
電動バキュームポンプ制御装置
【課題】車両の速度が変化する場合においても常に必要なブレーキアシスト力を得られるように電動バキュームポンプを駆動制御すること。
【解決手段】電動バキュームポンプ111は、車両100のブレーキブースタ110内に負圧を発生させる。予測手段131によって、車両100の走行速度の走行速度が所定速度以上になると予測された場合、駆動手段132は、走行速度が所定速度以上となる前に、ブレーキブースタ110内の負圧を高速時負圧値Phとするように電動バキュームポンプ111を駆動させる。このとき、ブレーキブースタ110内の現在負圧値と高速時負圧値Phとの差分に基づいて、電動バキュームポンプ111の必要駆動時間を算出し、走行速度が所定速度となると予測される時刻の必要駆動時間前から電動バキュームポンプ111の駆動を開始する。
【解決手段】電動バキュームポンプ111は、車両100のブレーキブースタ110内に負圧を発生させる。予測手段131によって、車両100の走行速度の走行速度が所定速度以上になると予測された場合、駆動手段132は、走行速度が所定速度以上となる前に、ブレーキブースタ110内の負圧を高速時負圧値Phとするように電動バキュームポンプ111を駆動させる。このとき、ブレーキブースタ110内の現在負圧値と高速時負圧値Phとの差分に基づいて、電動バキュームポンプ111の必要駆動時間を算出し、走行速度が所定速度となると予測される時刻の必要駆動時間前から電動バキュームポンプ111の駆動を開始する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のブレーキブースタ内に負圧を発生させる電動バキュームポンプの駆動を制御する電動バキュームポンプ制御装置に関する。
【背景技術】
【0002】
従来、自動車のブレーキ機構において、ブレーキペダルへの踏み込み力によってブレーキマスターシリンダー内のピストンを駆動する際に、負圧によってピストンの駆動を補助するブレーキブースタ(真空倍力装置)が用いられている。このブレーキブースタ内の負圧は、主に電気自動車などでは、電動バキュームポンプを用いて発生させている(たとえば、下記特許文献1および2参照)。下記特許文献1では、ブレーキブースタが搭載された車両のシフト位置に応じてバキュームポンプの駆動時間を変更する技術が開示されている。また、下記特許文献2では、車両の速度に応じてバキュームタンク内の目標負圧を設定して電動バキュームポンプを駆動する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭62−61868号公報
【特許文献2】特許2864410号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常の電動バキュームパンプは、ブレーキブースタ内の負圧値が所定の閾値以下になると駆動し、目標負圧に到達すると停止するように駆動制御される。しかしながら、車両の速度が高速になるほど高い制動力が必要となるため、ブレーキブースタ内の負圧値を常時一定範囲としたのでは、ブレーキに対するアシスト力を十分活用できないという問題点がある。
【0005】
また、上述した特許文献1および2では、現在の車両速度(またはシフト位置)に基づいて電動バキュームポンプで発生させる負圧を設定(高速になるほど大きい負圧を発生させるように設定)しているものの、バキュームタンク内の負圧値が所望の値となるまでには、電動バキュームポンプの駆動を開始してから所定の時間が必要となる。このため、車両速度が高速となり、電動バキュームポンプの駆動を開始した直後にブレーキ操作をおこなった場合などは、必要なアシスト力を得られない可能性があるという問題点がある。
【0006】
本発明は、上述した従来技術の問題点を鑑みてなされたものであり、車両の速度が変化する場合においても常に必要なブレーキアシスト力を得られるように電動バキュームポンプを駆動制御することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明にかかる電動バキュームポンプ制御装置は、車両のブレーキブースタ内に負圧を発生させる電動バキュームポンプの駆動を制御する電動バキュームポンプ制御装置であって、現在時刻から所定時間内における前記車両の走行速度の変化を予測する予測手段と、前記予測手段によって前記走行速度が前記所定時間内に所定速度以上になると予測された場合、前記走行速度が前記所定速度以上となる前に、前記ブレーキブースタ内の負圧を前記車両の走行速度が所定速度以上となった場合における目標負圧値とするように前記電動バキュームポンプを駆動させる駆動手段と、を備えたことを特徴とする。
【発明の効果】
【0008】
請求項1の発明によれば、所定時間内における車両の走行速度の変化をあらかじめ予測して、所定時間内に所定速度以上になると予測される場合には、走行速度が所定速度となる前にブレーキブースタ内の負圧が目標負圧値となるように電動バキュームポンプを駆動する。これにより、車両の走行速度が所定速度以上となった時点においてブレーキブースタ内の負圧は目標負圧値となっており、当該速度において必要なブレーキアシスト力を確保することができる。
【0009】
請求項2の発明によれば、車両の走行速度が所定速度となると予測される時刻、およびブレーキブースタ内の負圧を目標負圧値にするまでに必要な電動バキュームポンプの駆動時間を算出して、電動バキュームポンプの駆動を開始する。これにより、所定速度となった時点におけるブレーキブースタ内の負圧をより確実に目標負圧値とすることができる。
【0010】
請求項3の発明によれば、電動バキュームポンプの駆動を開始させた後、車両のブレーキペダルが操作されている間は電動バキュームポンプの駆動を継続させるので、加速時のブレーキ操作中における制動力を向上させることができる。
【図面の簡単な説明】
【0011】
【図1】実施の形態にかかる電動バキュームポンプ制御装置を適用した車両100の構成を示す説明図である。
【図2】予測手段131による走行速度の予測方法の一例を示す説明図である。
【図3】電動バキュームポンプ111の必要駆動時間を算出方法の一例を示す説明図である。
【図4】電動バキュームポンプ制御装置による電動バキュームポンプ制御処理の手順を示すフローチャートである。
【図5】予測手段131による車速変化の予測処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下に添付図面を参照して、本発明にかかる電動バキュームポンプ制御装置の好適な実施の形態を詳細に説明する。以下の実施の形態では、電動自動車である車両100に対して、本発明にかかる電動バキュームポンプ制御装置を適用した場合の例について説明する。なお、本明細書において、負圧とは大気圧と比較して低い(大気圧を0とした場合、負となる)圧力状態にあることをいい、「負圧が高い」とは大気圧との圧力差がマイナス方向に大きいことを、「負圧が低い」とは大気圧との圧力差がマイナス方向に小さいことを示すものとする。
【0013】
(実施の形態)
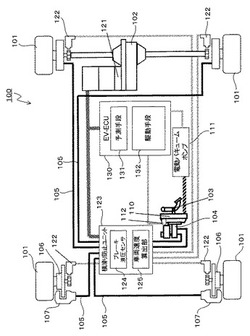
図1は、実施の形態にかかる電動バキュームポンプ制御装置を適用した車両100の構成を示す説明図である。図1においては、車両100に対する電動バキュームポンプ制御装置の適用と関係しない構成については、図示を省略している。車両100は、電気自動車であり、図示しないバッテリーに蓄積された電力によってモーター102を駆動して、タイヤ101を回転させて走行する。
【0014】
タイヤ101の回転は、運転者によるブレーキペダル103の操作によって制動される。運転者によってブレーキペダル103が踏み込まれると、その踏み込み力によってマスターシリンダー104内のピストンが駆動され、マスターシリンダー104内に充填されたブレーキ液が押し出される。押し出されたブレーキ液は、ブレーキ配管105を伝ってブレーキキャリパ107へと伝送される。なお、ブレーキペダル103および図示しないアクセルペダルへの踏み込み力は、ペダルセンサによってそれぞれ計測され、後述するEV−ECU130へと出力される。
【0015】
ブレーキキャリパー107には、ブレーキパッドおよびピストンが設けられている。ブレーキキャリパー107では、ブレーキ液に伝えられた圧力の作用よってピストンが駆動され、ブレーキパッドをディスクローター106へと押し付ける。そして、ディスクローター106とブレーキパッドとの間の摩擦によって、タイヤ101の運動エネルギーが熱エネルギーとして空気中に放出され、タイヤ101の回転が停止し、車両100が停止する。
【0016】
ここで、ブレーキペダル103への踏み込み力がマスターシリンダー104に伝達される際には、ブレーキブースタ110によって踏み込み力を増幅させることによって、車両100の制動に必要な圧力を得る。ブレーキブースタ110の内部は、ブレーキペダル103側およびマスターシリンダー104側の2つの区画に隔てられている。ブレーキペダル103側の区画(以下、「大気圧室」という)は大気圧と同じ圧力状態に保たれる一方、マスターシリンダー104側の区画(以下、「負圧室」という)には負圧が発生され、大気圧よりも低い圧力状態とされる。この2つの区画間の圧力差によって、ブレーキペダル103側からマスターシリンダー104側へと向かう力が発生し、マスターシリンダー104内のピストンを押す力を補助する。
【0017】
ブレーキブースタ110の負圧室内の負圧は、電動バキュームポンプ111によって発生させる。電動バキュームポンプ111は、モーターで駆動されるポンプによって負圧室内の空気を吸い出すことによって、負圧室内の圧力状態を大気圧よりも低くする。ブレーキブースタ110は、後述するEV−ECU130の駆動手段132によって駆動制御される。
【0018】
モーター回転数センサ121は、単位時間あたりのモーター102の回転数を計測する。車輪速度センサ122は、各タイヤ101に設けられ、各タイヤ101の回転速度を計測する。モーター回転数センサ121および車輪速度センサ122で得られた計測値は、それぞれ横滑り防止ユニット123へと出力される。
【0019】
横滑り防止ユニット123は、滑りやすい路面での走行や急なハンドル操作などをおこなった際にも安全に走行できるよう、車両100のブレーキングやモーター出力などを制御する装置である。横滑り防止ユニット123には、ブレーキ油圧センサ124および車両速度算出部125が設けられている。ブレーキ油圧センサ124は、各タイヤ101に伝送されるブレーキ液の油圧を計測する。車両速度算出部125は、モーター回転数センサ121や車輪速度センサ122などを用いて、車両100の走行速度を算出する。
【0020】
EV−ECU130は、CPU、制御プログラムなどを格納・記憶するROM、制御プログラムの作動領域としてのRAM、各種データを書き換え可能に保持するEEPROM、周辺回路等とのインターフェースをとるインターフェース部などを含んで構成される。EV−ECU130は、横滑り防止ユニット123を含む車両100の各部とインターフェース部を介して接続され、それら各部との間で情報の授受をおこない、各部の制御を司る。
【0021】
また、EV−ECU130は、上記CPUが上記制御プログラムを実行することによって、予測手段131および駆動手段132を実現する。すなわち、本実施の形態においては、EV−ECU130のCPUが制御プログラムを実行することによって、電動バキュームポンプ制御装置を実現する。
【0022】
予測手段131は、車両100の走行中において、現在時刻から所定時間内における車両100の走行速度の変化を予測する。
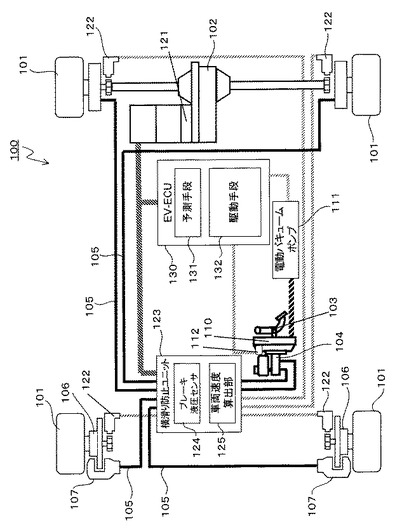
図2は、予測手段131による走行速度の予測方法の一例を示す説明図である。図2は、車両100の走行速度の時間変化を示すグラフであり、縦軸は速度(km/h)、横軸は時刻(s)を示している。予測手段131は、走行中は常時車両100の速度変化を記録している。現在時刻から所定時間T2後までの間(図3では5秒とする)における車両100の速度変化を予測する場合、予測手段131は、現在時刻から時間T1さかのぼった間(図3では3秒とする)の速度変化を、サンプリング時間t1(単位時刻:図3では100ms)ごとに測定する。予測手段131は、サンプリング時間t1ごとの速度の差分から各単位時刻における加速度を推定し、さらに、現在時刻から時間T1さかのぼった間の加速度の平均値を算出する。
【0023】
この平均値から所定時間T2後の速度を予測することにより、車両100の走行速度の変化を予測する。なお、予測手段131は、上述した実測値に加えて、図5に示すように駆動トルクや車両内部に記憶された加速度モデルなどを用いて加速度の予測精度を向上させている。
なお、予測手段131は、所定時間T2後の速度のみならず、現在時時刻から所定時間T2までの各単位時刻における走行速度を予測して、図2に示す速度カーブCを予測する。
また、所定時間T2は、たとえば、ブレーキブースタ110の負圧室の負圧値を、大気圧と同じ圧力値から高速時における目標負圧値(Ph)にするまでに必要な電動バキュームポンプ111の駆動時間以上とする。
【0024】
駆動手段132は、予測手段131によって車両100の走行速度が所定時間内に所定速度(Vp)以上になると予測された場合、走行速度が所定速度以上となる前に、ブレーキブースタ110内の負圧を車両100の走行速度が所定速度以上となった場合における目標負圧値(Ph:高速時負圧値)とするように電動バキュームポンプ111を駆動させる。
【0025】
ここで、駆動手段132は、車両100の走行中は、ブレーキブースタ110内の負圧室の圧力値を、大気圧(P0)より低い圧力値に保つように、電動バキュームポンプ111を駆動させている。このときの圧力値を通常負圧値Pl(Pl<P0)とする。駆動手段132は、負圧室の圧力値が通常負圧値Pl以上になると、電動バキュームポンプ111を駆動させて、負圧室の圧力値が通常負圧値Pl以下となるようにする。
【0026】
一方、車両100の走行速度が高速(所定速度以上)となる場合、その制動には通常走行時より大きな力が必要となる。このため、駆動手段132は、車両100の走行速度が高速(所定速度以上)となる場合には、負圧室の圧力値を通常負圧値Plよりも低い高速時負圧値Ph(Ph<Pl)とする。これは、ブレーキブースタ110内の負圧室の負圧値が高いほど、すなわち、大気圧との圧力差が大きいほど、マスターシリンダー104のピストンに作用する力を大きくすることができ、より大きな制動力を得ることができるためである。
【0027】
このため、駆動手段132は、車両100の走行速度が所定速度以上になると予測された場合、電動バキュームポンプ111を駆動させ、走行速度が所定速度以上となる前に、ブレーキブースタ110内の負圧を高速時負圧値Phとする。このとき、駆動手段132は、ブレーキブースタ110内の現在負圧値と目標負圧値(高速時負圧値Ph)との差分に基づいて、電動バキュームポンプ111の必要駆動時間を算出し、走行速度が所定速度となると予測される時刻の必要駆動時間前から電動バキュームポンプ111の駆動を開始する。
【0028】
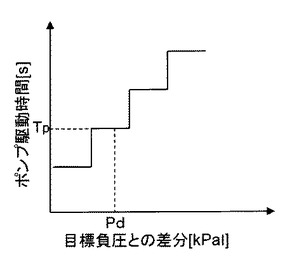
図3は、電動バキュームポンプ111の必要駆動時間を算出方法の一例を示す説明図である。電動バキュームポンプ111の性能は既知であるため、電動バキュームポンプ111の駆動時間と発生させることができる負圧値との関係は図4のグラフのように示すことができる。図4のグラフにおいて、縦軸は電動バキュームポンプ111の駆動時間、横軸は現在のブレーキブースタ110内の現在負圧値と目標負圧値(高速時負圧値Ph)との差分値である。たとえば、現在負圧値と目標負圧値との差分がPdの場合、ブレーキブースタ110内を目標負圧値とするには、時間Tdだけブレーキブースタ110を駆動させればよい。
【0029】
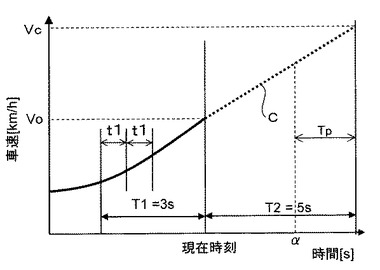
図3を用いて具体的に説明すると、たとえば、車両100の走行速度が現在時刻から時間T2後に所定速度Vcとなり、必要駆動時間がTd(Td<T2)の場合、駆動手段132は、現在時刻からT2−Td後である時刻αに電動バキュームポンプ111の駆動を開始する。これにより、所定速度となった時点におけるブレーキブースタ110内の負圧を確実に高速時負圧値Phとすることができ、所定速度となった時点において必要な負圧値を得ることができる。
【0030】
なお、駆動手段132は、ブレーキブースタ110内が高速時負圧値Phとなるように電動バキュームポンプ111の駆動を開始させた後、車両100のブレーキペダル103が操作されている間は電動バキュームポンプ111の駆動を継続させる。これにより、加速時のブレーキ操作中における制動力を向上させることができる。
【0031】
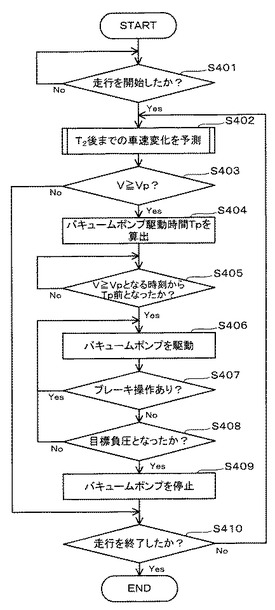
図4は、電動バキュームポンプ制御装置による電動バキュームポンプ制御処理の手順を示すフローチャートである。なお、図4のフローチャートとは別に、駆動手段132は、車両100の走行中は、ブレーキブースタ110内の負圧室の圧力値を通常圧力値Plに保つように、電動バキュームポンプ111を駆動させている。
【0032】
図4のフローチャートにおいて、電動バキュームポンプ制御装置(EV−ECU130)は、車両100が走行を開始するまで待機する(ステップS401:Noのループ)。車両100が走行を開始すると(ステップS401:Yes)、予測手段131は、現在時刻から所定時間T2後までの車速変化を予測する(ステップS402)。なお、ステップS402の処理の詳細は、図5のフローチャートにおいて説明する。
【0033】
駆動手段132は、現在時刻から所定時間T2後までの間に車両100の速度Vが所定速度Vp以上になるか否かを判断する(ステップS403)。車両100の速度Vが所定速度Vp以上にならない場合は(ステップS403:No)、ステップS410に移行する。一方、車両100の速度Vが所定速度Vp以上になる場合(ステップS403:Yes)、駆動手段132は、ブレーキブースタ110内の現在負圧値と目標負圧値(高速時負圧値Ph)との差分に基づいて、電動バキュームポンプ111の駆動時間Tpを算出する(ステップS404)。
【0034】
つぎに、駆動手段132は、車両100の速度Vが所定速度Vp以上になる時刻からTp前となるまで待機して(ステップS405:Noのループ)、速度Vが所定速度Vp以上になる時刻からTp前となると(ステップS405:Yes)、電動バキュームポンプ111を駆動させる(ステップS406)。電動バキュームポンプ111を駆動させている間に、ブレーキ操作があった場合は(ステップS407:Yes)、ステップS406に戻り、電動バキュームポンプ111の駆動を継続する。
【0035】
一方、ブレーキ操作がない場合は(ステップS407:No)、ブレーキブースタ110内の現在負圧値が目標負圧値(高速時負圧値Ph)となったか否かを判断し(ステップS408)、目標負圧値となるまでは(ステップS408:No)、ステップS406に戻り、電動バキュームポンプ111の駆動を継続する。ブレーキブースタ110内の現在負圧値が目標負圧値となると(ステップS408:Yes)、駆動手段132は、電動バキュームポンプ111を停止させる(ステップS409)。なお、ステップS408では、電動バキュームポンプ111の駆動時間がTpとなったか否かの判断をおこなってもよい。
【0036】
電動バキュームポンプ制御装置(EV−ECU130)は、車両100が走行を終了するまでは(ステップS410:Noのループ)、ステップS402に戻り以降の処理を継続する。そして、車両100が走行を終了すると(ステップS410:Yes)、本フローチャートによる処理を終了する。
【0037】
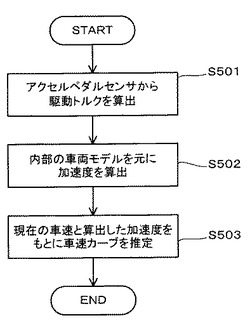
図5は、予測手段131による車速変化の予測処理の手順を示すフローチャートである。図5のフローチャートにおいて、予測手段131は、アクセルペダルセンサからの出力値を用いて駆動トルクを算出する(ステップS501)。つぎに、予測手段131は、ステップS501で算出した駆動トルクおよび車両内部に記憶された加速度モデルに基づいて、車両100の加速度を算出する(ステップS502)。このとき、必要に応じて現在の実際の車両100の加速度を用いて補正をおこなう。そして、現在の車両100の走行速度と、ステップS502で算出した加速度に基づいて走行速度の変化を示す速度カーブを予測して(ステップS503)、本フローチャートによる処理を終了する。
【0038】
以上説明したように、実施の形態にかかる電動バキュームポンプ制御装置は、車両100の走行速度の変化をあらかじめ予測して、走行速度が所定速度以上になると予測される場合には、その前にブレーキブースタ110内の負圧が目標負圧値となるように電動バキュームポンプ111を駆動する。これにより、車両100の走行速度が所定速度以上となった時点においてブレーキブースタ110内の負圧は目標負圧値となっており、当該速度において必要なブレーキアシスト力を確保することができる。
【0039】
また、電動バキュームポンプ制御装置は、車両100の走行速度が所定速度となると予測される時刻、およびブレーキブースタ110内の負圧を目標負圧値にするまでに必要な電動バキュームポンプ111の駆動時間を算出して、電動バキュームポンプ111の駆動を開始する。これにより、所定速度となった時点におけるブレーキブースタ110内の負圧をより確実に目標負圧値とすることができる。
【0040】
さらに、電動バキュームポンプ制御装置は、電動バキュームポンプ111の駆動を開始させた後、車両100のブレーキペダル103が操作されている間は電動バキュームポンプ111の駆動を継続させるので、加速時のブレーキ操作中における制動力を向上させることができる。
【符号の説明】
【0041】
100……車両、101……タイヤ、102……モーター、103……ブレーキペダル、104……マスターシリンダー、105……ブレーキ配管、106……ディスクローター、107……ブレーキキャリパー、110……ブレーキブースタ、111……電動バキュームポンプ、121……モーター回転数センサ、122……車輪速度センサ、123……横滑り防止ニット、124……ブレーキ油圧センサ、125……車両速度算出部、130……EV−ECU、131……予測手段、132……駆動手段。
【技術分野】
【0001】
本発明は、車両のブレーキブースタ内に負圧を発生させる電動バキュームポンプの駆動を制御する電動バキュームポンプ制御装置に関する。
【背景技術】
【0002】
従来、自動車のブレーキ機構において、ブレーキペダルへの踏み込み力によってブレーキマスターシリンダー内のピストンを駆動する際に、負圧によってピストンの駆動を補助するブレーキブースタ(真空倍力装置)が用いられている。このブレーキブースタ内の負圧は、主に電気自動車などでは、電動バキュームポンプを用いて発生させている(たとえば、下記特許文献1および2参照)。下記特許文献1では、ブレーキブースタが搭載された車両のシフト位置に応じてバキュームポンプの駆動時間を変更する技術が開示されている。また、下記特許文献2では、車両の速度に応じてバキュームタンク内の目標負圧を設定して電動バキュームポンプを駆動する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭62−61868号公報
【特許文献2】特許2864410号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常の電動バキュームパンプは、ブレーキブースタ内の負圧値が所定の閾値以下になると駆動し、目標負圧に到達すると停止するように駆動制御される。しかしながら、車両の速度が高速になるほど高い制動力が必要となるため、ブレーキブースタ内の負圧値を常時一定範囲としたのでは、ブレーキに対するアシスト力を十分活用できないという問題点がある。
【0005】
また、上述した特許文献1および2では、現在の車両速度(またはシフト位置)に基づいて電動バキュームポンプで発生させる負圧を設定(高速になるほど大きい負圧を発生させるように設定)しているものの、バキュームタンク内の負圧値が所望の値となるまでには、電動バキュームポンプの駆動を開始してから所定の時間が必要となる。このため、車両速度が高速となり、電動バキュームポンプの駆動を開始した直後にブレーキ操作をおこなった場合などは、必要なアシスト力を得られない可能性があるという問題点がある。
【0006】
本発明は、上述した従来技術の問題点を鑑みてなされたものであり、車両の速度が変化する場合においても常に必要なブレーキアシスト力を得られるように電動バキュームポンプを駆動制御することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明にかかる電動バキュームポンプ制御装置は、車両のブレーキブースタ内に負圧を発生させる電動バキュームポンプの駆動を制御する電動バキュームポンプ制御装置であって、現在時刻から所定時間内における前記車両の走行速度の変化を予測する予測手段と、前記予測手段によって前記走行速度が前記所定時間内に所定速度以上になると予測された場合、前記走行速度が前記所定速度以上となる前に、前記ブレーキブースタ内の負圧を前記車両の走行速度が所定速度以上となった場合における目標負圧値とするように前記電動バキュームポンプを駆動させる駆動手段と、を備えたことを特徴とする。
【発明の効果】
【0008】
請求項1の発明によれば、所定時間内における車両の走行速度の変化をあらかじめ予測して、所定時間内に所定速度以上になると予測される場合には、走行速度が所定速度となる前にブレーキブースタ内の負圧が目標負圧値となるように電動バキュームポンプを駆動する。これにより、車両の走行速度が所定速度以上となった時点においてブレーキブースタ内の負圧は目標負圧値となっており、当該速度において必要なブレーキアシスト力を確保することができる。
【0009】
請求項2の発明によれば、車両の走行速度が所定速度となると予測される時刻、およびブレーキブースタ内の負圧を目標負圧値にするまでに必要な電動バキュームポンプの駆動時間を算出して、電動バキュームポンプの駆動を開始する。これにより、所定速度となった時点におけるブレーキブースタ内の負圧をより確実に目標負圧値とすることができる。
【0010】
請求項3の発明によれば、電動バキュームポンプの駆動を開始させた後、車両のブレーキペダルが操作されている間は電動バキュームポンプの駆動を継続させるので、加速時のブレーキ操作中における制動力を向上させることができる。
【図面の簡単な説明】
【0011】
【図1】実施の形態にかかる電動バキュームポンプ制御装置を適用した車両100の構成を示す説明図である。
【図2】予測手段131による走行速度の予測方法の一例を示す説明図である。
【図3】電動バキュームポンプ111の必要駆動時間を算出方法の一例を示す説明図である。
【図4】電動バキュームポンプ制御装置による電動バキュームポンプ制御処理の手順を示すフローチャートである。
【図5】予測手段131による車速変化の予測処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下に添付図面を参照して、本発明にかかる電動バキュームポンプ制御装置の好適な実施の形態を詳細に説明する。以下の実施の形態では、電動自動車である車両100に対して、本発明にかかる電動バキュームポンプ制御装置を適用した場合の例について説明する。なお、本明細書において、負圧とは大気圧と比較して低い(大気圧を0とした場合、負となる)圧力状態にあることをいい、「負圧が高い」とは大気圧との圧力差がマイナス方向に大きいことを、「負圧が低い」とは大気圧との圧力差がマイナス方向に小さいことを示すものとする。
【0013】
(実施の形態)
図1は、実施の形態にかかる電動バキュームポンプ制御装置を適用した車両100の構成を示す説明図である。図1においては、車両100に対する電動バキュームポンプ制御装置の適用と関係しない構成については、図示を省略している。車両100は、電気自動車であり、図示しないバッテリーに蓄積された電力によってモーター102を駆動して、タイヤ101を回転させて走行する。
【0014】
タイヤ101の回転は、運転者によるブレーキペダル103の操作によって制動される。運転者によってブレーキペダル103が踏み込まれると、その踏み込み力によってマスターシリンダー104内のピストンが駆動され、マスターシリンダー104内に充填されたブレーキ液が押し出される。押し出されたブレーキ液は、ブレーキ配管105を伝ってブレーキキャリパ107へと伝送される。なお、ブレーキペダル103および図示しないアクセルペダルへの踏み込み力は、ペダルセンサによってそれぞれ計測され、後述するEV−ECU130へと出力される。
【0015】
ブレーキキャリパー107には、ブレーキパッドおよびピストンが設けられている。ブレーキキャリパー107では、ブレーキ液に伝えられた圧力の作用よってピストンが駆動され、ブレーキパッドをディスクローター106へと押し付ける。そして、ディスクローター106とブレーキパッドとの間の摩擦によって、タイヤ101の運動エネルギーが熱エネルギーとして空気中に放出され、タイヤ101の回転が停止し、車両100が停止する。
【0016】
ここで、ブレーキペダル103への踏み込み力がマスターシリンダー104に伝達される際には、ブレーキブースタ110によって踏み込み力を増幅させることによって、車両100の制動に必要な圧力を得る。ブレーキブースタ110の内部は、ブレーキペダル103側およびマスターシリンダー104側の2つの区画に隔てられている。ブレーキペダル103側の区画(以下、「大気圧室」という)は大気圧と同じ圧力状態に保たれる一方、マスターシリンダー104側の区画(以下、「負圧室」という)には負圧が発生され、大気圧よりも低い圧力状態とされる。この2つの区画間の圧力差によって、ブレーキペダル103側からマスターシリンダー104側へと向かう力が発生し、マスターシリンダー104内のピストンを押す力を補助する。
【0017】
ブレーキブースタ110の負圧室内の負圧は、電動バキュームポンプ111によって発生させる。電動バキュームポンプ111は、モーターで駆動されるポンプによって負圧室内の空気を吸い出すことによって、負圧室内の圧力状態を大気圧よりも低くする。ブレーキブースタ110は、後述するEV−ECU130の駆動手段132によって駆動制御される。
【0018】
モーター回転数センサ121は、単位時間あたりのモーター102の回転数を計測する。車輪速度センサ122は、各タイヤ101に設けられ、各タイヤ101の回転速度を計測する。モーター回転数センサ121および車輪速度センサ122で得られた計測値は、それぞれ横滑り防止ユニット123へと出力される。
【0019】
横滑り防止ユニット123は、滑りやすい路面での走行や急なハンドル操作などをおこなった際にも安全に走行できるよう、車両100のブレーキングやモーター出力などを制御する装置である。横滑り防止ユニット123には、ブレーキ油圧センサ124および車両速度算出部125が設けられている。ブレーキ油圧センサ124は、各タイヤ101に伝送されるブレーキ液の油圧を計測する。車両速度算出部125は、モーター回転数センサ121や車輪速度センサ122などを用いて、車両100の走行速度を算出する。
【0020】
EV−ECU130は、CPU、制御プログラムなどを格納・記憶するROM、制御プログラムの作動領域としてのRAM、各種データを書き換え可能に保持するEEPROM、周辺回路等とのインターフェースをとるインターフェース部などを含んで構成される。EV−ECU130は、横滑り防止ユニット123を含む車両100の各部とインターフェース部を介して接続され、それら各部との間で情報の授受をおこない、各部の制御を司る。
【0021】
また、EV−ECU130は、上記CPUが上記制御プログラムを実行することによって、予測手段131および駆動手段132を実現する。すなわち、本実施の形態においては、EV−ECU130のCPUが制御プログラムを実行することによって、電動バキュームポンプ制御装置を実現する。
【0022】
予測手段131は、車両100の走行中において、現在時刻から所定時間内における車両100の走行速度の変化を予測する。
図2は、予測手段131による走行速度の予測方法の一例を示す説明図である。図2は、車両100の走行速度の時間変化を示すグラフであり、縦軸は速度(km/h)、横軸は時刻(s)を示している。予測手段131は、走行中は常時車両100の速度変化を記録している。現在時刻から所定時間T2後までの間(図3では5秒とする)における車両100の速度変化を予測する場合、予測手段131は、現在時刻から時間T1さかのぼった間(図3では3秒とする)の速度変化を、サンプリング時間t1(単位時刻:図3では100ms)ごとに測定する。予測手段131は、サンプリング時間t1ごとの速度の差分から各単位時刻における加速度を推定し、さらに、現在時刻から時間T1さかのぼった間の加速度の平均値を算出する。
【0023】
この平均値から所定時間T2後の速度を予測することにより、車両100の走行速度の変化を予測する。なお、予測手段131は、上述した実測値に加えて、図5に示すように駆動トルクや車両内部に記憶された加速度モデルなどを用いて加速度の予測精度を向上させている。
なお、予測手段131は、所定時間T2後の速度のみならず、現在時時刻から所定時間T2までの各単位時刻における走行速度を予測して、図2に示す速度カーブCを予測する。
また、所定時間T2は、たとえば、ブレーキブースタ110の負圧室の負圧値を、大気圧と同じ圧力値から高速時における目標負圧値(Ph)にするまでに必要な電動バキュームポンプ111の駆動時間以上とする。
【0024】
駆動手段132は、予測手段131によって車両100の走行速度が所定時間内に所定速度(Vp)以上になると予測された場合、走行速度が所定速度以上となる前に、ブレーキブースタ110内の負圧を車両100の走行速度が所定速度以上となった場合における目標負圧値(Ph:高速時負圧値)とするように電動バキュームポンプ111を駆動させる。
【0025】
ここで、駆動手段132は、車両100の走行中は、ブレーキブースタ110内の負圧室の圧力値を、大気圧(P0)より低い圧力値に保つように、電動バキュームポンプ111を駆動させている。このときの圧力値を通常負圧値Pl(Pl<P0)とする。駆動手段132は、負圧室の圧力値が通常負圧値Pl以上になると、電動バキュームポンプ111を駆動させて、負圧室の圧力値が通常負圧値Pl以下となるようにする。
【0026】
一方、車両100の走行速度が高速(所定速度以上)となる場合、その制動には通常走行時より大きな力が必要となる。このため、駆動手段132は、車両100の走行速度が高速(所定速度以上)となる場合には、負圧室の圧力値を通常負圧値Plよりも低い高速時負圧値Ph(Ph<Pl)とする。これは、ブレーキブースタ110内の負圧室の負圧値が高いほど、すなわち、大気圧との圧力差が大きいほど、マスターシリンダー104のピストンに作用する力を大きくすることができ、より大きな制動力を得ることができるためである。
【0027】
このため、駆動手段132は、車両100の走行速度が所定速度以上になると予測された場合、電動バキュームポンプ111を駆動させ、走行速度が所定速度以上となる前に、ブレーキブースタ110内の負圧を高速時負圧値Phとする。このとき、駆動手段132は、ブレーキブースタ110内の現在負圧値と目標負圧値(高速時負圧値Ph)との差分に基づいて、電動バキュームポンプ111の必要駆動時間を算出し、走行速度が所定速度となると予測される時刻の必要駆動時間前から電動バキュームポンプ111の駆動を開始する。
【0028】
図3は、電動バキュームポンプ111の必要駆動時間を算出方法の一例を示す説明図である。電動バキュームポンプ111の性能は既知であるため、電動バキュームポンプ111の駆動時間と発生させることができる負圧値との関係は図4のグラフのように示すことができる。図4のグラフにおいて、縦軸は電動バキュームポンプ111の駆動時間、横軸は現在のブレーキブースタ110内の現在負圧値と目標負圧値(高速時負圧値Ph)との差分値である。たとえば、現在負圧値と目標負圧値との差分がPdの場合、ブレーキブースタ110内を目標負圧値とするには、時間Tdだけブレーキブースタ110を駆動させればよい。
【0029】
図3を用いて具体的に説明すると、たとえば、車両100の走行速度が現在時刻から時間T2後に所定速度Vcとなり、必要駆動時間がTd(Td<T2)の場合、駆動手段132は、現在時刻からT2−Td後である時刻αに電動バキュームポンプ111の駆動を開始する。これにより、所定速度となった時点におけるブレーキブースタ110内の負圧を確実に高速時負圧値Phとすることができ、所定速度となった時点において必要な負圧値を得ることができる。
【0030】
なお、駆動手段132は、ブレーキブースタ110内が高速時負圧値Phとなるように電動バキュームポンプ111の駆動を開始させた後、車両100のブレーキペダル103が操作されている間は電動バキュームポンプ111の駆動を継続させる。これにより、加速時のブレーキ操作中における制動力を向上させることができる。
【0031】
図4は、電動バキュームポンプ制御装置による電動バキュームポンプ制御処理の手順を示すフローチャートである。なお、図4のフローチャートとは別に、駆動手段132は、車両100の走行中は、ブレーキブースタ110内の負圧室の圧力値を通常圧力値Plに保つように、電動バキュームポンプ111を駆動させている。
【0032】
図4のフローチャートにおいて、電動バキュームポンプ制御装置(EV−ECU130)は、車両100が走行を開始するまで待機する(ステップS401:Noのループ)。車両100が走行を開始すると(ステップS401:Yes)、予測手段131は、現在時刻から所定時間T2後までの車速変化を予測する(ステップS402)。なお、ステップS402の処理の詳細は、図5のフローチャートにおいて説明する。
【0033】
駆動手段132は、現在時刻から所定時間T2後までの間に車両100の速度Vが所定速度Vp以上になるか否かを判断する(ステップS403)。車両100の速度Vが所定速度Vp以上にならない場合は(ステップS403:No)、ステップS410に移行する。一方、車両100の速度Vが所定速度Vp以上になる場合(ステップS403:Yes)、駆動手段132は、ブレーキブースタ110内の現在負圧値と目標負圧値(高速時負圧値Ph)との差分に基づいて、電動バキュームポンプ111の駆動時間Tpを算出する(ステップS404)。
【0034】
つぎに、駆動手段132は、車両100の速度Vが所定速度Vp以上になる時刻からTp前となるまで待機して(ステップS405:Noのループ)、速度Vが所定速度Vp以上になる時刻からTp前となると(ステップS405:Yes)、電動バキュームポンプ111を駆動させる(ステップS406)。電動バキュームポンプ111を駆動させている間に、ブレーキ操作があった場合は(ステップS407:Yes)、ステップS406に戻り、電動バキュームポンプ111の駆動を継続する。
【0035】
一方、ブレーキ操作がない場合は(ステップS407:No)、ブレーキブースタ110内の現在負圧値が目標負圧値(高速時負圧値Ph)となったか否かを判断し(ステップS408)、目標負圧値となるまでは(ステップS408:No)、ステップS406に戻り、電動バキュームポンプ111の駆動を継続する。ブレーキブースタ110内の現在負圧値が目標負圧値となると(ステップS408:Yes)、駆動手段132は、電動バキュームポンプ111を停止させる(ステップS409)。なお、ステップS408では、電動バキュームポンプ111の駆動時間がTpとなったか否かの判断をおこなってもよい。
【0036】
電動バキュームポンプ制御装置(EV−ECU130)は、車両100が走行を終了するまでは(ステップS410:Noのループ)、ステップS402に戻り以降の処理を継続する。そして、車両100が走行を終了すると(ステップS410:Yes)、本フローチャートによる処理を終了する。
【0037】
図5は、予測手段131による車速変化の予測処理の手順を示すフローチャートである。図5のフローチャートにおいて、予測手段131は、アクセルペダルセンサからの出力値を用いて駆動トルクを算出する(ステップS501)。つぎに、予測手段131は、ステップS501で算出した駆動トルクおよび車両内部に記憶された加速度モデルに基づいて、車両100の加速度を算出する(ステップS502)。このとき、必要に応じて現在の実際の車両100の加速度を用いて補正をおこなう。そして、現在の車両100の走行速度と、ステップS502で算出した加速度に基づいて走行速度の変化を示す速度カーブを予測して(ステップS503)、本フローチャートによる処理を終了する。
【0038】
以上説明したように、実施の形態にかかる電動バキュームポンプ制御装置は、車両100の走行速度の変化をあらかじめ予測して、走行速度が所定速度以上になると予測される場合には、その前にブレーキブースタ110内の負圧が目標負圧値となるように電動バキュームポンプ111を駆動する。これにより、車両100の走行速度が所定速度以上となった時点においてブレーキブースタ110内の負圧は目標負圧値となっており、当該速度において必要なブレーキアシスト力を確保することができる。
【0039】
また、電動バキュームポンプ制御装置は、車両100の走行速度が所定速度となると予測される時刻、およびブレーキブースタ110内の負圧を目標負圧値にするまでに必要な電動バキュームポンプ111の駆動時間を算出して、電動バキュームポンプ111の駆動を開始する。これにより、所定速度となった時点におけるブレーキブースタ110内の負圧をより確実に目標負圧値とすることができる。
【0040】
さらに、電動バキュームポンプ制御装置は、電動バキュームポンプ111の駆動を開始させた後、車両100のブレーキペダル103が操作されている間は電動バキュームポンプ111の駆動を継続させるので、加速時のブレーキ操作中における制動力を向上させることができる。
【符号の説明】
【0041】
100……車両、101……タイヤ、102……モーター、103……ブレーキペダル、104……マスターシリンダー、105……ブレーキ配管、106……ディスクローター、107……ブレーキキャリパー、110……ブレーキブースタ、111……電動バキュームポンプ、121……モーター回転数センサ、122……車輪速度センサ、123……横滑り防止ニット、124……ブレーキ油圧センサ、125……車両速度算出部、130……EV−ECU、131……予測手段、132……駆動手段。
【特許請求の範囲】
【請求項1】
車両のブレーキブースタ内に負圧を発生させる電動バキュームポンプの駆動を制御する電動バキュームポンプ制御装置であって、
現在時刻から所定時間内における前記車両の走行速度の変化を予測する予測手段と、
前記予測手段によって前記走行速度が前記所定時間内に所定速度以上になると予測された場合、前記走行速度が前記所定速度以上となる前に、前記ブレーキブースタ内の負圧を前記車両の走行速度が所定速度以上となった場合における目標負圧値とするように前記電動バキュームポンプを駆動させる駆動手段と、
を備えたことを特徴とする電動バキュームポンプ制御装置。
【請求項2】
前記予測手段は、前記所定時間内の各単位時刻における前記走行速度を予測し、
前記駆動手段は、前記ブレーキブースタ内の現在負圧値と前記目標負圧値との差分に基づいて、前記電動バキュームポンプの必要駆動時間を算出し、前記走行速度が前記所定速度となると予測される時刻の前記必要駆動時間前から前記電動バキュームポンプの駆動を開始することを特徴とする請求項1に記載の電動バキュームポンプ制御装置。
【請求項3】
前記駆動手段は、前記電動バキュームポンプの駆動を開始させた後、前記車両のブレーキペダルが操作されている間は前記電動バキュームポンプの駆動を継続させることを特徴とする請求項1または2に記載の電動バキュームポンプ制御装置。
【請求項1】
車両のブレーキブースタ内に負圧を発生させる電動バキュームポンプの駆動を制御する電動バキュームポンプ制御装置であって、
現在時刻から所定時間内における前記車両の走行速度の変化を予測する予測手段と、
前記予測手段によって前記走行速度が前記所定時間内に所定速度以上になると予測された場合、前記走行速度が前記所定速度以上となる前に、前記ブレーキブースタ内の負圧を前記車両の走行速度が所定速度以上となった場合における目標負圧値とするように前記電動バキュームポンプを駆動させる駆動手段と、
を備えたことを特徴とする電動バキュームポンプ制御装置。
【請求項2】
前記予測手段は、前記所定時間内の各単位時刻における前記走行速度を予測し、
前記駆動手段は、前記ブレーキブースタ内の現在負圧値と前記目標負圧値との差分に基づいて、前記電動バキュームポンプの必要駆動時間を算出し、前記走行速度が前記所定速度となると予測される時刻の前記必要駆動時間前から前記電動バキュームポンプの駆動を開始することを特徴とする請求項1に記載の電動バキュームポンプ制御装置。
【請求項3】
前記駆動手段は、前記電動バキュームポンプの駆動を開始させた後、前記車両のブレーキペダルが操作されている間は前記電動バキュームポンプの駆動を継続させることを特徴とする請求項1または2に記載の電動バキュームポンプ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−112092(P2013−112092A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258484(P2011−258484)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]