
電動作業車両の自己診断装置
【課題】簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供する。
【解決手段】作業装置1を駆動する油圧アクチュエータC1〜C6と、アクチュエータを作動させる油圧を発生するポンプ120と、ポンプを駆動する電動モータ210とを有する電動作業車両の自己診断装置300を、ポンプの吐出圧力と回転速度との積を電動モータに供給された電力量と比較して異常を判別する構成とする。
【解決手段】作業装置1を駆動する油圧アクチュエータC1〜C6と、アクチュエータを作動させる油圧を発生するポンプ120と、ポンプを駆動する電動モータ210とを有する電動作業車両の自己診断装置300を、ポンプの吐出圧力と回転速度との積を電動モータに供給された電力量と比較して異常を判別する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動モータでポンプを駆動して油圧作業装置を作動させる電動作業車両の自己診断装置であって、簡単な構成によってシステム全体の異常を診断可能なものに関する。
【背景技術】
【0002】
塵芥収集車等の作業車両において、従来はエンジンの出力をパワーテイクオフ(PTO)機構で抽出し、油圧ポンプを駆動して油圧を発生させ、シリンダや油圧モータ等の油圧アクチュエータを駆動する構成が一般的であった。
近年、このような作業車両において、運用中の燃料消費量、CO2排出量、騒音などを低減するため、車載バッテリから電力供給される電動モータで油圧ポンプを駆動するようにした電動式のものが提案されている。
【0003】
また、作業車両においては、車両の運用中であっても、早期に異常を発見して機器類の破損を防止するため、自己診断機能を設けることが要望されている。
従来、車両の自己診断に関する技術として、例えば、特許文献1には、エンジンに供給される燃料性状、噴射量等から求められる化学エネルギと、車速等から求められる車両の運動エネルギ等とを比較し、燃費異常等を診断することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−133798号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
電動作業車両に自己診断装置を設ける場合において、例えば特許文献1に記載された技術のように、動力源の入力及び出力を比較して異常を診断する手法を採りいれて、モータへの入力電力と回転出力とを比較して異常診断を行うことが考えらえる。
しかし、この場合、診断が可能なのはモータ等の電気系に限られ、油圧回路等を含めたシステム全体を診断することは不可能である。また、油圧回路の出力を検出しようとしても、油圧作業装置に含まれる個々のシリンダ、油圧モータ等の油圧アクチュエータの出力をそれぞれ検出することは、事実上きわめて困難である。
【0006】
上述した問題に鑑み、本発明の課題は、簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供することである。
【課題を解決するための手段】
【0007】
本発明は、以下のような解決手段により、上述した課題を解決する。
請求項1に係る発明は、作業装置を駆動する油圧アクチュエータと、前記油圧アクチュエータを作動させる油圧を発生するポンプと、前記ポンプを駆動する電動モータとを有する電動作業車両の自己診断装置であって、前記ポンプの吐出圧力と前記ポンプ又は前記電動モータの回転速度との積を前記電動モータに供給された電力量と比較して異常を判別することを特徴とする電動作業車両の自己診断装置である。
電動モータを回転させるために使用したエネルギに、システムの効率を乗じた値は、ポンプから発生し、各アクチュエータを作動させるのに使用したエネルギと実質的に一致する。
ここで、各アクチュエータを作動させるのに使用したエネルギは、ポンプの吐出圧力と回転速度(吐出量)との積から求めることができる。
正常時には、電動モータに供給された電力量と、ポンプの吐出圧力及び回転速度の積との間には、所定の相関関係が存在するが、電気系又は油圧系の少なくとも一方に異常がある場合は、エネルギロスが大きくなって相関関係が成り立たなくなる。
通常、電動モータのコントローラは、供給電力及びモータの回転速度に関する情報を持っていることから、本発明によれば、電動モータに供給された電力量と、ポンプの吐出圧力及び回転速度の積とを比較することによって、電動作業車両の異常を簡単な構成によって適切に検出することができる。
【0008】
請求項2に係る発明は、前記吐出圧力を検出する油圧センサを備えることを特徴とする請求項1に記載の電動作業車両の自己診断装置である。
これによれば、油圧センサで実際の油圧を測定し、診断に用いることによって、診断の精度を向上することができる。
請求項3に係る発明は、前記ポンプから前記油圧アクチュエータに供給される油圧を所定値以下に規制するレギュレータを備え、前記所定値を前記ポンプの吐出圧力として異常診断を行うことを特徴とする請求項1に記載の電動作業車両の自己診断装置である。
これによれば、油圧センサを設けない場合であっても、油圧の最大値は電動作業装置の仕様によって確定しているため、より簡単な構成によって診断を行なうことができる。
【発明の効果】
【0009】
以上説明したように、本発明によれば、簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本発明を適用した電動作業車両の自己診断装置の実施例1を有する塵芥収集車における側面視図である。
【図2】実施例1の塵芥収集車の後方斜視図である。
【図3】実施例1の塵芥収集車における塵芥収集装置の構成を示すブロック図である。
【図4】本発明を適用した電動作業車両の自己診断装置の実施例2を有する塵芥収集車における塵芥収集装置の構成を示すブロック図である。
【発明を実施するための形態】
【0011】
本発明は、簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供する課題を、モータに供給された電力量と、電動モータの回転速度と油圧との積とを比較して診断を行うことによって解決した。
【実施例1】
【0012】
以下、本発明を適用した電動作業車両の自己診断装置の実施例1について説明する。
実施例1において、電動作業車両は、例えば、電動式の塵芥収集装置を有する電動塵芥収集車である。
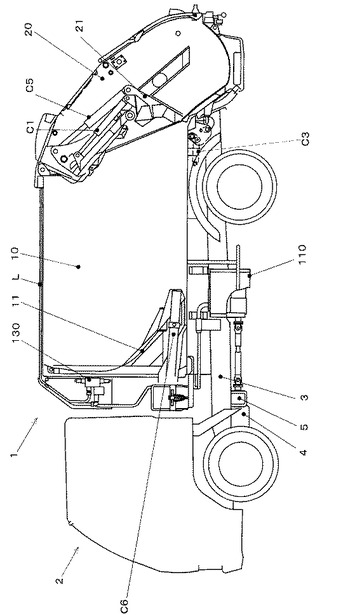
図1は、実施例1の塵芥収集車の側面視図である。
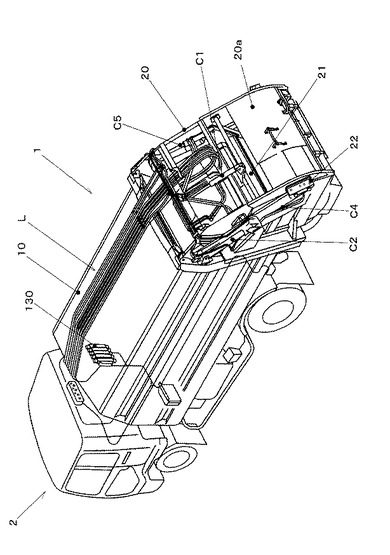
図2は、実施例1の塵芥収集車を斜め後方の斜め上方側から見た後方斜視図である。
図1、図2に示すように、塵芥収集装置1は、トラックシャーシ2に架装され、電動作業車両の一種である塵芥収集車を構成するものである。
トラックシャーシ2は、フレーム3、トランスミッション4、パワーテイクオフ(PTO)機構5等を備えている。
フレーム3は、キャビン及び塵芥収集装置1が搭載されるとともに、パワートレーンやサスペンション等が取り付けられる構造部材である。
トランスミッション4は、図示しないエンジンの回転出力を増減速し、プロペラシャフト及び最終減速装置を介して後輪車軸に伝達するものである。エンジンは、車両の走行用動力源であって、例えばディーゼルエンジン等の内燃機関である。
PTO機構5は、トランスミッション4に設けられ、エンジンの回転出力を抽出してポンプ120に伝達するものである。
【0013】
塵芥収集装置1は、ボデー10、テールゲートホッパ20、逆流防止シリンダC1、リフトシリンダC2、自動ロックシリンダC3、上下動シリンダC4、カキ込シリンダC5、排出シリンダC6等を備えている。
【0014】
ボデー10は、車両後方側に開口が設けられたボックス状に構成されている。
ボデー10は、回収された塵芥が内部に収容される部分である。
また、ボデー10の内部には、収容された塵芥を後方側へ押し出す排出パネル11が設けられている。
【0015】
テールゲートホッパ20は、ボデー10の後部開口を実質的に閉塞するように配置されている。
テールゲートホッパ20は、ボデー10の開口上端部に設けられたヒンジ回りに回動し、ボデー10の開口を開閉可能となっている。
テールゲートホッパ20は、作業者が塵芥を投入する開口を開閉するホッパドア20aを備えている。
テールゲートホッパ20は、積込パネル21によって投入した塵芥を圧縮しつつボデー10内に押し込む積込装置を備えている。
積込装置は、テールゲートホッパ20の下部に投入された塵芥を、所定の軌跡に沿って駆動される積込みパネル21によってすくい上げ、ボデー10内にかき込む。
また、テールゲートホッパ20のホッパドア20aの側部には、塵芥の積込作業時に作業者が塵芥収集装置1の各種機能を操作する操作盤22(図2参照)が設けられている。
【0016】
逆流防止シリンダC1は、積み込まれた塵芥の逆流を防止するため、逆流防止用のパネルのカキ込及び反転動作を行なう油圧シリンダである。
リフトシリンダC2は、テールゲートホッパ20を回動させてボデー10の開口を開閉する油圧シリンダである。
自動ロックシリンダC3は、テールゲートホッパ20をロックしてボデー10に対する相対回転を規制するロック機構を駆動する油圧シリンダである。
上下動シリンダC4は、テールゲートホッパ20の積込パネル21を上下させる油圧シリンダである。
カキ込シリンダC5は、積込パネル21のカキ込動作及び反転動作を行なう油圧シリンダである。
排出シリンダC6は、ボデー10内に積み込まれた塵芥を車両後方側へ押し出して排出する排出パネルの排出及び戻し動作を行なう油圧シリンダである。
【0017】
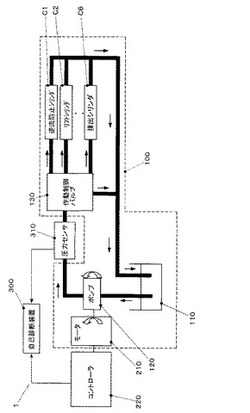
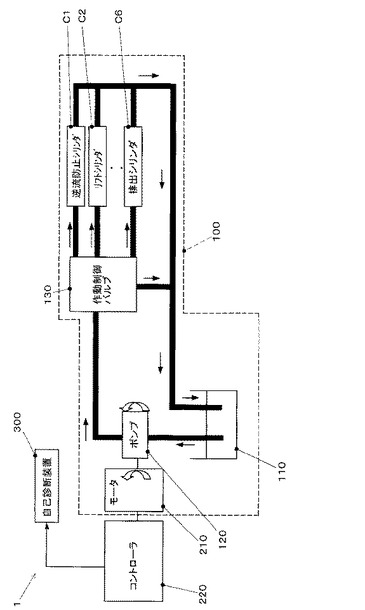
図3は、塵芥収集装置1の構成を示すブロック図である。
図3に示すように、塵芥収集装置は、各シリンダC1〜C6に油圧を供給する油圧回路100を備えている。
油圧回路100は、作動油タンク100、ポンプ120、作動制御バルブ130等を備えて構成されている。
【0018】
作動油タンク110は、各シリンダC1〜C6を駆動する作動油が貯留される容器である。作動油タンク110は、ポンプ120に作動油を供給するとともに、各シリンダC1〜C6から戻った作動油が、図示しないフィルタによって濾過された後に戻される。
ポンプ120は、作動油タンク110に貯留された作動油を加圧して吐出する、例えばギヤポンプ等のポンプである。また、ポンプ120の出口側には、必要に応じて、ポンプ120から吐出された高圧の作動油を蓄積する蓄圧容器である図示しないアキュムレータが設けられる。
【0019】
作動制御バルブ130は、ポンプ120から供給される作動油を、油圧ラインLを介して各シリンダC1〜C6に供給するものである。
作動制御バルブ130は、例えば、各シリンダC1〜C6にそれぞれ設けられた三位置の方向制御弁であるソレノイドバルブを有し、図示しない積込制御装置からの指令に基づいて供給される駆動電力に応じて、各シリンダC1〜C6への油圧の供給有無及び方向を切換える。
また、作動制御バルブ130には、ポンプ120から供給される油圧が予め設定された所定値以上となった場合に、リリーフバルブから作動油を逃がして作動油タンク110に戻し、各シリンダC1〜C6に供給される油圧を設定値以下とする、プレッシャレギュレータが設けられている。
【0020】
また、塵芥収集装置1は、モータ210、コントローラ220、自己診断装置300、圧力センサ310等を備えている。
モータ210は、ポンプ120のPTO機構5側の端部に、ポンプ120の入力軸と同軸に設けられた例えばACモータである。
モータ210の回転軸(出力軸)は、ポンプ120の入力軸に接続されている。このため、モータ210の回転速度(回転数)と、ポンプ120の回転速度(回転数)は一致する。
【0021】
コントローラ220は、図示しないバッテリが出力する電力をDC−AC変換してモータ210に供給し、モータ210を駆動させるとともに、モータ210の回転速度を制御するインバータを備えた制御装置である。
バッテリは、例えばリチウムイオン電池、ニッケル水素電池、鉛蓄電池等の2次電池であって、モータ210の駆動用の電力を供給するものである。
【0022】
自己診断装置300は、例えば、CPU等の情報処理装置、RAMやROM等の記憶手段、入出力インターフェイス及びこれらを接続するバス等を有して構成されている。
自己診断装置300は、ポンプ120の吐出側における油圧を検出する油圧センサ310の検出値、及び、コントローラ220が常時監視している、モータ210への供給電圧、電流、及び、モータ210の回転速度に基づいて、塵芥収集装置1の異常を検出するものである。
異常が検出された場合、自己診断装置300は、例えば、音声、警告、画像表示等を用いて車両を使用しているユーザに直接報知し、あるいは、通信によって例えばサービス拠点等の外部施設に対して連絡する。
【0023】
以下、実施例1における自己診断機能(異常検出機能)について説明する。
モータ210を回すために必要な電動エネルギは、消費電力(W)により、逐次計測することが可能である。
消費電力(W)は、電圧(V)と電流(A)との積により算出可能であり、コントローラ220は、モータ210への供給状況を常時監視することが可能となっている。
【0024】
実施例1の塵芥収集車においては、電力によりモータ210を回転させ、ポンプ120によって回転エネルギを油圧に変換し、作動制御バルブ130を介して各シリンダC1〜C6に伝達させている。
コントローラ220は、任意の設定速度でモータ210が回転するように制御しており、モータ210の回転速度はコントローラ220によって監視可能である。
【0025】
モータ210の回転速度が把握できている状況において、ポンプ120が発生する油圧の圧力値が把握されていれば、以下の式1、2より、必要なモータ210の電力が算出可能である(式中の数値は一例である)。
トルクT=(油圧×ポンプ容量)/(2π×100)
=(180kgf/cm2 × 50.6cc/rev)/(2π×100)
=14.5 (kg・m)
=142.1 (N・m)・・・(式1)
出力 =2π×T×回転数/60000
=2π×142.1 (N・m)×1200(rpm)/60000
=17.9 (kW)・・・(式2)
【0026】
仮に、装置全体の損失が全く存在しなければ、モータ210を回転させるために使用したエネルギと、ポンプ120から発生し、各シリンダC1〜C6を作動させるために使用したエネルギとは同等になる。
すなわち、以下の式3が成り立つ。
モータを回すために使用した電圧×電流=油圧×ポンプ回転数×定数・・・(式3)
【0027】
実際には、エネルギを伝達する段階で、エネルギロスが発生するため、上述した式3は完全にはイコールとはならないものの、ロスが少ないシステムでは、モータ210に与えたエネルギと、油圧回路のエネルギが近似するようになる。
ここで、仮に油圧回路や、電気回路に異常が発生した場合には、エネルギロスが大きくなるので、上述した式3の左辺と右辺との乖離が大きくなる。
そこで、異常診断装置300では、式3の左辺と右辺との乖離が、予め設定された閾値以上となったときに異常を判定するようにしている。
【0028】
以上説明した実施例1によれば、モータ210への供給電力と、ポンプ120の回転速度及び吐出圧力の積との相関関係の変化に基づいて異常を検出することによって、簡単な構成によって精度よく塵芥収集装置1の電気系、油圧系の異常を検出することができる。これによって、トラブルの発生時に早期発見して、機器類の破損を未然に防止することができる。
【実施例2】
【0029】
次に、本発明を適用した電動作業車両の自己診断装置の実施例2について説明する。
以下説明する実施例2において、上述した実施例1と実質的に共通する箇所については同じ符号を付して説明を省略し、主に相違点について説明する。
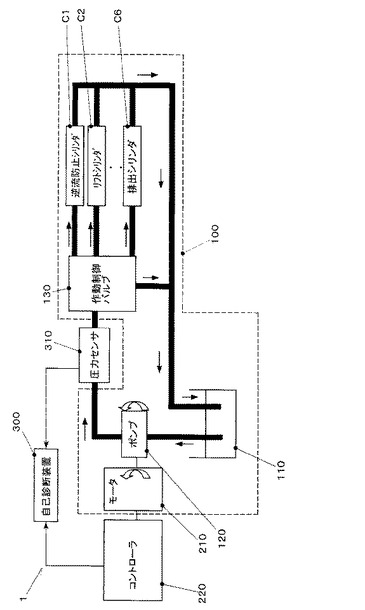
図4は、実施例2における塵芥収集装置の構成を示すブロック図である。
【0030】
実施例2においては、実施例1から油圧センサ310を省略するとともに、作動制御バルブ130に設けられ、供給油圧を所定の設定値以下となるように規制するプレッシャレギュレータの設定値を、診断時の圧力の値として用いている。
以上説明した実施例2によれば、上述した実施例1の効果と実質的に同様の効果に加えて、油圧センサを省略し、より簡単な構成によって、適切に自己診断を行なうことができる。
【0031】
(変形例)
本発明は、以上説明した実施例に限定されることなく、種々の変形や変更が可能であって、それらも本発明の技術的範囲内である。
例えば、自己診断装置、塵芥収集車及び塵芥収集装置の構成は、上述した実施例のものに限らず、適宜変更することが可能である。例えば、実施例の塵芥収集装置は圧縮板式のものであったが、回転板式のものであってもよい。
また、本発明は塵芥収集車に限らず、例えばパワーローダやダンプ等の他種の電動作業車両にも適用することが可能である。
【符号の説明】
【0032】
1 塵芥収集装置 2 トラックシャーシ
3 フレーム 4 トランスミッション
5 PTO機構
10 ボデー 11 排出パネル
20 テールゲートホッパ 20a ホッパドア
21 積込パネル 22 操作盤
C1 逆流防止シリンダ C2 リフトシリンダ
C3 自動ロックシリンダ C4 上下動シリンダ
C5 カキ込シリンダ C6 排出シリンダ
100 油圧回路 110 作動油タンク
120 ポンプ 130 作動制御バルブ
210 モータ 220 コントローラ
300 自己診断装置 310 圧力センサ
【技術分野】
【0001】
本発明は、電動モータでポンプを駆動して油圧作業装置を作動させる電動作業車両の自己診断装置であって、簡単な構成によってシステム全体の異常を診断可能なものに関する。
【背景技術】
【0002】
塵芥収集車等の作業車両において、従来はエンジンの出力をパワーテイクオフ(PTO)機構で抽出し、油圧ポンプを駆動して油圧を発生させ、シリンダや油圧モータ等の油圧アクチュエータを駆動する構成が一般的であった。
近年、このような作業車両において、運用中の燃料消費量、CO2排出量、騒音などを低減するため、車載バッテリから電力供給される電動モータで油圧ポンプを駆動するようにした電動式のものが提案されている。
【0003】
また、作業車両においては、車両の運用中であっても、早期に異常を発見して機器類の破損を防止するため、自己診断機能を設けることが要望されている。
従来、車両の自己診断に関する技術として、例えば、特許文献1には、エンジンに供給される燃料性状、噴射量等から求められる化学エネルギと、車速等から求められる車両の運動エネルギ等とを比較し、燃費異常等を診断することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−133798号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
電動作業車両に自己診断装置を設ける場合において、例えば特許文献1に記載された技術のように、動力源の入力及び出力を比較して異常を診断する手法を採りいれて、モータへの入力電力と回転出力とを比較して異常診断を行うことが考えらえる。
しかし、この場合、診断が可能なのはモータ等の電気系に限られ、油圧回路等を含めたシステム全体を診断することは不可能である。また、油圧回路の出力を検出しようとしても、油圧作業装置に含まれる個々のシリンダ、油圧モータ等の油圧アクチュエータの出力をそれぞれ検出することは、事実上きわめて困難である。
【0006】
上述した問題に鑑み、本発明の課題は、簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供することである。
【課題を解決するための手段】
【0007】
本発明は、以下のような解決手段により、上述した課題を解決する。
請求項1に係る発明は、作業装置を駆動する油圧アクチュエータと、前記油圧アクチュエータを作動させる油圧を発生するポンプと、前記ポンプを駆動する電動モータとを有する電動作業車両の自己診断装置であって、前記ポンプの吐出圧力と前記ポンプ又は前記電動モータの回転速度との積を前記電動モータに供給された電力量と比較して異常を判別することを特徴とする電動作業車両の自己診断装置である。
電動モータを回転させるために使用したエネルギに、システムの効率を乗じた値は、ポンプから発生し、各アクチュエータを作動させるのに使用したエネルギと実質的に一致する。
ここで、各アクチュエータを作動させるのに使用したエネルギは、ポンプの吐出圧力と回転速度(吐出量)との積から求めることができる。
正常時には、電動モータに供給された電力量と、ポンプの吐出圧力及び回転速度の積との間には、所定の相関関係が存在するが、電気系又は油圧系の少なくとも一方に異常がある場合は、エネルギロスが大きくなって相関関係が成り立たなくなる。
通常、電動モータのコントローラは、供給電力及びモータの回転速度に関する情報を持っていることから、本発明によれば、電動モータに供給された電力量と、ポンプの吐出圧力及び回転速度の積とを比較することによって、電動作業車両の異常を簡単な構成によって適切に検出することができる。
【0008】
請求項2に係る発明は、前記吐出圧力を検出する油圧センサを備えることを特徴とする請求項1に記載の電動作業車両の自己診断装置である。
これによれば、油圧センサで実際の油圧を測定し、診断に用いることによって、診断の精度を向上することができる。
請求項3に係る発明は、前記ポンプから前記油圧アクチュエータに供給される油圧を所定値以下に規制するレギュレータを備え、前記所定値を前記ポンプの吐出圧力として異常診断を行うことを特徴とする請求項1に記載の電動作業車両の自己診断装置である。
これによれば、油圧センサを設けない場合であっても、油圧の最大値は電動作業装置の仕様によって確定しているため、より簡単な構成によって診断を行なうことができる。
【発明の効果】
【0009】
以上説明したように、本発明によれば、簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本発明を適用した電動作業車両の自己診断装置の実施例1を有する塵芥収集車における側面視図である。
【図2】実施例1の塵芥収集車の後方斜視図である。
【図3】実施例1の塵芥収集車における塵芥収集装置の構成を示すブロック図である。
【図4】本発明を適用した電動作業車両の自己診断装置の実施例2を有する塵芥収集車における塵芥収集装置の構成を示すブロック図である。
【発明を実施するための形態】
【0011】
本発明は、簡単な構成によって電気系及び油圧系の異常を診断可能な電動作業車両の自己診断装置を提供する課題を、モータに供給された電力量と、電動モータの回転速度と油圧との積とを比較して診断を行うことによって解決した。
【実施例1】
【0012】
以下、本発明を適用した電動作業車両の自己診断装置の実施例1について説明する。
実施例1において、電動作業車両は、例えば、電動式の塵芥収集装置を有する電動塵芥収集車である。
図1は、実施例1の塵芥収集車の側面視図である。
図2は、実施例1の塵芥収集車を斜め後方の斜め上方側から見た後方斜視図である。
図1、図2に示すように、塵芥収集装置1は、トラックシャーシ2に架装され、電動作業車両の一種である塵芥収集車を構成するものである。
トラックシャーシ2は、フレーム3、トランスミッション4、パワーテイクオフ(PTO)機構5等を備えている。
フレーム3は、キャビン及び塵芥収集装置1が搭載されるとともに、パワートレーンやサスペンション等が取り付けられる構造部材である。
トランスミッション4は、図示しないエンジンの回転出力を増減速し、プロペラシャフト及び最終減速装置を介して後輪車軸に伝達するものである。エンジンは、車両の走行用動力源であって、例えばディーゼルエンジン等の内燃機関である。
PTO機構5は、トランスミッション4に設けられ、エンジンの回転出力を抽出してポンプ120に伝達するものである。
【0013】
塵芥収集装置1は、ボデー10、テールゲートホッパ20、逆流防止シリンダC1、リフトシリンダC2、自動ロックシリンダC3、上下動シリンダC4、カキ込シリンダC5、排出シリンダC6等を備えている。
【0014】
ボデー10は、車両後方側に開口が設けられたボックス状に構成されている。
ボデー10は、回収された塵芥が内部に収容される部分である。
また、ボデー10の内部には、収容された塵芥を後方側へ押し出す排出パネル11が設けられている。
【0015】
テールゲートホッパ20は、ボデー10の後部開口を実質的に閉塞するように配置されている。
テールゲートホッパ20は、ボデー10の開口上端部に設けられたヒンジ回りに回動し、ボデー10の開口を開閉可能となっている。
テールゲートホッパ20は、作業者が塵芥を投入する開口を開閉するホッパドア20aを備えている。
テールゲートホッパ20は、積込パネル21によって投入した塵芥を圧縮しつつボデー10内に押し込む積込装置を備えている。
積込装置は、テールゲートホッパ20の下部に投入された塵芥を、所定の軌跡に沿って駆動される積込みパネル21によってすくい上げ、ボデー10内にかき込む。
また、テールゲートホッパ20のホッパドア20aの側部には、塵芥の積込作業時に作業者が塵芥収集装置1の各種機能を操作する操作盤22(図2参照)が設けられている。
【0016】
逆流防止シリンダC1は、積み込まれた塵芥の逆流を防止するため、逆流防止用のパネルのカキ込及び反転動作を行なう油圧シリンダである。
リフトシリンダC2は、テールゲートホッパ20を回動させてボデー10の開口を開閉する油圧シリンダである。
自動ロックシリンダC3は、テールゲートホッパ20をロックしてボデー10に対する相対回転を規制するロック機構を駆動する油圧シリンダである。
上下動シリンダC4は、テールゲートホッパ20の積込パネル21を上下させる油圧シリンダである。
カキ込シリンダC5は、積込パネル21のカキ込動作及び反転動作を行なう油圧シリンダである。
排出シリンダC6は、ボデー10内に積み込まれた塵芥を車両後方側へ押し出して排出する排出パネルの排出及び戻し動作を行なう油圧シリンダである。
【0017】
図3は、塵芥収集装置1の構成を示すブロック図である。
図3に示すように、塵芥収集装置は、各シリンダC1〜C6に油圧を供給する油圧回路100を備えている。
油圧回路100は、作動油タンク100、ポンプ120、作動制御バルブ130等を備えて構成されている。
【0018】
作動油タンク110は、各シリンダC1〜C6を駆動する作動油が貯留される容器である。作動油タンク110は、ポンプ120に作動油を供給するとともに、各シリンダC1〜C6から戻った作動油が、図示しないフィルタによって濾過された後に戻される。
ポンプ120は、作動油タンク110に貯留された作動油を加圧して吐出する、例えばギヤポンプ等のポンプである。また、ポンプ120の出口側には、必要に応じて、ポンプ120から吐出された高圧の作動油を蓄積する蓄圧容器である図示しないアキュムレータが設けられる。
【0019】
作動制御バルブ130は、ポンプ120から供給される作動油を、油圧ラインLを介して各シリンダC1〜C6に供給するものである。
作動制御バルブ130は、例えば、各シリンダC1〜C6にそれぞれ設けられた三位置の方向制御弁であるソレノイドバルブを有し、図示しない積込制御装置からの指令に基づいて供給される駆動電力に応じて、各シリンダC1〜C6への油圧の供給有無及び方向を切換える。
また、作動制御バルブ130には、ポンプ120から供給される油圧が予め設定された所定値以上となった場合に、リリーフバルブから作動油を逃がして作動油タンク110に戻し、各シリンダC1〜C6に供給される油圧を設定値以下とする、プレッシャレギュレータが設けられている。
【0020】
また、塵芥収集装置1は、モータ210、コントローラ220、自己診断装置300、圧力センサ310等を備えている。
モータ210は、ポンプ120のPTO機構5側の端部に、ポンプ120の入力軸と同軸に設けられた例えばACモータである。
モータ210の回転軸(出力軸)は、ポンプ120の入力軸に接続されている。このため、モータ210の回転速度(回転数)と、ポンプ120の回転速度(回転数)は一致する。
【0021】
コントローラ220は、図示しないバッテリが出力する電力をDC−AC変換してモータ210に供給し、モータ210を駆動させるとともに、モータ210の回転速度を制御するインバータを備えた制御装置である。
バッテリは、例えばリチウムイオン電池、ニッケル水素電池、鉛蓄電池等の2次電池であって、モータ210の駆動用の電力を供給するものである。
【0022】
自己診断装置300は、例えば、CPU等の情報処理装置、RAMやROM等の記憶手段、入出力インターフェイス及びこれらを接続するバス等を有して構成されている。
自己診断装置300は、ポンプ120の吐出側における油圧を検出する油圧センサ310の検出値、及び、コントローラ220が常時監視している、モータ210への供給電圧、電流、及び、モータ210の回転速度に基づいて、塵芥収集装置1の異常を検出するものである。
異常が検出された場合、自己診断装置300は、例えば、音声、警告、画像表示等を用いて車両を使用しているユーザに直接報知し、あるいは、通信によって例えばサービス拠点等の外部施設に対して連絡する。
【0023】
以下、実施例1における自己診断機能(異常検出機能)について説明する。
モータ210を回すために必要な電動エネルギは、消費電力(W)により、逐次計測することが可能である。
消費電力(W)は、電圧(V)と電流(A)との積により算出可能であり、コントローラ220は、モータ210への供給状況を常時監視することが可能となっている。
【0024】
実施例1の塵芥収集車においては、電力によりモータ210を回転させ、ポンプ120によって回転エネルギを油圧に変換し、作動制御バルブ130を介して各シリンダC1〜C6に伝達させている。
コントローラ220は、任意の設定速度でモータ210が回転するように制御しており、モータ210の回転速度はコントローラ220によって監視可能である。
【0025】
モータ210の回転速度が把握できている状況において、ポンプ120が発生する油圧の圧力値が把握されていれば、以下の式1、2より、必要なモータ210の電力が算出可能である(式中の数値は一例である)。
トルクT=(油圧×ポンプ容量)/(2π×100)
=(180kgf/cm2 × 50.6cc/rev)/(2π×100)
=14.5 (kg・m)
=142.1 (N・m)・・・(式1)
出力 =2π×T×回転数/60000
=2π×142.1 (N・m)×1200(rpm)/60000
=17.9 (kW)・・・(式2)
【0026】
仮に、装置全体の損失が全く存在しなければ、モータ210を回転させるために使用したエネルギと、ポンプ120から発生し、各シリンダC1〜C6を作動させるために使用したエネルギとは同等になる。
すなわち、以下の式3が成り立つ。
モータを回すために使用した電圧×電流=油圧×ポンプ回転数×定数・・・(式3)
【0027】
実際には、エネルギを伝達する段階で、エネルギロスが発生するため、上述した式3は完全にはイコールとはならないものの、ロスが少ないシステムでは、モータ210に与えたエネルギと、油圧回路のエネルギが近似するようになる。
ここで、仮に油圧回路や、電気回路に異常が発生した場合には、エネルギロスが大きくなるので、上述した式3の左辺と右辺との乖離が大きくなる。
そこで、異常診断装置300では、式3の左辺と右辺との乖離が、予め設定された閾値以上となったときに異常を判定するようにしている。
【0028】
以上説明した実施例1によれば、モータ210への供給電力と、ポンプ120の回転速度及び吐出圧力の積との相関関係の変化に基づいて異常を検出することによって、簡単な構成によって精度よく塵芥収集装置1の電気系、油圧系の異常を検出することができる。これによって、トラブルの発生時に早期発見して、機器類の破損を未然に防止することができる。
【実施例2】
【0029】
次に、本発明を適用した電動作業車両の自己診断装置の実施例2について説明する。
以下説明する実施例2において、上述した実施例1と実質的に共通する箇所については同じ符号を付して説明を省略し、主に相違点について説明する。
図4は、実施例2における塵芥収集装置の構成を示すブロック図である。
【0030】
実施例2においては、実施例1から油圧センサ310を省略するとともに、作動制御バルブ130に設けられ、供給油圧を所定の設定値以下となるように規制するプレッシャレギュレータの設定値を、診断時の圧力の値として用いている。
以上説明した実施例2によれば、上述した実施例1の効果と実質的に同様の効果に加えて、油圧センサを省略し、より簡単な構成によって、適切に自己診断を行なうことができる。
【0031】
(変形例)
本発明は、以上説明した実施例に限定されることなく、種々の変形や変更が可能であって、それらも本発明の技術的範囲内である。
例えば、自己診断装置、塵芥収集車及び塵芥収集装置の構成は、上述した実施例のものに限らず、適宜変更することが可能である。例えば、実施例の塵芥収集装置は圧縮板式のものであったが、回転板式のものであってもよい。
また、本発明は塵芥収集車に限らず、例えばパワーローダやダンプ等の他種の電動作業車両にも適用することが可能である。
【符号の説明】
【0032】
1 塵芥収集装置 2 トラックシャーシ
3 フレーム 4 トランスミッション
5 PTO機構
10 ボデー 11 排出パネル
20 テールゲートホッパ 20a ホッパドア
21 積込パネル 22 操作盤
C1 逆流防止シリンダ C2 リフトシリンダ
C3 自動ロックシリンダ C4 上下動シリンダ
C5 カキ込シリンダ C6 排出シリンダ
100 油圧回路 110 作動油タンク
120 ポンプ 130 作動制御バルブ
210 モータ 220 コントローラ
300 自己診断装置 310 圧力センサ
【特許請求の範囲】
【請求項1】
作業装置を駆動する油圧アクチュエータと、
前記油圧アクチュエータを作動させる油圧を発生するポンプと、
前記ポンプを駆動する電動モータと
を有する電動作業車両の自己診断装置であって、
前記ポンプの吐出圧力と前記ポンプ又は前記電動モータの回転速度との積を前記電動モータに供給された電力量と比較して異常を判別すること
を特徴とする電動作業車両の自己診断装置。
【請求項2】
前記吐出圧力を検出する油圧センサを備えること
を特徴とする請求項1に記載の電動作業車両の自己診断装置。
【請求項3】
前記ポンプから前記油圧アクチュエータに供給される油圧を所定値以下に規制するレギュレータを備え、
前記所定値を前記ポンプの吐出圧力として異常診断を行うこと
を特徴とする請求項1に記載の電動作業車両の自己診断装置。
【請求項1】
作業装置を駆動する油圧アクチュエータと、
前記油圧アクチュエータを作動させる油圧を発生するポンプと、
前記ポンプを駆動する電動モータと
を有する電動作業車両の自己診断装置であって、
前記ポンプの吐出圧力と前記ポンプ又は前記電動モータの回転速度との積を前記電動モータに供給された電力量と比較して異常を判別すること
を特徴とする電動作業車両の自己診断装置。
【請求項2】
前記吐出圧力を検出する油圧センサを備えること
を特徴とする請求項1に記載の電動作業車両の自己診断装置。
【請求項3】
前記ポンプから前記油圧アクチュエータに供給される油圧を所定値以下に規制するレギュレータを備え、
前記所定値を前記ポンプの吐出圧力として異常診断を行うこと
を特徴とする請求項1に記載の電動作業車両の自己診断装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−91460(P2013−91460A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235615(P2011−235615)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000002358)新明和工業株式会社 (919)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000002358)新明和工業株式会社 (919)
[ Back to top ]