
農作業機
【課題】一気にプラウ12などの作業機が降下することを防いだ作業機を装着した農作業機を提供すること。
【解決手段】作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能を備え、車速センサ24により検知される所定の車速以上の車速が検出されない場合は、前記自動すき込み制御を禁止する制御構成を有する制御装置50を備えたトラクタであるので、作業機着脱時などを含めて前記自動すき込み制御が不要な場合に、この制御機能を働かせないので、誤操作しても急にリフトアーム19が下降して作業機やアスファルトを壊してしまうなどの恐れがなくなる。
【解決手段】作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能を備え、車速センサ24により検知される所定の車速以上の車速が検出されない場合は、前記自動すき込み制御を禁止する制御構成を有する制御装置50を備えたトラクタであるので、作業機着脱時などを含めて前記自動すき込み制御が不要な場合に、この制御機能を働かせないので、誤操作しても急にリフトアーム19が下降して作業機やアスファルトを壊してしまうなどの恐れがなくなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、土壌に対して耕起作業などを正確に行うことができるプラウ12を備えたトラクタなどの農作業機に関するものである。
【背景技術】
【0002】
プラウなどの作業機をトラクタに装着して、土壌に対して一定の設定耕深による耕起作業を行うトラクタは、作業負荷に応じて作業機を自動的に上下させて安定した作業が行えるドラフト制御機能を備えた構成が知られている。
【0003】
ドラフト制御機能は次のような不具合を防ぐために必要となる。すなわち、トラクタの牽引力を超えた過負荷が作業機に掛かった場合は、前輪が浮き上がり、後輪だけの接地ではトラクタは牽引力を失うことになる。また、トラクタの前輪が浮き上がらない状態での過負荷状態で耕起作業を行う場合に強引にトラクタに作業機を牽引させると作業機を破損してしまうことがある。このようなトラブルを防止するために、トラクタにはドラフト制御機構が搭載されているものがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−169606号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
トラクタには3点リンク機構を介してプラウを装着し、3点リンク機構を油圧式のリフトシリンダによって上下動させることで前記ドラフト制御を行っている。
【0006】
また、プラウを下降させる場合に、操縦部にある作業機の昇降スイッチを下げ側に押し続けることで最大流量の作動油でリフトシリンダを作動させて行うことで、ドラフト制御機構を働かせることができ、特に、すき込み時に作業機が土中に入り難い場合に効果がある。
【0007】
従って、最大流量の作動油でリフトシリンダを作動させる機能は必要であるが、しかし一方で、作業機着脱時等に誤操作により、一気に作業機が降下してしまい作業機を破損したり、あるいは地面上のアスファルト等を損壊するという問題が指摘されている。
【0008】
そこで本発明の課題は、一気にプラウなどの作業機が降下することを防ぐ作業機を装着した農作業機を提供することである。
【課題を解決するための手段】
【0009】
本発明の上記課題は、次の解決手段により解決される。
請求項1記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機の昇降作動用の作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、車速センサ(24)により実質的に車速ゼロ(機種により異なる、一番遅い作業速度、実質的に車体が停止状態)が検知されると、前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0010】
請求項2記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、前後進レバーセンサ(38)による前後進レバー(37)の操作位置が前進側に入っていないことを検知または前後進スイッチ(43)が前進側に入っていないことを検知すると前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0011】
請求項3記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、リフトアームセンサ(49)による検知により作業機が所定高さ(機種により所定高さが異なり、ここでの所定高さは作業可能な高さである。)以下に下げられているとき以外は前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0012】
請求項4記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ24、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、負荷センサ(7)により作業機(12)のドラフト制御が行われない場合には前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0013】
請求項5記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式リフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、副変速「路上」センサ(42)が副変速装置の路上走行位置を検知する場合又は走行モード切替スイッチ(39)が路上走行位置の場合には前記自動すき込み制御機能を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【発明の効果】
【0014】
請求項1記載の発明によれば、車速センサ(24)により実質的に車速ゼロ(機種により異なる、一番遅い作業速度、実質的に車体が停止状態)が検知されると、前記自動すき込み制御を禁止する制御構成を有するので、作業機着脱時などを含めて前記自動すき込み制御が不要な場合にこの制御機能を働かせないようにすることができ、誤操作しても急にリフトアーム(19)が下降して作業機やアスファルトを壊してしまうなどのおそれがなくなる。
【0015】
請求項2記載の発明によれば、前後進レバー(37)が前進側に入っていないことを前後進レバーセンサ(38)が検知すると、自動すき込み制御を禁止するので、実際に必要な場面にのみ自動すき込み制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルトを壊してしまうことがなくなる。
【0016】
請求項3記載の発明によれば、作業機が所定の高さ以下になるようにリフトアーム(19)が下げられているとき以外には自動すき込み制御が機能しないようにすることで、作業機を高い位置から一気に下降させて作業機や道路のアスファルト等を壊してしまう恐れが無い。
【0017】
請求項4記載の発明によれば、ドラフト制御モードでない場合は自動すき込み制御が機能しないようにすることで、実際に必要な場面にのみ前記制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルト等を壊してしまうことが無くなる。
【0018】
請求項5記載の発明によれば、副変速「路上」センサ(42)が副変速装置の路上走行位置を検知する場合、又は走行モード切替スイッチ(39)が路上走行位置にある場合には自動すき込み制御が機能しないようにすることで、路上走行時に誤って作業機昇降スイッチ(23)を下げ側に押しても、一気に作業機が下がってしまうようなことがなくなり、安定した走行が可能になる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施例である乗用型田植機の全体側面図である。
【図2】本発明のトラクタ駆動部分の制御ブロック図である。
【図3】本発明の一実施例の制御フローチャート図である。
【図4】本発明の一実施例の制御フローチャート図である。
【図5】本発明の一実施例の制御フローチャート図である。
【図6】本発明の一実施例の制御フローチャート図である。
【図7】本発明の一実施例の制御フローチャート図である。
【図8】本発明の一実施例の制御フローチャート図である。
【図9】本発明の一実施例の制御フローチャート図である。
【図10】本発明の一実施例の制御フローチャート図である。
【図11】本発明の一実施例の制御フローチャート図である。
【発明を実施するための形態】
【0020】
以下、本発明の一実施例を図面に従って詳述する。
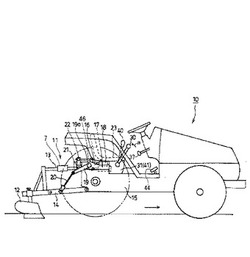
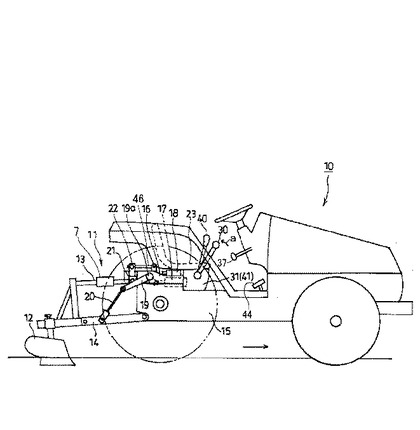
図1はトラクタ本体10の側面図を示し、トラクタ本体10の後部にリンク機構11を介してプラウ等の作業機12が連結されている。前記リンク機構11はトップリンク13と左右のロワリンク14,14とからなり、ミッションケース15の上部にシリンダケース16を設け、該シリンダケース16内にリフトシリンダ17を収容するとともに、該シリンダケース16の上部にリフトコントロールバルブ18を取り付けてある。
【0021】
また、シリンダケース16の左右両側にリフトアーム19,19を枢着し、左右のリフトアーム19,19の先端と左右のロワリンク14,14をリフトロッド20,20により連結する。後述するように、リフトシリンダ17を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド32とリフトシリンダ17を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド33により、リフトコントロールバルブ18が切り替わることによってリフトシリンダ17が伸縮駆動されると、リフトアーム軸19aを中心にリフトアーム19,19がリフトアーム軸19aを中心として上下回動し、リフトロッド20,20を介してロワリンク14,14が上下動する。斯くして、ロワリンク14,14の先端部を回動中心に前記プラウ(作業機)12が昇降する。
【0022】
一方、運転席23の近傍にはプラウなどの作業機12の高さを変更する手段である作業機ポジションレバー30が設けられている。
詳細は省略するが、作業機ポジションレバー30を機体後方側(矢印a(図1))に移動させると、リフトコントロールバルブ18がリフトアーム19を上昇させる位置に切り替わり、リフトシリンダ17が伸張して、リフトアーム19,19が、その回動軸19a,19aを中心に時計周りに回動して前記リフトアーム19,19が上昇する。また、作業機ポジションレバー30を機体前方側に移動させると、リフトアーム19,19が下降する。
【0023】
操縦席近傍にはドラフトコントロールの感度を調整するダイヤルであるドラフト比調整ダイヤル53が配置されており、ドラフト比調整ダイヤル53を左側に回すとポジション側、右側に回すとドラフト側となり、ポジション側(左側)にするほど負荷にかかわらず、設定している耕耘深さを維持する制御となる。また、ドラフト比調整ダイヤル53を右側に回すと負荷優先となる。すなわち、所定以上の負荷が作業機に作用すると、耕深よりも負荷を軽くするために作業機12のリフトシリンダ17を少し上げるように制御する。したがって、圃場の状態やオペレータの好みでドラフト比を調整できる。ポジション側(左)に回すほど、負荷に対する作業機12の昇降変化量が少なくなり、耕す深さを優先する。ドラフト側(右)に回すほど負荷に対する作業機12の昇降変化量が大きくなり、負荷の軽減を図るようにする。
【0024】
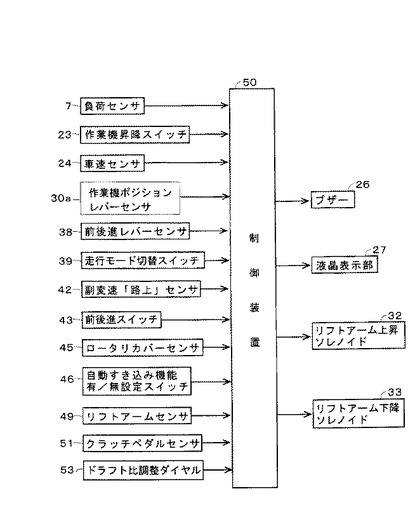
図2には本実施例に関係するトラクタ駆動部分の制御ブロック図を示す。
下げ側と上げ側にシーソー式の作業機昇降スイッチ23とリフトアーム19の昇降角度を検知するリフトアームセンサ49、車速センサ24、作業機ポジションレバー30のセンサ30aなどがコントローラ50に入力され、コントローラ50からはリフトシリンダ17への作動油を入り切りするコントロールバルブ(図示せず)を開閉制御してリフトアーム19の上昇用のソレノイドバルブと下降ソレノイドバルブなどに出力される。
【0025】
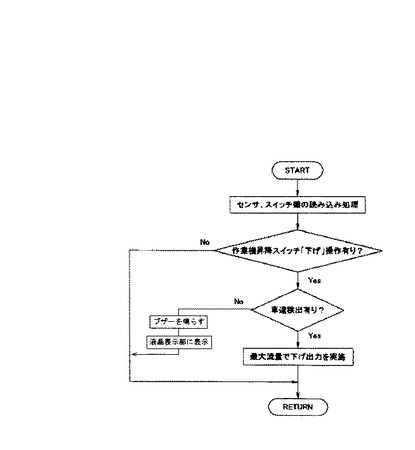
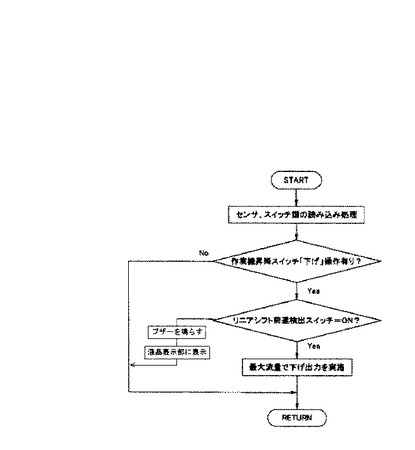
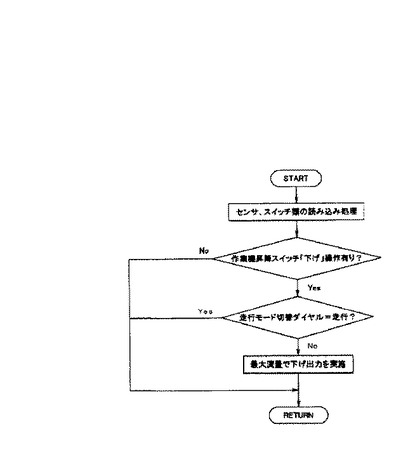
本実施例では図3のフローチャートに示すように、下げ側と上げ側に切替可能なシーソスイッチからなる作業機昇降スイッチ23は操縦部に設けられ、オペレータが作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量で下げ側のリフトアーム19の昇降出力を行う制御機能に関し、所定の車速(例、実質的にゼロ、すなわち、副変速低速で主変速1速など、作業速度で一番遅い速度)を車速センサ24が検出していない場合(実質的に停止状態)は、本機能を禁止する制御構成を備えている。
【0026】
本発明のトラクタは、本来は前記作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17への作動油が最大流量で下降出力を行う自動すき込み制御機能を備えているが、この制御機能はプラウ作業などのドラフト制御において、すき込み時に作業機(プラウ)12が土中に入って行かない場合に、プラウ12を最上げ位置から降下させる時に、プラウ12のすき込み長さ又は時間(プラウ12ではすき込み長さ、即ち、掘る深さが重要になり、プラウ12の昇降速度が一定であるので長さの代わりに時間でも良い)を短く又は素早くする場合に使用すると効果がある。
【0027】
この自動すき込み制御機能は必要であるが、一方で、プラウ12等の作業機の着脱時等に誤操作により、一気にプラウ12等の作業機が降下してしまい作業機を破損すること、あるいは地面の舗装アスファルト等を損壊することなどの恐れがあることが指摘されている。
【0028】
そこで、本実施例では所定速度の車速(機種毎に異なる)以上を検出していない時は自動すき込み制御機能を禁止する。また、作業機着脱時などの必要ない場面では上記制御機能が働かないため、誤操作しても急にリフトアーム19が下降して作業機やアスファルトを壊してしまうことがなくなり、前記車速以上を検出していない時はブザー26を鳴らし、液晶表示部27に警告する内容、例えば「作業機の昇降は作業機ポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0029】
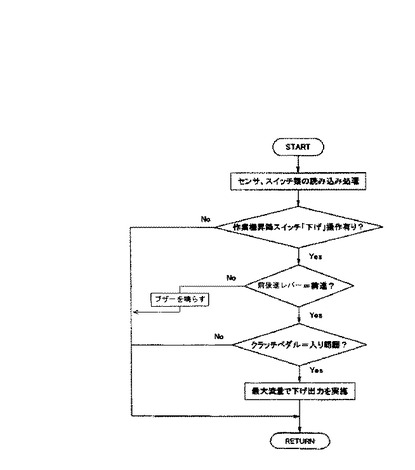
また、上記自動すき込み制御機能において、図4のフローチャートに示すように前記作業機昇降スイッチ23の下げ側スイッチを押し続けると、最大流量で下げ側の昇降出力を行う制御機能に関し、車速センサ24の車速検知の有無に拘わらず(プラウ作業は前進時のみの作業であり、車速センサ値には関係ない。)、前後進レバー37が前進側に入っていないことを前後進レバーセンサ38で検知すると、または前後進スイッチ43が前進側に入っていないことを検知すると、前記制御を禁止する制御構成にしても良い。また、ブザー26を鳴らすだけでなく、さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0030】
これは前述の通り、作業機着脱時等に誤操作により一気に作業機が降下してしまい、作業機を破損するとか舗装アスファルト等を損壊するという問題が指摘されているので、前後進レバー37が前進側にシフトしている時のみ、自動すき込み制御機能を有効とし、前後進レバー37が前進側にシフトしていない時は禁止することで、実際に必要な場面にのみ自動すき込み制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルトを壊してしまうことがなくなる。
【0031】
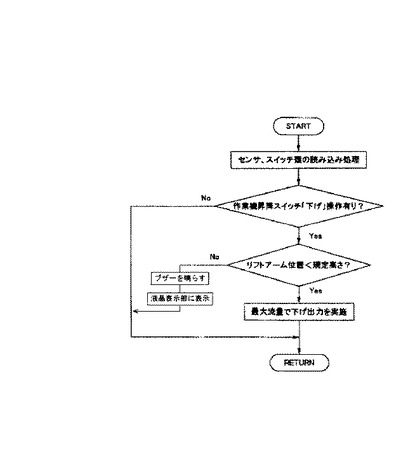
また、作動油の最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能は、図5のフローチャートに示すように、作業機が所定の高さ以下(機種により異なる)になるように、リフトアーム19が下げられている時以外には機能しないようにする。この時、ブザー26を鳴らしてオペレータに注意を促すことが望ましい。さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。これは、作業機を高い位置から一気に下降させて作業機や道路のアスファルト等を壊してしまう恐れがないようにするためである。
【0032】
なお、作業機が所定の高さまで降下していて機体が停止していても、下げを押し続けても一気に降下しないので、車速センサ24の車速検知を関連付けなくても不具合はない。ただし、リフトシリンダ17の油圧のリリーフが作動するので、前記自動すき込み制御に車速センサ24の検出値を参酌してもよい。
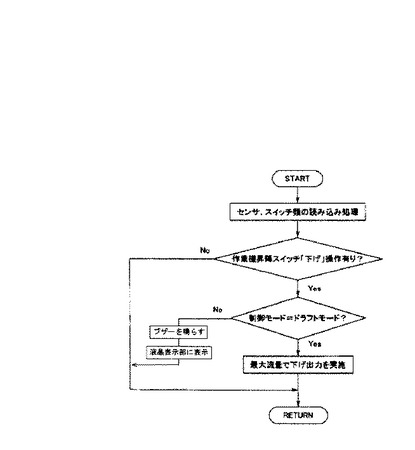
また、前記自動すき込み制御機能は、図6のフローチャートに示すように、制御モードがドラフトモードでない場合は機能しないようにする。
【0033】
なお、制御モードがドラフトモードでない場合はブザー26を鳴らしてオペレータに注意を促すことが望ましい。さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0034】
制御モードがドラフトモード時のみ、自動すき込み制御機能を有効にすることで、実際に必要な場合にのみ、前記制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルト等を壊してしまうことが無いようにするためである。
また、スイッチ関係がドラフトであっても機体が停止中のことがあるので、車速センサ24が車速ゼロを検知しても、直ちに自動すき込み制御機能を無効とはしない。
【0035】
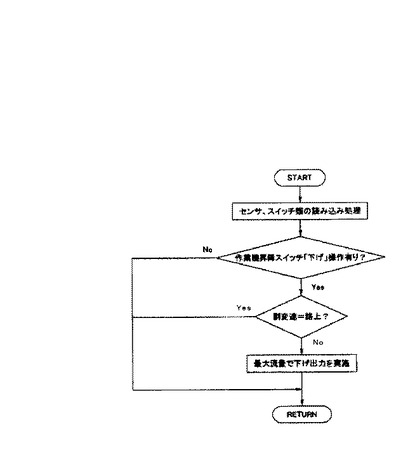
さらに、自動すき込み制御機能は、図7のフローチャートに示すようにミッションケース15内にある副変速装置(図示せず)が路上走行位置にあること(副変速「路上」)を副変速レバー位置センサ42が検知する場合、又は図8のフローチャートに示すように4WD・2WD切換用の走行モード切替スイッチ39が路上走行位置の場合には機能しないようにする。
【0036】
このとき、ブザー26を鳴らし、オペレータに注意を促すことが望ましい。さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0037】
こうして路上走行時に本機能を禁止することで、誤って作業機昇降スイッチ23の「下げ」を押しても、一気に作業機が下がってしまうようなことがなくなり、安定した走行が可能になる。
【0038】
なお、走行モード切替スイッチ39を走行位置にすると、通常は2輪駆動であり、本実施例のトラクタはぬかるみに入ったり、急な坂道、凹凸道を走行すると自動的に4輪駆動になる機能がある。また、ブレーキをかけると自動的に4輪駆動になる。即ち、停止距離が短くなる。さらに、運転中に停止すると4輪駆動状態になる。
また、この場合には副変速レバー(図示せず)が路上位置にあれば、機体の走行停止にかかわらず、自動すき込み制御機能を停止するが、副変速レバーが作業速にあっても自動すき込み制御機能が停止している場合があるので、この時は車速センサ24が車速をゼロと検知しても、自動すき込み制御機能は停止しない。
【0039】
また、自動すき込み制御機能は、図9のフローチャートに示すように前後進スイッチ43が前進側以外に入っている時、例えば後進側に入っている時、又はクラッチペダル44を切っていることをクラッチペダルセンサ51が検知する場合は機能しないようにする。
【0040】
車速センサ24が車速を検知しているが、その車速が前記所定の車速(機種により異なり、その機体が出せる最低速又は最低速に近い速度)以下の微速である場合(この場合を本明細書では実質的に車速ゼロという。)に、そのような微速でもプラウ12を使用する作業を開始しようとするオペレータが操縦中には、前記自動すき込み制御機能を使いたくても使用できない場合がある。このような事態を防ぐために、前後進スイッチ43が前進側に入っている場合、又はクラッチペダル44を接続している場合には、トラクタが走行中であると判断することで、微速からでも本機能を使用できると同時に、必要のない場合は機能しないため、誤操作しても急に作業機が下降して作業機やアスファルトなどを壊してしまうことがなくなる。
なお、前後進レバー37が前進側に入っていない場合、又は前後進スイッチ43が前進側に入っていない場合には、本機能を禁止する。この時、ブザー26を鳴らしオペレータに注意を促すことが望ましい。
【0041】
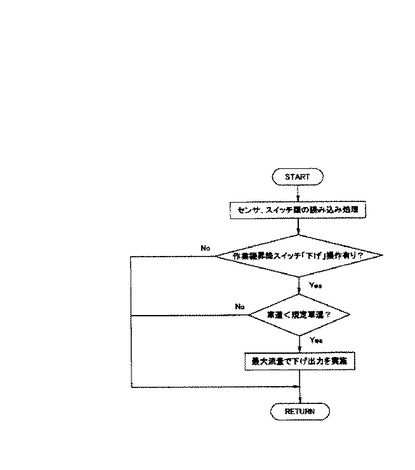
図3に示すフローチャートでは、所定の車速以上で初めて本制御機能を使用できるようにしたが、図10に示すフローチャートのように高速走行時(機種により異なり、当該機種が走行可能な最高速度または最高速度に近い速度)であることを車速センサ24が検出すると、本機能を禁止する制御構成を備えている。これは、たとえば圃場面がある程度軟弱な場合など路上走行速の高速でもプラウ作業を行うオペレータがいるので、副変速が路上の高速位置でも、主変速が低い場合は許容可能としているためである。
この場合は、高速走行時に誤って作業機昇降スイッチ23を下げ側に押しても、一気に作業機が下がってしまうようなことがなくなり、安定した高速走行が可能になる。
【0042】
作業機としてプラウ12に代えて、ロータリー(図示せず)を使用して自動耕深作業(5〜15cmの深さでの耕耘作業)を行う場合には、プラウ12を用いる時に行う前記自動すき込み制御機能は禁止する。ロータリを装着した時はロータリカバーの基部に取り付けたロータリカバーセンサ45が作動するので、該センサ45の検出値に応じて自動耕深作業が可能であるが、同時にロータリカバーセンサ45(図2)がロータリが装着されていることを検出するので、プラウ12を用いる時に行う前記自動すき込み制御機能は禁止することができる。
【0043】
こうしてロータリを使用して行う自動耕深作業時には、リフトアーム19を作動油の最大流量で下降出力を行う機能を禁止することで、誤操作により作業機やアスファルト等が破損することを防ぐ。
【0044】
また、プラウ12を用いる時に行う前記自動すき込み制御機能の有り/無しを選択できるスイッチ46を設けていると、オペレータによってはその好み、又は必要に応じて自動すき込み制御機能を実行するかどうかを選択できる。
【0045】
このスイッチ46は作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能を有効にしたり、無効にすることができるスイッチであり、スイッチ23は不用意に操作したくない場合や好みで選択して使用することができる。
【0046】
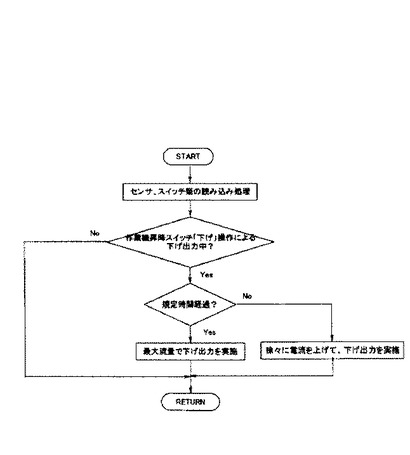
図11に示すフローチャートによる制御は、作業機昇降スイッチ23を下げ側に押し続けている時に規定時間を経過するまでの間、徐々に作業機を下げることができるようにリフトアーム19の下げ用の油量を徐々に上げてリフトアーム19の下げ出力を実施し、一気に最大流量にするのではなく、規定時間で徐々に最大流量にすることができる。
【0047】
この作業機昇降スイッチ23を下げ続ける操作により、作業機昇降スイッチ23を下げ側に押してしまっても、すぐに速く下降するのではなく、徐々に速くなるので、最大流量で一気に下がる状態になる前に、オペレータが誤操作に気付き、操作をやめることができるので、一気に作業機が降下してしまい作業機を破損すること、あるいは舗装道路のアスファルト等を損壊することがなくなる。
【符号の説明】
【0048】
7 負荷センサ 10 トラクタ本体
12 作業機(プラウ) 16 シリンダケース
17 リフトシリンダ 18 リフトコントロールバルブ
19 リフトアーム 19a リフトアーム軸
21 トップリンクブラケット 22 ドラフトセンシングアーム
23 作業機昇降スイッチ 24 車速センサ
26 ブザー 27 液晶表示部
30 ポジションレバー 31 ブラケット
32 リフトアーム上昇ソレノイド 33 リフトアーム下降ソレノイド
37 前後進レバー 38 前後進レバーセンサ
39 走行モード切替スイッチ 40 ドラフトレバー
41 ブラケット 42 副変速「路上」センサ
43 前後進スイッチ 49 リフトアームセンサ
50 制御装置 51 クラッチペダルセンサ
53 ドラフト比調整ダイヤル
【技術分野】
【0001】
本発明は、土壌に対して耕起作業などを正確に行うことができるプラウ12を備えたトラクタなどの農作業機に関するものである。
【背景技術】
【0002】
プラウなどの作業機をトラクタに装着して、土壌に対して一定の設定耕深による耕起作業を行うトラクタは、作業負荷に応じて作業機を自動的に上下させて安定した作業が行えるドラフト制御機能を備えた構成が知られている。
【0003】
ドラフト制御機能は次のような不具合を防ぐために必要となる。すなわち、トラクタの牽引力を超えた過負荷が作業機に掛かった場合は、前輪が浮き上がり、後輪だけの接地ではトラクタは牽引力を失うことになる。また、トラクタの前輪が浮き上がらない状態での過負荷状態で耕起作業を行う場合に強引にトラクタに作業機を牽引させると作業機を破損してしまうことがある。このようなトラブルを防止するために、トラクタにはドラフト制御機構が搭載されているものがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−169606号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
トラクタには3点リンク機構を介してプラウを装着し、3点リンク機構を油圧式のリフトシリンダによって上下動させることで前記ドラフト制御を行っている。
【0006】
また、プラウを下降させる場合に、操縦部にある作業機の昇降スイッチを下げ側に押し続けることで最大流量の作動油でリフトシリンダを作動させて行うことで、ドラフト制御機構を働かせることができ、特に、すき込み時に作業機が土中に入り難い場合に効果がある。
【0007】
従って、最大流量の作動油でリフトシリンダを作動させる機能は必要であるが、しかし一方で、作業機着脱時等に誤操作により、一気に作業機が降下してしまい作業機を破損したり、あるいは地面上のアスファルト等を損壊するという問題が指摘されている。
【0008】
そこで本発明の課題は、一気にプラウなどの作業機が降下することを防ぐ作業機を装着した農作業機を提供することである。
【課題を解決するための手段】
【0009】
本発明の上記課題は、次の解決手段により解決される。
請求項1記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機の昇降作動用の作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、車速センサ(24)により実質的に車速ゼロ(機種により異なる、一番遅い作業速度、実質的に車体が停止状態)が検知されると、前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0010】
請求項2記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、前後進レバーセンサ(38)による前後進レバー(37)の操作位置が前進側に入っていないことを検知または前後進スイッチ(43)が前進側に入っていないことを検知すると前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0011】
請求項3記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、リフトアームセンサ(49)による検知により作業機が所定高さ(機種により所定高さが異なり、ここでの所定高さは作業可能な高さである。)以下に下げられているとき以外は前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0012】
請求項4記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ24、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、負荷センサ(7)により作業機(12)のドラフト制御が行われない場合には前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【0013】
請求項5記載の発明は、トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式リフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、副変速「路上」センサ(42)が副変速装置の路上走行位置を検知する場合又は走行モード切替スイッチ(39)が路上走行位置の場合には前記自動すき込み制御機能を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタである。
【発明の効果】
【0014】
請求項1記載の発明によれば、車速センサ(24)により実質的に車速ゼロ(機種により異なる、一番遅い作業速度、実質的に車体が停止状態)が検知されると、前記自動すき込み制御を禁止する制御構成を有するので、作業機着脱時などを含めて前記自動すき込み制御が不要な場合にこの制御機能を働かせないようにすることができ、誤操作しても急にリフトアーム(19)が下降して作業機やアスファルトを壊してしまうなどのおそれがなくなる。
【0015】
請求項2記載の発明によれば、前後進レバー(37)が前進側に入っていないことを前後進レバーセンサ(38)が検知すると、自動すき込み制御を禁止するので、実際に必要な場面にのみ自動すき込み制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルトを壊してしまうことがなくなる。
【0016】
請求項3記載の発明によれば、作業機が所定の高さ以下になるようにリフトアーム(19)が下げられているとき以外には自動すき込み制御が機能しないようにすることで、作業機を高い位置から一気に下降させて作業機や道路のアスファルト等を壊してしまう恐れが無い。
【0017】
請求項4記載の発明によれば、ドラフト制御モードでない場合は自動すき込み制御が機能しないようにすることで、実際に必要な場面にのみ前記制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルト等を壊してしまうことが無くなる。
【0018】
請求項5記載の発明によれば、副変速「路上」センサ(42)が副変速装置の路上走行位置を検知する場合、又は走行モード切替スイッチ(39)が路上走行位置にある場合には自動すき込み制御が機能しないようにすることで、路上走行時に誤って作業機昇降スイッチ(23)を下げ側に押しても、一気に作業機が下がってしまうようなことがなくなり、安定した走行が可能になる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施例である乗用型田植機の全体側面図である。
【図2】本発明のトラクタ駆動部分の制御ブロック図である。
【図3】本発明の一実施例の制御フローチャート図である。
【図4】本発明の一実施例の制御フローチャート図である。
【図5】本発明の一実施例の制御フローチャート図である。
【図6】本発明の一実施例の制御フローチャート図である。
【図7】本発明の一実施例の制御フローチャート図である。
【図8】本発明の一実施例の制御フローチャート図である。
【図9】本発明の一実施例の制御フローチャート図である。
【図10】本発明の一実施例の制御フローチャート図である。
【図11】本発明の一実施例の制御フローチャート図である。
【発明を実施するための形態】
【0020】
以下、本発明の一実施例を図面に従って詳述する。
図1はトラクタ本体10の側面図を示し、トラクタ本体10の後部にリンク機構11を介してプラウ等の作業機12が連結されている。前記リンク機構11はトップリンク13と左右のロワリンク14,14とからなり、ミッションケース15の上部にシリンダケース16を設け、該シリンダケース16内にリフトシリンダ17を収容するとともに、該シリンダケース16の上部にリフトコントロールバルブ18を取り付けてある。
【0021】
また、シリンダケース16の左右両側にリフトアーム19,19を枢着し、左右のリフトアーム19,19の先端と左右のロワリンク14,14をリフトロッド20,20により連結する。後述するように、リフトシリンダ17を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド32とリフトシリンダ17を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド33により、リフトコントロールバルブ18が切り替わることによってリフトシリンダ17が伸縮駆動されると、リフトアーム軸19aを中心にリフトアーム19,19がリフトアーム軸19aを中心として上下回動し、リフトロッド20,20を介してロワリンク14,14が上下動する。斯くして、ロワリンク14,14の先端部を回動中心に前記プラウ(作業機)12が昇降する。
【0022】
一方、運転席23の近傍にはプラウなどの作業機12の高さを変更する手段である作業機ポジションレバー30が設けられている。
詳細は省略するが、作業機ポジションレバー30を機体後方側(矢印a(図1))に移動させると、リフトコントロールバルブ18がリフトアーム19を上昇させる位置に切り替わり、リフトシリンダ17が伸張して、リフトアーム19,19が、その回動軸19a,19aを中心に時計周りに回動して前記リフトアーム19,19が上昇する。また、作業機ポジションレバー30を機体前方側に移動させると、リフトアーム19,19が下降する。
【0023】
操縦席近傍にはドラフトコントロールの感度を調整するダイヤルであるドラフト比調整ダイヤル53が配置されており、ドラフト比調整ダイヤル53を左側に回すとポジション側、右側に回すとドラフト側となり、ポジション側(左側)にするほど負荷にかかわらず、設定している耕耘深さを維持する制御となる。また、ドラフト比調整ダイヤル53を右側に回すと負荷優先となる。すなわち、所定以上の負荷が作業機に作用すると、耕深よりも負荷を軽くするために作業機12のリフトシリンダ17を少し上げるように制御する。したがって、圃場の状態やオペレータの好みでドラフト比を調整できる。ポジション側(左)に回すほど、負荷に対する作業機12の昇降変化量が少なくなり、耕す深さを優先する。ドラフト側(右)に回すほど負荷に対する作業機12の昇降変化量が大きくなり、負荷の軽減を図るようにする。
【0024】
図2には本実施例に関係するトラクタ駆動部分の制御ブロック図を示す。
下げ側と上げ側にシーソー式の作業機昇降スイッチ23とリフトアーム19の昇降角度を検知するリフトアームセンサ49、車速センサ24、作業機ポジションレバー30のセンサ30aなどがコントローラ50に入力され、コントローラ50からはリフトシリンダ17への作動油を入り切りするコントロールバルブ(図示せず)を開閉制御してリフトアーム19の上昇用のソレノイドバルブと下降ソレノイドバルブなどに出力される。
【0025】
本実施例では図3のフローチャートに示すように、下げ側と上げ側に切替可能なシーソスイッチからなる作業機昇降スイッチ23は操縦部に設けられ、オペレータが作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量で下げ側のリフトアーム19の昇降出力を行う制御機能に関し、所定の車速(例、実質的にゼロ、すなわち、副変速低速で主変速1速など、作業速度で一番遅い速度)を車速センサ24が検出していない場合(実質的に停止状態)は、本機能を禁止する制御構成を備えている。
【0026】
本発明のトラクタは、本来は前記作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17への作動油が最大流量で下降出力を行う自動すき込み制御機能を備えているが、この制御機能はプラウ作業などのドラフト制御において、すき込み時に作業機(プラウ)12が土中に入って行かない場合に、プラウ12を最上げ位置から降下させる時に、プラウ12のすき込み長さ又は時間(プラウ12ではすき込み長さ、即ち、掘る深さが重要になり、プラウ12の昇降速度が一定であるので長さの代わりに時間でも良い)を短く又は素早くする場合に使用すると効果がある。
【0027】
この自動すき込み制御機能は必要であるが、一方で、プラウ12等の作業機の着脱時等に誤操作により、一気にプラウ12等の作業機が降下してしまい作業機を破損すること、あるいは地面の舗装アスファルト等を損壊することなどの恐れがあることが指摘されている。
【0028】
そこで、本実施例では所定速度の車速(機種毎に異なる)以上を検出していない時は自動すき込み制御機能を禁止する。また、作業機着脱時などの必要ない場面では上記制御機能が働かないため、誤操作しても急にリフトアーム19が下降して作業機やアスファルトを壊してしまうことがなくなり、前記車速以上を検出していない時はブザー26を鳴らし、液晶表示部27に警告する内容、例えば「作業機の昇降は作業機ポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0029】
また、上記自動すき込み制御機能において、図4のフローチャートに示すように前記作業機昇降スイッチ23の下げ側スイッチを押し続けると、最大流量で下げ側の昇降出力を行う制御機能に関し、車速センサ24の車速検知の有無に拘わらず(プラウ作業は前進時のみの作業であり、車速センサ値には関係ない。)、前後進レバー37が前進側に入っていないことを前後進レバーセンサ38で検知すると、または前後進スイッチ43が前進側に入っていないことを検知すると、前記制御を禁止する制御構成にしても良い。また、ブザー26を鳴らすだけでなく、さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0030】
これは前述の通り、作業機着脱時等に誤操作により一気に作業機が降下してしまい、作業機を破損するとか舗装アスファルト等を損壊するという問題が指摘されているので、前後進レバー37が前進側にシフトしている時のみ、自動すき込み制御機能を有効とし、前後進レバー37が前進側にシフトしていない時は禁止することで、実際に必要な場面にのみ自動すき込み制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルトを壊してしまうことがなくなる。
【0031】
また、作動油の最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能は、図5のフローチャートに示すように、作業機が所定の高さ以下(機種により異なる)になるように、リフトアーム19が下げられている時以外には機能しないようにする。この時、ブザー26を鳴らしてオペレータに注意を促すことが望ましい。さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。これは、作業機を高い位置から一気に下降させて作業機や道路のアスファルト等を壊してしまう恐れがないようにするためである。
【0032】
なお、作業機が所定の高さまで降下していて機体が停止していても、下げを押し続けても一気に降下しないので、車速センサ24の車速検知を関連付けなくても不具合はない。ただし、リフトシリンダ17の油圧のリリーフが作動するので、前記自動すき込み制御に車速センサ24の検出値を参酌してもよい。
また、前記自動すき込み制御機能は、図6のフローチャートに示すように、制御モードがドラフトモードでない場合は機能しないようにする。
【0033】
なお、制御モードがドラフトモードでない場合はブザー26を鳴らしてオペレータに注意を促すことが望ましい。さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0034】
制御モードがドラフトモード時のみ、自動すき込み制御機能を有効にすることで、実際に必要な場合にのみ、前記制御機能を働かせることができる。また、作業機着脱時などの必要ない場面では機能しないため、誤操作しても急に下降して作業機やアスファルト等を壊してしまうことが無いようにするためである。
また、スイッチ関係がドラフトであっても機体が停止中のことがあるので、車速センサ24が車速ゼロを検知しても、直ちに自動すき込み制御機能を無効とはしない。
【0035】
さらに、自動すき込み制御機能は、図7のフローチャートに示すようにミッションケース15内にある副変速装置(図示せず)が路上走行位置にあること(副変速「路上」)を副変速レバー位置センサ42が検知する場合、又は図8のフローチャートに示すように4WD・2WD切換用の走行モード切替スイッチ39が路上走行位置の場合には機能しないようにする。
【0036】
このとき、ブザー26を鳴らし、オペレータに注意を促すことが望ましい。さらに、操縦部に設けた液晶表示部27に警告する内容、例えば「作業機の昇降はポジションレバー30で行って下さい。」などを表示することで、さらに安全になる。
【0037】
こうして路上走行時に本機能を禁止することで、誤って作業機昇降スイッチ23の「下げ」を押しても、一気に作業機が下がってしまうようなことがなくなり、安定した走行が可能になる。
【0038】
なお、走行モード切替スイッチ39を走行位置にすると、通常は2輪駆動であり、本実施例のトラクタはぬかるみに入ったり、急な坂道、凹凸道を走行すると自動的に4輪駆動になる機能がある。また、ブレーキをかけると自動的に4輪駆動になる。即ち、停止距離が短くなる。さらに、運転中に停止すると4輪駆動状態になる。
また、この場合には副変速レバー(図示せず)が路上位置にあれば、機体の走行停止にかかわらず、自動すき込み制御機能を停止するが、副変速レバーが作業速にあっても自動すき込み制御機能が停止している場合があるので、この時は車速センサ24が車速をゼロと検知しても、自動すき込み制御機能は停止しない。
【0039】
また、自動すき込み制御機能は、図9のフローチャートに示すように前後進スイッチ43が前進側以外に入っている時、例えば後進側に入っている時、又はクラッチペダル44を切っていることをクラッチペダルセンサ51が検知する場合は機能しないようにする。
【0040】
車速センサ24が車速を検知しているが、その車速が前記所定の車速(機種により異なり、その機体が出せる最低速又は最低速に近い速度)以下の微速である場合(この場合を本明細書では実質的に車速ゼロという。)に、そのような微速でもプラウ12を使用する作業を開始しようとするオペレータが操縦中には、前記自動すき込み制御機能を使いたくても使用できない場合がある。このような事態を防ぐために、前後進スイッチ43が前進側に入っている場合、又はクラッチペダル44を接続している場合には、トラクタが走行中であると判断することで、微速からでも本機能を使用できると同時に、必要のない場合は機能しないため、誤操作しても急に作業機が下降して作業機やアスファルトなどを壊してしまうことがなくなる。
なお、前後進レバー37が前進側に入っていない場合、又は前後進スイッチ43が前進側に入っていない場合には、本機能を禁止する。この時、ブザー26を鳴らしオペレータに注意を促すことが望ましい。
【0041】
図3に示すフローチャートでは、所定の車速以上で初めて本制御機能を使用できるようにしたが、図10に示すフローチャートのように高速走行時(機種により異なり、当該機種が走行可能な最高速度または最高速度に近い速度)であることを車速センサ24が検出すると、本機能を禁止する制御構成を備えている。これは、たとえば圃場面がある程度軟弱な場合など路上走行速の高速でもプラウ作業を行うオペレータがいるので、副変速が路上の高速位置でも、主変速が低い場合は許容可能としているためである。
この場合は、高速走行時に誤って作業機昇降スイッチ23を下げ側に押しても、一気に作業機が下がってしまうようなことがなくなり、安定した高速走行が可能になる。
【0042】
作業機としてプラウ12に代えて、ロータリー(図示せず)を使用して自動耕深作業(5〜15cmの深さでの耕耘作業)を行う場合には、プラウ12を用いる時に行う前記自動すき込み制御機能は禁止する。ロータリを装着した時はロータリカバーの基部に取り付けたロータリカバーセンサ45が作動するので、該センサ45の検出値に応じて自動耕深作業が可能であるが、同時にロータリカバーセンサ45(図2)がロータリが装着されていることを検出するので、プラウ12を用いる時に行う前記自動すき込み制御機能は禁止することができる。
【0043】
こうしてロータリを使用して行う自動耕深作業時には、リフトアーム19を作動油の最大流量で下降出力を行う機能を禁止することで、誤操作により作業機やアスファルト等が破損することを防ぐ。
【0044】
また、プラウ12を用いる時に行う前記自動すき込み制御機能の有り/無しを選択できるスイッチ46を設けていると、オペレータによってはその好み、又は必要に応じて自動すき込み制御機能を実行するかどうかを選択できる。
【0045】
このスイッチ46は作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能を有効にしたり、無効にすることができるスイッチであり、スイッチ23は不用意に操作したくない場合や好みで選択して使用することができる。
【0046】
図11に示すフローチャートによる制御は、作業機昇降スイッチ23を下げ側に押し続けている時に規定時間を経過するまでの間、徐々に作業機を下げることができるようにリフトアーム19の下げ用の油量を徐々に上げてリフトアーム19の下げ出力を実施し、一気に最大流量にするのではなく、規定時間で徐々に最大流量にすることができる。
【0047】
この作業機昇降スイッチ23を下げ続ける操作により、作業機昇降スイッチ23を下げ側に押してしまっても、すぐに速く下降するのではなく、徐々に速くなるので、最大流量で一気に下がる状態になる前に、オペレータが誤操作に気付き、操作をやめることができるので、一気に作業機が降下してしまい作業機を破損すること、あるいは舗装道路のアスファルト等を損壊することがなくなる。
【符号の説明】
【0048】
7 負荷センサ 10 トラクタ本体
12 作業機(プラウ) 16 シリンダケース
17 リフトシリンダ 18 リフトコントロールバルブ
19 リフトアーム 19a リフトアーム軸
21 トップリンクブラケット 22 ドラフトセンシングアーム
23 作業機昇降スイッチ 24 車速センサ
26 ブザー 27 液晶表示部
30 ポジションレバー 31 ブラケット
32 リフトアーム上昇ソレノイド 33 リフトアーム下降ソレノイド
37 前後進レバー 38 前後進レバーセンサ
39 走行モード切替スイッチ 40 ドラフトレバー
41 ブラケット 42 副変速「路上」センサ
43 前後進スイッチ 49 リフトアームセンサ
50 制御装置 51 クラッチペダルセンサ
53 ドラフト比調整ダイヤル
【特許請求の範囲】
【請求項1】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機の昇降作動用の作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
車速センサ(24)により実質的に車速ゼロが検知されると、前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項2】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
前後進レバーセンサ(38)による前後進レバー(37)の操作位置が前進側に入っていないことを検知または前後進スイッチ(43)が前進側に入っていないことを検知すると前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項3】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
リフトアームセンサ(49)による検知により作業機が所定高さ以下に下げられているとき以外は前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項4】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
負荷センサ(7)により作業機(12)のドラフト制御が行われない場合には前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項5】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
副変速「路上」センサ(42)が副変速装置の路上走行位置を検知する場合又は走行モード切替スイッチ(39)が路上走行位置の場合には前記自動すき込み制御機能を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項1】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機の昇降作動用の作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
車速センサ(24)により実質的に車速ゼロが検知されると、前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項2】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
前後進レバーセンサ(38)による前後進レバー(37)の操作位置が前進側に入っていないことを検知または前後進スイッチ(43)が前進側に入っていないことを検知すると前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項3】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
リフトアームセンサ(49)による検知により作業機が所定高さ以下に下げられているとき以外は前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項4】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
負荷センサ(7)により作業機(12)のドラフト制御が行われない場合には前記自動すき込み制御を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【請求項5】
トラクタ本体(10)の後部に装着した作業機(12)の昇降用の油圧式のリフトシリンダ(17)、該リフトシリンダ(17)を上昇側に作動させる作動油を送り出すリフトアーム上昇ソレノイド(32)、リフトシリンダ(17)を下降側に作動させる作動油を送り出すリフトアーム下降ソレノイド(33)、リフトシリンダ(17)の伸縮により昇降するリフトアーム(19)、作業機昇降スイッチ(23)、リフトアーム(19)の昇降を検知するリフトアームセンサ(49)、作業機のドラフト制御を行う場合の負荷センサ(7)、トラクタ本体(10)の車速を検知する車速センサ(24)、トラクタ本体(10)の前後進を制御する前後進レバー(37)又は前後進スイッチ(43)、前後進レバー(37)の操作位置を検知する前後進レバーセンサ(38)、トラクタ本体(10)の走行変速装置、該走行変速装置の走行モードを切り替える走行モード切替スイッチ(39)を備えたトラクタにおいて、
作業機昇降スイッチ(23)を下げ側に押し続けるとリフトシリンダ(17)の作動油が最大流量でリフトアーム(19)を下げ側に出力する自動すき込み制御機能と、
副変速「路上」センサ(42)が副変速装置の路上走行位置を検知する場合又は走行モード切替スイッチ(39)が路上走行位置の場合には前記自動すき込み制御機能を禁止する制御機能を有する制御装置(50)を備えたことを特徴とするトラクタ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−111010(P2013−111010A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259860(P2011−259860)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]