
電車線路用監視システム
【課題】 大がかりな装置を設けることなく、監視対象設備の変位を推定することにより電車線路設備の総合的な監視を簡単で正確に、低コストで行う。
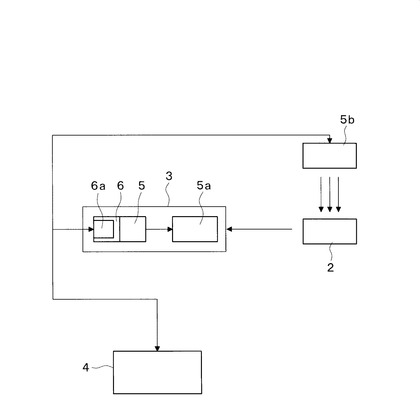
【解決手段】 電車線路用監視システム1は、監視対象に取り付けられる無線タグ2と、この無線タグ2が発した信号を受けて受信時刻を取得する測定ユニット3と、測定ユニット3からの受信時刻を演算処理して無線タグ2の取付位置を推定するロケーションサーバ4とで構成する。測定ユニット3は、無線タグ2の信号を受ける受信アンテナ5aを備えたタグリーダ5と、信号の受信時刻を内蔵の時計6aで記録する測定器6とを一組とする、各受信アンテナ5aが互いに異なる位置に配置された四組を備える。ロケーションサーバ4は、各測定器6からの時刻情報を受けて、各受信アンテナ5aでの受信時刻の時間差に信号の伝播速度を乗じて無線タグ2から各受信アンテナ5aまで距離の差を算出し、無線タグ2の位置を推定する。
【解決手段】 電車線路用監視システム1は、監視対象に取り付けられる無線タグ2と、この無線タグ2が発した信号を受けて受信時刻を取得する測定ユニット3と、測定ユニット3からの受信時刻を演算処理して無線タグ2の取付位置を推定するロケーションサーバ4とで構成する。測定ユニット3は、無線タグ2の信号を受ける受信アンテナ5aを備えたタグリーダ5と、信号の受信時刻を内蔵の時計6aで記録する測定器6とを一組とする、各受信アンテナ5aが互いに異なる位置に配置された四組を備える。ロケーションサーバ4は、各測定器6からの時刻情報を受けて、各受信アンテナ5aでの受信時刻の時間差に信号の伝播速度を乗じて無線タグ2から各受信アンテナ5aまで距離の差を算出し、無線タグ2の位置を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、識別情報を電波で発信可能な無線タグを電車線路設備に取り付けて、タグリーダにより受信し、無線タグの取付位置を特定して電車線路設備の変位に基づいて設備を監視する電車線路用監視システムに関するものである。
【背景技術】
【0002】
従来、電車線路設備内の対象設備に、対象設備を特定する設備ID及び監視情報を読み書き可能なIDタグと共に、対象設備の状態を検出するセンサを取り付け、制御部によりセンサが検出した監視情報をIDタグに書き込み、IDタグから設備IDと共に監視情報をIDタグリーダで読み取って、電車線路設備の監視に活用する電車線路用監視システムがある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006-131173号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来のシステムにおいては、対象設備ごとにその状態を検出するセンサやIDタグにその検出情報分のメモリを必要とするので、ハード面の小型化や費用の低廉化の障害ととなるし、また情報解析の処理負担が大きく部材それぞれに電力を確保しなければならない。
そこで、本発明は、電車線路設備に大がかりな装置を設けることなく、無線タグの信号から監視対象設備の位置や変位を推定することにより電車線路設備の総合的な監視を簡単で正確に、低コストで行える電車線路用監視システムを提供することを課題としている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明においては、信号出力可能な無線タグを電車線路設備内の監視対象設備に取り付け、この無線タグの信号をタグリーダの複数の受信アンテナにより互いに異なる位置で受信し、各受信アンテナが受信した信号の受信時刻を基に制御装置が無線タグの取付位置を算出して特定し、対象設備の規定位置からの変位を推定して、対象設備の変位状態を監視する電車線路用監視システムを構成した。
相対変位を伴う部材を備えた対象設備の各部材に無線タグを取り付け、これらの無線タグの取付位置を制御装置で算出して特定し、対象設備の部材間の相対変位を推定することとした。
【発明の効果】
【0006】
本発明においては、電車線路の監視対象設備の位置を無線タグの信号から取得できるし、対象設備の変位から設備の状態を把握することができるので、対象設備の位置を検出したりその変位を検出するためのセンサ及びそのセンサに検出される位置情報を記録するメモリをシステムから省くことができ、電車線路全体の総合的な監視を簡単で正確に低コストで行うことができるという効果を有する。
【図面の簡単な説明】
【0007】
【図1】本発明の第1実施形態に係る電車線路用監視システムのブロック図である。
【図2】電車線路用監視システムの第1変形例のブロック図である。
【図3】電車線路用監視システムの第2変形例のブロック図である。
【図4】電車線路用監視システムの第3変形例のブロック図である。
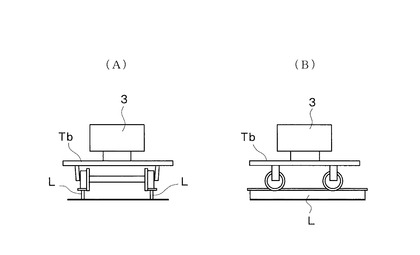
【図5】(A)は図1の電車線路用監視システムの測定ユニットを搭載する軌道台車の概略的正面図、(B)は同じく概略的側面である。
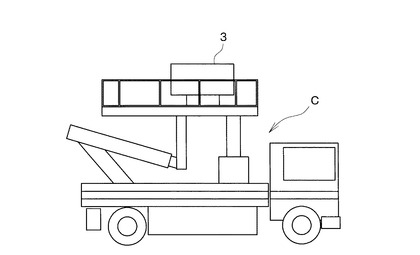
【図6】第2実施形態に係る電車線路用監視システムの測定ユニットを搭載する保守用作業車の概略図である。
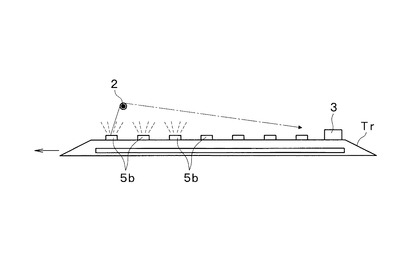
【図7】第3実施形態に係る電車線路用監視システムの測定ユニットを搭載する電車車両の概略図である。
【図8】第4実施形態に係る電車線路用監視システムの測定ユニットを搭載する電車車両の概略図である。
【図9】第5実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図10】第6実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図11】第7実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図12】第8実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図13】第9実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図14】第10実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図15】第11実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図16】第12実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図17】第13実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【発明を実施するための形態】
【0008】
本発明の実施の一形態を図面を参照して説明する。
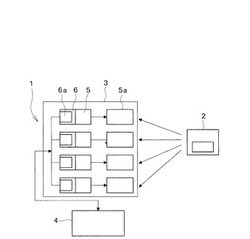
図1において、電車線路用監視システム1は、監視対象設備に取り付けられる無線タグ2と、この無線タグ2が発した信号を受信して受信時刻を取得する測定ユニット3と、測定ユニット3からの受信時刻データを演算処理して無線タグ2の取付位置及び監視対象設備の変位を推定する制御装置であるロケーションサーバ4とで構成される。測定ユニット3は、無線タグ2が発する信号を受信する受信アンテナ5aを備えたタグリーダ5と、タグリーダ5が一体的に組み込まれ無線タグ2の信号の受信時刻を内蔵の時計6aで記録する測定器6とを一組とする、各受信アンテナ5aが互いに異なる位置に配置された四組を備えている。
この電車線路用監視システム1の監視対象設備を電車線路近辺の設備とする場合、図5に示すように、線路L上を移動可能な軌道台車Tbに測定ユニット3を搭載し、軌道台車Tbを線路上で移動させて測定地点で停止させてから、監視処理を実行する。すなわち、測定地点で無線タグ2からの信号を各受信アンテナ5aを通じてタグリーダ5で受け、信号が到着する時刻を測定器6が測定する。ロケーションサーバ4は、各測定器6からの時刻情報を受けて、各受信アンテナ5aでの受信時刻の時間差に信号の伝播速度を乗じて無線タグ2から各受信アンテナ5aまで距離の差を算出し、無線タグ2の位置を推定する到達時間差法(TDoA)により、無線タグ2の取付位置を推定する。なお、ロケーションサーバ4は測定器6の時刻情報を解析するものであるから、測定器6と一体的に軌道台車Tbに搭載されていなくてもよい。無線タグ2の取付位置に基づいて対象設備の位置が推定され、その変位が規定の許容範囲を越える場合には、電車線路用監視システムを含む電車線路設備監視システムが警報を発する等の必要な対応動作を行う。また、これらの情報は区所等の保全管理システムに保全情報として送られ有効活用される。
なお、軌道台車Tb上の各タグリーダ5のアンテナ5aの固定位置は予め既知であり、また各測定器3の時計は時刻同期していることを前提とする。
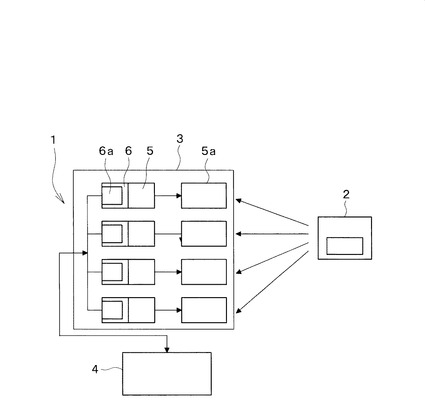
また、無線タグ2は、アクティブ型のほか、パッシブ型又はセミパッシブ型を適用できる。パッシブ型及びセミパッシブ型を適用する場合には、図2に示すように、無線タグ2の送信起電用の給電アンテナ5bを備える。
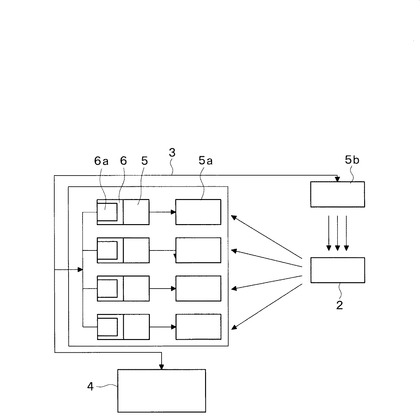
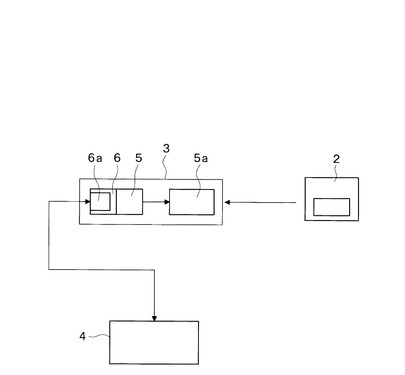
さらに、測定ユニット3は、四組のタグリーダ5及び測定器6に代えて、4個以上の受信アンテナ素子から構成されるアレイアンテナを備えた単一のタグリーダと単一の測定器6から構成してもよい。この場合、図3,図4に示すように、無線タグ2から発せられる信号に対して、タグリーダ5の受信アレイアンテナ5aの各アンテナ素子に到着する時刻が測定器6で測定される。
ロケーションサーバ4においては、無線タグ2の取付位置の推定に関して上記実施形態における到達時間差法(TDoA)のほか、各アンテナが受信した電波の位相差に基づき、各アンテナの位置から共通の特定方向を基準とする信号の伝播方向を検出する到達角度法(AoA)等の各種位置検出法を採用できる。特にタグリーダ5にアレイアンテナを適用する場合には、信号の位相差の検出に有効なため、到達角度法(AoA)が適する。
無線タグ2の信号は位置検出のために利用されるが、これに加えて、例えば温度センサによる温度などの位置検出以外の状態検出用の各種センサによるセンシングデータを同時に送ることに利用してもよい。
これらの実施例の変更は、以下の実施形態においても同様に適用できる。
【0009】
第2実施形態に係る電車線路用監視システム1は、図6に示すように、測定ユニット3が保守用作業車Cに搭載されている。保守用作業車Cは、線路上を走行可能で、所定の測定地点に移動したら、停止しあるいは走行しながら、先と同様にしてタグリーダ5が無線タグ2の信号を受信し、測定器6が信号の到着時刻を測定し、ロケーションサーバ4が各測定器6からの時刻情報を受けて、到達時間差法(TDoA)により、無線タグ2の取付位置を推定する。
【0010】
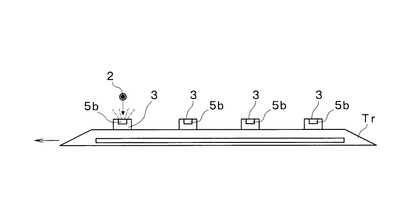
第3実施形態に係る電車線路用監視システム1は、図7に示すように、測定ユニット3が営業運行中の電車Trに搭載され、無線タグ2にパッシブ型又はセミパッシブ型を適用する。無線タグ2の送信起電用の給電アンテナ5bは、無線タグ2に信号を送信させるのに必要な電力をまかなうために電車Trの車両上に固定される。高速走行する電車Trの場合には、長時間起電し十分な読み取り時間を確保するため、複数の給電アンテナ5bを設ける。通常運行時間中に電車Trを走行させながら、給電アンテナ5bにより無線タグ2を送信起電しつつ各タグリーダ5が無線タグ2の信号を受信し、各測定器6が信号の到着時刻を測定し、ロケーションサーバ4が各測定器6からの時刻情報を受けて、到達時間差法(TDoA)により、無線タグ2の取付位置を推定する。
【0011】
第4実施形態に係る電車線路用監視システム1は、図2に示すように、給電アンテナ5bを含む測定ユニット3が営業運行中の電車Trに前後に異なる位置に複数搭載されている。従って、一の無線タグ2を複数回測定することになり、信号の読み取り不良による誤測定の可能性を低減できる。
なお、第3,第4実施形態では測定ユニット3を電車Trに搭載して営業運行中に無線タグ2の信号を読み取ることとしたが、これに代えて検測車に搭載して営業運行時間外に測定作業を行うこととしてもよい。
【0012】
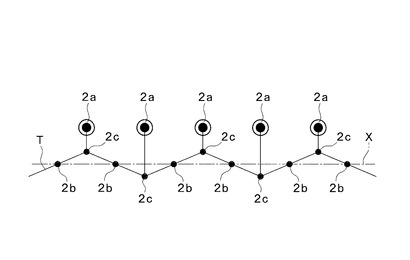
第5実施形態に係る電車線路用監視システム1は、図9に示すように、トロリ線Tを監視対象設備としている。電車線路用監視システム1は、トロリ線Tが支持される支柱に第1無線タグ2aが取り付けられ、トロリ線Tの径間中央位置に第2無線タグ2bが取り付けられ、さらにトロリ線Tを支柱に支持する支持部材の支持点に第3無線タグ2cが取り付けられる。各無線タグ2a,2b,2cの信号を、図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2b,2cの取付位置を推定する。無線タグ2の取付位置に基づいて線路間中心位置Xを基準とするトロリ線Tの水平方向の偏位や高さが推定される。さらに、営業運行時の電車通過時のパンタグラフによるトロリ線の押し上げ高さが推定される。このようなトロリ線Tの偏位、高さ及びパンタグラフの押し上げ高さが規定の許容範囲を越える場合には、電車線路用監視システムを含む電車線路設備監視システムが警報を発する等の必要な対応動作を行う。また、電車線、電柱及びその支持点並びに軌道中心Xからの偏位を表した電車線線路平面図の作成に利用される。
【0013】
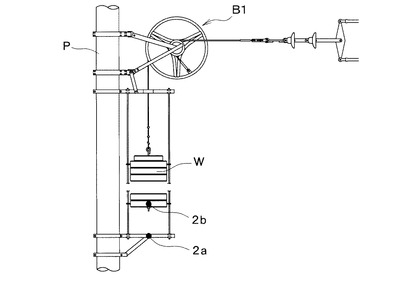
第6実施形態に係る電車線路用監視システム1は、図10に示すように、トロリ線の張力を一定に維持するために支柱Pに設けられた滑車式テンションバランサB1を監視対象設備としている。電車線路用監視システム1は、トロリ線にテンションを付与するための重錘Wの上下変位をガイドするガイド部材の下端位置に第1無線タグ2aが取り付けられると共に、重錘Wの下端位置に第2無線タグ2bが取り付けられ、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、重錘Wの変位が規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0014】
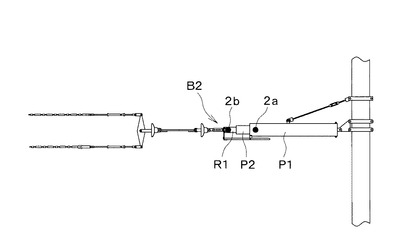
第7実施形態に係る電車線路用監視システム1は、図11に示すように、トロリ線の張力を適切に維持するために支柱に引き留められるばね式テンションバランサB2を監視対象設備とするものである。ばね式テンションバランサB2は、支柱に結合される外筒内に、中筒及びロッドを内外三重に入れ子式に組み込み、外筒P1と中筒P2との間及び中筒P2とロッドR1との間に夫々ばねを介設して、ロッドRの先端を電車線に接続する。電車線路用監視システム1は、外筒P1に第1無線タグ2aを取り付け、ロッドR1に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、外筒P1に対するロッドR1の変位が規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0015】
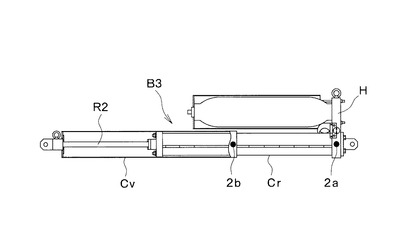
第8実施形態に係る電車線路用監視システム1は、図12に示すように、トロリ線の張力を適切に維持するために支柱に引き留められたガス式テンションバランサB3を監視対象設備とするものである。ガス式テンションバランサB3は、支柱に固定されるシリンダCr内にロッドR2が出入り自在に挿入され、ロッドR2にトロリ線が接続され、シリンダCr内をロッドR2が出入りすることで、シリンダCr内の高圧ガスが圧縮され、この圧力をトロリ線の張力に作用させるものである。電車線路用監視システム1は、シリンダCrが固定されるホルダHに第1無線タグ2aを取り付けると共に、ロッドR2に固定されたカバーCvに第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、ホルダHに対するカバーCvの変位を算出し、規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0016】
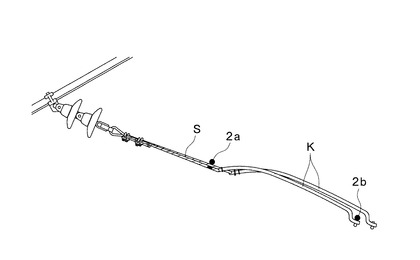
第9実施形態に係る電車線路用監視システム1は、図13に示すように、トロリ線を側方の支持部材に引止める曲線引金具Kを監視対象設備とする。曲線引金具Kは、側方の構造物から支持部材Sを介して線路上に延出し、先端のイヤーでトロリT線を支持する。この電車線路用監視システム1は、支持部材Sの端部に第1無線タグ2aを取り付けると共に、曲線引金具Kの先端部上に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、曲線引金具Kの傾斜角を算出し、規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0017】
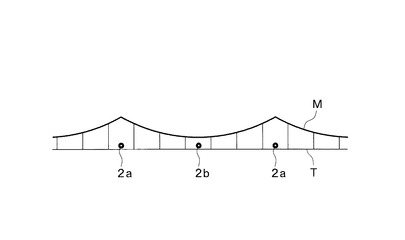
第10実施形態に係る電車線路用監視システム1は、図14に示すように、トロリ線を監視対象設備とするものである。この電車線路用監視システム1は、張架線の支持点に対応するトロリ線Tの位置に第1無線タグ2aを取り付け、各径間中央点に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいて、トロリ線Tの各部の高さを算出し、規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0018】
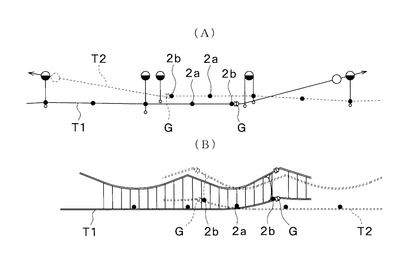
第11実施形態に係る電車線路用監視システム1は、図15に示すように、二つの電車線のオーバーラップ部のトロリ線を監視対象設備とするものである。この電車線路用監視システム1は、電車線の移行点に対応するトロリ線Tの位置に第1無線タグ2aを取り付け、引上げたトロリ線TのがいしG付近に第2無線タグ2aを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいて電車線のオーバーラップ部の間隔を算出し、規定の許容範囲を越えた接近があれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0019】
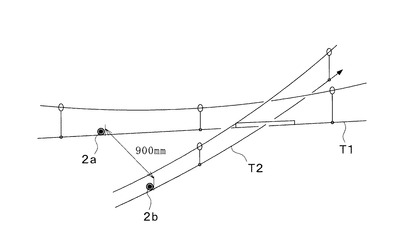
第12実施形態に係る電車線路用監視システム1は、図16に示すように、本線とこれに交差するわたり線とのトロリ線を監視対象設備とするものである。この電車線路用監視システム1は、本線とわたり線との間隔が900mmとなる位置における本線のトロリ線T1に第1無線タグ2aを取り付け、当該位置におけるわたり線のトロリ線T2に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいてトロリ線相互の高低差を算出し、規定の許容範囲を越えた変動があれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0020】
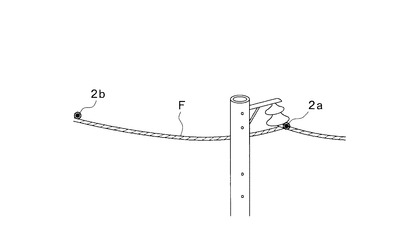
第13実施形態に係る電車線路用監視システム1は、図17に示すように、き電線Fを対象設備とするものである。電車線路用監視システム1は、き電線Fの各支持点に第1無線タグ2aを取り付け、各径間中央点に第2無線タグ2bを取り付け、これらの無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいて、き電線の各径間の弛みを算出し、規定の許容範囲を越えた変動があれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【符号の説明】
【0021】
1 電車線路用監視システム
2 無線タグ
2a 第1無線タグ
2b 第2無線タグ
2c 第3無線タグ
3 測定ユニット
4 ロケーションサーバ
5 タグリーダ
5a 受信アンテナ
5b 給電アンテナ
6 測定器
6a 時計
Tb 軌道台車
L レール
C 保守用作業車
B1 滑車式テンションバランサ
P 支柱
W 重錘
B2 ばね式テンションバランサ
P1 外筒
R1 ロッド
B3 ガス式テンションバランサ
Cr シリンダ
R2 ロッド
Cv カバー
H ホルダ
K 曲線引金具
S 支持部材
T トロリ線
T1 トロリ線
T2 トロリ線
M ちょう架線
G がいし
F き電線
【技術分野】
【0001】
本発明は、識別情報を電波で発信可能な無線タグを電車線路設備に取り付けて、タグリーダにより受信し、無線タグの取付位置を特定して電車線路設備の変位に基づいて設備を監視する電車線路用監視システムに関するものである。
【背景技術】
【0002】
従来、電車線路設備内の対象設備に、対象設備を特定する設備ID及び監視情報を読み書き可能なIDタグと共に、対象設備の状態を検出するセンサを取り付け、制御部によりセンサが検出した監視情報をIDタグに書き込み、IDタグから設備IDと共に監視情報をIDタグリーダで読み取って、電車線路設備の監視に活用する電車線路用監視システムがある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006-131173号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来のシステムにおいては、対象設備ごとにその状態を検出するセンサやIDタグにその検出情報分のメモリを必要とするので、ハード面の小型化や費用の低廉化の障害ととなるし、また情報解析の処理負担が大きく部材それぞれに電力を確保しなければならない。
そこで、本発明は、電車線路設備に大がかりな装置を設けることなく、無線タグの信号から監視対象設備の位置や変位を推定することにより電車線路設備の総合的な監視を簡単で正確に、低コストで行える電車線路用監視システムを提供することを課題としている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明においては、信号出力可能な無線タグを電車線路設備内の監視対象設備に取り付け、この無線タグの信号をタグリーダの複数の受信アンテナにより互いに異なる位置で受信し、各受信アンテナが受信した信号の受信時刻を基に制御装置が無線タグの取付位置を算出して特定し、対象設備の規定位置からの変位を推定して、対象設備の変位状態を監視する電車線路用監視システムを構成した。
相対変位を伴う部材を備えた対象設備の各部材に無線タグを取り付け、これらの無線タグの取付位置を制御装置で算出して特定し、対象設備の部材間の相対変位を推定することとした。
【発明の効果】
【0006】
本発明においては、電車線路の監視対象設備の位置を無線タグの信号から取得できるし、対象設備の変位から設備の状態を把握することができるので、対象設備の位置を検出したりその変位を検出するためのセンサ及びそのセンサに検出される位置情報を記録するメモリをシステムから省くことができ、電車線路全体の総合的な監視を簡単で正確に低コストで行うことができるという効果を有する。
【図面の簡単な説明】
【0007】
【図1】本発明の第1実施形態に係る電車線路用監視システムのブロック図である。
【図2】電車線路用監視システムの第1変形例のブロック図である。
【図3】電車線路用監視システムの第2変形例のブロック図である。
【図4】電車線路用監視システムの第3変形例のブロック図である。
【図5】(A)は図1の電車線路用監視システムの測定ユニットを搭載する軌道台車の概略的正面図、(B)は同じく概略的側面である。
【図6】第2実施形態に係る電車線路用監視システムの測定ユニットを搭載する保守用作業車の概略図である。
【図7】第3実施形態に係る電車線路用監視システムの測定ユニットを搭載する電車車両の概略図である。
【図8】第4実施形態に係る電車線路用監視システムの測定ユニットを搭載する電車車両の概略図である。
【図9】第5実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図10】第6実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図11】第7実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図12】第8実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図13】第9実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図14】第10実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図15】第11実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図16】第12実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【図17】第13実施形態に係る電車線路用監視システムの監視対象設備の概略図である。
【発明を実施するための形態】
【0008】
本発明の実施の一形態を図面を参照して説明する。
図1において、電車線路用監視システム1は、監視対象設備に取り付けられる無線タグ2と、この無線タグ2が発した信号を受信して受信時刻を取得する測定ユニット3と、測定ユニット3からの受信時刻データを演算処理して無線タグ2の取付位置及び監視対象設備の変位を推定する制御装置であるロケーションサーバ4とで構成される。測定ユニット3は、無線タグ2が発する信号を受信する受信アンテナ5aを備えたタグリーダ5と、タグリーダ5が一体的に組み込まれ無線タグ2の信号の受信時刻を内蔵の時計6aで記録する測定器6とを一組とする、各受信アンテナ5aが互いに異なる位置に配置された四組を備えている。
この電車線路用監視システム1の監視対象設備を電車線路近辺の設備とする場合、図5に示すように、線路L上を移動可能な軌道台車Tbに測定ユニット3を搭載し、軌道台車Tbを線路上で移動させて測定地点で停止させてから、監視処理を実行する。すなわち、測定地点で無線タグ2からの信号を各受信アンテナ5aを通じてタグリーダ5で受け、信号が到着する時刻を測定器6が測定する。ロケーションサーバ4は、各測定器6からの時刻情報を受けて、各受信アンテナ5aでの受信時刻の時間差に信号の伝播速度を乗じて無線タグ2から各受信アンテナ5aまで距離の差を算出し、無線タグ2の位置を推定する到達時間差法(TDoA)により、無線タグ2の取付位置を推定する。なお、ロケーションサーバ4は測定器6の時刻情報を解析するものであるから、測定器6と一体的に軌道台車Tbに搭載されていなくてもよい。無線タグ2の取付位置に基づいて対象設備の位置が推定され、その変位が規定の許容範囲を越える場合には、電車線路用監視システムを含む電車線路設備監視システムが警報を発する等の必要な対応動作を行う。また、これらの情報は区所等の保全管理システムに保全情報として送られ有効活用される。
なお、軌道台車Tb上の各タグリーダ5のアンテナ5aの固定位置は予め既知であり、また各測定器3の時計は時刻同期していることを前提とする。
また、無線タグ2は、アクティブ型のほか、パッシブ型又はセミパッシブ型を適用できる。パッシブ型及びセミパッシブ型を適用する場合には、図2に示すように、無線タグ2の送信起電用の給電アンテナ5bを備える。
さらに、測定ユニット3は、四組のタグリーダ5及び測定器6に代えて、4個以上の受信アンテナ素子から構成されるアレイアンテナを備えた単一のタグリーダと単一の測定器6から構成してもよい。この場合、図3,図4に示すように、無線タグ2から発せられる信号に対して、タグリーダ5の受信アレイアンテナ5aの各アンテナ素子に到着する時刻が測定器6で測定される。
ロケーションサーバ4においては、無線タグ2の取付位置の推定に関して上記実施形態における到達時間差法(TDoA)のほか、各アンテナが受信した電波の位相差に基づき、各アンテナの位置から共通の特定方向を基準とする信号の伝播方向を検出する到達角度法(AoA)等の各種位置検出法を採用できる。特にタグリーダ5にアレイアンテナを適用する場合には、信号の位相差の検出に有効なため、到達角度法(AoA)が適する。
無線タグ2の信号は位置検出のために利用されるが、これに加えて、例えば温度センサによる温度などの位置検出以外の状態検出用の各種センサによるセンシングデータを同時に送ることに利用してもよい。
これらの実施例の変更は、以下の実施形態においても同様に適用できる。
【0009】
第2実施形態に係る電車線路用監視システム1は、図6に示すように、測定ユニット3が保守用作業車Cに搭載されている。保守用作業車Cは、線路上を走行可能で、所定の測定地点に移動したら、停止しあるいは走行しながら、先と同様にしてタグリーダ5が無線タグ2の信号を受信し、測定器6が信号の到着時刻を測定し、ロケーションサーバ4が各測定器6からの時刻情報を受けて、到達時間差法(TDoA)により、無線タグ2の取付位置を推定する。
【0010】
第3実施形態に係る電車線路用監視システム1は、図7に示すように、測定ユニット3が営業運行中の電車Trに搭載され、無線タグ2にパッシブ型又はセミパッシブ型を適用する。無線タグ2の送信起電用の給電アンテナ5bは、無線タグ2に信号を送信させるのに必要な電力をまかなうために電車Trの車両上に固定される。高速走行する電車Trの場合には、長時間起電し十分な読み取り時間を確保するため、複数の給電アンテナ5bを設ける。通常運行時間中に電車Trを走行させながら、給電アンテナ5bにより無線タグ2を送信起電しつつ各タグリーダ5が無線タグ2の信号を受信し、各測定器6が信号の到着時刻を測定し、ロケーションサーバ4が各測定器6からの時刻情報を受けて、到達時間差法(TDoA)により、無線タグ2の取付位置を推定する。
【0011】
第4実施形態に係る電車線路用監視システム1は、図2に示すように、給電アンテナ5bを含む測定ユニット3が営業運行中の電車Trに前後に異なる位置に複数搭載されている。従って、一の無線タグ2を複数回測定することになり、信号の読み取り不良による誤測定の可能性を低減できる。
なお、第3,第4実施形態では測定ユニット3を電車Trに搭載して営業運行中に無線タグ2の信号を読み取ることとしたが、これに代えて検測車に搭載して営業運行時間外に測定作業を行うこととしてもよい。
【0012】
第5実施形態に係る電車線路用監視システム1は、図9に示すように、トロリ線Tを監視対象設備としている。電車線路用監視システム1は、トロリ線Tが支持される支柱に第1無線タグ2aが取り付けられ、トロリ線Tの径間中央位置に第2無線タグ2bが取り付けられ、さらにトロリ線Tを支柱に支持する支持部材の支持点に第3無線タグ2cが取り付けられる。各無線タグ2a,2b,2cの信号を、図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2b,2cの取付位置を推定する。無線タグ2の取付位置に基づいて線路間中心位置Xを基準とするトロリ線Tの水平方向の偏位や高さが推定される。さらに、営業運行時の電車通過時のパンタグラフによるトロリ線の押し上げ高さが推定される。このようなトロリ線Tの偏位、高さ及びパンタグラフの押し上げ高さが規定の許容範囲を越える場合には、電車線路用監視システムを含む電車線路設備監視システムが警報を発する等の必要な対応動作を行う。また、電車線、電柱及びその支持点並びに軌道中心Xからの偏位を表した電車線線路平面図の作成に利用される。
【0013】
第6実施形態に係る電車線路用監視システム1は、図10に示すように、トロリ線の張力を一定に維持するために支柱Pに設けられた滑車式テンションバランサB1を監視対象設備としている。電車線路用監視システム1は、トロリ線にテンションを付与するための重錘Wの上下変位をガイドするガイド部材の下端位置に第1無線タグ2aが取り付けられると共に、重錘Wの下端位置に第2無線タグ2bが取り付けられ、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、重錘Wの変位が規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0014】
第7実施形態に係る電車線路用監視システム1は、図11に示すように、トロリ線の張力を適切に維持するために支柱に引き留められるばね式テンションバランサB2を監視対象設備とするものである。ばね式テンションバランサB2は、支柱に結合される外筒内に、中筒及びロッドを内外三重に入れ子式に組み込み、外筒P1と中筒P2との間及び中筒P2とロッドR1との間に夫々ばねを介設して、ロッドRの先端を電車線に接続する。電車線路用監視システム1は、外筒P1に第1無線タグ2aを取り付け、ロッドR1に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、外筒P1に対するロッドR1の変位が規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0015】
第8実施形態に係る電車線路用監視システム1は、図12に示すように、トロリ線の張力を適切に維持するために支柱に引き留められたガス式テンションバランサB3を監視対象設備とするものである。ガス式テンションバランサB3は、支柱に固定されるシリンダCr内にロッドR2が出入り自在に挿入され、ロッドR2にトロリ線が接続され、シリンダCr内をロッドR2が出入りすることで、シリンダCr内の高圧ガスが圧縮され、この圧力をトロリ線の張力に作用させるものである。電車線路用監視システム1は、シリンダCrが固定されるホルダHに第1無線タグ2aを取り付けると共に、ロッドR2に固定されたカバーCvに第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、ホルダHに対するカバーCvの変位を算出し、規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0016】
第9実施形態に係る電車線路用監視システム1は、図13に示すように、トロリ線を側方の支持部材に引止める曲線引金具Kを監視対象設備とする。曲線引金具Kは、側方の構造物から支持部材Sを介して線路上に延出し、先端のイヤーでトロリT線を支持する。この電車線路用監視システム1は、支持部材Sの端部に第1無線タグ2aを取り付けると共に、曲線引金具Kの先端部上に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これにより、曲線引金具Kの傾斜角を算出し、規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0017】
第10実施形態に係る電車線路用監視システム1は、図14に示すように、トロリ線を監視対象設備とするものである。この電車線路用監視システム1は、張架線の支持点に対応するトロリ線Tの位置に第1無線タグ2aを取り付け、各径間中央点に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいて、トロリ線Tの各部の高さを算出し、規定の許容範囲を越えていれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0018】
第11実施形態に係る電車線路用監視システム1は、図15に示すように、二つの電車線のオーバーラップ部のトロリ線を監視対象設備とするものである。この電車線路用監視システム1は、電車線の移行点に対応するトロリ線Tの位置に第1無線タグ2aを取り付け、引上げたトロリ線TのがいしG付近に第2無線タグ2aを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいて電車線のオーバーラップ部の間隔を算出し、規定の許容範囲を越えた接近があれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0019】
第12実施形態に係る電車線路用監視システム1は、図16に示すように、本線とこれに交差するわたり線とのトロリ線を監視対象設備とするものである。この電車線路用監視システム1は、本線とわたり線との間隔が900mmとなる位置における本線のトロリ線T1に第1無線タグ2aを取り付け、当該位置におけるわたり線のトロリ線T2に第2無線タグ2bを取り付け、両無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいてトロリ線相互の高低差を算出し、規定の許容範囲を越えた変動があれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【0020】
第13実施形態に係る電車線路用監視システム1は、図17に示すように、き電線Fを対象設備とするものである。電車線路用監視システム1は、き電線Fの各支持点に第1無線タグ2aを取り付け、各径間中央点に第2無線タグ2bを取り付け、これらの無線タグ2a,2bの信号を図示しない上記実施形態における測定ユニット3で受信して、ロケーションサーバ4が無線タグ2a,2bの取付位置を推定する。これに基づいて、き電線の各径間の弛みを算出し、規定の許容範囲を越えた変動があれば、電車線路用監視システムに連携する保全管理システムが警報を発する等の必要な対応動作を行う。
【符号の説明】
【0021】
1 電車線路用監視システム
2 無線タグ
2a 第1無線タグ
2b 第2無線タグ
2c 第3無線タグ
3 測定ユニット
4 ロケーションサーバ
5 タグリーダ
5a 受信アンテナ
5b 給電アンテナ
6 測定器
6a 時計
Tb 軌道台車
L レール
C 保守用作業車
B1 滑車式テンションバランサ
P 支柱
W 重錘
B2 ばね式テンションバランサ
P1 外筒
R1 ロッド
B3 ガス式テンションバランサ
Cr シリンダ
R2 ロッド
Cv カバー
H ホルダ
K 曲線引金具
S 支持部材
T トロリ線
T1 トロリ線
T2 トロリ線
M ちょう架線
G がいし
F き電線
【特許請求の範囲】
【請求項1】
電車線路設備内の対象設備に取り付けられて信号出力可能な無線タグと、
この無線タグの信号を互いに異なる位置で受信する複数の受信アンテナを備えたタグリーダと、
各受信アンテナが受信した信号の受信時刻を取得する測定器と、
測定器による受信時刻を基に無線タグの取付位置を算出して特定し、対象設備の規定位置からの変位を測定する制御装置とを具備し、
前記タグリーダの取付位置に基づいて対象設備の変位状態を監視することを特徴とする電車線路用監視システム。
【請求項2】
前記無線タグは、相対変位を伴う部材を備えた前記対象設備の各部材に取り付けられ、
前記制御装置は、これらの無線タグの取付位置を基に、前記対象設備の部材間の相対変位から対象設備の状態を推定することを特徴とする請求項1に記載の電車線路用監視システム。
【請求項3】
前記無線タグは、トロリ線に取り付けられ、
前記制御装置は、線路間中心位置を基準とするトロリ線の偏位を推定することを特徴とする請求項1に記載の電車線路用監視システム。
【請求項4】
前記無線タグは、テンションバランサの固定位置と可動位置とに取り付けられることを特徴とする請求項2に記載の電車線路用監視システム。
【請求項5】
前記無線タグは、曲線引金具の両端部に取り付けられ、
前記制御装置は、曲線引金具の傾斜角を推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項6】
前記無線タグは、電車線の支持位置に対応するトロリ線とトロリ線の径間中央とに取り付けられ、
前記制御装置は、電車線の高さ又は弛みを推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項7】
前記無線タグは、電車線のオーバーラップ部の電車線の移行点と碍子を結合して引き上げた電車線の当該碍子付近に取り付けられ、
前記制御装置は、電車線の引き上げ高さを推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項8】
前記無線タグは、本線とこれに交差するわたり線との間隔が900mm付近の本線及びわたり線のトロリ線にそれぞれ取り付けられ、
前記制御装置は、本線とわたり線とのトロリ線の高低差を推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項9】
前記無線タグは、き電線の支持位置と径間中央にそれぞれ取り付けられ、
前記制御装置は、き電線の弛みを推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項10】
前記測定器が線路上を走行可能な軌道台車又は車両に搭載され、その走行状態又は停止状態でタグリーダによる読み取りが行われることを特徴とする請求項1から9の何れかに記載の電車線路用監視システム。
【請求項11】
前記車両が通常の運行時の営業車両にであることを特徴とする請求項10に記載の電車線路用監視システム。
【請求項12】
前記無線タグがパッシブ型又はセミパッシブ型であり、
前記無線タグに送信用起電に必要な給電をするための給電アンテナが前記軌道台車又は車両に取り付けられることを特徴とする請求項10又は11に記載の電車線路用監視システム。
【請求項1】
電車線路設備内の対象設備に取り付けられて信号出力可能な無線タグと、
この無線タグの信号を互いに異なる位置で受信する複数の受信アンテナを備えたタグリーダと、
各受信アンテナが受信した信号の受信時刻を取得する測定器と、
測定器による受信時刻を基に無線タグの取付位置を算出して特定し、対象設備の規定位置からの変位を測定する制御装置とを具備し、
前記タグリーダの取付位置に基づいて対象設備の変位状態を監視することを特徴とする電車線路用監視システム。
【請求項2】
前記無線タグは、相対変位を伴う部材を備えた前記対象設備の各部材に取り付けられ、
前記制御装置は、これらの無線タグの取付位置を基に、前記対象設備の部材間の相対変位から対象設備の状態を推定することを特徴とする請求項1に記載の電車線路用監視システム。
【請求項3】
前記無線タグは、トロリ線に取り付けられ、
前記制御装置は、線路間中心位置を基準とするトロリ線の偏位を推定することを特徴とする請求項1に記載の電車線路用監視システム。
【請求項4】
前記無線タグは、テンションバランサの固定位置と可動位置とに取り付けられることを特徴とする請求項2に記載の電車線路用監視システム。
【請求項5】
前記無線タグは、曲線引金具の両端部に取り付けられ、
前記制御装置は、曲線引金具の傾斜角を推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項6】
前記無線タグは、電車線の支持位置に対応するトロリ線とトロリ線の径間中央とに取り付けられ、
前記制御装置は、電車線の高さ又は弛みを推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項7】
前記無線タグは、電車線のオーバーラップ部の電車線の移行点と碍子を結合して引き上げた電車線の当該碍子付近に取り付けられ、
前記制御装置は、電車線の引き上げ高さを推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項8】
前記無線タグは、本線とこれに交差するわたり線との間隔が900mm付近の本線及びわたり線のトロリ線にそれぞれ取り付けられ、
前記制御装置は、本線とわたり線とのトロリ線の高低差を推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項9】
前記無線タグは、き電線の支持位置と径間中央にそれぞれ取り付けられ、
前記制御装置は、き電線の弛みを推定することを特徴とする請求項2に記載の電車線路用監視システム。
【請求項10】
前記測定器が線路上を走行可能な軌道台車又は車両に搭載され、その走行状態又は停止状態でタグリーダによる読み取りが行われることを特徴とする請求項1から9の何れかに記載の電車線路用監視システム。
【請求項11】
前記車両が通常の運行時の営業車両にであることを特徴とする請求項10に記載の電車線路用監視システム。
【請求項12】
前記無線タグがパッシブ型又はセミパッシブ型であり、
前記無線タグに送信用起電に必要な給電をするための給電アンテナが前記軌道台車又は車両に取り付けられることを特徴とする請求項10又は11に記載の電車線路用監視システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−67207(P2013−67207A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205420(P2011−205420)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000001890)三和テッキ株式会社 (134)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000001890)三和テッキ株式会社 (134)
【Fターム(参考)】
[ Back to top ]