
電気車制御装置
【課題】試行錯誤的な調整を行う必要なく、再粘着を確実に実現できる適切なトルク引き下げ量の決定が可能な電気車制御装置を提供する。
【解決手段】電気車両の主電動機を制御する電気車制御装置において、車輪の空転・滑走を検知する空転滑走検知器311と、車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令αsrefに基づいた再粘着トルクTref_limを出力する再粘着トルク演算器312と、空転・滑走を検知したときには、再粘着トルクTref_limを出力するトルク指令値演算器313と、を有し、すべり加速度を制御する。
【解決手段】電気車両の主電動機を制御する電気車制御装置において、車輪の空転・滑走を検知する空転滑走検知器311と、車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令αsrefに基づいた再粘着トルクTref_limを出力する再粘着トルク演算器312と、空転・滑走を検知したときには、再粘着トルクTref_limを出力するトルク指令値演算器313と、を有し、すべり加速度を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気車の良好な乗り心地を維持しつつ粘着力の有効利用を図った再粘着制御を実現する電気車制御装置に関するものである。
【背景技術】
【0002】
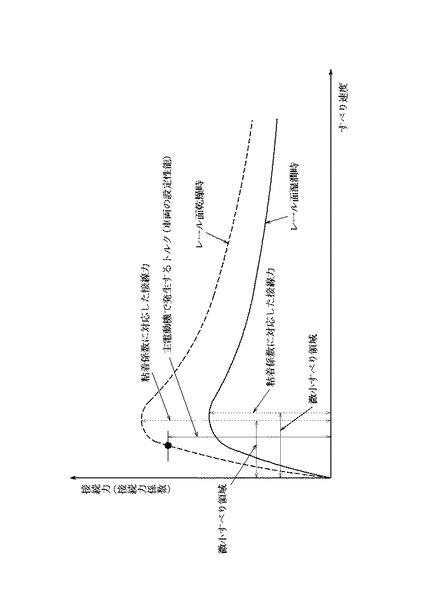
電気車は車輪・レール間の接線力(粘着力ともいう)によって加減速を行っているが、この接線力は、一般にすべり速度に対して図6のすべり速度・接線力係数特性の例を示す特性を有している。この接線力を軸重(車輪1軸当たりのレールに加わる垂直荷重)で割ったものを接線力係数といい、接線力係数の最大値を粘着係数という。図示の如く、接線力の最大値を超えないトルクを主電動機あるいはブレーキ時に主電動機トルクに併せて主電動機に機械的に結合された動軸(以下単に動軸と称する)の空気ブレーキ力とで発生している場合は、空転・滑走を発生せず、接線力の最大値より左側の微小なすべり速度の粘着領域で電気車は走行する。
【0003】
最大値より大きなトルクを発生するとすべり速度は増大し、接線力が低下するのでますますすべり速度が増大する空転・滑走状態になるが、車輪およびレールが乾燥状態では主電動機で発生するトルクあるいはブレーキ時には動軸の空気ブレーキ力と主電動機トルクの合算値は接線力の最大値を超えないように車両の性能が設定されるので、空転・滑走は発生しない。しかし、実線で示すように、レール面が雨などによって湿潤状態にある場合は、粘着係数が低下して接線力の最大値が車両の設定性能に対応したトルクより小さくなる。
【0004】
この場合、すべり速度が増大し空転・滑走状態となり、そのまま放置するとこれに対応して接線力係数が低下し、車両の加速・減速に必要な加減速力がますます低下してしまうので、迅速に空転・滑走を検出し、主電動機が発生するトルクを低減して再粘着させることが必要になる。このようにトルクの制御を行って再粘着させる場合、小さなすべり速度に抑制しつつ、主電動機の発生トルクあるいは動軸の空気ブレーキ力と主電動機発生トルクとの合算値を極力接線力の最大値近傍の値になるように制御することが、電気車の加減速性能を高める上で必要である。
【0005】
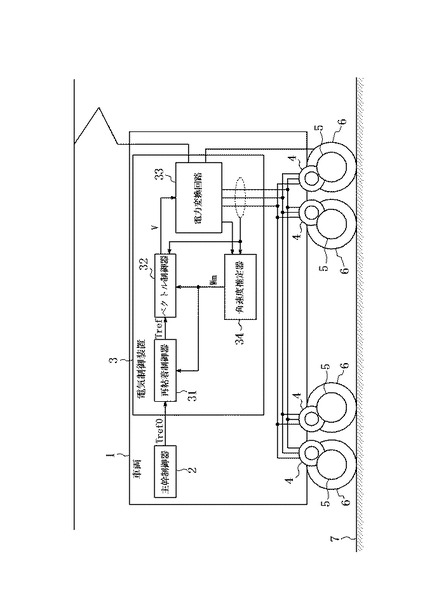
図7を用いて一般的な電気車制御装置の構成を説明する。図7は、4台の主電動機4を1台の電気車制御装置3で駆動する場合であるが、各主電動機4に対して個別の電気車制御装置3を用いる場合もある。しかしながら、基本的な制御の考え方はどちらも同一であるためその説明を省略する。
【0006】
主幹制御器2は、運転士の操作に基づき加減速するための元トルク指令値Tref0を出力する。
電気車制御装置3内の再粘着制御器31は、通常は元トルク指令値Tref0をそのままトルク指令値Trefとして出力するが、空転・滑走を検知した際は、再粘着させるために、元トルク指令値Tref0より小さい値をトルク指令値Trefとして出力する。
電気車制御装置3内のベクトル制御器32は、トルク指令値Trefに対応する電圧指令Vを生成する。
電気車制御装置3内の電力変換回路33は、電圧指令Vに対応する電圧を主電動機4に印加する。
電気車制御装置3内の角速度推定器34は、電力変換回路33の出力電圧・電流等から主電動機角速度Wmを推定する。なお、角速度推定器34の代わりに主電動機4に角速度検出器を設け、主電動機角速度を測定する場合もある。
【0007】
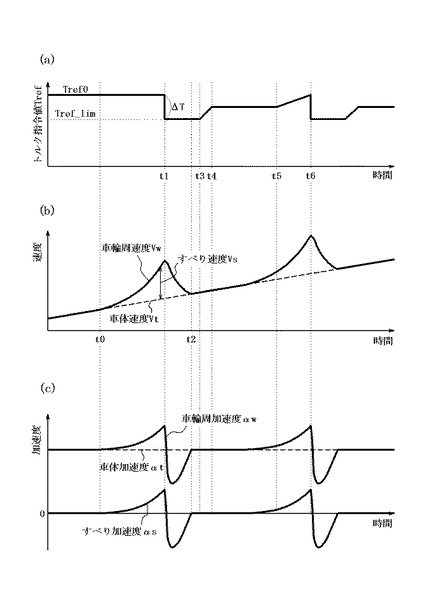
次に、図8を用いて、再粘着制御器31の動作について説明する。また、滑走時は軸加速度がマイナスになるが、その絶対値をとりブレーキトルク指令値をプラスの値で扱えば、空転時と同じように扱えるので、以下においては、特に断らない限り、空転の場合を例にとって説明する。
【0008】
トルク指令値Trefがそのときの粘着係数に対応したトルクよりも大きくなると、空転が発生して(t=t0)、図8(b)に示すように、車体速度Vtよりも車輪周速度Vwが急激に増加する。そして、空転を検知し(t=t1)、トルク指令値TrefをTref0からTref_limに引き下げると、車輪周速度Vwが減少して車体速度Vtに一致する(t=t2)。このとき、空転している動輪は再粘着したため、トルク指令値Trefをある値まで短時間(t=t3〜t4)のうちに増大させる。トルク指令値Trefをしばらく一定とした後(t=t4〜t5)、徐々にTref0まで増大させる(t=t6)。以降、t=t1〜t6の動作を繰り返す。
【0009】
ここで、トルク指令値Trefの引き下げ量(ΔT=Tref0−Tref_lim)および引き下げ時間(t2−t1)は、空転している動輪を確実に再粘着させることができる値のトルクとする必要がある。
【0010】
特許文献1では外乱オブザーバ等を用いた接線力係数推定器によって車輪・レール間の接線力を推定し、空転または滑走を検出したときに、前記接線力係数推定値に対応したトルクよりも小さいトルクを指令して空転または滑走状態から再粘着状態に戻した後に、前記接線力係数推定値に対応したトルクを指令するようにした制御器が記載されている。
なお、外乱オブザーバによる接線力推定の方法は、例えば、非特許文献1に記載されている。
【0011】
なお、空転・滑走の検知方法は主電動機の角加速度から検知する方法や、複数の主電動機の回転速度差から検知する手法等がある。(例えば、非特許文献2)
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2002−325307公報
【非特許文献】
【0013】
【非特許文献1】「速度センサレスベクトル制御・外乱オブザーバによる空転再粘着制御の実車両への適用とその評価」電気学会論文誌D、Vol.124(2004)、No.9、pp.909-916
【非特許文献2】「誘導電動機個別駆動方式電気機関車の再粘着制御に関する実験的考察」電気学会論文誌D、Vol.128(2008)、No.1、pp.1-7
【発明の概要】
【発明が解決しようとする課題】
【0014】
従来、トルク指令値Trefの引き下げ量ΔTおよび引き下げ時間をどの程度にすれば動輪を確実に再粘着できるかの把握が困難であった。
引き下げ量が小さすぎたり引き下げ時間が短すぎたりすると動輪の再粘着ができない一方で、引き下げ量が大きすぎたり引き下げ時間が長すぎたりすると加速性や乗り心地の悪化を招く。そのため、試行錯誤的に引き下げ量や引き下げ時間を変化させて調整する必要があり、大変な時間と労力が必要であった。
【0015】
特許文献1に記載の手法の場合、接線力係数推定器に対応したトルクよりも小さいトルクになるように引き下げることにより確実に再粘着できるものの、どの程度引き下げるのが適切か、また引き下げ時間をどの程度にすれば適切か把握するのが困難である。そのため、同様に試行錯誤的な調整する必要があり、大変な時間と労力が必要である。
【0016】
そこで、本発明の目的は、試行錯誤的な調整を行う必要なく、再粘着を確実に実現できる適切なトルク引き下げ量の決定が可能な電気車制御装置を提供することにある。
【課題を解決するための手段】
【0017】
本発明は、電気車両の主電動機を制御する電気車制御装置において、車輪の空転・滑走を検知する空転滑走検知器と、前記車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令に基づいた再粘着トルクを出力する再粘着トルク演算器と、空転・滑走を検知したときには、前記再粘着トルクを出力するトルク指令値演算器と、を有し、前記すべり加速度を制御することを特徴とするものである。
【0018】
本発明では、主電動機角速度と、トルク指令値もしくは演算値と、から車輪の接線力係数を推定する接線力係数推定器をさらに有し、前記再粘着トルク演算器は、前記接線力係数に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することが好ましい。
【0019】
本発明では、前記再粘着トルク演算器は、空転・滑走を検知した時点での接線力係数に基づいた再粘着トルクを出力することが好ましい。
【0020】
本発明では、前記再粘着トルク演算器は、前記電気車両の車体加速度に基づいた再粘着トルクを出力することが好ましい。
【0021】
本発明では、車体の加速度を推定し、車体加速度推定値を出力する車体加速度推定器をさらに有し、前記再粘着トルク演算器は、前記車体加速度推定値に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することが好ましい。
【0022】
本発明では、前記車体加速度推定値は、主電動機角速度から変換された車輪周加速度を遅延させて得られることが好ましい。
【発明の効果】
【0023】
本発明によれば、試行錯誤的な調整をしなくても、再粘着を確実に実現できる適切なトルク引き下げ量の決定が可能である。
【図面の簡単な説明】
【0024】
【図1】本発明の電気車制御装置の再粘着制御器の第1実施形態を示すブロック図である。
【図2】本発明の電気車制御装置の再粘着制御器の第2実施形態を示すブロック図である。
【図3】本発明の電気車制御装置の再粘着制御器の第3実施形態を示すブロック図である。
【図4】本発明の電気車制御装置の再粘着制御器の第4実施形態を示すブロック図である。
【図5】車体加速度推定器の一例を示すブロック図である。
【図6】すべり速度・接線力係数特性の一例である。
【図7】従来の技術による電気車制御装置の一例である。
【図8】再粘着制御時の挙動を説明する図である。
【発明を実施するための形態】
【0025】
以下、図面を参照して、本発明の電気車制御装置の実施形態を詳細に説明する。
【0026】
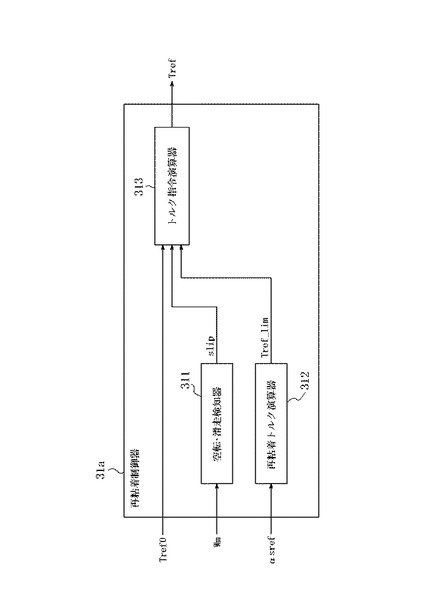
図1は、本発明の電気車制御装置の再粘着制御器の第1実施形態を示すブロック図である。電気車制御装置の再粘着制御以外の構成要素は、上述した従来例と同様であるため、その説明を省略する。
第1実施形態にかかる再粘着制御器31aは、空転・滑走検出器311と、再粘着トルク演算器312と、トルク指令演算器313と、を有する。
【0027】
空転・滑走検出器311には、主電動機角速度推定器(図示せず)が検出した主電動機角速度Wmが入力される。空転・滑走検出器311は、主電動機角速度Wmが所定の閾値を超えると、空転・滑走の発生を検知し、空転検知信号slipを出力する。また、空転・滑走検知器311は、主電動機角速度Wmが所定の閾値以下になると、空転検知信号slipの出力を停止する。
なお、空転・滑走検知器311は、非特許文献1のように他の手法を用いて空転・滑走を検知しても構わない。
【0028】
再粘着トルク演算器312には、すべり加速度指令αsrefが入力される。再粘着トルク演算器312は、すべり加速度指令αsrefに基づいて、再粘着トルクTref_limを算出する。
すべり加速度指令αsrefとは、希望するすべり加速度αsのことであり、すべり加速度αsは、すべり速度Vsの微分値、すなわち、図8(b)に示す車輪周速度Vwの傾きである。
【0029】
トルク指令演算器313には、元トルク指令値Tref0と、空転検知信号slipと、再粘着トルクTref_limとが入力される。トルク指令演算器313は、通常は、入力された元トルク指令値Tref0をそのままトルク指令値Trefとして出力するが、空転検知信号slipが入力されると、再粘着トルクTref_limをトルク指令値Trefとして一定時間(例えば、空転検知信号slipが入力されている間)出力する。
【0030】
本発明の第1実施形態にかかる再粘着制御器31aによれば、すべり加速度指令αsrefに基づいて、再粘着トルクTref_limを決定し、すべり加速度αsを制御するため、試行錯誤的な調整を行う必要なく、再粘着を確実に実現することができる。
【0031】
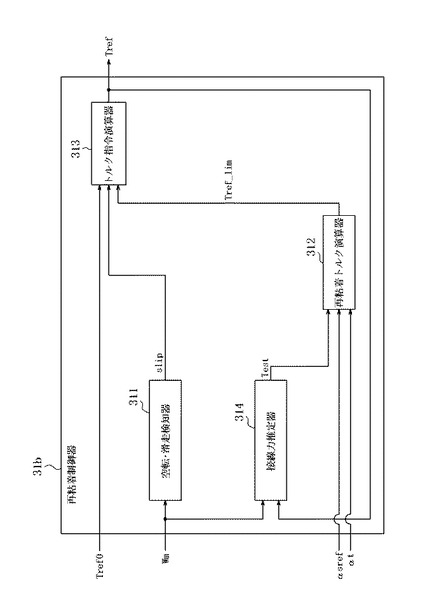
図2は、本発明の電気車制御装置の再粘着制御器の第2実施形態を示すブロック図である。
第2実施形態にかかる再粘着制御器31bは、空転・滑走検出器311と、再粘着トルク演算器312と、トルク指令演算器313と、に加えて、接線力推定器314を有する。第2実施形態において、第1実施形態と同様の構成要素には、同様の符号を付してその説明を省略する。
【0032】
接線力推定器314には、主電動機角速度Wmおよびトルク指令値Trefが入力される。接線力推定器314は、主電動機角速度Wmおよびトルク指令値Trefから、外乱オブザーバ等を用いて、車輪・レール間の接線力を主電動機側からみたものである負荷トルクTestを推定し、出力する。
なお、接線力推定器314による負荷トルクTestの推定方法は、従来技術と同様であるので、その説明を省略する。
また、接線力推定器314は、トルク指令値Trefを用いる代わりに、電流検出器を用いた主電動機トルクの演算値を用いることもできる。
【0033】
再粘着トルク演算器312には、負荷トルクTestと、すべり加速度指令αsref[m/s2]と、車体加速度検出器(図示せず)により検出された車体加速度αt[m/s2]が入力される。再粘着トルク演算器312は、(1)式により再粘着トルクTref_lim[N・m]を算出する。
【0034】
【数1】

【0035】
ここで、Rgは歯車比(主電動機の回転数/車輪の回転数)、rw[m]は車輪径、J[kg・m]は主電動機からみた主電動機・歯車装置・車軸・車輪の等価慣性モーメントである。
(1)式は、すべり加速度指令αsrefによって、空転を抑えるために必要なトルクの引き下げ量を任意に決定し、すべり加速度αsを制御可能なことを示している。
【0036】
本発明の第2実施形態にかかる再粘着制御器31bによれば、すべり加速度指令αsrefを用いた(1)式により、再粘着トルクTref_limを決定し、すべり加速度αsを制御するため、試行錯誤的な調整を行う必要なく、再粘着を確実に実現することができる。
さらに、外乱オブザーバ等を用いて、負荷トルクTestを推定することにより、レール面が乾燥状態にあるか、あるいは、雨などによって湿潤状態にあるかによって異なる接線力に対応でき、より正確な再粘着トルクを算出することができる。
【0037】
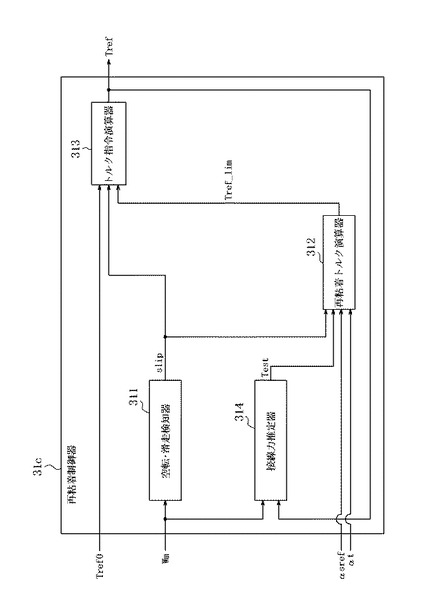
図3は、本発明の電気車制御装置の再粘着制御器の第3実施形態を示すブロック図である。
第3実施形態にかかる再粘着制御器31cは、再粘着トルク演算器312に空転検知信号slipが入力されている点以外、第2実施形態にかかる再粘着制御器31bと同様であるため、同様の構成要素には、同様の符号を付してその説明を省略する。
【0038】
再粘着トルク演算器312は、空転検知信号slipが入力された時点に入力された負荷トルクTestを保持して、再粘着トルクTref_limとして出力する。
上述した第2実施形態では、再粘着トルク演算器312は、負荷トルクTestの瞬時値を用いて、すなわち、リアルタイムに再粘着トルクTref_limを演算していた。しかしながら、接線力推定器314が出力する負荷トルクTestは、電気車の歯車・駆動装置等や台車の振動により微小に変化しており、このように微小に変化している負荷トルクTestを用いると、再粘着トルクTref_limが不安定になるおそれがある。
【0039】
本発明の第3実施形態にかかる再粘着制御器31cによれば、空転検知信号slipが入力された時点に入力された負荷トルクTestを用いて、再粘着トルクTref_limを求めることにより、Tref_limが不安定になるという問題を回避することができる。
【0040】
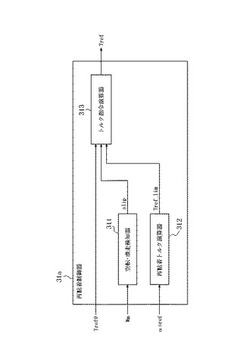
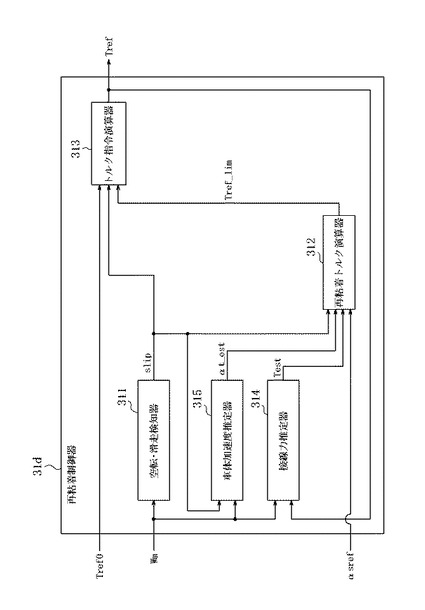
図4は、本発明の電気車制御装置の再粘着制御器の第4実施形態を示すブロック図である。
第4実施形態にかかる再粘着制御器31dは、空転・滑走検出器311と、再粘着トルク演算器312と、トルク指令演算器313と、接線力推定器314と、に加えて、車体加速度推定器315を有する。第4実施形態において、第1〜第3実施形態と同様の構成要素には、同様の符号を付してその説明を省略する。
【0041】
車体加速度推定器315には、主電動機角速度Wmおよび空転検知信号slipが入力される。車体加速度推定器315は、後述するように車体加速度推定値αt_estを求め、出力する。
なお、車体加速度推定器315を用いる代わりに、上述した第2、第3実施形態のように、車体の前後加速度を検出する車体加速度検出器を用いてもよいが、実際の電気車において車体の前後加速度を検出することは困難であるため、車体加速度推定器315を用いることが好ましい。
【0042】
車体加速度推定値αt_estを求めるにあたり、図8(c)の再粘着制御時の車輪周加速度αwと車体加速度αtに着目すると、次のような特徴がみられる。
【0043】
第一の特徴として、空転開始前の状態(t<t0)では車輪周加速度αwと車体加速度αtはほぼ一致していることがあげられる。それゆえ、車輪周加速度αwを車体加速度αtとみなすことが可能である。
【0044】
第二の特徴として、空転が発生しても(t0≦t)車体加速度αtはほとんど変化せず一定であることがあげられる。これは、適切に再粘着制御を行うことができれば、接線力の低下はほとんどないためである。また、電気車は通常複数の電気車制御装置によって駆動されることから、一つの電気車制御装置のトルクが引下げられても車体前後加速度への影響は少ないためである。
【0045】
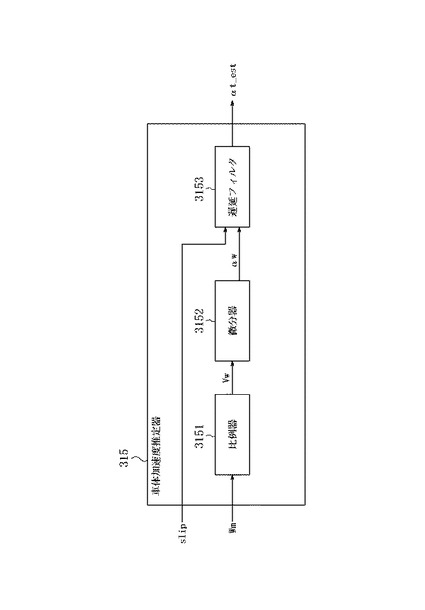
これら二つの特徴から、空転開始前の車輪周加速度αwを車体加速度推定値αt_estとして用いることができる。そこで、車体加速度推定器315は、図5に示す構成とすることができる。すなわち、車体加速度推定器315は、比例器3151と、微分器3152と、遅延フィルタ3153と、を有する。
【0046】
主電動機角速度Wmは、比例器3151によりrw/Rgを積算され車輪周速度Vwに変換される。車輪周速度Vwは、微分器3152により車輪周加速度αwに変換される。遅延フィルタ3153は、空転検知信号slipが入力されると、この車輪周加速度αwを遅延させ車体加速度推定値αt_estを出力する。
なお、遅延フィルタ3153による遅延時間は、空転が開始してから空転を検知するまでに要する時間より長く設定することにより、車体加速度推定値αt_estを空転時の車体加速度αtと一致させることができる。また、空転検知信号slipが入力されると、遅延フィルタ3153の出力が保持されることにより、空転・滑走の影響を防ぐことが可能である。
【0047】
再び、図4を参照すると、再粘着トルク演算器312には、空転検知信号slipと、車体加速度推定値αt_estと、負荷トルクTestと、すべり加速度指令αsref[m/s2]と、が入力される。再粘着トルク演算器312は、(2)式により再粘着トルクTref_lim[N・m]を算出する。
【0048】
【数2】
【0049】
(2)式のように主電動機のトルクを発生すれば、すべり加速度αsをすべり加速度指令αsrefに一致させることができる。以下、この点に関して説明する。
【0050】
ニュートン力学の運動方程式から、回転体の運動は、
慣性モーメント×角加速度=トルク(回転させようとする力)
という関係になる。これを電気車の主電動機から車輪までの回転部を、一つの回転体として置き換えると、主電動機角速度Wm、主電動機4の発生トルクTm、車輪とレール間の摩擦力を主電動機側からみたものをTとすると、
【0051】
【数3】
という関係になる。ここで車輪周速度Vwは、主電動機角速度Wmと車輪径rwと歯車比Rgを用いると、
【0052】
【数4】
という関係になる。速度の微分値が加速度である点と、すべり加速度αsは車輪周加速度αwと車体加速度αtの差であることから、
【0053】
【数5】
と変形でき、これを(3)式に代入すると、
【0054】
【数6】
という方程式が得られる。ここで、変数はαt、αs、Tm、Tの4つであるが、負荷トルクTは車輪・レール間の摩擦力に起因するため直接制御できず、車体加速度αtもその結果なので直接の制御はできない。一方、Tmは主電動機の発生トルクのため直接制御可能である。そのため、Tとαtを把握できれば、主電動機トルクTmにより残ったαsを制御できることがわかる。
上述したとおり、負荷トルクTは、接線力推定器314を用いてTestとして推定可能であり、車体加速度αtは車体加速度推定器315によって車体加速度推定値αt_estとして推定可能である。そこで(6)式のTをTestに、αtをαt_estに置き換えて変形すると、
【0055】
【数7】
という式が得られる。(7)式では、Tmとαs以外は決定しており把握可能なため、αsはTmによって自由に変えられる。そこで、希望するαsをαsrefとして指定すると、主電動機トルクTmが
【0056】
【数8】
となればすべり加速度αsがすべり加速度指令αsrefに一致することがわかる。
そのため、(2)式の構成によりTref_limを決定し、トルク指令演算器・ベクトル制御器・電力変換回路を経由して主電動機の発生トルクTmがTref_limと一致することにより、すべり加速度αsをすべり加速度指令αsrefに一致させることができる。
ここで、すべり加速度指令αsrefを負の値とすることにより、すべり速度Vsを減少させることができるため、確実に再粘着させることが可能である。また、空転・滑走を検知した際のすべり速度Vsを見積もることにより、どの程度の時間で再粘着できるか予測可能であり、トルク指令演算器315がトルクを引き下げる時間を適切に設計できる。
【0057】
本発明の第4実施形態にかかる再粘着制御器31dによれば、すべり加速度指令αsrefを用いた(2)式により、再粘着トルクTref_limを決定し、すべり加速度αsを制御するため、試行錯誤的な調整を行う必要なく、再粘着を確実に実現することができる。
また、車体加速度推定値αt_estを用いることにより、実際の電気車の車体の前後加速度を検出する必要がないため、車体加速度検出器のような追加の装置を設けることなく、再粘着トルクを算出することができる。
【産業上の利用可能性】
【0058】
本発明は電気車の良好な乗り心地を維持しつつ粘着力の有効利用を図った再粘着制御の実現に有効である。
【符号の説明】
【0059】
1 車両
2 主幹制御器
3 電気車制御装置
31 再粘着制御器
311 空転・滑走検知器
312 再粘着トルク演算器
313 トルク指令演算器
314 接線力推定器
315 車体加速度推定器
3151 比例器
3152 微分器
3153 遅延フィルタ
32 ベクトル制御器
33 電力変換回路
34 角速度推定器
4 誘導電動機
5 歯車装置
6 車輪
7 レール
【技術分野】
【0001】
本発明は、電気車の良好な乗り心地を維持しつつ粘着力の有効利用を図った再粘着制御を実現する電気車制御装置に関するものである。
【背景技術】
【0002】
電気車は車輪・レール間の接線力(粘着力ともいう)によって加減速を行っているが、この接線力は、一般にすべり速度に対して図6のすべり速度・接線力係数特性の例を示す特性を有している。この接線力を軸重(車輪1軸当たりのレールに加わる垂直荷重)で割ったものを接線力係数といい、接線力係数の最大値を粘着係数という。図示の如く、接線力の最大値を超えないトルクを主電動機あるいはブレーキ時に主電動機トルクに併せて主電動機に機械的に結合された動軸(以下単に動軸と称する)の空気ブレーキ力とで発生している場合は、空転・滑走を発生せず、接線力の最大値より左側の微小なすべり速度の粘着領域で電気車は走行する。
【0003】
最大値より大きなトルクを発生するとすべり速度は増大し、接線力が低下するのでますますすべり速度が増大する空転・滑走状態になるが、車輪およびレールが乾燥状態では主電動機で発生するトルクあるいはブレーキ時には動軸の空気ブレーキ力と主電動機トルクの合算値は接線力の最大値を超えないように車両の性能が設定されるので、空転・滑走は発生しない。しかし、実線で示すように、レール面が雨などによって湿潤状態にある場合は、粘着係数が低下して接線力の最大値が車両の設定性能に対応したトルクより小さくなる。
【0004】
この場合、すべり速度が増大し空転・滑走状態となり、そのまま放置するとこれに対応して接線力係数が低下し、車両の加速・減速に必要な加減速力がますます低下してしまうので、迅速に空転・滑走を検出し、主電動機が発生するトルクを低減して再粘着させることが必要になる。このようにトルクの制御を行って再粘着させる場合、小さなすべり速度に抑制しつつ、主電動機の発生トルクあるいは動軸の空気ブレーキ力と主電動機発生トルクとの合算値を極力接線力の最大値近傍の値になるように制御することが、電気車の加減速性能を高める上で必要である。
【0005】
図7を用いて一般的な電気車制御装置の構成を説明する。図7は、4台の主電動機4を1台の電気車制御装置3で駆動する場合であるが、各主電動機4に対して個別の電気車制御装置3を用いる場合もある。しかしながら、基本的な制御の考え方はどちらも同一であるためその説明を省略する。
【0006】
主幹制御器2は、運転士の操作に基づき加減速するための元トルク指令値Tref0を出力する。
電気車制御装置3内の再粘着制御器31は、通常は元トルク指令値Tref0をそのままトルク指令値Trefとして出力するが、空転・滑走を検知した際は、再粘着させるために、元トルク指令値Tref0より小さい値をトルク指令値Trefとして出力する。
電気車制御装置3内のベクトル制御器32は、トルク指令値Trefに対応する電圧指令Vを生成する。
電気車制御装置3内の電力変換回路33は、電圧指令Vに対応する電圧を主電動機4に印加する。
電気車制御装置3内の角速度推定器34は、電力変換回路33の出力電圧・電流等から主電動機角速度Wmを推定する。なお、角速度推定器34の代わりに主電動機4に角速度検出器を設け、主電動機角速度を測定する場合もある。
【0007】
次に、図8を用いて、再粘着制御器31の動作について説明する。また、滑走時は軸加速度がマイナスになるが、その絶対値をとりブレーキトルク指令値をプラスの値で扱えば、空転時と同じように扱えるので、以下においては、特に断らない限り、空転の場合を例にとって説明する。
【0008】
トルク指令値Trefがそのときの粘着係数に対応したトルクよりも大きくなると、空転が発生して(t=t0)、図8(b)に示すように、車体速度Vtよりも車輪周速度Vwが急激に増加する。そして、空転を検知し(t=t1)、トルク指令値TrefをTref0からTref_limに引き下げると、車輪周速度Vwが減少して車体速度Vtに一致する(t=t2)。このとき、空転している動輪は再粘着したため、トルク指令値Trefをある値まで短時間(t=t3〜t4)のうちに増大させる。トルク指令値Trefをしばらく一定とした後(t=t4〜t5)、徐々にTref0まで増大させる(t=t6)。以降、t=t1〜t6の動作を繰り返す。
【0009】
ここで、トルク指令値Trefの引き下げ量(ΔT=Tref0−Tref_lim)および引き下げ時間(t2−t1)は、空転している動輪を確実に再粘着させることができる値のトルクとする必要がある。
【0010】
特許文献1では外乱オブザーバ等を用いた接線力係数推定器によって車輪・レール間の接線力を推定し、空転または滑走を検出したときに、前記接線力係数推定値に対応したトルクよりも小さいトルクを指令して空転または滑走状態から再粘着状態に戻した後に、前記接線力係数推定値に対応したトルクを指令するようにした制御器が記載されている。
なお、外乱オブザーバによる接線力推定の方法は、例えば、非特許文献1に記載されている。
【0011】
なお、空転・滑走の検知方法は主電動機の角加速度から検知する方法や、複数の主電動機の回転速度差から検知する手法等がある。(例えば、非特許文献2)
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2002−325307公報
【非特許文献】
【0013】
【非特許文献1】「速度センサレスベクトル制御・外乱オブザーバによる空転再粘着制御の実車両への適用とその評価」電気学会論文誌D、Vol.124(2004)、No.9、pp.909-916
【非特許文献2】「誘導電動機個別駆動方式電気機関車の再粘着制御に関する実験的考察」電気学会論文誌D、Vol.128(2008)、No.1、pp.1-7
【発明の概要】
【発明が解決しようとする課題】
【0014】
従来、トルク指令値Trefの引き下げ量ΔTおよび引き下げ時間をどの程度にすれば動輪を確実に再粘着できるかの把握が困難であった。
引き下げ量が小さすぎたり引き下げ時間が短すぎたりすると動輪の再粘着ができない一方で、引き下げ量が大きすぎたり引き下げ時間が長すぎたりすると加速性や乗り心地の悪化を招く。そのため、試行錯誤的に引き下げ量や引き下げ時間を変化させて調整する必要があり、大変な時間と労力が必要であった。
【0015】
特許文献1に記載の手法の場合、接線力係数推定器に対応したトルクよりも小さいトルクになるように引き下げることにより確実に再粘着できるものの、どの程度引き下げるのが適切か、また引き下げ時間をどの程度にすれば適切か把握するのが困難である。そのため、同様に試行錯誤的な調整する必要があり、大変な時間と労力が必要である。
【0016】
そこで、本発明の目的は、試行錯誤的な調整を行う必要なく、再粘着を確実に実現できる適切なトルク引き下げ量の決定が可能な電気車制御装置を提供することにある。
【課題を解決するための手段】
【0017】
本発明は、電気車両の主電動機を制御する電気車制御装置において、車輪の空転・滑走を検知する空転滑走検知器と、前記車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令に基づいた再粘着トルクを出力する再粘着トルク演算器と、空転・滑走を検知したときには、前記再粘着トルクを出力するトルク指令値演算器と、を有し、前記すべり加速度を制御することを特徴とするものである。
【0018】
本発明では、主電動機角速度と、トルク指令値もしくは演算値と、から車輪の接線力係数を推定する接線力係数推定器をさらに有し、前記再粘着トルク演算器は、前記接線力係数に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することが好ましい。
【0019】
本発明では、前記再粘着トルク演算器は、空転・滑走を検知した時点での接線力係数に基づいた再粘着トルクを出力することが好ましい。
【0020】
本発明では、前記再粘着トルク演算器は、前記電気車両の車体加速度に基づいた再粘着トルクを出力することが好ましい。
【0021】
本発明では、車体の加速度を推定し、車体加速度推定値を出力する車体加速度推定器をさらに有し、前記再粘着トルク演算器は、前記車体加速度推定値に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することが好ましい。
【0022】
本発明では、前記車体加速度推定値は、主電動機角速度から変換された車輪周加速度を遅延させて得られることが好ましい。
【発明の効果】
【0023】
本発明によれば、試行錯誤的な調整をしなくても、再粘着を確実に実現できる適切なトルク引き下げ量の決定が可能である。
【図面の簡単な説明】
【0024】
【図1】本発明の電気車制御装置の再粘着制御器の第1実施形態を示すブロック図である。
【図2】本発明の電気車制御装置の再粘着制御器の第2実施形態を示すブロック図である。
【図3】本発明の電気車制御装置の再粘着制御器の第3実施形態を示すブロック図である。
【図4】本発明の電気車制御装置の再粘着制御器の第4実施形態を示すブロック図である。
【図5】車体加速度推定器の一例を示すブロック図である。
【図6】すべり速度・接線力係数特性の一例である。
【図7】従来の技術による電気車制御装置の一例である。
【図8】再粘着制御時の挙動を説明する図である。
【発明を実施するための形態】
【0025】
以下、図面を参照して、本発明の電気車制御装置の実施形態を詳細に説明する。
【0026】
図1は、本発明の電気車制御装置の再粘着制御器の第1実施形態を示すブロック図である。電気車制御装置の再粘着制御以外の構成要素は、上述した従来例と同様であるため、その説明を省略する。
第1実施形態にかかる再粘着制御器31aは、空転・滑走検出器311と、再粘着トルク演算器312と、トルク指令演算器313と、を有する。
【0027】
空転・滑走検出器311には、主電動機角速度推定器(図示せず)が検出した主電動機角速度Wmが入力される。空転・滑走検出器311は、主電動機角速度Wmが所定の閾値を超えると、空転・滑走の発生を検知し、空転検知信号slipを出力する。また、空転・滑走検知器311は、主電動機角速度Wmが所定の閾値以下になると、空転検知信号slipの出力を停止する。
なお、空転・滑走検知器311は、非特許文献1のように他の手法を用いて空転・滑走を検知しても構わない。
【0028】
再粘着トルク演算器312には、すべり加速度指令αsrefが入力される。再粘着トルク演算器312は、すべり加速度指令αsrefに基づいて、再粘着トルクTref_limを算出する。
すべり加速度指令αsrefとは、希望するすべり加速度αsのことであり、すべり加速度αsは、すべり速度Vsの微分値、すなわち、図8(b)に示す車輪周速度Vwの傾きである。
【0029】
トルク指令演算器313には、元トルク指令値Tref0と、空転検知信号slipと、再粘着トルクTref_limとが入力される。トルク指令演算器313は、通常は、入力された元トルク指令値Tref0をそのままトルク指令値Trefとして出力するが、空転検知信号slipが入力されると、再粘着トルクTref_limをトルク指令値Trefとして一定時間(例えば、空転検知信号slipが入力されている間)出力する。
【0030】
本発明の第1実施形態にかかる再粘着制御器31aによれば、すべり加速度指令αsrefに基づいて、再粘着トルクTref_limを決定し、すべり加速度αsを制御するため、試行錯誤的な調整を行う必要なく、再粘着を確実に実現することができる。
【0031】
図2は、本発明の電気車制御装置の再粘着制御器の第2実施形態を示すブロック図である。
第2実施形態にかかる再粘着制御器31bは、空転・滑走検出器311と、再粘着トルク演算器312と、トルク指令演算器313と、に加えて、接線力推定器314を有する。第2実施形態において、第1実施形態と同様の構成要素には、同様の符号を付してその説明を省略する。
【0032】
接線力推定器314には、主電動機角速度Wmおよびトルク指令値Trefが入力される。接線力推定器314は、主電動機角速度Wmおよびトルク指令値Trefから、外乱オブザーバ等を用いて、車輪・レール間の接線力を主電動機側からみたものである負荷トルクTestを推定し、出力する。
なお、接線力推定器314による負荷トルクTestの推定方法は、従来技術と同様であるので、その説明を省略する。
また、接線力推定器314は、トルク指令値Trefを用いる代わりに、電流検出器を用いた主電動機トルクの演算値を用いることもできる。
【0033】
再粘着トルク演算器312には、負荷トルクTestと、すべり加速度指令αsref[m/s2]と、車体加速度検出器(図示せず)により検出された車体加速度αt[m/s2]が入力される。再粘着トルク演算器312は、(1)式により再粘着トルクTref_lim[N・m]を算出する。
【0034】
【数1】
【0035】
ここで、Rgは歯車比(主電動機の回転数/車輪の回転数)、rw[m]は車輪径、J[kg・m]は主電動機からみた主電動機・歯車装置・車軸・車輪の等価慣性モーメントである。
(1)式は、すべり加速度指令αsrefによって、空転を抑えるために必要なトルクの引き下げ量を任意に決定し、すべり加速度αsを制御可能なことを示している。
【0036】
本発明の第2実施形態にかかる再粘着制御器31bによれば、すべり加速度指令αsrefを用いた(1)式により、再粘着トルクTref_limを決定し、すべり加速度αsを制御するため、試行錯誤的な調整を行う必要なく、再粘着を確実に実現することができる。
さらに、外乱オブザーバ等を用いて、負荷トルクTestを推定することにより、レール面が乾燥状態にあるか、あるいは、雨などによって湿潤状態にあるかによって異なる接線力に対応でき、より正確な再粘着トルクを算出することができる。
【0037】
図3は、本発明の電気車制御装置の再粘着制御器の第3実施形態を示すブロック図である。
第3実施形態にかかる再粘着制御器31cは、再粘着トルク演算器312に空転検知信号slipが入力されている点以外、第2実施形態にかかる再粘着制御器31bと同様であるため、同様の構成要素には、同様の符号を付してその説明を省略する。
【0038】
再粘着トルク演算器312は、空転検知信号slipが入力された時点に入力された負荷トルクTestを保持して、再粘着トルクTref_limとして出力する。
上述した第2実施形態では、再粘着トルク演算器312は、負荷トルクTestの瞬時値を用いて、すなわち、リアルタイムに再粘着トルクTref_limを演算していた。しかしながら、接線力推定器314が出力する負荷トルクTestは、電気車の歯車・駆動装置等や台車の振動により微小に変化しており、このように微小に変化している負荷トルクTestを用いると、再粘着トルクTref_limが不安定になるおそれがある。
【0039】
本発明の第3実施形態にかかる再粘着制御器31cによれば、空転検知信号slipが入力された時点に入力された負荷トルクTestを用いて、再粘着トルクTref_limを求めることにより、Tref_limが不安定になるという問題を回避することができる。
【0040】
図4は、本発明の電気車制御装置の再粘着制御器の第4実施形態を示すブロック図である。
第4実施形態にかかる再粘着制御器31dは、空転・滑走検出器311と、再粘着トルク演算器312と、トルク指令演算器313と、接線力推定器314と、に加えて、車体加速度推定器315を有する。第4実施形態において、第1〜第3実施形態と同様の構成要素には、同様の符号を付してその説明を省略する。
【0041】
車体加速度推定器315には、主電動機角速度Wmおよび空転検知信号slipが入力される。車体加速度推定器315は、後述するように車体加速度推定値αt_estを求め、出力する。
なお、車体加速度推定器315を用いる代わりに、上述した第2、第3実施形態のように、車体の前後加速度を検出する車体加速度検出器を用いてもよいが、実際の電気車において車体の前後加速度を検出することは困難であるため、車体加速度推定器315を用いることが好ましい。
【0042】
車体加速度推定値αt_estを求めるにあたり、図8(c)の再粘着制御時の車輪周加速度αwと車体加速度αtに着目すると、次のような特徴がみられる。
【0043】
第一の特徴として、空転開始前の状態(t<t0)では車輪周加速度αwと車体加速度αtはほぼ一致していることがあげられる。それゆえ、車輪周加速度αwを車体加速度αtとみなすことが可能である。
【0044】
第二の特徴として、空転が発生しても(t0≦t)車体加速度αtはほとんど変化せず一定であることがあげられる。これは、適切に再粘着制御を行うことができれば、接線力の低下はほとんどないためである。また、電気車は通常複数の電気車制御装置によって駆動されることから、一つの電気車制御装置のトルクが引下げられても車体前後加速度への影響は少ないためである。
【0045】
これら二つの特徴から、空転開始前の車輪周加速度αwを車体加速度推定値αt_estとして用いることができる。そこで、車体加速度推定器315は、図5に示す構成とすることができる。すなわち、車体加速度推定器315は、比例器3151と、微分器3152と、遅延フィルタ3153と、を有する。
【0046】
主電動機角速度Wmは、比例器3151によりrw/Rgを積算され車輪周速度Vwに変換される。車輪周速度Vwは、微分器3152により車輪周加速度αwに変換される。遅延フィルタ3153は、空転検知信号slipが入力されると、この車輪周加速度αwを遅延させ車体加速度推定値αt_estを出力する。
なお、遅延フィルタ3153による遅延時間は、空転が開始してから空転を検知するまでに要する時間より長く設定することにより、車体加速度推定値αt_estを空転時の車体加速度αtと一致させることができる。また、空転検知信号slipが入力されると、遅延フィルタ3153の出力が保持されることにより、空転・滑走の影響を防ぐことが可能である。
【0047】
再び、図4を参照すると、再粘着トルク演算器312には、空転検知信号slipと、車体加速度推定値αt_estと、負荷トルクTestと、すべり加速度指令αsref[m/s2]と、が入力される。再粘着トルク演算器312は、(2)式により再粘着トルクTref_lim[N・m]を算出する。
【0048】
【数2】
【0049】
(2)式のように主電動機のトルクを発生すれば、すべり加速度αsをすべり加速度指令αsrefに一致させることができる。以下、この点に関して説明する。
【0050】
ニュートン力学の運動方程式から、回転体の運動は、
慣性モーメント×角加速度=トルク(回転させようとする力)
という関係になる。これを電気車の主電動機から車輪までの回転部を、一つの回転体として置き換えると、主電動機角速度Wm、主電動機4の発生トルクTm、車輪とレール間の摩擦力を主電動機側からみたものをTとすると、
【0051】
【数3】
という関係になる。ここで車輪周速度Vwは、主電動機角速度Wmと車輪径rwと歯車比Rgを用いると、
【0052】
【数4】
という関係になる。速度の微分値が加速度である点と、すべり加速度αsは車輪周加速度αwと車体加速度αtの差であることから、
【0053】
【数5】
と変形でき、これを(3)式に代入すると、
【0054】
【数6】
という方程式が得られる。ここで、変数はαt、αs、Tm、Tの4つであるが、負荷トルクTは車輪・レール間の摩擦力に起因するため直接制御できず、車体加速度αtもその結果なので直接の制御はできない。一方、Tmは主電動機の発生トルクのため直接制御可能である。そのため、Tとαtを把握できれば、主電動機トルクTmにより残ったαsを制御できることがわかる。
上述したとおり、負荷トルクTは、接線力推定器314を用いてTestとして推定可能であり、車体加速度αtは車体加速度推定器315によって車体加速度推定値αt_estとして推定可能である。そこで(6)式のTをTestに、αtをαt_estに置き換えて変形すると、
【0055】
【数7】
という式が得られる。(7)式では、Tmとαs以外は決定しており把握可能なため、αsはTmによって自由に変えられる。そこで、希望するαsをαsrefとして指定すると、主電動機トルクTmが
【0056】
【数8】
となればすべり加速度αsがすべり加速度指令αsrefに一致することがわかる。
そのため、(2)式の構成によりTref_limを決定し、トルク指令演算器・ベクトル制御器・電力変換回路を経由して主電動機の発生トルクTmがTref_limと一致することにより、すべり加速度αsをすべり加速度指令αsrefに一致させることができる。
ここで、すべり加速度指令αsrefを負の値とすることにより、すべり速度Vsを減少させることができるため、確実に再粘着させることが可能である。また、空転・滑走を検知した際のすべり速度Vsを見積もることにより、どの程度の時間で再粘着できるか予測可能であり、トルク指令演算器315がトルクを引き下げる時間を適切に設計できる。
【0057】
本発明の第4実施形態にかかる再粘着制御器31dによれば、すべり加速度指令αsrefを用いた(2)式により、再粘着トルクTref_limを決定し、すべり加速度αsを制御するため、試行錯誤的な調整を行う必要なく、再粘着を確実に実現することができる。
また、車体加速度推定値αt_estを用いることにより、実際の電気車の車体の前後加速度を検出する必要がないため、車体加速度検出器のような追加の装置を設けることなく、再粘着トルクを算出することができる。
【産業上の利用可能性】
【0058】
本発明は電気車の良好な乗り心地を維持しつつ粘着力の有効利用を図った再粘着制御の実現に有効である。
【符号の説明】
【0059】
1 車両
2 主幹制御器
3 電気車制御装置
31 再粘着制御器
311 空転・滑走検知器
312 再粘着トルク演算器
313 トルク指令演算器
314 接線力推定器
315 車体加速度推定器
3151 比例器
3152 微分器
3153 遅延フィルタ
32 ベクトル制御器
33 電力変換回路
34 角速度推定器
4 誘導電動機
5 歯車装置
6 車輪
7 レール
【特許請求の範囲】
【請求項1】
電気車両の主電動機を制御する電気車制御装置において、
車輪の空転・滑走を検知する空転滑走検知器と、
前記車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令に基づいた再粘着トルクを出力する再粘着トルク演算器と、
空転・滑走を検知したときには、前記再粘着トルクを出力するトルク指令値演算器と、
を有し、
前記すべり加速度を制御することを特徴とする電気車制御装置。
【請求項2】
主電動機角速度と、トルク指令値もしくは演算値と、から車輪の接線力係数を推定する接線力係数推定器をさらに有し、
前記再粘着トルク演算器は、前記接線力係数に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することを特徴とする請求項1に記載の電気車制御装置。
【請求項3】
前記再粘着トルク演算器は、空転・滑走を検知した時点での接線力係数に基づいた再粘着トルクを出力することを特徴とする請求項2に記載の電気車制御装置。
【請求項4】
前記再粘着トルク演算器は、前記電気車両の車体加速度に基づいた再粘着トルクを出力することを特徴とする請求項1〜3のいずれかに記載の電気車制御装置。
【請求項5】
車体の加速度を推定し、車体加速度推定値を出力する車体加速度推定器をさらに有し、
前記再粘着トルク演算器は、前記車体加速度推定値に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することを特徴とする請求項1〜3のいずれかに記載の電気車制御装置。
【請求項6】
前記車体加速度推定値は、主電動機角速度から変換された車輪周加速度を遅延させて得られることを特徴とする請求項5に記載の電気車制御装置。
【請求項1】
電気車両の主電動機を制御する電気車制御装置において、
車輪の空転・滑走を検知する空転滑走検知器と、
前記車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令に基づいた再粘着トルクを出力する再粘着トルク演算器と、
空転・滑走を検知したときには、前記再粘着トルクを出力するトルク指令値演算器と、
を有し、
前記すべり加速度を制御することを特徴とする電気車制御装置。
【請求項2】
主電動機角速度と、トルク指令値もしくは演算値と、から車輪の接線力係数を推定する接線力係数推定器をさらに有し、
前記再粘着トルク演算器は、前記接線力係数に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することを特徴とする請求項1に記載の電気車制御装置。
【請求項3】
前記再粘着トルク演算器は、空転・滑走を検知した時点での接線力係数に基づいた再粘着トルクを出力することを特徴とする請求項2に記載の電気車制御装置。
【請求項4】
前記再粘着トルク演算器は、前記電気車両の車体加速度に基づいた再粘着トルクを出力することを特徴とする請求項1〜3のいずれかに記載の電気車制御装置。
【請求項5】
車体の加速度を推定し、車体加速度推定値を出力する車体加速度推定器をさらに有し、
前記再粘着トルク演算器は、前記車体加速度推定値に基づいた再粘着トルクを出力し、前記すべり加速度を前記すべり加速度指令に一致させるように制御することを特徴とする請求項1〜3のいずれかに記載の電気車制御装置。
【請求項6】
前記車体加速度推定値は、主電動機角速度から変換された車輪周加速度を遅延させて得られることを特徴とする請求項5に記載の電気車制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−102613(P2013−102613A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244884(P2011−244884)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000003115)東洋電機製造株式会社 (380)
【出願人】(304021288)国立大学法人長岡技術科学大学 (458)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000003115)東洋電機製造株式会社 (380)
【出願人】(304021288)国立大学法人長岡技術科学大学 (458)
【Fターム(参考)】
[ Back to top ]