
電動シート用制御装置
【課題】本発明は、電動シート用制御装置に係り、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することにある。
【解決手段】シートの形状又は位置を可変するために設けられた複数のモータと、モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、上記のPWM駆動手段によるモータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とする。
【解決手段】シートの形状又は位置を可変するために設けられた複数のモータと、モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、上記のPWM駆動手段によるモータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動シート用制御装置に係り、特に、シートの形状又は位置を可変するために設けられた複数のモータをそれぞれPWM駆動しつつ、各モータの起動時又は停止時にモータ速度を徐々に変化させる速度制御を実行するのに好適な電動シート用制御装置に関する。
【背景技術】
【0002】
シートの形状や位置を可変させるモータとしては、シートを前後方向にスライドさせるためのモータやシートをリクライニングさせるためのモータ,シートを上下方向にリフトさせるためのモータ,シートバック部を中折れにするためのモータ,シートバック部のサイドサポート部を傾動させるためのモータなどがある。これらの各シート用モータは、着座する人を支えながら作動することが必要である。この点、着座者への不安感を解消させて快適性を確保するためには、モータの起動時や停止時にそのモータ起動や停止に伴って着座者に伝達されるショックを低減することが求められる。
【0003】
従来、シート用のモータをPWM(Pulse Width Modulation)駆動する電動シート用制御装置が知られている(例えば、特許文献1参照)。この制御装置は、モータの起動時にはモータの速度を所望の速度まで徐々に上昇させると共に、モータの停止時にはモータの速度をゼロまで徐々に低下させる速度制御を実行する。かかる速度制御が行われれば、モータの起動や停止が短時間で急激に行われることは回避される。従って、上記の制御装置によれば、モータの起動時及び停止時に着座者へのショックを低減することが可能となる。
【0004】
また、シートの形状や位置を可変させるモータとしては、上記の如く、複数の種類のモータがある。各シート用モータはそれぞれ、着座する人を支えながら駆動することが必要であるので、これらの各シート用モータを駆動させるためには、大きさ作動電流を流して高トルクを発生させることが必要である。更に、シート用モータは、車両エンジンが駆動されていない車両停止時に駆動される機会が多い。この点、車両停止中に複数のシート用モータを同時に駆動させようとすると、車載バッテリから過大な電流を流すことが必要となるので、かかる事態を回避するため、複数のシート用モータを駆動させるときは各シート用モータの駆動が一つずつ時間をずらして行われることがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平4−237645号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、起動時及び停止時に上記の速度制御が実行される各シート用モータの駆動が一つずつ時間をずらして行われる場合において、一のシート用モータの停止時にその速度が完全にゼロになった後に次のシート用モータの速度がゼロから上昇し始めるものとすると、駆動すべきすべてのシート用モータのうち最初のシート用モータの駆動が開始されてから最後のシート用モータの駆動が完了するまでに多くの時間を費やしてしまう。また、各シート用モータはPWM駆動されるので、各シート用モータが起動され或いは停止されるときにそれぞれの速度制御タイミングにおいてPWMノイズが発生して車両ノイズとして外部に放出されてしまう。
【0007】
本発明は、上述の点に鑑みてなされたものであり、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することが可能な電動シート用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的は、シートの形状又は位置を可変するために設けられた複数のモータと、前記モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、前記PWM駆動手段による前記モータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とする電動シート用制御装置により達成される。
【発明の効果】
【0009】
本発明によれば、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施例である電動シート用制御装置の構成図である。
【図2】本実施例の電動シート用制御装置において3つのモータが時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートである。
【図3】本実施例の電動シート用制御装置において2つのモータがそれぞれ速度制御されるときの制御部から該2つのモータへのPWM出力を表した図である。
【図4】本実施例と対比される対比例の電動シート用制御装置において3つのモータが時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートである。
【図5】本実施例と対比される対比例の電動シート用制御装置においてPWMノイズが発生する仕組みを表した図である。
【図6】本発明の変形例の電動シート用制御装置の構成図である。
【発明を実施するための形態】
【0011】
以下、図面を用いて、本発明に係る電動シート用制御装置の具体的な実施の形態について説明する。
【0012】
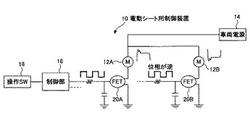
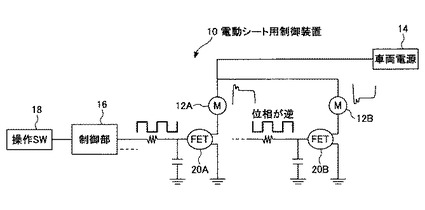
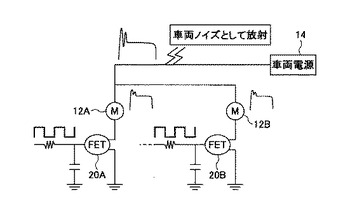
図1は、本発明の一実施例である電動シート用制御装置10の構成図を示す。本実施例の電動シート用制御装置10は、例えば車両に搭載されるシートの形状や位置を可変するために設けられた複数のモータ12(図1においては、2つのモータ12A,12Bが示されている。)を制御する装置である。
【0013】
モータ12としては、シートを前後方向にスライドさせるためのモータやシートをリクライニングさせるためのモータ,シートを上下方向にリフトさせるためのモータ,シートバック部を中折れにするためのモータ,シートバック部のサイドサポート部を傾動させるためのモータなど複数のモータがある。各モータ12はそれぞれ、シートの形状又は位置を可変するためのトルクを発生する。各モータ12のシャフトは、減速機を介してシート側の可動部に噛合されている。モータ12の発生したトルクは、減速機を介してシート側の可動部に伝達される。
【0014】
モータ12には、車両電源14が電気的に接続されている。車両電源14は、直流電源であって、車両のイグニションオフ時にもシートの形状や位置が可変されるように例えば車載バッテリである。各モータ12はそれぞれ、車両電源14からの電力供給がなされることにより駆動し、上記のトルクを発生する。また、各モータ12はそれぞれ、流れる電流の方向が切り換わることにより駆動の方向が切り換え可能となるように構成されている。
【0015】
電動シート用制御装置10は、マイクロコンピュータを主体に構成される制御部16を備えている。制御部16には、シートの形状や位置を可変するために車両乗員に操作される操作スイッチ18が電気的に接続されている。操作スイッチ18は、モータ12ごとに対応して設けられている。制御部16は、車両乗員による操作スイッチ18の操作に従って対応のモータ12を起動させ或いは停止させる。尚、制御部16は、車両乗員による所定のスイッチ操作に従って、メモリに格納されているシート形状やシート位置の状態が実現されるようにモータ12を起動させ或いは停止させるものであってもよい。
【0016】
制御部16は、各モータ12それぞれに対して、車両電源14からの電力供給のオン・オフのデューティ比が可変できるようにPWM駆動を行う。各モータ12はそれぞれ、制御部16からの指示に従ってPWM駆動される。また、制御部16は、モータ12の起動時及び停止時において、PWM駆動におけるデューティ比を徐々に変化させることによりモータ12の速度を徐々に変化させる速度制御を実行する。各モータ12はそれぞれ、PWM駆動におけるデューティ比が可変されることにより速度変化される。
【0017】
電動シート用制御装置10は、また、モータ12の駆動を制御するスイッチング素子20を備えている。スイッチング素子20は、半導体素子としてのMOS−FETである。スイッチング素子20は、モータ12ごとに設けられている(図1においては、モータ12Aに対応するスイッチング素子20Aと、モータ12Bに対応するスイッチング素子20Bと、が示されている。)。
【0018】
各スイッチング素子20はそれぞれ、ソース端子が接地されかつドレイン端子がモータ12に接続された構成を有している。スイッチング素子20のゲート端子には、上記の制御部16が電気的に接続されている。制御部16は、スイッチング素子20のオン・オフを制御することによりモータ12をPWM駆動させる。モータ12は、スイッチング素子20がオンしたときに車両電源14から電力供給されることで駆動され、また、スイッチング素子20がオフしたときに車両電源14からの電力供給が停止されることで駆動停止される。
【0019】
次に、図2及び図3を用いて、本実施例の電動シート用制御装置10の動作について説明する。
【0020】
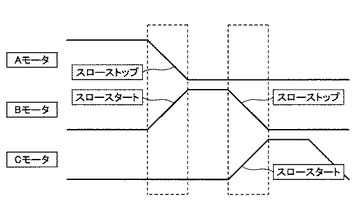
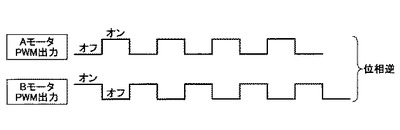
図2は、本実施例の電動シート用制御装置10において3つのモータ12(尚、図2及び図3においては、Aモータ,Bモータ,Cモータ)が時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートを示す。また、図3は、本実施例の電動シート用制御装置10において2つのモータ12(Aモータ,Bモータ)がそれぞれ速度制御されるときの制御部16から該2つのモータ12へのPWM出力を表した図を示す。尚、図4は、本実施例と対比される対比例の電動シート用制御装置において3つのモータ12が時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートを示す。また、図5は、本実施例と対比される対比例の電動シート用制御装置においてPWMノイズが発生する仕組みを表した図を示す。
【0021】
本実施例において、制御部16は、複数のモータ12を駆動すべきとき、それら駆動すべきモータのうち2つ以上のモータ12が同時に車両電源14から電力供給されて駆動されることの無いように、すなわち、それら駆動すべき各モータ12が一つずつ車両電源14から電力供給されて各モータ12の駆動が一つずつ時間をずらして行われるように、駆動制御を行う。かかる複数のモータ12が駆動される場合の駆動制御によれば、車両エンジンが駆動されていない車両停止時において車両電源14から同時に2つ以上のモータ12を駆動させるための過大な電流が流れるのは回避される。このため、車両電源14から過大な電流が流れ得ることを前提としたシステム設計は不要であり、シートの形状や位置を可変するシステムの簡素化を図ることが可能である。
【0022】
また、制御部16は、モータ12の起動時には速度制御として速度を所望の速度まで徐々に上昇させるスロースタート制御を実行すると共に、モータ12の停止時には速度制御として速度をゼロまで徐々に低下させるスローストップ制御を実行する。スロースタート制御において、モータ12の速度がゼロから所望の速度まで上昇するのに要する時間(以下、速度上昇時間と称す。)は予め定められていると共に、スローストップ制御において、モータ12の速度が所望の速度からゼロまで低下するのに要する時間(以下、速度低下時間と称す。)は予め定められている。更に、速度上昇時間と速度低下時間とは同じ或いは略同じである。
【0023】
更に、制御部16は、複数のモータ12を駆動するとき、上記の如く、それら駆動すべき各モータ12が一つずつ車両電源14から電力供給されて各モータ12の駆動が一つずつ時間をずらして行われるように駆動制御を行うが、この駆動制御の実行時、図2に示す如く、時間的に連続して駆動される2つのモータ12に対する互いの速度制御のタイミングを一致させる。
【0024】
具体的には、時間的に連続して駆動される2つのモータ12について、停止動作がなされるモータ12のスローストップ制御が開始されるタイミングと、起動動作がなされるモータ12のスロースタート制御が開始されるタイミングと、を互いに一致させると共に、その停止動作がなされるモータ12のスローストップ制御が終了されるタイミングと、起動動作がなされるモータ12のスロースタート制御が終了されるタイミングと、を互いに一致させる。例えば、図2に示す如くモータ12がAモータ,Bモータ,Cモータの順番に駆動されるとき、Aモータのスローストップ制御のタイミングとBモータのスロースタート制御のタイミングとを一致させ、かつ、Bモータのスローストップ制御のタイミングとCモータのスロースタート制御のタイミングとを一致させる。
【0025】
かかる制御処理においては、時間的に連続して駆動される2つのモータ12のうち、停止動作がなされるモータ12のスローストップ制御が実行されるタイミングと、起動動作がなされるモータ12のスロースタート制御が実行されるタイミングと、が互いに重なり合う。このため、本実施例の構成によれば、時間的に連続して駆動される2つのモータ12について、停止動作がなされるモータ12のスローストップ制御が終了された後すなわちそのモータ12の速度がスローストップ制御により完全にゼロになった後に、起動動作がなされるモータ12のスロースタート制御が開始されることすなわちそのモータ12の速度がゼロから上昇し始める対比構成(図4に示す制御処理)に比べて、複数のモータ12が駆動されるときにそれら駆動すべきすべてのモータ12のうち最初に駆動されるモータ12の駆動が開始されてから最後に駆動されるモータ12の駆動が完了するまでの時間を短縮させることができる。
【0026】
また、制御部16は、上記の如く時間的に連続して駆動される2つのモータ12に対する互いの速度制御のタイミングを一致させて、それら2つの速度制御(すなわち、スローストップ制御とスロースタート制御との二つ)を実行する際、それら2つのモータ12をPWM駆動するうえでの位相を互いに逆相とする。例えば、図3に示す如く、Aモータの速度制御のタイミングとBモータの速度制御のタイミングとが一致される場合は、AモータをPWM駆動するためのスイッチング素子20へのPWM出力のオフタイミングとBモータをPWM駆動するためのスイッチング素子20へのPWM出力のオンタイミングとを一致させ、かつ、AモータをPWM駆動するためのスイッチング素子20へのPWM出力のオンタイミングとBモータをPWM駆動するためのスイッチング素子20へのPWM出力のオフタイミングとを一致させる。
【0027】
かかる制御処理においては、時間的に連続して駆動される2つのモータ12のうち一方のモータ12に対応するスイッチング素子20のオフからオンへの立ち上がりと他方のモータ12に対応するスイッチング素子20のオンからオフへの立ち下がりとが略同タイミングで行われるので、時間的に連続して駆動される2つのモータ12が同じタイミングで速度制御される状況において、それぞれ2つのモータ12の速度制御により発生するPWMノイズが互いに打ち消しあう。
【0028】
このため、本実施例の構成によれば、時間的に連続して駆動される2つのモータ12が起動時又は停止時に同じタイミングで速度制御されるとき、すなわち、それら2つのモータ12のうち起動されるモータ12に対するスロースタート制御と停止されるモータ12に対するスローストップ制御とが同タイミングで実行されるとき、それら2つのモータ12をPWM駆動するうえでの位相を互いに同相とする対比構成(図5に示す構成)と異なり、各モータ12の速度制御により発生するPWMノイズが増幅されて車両ノイズとして外部に放出されるのを回避することができる。
【0029】
従って、本実施例の電動シート用制御装置10によれば、複数のモータ12が駆動されるとき、それら駆動すべきすべてのモータ12の全作動時間を短縮させつつ、モータ12の起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することができる。このため、本実施例によれば、シートの形状や位置の複数個所を可変するのに要する時間を短縮させつつ、その可変時に発生するノイズを低減することができるので、シートの商品性を向上させることが可能である。
【0030】
ところで、上記の実施例においては、制御部16が、モータ12ごとにPWM駆動を行うことにより特許請求の範囲に記載した「PWM駆動手段」が、モータ12の起動時及び停止時に速度制御(スローストップ制御又はスロースタート制御)を実行することにより特許請求の範囲に記載した「速度制御手段」が、それぞれ実現されている。
【0031】
また、上記の実施例においては、複数のモータ12が駆動されるときにそれら駆動すべき各モータ12を一つずつ車両電源14から電力供給して各モータ12の駆動を一つずつ時間をずらして行うこととしたが、本発明はこれに限定されるものではなく、駆動すべき各モータ12を二つずつ或いはそれを超える数ずつ車両電源14から電力供給して各モータ12の駆動を二つずつ或いはそれを超える数ずつ時間をずらして行うこととしてもよい。この場合は、二つ以上のモータ12についてスローストップ制御が同時に実行されると共に、二つ以上のモータ12についてスロースタート制御が同時に実行されることとなるが、二つ以上のモータ12に対するスローストップ制御のタイミングと、それらスローストップ制御が行われるモータ12の数と同数の別の二つ以上のモータ12に対するスロースタート制御のタイミングと、を互いに一致させることとすればよく、また、スローストップ制御が実行される二つ以上のモータ12をそれぞれPWM駆動するうえでの位相と、スロースタート制御が実行される、それらスローストップ制御が行われるモータ12の数と同数の別の二つ以上のモータ12をそれぞれPWM駆動するうえでの位相と、を互いに逆相とすることとすればよい。
【0032】
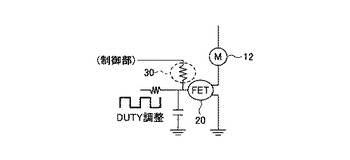
また、上記の実施例においては、モータ12をPWM駆動するうえで温度に応じてデューティ比を調整することは実施していないが、その実施を施すこととしてもよい。すなわち、図6に示す如くオン抵抗の温度電圧特性やゲート容量の温度電圧特性が予め特定されたスイッチング素子20の近傍にサーミスタなどの温度測定センサ30を配置したうえで、その温度測定センサ30に基づくスイッチング素子20の温度とゲート容量との特性を測定して、PWM駆動時におけるスイッチング素子20のデューティ比を微調整してPWMノイズが打ち消しあうように制御を実施することとしてもよい。
【0033】
更に、上記の実施例においては、車両に搭載されるシートの形状や位置を可変するシステムを用いることとしたが、本発明はこれに限定されるものではなく、車両以外の航空機や鉄道車両などに搭載されるシートの形状や位置を可変するシステムに適用することとしてもよい。
【符号の説明】
【0034】
10 電動シート用制御装置
12 モータ
14 車両電源
16 制御部
20 スイッチング素子
【技術分野】
【0001】
本発明は、電動シート用制御装置に係り、特に、シートの形状又は位置を可変するために設けられた複数のモータをそれぞれPWM駆動しつつ、各モータの起動時又は停止時にモータ速度を徐々に変化させる速度制御を実行するのに好適な電動シート用制御装置に関する。
【背景技術】
【0002】
シートの形状や位置を可変させるモータとしては、シートを前後方向にスライドさせるためのモータやシートをリクライニングさせるためのモータ,シートを上下方向にリフトさせるためのモータ,シートバック部を中折れにするためのモータ,シートバック部のサイドサポート部を傾動させるためのモータなどがある。これらの各シート用モータは、着座する人を支えながら作動することが必要である。この点、着座者への不安感を解消させて快適性を確保するためには、モータの起動時や停止時にそのモータ起動や停止に伴って着座者に伝達されるショックを低減することが求められる。
【0003】
従来、シート用のモータをPWM(Pulse Width Modulation)駆動する電動シート用制御装置が知られている(例えば、特許文献1参照)。この制御装置は、モータの起動時にはモータの速度を所望の速度まで徐々に上昇させると共に、モータの停止時にはモータの速度をゼロまで徐々に低下させる速度制御を実行する。かかる速度制御が行われれば、モータの起動や停止が短時間で急激に行われることは回避される。従って、上記の制御装置によれば、モータの起動時及び停止時に着座者へのショックを低減することが可能となる。
【0004】
また、シートの形状や位置を可変させるモータとしては、上記の如く、複数の種類のモータがある。各シート用モータはそれぞれ、着座する人を支えながら駆動することが必要であるので、これらの各シート用モータを駆動させるためには、大きさ作動電流を流して高トルクを発生させることが必要である。更に、シート用モータは、車両エンジンが駆動されていない車両停止時に駆動される機会が多い。この点、車両停止中に複数のシート用モータを同時に駆動させようとすると、車載バッテリから過大な電流を流すことが必要となるので、かかる事態を回避するため、複数のシート用モータを駆動させるときは各シート用モータの駆動が一つずつ時間をずらして行われることがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平4−237645号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、起動時及び停止時に上記の速度制御が実行される各シート用モータの駆動が一つずつ時間をずらして行われる場合において、一のシート用モータの停止時にその速度が完全にゼロになった後に次のシート用モータの速度がゼロから上昇し始めるものとすると、駆動すべきすべてのシート用モータのうち最初のシート用モータの駆動が開始されてから最後のシート用モータの駆動が完了するまでに多くの時間を費やしてしまう。また、各シート用モータはPWM駆動されるので、各シート用モータが起動され或いは停止されるときにそれぞれの速度制御タイミングにおいてPWMノイズが発生して車両ノイズとして外部に放出されてしまう。
【0007】
本発明は、上述の点に鑑みてなされたものであり、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することが可能な電動シート用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的は、シートの形状又は位置を可変するために設けられた複数のモータと、前記モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、前記PWM駆動手段による前記モータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とする電動シート用制御装置により達成される。
【発明の効果】
【0009】
本発明によれば、駆動すべきすべてのモータの全作動時間を短縮させつつ、モータの起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施例である電動シート用制御装置の構成図である。
【図2】本実施例の電動シート用制御装置において3つのモータが時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートである。
【図3】本実施例の電動シート用制御装置において2つのモータがそれぞれ速度制御されるときの制御部から該2つのモータへのPWM出力を表した図である。
【図4】本実施例と対比される対比例の電動シート用制御装置において3つのモータが時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートである。
【図5】本実施例と対比される対比例の電動シート用制御装置においてPWMノイズが発生する仕組みを表した図である。
【図6】本発明の変形例の電動シート用制御装置の構成図である。
【発明を実施するための形態】
【0011】
以下、図面を用いて、本発明に係る電動シート用制御装置の具体的な実施の形態について説明する。
【0012】
図1は、本発明の一実施例である電動シート用制御装置10の構成図を示す。本実施例の電動シート用制御装置10は、例えば車両に搭載されるシートの形状や位置を可変するために設けられた複数のモータ12(図1においては、2つのモータ12A,12Bが示されている。)を制御する装置である。
【0013】
モータ12としては、シートを前後方向にスライドさせるためのモータやシートをリクライニングさせるためのモータ,シートを上下方向にリフトさせるためのモータ,シートバック部を中折れにするためのモータ,シートバック部のサイドサポート部を傾動させるためのモータなど複数のモータがある。各モータ12はそれぞれ、シートの形状又は位置を可変するためのトルクを発生する。各モータ12のシャフトは、減速機を介してシート側の可動部に噛合されている。モータ12の発生したトルクは、減速機を介してシート側の可動部に伝達される。
【0014】
モータ12には、車両電源14が電気的に接続されている。車両電源14は、直流電源であって、車両のイグニションオフ時にもシートの形状や位置が可変されるように例えば車載バッテリである。各モータ12はそれぞれ、車両電源14からの電力供給がなされることにより駆動し、上記のトルクを発生する。また、各モータ12はそれぞれ、流れる電流の方向が切り換わることにより駆動の方向が切り換え可能となるように構成されている。
【0015】
電動シート用制御装置10は、マイクロコンピュータを主体に構成される制御部16を備えている。制御部16には、シートの形状や位置を可変するために車両乗員に操作される操作スイッチ18が電気的に接続されている。操作スイッチ18は、モータ12ごとに対応して設けられている。制御部16は、車両乗員による操作スイッチ18の操作に従って対応のモータ12を起動させ或いは停止させる。尚、制御部16は、車両乗員による所定のスイッチ操作に従って、メモリに格納されているシート形状やシート位置の状態が実現されるようにモータ12を起動させ或いは停止させるものであってもよい。
【0016】
制御部16は、各モータ12それぞれに対して、車両電源14からの電力供給のオン・オフのデューティ比が可変できるようにPWM駆動を行う。各モータ12はそれぞれ、制御部16からの指示に従ってPWM駆動される。また、制御部16は、モータ12の起動時及び停止時において、PWM駆動におけるデューティ比を徐々に変化させることによりモータ12の速度を徐々に変化させる速度制御を実行する。各モータ12はそれぞれ、PWM駆動におけるデューティ比が可変されることにより速度変化される。
【0017】
電動シート用制御装置10は、また、モータ12の駆動を制御するスイッチング素子20を備えている。スイッチング素子20は、半導体素子としてのMOS−FETである。スイッチング素子20は、モータ12ごとに設けられている(図1においては、モータ12Aに対応するスイッチング素子20Aと、モータ12Bに対応するスイッチング素子20Bと、が示されている。)。
【0018】
各スイッチング素子20はそれぞれ、ソース端子が接地されかつドレイン端子がモータ12に接続された構成を有している。スイッチング素子20のゲート端子には、上記の制御部16が電気的に接続されている。制御部16は、スイッチング素子20のオン・オフを制御することによりモータ12をPWM駆動させる。モータ12は、スイッチング素子20がオンしたときに車両電源14から電力供給されることで駆動され、また、スイッチング素子20がオフしたときに車両電源14からの電力供給が停止されることで駆動停止される。
【0019】
次に、図2及び図3を用いて、本実施例の電動シート用制御装置10の動作について説明する。
【0020】
図2は、本実施例の電動シート用制御装置10において3つのモータ12(尚、図2及び図3においては、Aモータ,Bモータ,Cモータ)が時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートを示す。また、図3は、本実施例の電動シート用制御装置10において2つのモータ12(Aモータ,Bモータ)がそれぞれ速度制御されるときの制御部16から該2つのモータ12へのPWM出力を表した図を示す。尚、図4は、本実施例と対比される対比例の電動シート用制御装置において3つのモータ12が時間的に連続して駆動される場合に実現されるモータ動作のタイムチャートを示す。また、図5は、本実施例と対比される対比例の電動シート用制御装置においてPWMノイズが発生する仕組みを表した図を示す。
【0021】
本実施例において、制御部16は、複数のモータ12を駆動すべきとき、それら駆動すべきモータのうち2つ以上のモータ12が同時に車両電源14から電力供給されて駆動されることの無いように、すなわち、それら駆動すべき各モータ12が一つずつ車両電源14から電力供給されて各モータ12の駆動が一つずつ時間をずらして行われるように、駆動制御を行う。かかる複数のモータ12が駆動される場合の駆動制御によれば、車両エンジンが駆動されていない車両停止時において車両電源14から同時に2つ以上のモータ12を駆動させるための過大な電流が流れるのは回避される。このため、車両電源14から過大な電流が流れ得ることを前提としたシステム設計は不要であり、シートの形状や位置を可変するシステムの簡素化を図ることが可能である。
【0022】
また、制御部16は、モータ12の起動時には速度制御として速度を所望の速度まで徐々に上昇させるスロースタート制御を実行すると共に、モータ12の停止時には速度制御として速度をゼロまで徐々に低下させるスローストップ制御を実行する。スロースタート制御において、モータ12の速度がゼロから所望の速度まで上昇するのに要する時間(以下、速度上昇時間と称す。)は予め定められていると共に、スローストップ制御において、モータ12の速度が所望の速度からゼロまで低下するのに要する時間(以下、速度低下時間と称す。)は予め定められている。更に、速度上昇時間と速度低下時間とは同じ或いは略同じである。
【0023】
更に、制御部16は、複数のモータ12を駆動するとき、上記の如く、それら駆動すべき各モータ12が一つずつ車両電源14から電力供給されて各モータ12の駆動が一つずつ時間をずらして行われるように駆動制御を行うが、この駆動制御の実行時、図2に示す如く、時間的に連続して駆動される2つのモータ12に対する互いの速度制御のタイミングを一致させる。
【0024】
具体的には、時間的に連続して駆動される2つのモータ12について、停止動作がなされるモータ12のスローストップ制御が開始されるタイミングと、起動動作がなされるモータ12のスロースタート制御が開始されるタイミングと、を互いに一致させると共に、その停止動作がなされるモータ12のスローストップ制御が終了されるタイミングと、起動動作がなされるモータ12のスロースタート制御が終了されるタイミングと、を互いに一致させる。例えば、図2に示す如くモータ12がAモータ,Bモータ,Cモータの順番に駆動されるとき、Aモータのスローストップ制御のタイミングとBモータのスロースタート制御のタイミングとを一致させ、かつ、Bモータのスローストップ制御のタイミングとCモータのスロースタート制御のタイミングとを一致させる。
【0025】
かかる制御処理においては、時間的に連続して駆動される2つのモータ12のうち、停止動作がなされるモータ12のスローストップ制御が実行されるタイミングと、起動動作がなされるモータ12のスロースタート制御が実行されるタイミングと、が互いに重なり合う。このため、本実施例の構成によれば、時間的に連続して駆動される2つのモータ12について、停止動作がなされるモータ12のスローストップ制御が終了された後すなわちそのモータ12の速度がスローストップ制御により完全にゼロになった後に、起動動作がなされるモータ12のスロースタート制御が開始されることすなわちそのモータ12の速度がゼロから上昇し始める対比構成(図4に示す制御処理)に比べて、複数のモータ12が駆動されるときにそれら駆動すべきすべてのモータ12のうち最初に駆動されるモータ12の駆動が開始されてから最後に駆動されるモータ12の駆動が完了するまでの時間を短縮させることができる。
【0026】
また、制御部16は、上記の如く時間的に連続して駆動される2つのモータ12に対する互いの速度制御のタイミングを一致させて、それら2つの速度制御(すなわち、スローストップ制御とスロースタート制御との二つ)を実行する際、それら2つのモータ12をPWM駆動するうえでの位相を互いに逆相とする。例えば、図3に示す如く、Aモータの速度制御のタイミングとBモータの速度制御のタイミングとが一致される場合は、AモータをPWM駆動するためのスイッチング素子20へのPWM出力のオフタイミングとBモータをPWM駆動するためのスイッチング素子20へのPWM出力のオンタイミングとを一致させ、かつ、AモータをPWM駆動するためのスイッチング素子20へのPWM出力のオンタイミングとBモータをPWM駆動するためのスイッチング素子20へのPWM出力のオフタイミングとを一致させる。
【0027】
かかる制御処理においては、時間的に連続して駆動される2つのモータ12のうち一方のモータ12に対応するスイッチング素子20のオフからオンへの立ち上がりと他方のモータ12に対応するスイッチング素子20のオンからオフへの立ち下がりとが略同タイミングで行われるので、時間的に連続して駆動される2つのモータ12が同じタイミングで速度制御される状況において、それぞれ2つのモータ12の速度制御により発生するPWMノイズが互いに打ち消しあう。
【0028】
このため、本実施例の構成によれば、時間的に連続して駆動される2つのモータ12が起動時又は停止時に同じタイミングで速度制御されるとき、すなわち、それら2つのモータ12のうち起動されるモータ12に対するスロースタート制御と停止されるモータ12に対するスローストップ制御とが同タイミングで実行されるとき、それら2つのモータ12をPWM駆動するうえでの位相を互いに同相とする対比構成(図5に示す構成)と異なり、各モータ12の速度制御により発生するPWMノイズが増幅されて車両ノイズとして外部に放出されるのを回避することができる。
【0029】
従って、本実施例の電動シート用制御装置10によれば、複数のモータ12が駆動されるとき、それら駆動すべきすべてのモータ12の全作動時間を短縮させつつ、モータ12の起動時又は停止時に発生するPWMノイズが車両ノイズとして外部に放出されるのを抑制することができる。このため、本実施例によれば、シートの形状や位置の複数個所を可変するのに要する時間を短縮させつつ、その可変時に発生するノイズを低減することができるので、シートの商品性を向上させることが可能である。
【0030】
ところで、上記の実施例においては、制御部16が、モータ12ごとにPWM駆動を行うことにより特許請求の範囲に記載した「PWM駆動手段」が、モータ12の起動時及び停止時に速度制御(スローストップ制御又はスロースタート制御)を実行することにより特許請求の範囲に記載した「速度制御手段」が、それぞれ実現されている。
【0031】
また、上記の実施例においては、複数のモータ12が駆動されるときにそれら駆動すべき各モータ12を一つずつ車両電源14から電力供給して各モータ12の駆動を一つずつ時間をずらして行うこととしたが、本発明はこれに限定されるものではなく、駆動すべき各モータ12を二つずつ或いはそれを超える数ずつ車両電源14から電力供給して各モータ12の駆動を二つずつ或いはそれを超える数ずつ時間をずらして行うこととしてもよい。この場合は、二つ以上のモータ12についてスローストップ制御が同時に実行されると共に、二つ以上のモータ12についてスロースタート制御が同時に実行されることとなるが、二つ以上のモータ12に対するスローストップ制御のタイミングと、それらスローストップ制御が行われるモータ12の数と同数の別の二つ以上のモータ12に対するスロースタート制御のタイミングと、を互いに一致させることとすればよく、また、スローストップ制御が実行される二つ以上のモータ12をそれぞれPWM駆動するうえでの位相と、スロースタート制御が実行される、それらスローストップ制御が行われるモータ12の数と同数の別の二つ以上のモータ12をそれぞれPWM駆動するうえでの位相と、を互いに逆相とすることとすればよい。
【0032】
また、上記の実施例においては、モータ12をPWM駆動するうえで温度に応じてデューティ比を調整することは実施していないが、その実施を施すこととしてもよい。すなわち、図6に示す如くオン抵抗の温度電圧特性やゲート容量の温度電圧特性が予め特定されたスイッチング素子20の近傍にサーミスタなどの温度測定センサ30を配置したうえで、その温度測定センサ30に基づくスイッチング素子20の温度とゲート容量との特性を測定して、PWM駆動時におけるスイッチング素子20のデューティ比を微調整してPWMノイズが打ち消しあうように制御を実施することとしてもよい。
【0033】
更に、上記の実施例においては、車両に搭載されるシートの形状や位置を可変するシステムを用いることとしたが、本発明はこれに限定されるものではなく、車両以外の航空機や鉄道車両などに搭載されるシートの形状や位置を可変するシステムに適用することとしてもよい。
【符号の説明】
【0034】
10 電動シート用制御装置
12 モータ
14 車両電源
16 制御部
20 スイッチング素子
【特許請求の範囲】
【請求項1】
シートの形状又は位置を可変するために設けられた複数のモータと、
前記モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、
前記PWM駆動手段による前記モータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、
少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とすることを特徴とする電動シート用制御装置。
【請求項1】
シートの形状又は位置を可変するために設けられた複数のモータと、
前記モータごとに設けられ、該モータをPWM駆動するPWM駆動手段と、
前記PWM駆動手段による前記モータの起動時及び停止時に該モータの速度を徐々に変化させる速度制御を実行する速度制御手段と、を備え、
少なくとも一の前記モータの停止時における前記速度制御と他の前記モータの起動時における前記速度制御とが実行される場合、前記速度制御手段は、該2つ以上の前記モータに対する互いの前記速度制御のタイミングを一致させ、かつ、前記PWM駆動手段は、該2つ以上の前記モータをPWM駆動するうえでの位相を互いに逆相とすることを特徴とする電動シート用制御装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−102652(P2013−102652A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−245886(P2011−245886)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]