機能は、車両右側ユニットRUと車両左側ユニットLUの中で、衝突側と反対側に位置するユニットにより実現され、他方判定手段(J)の機能については、左右いずれの側の変形判定についても、車両中央ユニットCUにより実現される。
【0174】次に、図12に示される2個構成のユニット配置において、各ユニットRU,LUがどのように機能するかを概略的に説明する。この場合にも、第1加速度検出ユニット(U1)の有する機能については、右側面衝突に関しては車両右側ユニットRUにより、また左側面衝突に関しては車両左側ユニットLUにより実現される。これに対して、後に詳細に説明するが、第2加速度検出ユニット(U2)の機能は、車両右側ユニットRUと車両左側ユニットLUの中で、衝突側と反対側に位置するユニットにより実現され、他方判定手段(J)の機能については、右側の変形判定については車両右側ユニットRUにより、また左側の変形判定については車両左側ユニットLUにより実現される。
【0175】次に、判定手段(J)における車体側面の変形有無の判定は、第1加速度検出ユニット(U1)並びに第2加速度検出ユニット(U2)の取り扱う周波数成分に合わせた以下に述べる幾つかの判定論理に従って実現される。
【0176】第1の判定論理では、前記第1加速度検出ユニット(U1)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニット(U2)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)の2値化出力信号のオンタイミングとの、比較に基づいて、車体側面の変形有無が判定される。これは、図13(a)に示されるように、第2加速度検出ユニット(U2)で検出されるべき中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)をX軸、第1加速度検出ユニット(U1)で検出されるべき衝突側の高域周波数成分をY軸とする2軸平面上において両周波数成分で決まる座標の軌跡を観察すると、側面変形を伴う衝突の場合には、中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref2a)を越える時点よりも、衝突側の高域周波数成分がそのしきい値(Ref1a)を越える時点の方が早いのに対して、側面変形を伴わない衝突の場合には、衝突側の高域周波数成分がそのしきい値(Ref1a)を越える時点よりも、中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分がそのしきい値(Ref2a)を越える時点の方が、早いと言う知見に基づくものである。
【0177】第2の判定論理では、前記第1加速度検出ユニット(U1)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)の2値化出力信号のオンタイミングと、前記第2加速度検出ユニット(U2)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)の2値化出力信号のオンタイミングと、の比較に基づいて、車体側面に変形の有無が判定される。これは、図13(b)に示されるように、第2加速度検出ユニット(U2)で検出されるべき中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)をX軸、第1加速度検出ユニット(U1)で検出されるべき衝突側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)をY軸とする2軸平面上において両周波数成分で決まる座標の軌跡を観察すると、側面変形を伴う衝突の場合には、中央又は反対側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref2b)を越える時点よりも、衝突側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref1b)を越える時点の方が、早いのに対して、側面変形を伴わない衝突の場合には、衝突側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref1b)を越える時点よりも、中央又は反対側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref2b)を越える時点の方が早いと言う知見に基づくものである。
【0178】第3の判定論理では、前記第1加速度検出ユニット(U1)に含まれる加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニット(U2)に含まれる加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングとの比較に基づいて、車体側面に変形の有無が判定される。これは、図13(c)に示されるように、第2加速度検出ユニット(U2)で検出されるべき中央又は反対側の高域周波数成分をX軸、第1加速度検出ユニット(U1)で検出されるべき衝突側の高域周波数成分をY軸とする2軸平面上において両周波数成分で決まる座標の軌跡を観察すると、側面変形を伴う衝突の場合には、中央又は反対側の高域周波数成分がそのしきい値(Ref2c)を越える時点よりも、衝突側の高域周波数成分がそのしきい値(Ref1c)を越える時点の方が、早いのに対して、側面変形を伴わない衝突の場合には、衝突側の高域周波数成分がそのしきい値(Ref1c)を越える時点よりも、中央又は反対側の高域周波数成分がそのしきい値(Ref2c)を越える時点の方が、早いと言う知見に基づくものである。
【0179】次に、図14、図15、図16、並びに、図17にそれぞれ示される車体側面変形有無判定装置の具体的な4つの例を詳細に説明する。なお、上述の判定論理としては、図13(a)に示される第1の判定論理が採用されているが、これに代えて、図13(b)もしくは図13(c)に示される第2もしくは第3の判定論理を採用することもできる。
【0180】先ず最初に、図14に示される装置について説明する。この車体側面変形有無判定装置は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットCUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両中央ユニットCUに相当するように構成されている。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する右側面変形判定部RJと左側面変形判定部LJとが含まれている。
【0181】車両左側面ユニットLU並びに車両右側面ユニットRUは、加速度センサ101L,101R、アンチエリアシングフィルタ102L,102R、AD変換器103L,103R、ハイパスフィルタ104L,104R、絶対値変換器105L,105R、区間積分器106L,106R、及び、コンパレータ107L,107Rを含んでいる。
【0182】加速度センサ101L,101Rとしては、例えばピエゾ抵抗変化を利用する応力歪みゲージを半導体基板上に組込んだもの、静電容量型加速度センサ、圧電素子を用いた加速度センサなどを採用することができる。ここで必要な加速度の方向は主として車体側方であるが、センサそれ自体としては一つのセンサで二軸及び三軸の加速度を検出できるものを使用することもできる。
【0183】アンチエリアシングフィルタ102L,102Rは、AD変換に際する折り返し誤差を除去するために機能するものであり、種々の構成よりなるフィルタ機能を利用することができる。
【0184】AD変換器(A/D)103L,103Rは、アンチエリアシングフィルタ102L,102Rを介して供給される加速度センサ101L,101Rの出力をAD変換することによって左右の離散値加速度データGsl(k)、Gsr(k)に変換するものであり、種々の構成よりなるAD変換回路を採用することができる。
【0185】次いで、このようにして得られた左右の離散値加速度データGsl(k)、Gsr(k)は、それに続くハイパスフィルタ(HPF)104L,104R、絶対値変換器(ABS)105L,105R、区間積分器106L,106Rにより以下のように処理されることにより、左右の加速度センサ101L,101Rの検出加速度の高域周波数成分エネルギが求められる。
【0186】すなわち、左右のハイパスフィルタ(HPF)104L,104Rは、このようにして得られた離散値加速度データGsl(k),Gsr(k)を、例えばソフトウェア的に高域フィルタ処理することにより、加速度センサ101L,101Rの出力信号の高域周波数成分を抽出するものである。なお、上述の構成において、ハイパスフィルタ(HPF)104L,104Rとしては、例えば、前方もしくは後方差分やシンプソンの微分定理等の微分系演算アルゴリズムでも代用することができる。絶対値変換器(ABS)105L,105Rでは、ハイパスフィルタ(HPF)104L,104Rから得られる高域周波数成分をその絶対値に変換する。区間積分器106L,106Rでは、この絶対値変換された高域周波数成分を所定時間(例えば、5ms〜30ms程度)だけ区間積分する。これにより、左右の加速度センサ101L,101Rの過去所定時間内の出力信号に含まれる高域周波数成分エネルギが求められる。
【0187】次いで、区間積分器106L,106Rから得られる高域周波数成分エネルギは、その後段に配置されたコンパレータ(2値化手段に相当)107L,107Rにおいて所定の閾値Ref1と大小比較されて“1”若しくは“0”に2値化される。つまり、これらのコンパレータ107L,107Rは、左右の加速度センサ101L,101Rの過去所定時間内の出力中に含まれる高域周波数成分エネルギが所定値(Ref1)に達したか否かを判定することとなる。なお、絶対値変換器(ABS)105L,105R、区間積分器106L,106R、コンパレータ107L,107Rの機能についても、マイクロコンピュータにてソフトウェア的に容易に実現することができる。
【0188】一方、車両中央ユニットCUは、同様にして、加速度センサ101C、アンチエリアシングフィルタ102C、AD変換器(A/D)103C、ローパスフィルタ(LPF)104C、絶対値変換器(ABS)105C、区間積分器106C、及び、コンパレータ107Cを含んでいる。なお、これらの構成要素101C〜107Cの内容は、ローパスフィルタ(LPF)104Cを除き、先に説明した車両右側ユニットRU並びに車両左側ユニットLUのそれとほぼ同様である。
【0189】すなわち、加速度センサ101Cとしては、例えばピエゾ抵抗変化を利用する応力歪みゲージを半導体基板上に組込んだもの、静電容量型加速度センサ、圧電素子を用いた加速度センサなどを採用することができ、又ここで必要な加速度の方向は主として車体側方であるが、センサそれ自体としては一つのセンサで二軸及び三軸の加速度を検出できるものを使用することもできる。
【0190】アンチエリアシングフィルタ102Cは、AD変換に際する折り返し誤差を除去するために機能するものであり、種々の構成よりなるフィルタ機能を利用することができる。
【0191】AD変換器(A/D)103Cは、アンチエリアシングフィルタ102Cを介して供給される加速度センサ101Cの出力をAD変換することによって離散値加速度データGsc(k)に変換するものであり、種々の構成よりなるAD変換回路を採用することができる。
【0192】次いで、このようにして得られた離散値加速度データGsc(k)は、それに続くローパスフィルタ(LPF)104C、絶対値変換器(ABS)105C、区間積分器106Cにより以下のように処理され、中央の加速度センサ101Cの過去所定時間内の出力信号に含まれる低域周波数成分エネルギが求められる。
【0193】すなわち、ローパスフィルタ(LPF)104Cは、このようにして得られた離散値加速度データGsc(k)を、例えばソフトウェア的に低域フィルタ処理することにより、加速度センサ101Cの出力信号の低域周波数成分を抽出する。絶対値変換器(ABS)105Cでは、ローパスフィルタ(LPF)104Cから得られる低域周波数成分をその絶対値に変換する。区間積分器106Cでは、この絶対値変換された低域周波数成分を所定時間(例えば、5ms〜30ms程度)だけ区間積分する。これにより、中央の加速度センサ101Cの過去所定時間内の出力信号に含まれる低域周波数成分エネルギが求められる。
【0194】次いで、区間積分器106Cから得られる低域周波数成分エネルギは、その後段に配置されたコンパレータ(2値化手段に相当)107Cにおいて所定の閾値(Ref2)と大小比較され、“1”若しくは“0”に2値化される。つまり、このコンパレータ107Cは、中央の加速度センサ101Cの過去所定時間内の出力信号中に含まれる低域周波数成分エネルギが所定値Ref2に達したか否かを判定する。なお、絶対値変換器104Cを使用しない場合には、いずれか一方の衝突のみの低域成分に着目することとなるので、本実施例で絶対値変換器を使用しない場合には、区間積分器106Cの後段に逆符号のしきい値を判定するコンパレータがもう一つ必要となり、左右の両側面ユニットにそれぞれ組み合わされることとなる。
【0195】一方、このようにして、車両左側面ユニットLUのコンパレータ107L、並びに、車両右側面ユニットRUのコンパレータ107Rにて生成された2値化出力信号は、適当な伝送装置を介して車両中央ユニットCUへと送信される。尚、伝送装置を構成する送信機並びに受信機としては、“H”及び“L”をベースバンドのまま送受する簡単な構成は勿論のこと、その他、例えば高速伝送用の専用通信プロトコルで結ばれた一対の専用ICを車両左側面並びに右側面ユニットLU,RUと車両中央ユニットCUとのそれぞれに搭載することで構成することができる。またこれ以外にも、例えばインタフエイス回路とマイクロコンピュータにより独自の通信プロトコルに基づいて通信を行う構成とすることもできる。
【0196】次に、車両左側面ユニットLU並びに車両右側面ユニットRUから送られてくる2値化出力信号に基づいて、車両中央ユニットCUにおいて車体左側面若しくは車体右側面の変形有無を判定する動作を説明する。図14に示されるように、車両中央ユニットCUには、先に説明した判定手段(J)に相当する、左側面変形判定部LJと右側面変形判定部RJとが含まれている。
【0197】左側面変形判定部LJは、車両左側ユニットLUのコンパレータ107Lから送られてくる高域周波数成分エネルギ(閾値Ref1を越えているか否か)を示す2値化信号と、車両中央ユニットCUのコンパレータ107Cから送られてくる低域周波数成分エネルギ(閾値Ref2を越えているか否か)を示す2値化信号とに基づいて、車体の左側面に変形の有無を判定する。ここで、車両左側ユニットLUのコンパレータ107Lから送られてくる2値化信号のオンタイミング(しきい値Ref1を越えたタイミング)の方が車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)よりも早い場合には、車体の左側面に変形があるものとの判定が行われる。これに対して、車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)の方が車両左側ユニットLUのコンパレータ107Lから送られてくる2値化信号のオンタイミング(しきい値Ref1を越えたタイミング)よりも早い場合には、車体の左側面に変形がないものとの判定が行われる。
【0198】右側面変形判定部RJは、車両右側ユニットRUのコンパレータ107Rから送られてくる高域周波数成分エネルギ(閾値Ref1を越えているか否か)を示す2値化信号と、車両中央ユニットCUのコンパレータ107Cから送られてくる低域周波数成分エネルギ(閾値Ref2を越えているか否か)を示す2値化信号とに基づいて、車体の右側面に変形の有無を判定する。ここで、車両右側ユニットRUのコンパレータ107Rから送られてくる2値化信号のオンタイミング(しきい値Ref1を越えたタイミング)の方が車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)よりも早い場合には、車体の右側面に変形があるものとの判定が行われる。これに対して、車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)の方が車両右側ユニットRUのコンパレータ107Rから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)よりも早い場合には、車体の右側面に変形がないものとの判定が行われる。
【0199】反対側側面における低域周波数成分エネルギをX軸、衝突側側面における高周波域成分エネルギをY軸とする2軸平面上において、衝突側側面に変形が生じたか否かを判定するようにした場合の判定結果の一例が図18に示されている。
【0200】同図において、aは車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こしたような場合における2軸平面上の値を示す曲線、bはオフセット側面衝突を起こした場合における2軸平面上の値を示す曲線、cは斜め側面衝突を起こした場合における2軸平面上の値を示す曲線、dは側面衝突を起こした場合における2軸平面上の値を示す曲線、eは側面に変形の有無を判定するために選ばれた所定傾きの閾値角度直線である。
【0201】図7を参照して先に説明したように、2軸平面上の座標値がX軸と閾値角度直線eとに挟まれる図中斜線で縁取られた領域に存在する場合には、衝突側側面には変形(イントルージョン等)が生じないものと判定される。これに対して、2軸平面上の値が、Y軸と閾値直線eとで挟まれる領域に存在する場合には、衝突側側面には変形(イントールジョン等)が生ずるものと判定される。
【0202】このような前提の基に各曲線a,b,c,dを観察すると、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こした場合には、曲線aが斜線で囲まれた領域に存在することから、衝突側側面には変形(イントルージョン等)が生じないものと正しく判定される(判定1)。また、オフセット側面衝突の場合にも、曲線bが斜線で囲まれた領域に存在することから、衝突側側面には変形が生じないものと正しく判定される(判定2)。これに対して、斜め側面衝突を起こしたような場合には、曲線cが斜線で囲まれた領域に存在しないことから、衝突側側面に変形(イントルージョン等)が生ずるもの正しく判定される(判定3)。また、車両側面衝突の場合にも、曲線dが斜線で囲まれた領域には存在しないことから、衝突側側面に変形が生ずるもの正しく判定される(判定4)。
【0203】以上の判定(判定1〜4)は別の観点からすれば、つぎのようにも理解される。
【0204】すなわち、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こした場合には、曲線aは時間の経過と共に線分PQを横切る。同様にして、オフセット側面衝突の場合にも、曲線bは時間の経過と共に線分PQを横切る。これに対して、斜め側面衝突を起こしたような場合には、曲線cは時間の経過と共に線分RQを横切る。同様にして、車両側面衝突の場合にも、曲線dは時間の経過と共に線分RQを横切る。ここで、任意の曲線が線分PQを横切ると言うことは、衝突側高域周波数成分エネルギが閾値Ref1を越えるよりも先に、反対側低域周波数成分エネルギが閾値Ref2を越えることを意味している。同様にして、任意の曲線が線分RQを横切ると言うことは、反対側低域周波数成分エネルギが閾値Ref2を越えるよりも先に、衝突側高域周波数成分エネルギが閾値Ref1を越えることを意味している。
【0205】そのため、車両の左右両側の2個の加速度センサから何らかの信号が得られた場合、衝突側の加速度信号に含まれる高域周波数成分エネルギと反対側の加速度信号に含まれる低域周波数成分エネルギとのそれぞれに着目し、いずれが先に閾値(Ref1又はRef2)を越えたかを観察することにより、その衝撃に伴い衝突側側面に変形の有無を的確に判定することができるのである。
【0206】このように、図14に示される装置によれば、衝突側と中央側との2箇所の加速度センサから到来する抽出帯域の異なる周波数成分エネルギを比較すると言う構成を採用しているため、衝突による車体側面の変形と連動して変位する車体部位に生ずる(必ずしも車体側面の変形のみには起因しない)加速度信号を少なくとも用いつつも、車体の衝突側側面に実際に変形が生じたか否かを的確に判定することができる。加えて、それら周波数成分エネルギが規定値に達したことをその加速度センサと一体に構成したコンパレータにて判定し、それらの判定結果たる1ビットの信号を伝送していずれが先にオンするかを側面変形判定部(LJ,RJ)にて判定すると言う構成を採用しているため、ユニットLU,RUの相互間において多ビットの加速度データそれ自体を伝送することが不要となり、ノイズの影響を回避できるため、信頼性が向上する利点がある。
【0207】次に、図15に示される装置について説明する。この車体側面変形有無判定装置は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットCUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側と反対側に位置するユニットに相当するように構成されている。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する右側面変形判定部RJと左側面変形判定部LJとが含まれている。
【0208】すなわち、図14と図15との比較により明らかなように、図15に示される装置にあっては、車両左側ユニットLU並びに車両右側ユニットRU内に、ローパスフィルタ(LPF)104L´,104R´、絶対値変換器(ABS)105L´,105R´、区間積分器106L´,106R´、コンパレータ107L´,107R´が含まれている。そのため、図14に示される装置で必要とされた車両中央ユニットCU内の要素101C,102C,103C,104C,105C,106C,107Cが取り除かれている。なお、図1414に示される装置と同一構成要素については、同符号を付すことにより説明は省略する。
【0209】この図15に示される装置によれば、加速度センサが2個で済むことに加え、第1加速度検出ユニット(U1)と第2加速度検出ユニット(U2)とが車両重心から等距離となるため、衝突により車両が回転した場合にも、それによる影響が両検出ユニット(U1,U2)に対して均等に作用することとなり、加速度検出の信頼性が高いと言う利点がある。なお、絶対値変換器105L´と105R´を使用しない場合、互いに反対側の衝突方向の低域成分を判定する符号に合わせたコンパレータ107L´と107R´のしきい値とすることになる。
【0210】次に、図16に示される装置について説明する。先に説明したように、この車体側面変形有無判定装置は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側と反対側に位置するユニットに相当するように構成されている。さらに、車両左側ユニットLUには、本発明の判定手段(J)に相当する左側変形判定部LJが、また車両右側ユニットRUには、本発明の判定手段(J)に相当する右側面変形判定部RJが含まれている。
【0211】すなわち、図15と図16との比較により明らかなように、図16に示される装置にあっては、車両左側ユニットLU内に左側面変形判定部LJを、また車両右側ユニットRU内に右側面変形部RJをそれぞれ含ませることにより、車両中央ユニットCUそれ自体を省略している。なお、図15に示される装置と同一構成要素については、同符号を付すことにより説明は省略する。
【0212】この図16に示される装置によれば、図15R>5に示される装置の利点に加えて、後述する側方エアバッグ起動制御装置が左右別々に左側面ユニットLU並びに右側面ユニットRUに内蔵される場合に、それに併せて左側面変形判定部LJ並びに右側面変形判定部RJを配置できる利点がある。
【0213】次に、図17に示される装置について説明する。この車体側面変形有無判定装置は、衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニット(U1)と、衝突による車体の一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる複数の第2加速度検出ユニット(U2)と、を具備する。前記第1加速度検出ユニット(U1)には、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが含まれている。一方、前記複数の第2加速度検出ユニット(U2)のそれぞれには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが含まれている。さらに、この車体側面に変形有無を判定する装置には、前記第1加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号と、前記複数の第2加速度検出ユニットのそれぞれに内蔵される2値化手段から出力される2値化信号とに基づいて、車体側面の変形有無を判定する判定手段が設けられている。
【0214】特に、この図17に示される実施形態では、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニット(RU)と、車体の左側面変形に連動して変位する車体部位に取り付けられる車両左側ユニット(LU)と、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニット(CU)とを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットと前記車両左側ユニットとのうちの衝突側に位置するユニットに相当する。また、前記複数の第2加速度検出ユニット(U2)が、前記車両右側ユニット(RU)と前記車両左側ユニット(LU)とのうちの衝突側と反対側に位置するユニットと、前記車両中央ユニット(CU)に相当する。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する第1、第2左側面判定部LJ1,LJ2と第1、第2右側面変形判定部RJ1,RJ2とが含まれている。
【0215】すなわち、図17に示されるように、車両左側ユニットLU並びに車両右側ユニットRU内には、ハイパスフィルタ(HPF)104L,104R、絶対値変換器(ABS)105L,105R、区間積分器106L,106R、コンパレータ107L,107Rからなる高域周波数成分抽出系の他に、区間積分器106L´,106R´、反転入力型のコンパレータ107L´,107R´からなる低域周波数成分抽出系が設けられている。図から明らかなように、この低域周波数成分抽出系は、AD変換器(A/D)103L,103Rの出力信号を、ローパスフィルタ(LPF)や絶対値変換器(ABS)を通過させることなく、区間積分器106L´,106R´に導くようにしたもので、これにより低域を含むより広い所定帯域の周波数成分を抽出するものである。こうして区間積分器106L´,106R´から抽出された低域周波数成分は、その後段に配置された反転入力型のコンパレータ107L´,107R´において、しきい値(−(Ref2))とそれぞれ比較されて2値化される。
【0216】一方、車両中央ユニットCU内には、区間積分器106C,非反転入力型のコンパレータ107C,反転入力型のコンパレータ107C´からなる低域周波数成分抽出系が設けられている。この低域周波数成分抽出系は、AD変換器(A/D)103Cの出力信号を、ローパスフィルタ(LPF)や絶対値変換器(ABS)を通過させることなく、区間積分器106Cに導くようにしたもので、これにより低域を含むより広い所定帯域の周波数成分を抽出するものである。こうして区間積分器106Cから抽出された低域周波数成分は、その後段に並列配置された非反転入力型のコンパレータ107C及び反転入力型のコンパレータ107C´において、しきい値Ref2´,−(Ref2´)とそれぞれ比較されて2値化される。
【0217】さらに、車両中央ユニットCU内には、本発明の判定手段(J)として機能する、第1左側面変形判定部LJ1、第2左側面変形判定部LJ2、第1右側面変形判定部RJ1、第2右側面変形判定部RJ2が含まれている。
【0218】第1左側面変形判定部LJ1は、非反転入力型のコンパレータ107Lから出力される左側の高域周波数成分2値化信号のオンタイミングと、非反転入力型のコンパレータ107Cから出力される中央側の低域周波数成分2値化信号のオンタイミングとに基づいて、車体の左側の側面に変形の有無を判定するものである。第2左側面変形判定部LJ2は、非反転入力型のコンパレータ107Lから出力される左側の高域周波数成分2値化信号のオンタイミングと、反転入力型のコンパレータ107R´から出力される右側の全域周波数成分2値化信号のオンタイミングとに基づいて、車体の左側の側面に変形の有無を判定するものである。
【0219】第1右側面変形判定部RJ1は、非反転入力型のコンパレータ107Rから出力される右側の高域周波数成分2値化信号のオンタイミングと、反転入力型のコンパレータ107C´から出力される中央側の低域周波数成分2値化信号のオンタイミングとに基づいて、車体の右側の側面に変形の有無を判定するものである。第2右側面変形判定部RJ2は、非反転入力型のコンパレータ107Rから出力される右側の高域周波数成分2値化信号のオンタイミングと、反転入力型のコンパレータ107L´から出力される左側の低域周波数成分2値化信号のオンタイミングとに基づいて、車体の右側の側面に変形の有無を判定するものである。
【0220】第1左側面変形判定部LJ1の判定出力と第2左側面変形判定部LJ2の判定出力とはオアゲート108を介して結合されている。そのため、車両左側ユニットLUと車両中央ユニットCUとの比較、或いは、車両左側ユニットLUと車両右側ユニットとの比較のいずれかにおいて、車体左側面に変形が生じたと判定がなされると、左側側面変形有りの旨の判定出力が直ちに外部へ送出される。
【0221】第1右側面変形判定部RJ1の判定出力と第2右側面変形判定部RJ2の判定出力とはオアゲート108´を介して結合されている。そのため、車両右側ユニットRUと車両中央ユニットCUとの比較、或いは、車両右側ユニットRUと車両左側ユニットLUとの比較のいずれかにおいて、車体右側面に変形が生じたと判定がなされると、右側側面変形有りの旨の判定出力が直ちに外部へ送出されこととなる。
【0222】この図17に示される車体側面変形判定装置によれば、衝突側側面の加速度センサの出力を、車両中央側並びに反対側の2箇所のセンサの出力と比較しているため、判定の信頼性を向上させることができる。また、衝突側の高域周波数成分と対比される周波数成分として中央側並びに反対側の低域周波数成分を使用しているため、ローパスフィルタが不要となり、加えて、コンパレータとしても、反転入力型のものを使用しているため、絶対値変換器も不要となる利点がある。
【0223】なお、図17に示される例では、オアゲート108,108’を使用することにより、2個の側面変形判定部の論理和を出力するようにしているが、オアゲート108,108’の代わりにアンドゲートを使用することにより、2個の側面変形部の論理積を出力するようにしてもよい。
【0224】[第3実施形態]次に、本発明に係る車体側面変形有無判定装置が適用された車両用側方エアバッグ起動制御装置全体の構成並びにその動作を図19乃至図24を参照して説明する。
【0225】図19に示されるように、この車両用側方エアバッグ起動制御装置200は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットCUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突と反対側に位置するユニットと前記車両中央ユニットCUの両方に相当するように構成されている。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する右側面変形判定部RJと左側面変形判定部LJとが含まれている。
【0226】車両左側ユニットLUと車両右側ユニットRUとは、同一の構成を有するものである。すなわち、車両左側ユニットLUには、加速度センサ201L,アンチエリアシングフィルタ202L、AD変換器203L、ハイパスフィルタ(HPF)204L、絶対値変換器(abs)205L、区間積分器206L、コンパレータ207L、ローパスフィルタ(LPF)208L、絶対値変換器(abs)209L、区間積分器210L、及び、コンパレータ211Lが含まれている。同様にして、車両右側ユニットRUには、加速度センサ201R,アンチエリアシングフィルタ202R、AD変換器203R、ハイパスフィルタ(HPF)204R、絶対値変換器(abs)205R、区間積分器206R、コンパレータ207R、ローパスフィルタ(LPF)208R、絶対値変換器(abs)209R、区間積分器210R、及び、コンパレータ211Rが含まれている。そして、これらの要素201L,201R〜211L,211Rは、本発明に係る側面変形有無判定装置の一部を構成している。
【0227】加えて、車両左側ユニットLUには、変形無し時の左側面衝突用演算ブロック220Lと変形時の左側面衝突用演算プロック230Lとが含まれている。図20に詳しく示されるように、変形無し時の左側面衝突用演算ブロック220Lは、A/D変換器203Lから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器221Lと、区間積分器221Lの積分結果を所定のしきい値(Vlud)と比較して2値化するコンパレータ222Lと、コンパレータ222Lの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223Lとを含んでいる。
【0228】変形時の左側面衝突用演算プロック230Lは、この例では、変形時高速側面衝突判定ブロック230LAと変形時中速側面衝突判定ブロック230LBとから構成されている。変形時高速側面衝突判定ブロック230LAは、A/D変換器203Lから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LAと、区間積分器231LAの積分結果を所定のしきい値(Vlh)と比較して2値化するコンパレータ232LAと、コンパレータ232LAの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LAとを含んでいる。一方、変形時中速側面衝突判定ブロック230LBは、A/D変換器203Lから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LBと、区間積分器231LBの積分結果を所定のしきい値(Vlm)と比較して2値化するコンパレータ232LBと、コンパレータ232LBの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LBとを含んでいる。
【0229】同様にして、車両右側面ユニットRUには、変形無し時の右側面衝突用演算ブロック220Rと変形時の右側面衝突用演算ブロック230Rとが含まれている。
【0230】図21に示されるように、変形無し時の右側面衝突用演算ブロック220Rは、A/D変換器203Rから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器221Rと、区間積分器221Rの積分結果を所定のしきい値(Vrud)と比較して2値化するコンパレータ222Rと、コンパレータ222Rの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223Rとを含んでいる。
【0231】変形時の右側面衝突用演算プロック230Rは、変形時高速側面衝突判定ブロック230RAと変形時中速側面衝突判定ブロック230RBとから構成されている。変形時高速側面衝突判定ブロック230RAは、A/D変換器203Rから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231RAと、区間積分器231RAの積分結果を所定のしきい値(Vrh)と比較して2値化するコンパレータ232RAと、コンパレータ232RAの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RAとを含んでいる。一方、変形時中速側面衝突判定ブロック230RBは、A/D変換器203Rから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231RBと、区間積分器231RBの積分結果を所定のしきい値(Vrm)と比較して2値化するコンパレータ232RBと、コンパレータ232RBの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RBとから構成されている。
【0232】一方、車両中央ユニットCUには、変形無し時の左側面衝突用演算プロック220LCと、変形時の左側面衝突用演算プロック230LCと、変形無し時の右側面衝突用演算ブロック220RCと、変形時の右側面衝突用演算ブロック230RCとが含まれている。
【0233】図22に示されるように、変形無し時の左側面衝突用演算プロック220LCは、A/D変換器203Cから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器221LCと、区間積分器221LCの積分結果を所定のしきい値(Vcud)と比較して2値化するコンパレータ222LCと、コンパレータ222LCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223LCとから構成されている。
【0234】変形時の左側面衝突用演算プロック230LCは、変形時高速側面衝突判定ブロック230LACと変形時中速側面衝突判定ブロック230LBCとから構成されている。変形時高速側面衝突判定ブロック230LACは、A/D変換器203Cから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LACと、区間積分器231LACの積分結果を所定のしきい値(Vch)と比較して2値化するコンパレータ232LACと、コンパレータ232LACの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LACとを含んでいる。一方、変形時中速側面衝突判定ブロック230LBCは、A/D変換器203Cから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LBCと、区間積分器231LBCの積分結果を所定のしきい値(Vcm)と比較して2値化するコンパレータ232LBCと、コンパレータ232LBCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LBCとを含んでいる。
【0235】変形無し時の右側面衝突用演算プロック220RCは、区間積分器221LCの積分結果を所定のしきい値(−(Vcud))と比較して2値化するコンパレータ222RCと、コンパレータ222RCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223RCとを含んでいる。
【0236】変形時の右側面衝突用演算プロック230RCは、変形時高速側面衝突判定ブロック230RACと変形時中速側面衝突判定ブロック230RBCとから構成されている。変形時高速側面衝突判定ブロック230RACは、区間積分器231LACの積分結果を所定のしきい値(−(Vch))と比較して2値化するコンパレータ232RACと、コンパレータ232RACの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RBCとを含んでいる。一方、変形時中速側面衝突判定ブロック230RBCは、区間積分器231LBCの積分結果を所定のしきい値(−(Vcm))と比較して2値化するコンパレータ232RBCと、コンパレータ232RBCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RBCとを含んでいる。
【0237】加えて、車両中央ユニットCUには、さらに、変形無し時の左側面衝突判定部240Lと、変形時の左側面衝突判定部250Lと、変形無し時の右側面衝突判定部240Rと、変形時の右側面衝突判定部250Rと、左側面の変形有無判定部LJと、右側面の変形有無判定部RJと、左側面の衝突総合判定部260Lと、右側面の衝突総合判定部250Rとが含まれている。
【0238】変形無し時の左側面衝突判定部240Lは、車両左側ユニットLUに内蔵された変形無し時の左側面衝突用演算ブロック220Lからの信号と車両中央ユニットCUに内蔵された変形無し時の左側面衝突判定用演算プロック220LCからの信号とに基づいて、車体左側面に変形が生じない状態であっても、乗員が傷害を受ける虞があるか否かを判定する。図22に示されるように、この変形無し時の左側面衝突判定部240Lの機能は、アンドゲート241Lにより実現することができる。
【0239】変形時の左側面衝突判定部250Lは、車両左側ユニットLUに内蔵された変形時高速側面衝突判定用演算ブロック230LAからの信号と、車両中央ユニットCUに内蔵された変形時高速左側面衝突判定用演算プロック230LACからの信号とに基づいて、車体左側面に高速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。同時に、変形時の左側面衝突判定部250Lは、車両左側ユニットLUに内蔵された変形時中速側面衝突判定用演算ブロック230LBからの信号と、車両中央ユニットCUに内蔵された変形時中速左側面衝突判定用演算プロック230LBCからの信号とに基づいて、車体左側面に中速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。図22に示されるように、この変形時の左側面衝突判定部250Lの機能は、2個のアンドゲート251L,252Lと1個のオアゲート253Lとで実現することができる。
【0240】変形無し時の右側面衝突判定部240Rは、車両右側ユニットRUに内蔵された変形無し時の右側面衝突用演算ブロック220Rからの信号と、車両中央ユニットCUに内蔵された変形無し時の右側面衝突判定用演算プロック220RCからの信号とに基づいて、車体右側面に変形が生じない状態で乗員が障害を受ける虞があるか否かを判定する。図22に示されるように、この変形無し時の左側面衝突判定部240Rの機能は、アンドゲート241Rにより実現することができる。
【0241】変形時の右側面衝突判定部250Rは、車両右側ユニットRUに内蔵された変形時高速側面衝突判定用演算ブロック230RAからの信号と、車両中央ユニットCUに内蔵された変形時高速右側面衝突判定用演算プロック230RACからの信号とに基づいて、車体右側面に高速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。同時に、変形時の右側面衝突判定部250Rは、車両右側ユニットRUに内蔵された変形時中速側面衝突判定用演算ブロック230RBからの信号と、車両中央ユニットCUに内蔵された変形時中速右側面衝突判定用演算プロック230RBCからの信号とに基づいて、車体右側面に中速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。図22に示されるように、この変形時の左側面衝突判定部250Lの機能は、2個のアンドゲート251R,252Rと1個のオアゲート253Rとで実現することができる。
【0242】左側面変形有無判定部LJは、車両左側ユニットLUに内蔵された高域成分2値化用のコンパレータ207Lからの2値化信号のオンタイミングと車両右側ユニットRUに内蔵された低域成分2値化用のコンパレータ211Rからの2値化信号のオンタイミングとを比較し、高域成分側のオンタイミングの方が低域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていると判定し、低域成分側のオンタイミングの方が高域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていないと判定する。
【0243】右側面変形有無判定部RJは、車両右側ユニットRUに内蔵された高域成分2値化用のコンパレータ207Rからの2値化信号のオンタイミングと車両左側ユニットLUに内蔵された低域成分2値化用のコンパレータ211Lからの2値化信号のオンタイミングとを比較し、高域成分側のオンタイミングの方が低域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていると判定し、低域成分側のオンタイミングの方が高域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていないと判定する。
【0244】図19並びに図22に示される側面変形有無判定部(LJ又はRJ)の動作が図23並びに図24に示されている。尚、図23は側面変形を殆ど有しない移動のみの場合の動作であり、図24は乗員に障害が及びかねない側面変形を有する場合の動作である。又、図中、曲線aは衝突側の高域周波数エネルギ、曲線bは反対側の低域周波数エネルギ、直線cは閾値Ref1(=Ref2)の大きさ、曲線dは衝突側コンパレータの出力、曲線eは衝突側と反対側コンパレータの出力、曲線fは側面変形判定部(LJ又はRJ)の出力である。
【0245】図23から明らかなように、衝突側並びに衝突側と反対側の加速度信号が、側面変形を殆ど有しない移動のみに起因する場合には、曲線bに示される衝突側と反対側の低域周波数成分エネルギの方が、曲線aに示される衝突側の高域周波数成分エネルギよりも先に、直線cに示される閾値Ref1(=Ref2)を越えることとなる。すると、曲線eに示される衝突側と反対側コンパレータ出力の方が、曲線dに示される衝突側コンパレータ出力よりも先にオンすることにより、曲線fに示される変形有無判定出力は初期状態である『変形無し』に維持される。
【0246】図24から明らかなように、衝突側並びに衝突側と反対側の加速度信号が、衝突による側面変形に起因する場合には、曲線aに示される衝突側の高域周波数成分エネルギの方が、曲線bに示される衝突側と反対側の低域周波数成分エネルギよりも先に、直線cに示される閾値Ref1(=Ref2)を越えることとなる。すると、曲線dに示される衝突側コンパレータ出力の方が、曲線eに示される衝突側と反対側コンパレータ出力よりも先にオンすることにより、このオンタイミングに応答して、曲線fに示される変形有無判定出力は初期状態である『変形無し』から『変形有り』に転ずることとなる。なお、図24に示されるように、曲線fに示される変形有無判定出力は、曲線a,bに示される両成分エネルギがいずれも直線cに示される閾値よりも低下するのを待って、『変形有り』から『変形無し』へと自動的に復帰する。
【0247】左側面衝突総合判定部260Lは、左側面変形有無判定部LJの判定結果に応じて、変形無し時の左側面衝突判定部240Lの判定結果と変形時の左側面衝突判定部250Lの判定結果とのいずれかを、左側の側方エアバッグの起動信号SLとして出力する。図22に示されるように、この左側面衝突総合判定部260Lの機能は、オアゲート261Lとアンドゲート262Lとで実現することができる。
【0248】右側面衝突総合判定部260Rは、右側面変形有無判定部LJの判定結果に応じて、変形無し時の右側面衝突判定部240Rの判定結果と変形時の右側面衝突判定部250Lの判定結果とのいずれかを、右側の側方エアバッグの起動信号SLとして出力する。図21に示されるように、この右側面衝突総合判定部260Rの機能は、オアゲート261Rとアンドゲート262Rとで実現できる。
【0249】
【発明の効果】以上の説明から明らかなように、本発明によれば、車体側面に取り付けられて車体側面の変形と車両全体の移動とが合成された加速度を検出する加速度センサの出力を用いつつも、車両の衝突に伴い車両側面に実際に変形が生じたか否かを的確に判定することができる。
【0250】そのため、この判定出力を利用すれば、側方エアバッグ起動制御装置において、乗員に影響のない低速縁石側面衝突や低速オフセット側面衝突に起因して加速度の区間積分結果が衝突直後に比較的に急峻に立ち上がったとしても、実際に側面変形が生じていない旨の判定出力を加味することにより、側方エアバッグシステムの不要な作動を未然に防止することができる。
【0251】さらに、側面変形の伴わない衝突であっても、乗員が傷害を受ける虞のある中高速縁石側面衝突や中高速オフセット側面衝突の場合には、側面変形の伴わない場合における判定基準を適用することにより、側方エアバッグシステムを確実に起動させて、乗員が慣性でドア内側に衝突して傷害を受ける事態を未然に防止することができる。
【図面の簡単な説明】
【図1】車体の衝突側側面、車体中央部、並びに、車体の反対側側面にそれぞれ対応して取り付けられた加速度センサの出力の周波数分布が、イントルージョンの生じていない時間帯とイントルージョンの生じている時間帯とでどのように相違するかを示す図である。
【図2】車体の衝突側側面、並びに、車体の反対側側面にそれぞれ対応して取り付けられた2個の加速度センサの出力の立ち上がりタイミングが、車体側面に変形のある場合とない場合とでどのように相違するかを示す図である。
【図3】車体の衝突側側面、車体中央部、並びに、車体の反対側側面にそれぞれ対応して取り付けられた加速度センサの出力の周波数分布が、前部右側面へのオフセット側面衝突により車体が回転する場合、後部右側面へのオフセット側面衝突により車体が回転する場合、並びに、剛性の高い車体への衝突の場合で、どのように相違するかを示す図である。
【図4】本発明の第1実施形態にかかる方法および装置が適用された側方エアバッグ起動制御装置全体の電気的な構成を概略的に示すプロック図である。
【図5】加速度センサの取付部位を説明するための車体構造図である。
【図6】周波数成分抽出用のローバスフィルタ並びにバンドパスフィルタの周波数特性を説明するためのグラフである。
【図7】2軸平面上の領域比較を用いて側面変形有無を判定する手法を説明するためのグラフである。
【図8】反対側低周波成分エネルギと衝突側高周波域成分エネルギとの比を用いて側面変形有無を判定する手法を説明するためのグラフである。
【図9】反対側低周波域成分エネルギと衝突側高周波域成分との比を用いて側面変形を伴う衝突を実際に判定した結果を示すグラフである。
【図10】反対側低周波域成分エネルギと衝突側高周波域成分との比を用いて側面変形を伴わない衝突を実際に判定した結果を示すグラフである。
【図11】本発明の第2実施形態に係る装置におけるユニット配置の一例を示す車体構造図である。
【図12】本発明の第2実施形態に係る装置におけるユニット配置の他の一例を示す車体構造図である。
【図13】本発明の第2実施形態に係る装置に適用される変形有無判定手法の幾つかの例を示す図である。
【図14】本発明の第2実施形態に係る装置の一例を示すブロック図である。
【図15】本発明の第2実施形態に係る装置の他の一例を示すブロック図である。
【図16】本発明の第2実施形態に係る装置の他の一例を示すブロック図である。
【図17】本発明の第2実施形態に係る装置のさらに他の一例を示すブロック図である。
【図18】本発明の第2実施形態に係る装置において、第1の判定手法により側面変形有無判定を実際に行った結果を示すグラフである。
【図19】本発明の第3実施形態に係る車両用サイドエアバッグ起動制御装置の全体構成を示すブロック図である。
【図20】図19に示す装置の車両左側ユニットの詳細を示すブロック図である。
【図21】図19に示す装置の車両右側ユニットの詳細を示すブロック図である。
【図22】図19に示す装置の車両中央ユニットの詳細を示すブロック図である。
【図23】図19に示す装置の変形有無判定装置の変形無し時の動作を示すタイムチャートである。
【図24】図19に示す装置の変形有無判定装置の変形時の動作を示すタイムチャートである。
【図25】従来装置の問題点を説明するためのグラフである。
【図26】区間積分の定義を説明するための図である。
【符号の説明】
LU 車両左側ユニット
RU 車両右側ユニット
CU 車両中央ユニット
G 重心
1L,1R 加速度センサ
2L,2R アンチエリアシングフィルタ
3L,3R AD変換器
4L,4R 送信器
5L,5R 受信器
6L,6R バンドパスフィルタ
7L,7R 絶対値変換器
8L,8R 区間積分器
9L,9R ローパスフィルタ
10L,10R 絶対値変換器
11L,11R 区間積分器
12 側面変形有無判定部
13 起動要否判定部
14L 左側Aピラー
15L 左側Bピラー
15R 右側Bピラー
16L 左側Cピラー
17L 左側サイドシル
17R 右側サイドシル
18L 左側前ドアインナパネル
19L 左側前ドアビーム
20 センタトンネル
21 前席クロスメンバ
22 後席クロスメンバ
23L 左側後ドアビーム
24L 左側後ドアインナパネル
25 サイドルーフフレーム
101L,101R,101C 加速度センサ
102L,102R,102C アンチエリアシングフィルタ
103L,103R,103C AD変換器
104L,104R ハイパスフィルタ
104C,104L’,104R’ ローパスフィルタ
105L,105R,105C 絶対値変換器
106L,106R,106C,106L’,106R’ 区間積分器
107L,107R,107C,107L’,107R’ コンパレータ
LJ 左側面変形判定部
LR 右側面変形判定部
LJ1 第1左側面変形判定部
LJ2 第2左側面変形判定部
RJ1 第1右側面変形判定部
RJ2 第2右側面変形判定部
200 側方エアバッグ起動制御装置
201L,201R,201C 加速度センサ
202L,202R,202C アンチエリアシングフィルタ
203L,203R,203C A/D変換器
204L,204R ハイパスフィルタ
208L,208R ローパスフィルタ
205L,209L,205R,209R 絶対値変換器
206L,210L,206R,210R 区間積分器
207L,211L,207R,211R コンパレータ
220L,220LC 変形無し時の左側面衝突用演算ブロック
230L,230LC 変形時の左側面衝突用演算ブロック
220R,220RC 変形無し時の右側面衝突用演算ブロック
230R,230RC 変形時の右側面衝突用演算ブロック
240L 変形無し時の左側面衝突用判定部
240R 変形無し時の右側面衝突用判定部
250L 変形時の左側面衝突用判定部
250R 変形時の右側面衝突用判定部
260L 左側面衝突総合判定部
260R 右側面衝突総合判定部
SL 左側の側方エアバッグ起動信号
SR 右側の側方エアバッグ起動信号
【0001】
【発明の属する技術分野】この発明は、例えば、車体適所に取付けられた1もしくは2以上の加速度センサの出力に基づいて、車体側面の変形有無、すなわち乗員を収容する乗員室(キャビン)側面の変形有無可能性を判定する装置に係り、例えば、車両用側方エアバッグ起動制御システムの信頼性向上等の用途に好適な車体側面の変形有無を判定する装置に関する。
【0002】
【従来の技術】側方エアバッグの作動が必要とされる代表的な事象としては、次の2つの事象が存在する。その1つは、他の車両等の重量物が高速に乗員に近い車体側面に衝突し、これにより乗員が慣性によりドア側へ移動するよりも早く、ドアインナパネル等の方が先に車室内に侵入(イントルージョン)して乗員が傷害を受ける事象である。他の1つは、他の車両等の重量物が比較的に中程度の速度で乗員に近い車体側面に衝突し、イントルージョンはさほど大きくはないものの、イントルージョンと慣性によるドア側への移動とが相まって、乗員がドア内側に強く衝突して傷害を受ける事象である。
【0003】これらの事象に的確に対応するためには、ドア内に圧縮スイッチ等のセンサをあらかじめ埋め込んでおき、衝突によるイントルージョンによってそれらが作動するのに応答して、側方エアバッグを作動させることが考えられる。
【0004】しかしながら、このような方法によると、この種の圧縮スイッチ等のセンサの検知範囲は比較的狭いため、想定されるあらゆる側面衝突態様に対応するためには、車体側面に相当数のセンサを埋め込まねばならず、コストアップを来す結果となる。また、電柱等が車体のセンタピラー(Bピラー)に衝突した場合のように、衝突速度は高くてもドアの変形に及ぼす影響が小さい場合には、いかにドア面での検知範囲を広げたとしても、それらセンサが作動しない場合も考えられる。
【0005】そこで、このような圧縮スイッチ等のセンサを用いるのではなく、車体の側面、特に、センタピラー下端部やサイドシル等といった比較的剛性の高い車体部位に加速度センサを取付け、この加速度センサで検出される車体側面の変形と車体全体の移動とが合成された加速度を、例えば、特開平4−325349号公報に示されるように、積分時間の異なる複数の区間積分器(一般には、移動積分処理としてソフトウェア的に実現される)を介して監視することにより、様々な側面衝突態様に対応することが考えられる。
【0006】このような構成によれば、車体側面に取付けられた加速度センサは、車体の比較的剛性の高い部分に取付けられているため、1個の加速度センサによって車体側面の比較的広範囲にわたる衝突に対応することができ、しかも事象の相違に対しては、区間積分器の積分時間や判定閾値の調整により回路的又はソフトウェア的に対応できるため、構成が簡単で低コストに製作できる利点がある。
【0007】例えば、他の車両等の重量物が高速に乗員に近い車両側面に衝突し、慣性により乗員がドア側へ移動するよりも早く、ドアインナパネル等の方が先に車室内に侵入(イントルージョン)して乗員が傷害を受ける事象(以下、高速側面衝突と言う)に対しては、積分時間(積分区間)を短かめ(5ms程度)に設定しかつ区間積分結果を所定のしきい値と比較することで、このような事象を判定することができる。
【0008】また、他の車両等の重量物が比較的に中程度の速度で乗員に近い車両側面に衝突し、イントルージョンはさほど大きくはないものの、イントルージョンと慣性によるドア側への移動とが相まって、乗員がドア内側に強く衝突して傷害を受ける事象(以下、中速側面衝突と言う)に対しては、積分時間を長め(10〜40ms程度)に設定しかつ区間積分結果を所定の閾値と比較することにより、このような事象を判定することができる。
【0009】
【発明が解決しようとする課題】しかしながら、上述のような側方エアバッグ起動制御システムにあっては、車体側面の変形と車両全体の移動とが合成された加速度の区間積分結果(積分区間内における速度変化量に相当)を監視し、その区間積分結果が所定の閾値を超えさえすれば、側方エアバッグの起動必要ありと無条件で判定するようになっているため、積分区間内における速度変化量の割には乗員への影響が少ない特殊な側面衝突態様では、乗員が傷害を受ける程の衝撃がないにも拘わらず、側方エアバッグの作動が必要であると誤判定される虞がある。
【0010】例えば、車両が横すべりして道路縁石に衝突(以下、縁石側面衝突と言う)したり、車両走行中に道路縁石に斜め横方向から進入して衝突したのち斜め横方向に跳ね返される衝突(以下、縁石斜め跳ね返りと言う)をしたような場合を想定すると、このような側面衝突態様にあっては、車両側面ホイール並びにサイドシルが道路縁石に衝突すると言った剛体同士の衝突となるため、その衝突速度が乗員への傷害の虞がないほどの低速であっても、衝突直後の積分区間内における速度変化量の値はかなり高い値となり、実際、先に述べた中速側面衝突の判定論理を適用すると、側方エアバッグの作動が必要であると誤判定される虞があることが判明した。また、低速の縁石側面衝突においては、高速側面衝突の判定論理条件に匹敵する程の短区間の急峻な速度変化量となることも判明した。
【0011】加えて、乗員室側面の変形が僅かな車両前部側面若しくは後部側面への衝突(以下、オフセット側面衝突と言う)等においても、その衝突速度が乗員への傷害の虞がないほどの低速であっても、衝突直後の積分区間内における速度変化量の値はかなり高い値となり、実際、先に述べた中速側面衝突の判定論理を適用すると、側方エアバッグの作動が必要であると誤判定される虞があることが判明した。
【0012】このような判定の様子を図25を参照して更に説明する。同図において、(a)は中速側面衝突等のように側方エアバッグの作動を必要とする側面変形を有する衝突の場合における加速度の全時間積分結果(衝突直後から約100ms後までの全時間積分結果)の時間的な推移を示すグラフ、(b)は低速縁石側面衝突等のように側方エアバッグの作動を必要としない側面変形を有しない衝突の場合における加速度の全時間積分結果(衝突直後から100ms後までの全時間積分結果)の時間的な推移を示すグラフである。
【0013】尚、これらのグラフにおいて、t1は衝突判定を完了すべき時刻、t2は乗員が傷害を受ける虞のある時刻、Tは側方エアバッグの作動に必要とされる時間であり、また実線は衝突側の側面に取付けられた加速度センサの出力に対応した値、破線は衝突側の側面と反対側の側面に取付けられた加速度センサの出力に対応する値である。
【0014】図25(a)に示されるように、側面変形を有する衝突の場合、衝突側(インパクト側)における加速度の全時間積分結果は、図中ハッチングにて示される車体変形成分の存在に起因して、比較的急峻に立上がり、判定時刻t1を経過した以降についても上昇を継続する。ところが、図25(b)に示されるように、側面変形を有しない衝突の場合であっても、例えば車両側面ホイールやサイドシルと縁石との衝突といった剛体同士の衝突の場合には、両者の衝突速度が比較的低いにも拘らず、全時間積分結果は側面変形を有する衝突の場合と同様に急峻に立上がり、側面変形を有する衝突の場合と同様なレベルにまで達する。
【0015】ここで、衝突判定に用いられる加速度の区間積分値とは、図26に示されるように、予め決められた積分時間(区間)ΔTに亘り加速度センサの出力G(k)を積分した値、すなわち図25(a),(b)に示される曲線の傾きとほぼ見なすことができる。そのため、加速度の区間積分結果を所定の1個の閾値と比較して側方エアバッグの作動要否を判定しようとする限り、図25(a)に示されるような側方エアバッグの作動を必要とする中速側面衝突等の場合と、図25(b)に示されるような側方エアバッグの作動を必要としない低速縁石側面衝突等とを識別することが困難となる。
【0016】ここにおいて、本発明者等は、加速度センサの出力に基づいて車体側面の変形、すなわち乗員を収容するキャビンの変形有無それ自体を直接的に判定することができれば、上述した図25(a)の場合と図25(b)の場合とを容易に区別できるとの着想に基づき鋭意研究の結果、次のような知見を得た。
【0017】即ち、衝突による車体側面の変形と連動して変位する車体部位に取付けられた加速度センサの過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、両周波数分布に一定の相関が見られる(以下、第1の知見と言う)。
【0018】また、衝突による車体側面の変形と連動して変位する第1の車体部位に取り付けられた加速度センサ、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に取り付けられた加速度センサの出力に関しても、過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、両者間に一定の相関が見られる(以下、第2の知見と言う)。
【0019】そして、これらの相関は、車体側面が変形する際に生ずる特有な周波数成分の有無に起因するものであると推定される。
【0020】この発明は、上述した本発明者等による新たな知見に基づきなされたものであり、その目的とするところは、衝突による車体側面の変形と連動して変位する車体部位に生ずる、車体の変形と車体の移動とが合成された加速度信号を用いつつも、車体の衝突側側面に実際に変形が生じたか否かを的確に判定可能とすることにある。
【0021】
【課題を解決するための手段】先に説明したように、本発明者等は、加速度センサの出力に基づいて車体側面の変形、すなわち乗員を収容するキャビンの変形有無を直接的に判定することができれば、上述した図25(a)の場合と図25(b)の場合とを容易に区別できるとの着想に基づき鋭意研究の結果、次のような2つの知見を得た。
【0022】即ち、衝突による車体側面の変形と連動して変位する車体部位に取付けられた加速度センサの過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、図1(I)(a),図1(II)(a’)に示されるように、両周波数分布に一定の相関が見られる(第1の知見)。
【0023】また、衝突による車体側面の変形と連動して変位する第1の車体部位に取り付けられた加速度センサ、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に取り付けられた加速度センサの過去所定時間内の出力信号に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる場合と変形の生じない場合とでは、図1(I)における(a)と(b)もしくは(c)との比較、並びに、図1(II)における(a’)と(b’)もしくは(c’)との比較から明らかなように、両者間に一定の相関が見られる(第2の知見)。
【0024】これらの相関は、車体側面が変形する際に生ずる特有な周波数成分の有無に起因するものであると推定される。
【0025】以下、第1の知見に基づいて、変形有無の判定に必要とされる加速度検出点を側面変形感応部(例えば、衝突側側面等)のみとする発明をシングルポイントタイプの発明、第2の知見に基づいて、変形有無の判定に必要とされる加速度検出点を側面変形感応部(例えば、衝突側側面等)と側面変形不感応部(例えば、車体中央部、及び/又は、車体反対側側面)との双方とする発明をマルチプルポイントタイプの発明と称することとする。
【0026】先ず、最初に、シングルポイントタイプの発明について説明する。
【0027】この発明では、先ず、衝突による車体側面の変形と連動して変位する車体部位に生ずる加速度が検出される。続いて、前記検出される加速度の過去所定時間内における変化に含まれる周波数成分が分析される。最後に、前記分析により得られた周波数成分に基づいて車体の衝突側の側面の変形有無が判定される。
【0028】この発明によれば、1個の加速度センサからの出力のみで、監視対象となる車体側面に変形の有無を判定することができ、左右いずれか一方の車体側面のみに側方エアバッグを備え付けるような場合には、側面変形判定用の加速度センサが1個で済むことになる。
【0029】ここで、加速度変化に含まれる周波数成分の分析に必要とされる『過去所定時間』の時間長をどの程度に設定すべきかは、様々な観点から決定される。基本的には、『過去所定時間』に言う時間長は、側面衝突開始からどの程度の時間(衝突判定所要最大時間)内に乗員側方保護具(例えば、側方エアバッグ等)の作動が必要である旨の判定を完了せねばならないかに基づいて決定される。この衝突判定所要最大時間の値は、車体の構造(特に、側面の剛性等)や乗員側方保護具(例えば、側方エアバッグ等)の展開所要時間等により変動する。『過去所定時間』に言う時間長は、一般的には、5ms〜30ms程度の長さに設定することが好ましい。
【0030】また、前記車体側面に変形の有無の判定は、前記分析により得られる周波数成分を所定の判定論理に照らすことにより行なうことができる。この判定論理は、図1(I)(a)と図1(II)(a´)とに示される周波数成分の分布曲線の相違を前提として、イントルージョン(側面変形)の生じていない時間帯とイントルージョンの生じている時間帯とを確実に識別できるように意図されている。
【0031】判定論理の一例としては、前記分析により得られた周波数成分のうちの高域周数成分に着目するものを挙げることができる。すなわち、この判定論理では、高域周波数成分と基準値との比較結果に基づいて、車体側面に変形の有無が判定される。より具体的には、高域周波数成分が基準値よりも多い場合には車体側面に変形が生じているものと判定され、また高域周波数成分が基準値よりも少ない場合には車体側面に変形が生じていないものと判定される。
【0032】前記判定論理の他の一例としては、前記分析により得られた周波数成分のうちの低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と高域周波数成分との相対関係に着目するものを挙げることができる。すなわち、この判定論理では、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、高域周波数成分との、比較結果に基づいて、車体側面に変形の有無が判定される。この比較手法の一例では、前記分析により得られた周波数成分のうちの低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、高域周波数成分の比が、基準値よりも大きい場合には車体側面に変形が生じているものと判定され、また低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、高域周波数成分の比が、基準値よりも小さい場合には車体側面に変形が生じていないものと判定される。
【0033】以上2つの判定論理を特に例示したのは、これらの判定論理によれば、図1(I)(a)と図1(II)(a’)とに示される周波数成分の分布曲線の相違を前提とすると、車体側面に変形の生ずる場合と車体側面に変形の生じない場合とが明確に区別されるからである。
【0034】次に、マルチプルポイントタイプの発明について説明する。
【0035】この発明では、衝突による車体側面の変形と連動して変位する第1の車体部位に生ずる加速度、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に生ずる加速度が検出される。続いて、前記第1の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分、並びに、前記第2の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分がそれぞれ分析される。最後に、前記分析により得られた両周波数成分に基づいて車体側面の変形有無が判定される。
【0036】この発明によれば、衝突による車体側面の変形と連動して変位する第1の車体部位と実質的に変位しない第2の車体部位とからなる2箇所の車体部位に生ずる加速度を側面変形判定に利用しているため、より一層精度の高い側面変形判定結果を得ることができる。
【0037】ここで、前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位とすることができる。そのようにすれば、車体の左右両側面の変形を判定すべく、第1の車体部位を車体の軸線を挟んで左右対称的に配置した場合に、第2の車体部位を共通の一カ所で兼用することができる。加えて、第2の車体部位の加速度検出用のセンサを、従前からセンタトンネル上に配置されている前方エアバッグ用の加速度センサと共用すれば、別途加速度センサを備える必要がない。
【0038】また、前記第2の車体部位とは、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位とすることもできる。そのようによれば、車体の左右両側面の変形を判定すべく、第1の車体部位を車体の軸線を挟んで左右対称的に配置した場合に、それら2箇所の車体部位の一方が相互に第2の車体部位を兼ねることとなり、別途専用の第2の車体部位を設けることが不要となる。
【0039】さらに、前記第2の車体部位とは、車体の前後方向へ延びる軸線付近の点に位置する車体部位と、車体の前後方向へ延びる軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位との2箇所の部位として多重化することもできる。そのようによれば、全体として3個の加速度センサを用いてより信頼性の高い制御を実現できる。
【0040】ここで、前記車体側面の変形の有無の判定は、前記第1の車体部位に生ずる加速度の分析により得られる周波数成分と、前記第2の車体部位に生ずる加速度の分析により得られる周波数成分とを、所定の判定論理に照らすことにより行なうことができる。この判定論理は、図1(I)(a)と図1(I)(b),(c)との比較、並びに、図1(II)(a’)と図1(II)(b’),(c’)との比較から理解される周波数成分の分布の相違を前提として、イントルージョン(側面変形)の生じていない時間帯とイントルージョンの生じている時間帯とを確実に識別できるように意図されている。
【0041】前記判定論理の一例としては、前記第1の車体部位で検出された加速度の高域周波数成分と、前記第2の車体部位で検出された加速度の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との相対関係に着目したものを挙げることができる。すなわち、この判定論理では、前記第1の車体部位で検出された加速度の高域周波数成分と、前記第2の車体部位で検出された加速度の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面の変形の有無が判定される。比較手法の一例では、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定される。一方、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも大きい場合には、車体側面に変形が生じていないものと判定される。
【0042】前記判定論理の他の一例としては、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との相対関係に着目したものを挙げることができる。すなわち、この判定論理では、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面の変形の有無が判定される。比較手法の一例では、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定される。一方、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも大きい場合、もしくは両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定される。
【0043】前記判定論理の他の一例としては、前記第1の車体部位側の高域周波数成分と前記第2の車体部位側の高域周波数成分との相対関係に着目したものを挙げることができる。すなわち、この判定論理では、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の高域周波数成分との、比較結果に基づいて、車体側面の変形有無が判定される。比較手法の一例では、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の高域周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定される。一方、前記第1の車体部位側の高域周波数成分に対する、前記第2の車体部位側の高域周波数成分の比が、基準値よりも大きい場合、もしくは両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定される。
【0044】以上3つの判定論理を例示したのは、これらの判定論理によれば、図1(I)(a)と図1(I)(b),(c)との比較、並びに、図1(II)(a’)と図1(II)(b’),(c’)との比較から理解される周波数成分の分布の相違を前提とすると、車体側面に変形の生ずる場合と車体側面に変形の生じない場合とが明確に区別されるからである。
【0045】尚、本発明において、検出された加速度の周波数成分を分析する手法の一例としては、車体部位で検出された加速度を各種のフィルタによりフィルタリングすることにより目的とする周波数帯域を抽出し、その符号付きの値もしくは絶対値を所定区間に亘り積分するものを挙げることができる。
【0046】本発明において、車体側面の変形有無判定に必要とされる周波数成分同士もしくは周波数成分と所定値との比較は、それらの2値化信号のオンタイミング同士を時間的に比較することによっても行なうこともできる。そのようなオンタイミング同士の時間比較によれば、回路構成の簡素化、並びに、加速度データを直接にユニット間で伝送する場合に比べて、ノイズの影響を受けにくい利点がある。
【0047】このオンタイミング同士の時間比較の考え方を、シングルポイントタイプの発明に適用する場合には、衝突側の加速度検出ユニット内に、周波数成分2値化用の2値化手段が内蔵される。この場合、オンタイミング同士の時間比較を行なう判定手段の位置は、当該衝突側の加速度検出ユニット内でもよいし、例えば車体中央のセンタトンネル上に通常設けられる制御ユニット内でもよい。
【0048】判定手段における車体側面の変形有無判定は、一例としては、加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと所定の基準タイミングとの比較結果に基づいて行うことができる。
【0049】判定手段における車体側面の変形有無判定は、他の一例としては、加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと前記加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行うことができる。
【0050】一方、このオンタイミング同士の時間的比較の考え方を、マルチプルポイントタイプの発明に適用する場合には、衝突側並びに衝突側と反対側(含む中央)の加速度検出ユニットの双方に、周波数成分2値化用の2値化手段が内蔵される。
【0051】この場合、オンタイミング同士の時間的比較を行なう判定手段の位置は、衝突側並びに衝突側と反対側(含む中央側)の加速度検出ユニットのいずれでもよいし、それ以外のどこでもよい。
【0052】判定手段における車体側面の変形有無の判定は、一例としては、衝突側の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、衝突側と反対側(含む中央側)の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの、比較に基づいて行なうことができる。
【0053】判定手段における車体側面の変形有無の判定は、他の一例としては、衝突側の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングと、衝突側と反対側(含む中央側)の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの、比較に基づいて行なうことができる。
【0054】判定手段における車体側面の変形有無の判定は、他の一例としては、衝突側の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、衝突側と反対側(含む中央側)の加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングとの、比較に基づいて行なうことができる。
【0055】以上説明したシングルポイントタイプ、マルチプルポイントタイプ、並びに、オンタイミング時間比較タイプの変形有無判定装置は、車両用乗員保護具(例えば、側方エアバッグ等)の起動制御装置において、車体側面変形時適用の第1衝突判定系と車体側面非変形時適用の第2衝突判定系との切り換え制御に利用することができる。
【0056】
【発明の実施の形態】以下、この発明の好ましい実施の形態につき添付図面を参照して詳細に説明する。
【0057】[判定原理]先に説明したように、本発明者等は、加速度センサの出力に基づいて車体側面の変形、すなわち乗員を収容するキャビンの変形の有無を直接的に判定することができれば、前述した図25(a)の場合と図25(b)の場合とを容易に区別できるとの着想に基づき鋭意研究の結果、次のような知見を得た。
【0058】即ち、衝突による車体側面の変形と連動して変位する車体部位に取付けられた加速度センサの過去所定時間内における出力に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる時間帯と変形の生じない時間帯とでは、両周波数成分分布に一定の相関が見られる(第1の知見)。
【0059】また、衝突による車体側面の変形と連動して変位する第1の車体部位に取り付けられた加速度センサ、並びに、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に取り付けられた加速度センサの過去所定時間内における出力に含まれる周波数成分の分布に着目すると、車体側面に変形の生ずる時間帯と変形の生じない時間帯とでは、両センサ系の周波数成分分布には一定の相関が見られる(第2の知見)。
【0060】そして、これらの相関は、車体側面が衝突により変形する際に生ずる特有な周波数成分の有無に起因するものであると推定される。すなわち、イントルージョンは主に車両構成部材の変形量に起因する加速度信号中の低域周波数成分と車両構成部材の破断、圧壊等に起因する加速度信号中の高域周波数成分とを伴なうものと推定される。
【0061】図1には、このような知見の代表的なものとして、車体の衝突側の側面(車体衝突側側面:図5(b)の点P1)、車体の前後方向へ延びる中心軸線付近の部位(車体中央部:図5(b)の点P2)、並びに、車体の衝突側の側面と反対側の側面(車体反対側側面:図5(b)の点P3)のそれぞれに対応して取り付けられた3個の加速度センサの過去所定時間内における出力に含まれる周波数成分分布が、イントルージョンの生じていない時間帯(又は、イントルージョンの伴わない衝突)(I)と、イントルージョンの生じている時間帯(II)とでどの様に相違するかが示されている。
【0062】図1(I)(a)と図1(II)(a´)とを参照して明らかなように、イントルージョンが生じておらず車両の移動のみとなる時間帯(又は、イントルージョンを伴わない衝突の場合)(I)とイントルージョンが生じている時間帯(II)とで、車体衝突側側面に対応する加速度センサ出力の周波数成分の分布を比較すると、低域周波数成分については、両者(I)(II)間にさほど大きな差異は認められないのに対して、高域周波数成分については、前者(I)に比べて後者(II)の方が遙かに大きいことが認められる。換言すれば、後者(II)の場合には、加速度センサ出力の周波数成分は低域から高域に及ぶ幅広い周波数帯域に分布しているのに対して、前者(I)の場合には、低域に大きく偏って分布しており、高域周波数成分は殆ど存在しないことが認められる。このことからすると、車体の衝突側側面に対応する加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の含有量、もしくは、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する高域周波数成分の比と、車体側面のイントルージョンの有無との間には一定の相関があることが理解される。
【0063】次に、図1(I)(a)、同図(I)(b)、並びに、同図(I)(c)を参照して明らかなように、イントルージョンが生じておらず車両の移動のみとなる時間帯(又は、イントルージョンを伴わない衝突の場合)(I)における、車体衝突側側面、車体中央部、並びに、車体反対側側面のそれぞれに対応して取り付けられた3個の加速度センサの出力の周波数成分分布を相互に比較すると、いずれの周波数成分分布もほぼ同じであり、加速度信号の過去所定時間内に含まれる周波数成分は大きく低域に偏って分布しており、高域には殆ど存在しないことが認められる。換言すれば、車両の移動(並進運動、及び/又、回転運動)が加速度センサ出力の周波数成分に与える影響は主に低域に限って見られ、また車体のあらゆる箇所で同様に見ることができる。
【0064】また、図1(II)(a´)、図1(II)(b´)、並びに、図1(II)(c´)を参照して明らかなように、イントルージョンが生じている時間帯(II)における車体衝突側側面、車体中央部、並びに、車体反対側側面のそれぞれに対応して取り付けられた3個の加速度センサの出力の周波数成分分布を相互に比較すると、車体衝突側側面に対応する加速度センサの出力に含まれている高域周波数成分は、車体中央部もしくは車体の反対側側面に対応する加速度センサの出力には殆ど含まれていないことが認められる。加えて、各加速度センサの出力に含まれる低域周波数成分について見ると、車体中央部もしくは車体反対側側面の加速度センサの出力に含まれる低域周波数成分の値は、車体の衝突側側面の加速度センサの出力に含まれる低域周波数成分の値に比べてかなり小さいことが認められる。イントルージョンは主に車両構成部材の変形量に起因する加速度信号中の低域周波数成分と車両構成部材の破断、圧壊等に起因する加速度信号中の高域周波数成分とを伴なうものと推定される。そのため、イントルージョンが加速度信号中の周波数成分に与える影響は低域成分並びに高域成分の双方に見られる。但し、イントルージョンの影響が現れるのは、車体の変形領域に取り付けられた加速度センサの出力信号中に限られる。
【0065】これらのことからすると、
【0066】
【0067】次に、図2(a)と図2(b)とを参照して明らかなように、イントルージョンを伴う衝突の場合には、図2(a)に示されるように、イントルージョンが緩衝材の働きをなすことから、車体移動開始時点は実際の衝突時点よりも数ms程度だけ遅れる。そのため、車体衝突側側面に比べ、車体中央部もしくは車体反対側側面に対応する加速度センサの出力立ち上がりタイミングは車体衝突側側面に対応する加速度センサの出力立ち上がりタイミングよりも数ms程度だけ遅れることとなる。これに対して、イントルージョンを伴わない車両の移動のみの衝突の場合には、図2(b)に示されるように、車体全体で同時に車両移動が開始される。そのため、車体衝突側側面、車体中央部、並びに、車体反対側側面にそれぞれ対応する3個の加速度センサから出力される信号の立ち上がり時点はほぼ同時となる。
【0068】このことからすれば、車体衝突側側面に対応する加速度センサ出力の立ち上がりタイミングと車体中央部もしくは車体反対側側面に対応する加速度センサ出力の立ち上がりタイミングとの時間差と、車体側面にイントルージョンの有無との間にも、一定の相関があることが理解される。
【0069】[第1実施形態]次に、以上説明した種々の相関を利用して車体側面に変形の有無を判定する方法及び装置が適用された、側方エアバッグ起動制御装置の電気的な全体構成を図4のブロック図を参照して説明する。
【0070】同図から明らかなように、この側方エアバッグ起動制御装置100は、車両の左側の側面に対応して車体所定部位(例えば、図5(b)の点P1)に取付けられる車両左側ユニットLUと、車両の右側の側面に対応して車体所定部位(例えば、図5(b)の点P3)に取付けられるべき車両右側ユニットRUと、車両の車幅方向の中央(車両の進行方向へ延びる中心軸線近傍)の所定位置(例えば、図5(b)の点P2)に取付けられる車両中央ユニットCUとから構成されている。
【0071】これらユニットLU,RU,CUの取付け可能位置が、図5の車体構造図により示されている。同図(a)は側面から見た車体構造図であり、また同図(b)は上面から見た車体構造図である。
【0072】図において、14Lは左側Aピラー、15L,15Rは左側並びに右側のBピラー、16Lは左側Cピラー、17L,17Rは左側並びに右側のサイドシル、18Lは左側前ドアインナパネル、19Lは左側前ドアビーム、20はセンタトンネル、21は前席クロスメンバである。
【0073】先に説明したように、加速度センサを内蔵する車両左側ユニットLU並びに車両右側ユニットRUは、それぞれ車体右側面若しくは左側面の広範な領域に対する側面変形を検知し得るように比較的剛性の高い車体部位、すなわち衝突による車体側面の変形と連動して変位する車体部位に取付けられる。
【0074】『衝突による車体側面の変形と連動して変位する車体部位』としては、適用される車種並びにその構造に応じて様々な部位が考えられる。基本的には、衝突による車体側面の変形と連動して多少なりとも変位する領域(例えば、図5(b)にハッチングで概略的に示される領域)にある車体部位であればどこでも差し支えないわけであるが、その変位が比較的に大きいことが望ましいであろう。このような観点に立てば、図5(a)並びに図5(b)に示されるように、例えば車種としてセダンを想定すれば、このような車体部位としては、車両乗員室の側面周囲を縁取る左右のセンタピラー(Bピラー)15L,15R、左右のフロントピラー(Aピラー)14L、左右のリアピラー(Cピラー)16L、サイドルーフフレーム25等を挙げることができ、さらに車両乗員室の側面それ自体を構成するドア(ドアアウタパネルの内部、ドアインナパネル18L,24Lの内外、ドアビーム19L,23L等を含む)もその候補として挙げることができる。
【0075】もっとも、自転車等の軽量物の衝突やドア閉め等による誤判定回避を考慮した場合には、このような変形検出用の車体部位としての候補はより狭められるであろう。すなわち、この場合には、上述のセンタピラー15L,15R、フロントピラー14L、リアピラー16Lに関しては、フロアに近い下端部近傍が好ましく、中でも、乗員に近い部位の変形を監視するという観点と、車体前後の中間に位置すると言う観点からは、センタピラー15L,15Rの下端部近傍が最も好ましいと考えられる。
【0076】また、センタピラー15L,15Rとの剛性が高く、センタピラー15L,15Rの過大な変形応力を受けて変形することを考慮すれば、サイドシル17L,17Rもその候補として挙げることができる。このサイドシル17L,17Rに関しては、前部、前席クロスメンバ21の付け根付近、中央部、センタピラー15L,15Rの付け根付近、後席クロスメンバ22の付け根付近、後部等をその候補として挙げることができる。
【0077】また、サイドシル17L,17Rとの剛性が高いことを考慮すれば、前席並びに後席のクロスメンバ21,22もその候補として挙げることができる。このクロスメンバ21,22に関しては、最外端部から精々センタトンネル20までの中間位までの部位をその候補として挙げることができる。
【0078】さらに、フロアパネル(フロアパン)に関しても、最外端部から精々センタトンネル20までの中間位までの部位をその候補として挙げることができるであろう。
【0079】そして、このような部位に取り付けられた車両左側ユニットLU並びに車両右側ユニットRUに内蔵される加速度センサによれば、衝突により車体側面に生ずる変形並びに車両全体の移動の合成された加速度を比較的正確に検出することができる。
【0080】次に、図4に戻って、車両左側ユニットLU並びに車両右側ユニットRUは、それぞれ加速度センサ1L,1R、アンチエリアシングフィルタ2L,2R、AD変換器3L,3R、送信器4L,4Rを含んでいる。
【0081】加速度センサ1L,1Rとしては、例えばピエゾ抵抗変化を利用する応力歪みゲージを半導体基板上に組込んだ加速度センサ、静電容量型加速度センサ、圧電素子を用いた加速度センサ等のような種々の構造のものを採用することができる。なお、ここで必要な加速度の方向は主として車体側方であるが、センサそれ自体としては一つのセンサで二軸及び三軸の加速度を検出できるものを使用することもできる。
【0082】アンチエリアシングフィルタ2L,2Rは、AD変換に際する折り返し誤差を除去するためのものであり、種々の構成よりなる公知のフィルタ機能を利用することができる。
【0083】AD変換器3L,3Rは、アンチエリアシングフィルタ2L,2Rを介して供給される加速度センサ1L,1Rの出力を左右の離散値加速度データGsl(k)、Gsr(k)にAD変換するものであり、種々の構成よりなる公知のAD変換回路を採用することができる。
【0084】送信器4L,4Rは、このようにして得られた離散値加速度データGsl(k),Gsr(k)を、車両中央ユニットCUへと送信するためのものである。
【0085】一方、このようにして、車両左側ユニットLU,車両右側ユニットRUから送信された離散値加速度データGsl(k)、Gsr(k)は、車両中央ユニットCU側の受信機5L,5Rによって受信される。
【0086】送信器4L,4R並びに受信器5L,5Rとしては、例えば高速伝送用の専用通信プロトコルで結ばれた一対の専用ICを車両左側並びに右側ユニットLU,RUと車両中央ユニットCUとのそれぞれに搭載することで構成することができる。またこれ以外にも、例えばインタフエイス回路とマイクロコンピュータにより独自の通信プロトコルに基づいて通信を行う構成とすることもできる。
【0087】次に、受信器5L,5Rにて受信された離散値加速度データGsl(k)、Gsr(k)は、それぞれ3系統の信号に分岐される。
【0088】即ち、受信機5Lで受信された離散値加速度データGsl(k)は、側方エアバッグの起動要否を判定する起動要否判定部13へ直接に至る第1の系統と、バンドパスフィルタ6L,絶対値変換器7L,区間積分器8Lからなる左側高周波エネルギー抽出系(ここで言うエネルギーとは、周波数成分の含有量を意味する。)である第2の系統と、ローパスフィルタ9L,絶対値変換器10L,区間積分器11Lからなる左側低周波エネルギー抽出系である第3の系統に分岐される。
【0089】同様にして、受信機5Rから得られる離散値加速度データGsr(k)は、側方エアバッグの起動要否を判定する起動要否判定部13へ直接に至る第1の系統と、バンドパスフィルタ6R,絶対値変換器7R,区間積分器8Rからなる右側高周波エネルギー抽出系である第2の系統と、ローパスフィルタ9R,絶対値変換器10R,区間積分器11Rからなる右側低周波エネルギー抽出系である第3の系統とに分岐される。
【0090】左側高周波エネルギー抽出系を構成するバンドパスフィルタ6L並びに右側高周波エネルギー抽出系を構成するバンドパスフィルタ6Rは、図1を参照して説明したように、加速度センサ1L並びに1Rから出力される加速度信号の高域周波数成分を抽出するためのものであり、また左側低周波エネルギー抽出系を構成するローパスフィルタ9L並びに右側低周波エネルギー抽出系を構成するローパスフィルタ9Rは、図1を参照して説明したように、加速度センサ1L並びに1Rから出力される加速度信号の低域周波数成分をそれぞれ抽出するためのものである。なお、当業者であれば容易に理解されるであろうが、これらのフィルタ6L,6R,9L,9Rの機能は、マイクロコンピュータにてソフトウェア的に実現することができる。
【0091】これらのバンドパスフィルタ6L,6R並びにローパスフィルタ9L,9Rを介して抽出された信号は、続いてその後段に設けられた絶対値変換器7L,7R並びに10L,10Rによってその絶対値に変換され、更にその後段に設けられた区間積分器8L,8R並びに11L,11Rにより所定の積分時間(例えば、5ms〜30ms)をもって区間積分され、その結果、左側加速度センサ1L並びに右側加速度センサ1Rの出力のそれぞれについて、過去所定時間内の加速度信号(加速度変化)に含まれる高域周波数成分並びに低域周波数成分のエネルギーが抽出されることとなる。換言すれば、左側高周波エネルギー抽出系(6L,7L,8L)並びに左側低周波エネルギー抽出系(9L,10L,11L)により、左側加速度センサ1Lで検出された加速度の過去所定時間内における変化に含まれる周波数成分が分析される。同様にして、右側高周波エネルギー抽出系(6R,7R,8R)並びに右側低周波エネルギー抽出系(9R,10R,11R)により、右側加速度センサ1Rで検出された加速度の過去所定時間内における変化に含まれる周波数成分が分析される。なお、当業者であれば容易に理解されるであろうが、絶対値変換器7L,7R,10L,10Rの機能、並びに、区間積分器8L,8R,11L,11Rの機能についても、マイクロコンピュータにてソフトウェア的に実現することができる。
【0092】そして、このようにして区間積分器8L、8Rから出力される高域周波数成分エネルギーは、側面変形有無判定部12の該当する入力端子fHL,fHRへと供給され、同様にして区間積分器11L,11Rから出力される低域周波数成分エネルギーは側面変形有無判定部12の該当する入力端子fLL,fLRへと供給される。
【0093】なお、上述の回路構成において、バンドパスフィルタ(BPF)6L,6Rの高域カット側(340Hz)が、アンチエリアシングフィルタ2L,2Rのカットオフと同一ならば、バンドパスフィルタ(BPF)6L,6Rの代わりにハイパスフィルタ(HPF)を使用して低域カットのみを行うようにすれば、ソフト処理の負担を軽減することもできる。ハイパスフィルタ(HPF)の機能は、例えば、前方もしくは後方差分やシンプソンの微分定理等の各種微分系演算アルゴリズムでも代用することができる。また、特に、低域周波数成分の抽出に絶対値変換器10L,10Rを使用しない場合には、判定したい衝突方向の低域成分にのみ着目することができる。
【0094】図6に示されるように、上述の回路構成において、加速度信号の低域周波数成分を抽出するローパスフィルタ9L,9R並びに高域周波数成分を抽出するバンドパスフィルタ6L,6Rの周波数特性は例えばつぎのように設定することができる。
【0095】すなわち、低域周波数成分としては、例えばDCから160Hz(−3dB)程度の範囲の帯域の周波数成分を使用することができる。もっとも、本発明者等によりある車両における実験で確認されたところでは、本発明の側面変形判定において、低域周波数成分として重要なことは、車体側面の変形と特に強い相関のあるDC付近の周波数成分、例えば、10Hz(−3dB)程度の周波数成分を確実に含んでいることであることが判明している。
【0096】してみると、低域周波数成分として重要なことは、少なくともDC付近の周波数成分が含まれていることにあり、DC付近の周波数成分が含まれている限りにおいては、その上限周波数をどこまでにするかについてはさほど重要な要件ではないと考えられる。なお、本発明者等による実験において、低域周波数成分の上限を高めの周波数である160Hz(−3dB)としているのは、フィルタリングにより帯域抽出する場合に、フィルタの位相遅れにより応答速度が遅くならないようにするための配慮に過ぎない。
【0097】同様にして、高域周波数成分としては、160Hz(−3dB)から340Hz(−3dB)程度の範囲の帯域の周波数成分を使用することができる。もっとも、本発明者等によりある車両における実験で確認されたところでは、本発明の側面変形判定において、高域周波数成分として重要なことは、低域周波数成分として抽出されるDC付近の周波数成分、例えば10Hz程度の周波数成分を含んでいないことであることが判明している。
【0098】なお、本発明者等による実験において、高域周波数成分の下限を160Hzとしているのは、10Hz程度の周波数成分を除外するにはこれで十分だという理由に過ぎない。
【0099】してみると、高域成分として重要なことは、少なくともDC付近の周波数成分、好ましくは、10Hz程度までの周波数成分を含んでいないことであり、それらの周波数成分が含まれていない限りにおいては、その上限を制限する積極的な理由は存在しない。
【0100】もっとも、本発明者等の実験においては、高域周波数成分に340Hzと言う上限を設けているが、これは加速度センサを内蔵するユニットが取り付けられる相手方部材(サイドシル等)やその取付ブラケットの固有振動数をカット(共振による不確定要素のカット)したり、加速度データをA/D変換して離散化する際に、エリアシング誤差による影響を排除する必要があるからに過ぎない。
【0101】実際、車体側面の変形を伴う衝突の場合には、1KHz以上にまで高域周波数成分は発生(発散)する以上、上述の共振カット及びエリアシング誤差排除の必要がないのであれば、高域周波数成分の上限を340Hzに制限する積極的な理由は存在しない。
【0102】なお、高域周波数成分の上限を340Hzよりも高く設定することができるのであれば、それにつれて高域周波数成分の下限も160Hzよりも高く設定することができる。このように、高域周波数成分は側面変形判定の観点からはかなり広い範囲で自由に周波数設定することができるが、実際には、センサ取付上の問題等のために上限側に制限があり、それにつれて下限側の周波数も制限されることとなる。
【0103】次に、本発明の要部である側面変形有無判定部12の機能について説明する。側面変形有無判定部12は、車両左側ユニットLUに含まれた加速度センサ1Lで検出される加速度信号の周波数分析結果に相当する周波数成分(fLL,fHL)並びに車両右側ユニットRUに含まれる加速度センサ1Rで検出された加速度信号の周波数分析結果に相当する周波数成分(fLR,fHR)に基づいて、車体右側側面もしくは車体左側側面に変形(イントルージョン等)が生じたか否かを判定するものである。この判定は、マイクロコンピュータによりソフトウェア的に実現することができる。
【0104】より具体的には、側面変形有無判定部12は、区間積分器8Lから得られる左側高域周波数成分エネルギ(fHL)と、区間積分器11Lから得られる左側低域周波数成分エネルギ(fLL)と、区間積分器8Rから得られる右側高域周波数成分エネルギ(fHR)と、区間積分器11Rから得られる右側低域周波数成分エネルギ(fHR)とに基づいて、車体の右側面もしくは左側面に変形(イントルージョン)が生じたか否かを判定する。
【0105】先に説明したように、この判定のアルゴリズムは、本発明者等が発見した周波数成分分布の相関(図1並びに図2参照)、即ちイントルージョンを伴う側面衝突の場合とイントルージョンを伴わない車両移動のみからなる側面衝突の場合とでは、加速度センサで検出される加速度信号の所定時間内に含まれる周波数成分分布に固有の特徴がみられるとする相関、を利用して行われる。
【0106】具体的な判定のアルゴリズムとしては、どの加速度センサを使用するかにより、(1)衝突側側面に対応して取付けられた加速度センサのみを用いる場合(シングルポイントタイプ)、(2)衝突側側面に対応して取付けられた加速度センサと衝突側側面と反対側の側面に対応して取付けられた加速度センサの双方を使用する場合(マルチプルポイントタイプ1)、(3)衝突側側面に対応して取付けられた加速度センサといずれの側面にも属さない位置(例えば、車幅方向の中央のセンタトンネルの上部)に取付けられた加速度センサの出力を用いる場合(マルチプルポイントタイプ2)の3通りが考えられる。なお、便宜上、以下の説明では、衝突側の側面とは車体の左側の側面とする。
【0107】衝突側の側面に取付けられた加速度センサの出力のみを用いて行われる側面変形判定(シングルポイントタイプ)は、前記の分析により得られた周波数成分(fLL,fHL)を所定の判定論理に照らすことにより行われる。
【0108】判定論理の一例としては、前記分析により得られた周波数成分における高域周波数成分(fHL)に着目したものが挙げられる。この判定論理では、高域周波数成分(fHL)が基準値よりも多い場合には車体側面に変形が生じているものと判定され、また高域周波数成分(fHL)が基準値よりも少ない場合には車体側面に変形が生じていないものと判定される。
【0109】判定論理の他の一例としては、前記分析により得られた周波数成分における高域周波成分(fHL)と、低域周波成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)との双方に着目したものが挙げられる。この判定論理では、両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、両者の比(fHL/fLL、もしくは、fHL/(fLL+fHL))が基準値よりも大きい場合には車体側面に変形が生じているものと判定され、また両者の比(fHL/fLL、もしくは、fHL/(fLL+fHL))が基準値よりも小さい場合には車体側面に変形が生じていないものと判定される。
【0110】これらの判定論理は、図1(I)(a)と図1(II)(a´)との比較から明らかなように、衝突による車体側面の変形と連動して変位する車体部位で検出される加速度信号の所定時間内に含まれる周波数成分に着目すると、イントルージョンを伴わない側面衝突の場合に比べ、イントルージョンを伴う側面衝突の場合の方が、高域周波数成分の含有量が多いと言う知見に基づくものである。なお、フローチャートによる図示は省略するが、これらの判定論理に必要とされるデジタルコンパレータ機能は、当業者であれば、マイクロコンピュータのソフトウェアにより容易に実現できるはずである。
【0111】次に、車体の左右両側面のそれぞれに対応して取付けられた2個の加速度センサの双方を用いて行われる側面変形判定(マルチプルポイントタイプ1)は、前記の分析により得られた左側系並びに右側系の両周波数成分(fLL,fHL、並びに、fLR,fHR)を所定の判定論理に照らすことにより行われる。
【0112】このような判定論理の一つ(以下、第1の判定論理と言う)としては、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分(fHL)と、衝突側と反対側の加速度センサで検出された加速度信号に含まれる低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)とに着目するものを挙げることができる。この第1の判定論理では、上記着目される両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、衝突側の高域周波数成分(fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR/fHL、又は、(fLR+fHR)/fHL)が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定され、また衝突側の高域周波数成分(fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR/fHL、又は、(fLR+fHR)/fHL)が、基準値よりも大きい場合には、車体側面に変形の生じていないものと判定される。
【0113】このような判定は、図1(I)(a)と図1R>1(II)(a´)との比較から明らかなように、衝突側の側面の加速度センサから求められた高域周波数成分に着目すると、その含有量はイントルージョンを伴わない側面衝突の場合(I)よりもイントルージョンを伴う側面衝突の場合(II)の方が多いいことに加え、図1(I)(c)と図1(II)(c´)との比較から明らかなように、衝突側と反対側の側面に取付けられた加速度センサの低域周波数成分に着目すると、その含有量はイントルージョンを伴わない側面衝突の場合よりもイントルージョンを伴う側面衝突の場合の方が少ないと言う知見に基づくものである。
【0114】このように衝突側の高域周波数成分(fHL)と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)とに着目した判定は、より具体的には、それら成分エネルギをそれぞれ直交2軸とする2軸平面上の特定領域との比較により、或いは、それら周波数エネルギー成分の比(fLR/fHL、又は、(fLR+fHR)/fHL)を特定の閾値と比較するにより行うことができる。なお、フローチャートによる図示を省略するが、これらの比較処理は、当業者であれば、マイクロコンピュータのソフトウェアにより容易に実現できるはずである。
【0115】反対側側面における低域周波数成分エネルギ(fLR)をX軸、衝突側側面における高域周波数成分エネルギ(fHL)をY軸とする2軸平面上において、衝突側側面に変形が生じたか否かを判定するようにした一例が図7に示されている。
【0116】同図において、aは車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こしたような場合における2軸平面上の値を示す曲線、bはオフセット側面衝突を起こした場合における2軸平面上の値を示す曲線、cは斜め側面衝突を起こした場合における2軸平面上の値を示す曲線、dは側面衝突を起こした場合における2軸平面上の値を示す曲線、eは側面に変形の有無を判定するために選ばれた所定傾きの閾値角度直線である。
【0117】そして、2軸平面上の座標値がX軸と閾値角度直線eとに挟まれる図中斜線で縁取られた領域に存在する場合には、衝突側側面には変形(イントルージョン等)が生じないものと判定される。これに対して、2軸平面上の値が、Y軸と閾値直線eとで挟まれる領域に存在する場合には、衝突側側面には変形(イントールジョン等)が生ずるものと判定される。
【0118】このような前提の基に各曲線a,b,c,dを観察すると、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こした場合には、曲線aが斜線で囲まれた領域に存在することから、衝突側側面には変形(イントルージョン等)が生じないものと判定される。また、オフセット側面衝突の場合にも、曲線bが斜線で囲まれた領域に存在することから、衝突側側面には変形が生じないものと判定される。これに対して、斜め側面衝突を起こしたような場合には、曲線cが斜線で囲まれた領域に存在しないことから、衝突側側面に変形(イントルージョン等)が生ずるものと判定される。また、車両側面衝突の場合にも、曲線dが斜線で囲まれた領域には存在しないことから、衝突側側面に変形が生ずるものと判定される。
【0119】このように、車両の左右両側の2個の加速度センサから何らかの信号が得られた場合、衝突側の高域周波数成分エネルギ(fHL)と反対側の低域周波数成分エネルギ(fLR)とをこの2軸平面上にプロットして、その座標値が閾値角度直線eを境にしてどちらの領域に存在するかを確認することにより、その衝撃に伴い衝突側側面に変形の有無を的確に判定することができるのである。
【0120】次に、前述した図7の2軸平面を閾値角度直線にて領域分けした例を、図8を参照して、周波数成分比/時間軸・座標上で説明する。図7の2軸平面の閾値角度直線eにての領域分けは、図8においては、衝突側高域周波数成分エネルギ(fHL)と反対側低域周波数成分エネルギ(fLR)との比(fLR/fHL)を閾値直線eと比較することに相当する。
【0121】尚、同図において、aは車両が横移動して縁石斜め跳ね返りを起こしたり、縁石側面衝突を起こした場合の値を示す曲線、bはオフセット側面衝突を起こした場合の値を示す曲線、cは斜め側面衝突を起こした場合の値を示す曲線、dは側面衝突を起こした場合の値を示す曲線、eは衝突側側面に変形の有無を判定するための閾値直線である。そして、座標値がこの閾値直線eよりも上側の領域に存在する場合、衝突側側面には変形が生じていないと判定される。
【0122】このような前提の基に各曲線a,b,c,dを観察すると、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こしたような場合には、曲線aが閾値直線eよりも上側の領域に存在することから、衝突側側面には何等変形(イントルージョン等)が生じないと判定される。
【0123】また、車両がオフセット側面衝突を起こしたような場合には、衝突直後の僅かの期間(10〜20ms)に限り曲線bは閾値直線eよりも下側に存在するものの、それを過ぎた後は閾値曲線eよりも上側に存在する。そのため、衝突直後僅かの時間で、衝突側側面に変形の生じないことが判定される。
【0124】これに対して、車両が斜め側面衝突を起こしたような場合には曲線cが閾値直線eよりも下側の領域に存在することから、衝突側側面に変形(イントルージョン等)が生じているものと判定される。
【0125】更に、車両が側面衝突を起こしたような場合にも、曲線dが比較的長期の期間(40〜50ms)の間、閾値直線eよりも下側の領域に存在することから、衝突側側面に変形が生ずるものと判定される。
【0126】このように、それら二つの周波数成分エネルギの比の時間的推移を追うことにより、当該衝撃により衝突側側面に変形(イントルージョン等)の有無を的確に判定することができるのである。
【0127】図9並びに図10には、図5(b)に示される衝突側の側面の点P1に取り付けられた加速度センサと図5(b)に示されるその反対側の点P3に取り付けられた加速度センサとを用いて実際に判定を行なった結果が示されている。図9には側面変形を伴う衝突を判定した場合の結果が、また図10には側面変形を伴わない衝突を判定した場合の結果が示されている。
【0128】図9並びに図10において、aは衝突側の側面における高域周波数成分エネルギ(fHL)、bは反対側の側面における低域周波数成分エネルギ(fLR)、cはそれら2つの周波数成分エネルギの比(fLR/fHL)、dは側面変形の有無を判定するためのしきい値直線を示している。
【0129】図9に示されるように、側面変形を伴う衝突の場合には、曲線cに示される両者の比(fLR/fHL)は、直線dに示されるしきい値TH1よりも十分に低い値に維持されており、これにより側面変形を伴う衝突である旨の判定が行われる。
【0130】これに対して、図10に示されるように、側面変形を伴わない衝突の場合には、曲線cに示される両者の比(fLR/fHL)は衝突直後に急峻に立ち上がり、ただちに直線dに示されるしきい値TH1を越えるためこれに基づき側面変形を伴わない衝突である旨の判定が行われる。
【0131】図10において丸で囲まれたA部に示されるように、衝突初期の2つの周波数成分エネルギ(fHL,fLR)が未だ小さい時、曲線cに示される両者の比(fLR/fHL)は不安定となり、直線dに示されるしきい値TH1を越えない。この問題は加速度に基づいて演算される何らかの量(例えば周波数成分エネルギや区間積分等)が既定値以上になるまで判定を行わない手法や、一方の周波数成分エネルギに予め設定した定数を加えることで比を安定させる手法で簡単に回避することができる。
【0132】次に、車両の左右両側のそれぞれに取付けられた2個の加速度センサの双方の出力を用いて、衝突側側面に変形の有無を判定するための判定論理の他の一つ(以下、第2の判定論理と言う)について説明する。
【0133】この第2の判定論理では、衝突側の加速度センサで検出された加速度信号に含まれる低域周波数成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)と、衝突側と反対側の加速度センサで検出された加速度信号に含まれる低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)とのそれぞれに着目される。この第2の判定論理では、上記着目される両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、衝突側の低域周波数成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR(又は、fLR+fHR)/fLL(又は、fLL+fHL))が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定され、また衝突側の低域周波数成分(fLL)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLL+fHL)に対する、衝突側と反対側の低域周波数成分(fLR)もしくは低域を含むより広い所定帯域の周波数成分(例えば、fLR+fHR)の比(fLR(又は、fLR+fHR)/fLL(又は、fLL+fHL))が、基準値よりも大きい場合、もしくは両周波数成分がほぼ等しい場合(fLR(又は、fLR+fHR)≒fLL(又は、fLL+fHL))には、車体側面に変形が生じていないものと判定される。
【0134】このような判定は、図1(I)(a),(c)と図1(II)(a´),(c´)との比較から明らかなように、両加速度センサ出力の低域周波数成分エネルギーに着目すると、イントルージョンを伴う側面衝突の場合(II)には、衝突側に比べ反対側の低域周波数成分が大きく減衰するするのに対し、イントルージョンを伴わない車両移動のみによる側面衝突の場合(I)には、衝突側の低域周波数成分に対して反対側の低域周波数成分はほとんど減衰しないと言う知見に基づくものである。
【0135】次に、車両両側のそれぞれに取付けられた2個の加速度センサの双方の出力を用いて、衝突側側面に変形の有無を判定するための判定論理のさらに他の一つ(以下、第3の判定論理と言う)について説明する。
【0136】この第3の判定論理では、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分(fHL)と、反対側の加速度センサで検出された加速度信号に含まれる高域周波数成分(fHR)とのそれぞれに着目される。この第3の判定論理では、上記着目される両者の比較結果に基づいて、車体側面に変形の有無が判定される。比較手法の一例では、衝突側の高域周波数成分(fHL)に対する、衝突側と反対側の高域周波数成分(fHR)の比(fHR/fHL)が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定され、また衝突側の高域周波数成分(fHL)に対する、反対側の高域周波数成分(fHR)の比(fHR/fHL)が、基準値よりも大きい場合もしくは両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定される。
【0137】このような判定は、図1(I)(a),(c)と図1(II)(a´),(c´)との比較から明らかなように、両加速度センサ出力の高域周波数成分エネルギーに着目すると、イントルージョンを伴う側面衝突の場合には衝突側に比べ反対側の高域周波数成分が大きく減衰するするのに対し、イントルージョンを伴わない車両移動のみによる側面衝突の場合には、衝突側の高域周波数成分に比べて反対側の高域周波数成分はほとんど減衰しないと言う知見に基づくものである。
【0138】以上説明したように、車両両側のそれぞれに取付けられた加速度センサの双方を利用して、第1乃至第3の判定論理のいずれかを適用することにより、衝突側側面の変形(イントルージョン等)有無を的確に判定することができる。
【0139】ここで、図1並びに図2に示される相関を再度検討すると、イントルージョンを伴う側面衝突の場合とイントルージョンを伴わない側面衝突の場合とで周波数成分分布に相違が生ずるのは、衝突側側面のセンサ取付け部位と反対側側面のセンサ取付け部位とが振動系として実質的に断絶されていることに起因すると推定される。してみれば、反対側とされる加速度検出部位としては、衝突側センサ取付け部位と振動系的に断絶されていれば足り、それが断絶されている限り、車幅方向における両側壁の間の任意の部位を選択できるはずである。このことは、車体中央部に対応する周波数成分分布を示す図1(I)(b),図1(II)(b´)と車体反対側側面に対応する周波数分布を示す図1(I)(c),図1R>1(II)(c´)とがほぼ同一の波形を有することからも明らかである。
【0140】このような観点からすれば、今まで説明してきた第1乃至第3の判定論理における『反対側の加速度センサ』は、車両中央(例えば図5(b)に示されるセンタートンネル20内の点P2)に取付けられた加速度センサと置き換えることができる(マルチポイントタイプ2)。
【0141】すなわち、このような置き換えが行われた第1の判定論理は、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分と、車体中央部の加速度センサで検出された加速度信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。ここで、比較手法の一例では、衝突側の高域周波数成分に対する、車体中央部側の低域周波数もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定し、かつ衝突側の高域周波数成分に対する、車体中央部側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が基準値よりも大きい場合には、車体側面に変形の生じていないものと判定するものである。
【0142】同様な置き換えが行われた第2の判定論理は、衝突側の加速度センサで検出された加速度信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、車体中央部の加速度センサで検出された加速度信号の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。ここで、比較手法の一例では、衝突側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、車体中央部側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも小さい場合には車体側面に変形が生じているものと判定し、かつ衝突側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分に対する、車体中央部側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の比が、基準値よりも大きい場合、もしくは、両周波数成分がほぼ等しい場合には車体側面に変形が生じていないものと判定するものである。
【0143】同様な置き換えが行われた第3の判定論理は、衝突側の加速度センサで検出された加速度信号に含まれる高域周波数成分と車体中央部の加速度センサで検出された加速度信号に含まれる高域周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。ここで、比較手法の一例では、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定し、かつ、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分のの比が基準値よりも大きい場合、もしくは、両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定するものである。
【0144】そして、これらの置き換えが行われた判定論理によれば、車体の左右両側面の変形を判定すべく、2個の加速度センサを車体の中心軸線Xを挟んで左右対称的に配置した場合に、これらと対比されるべき非変形側の加速度センサが共通の1個で済み、これを従前からセンタトンネル20上に配置されている前方エアバッグ起動用の加速度センサと共用すれば、側面変形不感応センサのために別途加速度センサを備える必要がない。もっとも、この場合には、車両中央ユニット内には、少なくとも車両前後方向と車幅方向の2つの方向を検出できる1つの加速度センサ、若しくは、それぞれの方向軸に1つずつ加速度センサが必要とされるであろう。
【0145】ところで、車両衝突側の加速度センサと車両中央部の加速度センサとを使用する場合のように、車両中心軸線Xに対して非対称に配置された2個の加速度センサを使用して本発明を実施する場合には、衝突により車両が回転する影響を考慮することが好ましい。
【0146】図5(b)に示されるように、車体中心軸線Xに対して対称的な車両両側の2点(P1とP3)に取り付けられた2個の加速度センサを用いる場合と、車体の衝突側の側面の点P1と車幅方向中央の重心Gよりも僅かに後方の点P2に取り付けられた(車体中心軸線に対して非対称に配置された)2個の加速度センサを用いる場合とで、車体に回転が生ずる場合にどのような影響が現れるかを理論的に比較検討する。
【0147】今仮に、側面衝突により矢印Aに示されるように、車体が反時計回りに回転したものと想定する。この場合、回転に伴なう加速度Fは、点P1と点P3とに関しては重心Gからの距離が等しいために等しくなり、その車幅方向の成分F1とF3とは等しくなる。すなわち、この場合には、車両の回転が点P1と点P3とに取り付けられた加速度センサに与える影響は均等なものとなる。
【0148】これに対して、点P1に生ずる加速度による車幅方向成分F1と点P2に生ずる加速度F2とを比較すると、重心Gからの距離が異なることから、F1よりもF2の方が小さいことが判る。すなわち、この場合、点P1に取り付けられた加速度センサと点P2に取り付けられた加速度センサとでは、回転に伴う影響が均等には生じないことが判る。
【0149】実際、このことは、図3(I)並びに図3(II)に示されるように、車体中央部並びに車体反対側側面に対応して取り付けられた加速度センサの出力の周波数分布にも現れている。
【0150】車体前部右側面にオフセット側面衝突したことにより車体前部が衝突側と反対側に大きく移動する(振られる)ように車体が反時計回りに回転した場合における各加速度センサ(衝突側、中央部、反対側)の出力の周波数成分分布が図3(I)に示されている。また、車体後部右側面にオフセット側面衝突したことにより車体後部が衝突側と反対側に大きく移動する(振られる)ように車体が時計回りに回転した場合における各加速度センサ(衝突側、中央部、反対側)の出力の周波数成分分布が図3(II)に示されている。なお、図3(I)と図3(II)に示されるいずれのオフセット側面衝突の周波数分布も、衝突直後の僅かな変形が収まった時間後の分布を示している。
【0151】それら2つの図(図3(I),(II))に示される実験結果の比較から明らかなように、車体衝突側と車体反対側のように車両重心からほぼ等距離の位置に取り付けられた2個の加速度センサの出力には、車両の回転による影響がほぼ均等に現れていることが認められる。これに対して、車体衝突側と車体中央部のように車両重心からの距離が異なる位置に取り付けられた2個の加速度センサの出力には、車両の回転による影響が均等に現れていないことが認められる。より詳細に観察すると、図3(I),(II)にハッチングで示されるように、車両中央部に取り付けられた加速度センサの出力信号に含まれる低域周波数成分は、回転態様の相違に応じて大きく変動することが認められる。なお、この場合であっても、高域周波数成分については、回転態様の相違に拘わらず、ほとんど変動しないことは注意に値する。
【0152】図5(b)を参照して行った理論的検討、並びに、図3(I),(II)に示された実験結果によれば、側面衝突による車体回転をも考慮するのであれば、比較対照されるべき2個の加速度センサとしては、車体衝突側の加速度センサ(例えば、図5(b)の点P1)と車体反対側の加速度センサ(例えば、図5(b)の点P3)、すなわち車体中心軸線に対して対称的に配置された2個の加速度センサ、を採用することが好ましいことが理解される。
【0153】もっとも、図5(b)の点P3にセンサユニット取付スペースが存在しなかったり、或いは、衝突検知対象となる側面が車体の片方の側面だけであることから点P3にセンサユニットが存在しないこと等から、比較対照されるべき2個の加速度センサとして、車体衝突側の加速度センサ(例えば、図5(b)の点P1)と車体中央部の加速度センサ(例えば、図5(b)の点P2)、すなわち車体中心軸線に対して非対称的に配置された2個の加速度センサ、を採用せざるを得ない場合も存在するであろう。このような場合には、先に述べた3つの判定論理の中で最も車体回転の影響を受けにくい第3の判定論理を採用することが好ましい。すなわち、この第3の判定論理が採用された車体側面変形判定は、衝突側の加速度センサ(例えば、図5(b)のP1点)で検出された加速度信号に含まれる高域周波数成分と車体中央部の加速度センサ(例えば、図5(b)のP2点)で検出された加速度信号の高域周波数成分とのそれぞれに着目し、両者の比較結果に基づいて、車体側面に変形の有無を判定するものである。比較手法の一例としては、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分の比が、基準値よりも小さい場合には、車体側面に変形が生じているものと判定し、かつ、衝突側の高域周波数成分に対する、車体中央部側の高域周波数成分の比が基準値よりも大きい場合、もしくは、両周波数成分がほぼ等しい場合には、車体側面に変形が生じていないものと判定するものである。
【0154】このような判定は、図1(I),図1(II),図3(I),図3(II)の比較から明らかなように、両加速度センサ出力に含まれる所定時間内の高域周波数成分エネルギに着目すると、イントルージョンを伴う時間帯の場合には、衝突側に比べ車体中央部の高域周波数成分エネルギは車体回転の有無に拘わらず大きく減衰するのに対し、イントルージョンを伴わない車両移動のみの時間帯の場合には、衝突側に比べ車両中央部の高域周波数成分エネルギは車体回転の有無に拘わらずほとんど減衰しないという相関を逆に利用したものである。
【0155】上述の車体衝突側並びに車体中央部の加速度センサ(非対称配置)を使用しかつ第3の判定論理(高域相互比較)を適用する変形有無判定手法は、車体が回転する場合のみならず、図3(III)に示されるように、車両の構造が強化された場合(剛性の高い車体の場合)にも都合がよいことが知見されている。車両の構造が強化されると変形量が減り車両全体の移動量が増えていく傾向がある。このため、変形の生じている時間帯の低域周波数成分は、図3(III)にハッチングで示されるように、車体衝突側、車体中央部、車体反対側で差が小さくなり、変形が生じている特徴は高域周波数成分にしか現れなくなる。このような場合にあっても、上述の高域相互比較を行う変形有無判定手法によれば、変形有無で差のつきづらくなった低域周波数成分を判定要素としないため、信頼性の高い判定結果を得ることができる。
【0156】なお、上述の第1〜第3判定論理における2つの周波数成分の比の比較のためには、先に図7を参照して説明した2軸平面を閾値角度直線にて領域分けする手法や図8を参照して説明した両者の比をしきい値直線と比較するものに限らず、種々の手法を採用することができる。その他の手法の例としては、衝突側高周波域成分エネルギと反対側低周波域成分エネルギの関数を基準値と比較することに相当する閾値曲線によって領域分けする手法や、衝突側高周波域成分エネルギの基準値比較と反対側低周波域成分エネルギの閾値比較を双方で行い、結果を論理演算で構成したいわゆる四角型の領域分け手法等を挙げることができる。
【0157】次に、図4に戻って、側面変形判定部12の左側判定出力S1L並びに右側判定出力S1Rが、起動要否判定部13においてどのように利用されるかの一例を説明する。
【0158】側面変形有無判定部12から出力される左右の判定出力S1L並びにS1Rはそれぞれ例えば2値信号であって、“1”は側面変形ありを、また“0”は側面変形なしを示している。
【0159】一方、起動要否判定部13は、従来一般的な構成のものを使用することができ、すなわち先に説明したように、離散値加速度データGsl(k)並びにGsr(k)を、それぞれ1若しくは2以上の積分時間をもって区間積分することにより得られた速度変化量に基づいて、各種の衝突態様を判定し、それが側方エアバッグの起動を必要とするものか否かを判定するものである。このような起動要否判定部の具体的な構成については、公知文献に基づき当業者において容易に理解されるであろうから詳細な説明は省略する。尚、S2L,S2Rは、それぞれ左右の側方エアバッグ起動信号である。
【0160】そして、特に、この起動要否判定部13においては、側面変形有無判定部12からの判定出力S1L並びにS1Rが側面変形なしを示す場合には、これを縁石側面衝突やオフセット側面衝突等の乗員室側面にイントルージョンがない側面衝突であるとみなして、起動要否判定部13内部の判定閾値を切り替えたり、積分時間や判定論理の構成自体を切り替えたりする。これにより、イントルージョンのない車両横移動となる衝突態様にあることを考慮に入れつつ、乗員傷害危険度に合わせて、側方エアバッグの起動要否を判定することができる。
【0161】そのため、この側方エアバッグ起動制御装置100にあっては、乗員に影響のない低速縁石側面衝突や低速オフセット側面衝突に起因して衝突直後の短時間に急峻な速度変化が観察されたとしても、側面変形有無判定部12から側面変形なしを示す判定出力が得られることにより、側方エアバッグシステムの不要な作動を未然に防止することができる。また、側面変形の生じない移動のみとなる衝突態様であっても、乗員が傷害を受ける虞がある中高速縁石側面衝突や中高速オフセット側面衝突の場合にあっては、そのような衝突態様に合わせた適正なエアバッグ起動判定手法を採用することにより、乗員を傷害から確実に保護することができる。
【0162】なお、以上の説明からも明らかなように、本願発明の要旨とするところは、加速度信号に含まれる過去所定時間内の周波数成分を分析することにある。この分析手段として、図4に示される実施例の場合には、いわゆるフィルタリングによる周波数抽出手法が採用されているが、これは単に周波数成分分析手法の一例に過ぎないものとと理解されるべきである。このような周波数分析手法としては、フィルタリングによる周波数抽出のみならず、いわゆる時間窓移動FFT等のように公知の種々の手法が適用できることは当業者であれば当然に理解されるはずである。
【0163】また、本願に含まれる発明の中で、複数の周波数成分分析結果に基づいて側面変形の有無を判定するものにあっては、原加速度信号若しくはそれを処理した信号のいずれかを演算処理のために一カ所に伝送することが必要となる。この伝送手段として、図4に示される実施例の場合には、加速度信号のデジタル伝送技術が採用されているが、これは単に伝送手法の一例に過ぎないものと理解されるべきである。このような伝送手法としては、加速度信号のアナログ伝送としたり、個々の側面ユニットにて演算した結果を一カ所に伝送したり、あるいはその伝送媒体として光ファイバを使用したり、と言ったような変形は当業者であれば容易に理解されるはずである。
【0164】さらに、以上の実施の形態では、衝突側側面の加速度センサの出力と比較されるべきものは、反対側の側面の加速度センサ若しくは車体中央付近の加速度センサのいずれか一方のセンサ出力としているが、これを双方のセンサ出力と比較するように構成すれば、より一層信頼性の高い判定論理を構成できることは言うまでもないことである。すなわち、衝突側の側面の加速度センサ(A)からの周波数分析結果(演算値)に対して、車両中央付近の加速度センサ(B)と衝突側の側面と反対側の側面の加速度センサ(C)の周波数分析結果を双方個別に対応させることにより、例えば、衝突側の側面の加速度センサ(A)と車両中央付近の加速度センサ(B)の周波数分析結果の組み合わせによる判断結果(J1)と、衝突側の側面の加速度センサ(A)と衝突側の側面と反対側の側面の加速度センサ(C)の周波数分析結果の組み合わせによる判断結果(J2)とを、OR論理(J1+J2)若しくはAND論理(J1*J2)することにより、一層信頼性の高い制御を実現することができる。
【0165】[第2実施形態]次に、本発明の車体側面に変形の有無を判定する装置の更に他の実施の一形態の構成を図11のブロック図を参照して説明する。
【0166】先ず、この車体側面変形有無判定装置の基本的な構成を概略的に説明する。この車体側面変形有無判定装置は、衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニット(U1)と、衝突による車体の前記一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2加速度検出ユニット(U2)と、を具備している。第1加速度検出ユニット(U1)には、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定の閾値と比較して2値化する2値化手段とが含まれており、第2加速度検出ユニット(U2)には、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定の閾値と比較して2値化する2値化手段とが含まれている。この車体側面変形有無判定装置には、さらに、前記第1加速度検出ユニット(U1)に含まれる2値化手段から出力される2値化出力信号と、前記第2加速度検出ユニット(U2)に含まれる2値化手段から出力される2値化出力信号とに基づいて、車体側面の変形有無を判定する判定手段(J)を具備している。なお、以上の各ユニットU1,U2並びに判定手段Jは機能として存在するものであり、以下の図面では図示されてはいない。
【0167】変形有無を判定すべき車体側面を例えば運転席側の車体側面のみに限定するような片面判定の場合、上述した第1加速度検出ユニット(U1)並びに第2加速度検出ユニット(U2)の機能は、各々それ専用の機能を有するユニットにより実現することができる。これに対して、変形有無を判定すべき車体側面を車体の左右両側面とするような両面判定の場合には、上述した第1加速度検出ユニット(U1)並びに第2加速度検出ユニット(U2)の機能は、以下に説明するように、機能並びに配置の異なる複数のユニットを使用した様々な態様で実現することができる。
【0168】図11並びに図12に示される車体構造図には、代表的なユニット配置の一例がそれぞれ示されている。それらの図において、RUは車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニット、LUは車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニット、CUは車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットである。このように、ユニット配置としては、図11に示される3個構成(RU,LU,CU)のものと、図12に示される2個構成(RU,LU)のものとが少なくとも考えられる。
【0169】なお、『衝突による車体側面の変形と連動して変位する車体部位』、並びに、『車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位』の意味するところについて、第1の実施形態で説明したとおりである。車両中央ユニットCUは、以上説明した『衝突による車体側面の変形と連動して変位する車体部位』以外の車体部位であればどこどもよいのであるが、車両左側ユニットLU並びに車両右側ユニットRUに関する位置関係が対称的になることを考慮した場合、図5(b)に示されるセンタートンネル20上等のように、車体の前後方向へ延びる中心軸線X上の適当な部位に取り付けることが好ましいであろう。
【0170】次に、図11に示される3個構成のユニット配置において、各ユニットRU,LU,CUがどのように機能するかを概略的に説明する。
【0171】先に説明したように、本発明を構成するためには、衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニット(U1)と、衝突による車体の前記一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2加速度検出ユニット(U2)と、前記第1加速度検出ユニット(U1)に含まれる2値化手段から出力される2値化出力信号と、前記第2加速度検出ユニット(U2)に含まれる2値化手段から出力される2値化出力信号とに基づいて、車体側面の変形有無を判定する判定手段(J)とが必要とされる。なお、ここで、U1,U2,Jは、機能として存在するもので、具体的に図示されるものではない。
【0172】これらの必須構成要素(U1,U2,J)の中で、第1加速度検出ユニット(U1)の有する機能については、右側面衝突に関しては車両右側ユニットRUにより、また左側面衝突に関しては車両左側ユニットLUにより実現される。これに対して、第2加速度検出ユニット(U2)並びに判定手段(J)の機能がいずれのユニットにて実現されるかについては、様々な手法が考えられる。
【0173】第1の手法では、後に図14を参照して詳細に説明するが、第2加速度検出ユニット(U2)並びに判定手段(J)の機能は、いずれも車両中央ユニットCUにより実現される。第2の手法では、後に図15を参照して詳細に説明するが、第2加速度検出ユニット(U2)の機能は、車両右側ユニットRUと車両左側ユニットLUの中で、衝突側と反対側に位置するユニットにより実現され、他方判定手段(J)の機能については、左右いずれの側の変形判定についても、車両中央ユニットCUにより実現される。
【0174】次に、図12に示される2個構成のユニット配置において、各ユニットRU,LUがどのように機能するかを概略的に説明する。この場合にも、第1加速度検出ユニット(U1)の有する機能については、右側面衝突に関しては車両右側ユニットRUにより、また左側面衝突に関しては車両左側ユニットLUにより実現される。これに対して、後に詳細に説明するが、第2加速度検出ユニット(U2)の機能は、車両右側ユニットRUと車両左側ユニットLUの中で、衝突側と反対側に位置するユニットにより実現され、他方判定手段(J)の機能については、右側の変形判定については車両右側ユニットRUにより、また左側の変形判定については車両左側ユニットLUにより実現される。
【0175】次に、判定手段(J)における車体側面の変形有無の判定は、第1加速度検出ユニット(U1)並びに第2加速度検出ユニット(U2)の取り扱う周波数成分に合わせた以下に述べる幾つかの判定論理に従って実現される。
【0176】第1の判定論理では、前記第1加速度検出ユニット(U1)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニット(U2)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)の2値化出力信号のオンタイミングとの、比較に基づいて、車体側面の変形有無が判定される。これは、図13(a)に示されるように、第2加速度検出ユニット(U2)で検出されるべき中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)をX軸、第1加速度検出ユニット(U1)で検出されるべき衝突側の高域周波数成分をY軸とする2軸平面上において両周波数成分で決まる座標の軌跡を観察すると、側面変形を伴う衝突の場合には、中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref2a)を越える時点よりも、衝突側の高域周波数成分がそのしきい値(Ref1a)を越える時点の方が早いのに対して、側面変形を伴わない衝突の場合には、衝突側の高域周波数成分がそのしきい値(Ref1a)を越える時点よりも、中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分がそのしきい値(Ref2a)を越える時点の方が、早いと言う知見に基づくものである。
【0177】第2の判定論理では、前記第1加速度検出ユニット(U1)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)の2値化出力信号のオンタイミングと、前記第2加速度検出ユニット(U2)に内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)の2値化出力信号のオンタイミングと、の比較に基づいて、車体側面に変形の有無が判定される。これは、図13(b)に示されるように、第2加速度検出ユニット(U2)で検出されるべき中央又は反対側の低域周波数成分(もしくは、低域を含むより広い所定帯域の周波数成分)をX軸、第1加速度検出ユニット(U1)で検出されるべき衝突側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)をY軸とする2軸平面上において両周波数成分で決まる座標の軌跡を観察すると、側面変形を伴う衝突の場合には、中央又は反対側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref2b)を越える時点よりも、衝突側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref1b)を越える時点の方が、早いのに対して、側面変形を伴わない衝突の場合には、衝突側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref1b)を越える時点よりも、中央又は反対側の低域周波数成分(もしくは低域を含むより広い所定帯域の周波数成分)がそのしきい値(Ref2b)を越える時点の方が早いと言う知見に基づくものである。
【0178】第3の判定論理では、前記第1加速度検出ユニット(U1)に含まれる加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニット(U2)に含まれる加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングとの比較に基づいて、車体側面に変形の有無が判定される。これは、図13(c)に示されるように、第2加速度検出ユニット(U2)で検出されるべき中央又は反対側の高域周波数成分をX軸、第1加速度検出ユニット(U1)で検出されるべき衝突側の高域周波数成分をY軸とする2軸平面上において両周波数成分で決まる座標の軌跡を観察すると、側面変形を伴う衝突の場合には、中央又は反対側の高域周波数成分がそのしきい値(Ref2c)を越える時点よりも、衝突側の高域周波数成分がそのしきい値(Ref1c)を越える時点の方が、早いのに対して、側面変形を伴わない衝突の場合には、衝突側の高域周波数成分がそのしきい値(Ref1c)を越える時点よりも、中央又は反対側の高域周波数成分がそのしきい値(Ref2c)を越える時点の方が、早いと言う知見に基づくものである。
【0179】次に、図14、図15、図16、並びに、図17にそれぞれ示される車体側面変形有無判定装置の具体的な4つの例を詳細に説明する。なお、上述の判定論理としては、図13(a)に示される第1の判定論理が採用されているが、これに代えて、図13(b)もしくは図13(c)に示される第2もしくは第3の判定論理を採用することもできる。
【0180】先ず最初に、図14に示される装置について説明する。この車体側面変形有無判定装置は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットCUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両中央ユニットCUに相当するように構成されている。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する右側面変形判定部RJと左側面変形判定部LJとが含まれている。
【0181】車両左側面ユニットLU並びに車両右側面ユニットRUは、加速度センサ101L,101R、アンチエリアシングフィルタ102L,102R、AD変換器103L,103R、ハイパスフィルタ104L,104R、絶対値変換器105L,105R、区間積分器106L,106R、及び、コンパレータ107L,107Rを含んでいる。
【0182】加速度センサ101L,101Rとしては、例えばピエゾ抵抗変化を利用する応力歪みゲージを半導体基板上に組込んだもの、静電容量型加速度センサ、圧電素子を用いた加速度センサなどを採用することができる。ここで必要な加速度の方向は主として車体側方であるが、センサそれ自体としては一つのセンサで二軸及び三軸の加速度を検出できるものを使用することもできる。
【0183】アンチエリアシングフィルタ102L,102Rは、AD変換に際する折り返し誤差を除去するために機能するものであり、種々の構成よりなるフィルタ機能を利用することができる。
【0184】AD変換器(A/D)103L,103Rは、アンチエリアシングフィルタ102L,102Rを介して供給される加速度センサ101L,101Rの出力をAD変換することによって左右の離散値加速度データGsl(k)、Gsr(k)に変換するものであり、種々の構成よりなるAD変換回路を採用することができる。
【0185】次いで、このようにして得られた左右の離散値加速度データGsl(k)、Gsr(k)は、それに続くハイパスフィルタ(HPF)104L,104R、絶対値変換器(ABS)105L,105R、区間積分器106L,106Rにより以下のように処理されることにより、左右の加速度センサ101L,101Rの検出加速度の高域周波数成分エネルギが求められる。
【0186】すなわち、左右のハイパスフィルタ(HPF)104L,104Rは、このようにして得られた離散値加速度データGsl(k),Gsr(k)を、例えばソフトウェア的に高域フィルタ処理することにより、加速度センサ101L,101Rの出力信号の高域周波数成分を抽出するものである。なお、上述の構成において、ハイパスフィルタ(HPF)104L,104Rとしては、例えば、前方もしくは後方差分やシンプソンの微分定理等の微分系演算アルゴリズムでも代用することができる。絶対値変換器(ABS)105L,105Rでは、ハイパスフィルタ(HPF)104L,104Rから得られる高域周波数成分をその絶対値に変換する。区間積分器106L,106Rでは、この絶対値変換された高域周波数成分を所定時間(例えば、5ms〜30ms程度)だけ区間積分する。これにより、左右の加速度センサ101L,101Rの過去所定時間内の出力信号に含まれる高域周波数成分エネルギが求められる。
【0187】次いで、区間積分器106L,106Rから得られる高域周波数成分エネルギは、その後段に配置されたコンパレータ(2値化手段に相当)107L,107Rにおいて所定の閾値Ref1と大小比較されて“1”若しくは“0”に2値化される。つまり、これらのコンパレータ107L,107Rは、左右の加速度センサ101L,101Rの過去所定時間内の出力中に含まれる高域周波数成分エネルギが所定値(Ref1)に達したか否かを判定することとなる。なお、絶対値変換器(ABS)105L,105R、区間積分器106L,106R、コンパレータ107L,107Rの機能についても、マイクロコンピュータにてソフトウェア的に容易に実現することができる。
【0188】一方、車両中央ユニットCUは、同様にして、加速度センサ101C、アンチエリアシングフィルタ102C、AD変換器(A/D)103C、ローパスフィルタ(LPF)104C、絶対値変換器(ABS)105C、区間積分器106C、及び、コンパレータ107Cを含んでいる。なお、これらの構成要素101C〜107Cの内容は、ローパスフィルタ(LPF)104Cを除き、先に説明した車両右側ユニットRU並びに車両左側ユニットLUのそれとほぼ同様である。
【0189】すなわち、加速度センサ101Cとしては、例えばピエゾ抵抗変化を利用する応力歪みゲージを半導体基板上に組込んだもの、静電容量型加速度センサ、圧電素子を用いた加速度センサなどを採用することができ、又ここで必要な加速度の方向は主として車体側方であるが、センサそれ自体としては一つのセンサで二軸及び三軸の加速度を検出できるものを使用することもできる。
【0190】アンチエリアシングフィルタ102Cは、AD変換に際する折り返し誤差を除去するために機能するものであり、種々の構成よりなるフィルタ機能を利用することができる。
【0191】AD変換器(A/D)103Cは、アンチエリアシングフィルタ102Cを介して供給される加速度センサ101Cの出力をAD変換することによって離散値加速度データGsc(k)に変換するものであり、種々の構成よりなるAD変換回路を採用することができる。
【0192】次いで、このようにして得られた離散値加速度データGsc(k)は、それに続くローパスフィルタ(LPF)104C、絶対値変換器(ABS)105C、区間積分器106Cにより以下のように処理され、中央の加速度センサ101Cの過去所定時間内の出力信号に含まれる低域周波数成分エネルギが求められる。
【0193】すなわち、ローパスフィルタ(LPF)104Cは、このようにして得られた離散値加速度データGsc(k)を、例えばソフトウェア的に低域フィルタ処理することにより、加速度センサ101Cの出力信号の低域周波数成分を抽出する。絶対値変換器(ABS)105Cでは、ローパスフィルタ(LPF)104Cから得られる低域周波数成分をその絶対値に変換する。区間積分器106Cでは、この絶対値変換された低域周波数成分を所定時間(例えば、5ms〜30ms程度)だけ区間積分する。これにより、中央の加速度センサ101Cの過去所定時間内の出力信号に含まれる低域周波数成分エネルギが求められる。
【0194】次いで、区間積分器106Cから得られる低域周波数成分エネルギは、その後段に配置されたコンパレータ(2値化手段に相当)107Cにおいて所定の閾値(Ref2)と大小比較され、“1”若しくは“0”に2値化される。つまり、このコンパレータ107Cは、中央の加速度センサ101Cの過去所定時間内の出力信号中に含まれる低域周波数成分エネルギが所定値Ref2に達したか否かを判定する。なお、絶対値変換器104Cを使用しない場合には、いずれか一方の衝突のみの低域成分に着目することとなるので、本実施例で絶対値変換器を使用しない場合には、区間積分器106Cの後段に逆符号のしきい値を判定するコンパレータがもう一つ必要となり、左右の両側面ユニットにそれぞれ組み合わされることとなる。
【0195】一方、このようにして、車両左側面ユニットLUのコンパレータ107L、並びに、車両右側面ユニットRUのコンパレータ107Rにて生成された2値化出力信号は、適当な伝送装置を介して車両中央ユニットCUへと送信される。尚、伝送装置を構成する送信機並びに受信機としては、“H”及び“L”をベースバンドのまま送受する簡単な構成は勿論のこと、その他、例えば高速伝送用の専用通信プロトコルで結ばれた一対の専用ICを車両左側面並びに右側面ユニットLU,RUと車両中央ユニットCUとのそれぞれに搭載することで構成することができる。またこれ以外にも、例えばインタフエイス回路とマイクロコンピュータにより独自の通信プロトコルに基づいて通信を行う構成とすることもできる。
【0196】次に、車両左側面ユニットLU並びに車両右側面ユニットRUから送られてくる2値化出力信号に基づいて、車両中央ユニットCUにおいて車体左側面若しくは車体右側面の変形有無を判定する動作を説明する。図14に示されるように、車両中央ユニットCUには、先に説明した判定手段(J)に相当する、左側面変形判定部LJと右側面変形判定部RJとが含まれている。
【0197】左側面変形判定部LJは、車両左側ユニットLUのコンパレータ107Lから送られてくる高域周波数成分エネルギ(閾値Ref1を越えているか否か)を示す2値化信号と、車両中央ユニットCUのコンパレータ107Cから送られてくる低域周波数成分エネルギ(閾値Ref2を越えているか否か)を示す2値化信号とに基づいて、車体の左側面に変形の有無を判定する。ここで、車両左側ユニットLUのコンパレータ107Lから送られてくる2値化信号のオンタイミング(しきい値Ref1を越えたタイミング)の方が車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)よりも早い場合には、車体の左側面に変形があるものとの判定が行われる。これに対して、車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)の方が車両左側ユニットLUのコンパレータ107Lから送られてくる2値化信号のオンタイミング(しきい値Ref1を越えたタイミング)よりも早い場合には、車体の左側面に変形がないものとの判定が行われる。
【0198】右側面変形判定部RJは、車両右側ユニットRUのコンパレータ107Rから送られてくる高域周波数成分エネルギ(閾値Ref1を越えているか否か)を示す2値化信号と、車両中央ユニットCUのコンパレータ107Cから送られてくる低域周波数成分エネルギ(閾値Ref2を越えているか否か)を示す2値化信号とに基づいて、車体の右側面に変形の有無を判定する。ここで、車両右側ユニットRUのコンパレータ107Rから送られてくる2値化信号のオンタイミング(しきい値Ref1を越えたタイミング)の方が車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)よりも早い場合には、車体の右側面に変形があるものとの判定が行われる。これに対して、車両中央ユニットCUのコンパレータ107Cから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)の方が車両右側ユニットRUのコンパレータ107Rから送られてくる2値化信号のオンタイミング(しきい値Ref2を越えたタイミング)よりも早い場合には、車体の右側面に変形がないものとの判定が行われる。
【0199】反対側側面における低域周波数成分エネルギをX軸、衝突側側面における高周波域成分エネルギをY軸とする2軸平面上において、衝突側側面に変形が生じたか否かを判定するようにした場合の判定結果の一例が図18に示されている。
【0200】同図において、aは車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こしたような場合における2軸平面上の値を示す曲線、bはオフセット側面衝突を起こした場合における2軸平面上の値を示す曲線、cは斜め側面衝突を起こした場合における2軸平面上の値を示す曲線、dは側面衝突を起こした場合における2軸平面上の値を示す曲線、eは側面に変形の有無を判定するために選ばれた所定傾きの閾値角度直線である。
【0201】図7を参照して先に説明したように、2軸平面上の座標値がX軸と閾値角度直線eとに挟まれる図中斜線で縁取られた領域に存在する場合には、衝突側側面には変形(イントルージョン等)が生じないものと判定される。これに対して、2軸平面上の値が、Y軸と閾値直線eとで挟まれる領域に存在する場合には、衝突側側面には変形(イントールジョン等)が生ずるものと判定される。
【0202】このような前提の基に各曲線a,b,c,dを観察すると、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こした場合には、曲線aが斜線で囲まれた領域に存在することから、衝突側側面には変形(イントルージョン等)が生じないものと正しく判定される(判定1)。また、オフセット側面衝突の場合にも、曲線bが斜線で囲まれた領域に存在することから、衝突側側面には変形が生じないものと正しく判定される(判定2)。これに対して、斜め側面衝突を起こしたような場合には、曲線cが斜線で囲まれた領域に存在しないことから、衝突側側面に変形(イントルージョン等)が生ずるもの正しく判定される(判定3)。また、車両側面衝突の場合にも、曲線dが斜線で囲まれた領域には存在しないことから、衝突側側面に変形が生ずるもの正しく判定される(判定4)。
【0203】以上の判定(判定1〜4)は別の観点からすれば、つぎのようにも理解される。
【0204】すなわち、車両が横移動して縁石斜め跳ね返りを起こしたり、或いは縁石側面衝突を起こした場合には、曲線aは時間の経過と共に線分PQを横切る。同様にして、オフセット側面衝突の場合にも、曲線bは時間の経過と共に線分PQを横切る。これに対して、斜め側面衝突を起こしたような場合には、曲線cは時間の経過と共に線分RQを横切る。同様にして、車両側面衝突の場合にも、曲線dは時間の経過と共に線分RQを横切る。ここで、任意の曲線が線分PQを横切ると言うことは、衝突側高域周波数成分エネルギが閾値Ref1を越えるよりも先に、反対側低域周波数成分エネルギが閾値Ref2を越えることを意味している。同様にして、任意の曲線が線分RQを横切ると言うことは、反対側低域周波数成分エネルギが閾値Ref2を越えるよりも先に、衝突側高域周波数成分エネルギが閾値Ref1を越えることを意味している。
【0205】そのため、車両の左右両側の2個の加速度センサから何らかの信号が得られた場合、衝突側の加速度信号に含まれる高域周波数成分エネルギと反対側の加速度信号に含まれる低域周波数成分エネルギとのそれぞれに着目し、いずれが先に閾値(Ref1又はRef2)を越えたかを観察することにより、その衝撃に伴い衝突側側面に変形の有無を的確に判定することができるのである。
【0206】このように、図14に示される装置によれば、衝突側と中央側との2箇所の加速度センサから到来する抽出帯域の異なる周波数成分エネルギを比較すると言う構成を採用しているため、衝突による車体側面の変形と連動して変位する車体部位に生ずる(必ずしも車体側面の変形のみには起因しない)加速度信号を少なくとも用いつつも、車体の衝突側側面に実際に変形が生じたか否かを的確に判定することができる。加えて、それら周波数成分エネルギが規定値に達したことをその加速度センサと一体に構成したコンパレータにて判定し、それらの判定結果たる1ビットの信号を伝送していずれが先にオンするかを側面変形判定部(LJ,RJ)にて判定すると言う構成を採用しているため、ユニットLU,RUの相互間において多ビットの加速度データそれ自体を伝送することが不要となり、ノイズの影響を回避できるため、信頼性が向上する利点がある。
【0207】次に、図15に示される装置について説明する。この車体側面変形有無判定装置は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットCUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側と反対側に位置するユニットに相当するように構成されている。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する右側面変形判定部RJと左側面変形判定部LJとが含まれている。
【0208】すなわち、図14と図15との比較により明らかなように、図15に示される装置にあっては、車両左側ユニットLU並びに車両右側ユニットRU内に、ローパスフィルタ(LPF)104L´,104R´、絶対値変換器(ABS)105L´,105R´、区間積分器106L´,106R´、コンパレータ107L´,107R´が含まれている。そのため、図14に示される装置で必要とされた車両中央ユニットCU内の要素101C,102C,103C,104C,105C,106C,107Cが取り除かれている。なお、図1414に示される装置と同一構成要素については、同符号を付すことにより説明は省略する。
【0209】この図15に示される装置によれば、加速度センサが2個で済むことに加え、第1加速度検出ユニット(U1)と第2加速度検出ユニット(U2)とが車両重心から等距離となるため、衝突により車両が回転した場合にも、それによる影響が両検出ユニット(U1,U2)に対して均等に作用することとなり、加速度検出の信頼性が高いと言う利点がある。なお、絶対値変換器105L´と105R´を使用しない場合、互いに反対側の衝突方向の低域成分を判定する符号に合わせたコンパレータ107L´と107R´のしきい値とすることになる。
【0210】次に、図16に示される装置について説明する。先に説明したように、この車体側面変形有無判定装置は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側と反対側に位置するユニットに相当するように構成されている。さらに、車両左側ユニットLUには、本発明の判定手段(J)に相当する左側変形判定部LJが、また車両右側ユニットRUには、本発明の判定手段(J)に相当する右側面変形判定部RJが含まれている。
【0211】すなわち、図15と図16との比較により明らかなように、図16に示される装置にあっては、車両左側ユニットLU内に左側面変形判定部LJを、また車両右側ユニットRU内に右側面変形部RJをそれぞれ含ませることにより、車両中央ユニットCUそれ自体を省略している。なお、図15に示される装置と同一構成要素については、同符号を付すことにより説明は省略する。
【0212】この図16に示される装置によれば、図15R>5に示される装置の利点に加えて、後述する側方エアバッグ起動制御装置が左右別々に左側面ユニットLU並びに右側面ユニットRUに内蔵される場合に、それに併せて左側面変形判定部LJ並びに右側面変形判定部RJを配置できる利点がある。
【0213】次に、図17に示される装置について説明する。この車体側面変形有無判定装置は、衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニット(U1)と、衝突による車体の一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる複数の第2加速度検出ユニット(U2)と、を具備する。前記第1加速度検出ユニット(U1)には、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが含まれている。一方、前記複数の第2加速度検出ユニット(U2)のそれぞれには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが含まれている。さらに、この車体側面に変形有無を判定する装置には、前記第1加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号と、前記複数の第2加速度検出ユニットのそれぞれに内蔵される2値化手段から出力される2値化信号とに基づいて、車体側面の変形有無を判定する判定手段が設けられている。
【0214】特に、この図17に示される実施形態では、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニット(RU)と、車体の左側面変形に連動して変位する車体部位に取り付けられる車両左側ユニット(LU)と、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニット(CU)とを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットと前記車両左側ユニットとのうちの衝突側に位置するユニットに相当する。また、前記複数の第2加速度検出ユニット(U2)が、前記車両右側ユニット(RU)と前記車両左側ユニット(LU)とのうちの衝突側と反対側に位置するユニットと、前記車両中央ユニット(CU)に相当する。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する第1、第2左側面判定部LJ1,LJ2と第1、第2右側面変形判定部RJ1,RJ2とが含まれている。
【0215】すなわち、図17に示されるように、車両左側ユニットLU並びに車両右側ユニットRU内には、ハイパスフィルタ(HPF)104L,104R、絶対値変換器(ABS)105L,105R、区間積分器106L,106R、コンパレータ107L,107Rからなる高域周波数成分抽出系の他に、区間積分器106L´,106R´、反転入力型のコンパレータ107L´,107R´からなる低域周波数成分抽出系が設けられている。図から明らかなように、この低域周波数成分抽出系は、AD変換器(A/D)103L,103Rの出力信号を、ローパスフィルタ(LPF)や絶対値変換器(ABS)を通過させることなく、区間積分器106L´,106R´に導くようにしたもので、これにより低域を含むより広い所定帯域の周波数成分を抽出するものである。こうして区間積分器106L´,106R´から抽出された低域周波数成分は、その後段に配置された反転入力型のコンパレータ107L´,107R´において、しきい値(−(Ref2))とそれぞれ比較されて2値化される。
【0216】一方、車両中央ユニットCU内には、区間積分器106C,非反転入力型のコンパレータ107C,反転入力型のコンパレータ107C´からなる低域周波数成分抽出系が設けられている。この低域周波数成分抽出系は、AD変換器(A/D)103Cの出力信号を、ローパスフィルタ(LPF)や絶対値変換器(ABS)を通過させることなく、区間積分器106Cに導くようにしたもので、これにより低域を含むより広い所定帯域の周波数成分を抽出するものである。こうして区間積分器106Cから抽出された低域周波数成分は、その後段に並列配置された非反転入力型のコンパレータ107C及び反転入力型のコンパレータ107C´において、しきい値Ref2´,−(Ref2´)とそれぞれ比較されて2値化される。
【0217】さらに、車両中央ユニットCU内には、本発明の判定手段(J)として機能する、第1左側面変形判定部LJ1、第2左側面変形判定部LJ2、第1右側面変形判定部RJ1、第2右側面変形判定部RJ2が含まれている。
【0218】第1左側面変形判定部LJ1は、非反転入力型のコンパレータ107Lから出力される左側の高域周波数成分2値化信号のオンタイミングと、非反転入力型のコンパレータ107Cから出力される中央側の低域周波数成分2値化信号のオンタイミングとに基づいて、車体の左側の側面に変形の有無を判定するものである。第2左側面変形判定部LJ2は、非反転入力型のコンパレータ107Lから出力される左側の高域周波数成分2値化信号のオンタイミングと、反転入力型のコンパレータ107R´から出力される右側の全域周波数成分2値化信号のオンタイミングとに基づいて、車体の左側の側面に変形の有無を判定するものである。
【0219】第1右側面変形判定部RJ1は、非反転入力型のコンパレータ107Rから出力される右側の高域周波数成分2値化信号のオンタイミングと、反転入力型のコンパレータ107C´から出力される中央側の低域周波数成分2値化信号のオンタイミングとに基づいて、車体の右側の側面に変形の有無を判定するものである。第2右側面変形判定部RJ2は、非反転入力型のコンパレータ107Rから出力される右側の高域周波数成分2値化信号のオンタイミングと、反転入力型のコンパレータ107L´から出力される左側の低域周波数成分2値化信号のオンタイミングとに基づいて、車体の右側の側面に変形の有無を判定するものである。
【0220】第1左側面変形判定部LJ1の判定出力と第2左側面変形判定部LJ2の判定出力とはオアゲート108を介して結合されている。そのため、車両左側ユニットLUと車両中央ユニットCUとの比較、或いは、車両左側ユニットLUと車両右側ユニットとの比較のいずれかにおいて、車体左側面に変形が生じたと判定がなされると、左側側面変形有りの旨の判定出力が直ちに外部へ送出される。
【0221】第1右側面変形判定部RJ1の判定出力と第2右側面変形判定部RJ2の判定出力とはオアゲート108´を介して結合されている。そのため、車両右側ユニットRUと車両中央ユニットCUとの比較、或いは、車両右側ユニットRUと車両左側ユニットLUとの比較のいずれかにおいて、車体右側面に変形が生じたと判定がなされると、右側側面変形有りの旨の判定出力が直ちに外部へ送出されこととなる。
【0222】この図17に示される車体側面変形判定装置によれば、衝突側側面の加速度センサの出力を、車両中央側並びに反対側の2箇所のセンサの出力と比較しているため、判定の信頼性を向上させることができる。また、衝突側の高域周波数成分と対比される周波数成分として中央側並びに反対側の低域周波数成分を使用しているため、ローパスフィルタが不要となり、加えて、コンパレータとしても、反転入力型のものを使用しているため、絶対値変換器も不要となる利点がある。
【0223】なお、図17に示される例では、オアゲート108,108’を使用することにより、2個の側面変形判定部の論理和を出力するようにしているが、オアゲート108,108’の代わりにアンドゲートを使用することにより、2個の側面変形部の論理積を出力するようにしてもよい。
【0224】[第3実施形態]次に、本発明に係る車体側面変形有無判定装置が適用された車両用側方エアバッグ起動制御装置全体の構成並びにその動作を図19乃至図24を参照して説明する。
【0225】図19に示されるように、この車両用側方エアバッグ起動制御装置200は、車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットRUと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットLUと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットCUとを有する。そして、前記第1加速度検出ユニット(U1)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突側に位置するユニットに相当し、かつ前記第2加速度検出ユニット(U2)が、前記車両右側ユニットRU若しくは車両左側ユニットLUのうちの衝突と反対側に位置するユニットと前記車両中央ユニットCUの両方に相当するように構成されている。さらに、車両中央ユニットCUには、本発明の判定手段(J)に相当する右側面変形判定部RJと左側面変形判定部LJとが含まれている。
【0226】車両左側ユニットLUと車両右側ユニットRUとは、同一の構成を有するものである。すなわち、車両左側ユニットLUには、加速度センサ201L,アンチエリアシングフィルタ202L、AD変換器203L、ハイパスフィルタ(HPF)204L、絶対値変換器(abs)205L、区間積分器206L、コンパレータ207L、ローパスフィルタ(LPF)208L、絶対値変換器(abs)209L、区間積分器210L、及び、コンパレータ211Lが含まれている。同様にして、車両右側ユニットRUには、加速度センサ201R,アンチエリアシングフィルタ202R、AD変換器203R、ハイパスフィルタ(HPF)204R、絶対値変換器(abs)205R、区間積分器206R、コンパレータ207R、ローパスフィルタ(LPF)208R、絶対値変換器(abs)209R、区間積分器210R、及び、コンパレータ211Rが含まれている。そして、これらの要素201L,201R〜211L,211Rは、本発明に係る側面変形有無判定装置の一部を構成している。
【0227】加えて、車両左側ユニットLUには、変形無し時の左側面衝突用演算ブロック220Lと変形時の左側面衝突用演算プロック230Lとが含まれている。図20に詳しく示されるように、変形無し時の左側面衝突用演算ブロック220Lは、A/D変換器203Lから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器221Lと、区間積分器221Lの積分結果を所定のしきい値(Vlud)と比較して2値化するコンパレータ222Lと、コンパレータ222Lの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223Lとを含んでいる。
【0228】変形時の左側面衝突用演算プロック230Lは、この例では、変形時高速側面衝突判定ブロック230LAと変形時中速側面衝突判定ブロック230LBとから構成されている。変形時高速側面衝突判定ブロック230LAは、A/D変換器203Lから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LAと、区間積分器231LAの積分結果を所定のしきい値(Vlh)と比較して2値化するコンパレータ232LAと、コンパレータ232LAの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LAとを含んでいる。一方、変形時中速側面衝突判定ブロック230LBは、A/D変換器203Lから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LBと、区間積分器231LBの積分結果を所定のしきい値(Vlm)と比較して2値化するコンパレータ232LBと、コンパレータ232LBの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LBとを含んでいる。
【0229】同様にして、車両右側面ユニットRUには、変形無し時の右側面衝突用演算ブロック220Rと変形時の右側面衝突用演算ブロック230Rとが含まれている。
【0230】図21に示されるように、変形無し時の右側面衝突用演算ブロック220Rは、A/D変換器203Rから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器221Rと、区間積分器221Rの積分結果を所定のしきい値(Vrud)と比較して2値化するコンパレータ222Rと、コンパレータ222Rの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223Rとを含んでいる。
【0231】変形時の右側面衝突用演算プロック230Rは、変形時高速側面衝突判定ブロック230RAと変形時中速側面衝突判定ブロック230RBとから構成されている。変形時高速側面衝突判定ブロック230RAは、A/D変換器203Rから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231RAと、区間積分器231RAの積分結果を所定のしきい値(Vrh)と比較して2値化するコンパレータ232RAと、コンパレータ232RAの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RAとを含んでいる。一方、変形時中速側面衝突判定ブロック230RBは、A/D変換器203Rから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231RBと、区間積分器231RBの積分結果を所定のしきい値(Vrm)と比較して2値化するコンパレータ232RBと、コンパレータ232RBの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RBとから構成されている。
【0232】一方、車両中央ユニットCUには、変形無し時の左側面衝突用演算プロック220LCと、変形時の左側面衝突用演算プロック230LCと、変形無し時の右側面衝突用演算ブロック220RCと、変形時の右側面衝突用演算ブロック230RCとが含まれている。
【0233】図22に示されるように、変形無し時の左側面衝突用演算プロック220LCは、A/D変換器203Cから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器221LCと、区間積分器221LCの積分結果を所定のしきい値(Vcud)と比較して2値化するコンパレータ222LCと、コンパレータ222LCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223LCとから構成されている。
【0234】変形時の左側面衝突用演算プロック230LCは、変形時高速側面衝突判定ブロック230LACと変形時中速側面衝突判定ブロック230LBCとから構成されている。変形時高速側面衝突判定ブロック230LACは、A/D変換器203Cから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LACと、区間積分器231LACの積分結果を所定のしきい値(Vch)と比較して2値化するコンパレータ232LACと、コンパレータ232LACの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LACとを含んでいる。一方、変形時中速側面衝突判定ブロック230LBCは、A/D変換器203Cから送られてくる離散値加速度データを所定の積分時間を以て区間積分する区間積分器231LBCと、区間積分器231LBCの積分結果を所定のしきい値(Vcm)と比較して2値化するコンパレータ232LBCと、コンパレータ232LBCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233LBCとを含んでいる。
【0235】変形無し時の右側面衝突用演算プロック220RCは、区間積分器221LCの積分結果を所定のしきい値(−(Vcud))と比較して2値化するコンパレータ222RCと、コンパレータ222RCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ223RCとを含んでいる。
【0236】変形時の右側面衝突用演算プロック230RCは、変形時高速側面衝突判定ブロック230RACと変形時中速側面衝突判定ブロック230RBCとから構成されている。変形時高速側面衝突判定ブロック230RACは、区間積分器231LACの積分結果を所定のしきい値(−(Vch))と比較して2値化するコンパレータ232RACと、コンパレータ232RACの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RBCとを含んでいる。一方、変形時中速側面衝突判定ブロック230RBCは、区間積分器231LBCの積分結果を所定のしきい値(−(Vcm))と比較して2値化するコンパレータ232RBCと、コンパレータ232RBCの出力信号のエッジに応答してワンショットパルスを出力するワンショットタイマ233RBCとを含んでいる。
【0237】加えて、車両中央ユニットCUには、さらに、変形無し時の左側面衝突判定部240Lと、変形時の左側面衝突判定部250Lと、変形無し時の右側面衝突判定部240Rと、変形時の右側面衝突判定部250Rと、左側面の変形有無判定部LJと、右側面の変形有無判定部RJと、左側面の衝突総合判定部260Lと、右側面の衝突総合判定部250Rとが含まれている。
【0238】変形無し時の左側面衝突判定部240Lは、車両左側ユニットLUに内蔵された変形無し時の左側面衝突用演算ブロック220Lからの信号と車両中央ユニットCUに内蔵された変形無し時の左側面衝突判定用演算プロック220LCからの信号とに基づいて、車体左側面に変形が生じない状態であっても、乗員が傷害を受ける虞があるか否かを判定する。図22に示されるように、この変形無し時の左側面衝突判定部240Lの機能は、アンドゲート241Lにより実現することができる。
【0239】変形時の左側面衝突判定部250Lは、車両左側ユニットLUに内蔵された変形時高速側面衝突判定用演算ブロック230LAからの信号と、車両中央ユニットCUに内蔵された変形時高速左側面衝突判定用演算プロック230LACからの信号とに基づいて、車体左側面に高速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。同時に、変形時の左側面衝突判定部250Lは、車両左側ユニットLUに内蔵された変形時中速側面衝突判定用演算ブロック230LBからの信号と、車両中央ユニットCUに内蔵された変形時中速左側面衝突判定用演算プロック230LBCからの信号とに基づいて、車体左側面に中速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。図22に示されるように、この変形時の左側面衝突判定部250Lの機能は、2個のアンドゲート251L,252Lと1個のオアゲート253Lとで実現することができる。
【0240】変形無し時の右側面衝突判定部240Rは、車両右側ユニットRUに内蔵された変形無し時の右側面衝突用演算ブロック220Rからの信号と、車両中央ユニットCUに内蔵された変形無し時の右側面衝突判定用演算プロック220RCからの信号とに基づいて、車体右側面に変形が生じない状態で乗員が障害を受ける虞があるか否かを判定する。図22に示されるように、この変形無し時の左側面衝突判定部240Rの機能は、アンドゲート241Rにより実現することができる。
【0241】変形時の右側面衝突判定部250Rは、車両右側ユニットRUに内蔵された変形時高速側面衝突判定用演算ブロック230RAからの信号と、車両中央ユニットCUに内蔵された変形時高速右側面衝突判定用演算プロック230RACからの信号とに基づいて、車体右側面に高速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。同時に、変形時の右側面衝突判定部250Rは、車両右側ユニットRUに内蔵された変形時中速側面衝突判定用演算ブロック230RBからの信号と、車両中央ユニットCUに内蔵された変形時中速右側面衝突判定用演算プロック230RBCからの信号とに基づいて、車体右側面に中速側面衝突により変形が生ずる状態で、乗員が傷害を受ける虞があるか否かを判定する。図22に示されるように、この変形時の左側面衝突判定部250Lの機能は、2個のアンドゲート251R,252Rと1個のオアゲート253Rとで実現することができる。
【0242】左側面変形有無判定部LJは、車両左側ユニットLUに内蔵された高域成分2値化用のコンパレータ207Lからの2値化信号のオンタイミングと車両右側ユニットRUに内蔵された低域成分2値化用のコンパレータ211Rからの2値化信号のオンタイミングとを比較し、高域成分側のオンタイミングの方が低域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていると判定し、低域成分側のオンタイミングの方が高域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていないと判定する。
【0243】右側面変形有無判定部RJは、車両右側ユニットRUに内蔵された高域成分2値化用のコンパレータ207Rからの2値化信号のオンタイミングと車両左側ユニットLUに内蔵された低域成分2値化用のコンパレータ211Lからの2値化信号のオンタイミングとを比較し、高域成分側のオンタイミングの方が低域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていると判定し、低域成分側のオンタイミングの方が高域成分側のオンタイミングよりも早い場合には、車両左側面に変形が生じていないと判定する。
【0244】図19並びに図22に示される側面変形有無判定部(LJ又はRJ)の動作が図23並びに図24に示されている。尚、図23は側面変形を殆ど有しない移動のみの場合の動作であり、図24は乗員に障害が及びかねない側面変形を有する場合の動作である。又、図中、曲線aは衝突側の高域周波数エネルギ、曲線bは反対側の低域周波数エネルギ、直線cは閾値Ref1(=Ref2)の大きさ、曲線dは衝突側コンパレータの出力、曲線eは衝突側と反対側コンパレータの出力、曲線fは側面変形判定部(LJ又はRJ)の出力である。
【0245】図23から明らかなように、衝突側並びに衝突側と反対側の加速度信号が、側面変形を殆ど有しない移動のみに起因する場合には、曲線bに示される衝突側と反対側の低域周波数成分エネルギの方が、曲線aに示される衝突側の高域周波数成分エネルギよりも先に、直線cに示される閾値Ref1(=Ref2)を越えることとなる。すると、曲線eに示される衝突側と反対側コンパレータ出力の方が、曲線dに示される衝突側コンパレータ出力よりも先にオンすることにより、曲線fに示される変形有無判定出力は初期状態である『変形無し』に維持される。
【0246】図24から明らかなように、衝突側並びに衝突側と反対側の加速度信号が、衝突による側面変形に起因する場合には、曲線aに示される衝突側の高域周波数成分エネルギの方が、曲線bに示される衝突側と反対側の低域周波数成分エネルギよりも先に、直線cに示される閾値Ref1(=Ref2)を越えることとなる。すると、曲線dに示される衝突側コンパレータ出力の方が、曲線eに示される衝突側と反対側コンパレータ出力よりも先にオンすることにより、このオンタイミングに応答して、曲線fに示される変形有無判定出力は初期状態である『変形無し』から『変形有り』に転ずることとなる。なお、図24に示されるように、曲線fに示される変形有無判定出力は、曲線a,bに示される両成分エネルギがいずれも直線cに示される閾値よりも低下するのを待って、『変形有り』から『変形無し』へと自動的に復帰する。
【0247】左側面衝突総合判定部260Lは、左側面変形有無判定部LJの判定結果に応じて、変形無し時の左側面衝突判定部240Lの判定結果と変形時の左側面衝突判定部250Lの判定結果とのいずれかを、左側の側方エアバッグの起動信号SLとして出力する。図22に示されるように、この左側面衝突総合判定部260Lの機能は、オアゲート261Lとアンドゲート262Lとで実現することができる。
【0248】右側面衝突総合判定部260Rは、右側面変形有無判定部LJの判定結果に応じて、変形無し時の右側面衝突判定部240Rの判定結果と変形時の右側面衝突判定部250Lの判定結果とのいずれかを、右側の側方エアバッグの起動信号SLとして出力する。図21に示されるように、この右側面衝突総合判定部260Rの機能は、オアゲート261Rとアンドゲート262Rとで実現できる。
【0249】
【発明の効果】以上の説明から明らかなように、本発明によれば、車体側面に取り付けられて車体側面の変形と車両全体の移動とが合成された加速度を検出する加速度センサの出力を用いつつも、車両の衝突に伴い車両側面に実際に変形が生じたか否かを的確に判定することができる。
【0250】そのため、この判定出力を利用すれば、側方エアバッグ起動制御装置において、乗員に影響のない低速縁石側面衝突や低速オフセット側面衝突に起因して加速度の区間積分結果が衝突直後に比較的に急峻に立ち上がったとしても、実際に側面変形が生じていない旨の判定出力を加味することにより、側方エアバッグシステムの不要な作動を未然に防止することができる。
【0251】さらに、側面変形の伴わない衝突であっても、乗員が傷害を受ける虞のある中高速縁石側面衝突や中高速オフセット側面衝突の場合には、側面変形の伴わない場合における判定基準を適用することにより、側方エアバッグシステムを確実に起動させて、乗員が慣性でドア内側に衝突して傷害を受ける事態を未然に防止することができる。
【図面の簡単な説明】
【図1】車体の衝突側側面、車体中央部、並びに、車体の反対側側面にそれぞれ対応して取り付けられた加速度センサの出力の周波数分布が、イントルージョンの生じていない時間帯とイントルージョンの生じている時間帯とでどのように相違するかを示す図である。
【図2】車体の衝突側側面、並びに、車体の反対側側面にそれぞれ対応して取り付けられた2個の加速度センサの出力の立ち上がりタイミングが、車体側面に変形のある場合とない場合とでどのように相違するかを示す図である。
【図3】車体の衝突側側面、車体中央部、並びに、車体の反対側側面にそれぞれ対応して取り付けられた加速度センサの出力の周波数分布が、前部右側面へのオフセット側面衝突により車体が回転する場合、後部右側面へのオフセット側面衝突により車体が回転する場合、並びに、剛性の高い車体への衝突の場合で、どのように相違するかを示す図である。
【図4】本発明の第1実施形態にかかる方法および装置が適用された側方エアバッグ起動制御装置全体の電気的な構成を概略的に示すプロック図である。
【図5】加速度センサの取付部位を説明するための車体構造図である。
【図6】周波数成分抽出用のローバスフィルタ並びにバンドパスフィルタの周波数特性を説明するためのグラフである。
【図7】2軸平面上の領域比較を用いて側面変形有無を判定する手法を説明するためのグラフである。
【図8】反対側低周波成分エネルギと衝突側高周波域成分エネルギとの比を用いて側面変形有無を判定する手法を説明するためのグラフである。
【図9】反対側低周波域成分エネルギと衝突側高周波域成分との比を用いて側面変形を伴う衝突を実際に判定した結果を示すグラフである。
【図10】反対側低周波域成分エネルギと衝突側高周波域成分との比を用いて側面変形を伴わない衝突を実際に判定した結果を示すグラフである。
【図11】本発明の第2実施形態に係る装置におけるユニット配置の一例を示す車体構造図である。
【図12】本発明の第2実施形態に係る装置におけるユニット配置の他の一例を示す車体構造図である。
【図13】本発明の第2実施形態に係る装置に適用される変形有無判定手法の幾つかの例を示す図である。
【図14】本発明の第2実施形態に係る装置の一例を示すブロック図である。
【図15】本発明の第2実施形態に係る装置の他の一例を示すブロック図である。
【図16】本発明の第2実施形態に係る装置の他の一例を示すブロック図である。
【図17】本発明の第2実施形態に係る装置のさらに他の一例を示すブロック図である。
【図18】本発明の第2実施形態に係る装置において、第1の判定手法により側面変形有無判定を実際に行った結果を示すグラフである。
【図19】本発明の第3実施形態に係る車両用サイドエアバッグ起動制御装置の全体構成を示すブロック図である。
【図20】図19に示す装置の車両左側ユニットの詳細を示すブロック図である。
【図21】図19に示す装置の車両右側ユニットの詳細を示すブロック図である。
【図22】図19に示す装置の車両中央ユニットの詳細を示すブロック図である。
【図23】図19に示す装置の変形有無判定装置の変形無し時の動作を示すタイムチャートである。
【図24】図19に示す装置の変形有無判定装置の変形時の動作を示すタイムチャートである。
【図25】従来装置の問題点を説明するためのグラフである。
【図26】区間積分の定義を説明するための図である。
【符号の説明】
LU 車両左側ユニット
RU 車両右側ユニット
CU 車両中央ユニット
G 重心
1L,1R 加速度センサ
2L,2R アンチエリアシングフィルタ
3L,3R AD変換器
4L,4R 送信器
5L,5R 受信器
6L,6R バンドパスフィルタ
7L,7R 絶対値変換器
8L,8R 区間積分器
9L,9R ローパスフィルタ
10L,10R 絶対値変換器
11L,11R 区間積分器
12 側面変形有無判定部
13 起動要否判定部
14L 左側Aピラー
15L 左側Bピラー
15R 右側Bピラー
16L 左側Cピラー
17L 左側サイドシル
17R 右側サイドシル
18L 左側前ドアインナパネル
19L 左側前ドアビーム
20 センタトンネル
21 前席クロスメンバ
22 後席クロスメンバ
23L 左側後ドアビーム
24L 左側後ドアインナパネル
25 サイドルーフフレーム
101L,101R,101C 加速度センサ
102L,102R,102C アンチエリアシングフィルタ
103L,103R,103C AD変換器
104L,104R ハイパスフィルタ
104C,104L’,104R’ ローパスフィルタ
105L,105R,105C 絶対値変換器
106L,106R,106C,106L’,106R’ 区間積分器
107L,107R,107C,107L’,107R’ コンパレータ
LJ 左側面変形判定部
LR 右側面変形判定部
LJ1 第1左側面変形判定部
LJ2 第2左側面変形判定部
RJ1 第1右側面変形判定部
RJ2 第2右側面変形判定部
200 側方エアバッグ起動制御装置
201L,201R,201C 加速度センサ
202L,202R,202C アンチエリアシングフィルタ
203L,203R,203C A/D変換器
204L,204R ハイパスフィルタ
208L,208R ローパスフィルタ
205L,209L,205R,209R 絶対値変換器
206L,210L,206R,210R 区間積分器
207L,211L,207R,211R コンパレータ
220L,220LC 変形無し時の左側面衝突用演算ブロック
230L,230LC 変形時の左側面衝突用演算ブロック
220R,220RC 変形無し時の右側面衝突用演算ブロック
230R,230RC 変形時の右側面衝突用演算ブロック
240L 変形無し時の左側面衝突用判定部
240R 変形無し時の右側面衝突用判定部
250L 変形時の左側面衝突用判定部
250R 変形時の右側面衝突用判定部
260L 左側面衝突総合判定部
260R 右側面衝突総合判定部
SL 左側の側方エアバッグ起動信号
SR 右側の側方エアバッグ起動信号
【特許請求の範囲】
【請求項1】 衝突による車体側面の変形と連動して変位する車体部位に生ずる加速度を検出するステップと、前記検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップと、前記分析により得られた周波数成分に基づいて車体の衝突側の側面の変形有無を判定するステップとを具備すること、を特徴とする車体側面の変形有無を判定する方法。
【請求項2】 前記車体側面の変形有無の判定は、前記分析により得られる周波数成分を所定の判定論理に照らすことにより行われること、を特徴とする請求項1に記載の車体側面の変形有無を判定する方法。
【請求項3】 前記判定論理は、高域周波数成分と基準値との比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項2に記載の車体側面の変形有無を判定する方法。
【請求項4】 前記判定論理は、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と高域周波数成分との比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項2に記載の車体側面の変形有無を判定する方法。
【請求項5】 衝突による車体側面の変形と連動して変位する第1の車体部位に生ずる加速度を検出するステップと、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に生ずる加速度を検出するステップと、前記検出される第1の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップと、前記検出される第2の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップと、前記分析により得られた両周波数成分に基づいて車体側面の変形有無を判定するステップと、を具備すること、を特徴とする車体側面の変形有無を判定する方法。
【請求項6】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位であること、を特徴とする請求項5に記載の車体側面の変形有無を判定する方法。
【請求項7】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位であること、を特徴とする請求項5に記載の車体側面の変形有無を判定する方法。
【請求項8】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位と、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位との2箇所の部位であること、を特徴とする請求項5に記載の車体側面の変形有無を判定する方法。
【請求項9】 前記車体側面の変形有無の判定は、前記第1の車体部位に生ずる加速度の分析により得られる周波数成分と、前記第2の車体部位に生ずる加速度の分析により得られる周波数成分とを、所定の判定論理に照らすことにより行われること、を特徴とする請求項5〜請求項8のいずれかに記載の車体側面の変形有無を判定する方法。
【請求項10】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項9に記載の車体側面の変形有無を判定する方法。
【請求項11】 前記判定論理は、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項9に記載の車体側面の変形有無を判定する方法。
【請求項12】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の高域周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項9に記載の車体側面の変形有無を判定する方法。
【請求項13】 前記車体部位で検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップは、車体部位で検出された加速度をフィルタリングすることにより目的とする周波数帯域を抽出し、その値もしくは絶対値を、所定区間に亘り積分することであること、を特徴とする請求項1〜請求項12のいずれかに記載の車体側面の変形有無を判定する方法。
【請求項14】 衝突による車体側面の変形と連動して変位する車体部位に生ずる加速度を検出する手段と、前記検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記分析により得られた周波数成分に基づいて車体の衝突側の側面の変形有無を判定する手段とを具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項15】 前記車体側面の変形有無の判定は、前記分析により得られる周波数成分を所定の判定論理に照らすことにより行われること、を特徴とする請求項14に記載の車体側面の変形有無を判定する装置。
【請求項16】 前記判定論理は、高域周波数成分と基準値との比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項15に記載の車体側面の変形有無を判定する装置。
【請求項17】 前記判定論理は、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、高域周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項15に記載の車体側面の変形有無を判定する装置。
【請求項18】 衝突による車体側面の変形と連動して変位する第1の車体部位の加速度を検出する手段と、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位の加速度を検出する手段と、前記検出される第1の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記検出される第2の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記分析により得られた両周波数成分に基づいて車体側面の変形有無を判定する手段と、を具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項19】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位であること、を特徴とする請求項18に記載の車体側面の変形有無を判定する装置。
【請求項20】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位であること、を特徴とする請求項18に記載の車体側面の変形有無を判定する装置。
【請求項21】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位と、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位との2箇所の部位であること、を特徴とする請求項18に記載の車体側面の変形有無を判定する装置。
【請求項22】 前記車体側面の変形有無の判定は、前記第1の車体部位に生ずる加速度の分析により得られる周波数成分と、前記第2の車体部位に生ずる加速度の分析により得られる周波数成分とを、所定の判定論理に照らすことにより行われること、を特徴とする請求項18〜請求項21のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項23】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項22に記載の車体側面の変形有無を判定する装置。
【請求項24】 前記判定論理は、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項22に記載の車体側面の変形有無を判定する装置。
【請求項25】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の高域周波数成分のとの比較結果に基づいて、車体側面に変形の有無を判定するものであること、、を特徴とする請求項22に記載の車体側面の変形有無を判定する装置。
【請求項26】 前記車体部位で検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段は、車体部位で検出された加速度をフィルタリングすることにより目的とする周波数帯域を抽出し、その値もしくは絶対値を、所定区間に亘り積分することであること、を特徴とする請求項14〜請求項25のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項27】 衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる加速度検出ユニットを具備し、前記加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、さらに前記加速度検出ユニットに内蔵される2値化手段から出力される2値化信号に基づいて車体側面の変形有無を判定する判定手段を具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項28】 前記判定手段は、前記加速度検出ユニットそれ自体に内蔵されていることを特徴とする請求項27に記載の車体側面の変形有無を判定する装置。
【請求項29】 衝突による前記車体の一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2ユニットをさらに具備し、前記判定手段は、前記第2ユニットに内蔵されていることを特徴とする請求項27に記載の車体側面の変形有無を判定する装置。
【請求項30】 前記判定手段における車体側面の変形有無の判定は、前記加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと所定の基準タイミングとの比較結果に基づいて行われること、を特徴とする請求項27〜請求項29のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項31】 前記判定手段における車体側面の変形有無の判定は、前記加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと前記加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項27〜請求項29のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項32】 衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニットと、衝突による車体の前記一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2加速度検出ユニットと、を具備し、前記第1加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、前記第2加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、さらに前記第1加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号と、前記第2加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号とに基づいて、車体側面の変形有無を判定する判定手段をさらに具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項33】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと車両左側ユニットとのうちの衝突側に位置するユニットであり、かつ前記第2加速度検出ユニットが、前記車両中央ユニットであること、を特徴とする請求項32に記載の車体側面の変形有無を判定する装置。
【請求項34】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと車両左側ユニットとのうちの衝突側に位置するユニットであり、かつ前記第2加速度検出ユニットは、前記車両右側ユニットと車両左側ユニットとのうちの衝突側と反対側に位置するユニットであること、を特徴とする請求項32に記載の車体側面の変形有無を判定する装置。
【請求項35】 前記判定手段は、前記第1加速度検出ユニット、及び/又は、第2加速度検出ユニットに内蔵されていることを特徴とする請求項33若しくは請求項34のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項36】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと前記車両左側ユニットのうちの衝突側に位置するユニットであり、前記第2加速度検出ユニットは、前記車両右側ユニットと前記車両左側ユニットのうちの衝突側と反対側に位置するユニットであり、かつ前記判定手段は、前記車両中央ユニットに含まれていること、を特徴とする請求項32に記載の車体側面の変形有無を判定する装置。
【請求項37】 衝突による車体の一側面の変形と連動して変位する車体部位に取り付けれる第1加速度検出ユニットと、衝突による車体の一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる複数の第2加速度検出ユニットと、を具備し、前記第1加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、前記複数の第2加速度検出ユニットのそれぞれには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、さらに前記第1加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号と、前記複数の第2加速度検出ユニットのそれぞれに内蔵される2値化手段から出力される2値化信号とに基づいて、車体側面の変形有無を判定する判定手段を具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項38】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと前記車両左側ユニットとのうちの衝突側に位置するユニットであり、前記複数の第2加速度検出ユニットが、前記車両右側ユニットと前記車両左側ユニットとのうちの衝突側と反対側に位置するユニットと、前記車両中央ユニットであること、を特徴とする請求項37に記載の車体側面の変形有無を判定する装置。
【請求項39】 前記判定手段における車体側面の変形有無の判定は、前記第1加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項32〜請求項38のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項40】 前記判定手段における車体側面の変形有無の判定は、前記第1加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項32〜請求項38のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項41】 前記判定手段における車体側面の変形有無の判定は、前記第1加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項32〜請求項38のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項42】 少なくとも車体側面に変形を生じている場合に適用されるべき第1の衝突判定系と、車体側面に変形を生じていない場合に適用されるべき第2の衝突判定系と、前記請求項14〜請求項41のいずれかに記載の車体側面の変形有無を判定する装置と、前記車体側面の変形有無の判定装置の判定結果に基づいて、前記第1の衝突判定系と前記第2の衝突判定系とのいずれかを選択する総合判定手段と、を具備することを特徴とする車両用乗員側方保護具の起動制御装置。
【請求項43】 コンピュータを、請求項14〜請求項42のいずれかに記載の装置の各構成手段の全部もしくは一部として機能させるためのプログラムを記録した記録媒体。
【請求項1】 衝突による車体側面の変形と連動して変位する車体部位に生ずる加速度を検出するステップと、前記検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップと、前記分析により得られた周波数成分に基づいて車体の衝突側の側面の変形有無を判定するステップとを具備すること、を特徴とする車体側面の変形有無を判定する方法。
【請求項2】 前記車体側面の変形有無の判定は、前記分析により得られる周波数成分を所定の判定論理に照らすことにより行われること、を特徴とする請求項1に記載の車体側面の変形有無を判定する方法。
【請求項3】 前記判定論理は、高域周波数成分と基準値との比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項2に記載の車体側面の変形有無を判定する方法。
【請求項4】 前記判定論理は、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と高域周波数成分との比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項2に記載の車体側面の変形有無を判定する方法。
【請求項5】 衝突による車体側面の変形と連動して変位する第1の車体部位に生ずる加速度を検出するステップと、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位に生ずる加速度を検出するステップと、前記検出される第1の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップと、前記検出される第2の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップと、前記分析により得られた両周波数成分に基づいて車体側面の変形有無を判定するステップと、を具備すること、を特徴とする車体側面の変形有無を判定する方法。
【請求項6】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位であること、を特徴とする請求項5に記載の車体側面の変形有無を判定する方法。
【請求項7】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位であること、を特徴とする請求項5に記載の車体側面の変形有無を判定する方法。
【請求項8】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位と、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位との2箇所の部位であること、を特徴とする請求項5に記載の車体側面の変形有無を判定する方法。
【請求項9】 前記車体側面の変形有無の判定は、前記第1の車体部位に生ずる加速度の分析により得られる周波数成分と、前記第2の車体部位に生ずる加速度の分析により得られる周波数成分とを、所定の判定論理に照らすことにより行われること、を特徴とする請求項5〜請求項8のいずれかに記載の車体側面の変形有無を判定する方法。
【請求項10】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項9に記載の車体側面の変形有無を判定する方法。
【請求項11】 前記判定論理は、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項9に記載の車体側面の変形有無を判定する方法。
【請求項12】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の高域周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項9に記載の車体側面の変形有無を判定する方法。
【請求項13】 前記車体部位で検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析するステップは、車体部位で検出された加速度をフィルタリングすることにより目的とする周波数帯域を抽出し、その値もしくは絶対値を、所定区間に亘り積分することであること、を特徴とする請求項1〜請求項12のいずれかに記載の車体側面の変形有無を判定する方法。
【請求項14】 衝突による車体側面の変形と連動して変位する車体部位に生ずる加速度を検出する手段と、前記検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記分析により得られた周波数成分に基づいて車体の衝突側の側面の変形有無を判定する手段とを具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項15】 前記車体側面の変形有無の判定は、前記分析により得られる周波数成分を所定の判定論理に照らすことにより行われること、を特徴とする請求項14に記載の車体側面の変形有無を判定する装置。
【請求項16】 前記判定論理は、高域周波数成分と基準値との比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項15に記載の車体側面の変形有無を判定する装置。
【請求項17】 前記判定論理は、低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、高域周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項15に記載の車体側面の変形有無を判定する装置。
【請求項18】 衝突による車体側面の変形と連動して変位する第1の車体部位の加速度を検出する手段と、衝突による車体側面の変形と連動しては実質的に変位しない第2の車体部位の加速度を検出する手段と、前記検出される第1の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記検出される第2の車体部位の加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段と、前記分析により得られた両周波数成分に基づいて車体側面の変形有無を判定する手段と、を具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項19】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位であること、を特徴とする請求項18に記載の車体側面の変形有無を判定する装置。
【請求項20】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位であること、を特徴とする請求項18に記載の車体側面の変形有無を判定する装置。
【請求項21】 前記第2の車体部位とは、車体の前後方向へ延びる中心軸線付近の点に位置する車体部位と、車体の前後方向へ延びる中心軸線に関して、前記第1の車体部位と対称的な点に位置する車体部位との2箇所の部位であること、を特徴とする請求項18に記載の車体側面の変形有無を判定する装置。
【請求項22】 前記車体側面の変形有無の判定は、前記第1の車体部位に生ずる加速度の分析により得られる周波数成分と、前記第2の車体部位に生ずる加速度の分析により得られる周波数成分とを、所定の判定論理に照らすことにより行われること、を特徴とする請求項18〜請求項21のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項23】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項22に記載の車体側面の変形有無を判定する装置。
【請求項24】 前記判定論理は、前記第1の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分と、前記第2の車体部位側の低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分との、比較結果に基づいて、車体側面に変形の有無を判定するものであること、を特徴とする請求項22に記載の車体側面の変形有無を判定する装置。
【請求項25】 前記判定論理は、前記第1の車体部位側の高域周波数成分と、前記第2の車体部位側の高域周波数成分のとの比較結果に基づいて、車体側面に変形の有無を判定するものであること、、を特徴とする請求項22に記載の車体側面の変形有無を判定する装置。
【請求項26】 前記車体部位で検出される加速度の過去所定時間内における変化に含まれる周波数成分を分析する手段は、車体部位で検出された加速度をフィルタリングすることにより目的とする周波数帯域を抽出し、その値もしくは絶対値を、所定区間に亘り積分することであること、を特徴とする請求項14〜請求項25のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項27】 衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる加速度検出ユニットを具備し、前記加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、さらに前記加速度検出ユニットに内蔵される2値化手段から出力される2値化信号に基づいて車体側面の変形有無を判定する判定手段を具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項28】 前記判定手段は、前記加速度検出ユニットそれ自体に内蔵されていることを特徴とする請求項27に記載の車体側面の変形有無を判定する装置。
【請求項29】 衝突による前記車体の一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2ユニットをさらに具備し、前記判定手段は、前記第2ユニットに内蔵されていることを特徴とする請求項27に記載の車体側面の変形有無を判定する装置。
【請求項30】 前記判定手段における車体側面の変形有無の判定は、前記加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと所定の基準タイミングとの比較結果に基づいて行われること、を特徴とする請求項27〜請求項29のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項31】 前記判定手段における車体側面の変形有無の判定は、前記加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと前記加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項27〜請求項29のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項32】 衝突による車体の一側面の変形と連動して変位する車体部位に取り付けられる第1加速度検出ユニットと、衝突による車体の前記一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる第2加速度検出ユニットと、を具備し、前記第1加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、前記第2加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、さらに前記第1加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号と、前記第2加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号とに基づいて、車体側面の変形有無を判定する判定手段をさらに具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項33】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと車両左側ユニットとのうちの衝突側に位置するユニットであり、かつ前記第2加速度検出ユニットが、前記車両中央ユニットであること、を特徴とする請求項32に記載の車体側面の変形有無を判定する装置。
【請求項34】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと車両左側ユニットとのうちの衝突側に位置するユニットであり、かつ前記第2加速度検出ユニットは、前記車両右側ユニットと車両左側ユニットとのうちの衝突側と反対側に位置するユニットであること、を特徴とする請求項32に記載の車体側面の変形有無を判定する装置。
【請求項35】 前記判定手段は、前記第1加速度検出ユニット、及び/又は、第2加速度検出ユニットに内蔵されていることを特徴とする請求項33若しくは請求項34のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項36】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと前記車両左側ユニットのうちの衝突側に位置するユニットであり、前記第2加速度検出ユニットは、前記車両右側ユニットと前記車両左側ユニットのうちの衝突側と反対側に位置するユニットであり、かつ前記判定手段は、前記車両中央ユニットに含まれていること、を特徴とする請求項32に記載の車体側面の変形有無を判定する装置。
【請求項37】 衝突による車体の一側面の変形と連動して変位する車体部位に取り付けれる第1加速度検出ユニットと、衝突による車体の一側面の変形と連動しては実質的に変位しない車体部位に取り付けられる複数の第2加速度検出ユニットと、を具備し、前記第1加速度検出ユニットには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、前記複数の第2加速度検出ユニットのそれぞれには、加速度センサと、該加速度センサの過去所定時間内の出力信号に含まれる特定周波数成分を所定のしきい値と比較して2値化する2値化手段とが内蔵されており、さらに前記第1加速度検出ユニットに内蔵される2値化手段から出力される2値化出力信号と、前記複数の第2加速度検出ユニットのそれぞれに内蔵される2値化手段から出力される2値化信号とに基づいて、車体側面の変形有無を判定する判定手段を具備すること、を特徴とする車体側面の変形有無を判定する装置。
【請求項38】 車体の右側面変形と連動して変位する車体部位に取り付けられる車両右側ユニットと、車体の左側面変形と連動して変位する車体部位に取り付けられる車両左側ユニットと、車体の右側面変形若しくは左側面変形のいずれに連動しても実質的に変位しない車体部位に取り付けられる車両中央ユニットとを有し、前記第1加速度検出ユニットが、前記車両右側ユニットと前記車両左側ユニットとのうちの衝突側に位置するユニットであり、前記複数の第2加速度検出ユニットが、前記車両右側ユニットと前記車両左側ユニットとのうちの衝突側と反対側に位置するユニットと、前記車両中央ユニットであること、を特徴とする請求項37に記載の車体側面の変形有無を判定する装置。
【請求項39】 前記判定手段における車体側面の変形有無の判定は、前記第1加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項32〜請求項38のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項40】 前記判定手段における車体側面の変形有無の判定は、前記第1加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる低域周波数成分もしくは低域を含むより広い所定帯域の周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項32〜請求項38のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項41】 前記判定手段における車体側面の変形有無の判定は、前記第1加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングと、前記第2加速度検出ユニットに内蔵される加速度センサの過去所定時間内の出力信号に含まれる高域周波数成分の2値化出力信号のオンタイミングとの比較に基づいて行われること、を特徴とする請求項32〜請求項38のいずれかに記載の車体側面の変形有無を判定する装置。
【請求項42】 少なくとも車体側面に変形を生じている場合に適用されるべき第1の衝突判定系と、車体側面に変形を生じていない場合に適用されるべき第2の衝突判定系と、前記請求項14〜請求項41のいずれかに記載の車体側面の変形有無を判定する装置と、前記車体側面の変形有無の判定装置の判定結果に基づいて、前記第1の衝突判定系と前記第2の衝突判定系とのいずれかを選択する総合判定手段と、を具備することを特徴とする車両用乗員側方保護具の起動制御装置。
【請求項43】 コンピュータを、請求項14〜請求項42のいずれかに記載の装置の各構成手段の全部もしくは一部として機能させるためのプログラムを記録した記録媒体。
【図1】


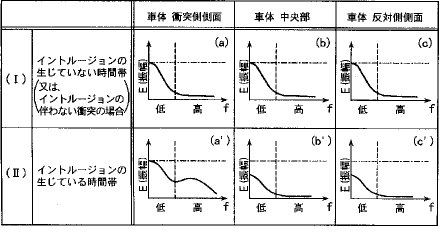
【図2】
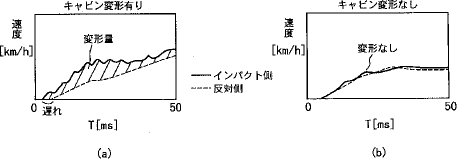
【図3】
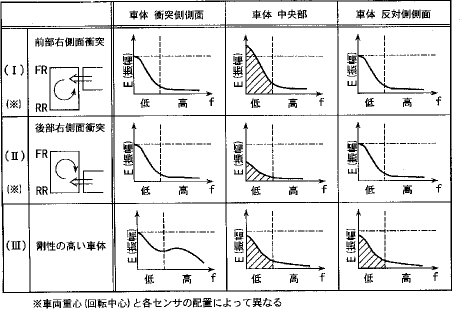
【図4】
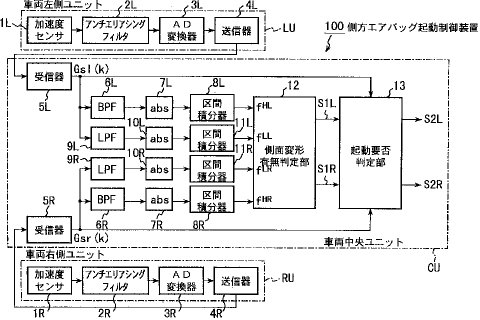
【図5】
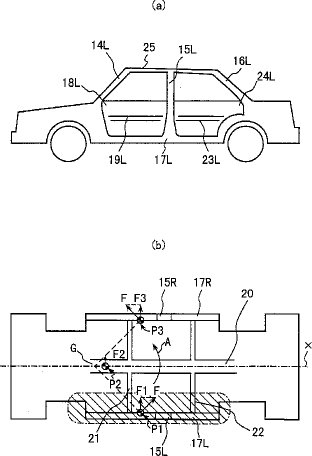
【図6】
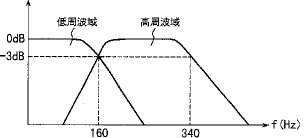
【図11】
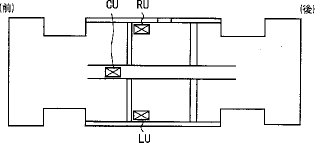
【図7】
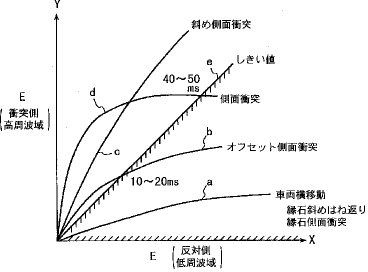
【図8】
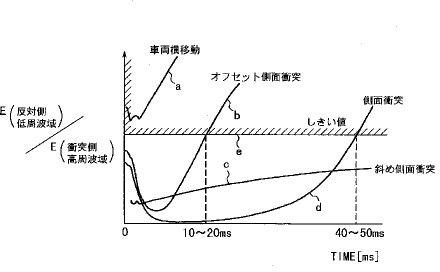
【図12】
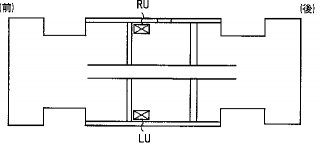
【図26】
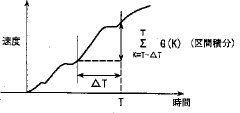
【図9】
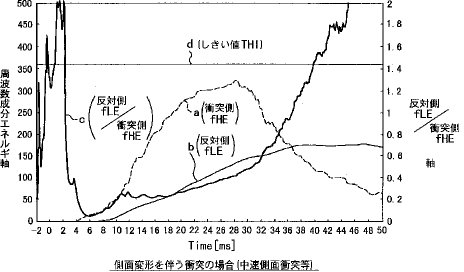
【図10】
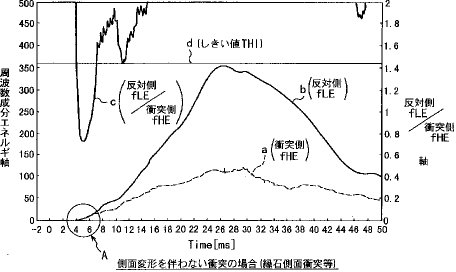
【図13】
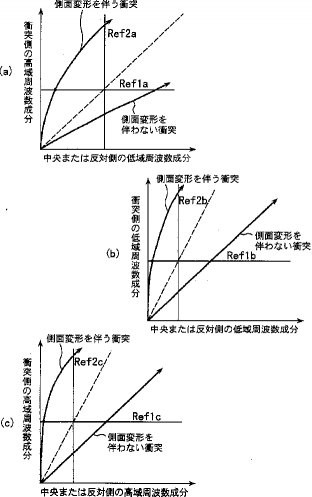
【図14】
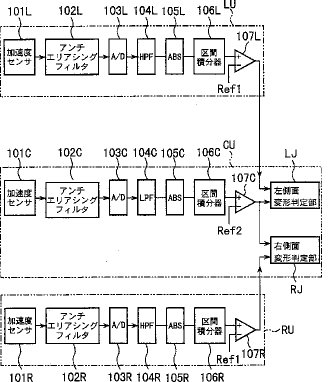
【図16】
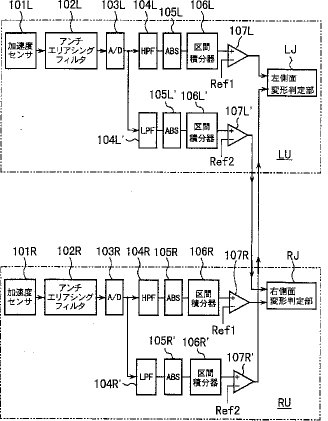
【図25】
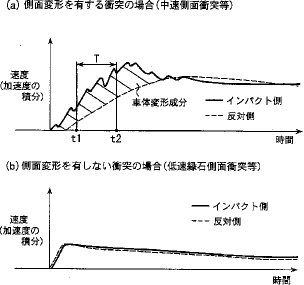
【図15】
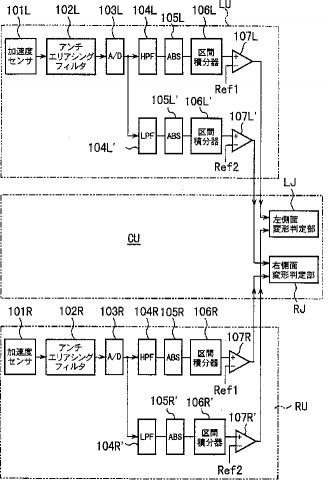
【図17】
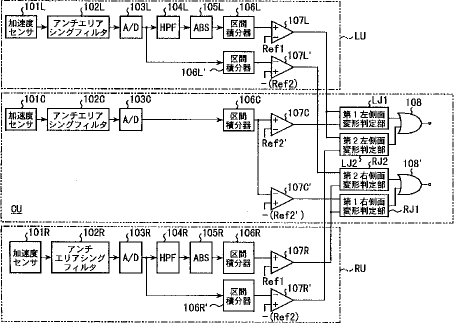
【図20】
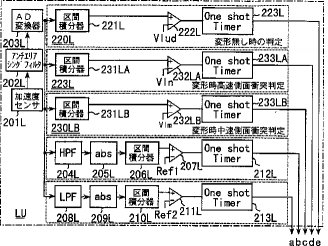
【図18】
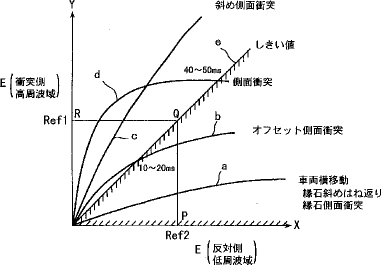
【図19】
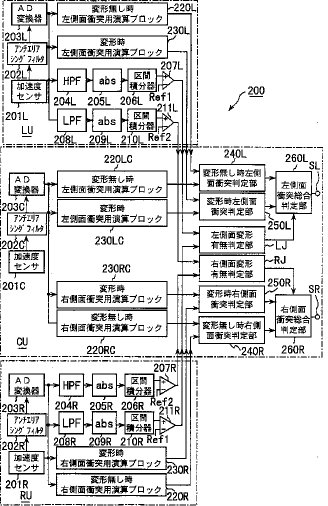
【図21】
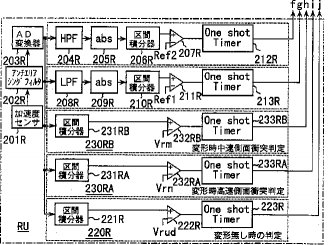
【図22】
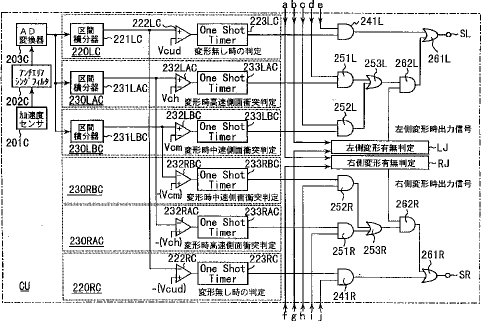
【図23】
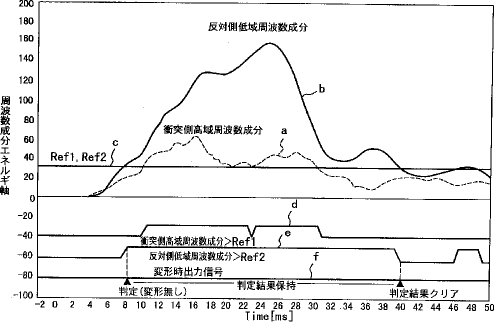
【図24】
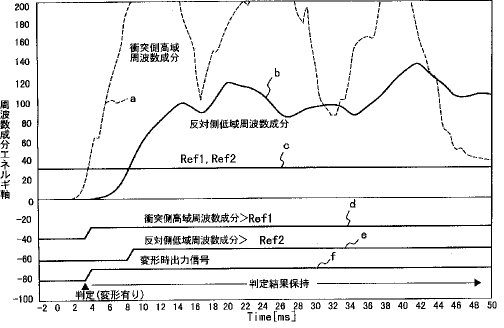
【図2】
【図3】
【図4】
【図5】
【図6】
【図11】
【図7】
【図8】
【図12】
【図26】
【図9】
【図10】
【図13】
【図14】
【図16】
【図25】
【図15】
【図17】
【図20】
【図18】
【図19】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開平11−6840
【公開日】平成11年(1999)1月12日
【国際特許分類】
【出願番号】特願平10−63987
【出願日】平成10年(1998)2月27日
【出願人】(000001937)日本電気ホームエレクトロニクス株式会社 (8)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【公開日】平成11年(1999)1月12日
【国際特許分類】
【出願日】平成10年(1998)2月27日
【出願人】(000001937)日本電気ホームエレクトロニクス株式会社 (8)
【出願人】(000005326)本田技研工業株式会社 (23,863)
[ Back to top ]