
鋼管の建入れ誤差の測定システム、鋼管の建入れ誤差の測定方法、及び逆打ち支柱の建入れ方法
【課題】鋼管の建入れ誤差の測定に使用する装置の設置作業を容易にすると共に、鋼管の建入れ姿勢を修正しながらの建入れ誤差の測定を可能にする。
【解決手段】地盤に建入れられた逆打ち支柱10の建入れ誤差を、逆打ち支柱10の内部に設けられたターゲット50の位置に基づいて測定するシステム10であって、逆打ち支柱10の頭部に、ターゲット50を撮影するように設置されたカメラ110と、逆打ち支柱10の頭部に設置された傾斜計120と、カメラ110の撮像情報に基づいてターゲット50の位置を抽出し、傾斜計120の計測値に基づいてカメラ110の光軸112の鉛直軸に対する傾斜角度を算出し、算出した傾斜角度に基づいてターゲット50の位置を補正するコンピュータ130とを備える。
【解決手段】地盤に建入れられた逆打ち支柱10の建入れ誤差を、逆打ち支柱10の内部に設けられたターゲット50の位置に基づいて測定するシステム10であって、逆打ち支柱10の頭部に、ターゲット50を撮影するように設置されたカメラ110と、逆打ち支柱10の頭部に設置された傾斜計120と、カメラ110の撮像情報に基づいてターゲット50の位置を抽出し、傾斜計120の計測値に基づいてカメラ110の光軸112の鉛直軸に対する傾斜角度を算出し、算出した傾斜角度に基づいてターゲット50の位置を補正するコンピュータ130とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地盤に建入れられた鋼管の建入れ誤差を測定する測定システム、測定方法、及び、逆打ち支柱の建入れ方法に関する。
【背景技術】
【0002】
逆打ち工法により建物の地下架構を構築する際には、地盤を掘削する前に建物の躯体の荷重を支持するための逆打ち支柱として鋼管を地盤内に埋設する。この鋼管が傾斜すると、梁との取り合い、地上鉄骨の施工などに大きな影響を及ぼすため、鋼管を埋設する際には鉛直精度を確保することが重要である。
【0003】
このため、逆打ち支柱としての鋼管の建入れはその誤差を測定しながら行っており、例えば、鋼管内部に設けたプレートに目印を付与し、鋼管の頭部にレーザ鉛直器を設置し、目印とレーザ光との位置関係に基づいて、鋼管の建入れ誤差を測定している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−117803号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の測定方法では、レーザ鉛直器を水平に(レーザの光軸が鉛直になるように)高精度に設置する必要があり、高度な作業を要求される。また、逆打ち支柱の建入れ姿勢を修正した場合、レーザ鉛直器の水平性が失われることから、逆打ち支柱の建入れ姿勢を修正しながら建入れ誤差を測定することができない。
【0006】
本発明は、上記の問題に鑑みなされたものであり、鋼管の建入れ誤差の測定に使用する装置の設置作業を容易にすると共に、鋼管の建入れ姿勢を修正しながらの建入れ誤差の測定を可能にすることを課題とするものである。
【課題を解決するための手段】
【0007】
本発明に係る鋼管の建入れ誤差の測定システムは、地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けられた指標の位置に基づいて測定するシステムであって、前記鋼管の頭部に、前記指標を撮影するように設置されたカメラと、前記鋼管の頭部に設置された傾斜計と、前記カメラの撮像情報に基づいて前記指標の位置を抽出する指標位置抽出部と、前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出し、前記指標位置抽出部が抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正する指標位置補正部と、を備える。
【0008】
前記鋼管の建入れ誤差の測定システムにおいて、前記指標位置補正部は、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出してもよい。
【0009】
また、本発明に係る鋼管の建入れ誤差の測定方法は、地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けた指標の位置に基づいて測定する方法であって、前記鋼管の頭部にカメラ及び傾斜計を設置して前記カメラで前記指標を撮影するステップと、前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、を備える。
【0010】
前記鋼管の建入れ誤差の測定方法において、前記傾斜角度を算出するステップでは、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出してもよい。
【0011】
前記鋼管の建入れ誤差の測定方法は、前記関係式を求めるためのステップを備えてもよく、当該ステップでは、前記鋼管の頭部にカメラ及び前記傾斜計を設置して前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第1ステップと、前記カメラ及び前記傾斜計を前記カメラを中心として鉛直軸周りに180°回転させて、前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第2ステップと、前記第1ステップ及び前記第2ステップで抽出された前記指標の位置座標の平均値を算出する第3ステップと、前記第3ステップで算出した前記平均値に基づいて前記第1ステップにおける前記傾斜角度を算出する第4ステップと、を複数回実施して前記傾斜計の計測値と前記傾斜角度との線型方程式を求めてもよい。
【0012】
また、本発明に係る逆打ち支柱の建入れ方法は、地盤に逆打ち支柱を建入れる方法であって、頭部にカメラ及び傾斜計を設置し、内部に指標を設けた前記逆打ち支柱を地盤に建入れ、前記カメラで前記指標を撮影するステップと、前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、補正した前記指標の位置に基づいて、前記逆打ち支柱の建入れ誤差を算出するステップと、算出した前記建入れ誤差が減少するように前記逆打ち支柱の建入れ姿勢を修正するステップと、を備える。
【発明の効果】
【0013】
本発明によれば、鋼管の建入れ誤差の測定に使用する装置の設置作業が容易になると共に、鋼管の建入れ姿勢を修正しながらの建入れ誤差の測定が可能になる。
【図面の簡単な説明】
【0014】
【図1】地盤内に建て込まれる逆打ち支柱を示す図である。
【図2】建入れ誤差の測定システムの概略を示す図である。
【図3】コンピュータの概略構成を示すブロック図である。
【図4】傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係を示す図である。
【図5】傾斜計の計測データ(αx,αy)とカメラの傾斜角度(βx,βy)との関係を示すグラフである。
【図6】下記(1)式を求める手順を示すフローチャートである。
【図7】下記(1)式を求める手順を説明するための図である。
【図8】逆打ち支柱の建入れ誤差(Xr,Yr)を測定する手順を示すフローチャートである。
【図9】コンピュータによる位置座標(Xr,Tr)の算出処理を説明するためのフローチャートである。
【図10】(A)〜(E)は、逆打ち支柱を建入れる作業手順を示す図である。
【図11】逆打ち支柱を建入れる作業手順を示す図である。
【図12】逆打ち支柱10の建入れ姿勢を修正する手順を説明するためのフローチャートである。
【発明を実施するための形態】
【0015】
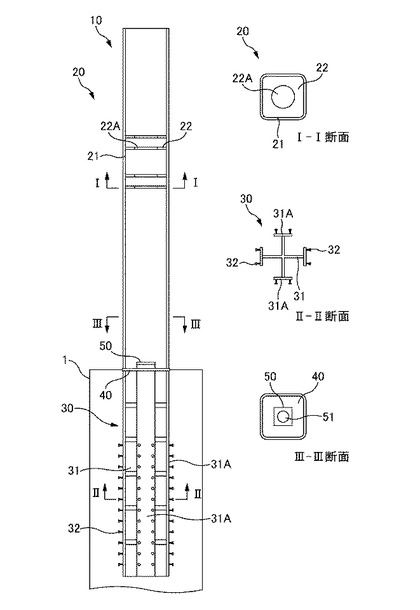
以下、本発明の一実施形態について図面を参照しながら説明する。図1は、地盤内に建て込まれる逆打ち支柱10を示す図である。この図に示すように、逆打ち支柱10は、上部の柱部20と下部の杭部30とからなり、柱部20と杭部30の間にはベースプレート40が介在している。
【0016】
杭部30はいわゆるクロスH型鋼31からなり、フランジ31Aの下端部近傍の外面にスタッド32が打設されている。この杭部30は、鉄筋コンクリート製の杭1に埋設される。柱部20は断面矩形の鋼管21からなり、鋼管21の内部の各階の梁が接続されるべき高さ位置にはダイヤフラム22が取り付けられている。鋼管21に取り付けられたダイヤフラム22には、円形の孔22Aが形成されており、地上架構を構築する際には、この孔22Aを通して、鋼管21の内部にコンクリートを充填することでCFT柱とする。
【0017】
また、ベースプレート40の上面には、逆打ち支柱10の建入れ誤差の測定に使用する板状のターゲット50が取付けられている。このターゲット50の上面には、円状の反射鏡51が貼り付けられており、ターゲット50は、反射鏡51の中心が逆打ち支柱10の通り芯が通る位置(鋼管21の中心軸が通る位置)と一致するように配されている。
【0018】
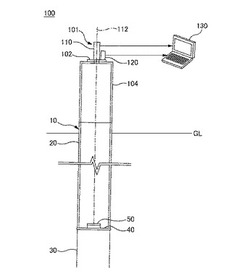
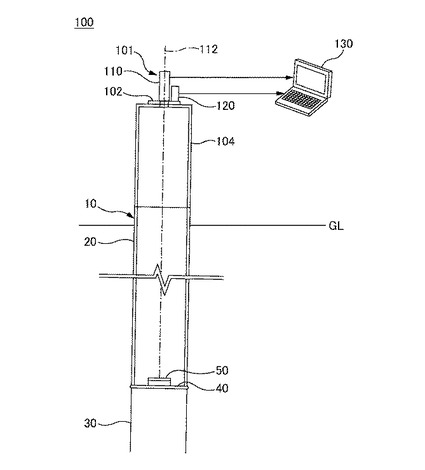
図2は、建入れ誤差の測定システム100の概略を示す図である。この図に示すように、建入れ誤差の測定システム100は、逆打ち支柱10の頭部に設置される測定ユニット101と、コンピュータ130とを備えている。測定ユニット101は、プレート102と、その上に設置されたカメラ110及び傾斜計120とを備えている。コンピュータ130は、カメラ110及び傾斜計120と有線又は無線で接続されており、カメラ110の撮像データ及び傾斜計120の計測データを受信する。また、コンピュータ130には、カメラ110の撮像データ及び傾斜計120の計測値に基づいて逆打ち支柱10の建入れ誤差を算出する処理を実行するためのプログラムがインストールされている。
【0019】
逆打ち支柱10の頭部にはヤットコ104が設置され、このヤットコ104の上面には基準線が記されており、プレート102は、ヤットコ104の上面に基準線に合わせて設置される。プレート102及びヤットコ104の上面には、逆打ち支柱10の通り芯が通過する開口が形成されており、この開口を光軸112が通過するように、カメラ110が下向きに設置されている。即ち、カメラ110は、ターゲット50の反射鏡51を撮影するように設置されている。
【0020】
傾斜計120は、通常は地盤の傾斜等を計測するのに用いられるひずみゲージ式の傾斜計であり、設置面(プレート102)の水平面に対する直交2方向(X方向及びY方向)の傾斜角度αx,αyを計測する。
【0021】
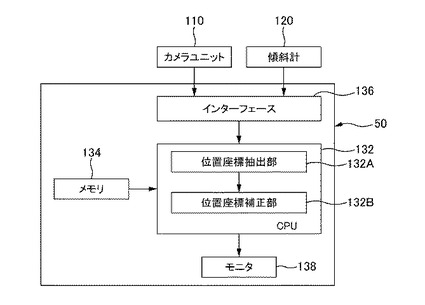
図3は、コンピュータ130の概略構成を示すブロック図である。この図に示すように、コンピュータ130は、CPU132と、メモリ134と、インターフェース136と、モニタ138とを備えている。CPU132は、位置座標抽出部132Aと、位置座標補正部132Bとを備えている。インターフェース136は、カメラ110から出力された撮像データと、傾斜計120から出力された計測データ(αx,αy)とを入力する。また、メモリ134には、反射鏡51の中心点の位置座標(Xt,Yt)を抽出し、その値を補正する処理を実行するためのプログラムが格納されており、CPU132は、該プログラムに従って処理を実行し、算出した値をモニタ138に表示させる。
【0022】
位置座標抽出部132Aは、インターフェース136が入力した撮像データに基づいて反射鏡51の中心点の位置座標(Xt,Yt)を抽出する。なお、この座標系の原点は、反射鏡51の高さの面と光軸112との交点である。そして、位置座標補正部132Bは、傾斜計120の計測データ(αx,αy)に基づいて位置座標(Xt,Tt)を補正して、実際の(即ち、カメラ110が正確に水平(光軸112が鉛直)に設置された場合の)位置座標(Xr,Yr)を算出する。
【0023】
ここで、位置座標補正部132Bは、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)との関係式(下記(1)式)に基づいて、カメラ110の傾斜角度(βx,βy)を算出し、傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係式(下記(2)式)に基づいて、位置座標(Xr,Yr)を算出する。なお、ax,bx,ay,by,Lについては後述する。
(βx,βy)=(ax・αx+bx,ay・αy+by)…(1)
(Xr,Yr)=(Xt+Lsinβx,Yt+Lsinβy)…(2)
【0024】
以下、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)との関係、及び、傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係に説明する。
【0025】
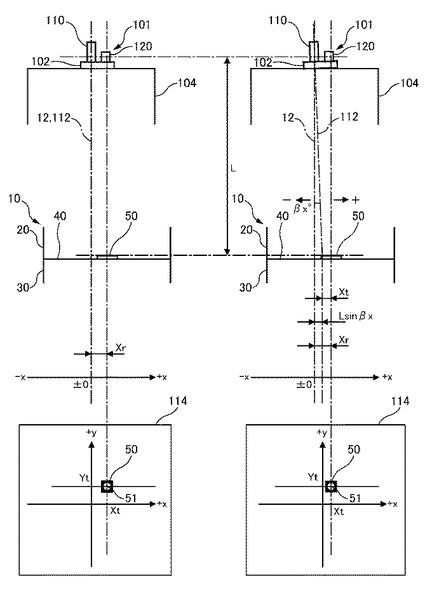
図4は、傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係を示す図である。なお、図4では、X方向についてのみ示しているが、Y方向も同様である。図4の左側に示すように、カメラ110の傾斜角度(βx,βy)が(0,0)である場合には、逆打ち支柱10が正確に建入れられた場合の通り芯12と光軸112とが一致することにより、ターゲット50の実際の位置座標(Xr,Yr)とカメラ110の撮影画像114中の位置座標(Xt,Yt)とが一致する。
【0026】
一方、図4の右側に示すように、カメラ110が傾斜し、カメラ110からターゲット50までの距離がLである場合には、ターゲット50の実際の位置座標(Xr,Yr)とカメラ110の撮影画像114中の位置座標(Xt,Yt)とが乖離し、上記(2)式の関係が得られる。
【0027】
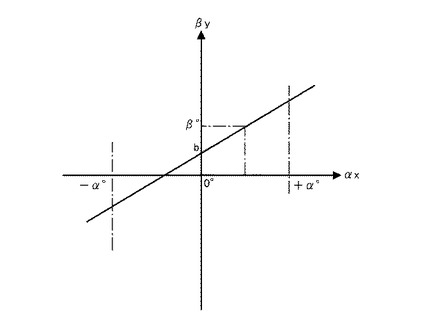
図5は、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)との関係を示すグラフである。なお、このグラフでは、X方向の値であるαxとβxとについてのみ示すが、Y方向の値であるαyとβyとについても同様である。このグラフに示すように、傾斜計120の測定容量は±α´°(例えば、±1〜5°)であり、その範囲では傾斜計120のひずみゲージの抵抗変化量と計測値(αx,αy)とに線形性が成り立つことから、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)とにも上記(1)式で示すような線形性が成り立つと仮定することができる。
【0028】
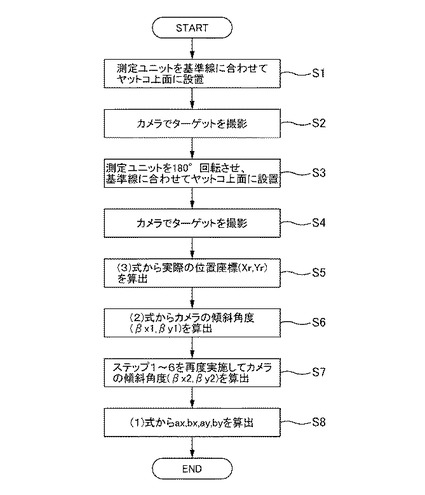
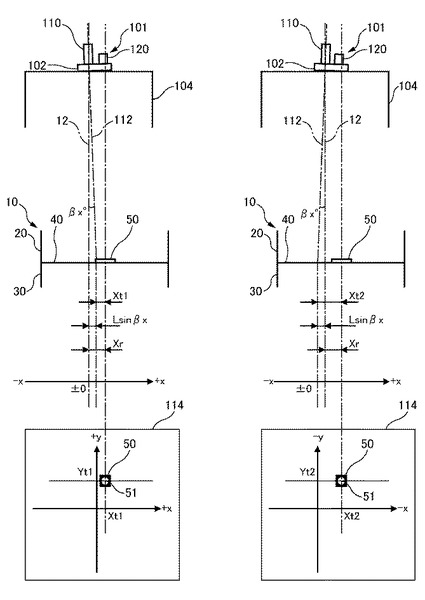
図6は、上記(1)式を求める手順を示すフローチャートであり、図7は、上記(1)式を求める手順を説明するための図である。まず、図7の左側に示すように、測定ユニット101を、ヤットコ104の上面に基準線に合わせて設置する(ステップ1)。本ステップで測定ユニット101を設置する位置が、建入れ誤差の測定時の設置位置である。次に、カメラ110でターゲット50を撮影する(ステップ2)。本ステップにおいて、位置座標抽出部132Aが、位置座標(Xt1,Yt1)を抽出する。
【0029】
次に、図7の右側に示すように、測定ユニット101をカメラ110の光軸112を中心として縦軸周りに180°回転させてヤットコ104上に基準線に合わせて設置する(ステップ3)。次に、カメラ110でターゲット50を撮影する(ステップ4)。本ステップにおいて、位置座標抽出部132Aが、位置座標(Xt2,Yt2)を抽出する。
【0030】
次に、下記(3)式から、実際の位置座標(Xr,Yr)を算出する(ステップ5)。ここで、ステップ1、2でのカメラ110の傾斜角度が(βx1,βy1)である場合、ステップ3、4でのカメラ110の傾斜角度は(−βx1,−βy1)となり、ステップ2で抽出した位置座標(Xt1,Yt1)とステップ4で抽出した位置座標(Xt2,Yt2)との平均値を算出することで、実際の位置座標(Xr,Yr)を得ることができる。
(Xr,Yr)=((Xt1−Xt2)/2,(Yt1−Yt2)/2) …(3)
【0031】
次に、ステップ5で算出した位置座標(Xr,Yr)を上記(2)式に代入することで、カメラ110の傾斜角度(βx1,βy1)を算出する(ステップ6)。
【0032】
そして、ステップ1〜6を再度実施することにより、2回目の測定ユニット101の設置時の傾斜角度(βx2,βy2)を得る(ステップ7)。
【0033】
ここで、カメラ110の傾斜角度(βx,βy)が(βx1,βy1)のとき、傾斜計120の計測データが(αx1,αx1)であり、カメラ110の傾斜角度(βx,βy)が(βx2,βy2)のとき、傾斜計120の計測データが(αx2,αx2)であるとして、上記(1)式のax,bx,ay,byを算出する(ステップ8)。
ax=(βx1−βx2)/(αx1−αx2)
bx=(αx1・βx2−αx2・βx1)/(αx1−αx2)
ay=(βy1−βy2)/(αy1−αy2)
by=(αy1・βy2−αy2・βy1)/(αy1−αy2)
【0034】
以上のようにして求めたカメラ110の傾斜角度(βx,βy)と傾斜計120の測定値(αx,αy)との関係式(上記(1)式)を含むプログラムがメモリ134に格納されており、CPU132が当該プログラムに従って、実際の位置座標(Xr,Yr)を算出する。
【0035】
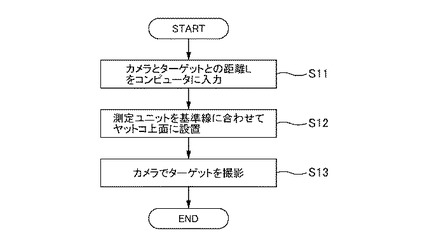
図8は、逆打ち支柱10の建入れ誤差(Xr,Yr)を測定する手順を示すフローチャートである。このフローチャートに示すように、まず、コンピュータ130にカメラ110とターゲット50との距離Lを入力する(ステップ11)。次に、測定ユニット101をヤットコ104上に基準線に合わせて設置する(ステップ12)。次に、カメラ110でターゲット50を撮影する(ステップ13)。
【0036】
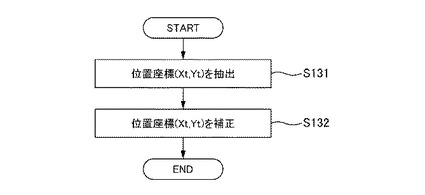
図9は、コンピュータ130による位置座標(Xr,Tr)の算出処理を説明するためのフローチャートである。このフローチャートに示すように、カメラ110でターゲット50が撮影されると、位置座標抽出部132Aが、撮影データから位置座標(Xt,Yt)を抽出する(ステップ131)。そして、位置座標補正部132Bが、傾斜計120の計測値(αx,αy)からカメラ110の傾斜角度(βx,βy)を上記(1)式により算出し、位置座標(Xt,Yt)、傾斜角度(βx,βy)及びカメラ110とターゲット50のとの距離Lに基づいて、上記(2)式により位置座標(Xr,Yr)を算出する(ステップ132)。
【0037】
以上により、カメラ110の光軸112が鉛直軸に対して傾斜することによるターゲット50の位置座標(Xt,Yt)の測定誤差を補正することができ、カメラ110の逆打ち支柱10上での設置状態に関わらず、逆打ち支柱10の建入れ誤差(Xr,Yr)を正確に測定することができる。従って、カメラ110の設置作業が容易である。
【0038】
また、逆打ち支柱10の建入れを補正してその頭部に設置されたカメラ110の設置状態が変化しても、カメラ110の設置状態を修正することなく、変化した状態での正確な測定が可能であることから、逆打ち支柱10の建入れの姿勢を修正しながら建入れ誤差(Xr,Yr)を測定することができる。
【0039】
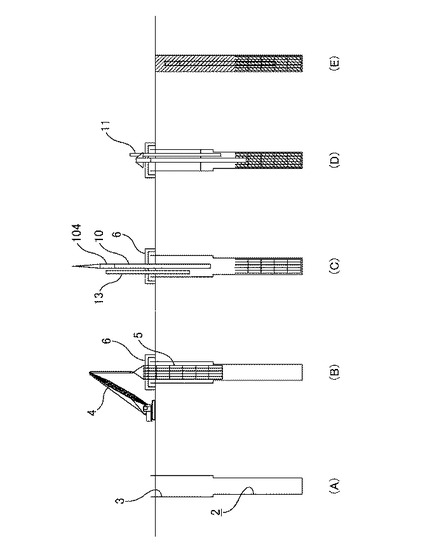
図10(A)〜(E)及び図11は、逆打ち支柱10を建入れる作業手順を示す図である。まず、図10(A)に示すように、アースドリル掘削機等の公知の掘削機により杭1を構築するための孔2を掘削し、底ざらえやスライム処理等の必要な作業を実施する。また、表層部にケーシング3を建て込む。次に、図10(B)に示すように、逆打ち支柱10を支持するための架台6を、孔2を跨ぐように地上に設置する。そして、クレーン4で鉄筋籠5を吊り下げて孔2の底まで降下させることにより、孔2内に鉄筋籠5を建て込む。
【0040】
次に、図10(C)に示すように、逆打ち支柱10の頭部にヤットコ104を取り付け、その上部に測定ユニット101を基準線に合わせて設置する。そして、逆打ち支柱10を建起こしてから孔1内に建て込む。また、安定液を供給するための水管13を孔1内に建て込む。
【0041】
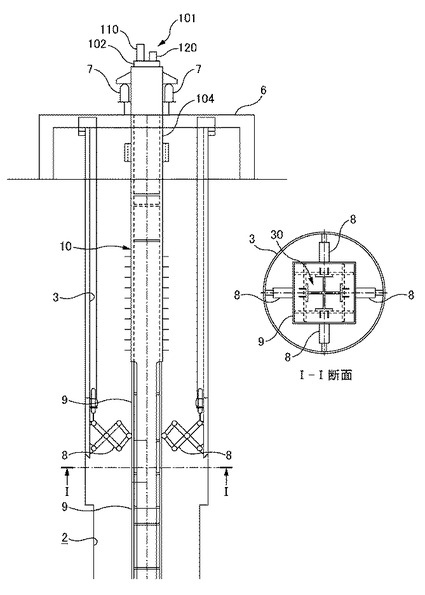
次に、図11に示すように、逆打ち支柱10の頭部の高さと水平方向の位置とを調整する。その後、逆打ち支柱10の下部の水平方向の位置を調整することにより、逆打ち支柱10の通り芯の鉛直度(建入れ姿勢)を調整する。
【0042】
架台6には、複数のジャーナルジャッキ7を設置し、この複数のジャーナルジャッキ7でヤットコ104を介して逆打ち支柱10を支持する。ジャーナルジャッキ7は、上下方向に伸縮するスクリュー式ジャッキであり、このジャーナルジャッキ7を伸縮させることにより、逆打ち支柱10の頭部の高さを調整することができる。
【0043】
また、ケーシング3と逆打ち支柱10との間には、複数(例えば、図示するように4個)のパンタグラフジャッキ8とガイド管9とを設置する。ガイド管9には逆打ち支柱10を挿通し、複数のパンタグラフジャッキ8は、ガイド管9の周りに所定間隔おきに配する。複数のパンタグラフジャッキ8は、パンタグラフ型の油圧ジャッキであり、ケーシング3に反力を取ってガイド管9を孔2の中心に向けて押圧する。この複数のパンタグラフジャッキ8を孔2の径方向に伸縮させることにより、逆打ち支柱10の下部の水平方向の位置を調整することができる。
【0044】
次に、図10(D)に示すように、孔2内にトレミー管11を建て込んで孔2の下部にコンクリートを打設する。この際、逆打ち支柱10の下部の水平方向の位置を調整することにより、逆打ち支柱10の建入れ姿勢を調整する。
【0045】
そして、トレミー管11を撤去してからコンクリートを養生し、逆打ち支柱10を仮固定した状態で、架台6及びヤットコ104を撤去する。その後、図10(E)に示すように、孔2の上部に土を埋め戻すことにより、逆打ち支柱10を地盤に埋設された状態にする。
【0046】
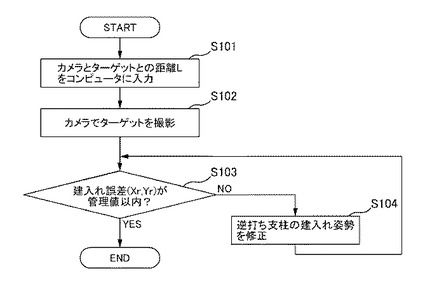
図12は、逆打ち支柱10の建入れ姿勢を修正する手順を説明するためのフローチャートである。このフローチャートに示すように、まず、コンピュータ130にカメラ110とターゲット50との距離Lを入力する(ステップ101)。ここで、逆打ち支柱10を建入れる前に、測定ユニット101がヤットコ104上に基準線に合わせて設置されている。
【0047】
次に、カメラ110でターゲット50を撮影する(ステップ102)。上述したように、カメラ110でターゲット50が撮影されると、位置座標抽出部132Aが位置座標(Xt,Yt)を抽出し、そして、位置座標補正部132Bが、傾斜計120の計測値(αx,αy)からカメラ110の傾斜角度(βx,βy)を算出し、傾斜角度(βx,βy)に基づいて位置座標(Xt,Yt)を補正することにより位置座標(Xr,Yr)を算出する。
【0048】
次に、建入れ誤差の測定システム100で測定された建入れ誤差(Xr,Yr)が管理値以内であるか否かを判断し(ステップ103)、管理値外である場合には、パンタグラフジャッキ8で逆打ち支柱10の建入れ姿勢を修正する(ステップ104)。この際、建入れ誤差の測定システム100によって測定される建入れ誤差(Xr,Yr)が管理値以内になるまで、パンタグラフジャッキ8による逆打ち支柱10の建入れ姿勢の修正を継続する。
【0049】
以上説明したように、カメラ110を逆打ち支柱10の頭部に設置した後、カメラ110の逆打ち支柱10上での設置状態に関わらず、しかも自動で、逆打ち支柱10の建入れ誤差(Xr,Yr)を正確に測定することができる。従って、逆打ち支柱10を建入れてから杭1のコンクリートを打設する前のみならず、その後における杭1のコンクリートの打設中にも、逆打ち支柱10の建入れ誤差(Xr,Yr)を測定しながら、逆打ち支柱10の建入れ姿勢を修正することができる。
【0050】
なお、上記実施形態では、杭部30をクロスH型鋼31により構成したが、これに限らず、H型鋼や角鋼管など適宜な鋼材を用いることができる。また、上記実施形態では、柱部20を角鋼管21により構成したが、これに限らず、丸鋼管を用いることもできる。
【0051】
また、上記実施形態では、地盤に建て込んだ逆打ち支柱10の建入誤差を測定する場合について説明したが、これに限らず、下端にベースプレート40が接続された鋼管を建て込む場合であれば本発明を適用できる。また、必ずしも、ベースプレート40を備える必要はなく、鋼管の内部を塞ぐようにプレートが取り付けられていれば、本発明を適用できる。
【符号の説明】
【0052】
1 杭、2 孔、3 ケーシング、4 クレーン、5 鉄筋籠、6 架台、7 ジャーナルジャッキ、8 パンタグラフジャッキ、9 ガイド管、10 逆打ち支柱(鋼管)、11 トレミー管、12 通り芯、13 水管、20 柱部、21 鋼管、22 ダイヤフラム、22A 孔、30 杭部、31 H型鋼、31A フランジ、32 スタッド、40 ベースプレート、50 ターゲット、51 反射鏡、100 建入れ誤差の測定システム、101 測定ユニット、102 プレート、104 ヤットコ、110 カメラ、112 光軸、114 撮影画像、120 傾斜計、130 コンピュータ、132 CPU、132A 位置座標抽出部、132B 位置座標補正部、134 メモリ、136 インターフェース、138 モニタ
【技術分野】
【0001】
本発明は、地盤に建入れられた鋼管の建入れ誤差を測定する測定システム、測定方法、及び、逆打ち支柱の建入れ方法に関する。
【背景技術】
【0002】
逆打ち工法により建物の地下架構を構築する際には、地盤を掘削する前に建物の躯体の荷重を支持するための逆打ち支柱として鋼管を地盤内に埋設する。この鋼管が傾斜すると、梁との取り合い、地上鉄骨の施工などに大きな影響を及ぼすため、鋼管を埋設する際には鉛直精度を確保することが重要である。
【0003】
このため、逆打ち支柱としての鋼管の建入れはその誤差を測定しながら行っており、例えば、鋼管内部に設けたプレートに目印を付与し、鋼管の頭部にレーザ鉛直器を設置し、目印とレーザ光との位置関係に基づいて、鋼管の建入れ誤差を測定している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−117803号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の測定方法では、レーザ鉛直器を水平に(レーザの光軸が鉛直になるように)高精度に設置する必要があり、高度な作業を要求される。また、逆打ち支柱の建入れ姿勢を修正した場合、レーザ鉛直器の水平性が失われることから、逆打ち支柱の建入れ姿勢を修正しながら建入れ誤差を測定することができない。
【0006】
本発明は、上記の問題に鑑みなされたものであり、鋼管の建入れ誤差の測定に使用する装置の設置作業を容易にすると共に、鋼管の建入れ姿勢を修正しながらの建入れ誤差の測定を可能にすることを課題とするものである。
【課題を解決するための手段】
【0007】
本発明に係る鋼管の建入れ誤差の測定システムは、地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けられた指標の位置に基づいて測定するシステムであって、前記鋼管の頭部に、前記指標を撮影するように設置されたカメラと、前記鋼管の頭部に設置された傾斜計と、前記カメラの撮像情報に基づいて前記指標の位置を抽出する指標位置抽出部と、前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出し、前記指標位置抽出部が抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正する指標位置補正部と、を備える。
【0008】
前記鋼管の建入れ誤差の測定システムにおいて、前記指標位置補正部は、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出してもよい。
【0009】
また、本発明に係る鋼管の建入れ誤差の測定方法は、地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けた指標の位置に基づいて測定する方法であって、前記鋼管の頭部にカメラ及び傾斜計を設置して前記カメラで前記指標を撮影するステップと、前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、を備える。
【0010】
前記鋼管の建入れ誤差の測定方法において、前記傾斜角度を算出するステップでは、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出してもよい。
【0011】
前記鋼管の建入れ誤差の測定方法は、前記関係式を求めるためのステップを備えてもよく、当該ステップでは、前記鋼管の頭部にカメラ及び前記傾斜計を設置して前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第1ステップと、前記カメラ及び前記傾斜計を前記カメラを中心として鉛直軸周りに180°回転させて、前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第2ステップと、前記第1ステップ及び前記第2ステップで抽出された前記指標の位置座標の平均値を算出する第3ステップと、前記第3ステップで算出した前記平均値に基づいて前記第1ステップにおける前記傾斜角度を算出する第4ステップと、を複数回実施して前記傾斜計の計測値と前記傾斜角度との線型方程式を求めてもよい。
【0012】
また、本発明に係る逆打ち支柱の建入れ方法は、地盤に逆打ち支柱を建入れる方法であって、頭部にカメラ及び傾斜計を設置し、内部に指標を設けた前記逆打ち支柱を地盤に建入れ、前記カメラで前記指標を撮影するステップと、前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、補正した前記指標の位置に基づいて、前記逆打ち支柱の建入れ誤差を算出するステップと、算出した前記建入れ誤差が減少するように前記逆打ち支柱の建入れ姿勢を修正するステップと、を備える。
【発明の効果】
【0013】
本発明によれば、鋼管の建入れ誤差の測定に使用する装置の設置作業が容易になると共に、鋼管の建入れ姿勢を修正しながらの建入れ誤差の測定が可能になる。
【図面の簡単な説明】
【0014】
【図1】地盤内に建て込まれる逆打ち支柱を示す図である。
【図2】建入れ誤差の測定システムの概略を示す図である。
【図3】コンピュータの概略構成を示すブロック図である。
【図4】傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係を示す図である。
【図5】傾斜計の計測データ(αx,αy)とカメラの傾斜角度(βx,βy)との関係を示すグラフである。
【図6】下記(1)式を求める手順を示すフローチャートである。
【図7】下記(1)式を求める手順を説明するための図である。
【図8】逆打ち支柱の建入れ誤差(Xr,Yr)を測定する手順を示すフローチャートである。
【図9】コンピュータによる位置座標(Xr,Tr)の算出処理を説明するためのフローチャートである。
【図10】(A)〜(E)は、逆打ち支柱を建入れる作業手順を示す図である。
【図11】逆打ち支柱を建入れる作業手順を示す図である。
【図12】逆打ち支柱10の建入れ姿勢を修正する手順を説明するためのフローチャートである。
【発明を実施するための形態】
【0015】
以下、本発明の一実施形態について図面を参照しながら説明する。図1は、地盤内に建て込まれる逆打ち支柱10を示す図である。この図に示すように、逆打ち支柱10は、上部の柱部20と下部の杭部30とからなり、柱部20と杭部30の間にはベースプレート40が介在している。
【0016】
杭部30はいわゆるクロスH型鋼31からなり、フランジ31Aの下端部近傍の外面にスタッド32が打設されている。この杭部30は、鉄筋コンクリート製の杭1に埋設される。柱部20は断面矩形の鋼管21からなり、鋼管21の内部の各階の梁が接続されるべき高さ位置にはダイヤフラム22が取り付けられている。鋼管21に取り付けられたダイヤフラム22には、円形の孔22Aが形成されており、地上架構を構築する際には、この孔22Aを通して、鋼管21の内部にコンクリートを充填することでCFT柱とする。
【0017】
また、ベースプレート40の上面には、逆打ち支柱10の建入れ誤差の測定に使用する板状のターゲット50が取付けられている。このターゲット50の上面には、円状の反射鏡51が貼り付けられており、ターゲット50は、反射鏡51の中心が逆打ち支柱10の通り芯が通る位置(鋼管21の中心軸が通る位置)と一致するように配されている。
【0018】
図2は、建入れ誤差の測定システム100の概略を示す図である。この図に示すように、建入れ誤差の測定システム100は、逆打ち支柱10の頭部に設置される測定ユニット101と、コンピュータ130とを備えている。測定ユニット101は、プレート102と、その上に設置されたカメラ110及び傾斜計120とを備えている。コンピュータ130は、カメラ110及び傾斜計120と有線又は無線で接続されており、カメラ110の撮像データ及び傾斜計120の計測データを受信する。また、コンピュータ130には、カメラ110の撮像データ及び傾斜計120の計測値に基づいて逆打ち支柱10の建入れ誤差を算出する処理を実行するためのプログラムがインストールされている。
【0019】
逆打ち支柱10の頭部にはヤットコ104が設置され、このヤットコ104の上面には基準線が記されており、プレート102は、ヤットコ104の上面に基準線に合わせて設置される。プレート102及びヤットコ104の上面には、逆打ち支柱10の通り芯が通過する開口が形成されており、この開口を光軸112が通過するように、カメラ110が下向きに設置されている。即ち、カメラ110は、ターゲット50の反射鏡51を撮影するように設置されている。
【0020】
傾斜計120は、通常は地盤の傾斜等を計測するのに用いられるひずみゲージ式の傾斜計であり、設置面(プレート102)の水平面に対する直交2方向(X方向及びY方向)の傾斜角度αx,αyを計測する。
【0021】
図3は、コンピュータ130の概略構成を示すブロック図である。この図に示すように、コンピュータ130は、CPU132と、メモリ134と、インターフェース136と、モニタ138とを備えている。CPU132は、位置座標抽出部132Aと、位置座標補正部132Bとを備えている。インターフェース136は、カメラ110から出力された撮像データと、傾斜計120から出力された計測データ(αx,αy)とを入力する。また、メモリ134には、反射鏡51の中心点の位置座標(Xt,Yt)を抽出し、その値を補正する処理を実行するためのプログラムが格納されており、CPU132は、該プログラムに従って処理を実行し、算出した値をモニタ138に表示させる。
【0022】
位置座標抽出部132Aは、インターフェース136が入力した撮像データに基づいて反射鏡51の中心点の位置座標(Xt,Yt)を抽出する。なお、この座標系の原点は、反射鏡51の高さの面と光軸112との交点である。そして、位置座標補正部132Bは、傾斜計120の計測データ(αx,αy)に基づいて位置座標(Xt,Tt)を補正して、実際の(即ち、カメラ110が正確に水平(光軸112が鉛直)に設置された場合の)位置座標(Xr,Yr)を算出する。
【0023】
ここで、位置座標補正部132Bは、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)との関係式(下記(1)式)に基づいて、カメラ110の傾斜角度(βx,βy)を算出し、傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係式(下記(2)式)に基づいて、位置座標(Xr,Yr)を算出する。なお、ax,bx,ay,by,Lについては後述する。
(βx,βy)=(ax・αx+bx,ay・αy+by)…(1)
(Xr,Yr)=(Xt+Lsinβx,Yt+Lsinβy)…(2)
【0024】
以下、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)との関係、及び、傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係に説明する。
【0025】
図4は、傾斜角度(βx,βy)と位置座標(Xt,Yt)と位置座標(Xr,Yr)との関係を示す図である。なお、図4では、X方向についてのみ示しているが、Y方向も同様である。図4の左側に示すように、カメラ110の傾斜角度(βx,βy)が(0,0)である場合には、逆打ち支柱10が正確に建入れられた場合の通り芯12と光軸112とが一致することにより、ターゲット50の実際の位置座標(Xr,Yr)とカメラ110の撮影画像114中の位置座標(Xt,Yt)とが一致する。
【0026】
一方、図4の右側に示すように、カメラ110が傾斜し、カメラ110からターゲット50までの距離がLである場合には、ターゲット50の実際の位置座標(Xr,Yr)とカメラ110の撮影画像114中の位置座標(Xt,Yt)とが乖離し、上記(2)式の関係が得られる。
【0027】
図5は、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)との関係を示すグラフである。なお、このグラフでは、X方向の値であるαxとβxとについてのみ示すが、Y方向の値であるαyとβyとについても同様である。このグラフに示すように、傾斜計120の測定容量は±α´°(例えば、±1〜5°)であり、その範囲では傾斜計120のひずみゲージの抵抗変化量と計測値(αx,αy)とに線形性が成り立つことから、傾斜計120の計測データ(αx,αy)とカメラ110の傾斜角度(βx,βy)とにも上記(1)式で示すような線形性が成り立つと仮定することができる。
【0028】
図6は、上記(1)式を求める手順を示すフローチャートであり、図7は、上記(1)式を求める手順を説明するための図である。まず、図7の左側に示すように、測定ユニット101を、ヤットコ104の上面に基準線に合わせて設置する(ステップ1)。本ステップで測定ユニット101を設置する位置が、建入れ誤差の測定時の設置位置である。次に、カメラ110でターゲット50を撮影する(ステップ2)。本ステップにおいて、位置座標抽出部132Aが、位置座標(Xt1,Yt1)を抽出する。
【0029】
次に、図7の右側に示すように、測定ユニット101をカメラ110の光軸112を中心として縦軸周りに180°回転させてヤットコ104上に基準線に合わせて設置する(ステップ3)。次に、カメラ110でターゲット50を撮影する(ステップ4)。本ステップにおいて、位置座標抽出部132Aが、位置座標(Xt2,Yt2)を抽出する。
【0030】
次に、下記(3)式から、実際の位置座標(Xr,Yr)を算出する(ステップ5)。ここで、ステップ1、2でのカメラ110の傾斜角度が(βx1,βy1)である場合、ステップ3、4でのカメラ110の傾斜角度は(−βx1,−βy1)となり、ステップ2で抽出した位置座標(Xt1,Yt1)とステップ4で抽出した位置座標(Xt2,Yt2)との平均値を算出することで、実際の位置座標(Xr,Yr)を得ることができる。
(Xr,Yr)=((Xt1−Xt2)/2,(Yt1−Yt2)/2) …(3)
【0031】
次に、ステップ5で算出した位置座標(Xr,Yr)を上記(2)式に代入することで、カメラ110の傾斜角度(βx1,βy1)を算出する(ステップ6)。
【0032】
そして、ステップ1〜6を再度実施することにより、2回目の測定ユニット101の設置時の傾斜角度(βx2,βy2)を得る(ステップ7)。
【0033】
ここで、カメラ110の傾斜角度(βx,βy)が(βx1,βy1)のとき、傾斜計120の計測データが(αx1,αx1)であり、カメラ110の傾斜角度(βx,βy)が(βx2,βy2)のとき、傾斜計120の計測データが(αx2,αx2)であるとして、上記(1)式のax,bx,ay,byを算出する(ステップ8)。
ax=(βx1−βx2)/(αx1−αx2)
bx=(αx1・βx2−αx2・βx1)/(αx1−αx2)
ay=(βy1−βy2)/(αy1−αy2)
by=(αy1・βy2−αy2・βy1)/(αy1−αy2)
【0034】
以上のようにして求めたカメラ110の傾斜角度(βx,βy)と傾斜計120の測定値(αx,αy)との関係式(上記(1)式)を含むプログラムがメモリ134に格納されており、CPU132が当該プログラムに従って、実際の位置座標(Xr,Yr)を算出する。
【0035】
図8は、逆打ち支柱10の建入れ誤差(Xr,Yr)を測定する手順を示すフローチャートである。このフローチャートに示すように、まず、コンピュータ130にカメラ110とターゲット50との距離Lを入力する(ステップ11)。次に、測定ユニット101をヤットコ104上に基準線に合わせて設置する(ステップ12)。次に、カメラ110でターゲット50を撮影する(ステップ13)。
【0036】
図9は、コンピュータ130による位置座標(Xr,Tr)の算出処理を説明するためのフローチャートである。このフローチャートに示すように、カメラ110でターゲット50が撮影されると、位置座標抽出部132Aが、撮影データから位置座標(Xt,Yt)を抽出する(ステップ131)。そして、位置座標補正部132Bが、傾斜計120の計測値(αx,αy)からカメラ110の傾斜角度(βx,βy)を上記(1)式により算出し、位置座標(Xt,Yt)、傾斜角度(βx,βy)及びカメラ110とターゲット50のとの距離Lに基づいて、上記(2)式により位置座標(Xr,Yr)を算出する(ステップ132)。
【0037】
以上により、カメラ110の光軸112が鉛直軸に対して傾斜することによるターゲット50の位置座標(Xt,Yt)の測定誤差を補正することができ、カメラ110の逆打ち支柱10上での設置状態に関わらず、逆打ち支柱10の建入れ誤差(Xr,Yr)を正確に測定することができる。従って、カメラ110の設置作業が容易である。
【0038】
また、逆打ち支柱10の建入れを補正してその頭部に設置されたカメラ110の設置状態が変化しても、カメラ110の設置状態を修正することなく、変化した状態での正確な測定が可能であることから、逆打ち支柱10の建入れの姿勢を修正しながら建入れ誤差(Xr,Yr)を測定することができる。
【0039】
図10(A)〜(E)及び図11は、逆打ち支柱10を建入れる作業手順を示す図である。まず、図10(A)に示すように、アースドリル掘削機等の公知の掘削機により杭1を構築するための孔2を掘削し、底ざらえやスライム処理等の必要な作業を実施する。また、表層部にケーシング3を建て込む。次に、図10(B)に示すように、逆打ち支柱10を支持するための架台6を、孔2を跨ぐように地上に設置する。そして、クレーン4で鉄筋籠5を吊り下げて孔2の底まで降下させることにより、孔2内に鉄筋籠5を建て込む。
【0040】
次に、図10(C)に示すように、逆打ち支柱10の頭部にヤットコ104を取り付け、その上部に測定ユニット101を基準線に合わせて設置する。そして、逆打ち支柱10を建起こしてから孔1内に建て込む。また、安定液を供給するための水管13を孔1内に建て込む。
【0041】
次に、図11に示すように、逆打ち支柱10の頭部の高さと水平方向の位置とを調整する。その後、逆打ち支柱10の下部の水平方向の位置を調整することにより、逆打ち支柱10の通り芯の鉛直度(建入れ姿勢)を調整する。
【0042】
架台6には、複数のジャーナルジャッキ7を設置し、この複数のジャーナルジャッキ7でヤットコ104を介して逆打ち支柱10を支持する。ジャーナルジャッキ7は、上下方向に伸縮するスクリュー式ジャッキであり、このジャーナルジャッキ7を伸縮させることにより、逆打ち支柱10の頭部の高さを調整することができる。
【0043】
また、ケーシング3と逆打ち支柱10との間には、複数(例えば、図示するように4個)のパンタグラフジャッキ8とガイド管9とを設置する。ガイド管9には逆打ち支柱10を挿通し、複数のパンタグラフジャッキ8は、ガイド管9の周りに所定間隔おきに配する。複数のパンタグラフジャッキ8は、パンタグラフ型の油圧ジャッキであり、ケーシング3に反力を取ってガイド管9を孔2の中心に向けて押圧する。この複数のパンタグラフジャッキ8を孔2の径方向に伸縮させることにより、逆打ち支柱10の下部の水平方向の位置を調整することができる。
【0044】
次に、図10(D)に示すように、孔2内にトレミー管11を建て込んで孔2の下部にコンクリートを打設する。この際、逆打ち支柱10の下部の水平方向の位置を調整することにより、逆打ち支柱10の建入れ姿勢を調整する。
【0045】
そして、トレミー管11を撤去してからコンクリートを養生し、逆打ち支柱10を仮固定した状態で、架台6及びヤットコ104を撤去する。その後、図10(E)に示すように、孔2の上部に土を埋め戻すことにより、逆打ち支柱10を地盤に埋設された状態にする。
【0046】
図12は、逆打ち支柱10の建入れ姿勢を修正する手順を説明するためのフローチャートである。このフローチャートに示すように、まず、コンピュータ130にカメラ110とターゲット50との距離Lを入力する(ステップ101)。ここで、逆打ち支柱10を建入れる前に、測定ユニット101がヤットコ104上に基準線に合わせて設置されている。
【0047】
次に、カメラ110でターゲット50を撮影する(ステップ102)。上述したように、カメラ110でターゲット50が撮影されると、位置座標抽出部132Aが位置座標(Xt,Yt)を抽出し、そして、位置座標補正部132Bが、傾斜計120の計測値(αx,αy)からカメラ110の傾斜角度(βx,βy)を算出し、傾斜角度(βx,βy)に基づいて位置座標(Xt,Yt)を補正することにより位置座標(Xr,Yr)を算出する。
【0048】
次に、建入れ誤差の測定システム100で測定された建入れ誤差(Xr,Yr)が管理値以内であるか否かを判断し(ステップ103)、管理値外である場合には、パンタグラフジャッキ8で逆打ち支柱10の建入れ姿勢を修正する(ステップ104)。この際、建入れ誤差の測定システム100によって測定される建入れ誤差(Xr,Yr)が管理値以内になるまで、パンタグラフジャッキ8による逆打ち支柱10の建入れ姿勢の修正を継続する。
【0049】
以上説明したように、カメラ110を逆打ち支柱10の頭部に設置した後、カメラ110の逆打ち支柱10上での設置状態に関わらず、しかも自動で、逆打ち支柱10の建入れ誤差(Xr,Yr)を正確に測定することができる。従って、逆打ち支柱10を建入れてから杭1のコンクリートを打設する前のみならず、その後における杭1のコンクリートの打設中にも、逆打ち支柱10の建入れ誤差(Xr,Yr)を測定しながら、逆打ち支柱10の建入れ姿勢を修正することができる。
【0050】
なお、上記実施形態では、杭部30をクロスH型鋼31により構成したが、これに限らず、H型鋼や角鋼管など適宜な鋼材を用いることができる。また、上記実施形態では、柱部20を角鋼管21により構成したが、これに限らず、丸鋼管を用いることもできる。
【0051】
また、上記実施形態では、地盤に建て込んだ逆打ち支柱10の建入誤差を測定する場合について説明したが、これに限らず、下端にベースプレート40が接続された鋼管を建て込む場合であれば本発明を適用できる。また、必ずしも、ベースプレート40を備える必要はなく、鋼管の内部を塞ぐようにプレートが取り付けられていれば、本発明を適用できる。
【符号の説明】
【0052】
1 杭、2 孔、3 ケーシング、4 クレーン、5 鉄筋籠、6 架台、7 ジャーナルジャッキ、8 パンタグラフジャッキ、9 ガイド管、10 逆打ち支柱(鋼管)、11 トレミー管、12 通り芯、13 水管、20 柱部、21 鋼管、22 ダイヤフラム、22A 孔、30 杭部、31 H型鋼、31A フランジ、32 スタッド、40 ベースプレート、50 ターゲット、51 反射鏡、100 建入れ誤差の測定システム、101 測定ユニット、102 プレート、104 ヤットコ、110 カメラ、112 光軸、114 撮影画像、120 傾斜計、130 コンピュータ、132 CPU、132A 位置座標抽出部、132B 位置座標補正部、134 メモリ、136 インターフェース、138 モニタ
【特許請求の範囲】
【請求項1】
地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けられた指標の位置に基づいて測定するシステムであって、
前記鋼管の頭部に、前記指標を撮影するように設置されたカメラと、
前記鋼管の頭部に設置された傾斜計と、
前記カメラの撮像情報に基づいて前記指標の位置を抽出する指標位置抽出部と、
前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出し、前記指標位置抽出部が抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正する指標位置補正部と、
を備える鋼管の建入れ誤差の測定システム。
【請求項2】
前記指標位置補正部は、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出する請求項1に記載の鋼管の建入れ誤差の測定システム。
【請求項3】
地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けた指標の位置に基づいて測定する方法であって、
前記鋼管の頭部にカメラ及び傾斜計を設置して前記カメラで前記指標を撮影するステップと、
前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、
前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、
抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、
を備える鋼管の建入れ誤差の測定方法。
【請求項4】
前記傾斜角度を算出するステップでは、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出する請求項3に記載の鋼管の建入れ誤差の測定方法。
【請求項5】
前記関係式を求めるためのステップを備え、
当該ステップでは、
前記鋼管の頭部にカメラ及び前記傾斜計を設置して前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第1ステップと、
前記カメラ及び前記傾斜計を前記カメラを中心として鉛直軸周りに180°回転させて、前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第2ステップと、
前記第1ステップ及び前記第2ステップで抽出された前記指標の位置座標の平均値を算出する第3ステップと、
前記第3ステップで算出した前記平均値に基づいて前記第1ステップにおける前記傾斜角度を算出する第4ステップと、
を複数回実施して前記傾斜計の計測値と前記傾斜角度との線型方程式を求める請求項4に記載の鋼管の建入れ誤差の測定方法。
【請求項6】
地盤に逆打ち支柱を建入れる方法であって、
頭部にカメラ及び傾斜計を設置し、内部に指標を設けた前記逆打ち支柱を地盤に建入れ、前記カメラで前記指標を撮影するステップと、
前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、
前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、
抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、
補正した前記指標の位置に基づいて、前記逆打ち支柱の建入れ誤差を算出するステップと、
算出した前記建入れ誤差が減少するように前記逆打ち支柱の建入れ姿勢を修正するステップと、
を備える逆打ち支柱の建入れ方法。
【請求項1】
地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けられた指標の位置に基づいて測定するシステムであって、
前記鋼管の頭部に、前記指標を撮影するように設置されたカメラと、
前記鋼管の頭部に設置された傾斜計と、
前記カメラの撮像情報に基づいて前記指標の位置を抽出する指標位置抽出部と、
前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出し、前記指標位置抽出部が抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正する指標位置補正部と、
を備える鋼管の建入れ誤差の測定システム。
【請求項2】
前記指標位置補正部は、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出する請求項1に記載の鋼管の建入れ誤差の測定システム。
【請求項3】
地盤に建入れられた鋼管の建入れ誤差を、前記鋼管の内部に設けた指標の位置に基づいて測定する方法であって、
前記鋼管の頭部にカメラ及び傾斜計を設置して前記カメラで前記指標を撮影するステップと、
前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、
前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、
抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、
を備える鋼管の建入れ誤差の測定方法。
【請求項4】
前記傾斜角度を算出するステップでは、前記傾斜計の計測値と前記傾斜角度との関係を示す関係式から、前記傾斜計の計測値に対応する前記傾斜角度を算出する請求項3に記載の鋼管の建入れ誤差の測定方法。
【請求項5】
前記関係式を求めるためのステップを備え、
当該ステップでは、
前記鋼管の頭部にカメラ及び前記傾斜計を設置して前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第1ステップと、
前記カメラ及び前記傾斜計を前記カメラを中心として鉛直軸周りに180°回転させて、前記カメラで前記指標を撮影し、前記カメラの撮像情報に基づいて前記指標の位置座標を抽出する第2ステップと、
前記第1ステップ及び前記第2ステップで抽出された前記指標の位置座標の平均値を算出する第3ステップと、
前記第3ステップで算出した前記平均値に基づいて前記第1ステップにおける前記傾斜角度を算出する第4ステップと、
を複数回実施して前記傾斜計の計測値と前記傾斜角度との線型方程式を求める請求項4に記載の鋼管の建入れ誤差の測定方法。
【請求項6】
地盤に逆打ち支柱を建入れる方法であって、
頭部にカメラ及び傾斜計を設置し、内部に指標を設けた前記逆打ち支柱を地盤に建入れ、前記カメラで前記指標を撮影するステップと、
前記カメラの撮像情報に基づいて前記指標の位置を抽出するステップと、
前記傾斜計の計測値に基づいて前記カメラの光軸の鉛直軸に対する傾斜角度を算出するステップと、
抽出した前記指標の位置を、算出した前記傾斜角度に基づいて補正するステップと、
補正した前記指標の位置に基づいて、前記逆打ち支柱の建入れ誤差を算出するステップと、
算出した前記建入れ誤差が減少するように前記逆打ち支柱の建入れ姿勢を修正するステップと、
を備える逆打ち支柱の建入れ方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−92463(P2013−92463A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235244(P2011−235244)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
[ Back to top ]