
運転シミュレータのCG表示制御システムおよび方法
【課題】運転操作に応じて仮想空間の景観をCGで表現する運転シミュレータにおいて、運転台からの通信に異常が生じても、正確かつ違和感のない景観映像の表示を実現する。
【解決手段】運転台1からの入力操作によって車両運動計算処理装置2で生成した車両の速度情報を、一定送信周期毎にCG表示制御装置4に送信し、この速度情報を使ってCG表示装置5上での視点位置を滑らかに移動させている。
ここで、運転台1からの入力操作によって車両運動計算処理装置2で生成した車両の第1の位置情報をも、CG表示制御装置4へ送信する。CG表示制御装置4では、その内部で演算した第2の現在位置情報と、受信した前記第1の位置情報との偏差を使用して、CG表示映像移動用の速度指令を補正する。また、受信した位置情報の変遷から通信異常を検知し、前回の送信周期での速度情報を用いて表示映像をつなぎ、正確かつ違和感のない景観映像を表示する。
【解決手段】運転台1からの入力操作によって車両運動計算処理装置2で生成した車両の速度情報を、一定送信周期毎にCG表示制御装置4に送信し、この速度情報を使ってCG表示装置5上での視点位置を滑らかに移動させている。
ここで、運転台1からの入力操作によって車両運動計算処理装置2で生成した車両の第1の位置情報をも、CG表示制御装置4へ送信する。CG表示制御装置4では、その内部で演算した第2の現在位置情報と、受信した前記第1の位置情報との偏差を使用して、CG表示映像移動用の速度指令を補正する。また、受信した位置情報の変遷から通信異常を検知し、前回の送信周期での速度情報を用いて表示映像をつなぎ、正確かつ違和感のない景観映像を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両走行シミュレータにおいて、仮想車両の運転台からの景観を表示するCG表示制御システムおよび方法に関するものである。
【背景技術】
【0002】
従来の車両運転シミュレータでは、運転台で操作される入力操作に応じて仮想空間での視点位置を移動させることで臨場感を再現している。
【0003】
このようなシステムの例は、特許文献1に見られる。
【0004】
【特許文献1】特開平9−311619号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来の車両運転シミュレータを用いて、より運転感覚が現実の車両と近いような車両運転シミュレータを実現する場合には、車両運動特性を考慮した加速度、速度、位置を計算する車両運動計算装置を追加している。そして、加速度、速度および位置をリアルタイムで計算し、車両の運転台から見える画像を再現する表示装置に遅れなく、正確に運転操作基く速度情報等を伝達する必要がある。
【0006】
従来の車両運転シミュレータでは、CG表示制御装置側での演算精度の不足や、運転台システム側からCG表示制御装置側への通信遅れやエラーがあると、運転操作に基く本来の車両位置と、景観表示のための車両位置にずれが生じるという問題がある。
【0007】
本発明の目的は、運転操作に基く車両の現在位置と、CG表示装置で表示する景観の視点となる車両の現在位置の一致精度を向上させ、訓練者に違和感を感じさせないCG表示が可能な車両運転シミュレータを提供することである。
【課題を解決するための手段】
【0008】
本発明はその一面において、運転台に設置され移動体の加減速に関連する指令を入力する操作手段と、この操作手段から入力された指令に基づいて移動体の速度情報および現在位置情報(以下、第1の現在位置情報と言う)を演算する車両運動計算処理装置と、この車両運動計算処理装置と通信手段で結合されたCG表示制御装置と、前記車両運動計算処理装置で演算した移動体の前記速度情報を前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記速度情報に応じて移動する移動体の現在位置情報(以下、第2の現在位置情報と言う)からの視点で、CGで作成された仮想空間の景観映像を表示するCG表示装置とを備えた運転シミュレータのCG表示制御システムにおいて、前記車両運動計算処理装置で生成された前記速度情報だけでなく移動体の前記第1の現在位置情報をも、前記通信手段を通して前記CG表示制御装置へ送信し、CG表示の制御をバックアップするようにしたことを特徴とする。
【0009】
本発明の望ましい実施態様においては、前記バックアップとしては、移動体の前記第1第2の現在位置情報を比較し、この比較結果に基いて、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックすることを特徴とする。
【0010】
本発明の他の望ましい実施態様においては、前記バックアップとして、移動体の前記速度情報が所定の速度以上であり、かつ前記CG表示制御装置で受信した前記第1の現在位置情報に所定の変化が存在しないとき、前記通信手段の異常を検出することを特徴とする。
【0011】
また、本発明の他の望ましい実施態様においては、前記CG表示制御装置で一つ前の送信周期で受信した速度情報を記憶し、通信異常を検出したとき、記憶した前記一つ前の通信周期に受信した速度情報に基いてCG表示用の仮想現在位置を演算し、この仮想現在位置に基いてCG景観映像を表示させる映像つなぎを行うことを特徴とする。
【発明の効果】
【0012】
本発明の望ましい実施態様によれば、運転台からの操作と車両の走行環境に応じた物理運動の結果生じるある時刻の速度、位置と実時間で一致度の高い地点での映像を表示し、仮想画面に、現実に運転している感覚により近い景観を表現することができる。
【0013】
また、本発明の望ましい実施態様によれば、通信異常が生じた場合にも、運転台での操作との一致度が高く、違和感のないCG景観表示を継続できる運転シミュレータを実現できる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施例による運転シミュレータのCG表示制御システムを、添付図面を参照して説明する。
【0015】
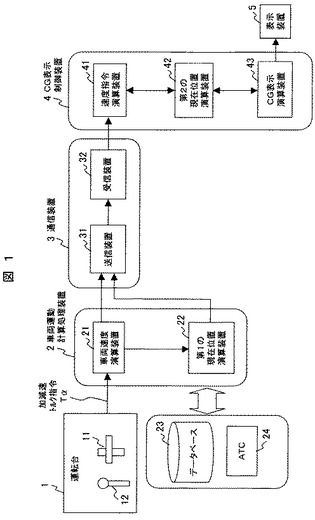
図1は、本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。運転シミュレータは、訓練者が運転操作を行う運転台1、その操作内容を情報変換する車両運動計算処理装置2、通信装置3、車両運動に応じた景観映像を表示させるCG表示制御装置4、および訓練者に仮想景観を示す表示装置5で構成されている。
【0016】
運転台1には、鉄道列車におけるノッチ操作や、自動車におけるアクセルやブレーキ操作などを行う操作手段11があり、訓練者(運転者)12がこの操作手段を取り扱う。
【0017】
車両運動計算処理装置2は、運転台1の操作手段11の操作に基く加減速度トルク指令Tαに応じて、車両の速度を演算する車両速度演算装置21と、車両の現在位置を演算する第1の現在位置演算装置22を備えている。この演算のために、運転台システムとしては、車両速度演算装置21での演算のための外部環境データを提供する外部環境データベース23や、車両自動制御装置(ATC)24などを備えている。
【0018】
通常、演算された車両の速度情報と第1の現在位置情報は、運転席のメータ表示などに利用される。
【0019】
本発明においては、従来からの車両の速度情報だけではなく、現在位置情報をも通信装置3を通してCG表示制御装置4へ送信する。
【0020】
通信装置3は、送信装置31と、受信装置32から構成される。
【0021】
CG表示制御装置4は、主として、景観映像を移動させるための速度指令を演算する速度指令演算装置41、その速度指令に基き車両の現在位置を演算する第2の現在位置演算装置42、およびCG表示演算装置43を備えている。その他の装置については後述する。
【0022】
表示装置5は、前記速度指令に応じて移動する前記第2の現在位置の運転席から見た景観映像を訓練者に対して表示する。
【0023】
次に、図1の各装置の動作について説明する。まず、訓練者12は、運転台1に座って、車両の加減速トルク指令Tαを入力する操作手段11を操作する。操作手段11は、レバーまたはペダルによる人間の操作から、その入力レベルを電気信号に変換して車両運動計算処理装置2に信号を伝達する。車両が軌道上を走行する場合には、この加減速トルク指令Tαが主要入力信号となる。軌道の分岐やスイッチバックなどの入力は、それに相当する入力と対応した装置が従来技術により制御を分担するものとし、ここでは、加減速トルク指令Tαの入力についてのみ説明する。
【0024】
運転台のレバーの設定角やアクセルの踏み込み量により入力された加減速トルク指令Tα信号に対して、車両の運動は軌道の傾斜、車両のエンジンやモータなどの性能、車両や搭載物の質量、風や空気、路面の抵抗などにより加速度が決まる。これらのパラメータを運動方程式に代入して車両の加速度が計算される。この加速度により、車両速度演算装置21によって、各時刻における車両の速度が計算できる。また、第1の現在位置演算装置22では、各時刻の速度を積分することで、ある時刻における車両の位置が計算される。
【0025】
データベース23には、軌道の各地点における勾配、カーブ曲率、路面の摩擦係数、時刻と軌道位置に応じた風速、天候、搭載物の質量変化などのデータが収納されている。このデータベースから、軌道位置、時刻を参照値としてデータを引き出し、その時刻の車両に加わる抵抗力、加速力を計算し、その時刻、軌道位置における車両の加速度、速度、位置が演算される。
【0026】
車両運動計算処理装置2から、送信装置31には、前述したように、各時刻における車両の速度情報だけでなく、車両の第1の現在位置のデータが送信される。この実施例では、軌道上を走行する車両であるため、速度、位置ともにスカラ量であり2つの数値で送信される。
【0027】
送信装置31に送られたデータは受信装置32に伝送される。
【0028】
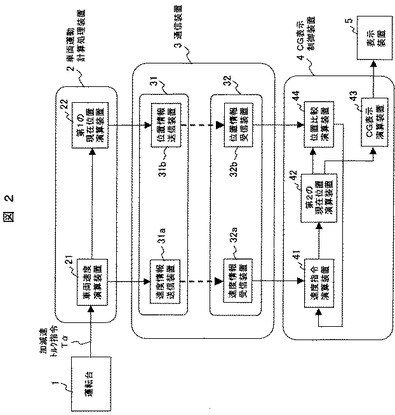
図2は、図1におけるCG表示制御装置4側の受信装置32に送られたデータの詳細な処理を示す制御ブロック図である。
【0029】
まず、受信した車両の速度情報に基いて、景観映像を移動するための速度指令を、速度指令演算装置41にて演算し、第2の位置演算装置42にて現在の車両位置を演算し、CG表示演算装置43により表示装置5を制御する点は、従来と同様である。
【0030】
本実施例においては、運転台システム側の車両運動計算処理装置2から、車両の大の現在位置情報も送信されており、受信した車両の第1の現在位置データと、CG表示制御装置4内の第2の位置演算装置42で計算され、現在表示している第2の現在位置データの比較を行う。位置比較演算装置44によって得られたこれら第1第2の現在位置データの誤差に応じて、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックする補正手段を備えている。図2では、景観移動用の速度指令値を補正するように、速度指令演算装置41へフィードバックを行っている。このようにして、運転台システム側の演算能力に余裕のあるコンピュータで演算した精度の高い第1の現在位置情報に一致したCG表示制御装置4内の仮想位置の景観を表示装置5に表示することができる。
【0031】
運転台システム側で高精度に演算された第1の現在位置情報と、CG表示制御装置4内の第2の現在位置情報が高精度に一致することで、坂道での加速感覚、信号に対する停止感覚、路面の凸凹と車体の振動の感覚まで一致し、より臨場感のある訓練を実現できる。
【0032】
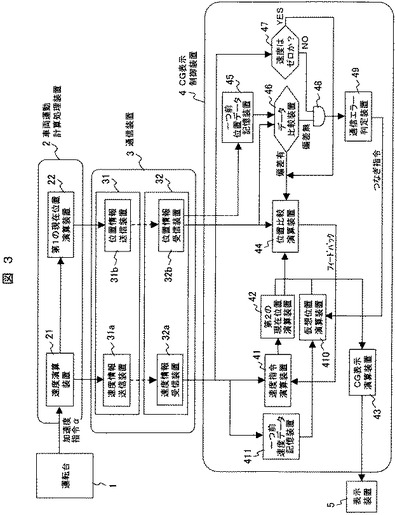
図3は、通信異常が生じた場合に適した本発明の第2の実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【0033】
重複説明を避けるため、図2と相違する点のみについて述べる。
【0034】
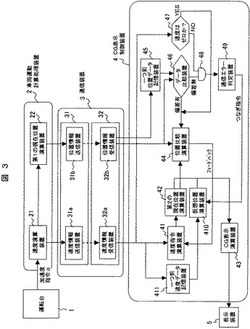
一つ前の送信周期で受信した一つ前位置データ記憶装置45の出力と、今回受信した位置データとが、データ比較装置46で常時比較されている。速度判定部47では、現在の速度データを監視しており、有速度状態であれば、アンド論理回路48に一入力を与える。有速度状態であれば、当然に前回の車両位置と今回の車両位置は異なるはずであり、これらの間に差が無かったならば、アンド論理回路48の出力が生じ、通信エラー判定装置49にて通信異常が検出される。通信エラー判定装置49の出力である「つなぎ指令」は、仮想位置演算装置410に出力を促す。仮想位置演算装置410は、一つ前の送信周期に受信した速度情報を記憶している一つ前速度データ記憶装置411の速度情報を入力しており、この速度情報によって仮想の現在位置を演算し、CG表示演算装置43に出力する。極めて短時間の一送信周期の間では、車両速度に大きな差は無く、景観映像にも大きな差は生じない。したがって、ごく短時間の通信異常に関しては、訓練者に違和感を感じさせること無く、次の、送信周期で分らぬ間に正常に復帰していることとなる。
【0035】
なお、多数の送信周期に亘る長い通信障害が発生した場合には、通信エラーの判定の連続によってこれを検知し、訓練者にアナウンスしてCG表示を打切ることが望ましい。
【0036】
このように、本実施例によれば、通信切断の直前の速度を基に、仮想的な位置指令値を計算する仕組みを用意しているため、短期間の通信障害が発生しても、CG表示制御装置4内の景観の移動が継続される。このため、通信が復旧したときの位置誤差に基くフィードバックが働き、運転台の距離計とCG景観映像の位置が一致するように補正され、通信障害があっても臨場感を失わないで訓練できる効果がある。
【0037】
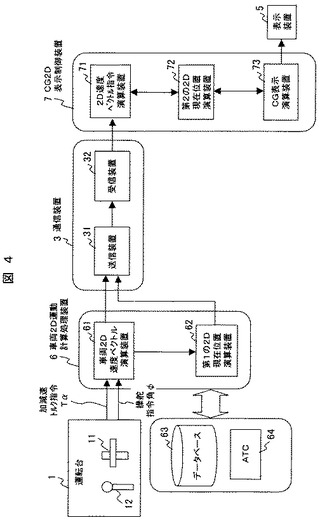
図4は、自動車のように、車両が2次元(2D)平面上を移動する場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【0038】
平面上を走行する車両(車や船舶など)の場合の車両2D運動計算処理装置6の場合は、平面上を走行するため、制御入力は加減速トルクTαと操舵指令角φの2つとなる。時々刻々の操舵角と速度ベクトルにより微少時間後の車両の位置と向きが決定される。
【0039】
運転台のレバーの設定角やアクセルにより入力された信号と、操舵機によって入力された操舵角信号に対して、車両の運動は、車両のエンジンやモータなどの性能、車両や搭載物の質量、風や空気、路面、海面の抵抗などにより加速度及び進行方向が決まる。車両の2D速度ベクトル演算装置61では、これらのパラメータを運動方程式に代入して車両の加速度ベクトルを計算し、この加速度ベクトルにより、各時刻における車両の速度ベクトルを計算できる。また、第1の2D現在位置演算装置62では、各時刻の速度ベクトルを積分することで、ある時刻における車両の第1の2D現在位置と向きが計算される。
【0040】
データベース63には、平面上の各地点における勾配、路面の摩擦係数、時刻と軌道位置に応じた風速、天候、搭載物の質量変化などのデータが収納されている。このデータベース63から、平面上の位置、時刻を参照値としてデータを引き出し、その時刻の車両に加わる抵抗力、加速力を計算し、その時刻、平面上の位置における車両の加速度ベクトル、速度ベクトル、平面上の位置を決定する。
【0041】
同様に、CG2D表示制御装置7でも、2次元ベクトルにて演算・制御が実行される。
【0042】
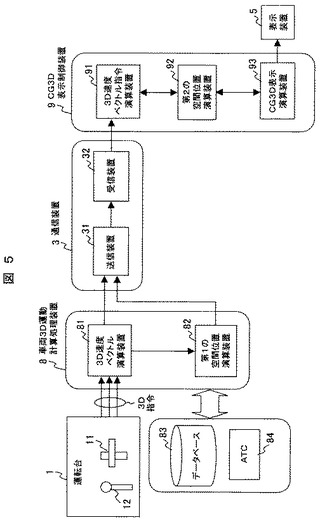
図5は、飛行機のように、運転者の操作に応じて3次元(3D)空間内を移動する移動体の場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。3次元空間内を移動する移動体の場合には、前述の平面上を移動する車両の場合に加えて、平面と直角を成す上下方向への加速度ベクトルを付加した3D指令に応じ、3次元(3D)運動方程式に基づく空間内の速度ベクトルが決定される。
【0043】
図4の場合には、平面上を移動するため、速度、位置はともにx、y成分を持ち4つの数値で送信されるが、図5の場合は空間内を移動するため、位置、速度はそれぞれ3つの(3D)成分を持ち6個の数値で伝送される。これに応じて、3D運動計算処理装置8内の車両の3D速度ベクトル演算装置81では、これらのパラメータを運動方程式に代入して移動体の3D加速度ベクトルを計算し、この3D加速度ベクトルにより、各時刻における移動体の速度ベクトルを計算する。また、第1の3D現在位置演算装置82でも、各時刻の3D速度ベクトルを積分することで、ある時刻における移動体の第1の3D現在位置と向きが計算される。
【0044】
以上説明したように、本実施例の運転シミュレータのCG表示制御システムによれば、運転台からの操作と移動体の走行/飛行環境に応じた物理運動の結果生じるある時刻の速度、位置と実時間で一致した地点の映像を常に表示するようにCGを制御できる。したがって、現実に運転している感覚をそのまま仮想画面に表現することができる。
【図面の簡単な説明】
【0045】
【図1】本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【図2】図1におけるCG表示制御装置4側の受信装置32に送られたデータの詳細な処理を示す制御ブロック図である。
【図3】通信異常が生じた場合に適した本発明の第2の実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【図4】車両が2次元(2D)平面上を移動する場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【図5】運転者の操作に応じて3次元(3D)空間内を移動する移動体の場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【符号の説明】
【0046】
1…運転台、11…操作手段、12…訓練者、2…車両運動計算処理装置、21…車両速度演算装置、22…第1の現在位置演算装置、3…通信装置、31…送信装置、32…受信装置、4…CG表示制御装置、41…速度指令演算装置、42…第2の現在位置演算装置、43…CG表示演算装置、44…位置比較演算装置、45…一つ前位置データ記憶装置、46…データ比較装置、47…速度判定部、48…AND論理回路、49…通信エラー判定装置、410…仮想位置演算装置、411…一つ前速度データ記憶装置、5…表示装置、6…車両2D運動計算処理装置、7…CG2D表示制御装置、8…3D運動計算処理装置、9…CG3D表示制御装置。
【技術分野】
【0001】
本発明は車両走行シミュレータにおいて、仮想車両の運転台からの景観を表示するCG表示制御システムおよび方法に関するものである。
【背景技術】
【0002】
従来の車両運転シミュレータでは、運転台で操作される入力操作に応じて仮想空間での視点位置を移動させることで臨場感を再現している。
【0003】
このようなシステムの例は、特許文献1に見られる。
【0004】
【特許文献1】特開平9−311619号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来の車両運転シミュレータを用いて、より運転感覚が現実の車両と近いような車両運転シミュレータを実現する場合には、車両運動特性を考慮した加速度、速度、位置を計算する車両運動計算装置を追加している。そして、加速度、速度および位置をリアルタイムで計算し、車両の運転台から見える画像を再現する表示装置に遅れなく、正確に運転操作基く速度情報等を伝達する必要がある。
【0006】
従来の車両運転シミュレータでは、CG表示制御装置側での演算精度の不足や、運転台システム側からCG表示制御装置側への通信遅れやエラーがあると、運転操作に基く本来の車両位置と、景観表示のための車両位置にずれが生じるという問題がある。
【0007】
本発明の目的は、運転操作に基く車両の現在位置と、CG表示装置で表示する景観の視点となる車両の現在位置の一致精度を向上させ、訓練者に違和感を感じさせないCG表示が可能な車両運転シミュレータを提供することである。
【課題を解決するための手段】
【0008】
本発明はその一面において、運転台に設置され移動体の加減速に関連する指令を入力する操作手段と、この操作手段から入力された指令に基づいて移動体の速度情報および現在位置情報(以下、第1の現在位置情報と言う)を演算する車両運動計算処理装置と、この車両運動計算処理装置と通信手段で結合されたCG表示制御装置と、前記車両運動計算処理装置で演算した移動体の前記速度情報を前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記速度情報に応じて移動する移動体の現在位置情報(以下、第2の現在位置情報と言う)からの視点で、CGで作成された仮想空間の景観映像を表示するCG表示装置とを備えた運転シミュレータのCG表示制御システムにおいて、前記車両運動計算処理装置で生成された前記速度情報だけでなく移動体の前記第1の現在位置情報をも、前記通信手段を通して前記CG表示制御装置へ送信し、CG表示の制御をバックアップするようにしたことを特徴とする。
【0009】
本発明の望ましい実施態様においては、前記バックアップとしては、移動体の前記第1第2の現在位置情報を比較し、この比較結果に基いて、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックすることを特徴とする。
【0010】
本発明の他の望ましい実施態様においては、前記バックアップとして、移動体の前記速度情報が所定の速度以上であり、かつ前記CG表示制御装置で受信した前記第1の現在位置情報に所定の変化が存在しないとき、前記通信手段の異常を検出することを特徴とする。
【0011】
また、本発明の他の望ましい実施態様においては、前記CG表示制御装置で一つ前の送信周期で受信した速度情報を記憶し、通信異常を検出したとき、記憶した前記一つ前の通信周期に受信した速度情報に基いてCG表示用の仮想現在位置を演算し、この仮想現在位置に基いてCG景観映像を表示させる映像つなぎを行うことを特徴とする。
【発明の効果】
【0012】
本発明の望ましい実施態様によれば、運転台からの操作と車両の走行環境に応じた物理運動の結果生じるある時刻の速度、位置と実時間で一致度の高い地点での映像を表示し、仮想画面に、現実に運転している感覚により近い景観を表現することができる。
【0013】
また、本発明の望ましい実施態様によれば、通信異常が生じた場合にも、運転台での操作との一致度が高く、違和感のないCG景観表示を継続できる運転シミュレータを実現できる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施例による運転シミュレータのCG表示制御システムを、添付図面を参照して説明する。
【0015】
図1は、本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。運転シミュレータは、訓練者が運転操作を行う運転台1、その操作内容を情報変換する車両運動計算処理装置2、通信装置3、車両運動に応じた景観映像を表示させるCG表示制御装置4、および訓練者に仮想景観を示す表示装置5で構成されている。
【0016】
運転台1には、鉄道列車におけるノッチ操作や、自動車におけるアクセルやブレーキ操作などを行う操作手段11があり、訓練者(運転者)12がこの操作手段を取り扱う。
【0017】
車両運動計算処理装置2は、運転台1の操作手段11の操作に基く加減速度トルク指令Tαに応じて、車両の速度を演算する車両速度演算装置21と、車両の現在位置を演算する第1の現在位置演算装置22を備えている。この演算のために、運転台システムとしては、車両速度演算装置21での演算のための外部環境データを提供する外部環境データベース23や、車両自動制御装置(ATC)24などを備えている。
【0018】
通常、演算された車両の速度情報と第1の現在位置情報は、運転席のメータ表示などに利用される。
【0019】
本発明においては、従来からの車両の速度情報だけではなく、現在位置情報をも通信装置3を通してCG表示制御装置4へ送信する。
【0020】
通信装置3は、送信装置31と、受信装置32から構成される。
【0021】
CG表示制御装置4は、主として、景観映像を移動させるための速度指令を演算する速度指令演算装置41、その速度指令に基き車両の現在位置を演算する第2の現在位置演算装置42、およびCG表示演算装置43を備えている。その他の装置については後述する。
【0022】
表示装置5は、前記速度指令に応じて移動する前記第2の現在位置の運転席から見た景観映像を訓練者に対して表示する。
【0023】
次に、図1の各装置の動作について説明する。まず、訓練者12は、運転台1に座って、車両の加減速トルク指令Tαを入力する操作手段11を操作する。操作手段11は、レバーまたはペダルによる人間の操作から、その入力レベルを電気信号に変換して車両運動計算処理装置2に信号を伝達する。車両が軌道上を走行する場合には、この加減速トルク指令Tαが主要入力信号となる。軌道の分岐やスイッチバックなどの入力は、それに相当する入力と対応した装置が従来技術により制御を分担するものとし、ここでは、加減速トルク指令Tαの入力についてのみ説明する。
【0024】
運転台のレバーの設定角やアクセルの踏み込み量により入力された加減速トルク指令Tα信号に対して、車両の運動は軌道の傾斜、車両のエンジンやモータなどの性能、車両や搭載物の質量、風や空気、路面の抵抗などにより加速度が決まる。これらのパラメータを運動方程式に代入して車両の加速度が計算される。この加速度により、車両速度演算装置21によって、各時刻における車両の速度が計算できる。また、第1の現在位置演算装置22では、各時刻の速度を積分することで、ある時刻における車両の位置が計算される。
【0025】
データベース23には、軌道の各地点における勾配、カーブ曲率、路面の摩擦係数、時刻と軌道位置に応じた風速、天候、搭載物の質量変化などのデータが収納されている。このデータベースから、軌道位置、時刻を参照値としてデータを引き出し、その時刻の車両に加わる抵抗力、加速力を計算し、その時刻、軌道位置における車両の加速度、速度、位置が演算される。
【0026】
車両運動計算処理装置2から、送信装置31には、前述したように、各時刻における車両の速度情報だけでなく、車両の第1の現在位置のデータが送信される。この実施例では、軌道上を走行する車両であるため、速度、位置ともにスカラ量であり2つの数値で送信される。
【0027】
送信装置31に送られたデータは受信装置32に伝送される。
【0028】
図2は、図1におけるCG表示制御装置4側の受信装置32に送られたデータの詳細な処理を示す制御ブロック図である。
【0029】
まず、受信した車両の速度情報に基いて、景観映像を移動するための速度指令を、速度指令演算装置41にて演算し、第2の位置演算装置42にて現在の車両位置を演算し、CG表示演算装置43により表示装置5を制御する点は、従来と同様である。
【0030】
本実施例においては、運転台システム側の車両運動計算処理装置2から、車両の大の現在位置情報も送信されており、受信した車両の第1の現在位置データと、CG表示制御装置4内の第2の位置演算装置42で計算され、現在表示している第2の現在位置データの比較を行う。位置比較演算装置44によって得られたこれら第1第2の現在位置データの誤差に応じて、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックする補正手段を備えている。図2では、景観移動用の速度指令値を補正するように、速度指令演算装置41へフィードバックを行っている。このようにして、運転台システム側の演算能力に余裕のあるコンピュータで演算した精度の高い第1の現在位置情報に一致したCG表示制御装置4内の仮想位置の景観を表示装置5に表示することができる。
【0031】
運転台システム側で高精度に演算された第1の現在位置情報と、CG表示制御装置4内の第2の現在位置情報が高精度に一致することで、坂道での加速感覚、信号に対する停止感覚、路面の凸凹と車体の振動の感覚まで一致し、より臨場感のある訓練を実現できる。
【0032】
図3は、通信異常が生じた場合に適した本発明の第2の実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【0033】
重複説明を避けるため、図2と相違する点のみについて述べる。
【0034】
一つ前の送信周期で受信した一つ前位置データ記憶装置45の出力と、今回受信した位置データとが、データ比較装置46で常時比較されている。速度判定部47では、現在の速度データを監視しており、有速度状態であれば、アンド論理回路48に一入力を与える。有速度状態であれば、当然に前回の車両位置と今回の車両位置は異なるはずであり、これらの間に差が無かったならば、アンド論理回路48の出力が生じ、通信エラー判定装置49にて通信異常が検出される。通信エラー判定装置49の出力である「つなぎ指令」は、仮想位置演算装置410に出力を促す。仮想位置演算装置410は、一つ前の送信周期に受信した速度情報を記憶している一つ前速度データ記憶装置411の速度情報を入力しており、この速度情報によって仮想の現在位置を演算し、CG表示演算装置43に出力する。極めて短時間の一送信周期の間では、車両速度に大きな差は無く、景観映像にも大きな差は生じない。したがって、ごく短時間の通信異常に関しては、訓練者に違和感を感じさせること無く、次の、送信周期で分らぬ間に正常に復帰していることとなる。
【0035】
なお、多数の送信周期に亘る長い通信障害が発生した場合には、通信エラーの判定の連続によってこれを検知し、訓練者にアナウンスしてCG表示を打切ることが望ましい。
【0036】
このように、本実施例によれば、通信切断の直前の速度を基に、仮想的な位置指令値を計算する仕組みを用意しているため、短期間の通信障害が発生しても、CG表示制御装置4内の景観の移動が継続される。このため、通信が復旧したときの位置誤差に基くフィードバックが働き、運転台の距離計とCG景観映像の位置が一致するように補正され、通信障害があっても臨場感を失わないで訓練できる効果がある。
【0037】
図4は、自動車のように、車両が2次元(2D)平面上を移動する場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【0038】
平面上を走行する車両(車や船舶など)の場合の車両2D運動計算処理装置6の場合は、平面上を走行するため、制御入力は加減速トルクTαと操舵指令角φの2つとなる。時々刻々の操舵角と速度ベクトルにより微少時間後の車両の位置と向きが決定される。
【0039】
運転台のレバーの設定角やアクセルにより入力された信号と、操舵機によって入力された操舵角信号に対して、車両の運動は、車両のエンジンやモータなどの性能、車両や搭載物の質量、風や空気、路面、海面の抵抗などにより加速度及び進行方向が決まる。車両の2D速度ベクトル演算装置61では、これらのパラメータを運動方程式に代入して車両の加速度ベクトルを計算し、この加速度ベクトルにより、各時刻における車両の速度ベクトルを計算できる。また、第1の2D現在位置演算装置62では、各時刻の速度ベクトルを積分することで、ある時刻における車両の第1の2D現在位置と向きが計算される。
【0040】
データベース63には、平面上の各地点における勾配、路面の摩擦係数、時刻と軌道位置に応じた風速、天候、搭載物の質量変化などのデータが収納されている。このデータベース63から、平面上の位置、時刻を参照値としてデータを引き出し、その時刻の車両に加わる抵抗力、加速力を計算し、その時刻、平面上の位置における車両の加速度ベクトル、速度ベクトル、平面上の位置を決定する。
【0041】
同様に、CG2D表示制御装置7でも、2次元ベクトルにて演算・制御が実行される。
【0042】
図5は、飛行機のように、運転者の操作に応じて3次元(3D)空間内を移動する移動体の場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。3次元空間内を移動する移動体の場合には、前述の平面上を移動する車両の場合に加えて、平面と直角を成す上下方向への加速度ベクトルを付加した3D指令に応じ、3次元(3D)運動方程式に基づく空間内の速度ベクトルが決定される。
【0043】
図4の場合には、平面上を移動するため、速度、位置はともにx、y成分を持ち4つの数値で送信されるが、図5の場合は空間内を移動するため、位置、速度はそれぞれ3つの(3D)成分を持ち6個の数値で伝送される。これに応じて、3D運動計算処理装置8内の車両の3D速度ベクトル演算装置81では、これらのパラメータを運動方程式に代入して移動体の3D加速度ベクトルを計算し、この3D加速度ベクトルにより、各時刻における移動体の速度ベクトルを計算する。また、第1の3D現在位置演算装置82でも、各時刻の3D速度ベクトルを積分することで、ある時刻における移動体の第1の3D現在位置と向きが計算される。
【0044】
以上説明したように、本実施例の運転シミュレータのCG表示制御システムによれば、運転台からの操作と移動体の走行/飛行環境に応じた物理運動の結果生じるある時刻の速度、位置と実時間で一致した地点の映像を常に表示するようにCGを制御できる。したがって、現実に運転している感覚をそのまま仮想画面に表現することができる。
【図面の簡単な説明】
【0045】
【図1】本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【図2】図1におけるCG表示制御装置4側の受信装置32に送られたデータの詳細な処理を示す制御ブロック図である。
【図3】通信異常が生じた場合に適した本発明の第2の実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【図4】車両が2次元(2D)平面上を移動する場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【図5】運転者の操作に応じて3次元(3D)空間内を移動する移動体の場合の本発明の一実施例による運転シミュレータのCG表示制御システムの概要構成図である。
【符号の説明】
【0046】
1…運転台、11…操作手段、12…訓練者、2…車両運動計算処理装置、21…車両速度演算装置、22…第1の現在位置演算装置、3…通信装置、31…送信装置、32…受信装置、4…CG表示制御装置、41…速度指令演算装置、42…第2の現在位置演算装置、43…CG表示演算装置、44…位置比較演算装置、45…一つ前位置データ記憶装置、46…データ比較装置、47…速度判定部、48…AND論理回路、49…通信エラー判定装置、410…仮想位置演算装置、411…一つ前速度データ記憶装置、5…表示装置、6…車両2D運動計算処理装置、7…CG2D表示制御装置、8…3D運動計算処理装置、9…CG3D表示制御装置。
【特許請求の範囲】
【請求項1】
運転台に設置され移動体の加減速に関連する指令を入力する操作手段と、この操作手段から入力された指令に基づいて移動体の速度情報および第1の現在位置情報を演算する車両運動計算処理装置と、この車両運動計算処理装置と通信手段で結合されたCG表示制御装置と、前記車両運動計算処理装置で生成された移動体の前記速度情報を前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記速度情報に応じて移動する移動体の第2の現在位置情報からの視点で、CGで作成された仮想空間の景観映像を表示するCG表示装置とを備えた運転シミュレータのCG表示制御システムにおいて、
前記車両運動計算処理装置で生成された移動体の前記第1の現在位置情報を、前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記第1の現在位置情報を用いて、CG表示の制御をバックアップするバックアップ手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項2】
請求項1において、前記バックアップ手段は、移動体の前記第1第2の現在位置情報を比較する手段と、この比較結果を、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックする補正手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項3】
請求項1または2において、前記バックアップ手段は、移動体の前記速度情報が所定の速度以上であり、かつ前記CG表示制御装置で受信した前記第1の現在位置情報に所定の変化が存在しないとき、前記通信手段の異常を検出する通信異常検出手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項4】
請求項1または2において、前記CG表示制御装置で一つ前の送信周期に受信した速度情報を記憶する手段と、通信異常を検出したとき、記憶した前記一つ前の通信周期に受信した速度情報に基いて、CG表示用の仮想現在位置を演算する仮想位置演算装置と、この仮想現在位置を用いてCG景観映像を移動させる映像つなぎ手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項5】
請求項1〜4のいずれかにおいて、前記操作手段による入力指令、前記速度情報および前記現在位置情報は、2次元または3次元の情報であることを特徴とする運転シミュレータのCG表示制御システム。
【請求項6】
運転台に設置され移動体の加減速に関連する指令を入力する操作手段と、前記操作手段から入力された指令に基づいて移動体の速度情報および第1の現在位置情報を演算する車両運動計算処理装置と、この車両運動計算処理装置と通信手段で結合されたCG表示制御装置と、前記車両運動計算処理装置で生成された移動体の前記速度情報を前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記速度情報に応じて移動する移動体の第2の現在位置情報からの視点で、CGで作成された仮想空間の景観映像を表示するCG表示装置とを備えた運転シミュレータのCG表示制御方法において、
前記車両運動計算処理装置で生成された移動体の前記第1の現在位置情報を、前記通信手段を通して前記CG表示制御装置へ送信するステップと、前記CG表示制御装置で受信した前記第1の現在位置情報を用いて、CG表示の制御をバックアップするバックアップステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項7】
請求項6において、前記バックアップステップは、移動体の前記第1第2の現在位置情報を比較するステップと、この比較結果を、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックするフィードバックステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項8】
請求項6または7において、前記バックアップステップは、移動体の前記速度情報が所定の速度以上であり、かつ前記CG表示制御装置で受信した前記第1の現在位置情報に所定の変化が存在しないとき、前記通信手段の異常を検出する通信異常検出ステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項9】
請求項6または7において、前記CG表示制御装置で一つ前の送信周期に受信した速度情報を記憶するステップと、通信異常を検出したとき、記憶した前記一つ前の通信周期に受信した速度情報に基いて、CG表示用の仮想現在位置を演算する仮想位置演算ステップと、この仮想現在位置を用いてCG景観映像を移動させる映像つなぎステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項1】
運転台に設置され移動体の加減速に関連する指令を入力する操作手段と、この操作手段から入力された指令に基づいて移動体の速度情報および第1の現在位置情報を演算する車両運動計算処理装置と、この車両運動計算処理装置と通信手段で結合されたCG表示制御装置と、前記車両運動計算処理装置で生成された移動体の前記速度情報を前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記速度情報に応じて移動する移動体の第2の現在位置情報からの視点で、CGで作成された仮想空間の景観映像を表示するCG表示装置とを備えた運転シミュレータのCG表示制御システムにおいて、
前記車両運動計算処理装置で生成された移動体の前記第1の現在位置情報を、前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記第1の現在位置情報を用いて、CG表示の制御をバックアップするバックアップ手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項2】
請求項1において、前記バックアップ手段は、移動体の前記第1第2の現在位置情報を比較する手段と、この比較結果を、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックする補正手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項3】
請求項1または2において、前記バックアップ手段は、移動体の前記速度情報が所定の速度以上であり、かつ前記CG表示制御装置で受信した前記第1の現在位置情報に所定の変化が存在しないとき、前記通信手段の異常を検出する通信異常検出手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項4】
請求項1または2において、前記CG表示制御装置で一つ前の送信周期に受信した速度情報を記憶する手段と、通信異常を検出したとき、記憶した前記一つ前の通信周期に受信した速度情報に基いて、CG表示用の仮想現在位置を演算する仮想位置演算装置と、この仮想現在位置を用いてCG景観映像を移動させる映像つなぎ手段を備えたことを特徴とする運転シミュレータのCG表示制御システム。
【請求項5】
請求項1〜4のいずれかにおいて、前記操作手段による入力指令、前記速度情報および前記現在位置情報は、2次元または3次元の情報であることを特徴とする運転シミュレータのCG表示制御システム。
【請求項6】
運転台に設置され移動体の加減速に関連する指令を入力する操作手段と、前記操作手段から入力された指令に基づいて移動体の速度情報および第1の現在位置情報を演算する車両運動計算処理装置と、この車両運動計算処理装置と通信手段で結合されたCG表示制御装置と、前記車両運動計算処理装置で生成された移動体の前記速度情報を前記通信手段を通して前記CG表示制御装置へ送信する手段と、前記CG表示制御装置で受信した前記速度情報に応じて移動する移動体の第2の現在位置情報からの視点で、CGで作成された仮想空間の景観映像を表示するCG表示装置とを備えた運転シミュレータのCG表示制御方法において、
前記車両運動計算処理装置で生成された移動体の前記第1の現在位置情報を、前記通信手段を通して前記CG表示制御装置へ送信するステップと、前記CG表示制御装置で受信した前記第1の現在位置情報を用いて、CG表示の制御をバックアップするバックアップステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項7】
請求項6において、前記バックアップステップは、移動体の前記第1第2の現在位置情報を比較するステップと、この比較結果を、景観映像を移動させる前記第2の現在位置情報を演算する制御系にフィードバックするフィードバックステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項8】
請求項6または7において、前記バックアップステップは、移動体の前記速度情報が所定の速度以上であり、かつ前記CG表示制御装置で受信した前記第1の現在位置情報に所定の変化が存在しないとき、前記通信手段の異常を検出する通信異常検出ステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【請求項9】
請求項6または7において、前記CG表示制御装置で一つ前の送信周期に受信した速度情報を記憶するステップと、通信異常を検出したとき、記憶した前記一つ前の通信周期に受信した速度情報に基いて、CG表示用の仮想現在位置を演算する仮想位置演算ステップと、この仮想現在位置を用いてCG景観映像を移動させる映像つなぎステップを備えたことを特徴とする運転シミュレータのCG表示制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−134302(P2010−134302A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−311680(P2008−311680)
【出願日】平成20年12月8日(2008.12.8)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月8日(2008.12.8)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
[ Back to top ]