
針振り機構を備えたミシン

【課題】 ニーリフターで布押さえの上げ下ろしと針振りの両方を行えるミシンを提供する。
【解決手段】 ミシン上軸位相検出装置3からの信号によりミシン停止中であれば、ニーリフター2の操作により布押さえ上下機構8のみの制御を行い、ミシン稼働中であれば、ニーリフター2の操作により針振り機構7の制御を行い、ニーリフター2の操作量に応じて針62を振らせて縫いを行う。同時にミシンモータ6の速度制御を行う。
【解決手段】 ミシン上軸位相検出装置3からの信号によりミシン停止中であれば、ニーリフター2の操作により布押さえ上下機構8のみの制御を行い、ミシン稼働中であれば、ニーリフター2の操作により針振り機構7の制御を行い、ニーリフター2の操作量に応じて針62を振らせて縫いを行う。同時にミシンモータ6の速度制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、針振り機構を備えたミシンに関する。
【背景技術】
【0002】
ミシンには、ミシン縫いの速度操作装置や、布を押さえるための布押さえ上下機構の操作装置や或いは針振り機構を備える場合には、この針振り機構の操作装置など多数の操作装置が備えられており、そのための数多くの操作ボタンなどが備えられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭58−31157号公報
【特許文献2】特開2002−159769号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、作業者において多数の操作ボタンを操作するのは煩雑であり、特に布を押さえる布押さえの上げ下げやジグザグ縫いのための針振り機構の制御は、縫い作業中に頻繁に操作の必要があり、その都度異なる操作ボタンなどを操作しなければならず、作業者の大きな負担になっていた。
本発明は、布押さえの上下操作と針振り機構の操作は同時に行われることがなく、ミシンの稼働、非稼働状態に応じてどちらか一方が行われることに着目してなされたもので、操作ボタンなどの操作装置を削減し、作業者の負担を軽減することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、針振り機構と布押さえ上下機構を備えたミシンにおいて、作業者が操作する操作装置と、該操作手段の操作とその操作量を検出する操作検出装置と、ミシンの針が稼働状態か停止状態かを検出する状態検出装置と、前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が稼働状態の時には、前記針振り機構を制御して、前記操作量に応じて針振り動作を行わせる針振り制御装置と、前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が停止状態の時には、前記布押さえ上下機構を制御して前記操作に応じて布押さえを上下させる布押さえ制御装置と、を備えたことを特徴とする。
前記操作装置は、作業者が膝を用いて操作するニーリフターである、ことが望ましく、また前記針振り機構による針振り動作の振幅量に対応して、ミシンの運転速度を制御するミシン運転速度制御装置を、更に備えることが望ましい。
【発明の効果】
【0006】
本発明のミシンによれば、針振り機構と布押さえ上下機構の操作を同一の操作装置で兼用できるため、操作装置の削減と作業者の負担軽減の効果がある。
また前記操作装置としてニーリフターを用い、また前記針振り機構による針振り動作の振幅量に対応して、ミシンの運転速度を制御するミシン運転速度制御装置を備えた場合、フリーモーション縫いを行う際に作業性が格段に向上する効果がある。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態を示すブロック図。
【図2】本発明の一実施形態の動作を示すフローチャート図。
【図3】本発明の一実施形態におけるニーリフターを示す説明図。
【図4】本発明の一実施形態におけるニーリフターの機構を示す斜視図。
【図5】本発明の一実施形態におけるニーリフター機構の部分図。
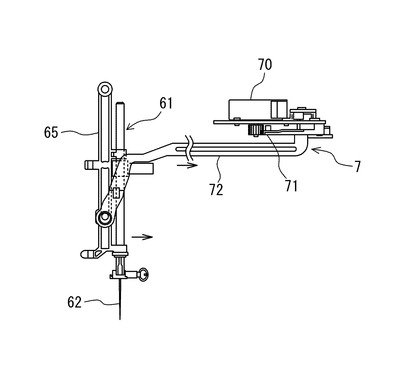
【図6】本発明の一実施形態における針振り機構を示す説明図。
【図7】本発明の一実施形態における布押さえ上下機構を示す説明図。
【発明を実施するための形態】
【0008】
以下本発明の実施の形態を図面に基づいて説明する。
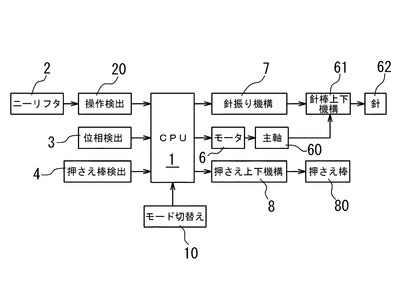
図1において、制御装置1はミシン全体の制御を行っており、操作装置であるニーリフター2の操作及びその操作量が操作検出装置20により検出され、制御装置1に入力するように構成されている。
制御装置1には、更にミシンが稼働しているか或いは停止しているかの状態を検出する状態検出装置であるミシン上軸位相検出装置3からの信号が入力され、ミシン停止状態か稼働状態かを認識できるように構成されている。また、ミシンの縫い速度も検出できるようになっている。
制御装置1にはまた、布押さえ検出装置4からの信号が入力し、布押さえ上下機構8の状態、即ち布押さえ上下機構8が上がっているか下がっているかの状態を検出するように構成されている。
【0009】
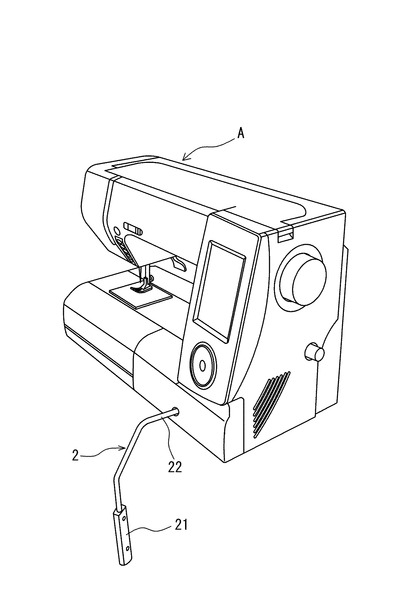
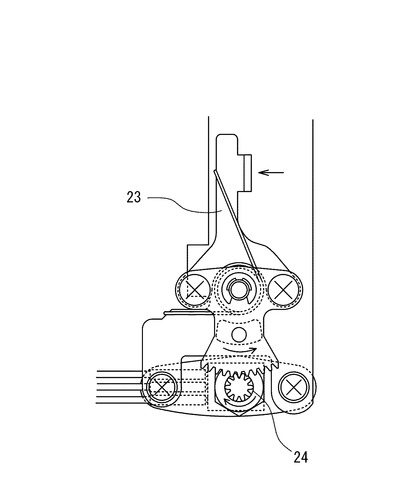
図3において、ニーリフター2は膝当て部21とレバー22からなるL字形状をなしており、レバー22がミシン本体A前面のベースから手前側に突出するように設けられ、膝当て部21がレバー22から下方に90度屈曲した形状になっている。この膝当て部21を作業者が膝を使って操作することによりレバー22が回動し、図4と図5に示すようにミシン本体A内部に設けられている操作検出装置20を作動するようになっている。レバー22の回動はリンク機構23を駆動し、該リンク機構23に係合するポテンショメータ24を駆動して、ニーリフター2の操作及び操作量を検出するようになっている。該レバー22、リンク機構23及びポテンショメータ24により操作検出装置20を構成している。
【0010】
制御装置1はミシンモータ6に信号を送り、ミシンモータ6のオンオフ及びミシンモータ6の回転速度を制御して、ミシンの縫い速度を制御するようになっている。ミシンモータ6は主軸60を介して針棒上下機構61を駆動し、針62を上下させて縫いを実行する。
【0011】
制御装置1は、操作検出装置20からニーリフター2の操作の信号を受けると、布押さえ上下機構8に信号を送り、布押さえ棒80を上下させて、布押さえ81の上げ下ろしを行うように構成されている。
また制御装置1は針振り機構7を制御し、針棒上下機構61を幅方向に振って、ジグザグ縫いを実行させるようになっている。この振り幅は、操作検出装置20からのニーリフター2の操作量に応じて変わるように構成されている。
【0012】
図6において、針棒上下機構61は針棒支持体65に支持され、上下動して針62に縫いを実行させると共に、針振り機構7により幅方向に振れてジグザグ縫いを行うようになっている。針振り機構7は振幅モータ70を備え、振幅歯車71を介して振幅ロッド72により針棒上下機構61を幅方向に振れさせるように構成されている。
【0013】
図7に布押さえ上下機構8の詳細を示す。上下動可能な布押さえ棒80の下端に布押さえ81が装着され、布押さえ81が降りて布を押さえるようになっている。布押さえ上下機構8はステッピングモータ82を有し、このステッピングモータ82の駆動により上下するレバー83を備えている。該レバー83は布押さえ棒80に係合し、布押さえ棒80を上下動させるように構成されている。
【0014】
制御装置1はミシン全体の制御を行うと共に、針振り制御装置及び布押さえ制御装置としての機能を果たすようになっている。
制御装置1には、モード切替装置10が接続しており、制御装置1のモードを切り替えることができるように構成されている。
1つのモードは通常モードであり、ニーリフター2の操作に基づいて布押さえ上下機構8の制御のみを行い、ニーリフター2の操作により布押さえ棒80を上下させ、布押さえ81の上げ下ろしだけを行うモードである。即ち制御装置1は布押さえ制御装置としてのみ機能し、このモードでは、操作者はニーリフター2を操作して布押さえ81の上げ下ろしのみを行う。
他のモードはフリーモーション縫いモードであり、ニーリフター2の操作により針振り機構7と布押さえ上下機構8を選択的に制御するモードである。即ち制御装置1は針振り制御装置としての機能と布押さえ制御装置としての機能を選択的に果たすモードである。この選択はミシン上軸位相検出装置3からの信号により制御装置1が判断して行うようになっている。
【0015】
即ち、ミシン上軸位相検出装置3からの信号によりミシンが停止していると認定したときは、制御装置1は布押さえ制御装置として機能し、作業者がニーリフター2を操作すると、操作検出装置20により該操作を検出し、同時に布押さえ検出装置4から布押さえ棒80の状態を検出して、布押さえ上下機構8を制御し、布押さえ81の上げ又は下しを行うように構成されている。
【0016】
一方、ミシン上軸位相検出装置3からの信号によりミシンが稼働中と認定したときは、制御装置1は針振り制御装置として機能し、作業者がニーリフター2を操作すると、操作検出装置20により該操作と操作量を検出し、針振り機構7を駆動し、該操作量に応じた振幅で針62を振らすように構成されている。
以上のように、ミシン上軸位相検出装置3からの信号によりミシンが稼働中か停止中かを判断し、それに応じてニーリフター2の操作により制御内容を変えるように構成されている。即ち、ミシンが稼働中の時は、布押さえ81を上げ下ろしすることはないから、稼働中であれば針振り機構7を制御する。またミシンが停止中の時は、針62を幅方向に振ることはないので、布押さえ上下機構8を制御するようになっている。
【0017】
なおこの実施形態では、フリーモーション縫いの際に、制御装置1は同時にミシンモータ6を制御してミシンの縫い速度の制御を同時に行うようになっている。即ち、針振り機構7を制御して針62を幅方向に振らせている時には、ミシンの速度を落とすように制御し、針62を幅方向に振らせない時にはミシンの速度を上げるように制御する構成になっている。これにより、作業性の向上と縫い品質の向上を図ることができる。
【0018】
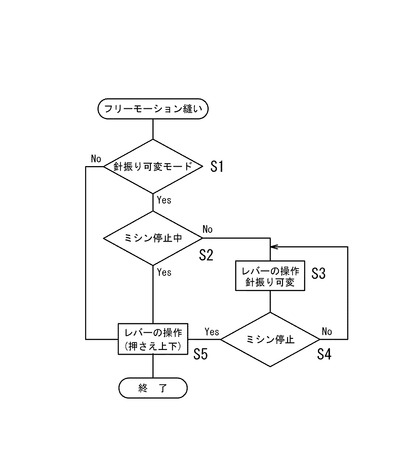
図2により動作を説明する。
モード切替装置10により現在のモードを確認し(ステップS1)、フリーモーション縫いモードであり、針振り機構7を制御するモードであれば、ミシン上軸位相検出装置3からの信号によりミシン停止中であるか否か確認する(ステップS2)。ステップS1で通常モードであれば、ニーリフター2の操作により布押さえ上下機構8のみの制御を行う(ステップS5)。
ステップS2で、ミシン停止中でなく稼働中であれば、ニーリフター2の操作により針振り機構7の制御を行い(ステップS3)、ニーリフター2の操作量に応じて針62を振らせて縫いを行う。同時にミシンモータ6の速度制御を行うことも可能である。ミシン上軸位相検出装置3からの信号によりミシンが停止したことを検知すると(ステップS4)、ステップS5に移行する。
またステップS2でミシンが停止中の時もステップS5に移行する。ステップ5ではニーリフター2の操作により布押さえ上下機構8のみの制御を行う。
【0019】
以上の実施形態では、作業者の膝により操作するニーリフター2を用いて、ミシンの稼働状態に応じて布押さえ81の上げ下げと、針62の振りとを両方行えるため、作業者の負担が大幅に軽減する。特に、作業者が布を自由に移動させて縫いを実行するフリーモーション縫いにおいては、膝の操作により2つの機能を果たせるため、その効果が大きい。更に針62の振幅に応じてミシンモータ6の速度制御を行う場合には、目飛び、糸切れなどの発生を防止できる効果がある。
【符号の説明】
【0020】
1:制御装置、2:ニーリフター、3:ミシン上軸位相検出装置、4:布押さえ検出装置、6:ミシンモータ、7:針振り機構、8:布押さえ上下機構、10:モード切替装置、20:操作検出装置、21:膝当て部、22:レバー、23:リンク機構、24:ポテンショメータ、60:主軸、61:針棒上下機構、62:針、65:針棒支持体、70:振幅モータ、71:振幅歯車、72:振幅ロッド、80:布押さえ棒、81:布押さえ、82:ステッピングモータ、83:レバー。
【技術分野】
【0001】
この発明は、針振り機構を備えたミシンに関する。
【背景技術】
【0002】
ミシンには、ミシン縫いの速度操作装置や、布を押さえるための布押さえ上下機構の操作装置や或いは針振り機構を備える場合には、この針振り機構の操作装置など多数の操作装置が備えられており、そのための数多くの操作ボタンなどが備えられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭58−31157号公報
【特許文献2】特開2002−159769号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、作業者において多数の操作ボタンを操作するのは煩雑であり、特に布を押さえる布押さえの上げ下げやジグザグ縫いのための針振り機構の制御は、縫い作業中に頻繁に操作の必要があり、その都度異なる操作ボタンなどを操作しなければならず、作業者の大きな負担になっていた。
本発明は、布押さえの上下操作と針振り機構の操作は同時に行われることがなく、ミシンの稼働、非稼働状態に応じてどちらか一方が行われることに着目してなされたもので、操作ボタンなどの操作装置を削減し、作業者の負担を軽減することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、針振り機構と布押さえ上下機構を備えたミシンにおいて、作業者が操作する操作装置と、該操作手段の操作とその操作量を検出する操作検出装置と、ミシンの針が稼働状態か停止状態かを検出する状態検出装置と、前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が稼働状態の時には、前記針振り機構を制御して、前記操作量に応じて針振り動作を行わせる針振り制御装置と、前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が停止状態の時には、前記布押さえ上下機構を制御して前記操作に応じて布押さえを上下させる布押さえ制御装置と、を備えたことを特徴とする。
前記操作装置は、作業者が膝を用いて操作するニーリフターである、ことが望ましく、また前記針振り機構による針振り動作の振幅量に対応して、ミシンの運転速度を制御するミシン運転速度制御装置を、更に備えることが望ましい。
【発明の効果】
【0006】
本発明のミシンによれば、針振り機構と布押さえ上下機構の操作を同一の操作装置で兼用できるため、操作装置の削減と作業者の負担軽減の効果がある。
また前記操作装置としてニーリフターを用い、また前記針振り機構による針振り動作の振幅量に対応して、ミシンの運転速度を制御するミシン運転速度制御装置を備えた場合、フリーモーション縫いを行う際に作業性が格段に向上する効果がある。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態を示すブロック図。
【図2】本発明の一実施形態の動作を示すフローチャート図。
【図3】本発明の一実施形態におけるニーリフターを示す説明図。
【図4】本発明の一実施形態におけるニーリフターの機構を示す斜視図。
【図5】本発明の一実施形態におけるニーリフター機構の部分図。
【図6】本発明の一実施形態における針振り機構を示す説明図。
【図7】本発明の一実施形態における布押さえ上下機構を示す説明図。
【発明を実施するための形態】
【0008】
以下本発明の実施の形態を図面に基づいて説明する。
図1において、制御装置1はミシン全体の制御を行っており、操作装置であるニーリフター2の操作及びその操作量が操作検出装置20により検出され、制御装置1に入力するように構成されている。
制御装置1には、更にミシンが稼働しているか或いは停止しているかの状態を検出する状態検出装置であるミシン上軸位相検出装置3からの信号が入力され、ミシン停止状態か稼働状態かを認識できるように構成されている。また、ミシンの縫い速度も検出できるようになっている。
制御装置1にはまた、布押さえ検出装置4からの信号が入力し、布押さえ上下機構8の状態、即ち布押さえ上下機構8が上がっているか下がっているかの状態を検出するように構成されている。
【0009】
図3において、ニーリフター2は膝当て部21とレバー22からなるL字形状をなしており、レバー22がミシン本体A前面のベースから手前側に突出するように設けられ、膝当て部21がレバー22から下方に90度屈曲した形状になっている。この膝当て部21を作業者が膝を使って操作することによりレバー22が回動し、図4と図5に示すようにミシン本体A内部に設けられている操作検出装置20を作動するようになっている。レバー22の回動はリンク機構23を駆動し、該リンク機構23に係合するポテンショメータ24を駆動して、ニーリフター2の操作及び操作量を検出するようになっている。該レバー22、リンク機構23及びポテンショメータ24により操作検出装置20を構成している。
【0010】
制御装置1はミシンモータ6に信号を送り、ミシンモータ6のオンオフ及びミシンモータ6の回転速度を制御して、ミシンの縫い速度を制御するようになっている。ミシンモータ6は主軸60を介して針棒上下機構61を駆動し、針62を上下させて縫いを実行する。
【0011】
制御装置1は、操作検出装置20からニーリフター2の操作の信号を受けると、布押さえ上下機構8に信号を送り、布押さえ棒80を上下させて、布押さえ81の上げ下ろしを行うように構成されている。
また制御装置1は針振り機構7を制御し、針棒上下機構61を幅方向に振って、ジグザグ縫いを実行させるようになっている。この振り幅は、操作検出装置20からのニーリフター2の操作量に応じて変わるように構成されている。
【0012】
図6において、針棒上下機構61は針棒支持体65に支持され、上下動して針62に縫いを実行させると共に、針振り機構7により幅方向に振れてジグザグ縫いを行うようになっている。針振り機構7は振幅モータ70を備え、振幅歯車71を介して振幅ロッド72により針棒上下機構61を幅方向に振れさせるように構成されている。
【0013】
図7に布押さえ上下機構8の詳細を示す。上下動可能な布押さえ棒80の下端に布押さえ81が装着され、布押さえ81が降りて布を押さえるようになっている。布押さえ上下機構8はステッピングモータ82を有し、このステッピングモータ82の駆動により上下するレバー83を備えている。該レバー83は布押さえ棒80に係合し、布押さえ棒80を上下動させるように構成されている。
【0014】
制御装置1はミシン全体の制御を行うと共に、針振り制御装置及び布押さえ制御装置としての機能を果たすようになっている。
制御装置1には、モード切替装置10が接続しており、制御装置1のモードを切り替えることができるように構成されている。
1つのモードは通常モードであり、ニーリフター2の操作に基づいて布押さえ上下機構8の制御のみを行い、ニーリフター2の操作により布押さえ棒80を上下させ、布押さえ81の上げ下ろしだけを行うモードである。即ち制御装置1は布押さえ制御装置としてのみ機能し、このモードでは、操作者はニーリフター2を操作して布押さえ81の上げ下ろしのみを行う。
他のモードはフリーモーション縫いモードであり、ニーリフター2の操作により針振り機構7と布押さえ上下機構8を選択的に制御するモードである。即ち制御装置1は針振り制御装置としての機能と布押さえ制御装置としての機能を選択的に果たすモードである。この選択はミシン上軸位相検出装置3からの信号により制御装置1が判断して行うようになっている。
【0015】
即ち、ミシン上軸位相検出装置3からの信号によりミシンが停止していると認定したときは、制御装置1は布押さえ制御装置として機能し、作業者がニーリフター2を操作すると、操作検出装置20により該操作を検出し、同時に布押さえ検出装置4から布押さえ棒80の状態を検出して、布押さえ上下機構8を制御し、布押さえ81の上げ又は下しを行うように構成されている。
【0016】
一方、ミシン上軸位相検出装置3からの信号によりミシンが稼働中と認定したときは、制御装置1は針振り制御装置として機能し、作業者がニーリフター2を操作すると、操作検出装置20により該操作と操作量を検出し、針振り機構7を駆動し、該操作量に応じた振幅で針62を振らすように構成されている。
以上のように、ミシン上軸位相検出装置3からの信号によりミシンが稼働中か停止中かを判断し、それに応じてニーリフター2の操作により制御内容を変えるように構成されている。即ち、ミシンが稼働中の時は、布押さえ81を上げ下ろしすることはないから、稼働中であれば針振り機構7を制御する。またミシンが停止中の時は、針62を幅方向に振ることはないので、布押さえ上下機構8を制御するようになっている。
【0017】
なおこの実施形態では、フリーモーション縫いの際に、制御装置1は同時にミシンモータ6を制御してミシンの縫い速度の制御を同時に行うようになっている。即ち、針振り機構7を制御して針62を幅方向に振らせている時には、ミシンの速度を落とすように制御し、針62を幅方向に振らせない時にはミシンの速度を上げるように制御する構成になっている。これにより、作業性の向上と縫い品質の向上を図ることができる。
【0018】
図2により動作を説明する。
モード切替装置10により現在のモードを確認し(ステップS1)、フリーモーション縫いモードであり、針振り機構7を制御するモードであれば、ミシン上軸位相検出装置3からの信号によりミシン停止中であるか否か確認する(ステップS2)。ステップS1で通常モードであれば、ニーリフター2の操作により布押さえ上下機構8のみの制御を行う(ステップS5)。
ステップS2で、ミシン停止中でなく稼働中であれば、ニーリフター2の操作により針振り機構7の制御を行い(ステップS3)、ニーリフター2の操作量に応じて針62を振らせて縫いを行う。同時にミシンモータ6の速度制御を行うことも可能である。ミシン上軸位相検出装置3からの信号によりミシンが停止したことを検知すると(ステップS4)、ステップS5に移行する。
またステップS2でミシンが停止中の時もステップS5に移行する。ステップ5ではニーリフター2の操作により布押さえ上下機構8のみの制御を行う。
【0019】
以上の実施形態では、作業者の膝により操作するニーリフター2を用いて、ミシンの稼働状態に応じて布押さえ81の上げ下げと、針62の振りとを両方行えるため、作業者の負担が大幅に軽減する。特に、作業者が布を自由に移動させて縫いを実行するフリーモーション縫いにおいては、膝の操作により2つの機能を果たせるため、その効果が大きい。更に針62の振幅に応じてミシンモータ6の速度制御を行う場合には、目飛び、糸切れなどの発生を防止できる効果がある。
【符号の説明】
【0020】
1:制御装置、2:ニーリフター、3:ミシン上軸位相検出装置、4:布押さえ検出装置、6:ミシンモータ、7:針振り機構、8:布押さえ上下機構、10:モード切替装置、20:操作検出装置、21:膝当て部、22:レバー、23:リンク機構、24:ポテンショメータ、60:主軸、61:針棒上下機構、62:針、65:針棒支持体、70:振幅モータ、71:振幅歯車、72:振幅ロッド、80:布押さえ棒、81:布押さえ、82:ステッピングモータ、83:レバー。
【特許請求の範囲】
【請求項1】
針振り機構と布押さえ上下機構を備えたミシンにおいて、
作業者が操作する操作装置と、
該操作手段の操作とその操作量を検出する操作検出装置と、
ミシンの針が稼働状態か停止状態かを検出する状態検出装置と、
前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が稼働状態の時には、前記針振り機構を制御して、前記操作量に応じて針振り動作を行わせる針振り制御装置と、
前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が停止状態の時には、前記布押さえ上下機構を制御して前記操作に応じて布押さえを上下させる布押さえ制御装置と、
を備えたことを特徴とする針振り機構と布押さえ上下機構を備えたミシン。
【請求項2】
前記操作装置が、作業者が膝を用いて操作するニーリフターである、
請求項1の針振り機構と布押さえ上下機構を備えたミシン。
【請求項3】
前記針振り機構による針振り動作の振幅量に対応して、ミシンの運転速度を制御するミシン運転速度制御装置を、更に備えた、
請求項1の針振り機構と布押さえ上下機構を備えたミシン。
【請求項1】
針振り機構と布押さえ上下機構を備えたミシンにおいて、
作業者が操作する操作装置と、
該操作手段の操作とその操作量を検出する操作検出装置と、
ミシンの針が稼働状態か停止状態かを検出する状態検出装置と、
前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が稼働状態の時には、前記針振り機構を制御して、前記操作量に応じて針振り動作を行わせる針振り制御装置と、
前記操作装置の操作が操作検出装置により検出された時、前記状態検出手段によりミシンの針が停止状態の時には、前記布押さえ上下機構を制御して前記操作に応じて布押さえを上下させる布押さえ制御装置と、
を備えたことを特徴とする針振り機構と布押さえ上下機構を備えたミシン。
【請求項2】
前記操作装置が、作業者が膝を用いて操作するニーリフターである、
請求項1の針振り機構と布押さえ上下機構を備えたミシン。
【請求項3】
前記針振り機構による針振り動作の振幅量に対応して、ミシンの運転速度を制御するミシン運転速度制御装置を、更に備えた、
請求項1の針振り機構と布押さえ上下機構を備えたミシン。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−46718(P2013−46718A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−186619(P2011−186619)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000002244)蛇の目ミシン工業株式会社 (79)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000002244)蛇の目ミシン工業株式会社 (79)
【Fターム(参考)】
[ Back to top ]