
非破壊検査方法と非破壊検査装置
【課題】コンクリートの被りの深さに拘わりなく鉄筋の屈曲部の破断を確実に検出することのできる非破壊検査方法と非破壊検査装置を提供する。
【解決手段】コンクリート体401内に設けられる鉄筋402を、そのコンクリート体1の外側から磁石J3により磁化し、この後そのコンクリート体1上の磁束密度を測定することによって鉄筋402の屈曲部402aの破断の有無を検出する非破壊検査方法であって、表面401Aから鉄筋部402Aを磁化させることができない場合、磁石J3の向きを鉄筋部402Aの長手方向に一致させるとともに、磁石J3を表面401Bより所定距離離間した位置からその表面に向かって磁石J3を移動させることにより、鉄筋部402Aを長手方向に沿って磁化させ、この後に、磁石J3の向きを他方の鉄筋部402Bの長手方向に一致させ、磁石を表面401Bに沿って移動させることにより、鉄筋部402Bを長手方向に沿って磁化させて前記鉄筋の屈曲部の破断の有無を検出する。
【解決手段】コンクリート体401内に設けられる鉄筋402を、そのコンクリート体1の外側から磁石J3により磁化し、この後そのコンクリート体1上の磁束密度を測定することによって鉄筋402の屈曲部402aの破断の有無を検出する非破壊検査方法であって、表面401Aから鉄筋部402Aを磁化させることができない場合、磁石J3の向きを鉄筋部402Aの長手方向に一致させるとともに、磁石J3を表面401Bより所定距離離間した位置からその表面に向かって磁石J3を移動させることにより、鉄筋部402Aを長手方向に沿って磁化させ、この後に、磁石J3の向きを他方の鉄筋部402Bの長手方向に一致させ、磁石を表面401Bに沿って移動させることにより、鉄筋部402Bを長手方向に沿って磁化させて前記鉄筋の屈曲部の破断の有無を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば橋脚などのコンクリート体内に設けられている鉄筋の破断の有無を検出する非破壊検査方法と非破壊検査装置に関する。
【背景技術】
【0002】
従来から、コンクリート内の鉄筋の欠陥を検出する非破壊検査方法が知られている(特許文献1参照)。
【0003】
かかる非破壊検査方法は、コンクリートに埋設された鉄筋にバイアス磁場によって長手方向に沿って平行に磁化し、鉄筋の欠損部により発生する漏洩磁束を測定して欠損部を検出するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−294850号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、このような非破壊検査方法にあっては、鉄筋が屈曲されている場合、その屈曲部で漏洩磁界の向きが複雑になることにより、その屈曲部での破断を検出することができないという問題があった。また、コンクリートの被りが深いと鉄筋の磁化も難しく、その漏洩磁束の検出も難しいという問題があった。
【0006】
この発明の目的は、コンクリートの被りの深さに拘わりなく鉄筋の屈曲部の破断を確実に検出することのできる非破壊検査方法と非破壊検査装置を提供することにある。
【課題を解決するための手段】
【0007】
請求項1の発明は、コンクリート体内に設けられるとともにそのコンクリート体の表面に沿って延び且つそのコンクリート体の角部で屈曲させてある鉄筋を、そのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記コンクリート体の角部の一方側の表面位置から前記鉄筋の一方の鉄筋部を磁化させることができない場合、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする。
請求項2の発明は、コンクリート体内に設けられる屈曲部と、この屈曲部からコンクリート体の角部の一方側の表面に沿って延びるとともにその一方側の表面から深い位置に配置される一方の鉄筋部と、前記屈曲部からコンクリート体の他方側の表面に沿って延びるとともにその他方側の表面から浅い位置に配置される他方の鉄筋部とを有する鉄筋をそのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする。
請求項5の発明は、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度を求める演算手段と、
この演算手段が求める磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする。
請求項6の発明は、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向と直交する直交方向成分の磁束密度を求める演算手段と、
この演算手段が求める直交方向成分の磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記前記移動位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする。
請求項7の発明は、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度と、前記鉄筋部の長手方向と直交する直交方向成分の磁束密度とを求める演算手段と、
この演算手段が求める前記長手方向成分の磁束密度のピークと前記直交方向成分の磁束密度のピークとを検出するピーク検出手段と、
このピーク検出手段が前記長手方向成分の磁束密度のピークを検出したときの前記移動位置検出手段が検出する位置と、前記ピーク検出手段が前記直交方向成分の磁束密度のピークを検出したときの前記前記移動位置検出手段が検出する位置とに基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする。
【発明の効果】
【0008】
この発明によれば、コンクリートの被りの深さに拘わりなく鉄筋の屈曲部の破断を確実に検出することができる。
【図面の簡単な説明】
【0009】
【図1】鉄筋の磁化の方法を示した説明図である。
【図2】非破壊検査装置の構成を示したブロック図である。
【図3】鉄筋の屈曲部に破断を有する場合とない場合の水平方向成分の磁束密度を示したグラフである。
【図4】第2実施例の非破壊検査装置の構成を示したブロック図である。
【図5】鉄筋の屈曲部に破断を有する場合とない場合の水平方向成分と垂直方向成分の磁束密度を示したグラフである。
【図6】コンクリート体の上面から鉄筋部を磁化させる場合を示した説明図である。
【図7】コンクリート体の側面から鉄筋部を磁化させる場合を示した説明図である。
【図8】コンクリート体の上面の次に側面から磁化させ、この場合の上面の垂直方向の磁束密度を測定したときのグラフである。
【図9】コンクリート体の上面の次に側面から磁化させ、この場合の側面の垂直方向の磁束密度を測定したときのグラフである。
【図10】コンクリート体の上面の次に側面から磁化させ、再度上面から磁化してその上面の垂直方向の磁束密度を測定したときのグラフである。
【図11】コンクリート体の上面の次に側面から磁化させ、再度上面から磁化してその側面の垂直方向の磁束密度を測定したときのグラフである。
【図12】第3実施例の非破壊検査装置の構成を示したブロック図である。
【図13】コンクリート体の角部の他の着磁方法を示した説明図である。
【図14】コンクリート体の角部の別な他の着磁方法を示した説明図である。
【図15】コンクリート体の上面から着磁できない場合の着磁方法示した説明図である。
【図16】コンクリート体の上面から着磁できない場合の磁石の移動を示した説明図である。
【図17】別な例のコンクリート体の鉄筋の配置を示した説明図である。
【図18】図17に示すコンクリート体の側面から測定した磁束密度のグラフを示す。
【発明を実施するための形態】
【0010】
以下、この発明に係る非破壊検査方法と非破壊検査装置の実施の形態である実施例を図面に基づいて説明する。
【実施例】
【0011】
[第1実施例]
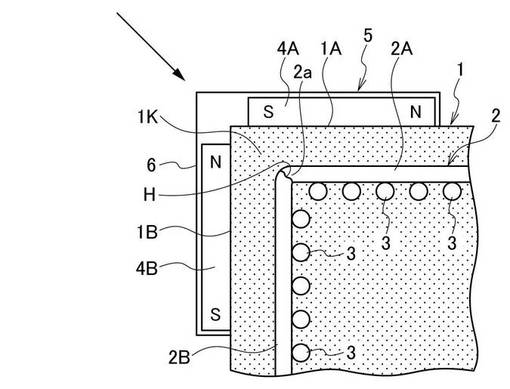
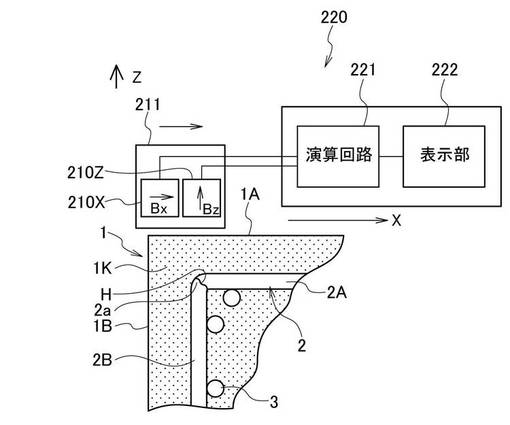
図1において、1は例えば橋脚のコンクリート体であり、このコンクリート体1内には主鉄筋(鉄筋)2が設けられており、この主鉄筋2はコンクリート体1の角部1Kで屈曲された屈曲部2aを有している。3は補助鉄筋である。
【0012】
この主鉄筋2の屈曲部2aで破断Hが発生し易く、この屈曲部2aの破断Hを検出する非破壊検査方法について説明する。なお、主鉄筋2の位置や屈曲部2aの位置は既知である。
【0013】
先ず、図1に示すコンクリート体1の角部1KにL字形の磁石ユニット5を置く。
【0014】
この磁石ユニット5は、主鉄筋2の左右方向に延びた一方の鉄筋部2Aに沿った配置される長い磁石4Aと、主鉄筋2の上下方向に延びた他方の鉄筋部2Bに沿って配置される長い磁石4Bと、これら磁石4A,4Bを保持したL字形の非磁性体からなる保持部材6とを有している。
【0015】
磁石4A,4Bは、例えばNd系のような希土類金属からなる永久磁石であるが電磁石であってもよい。磁石4Aは、例えば一端(右端)がN極であり、他端がS極となっている。また、磁石4Bは、磁石4Aの他端がS極の場合、その上端がN極であり、下端がS極となる。磁石4Aの他端がN極の場合には、磁石4Bの磁極はその逆となる。
【0016】
磁石ユニット5は、例えば矢印方向からコンクリート体1の角部1Kに置く。これにより、磁石ユニット5の磁石4Aがコンクリート体1の上面(表面)1Aに載置(当接)され、磁石4Bがコンクリート体1の側面1Bに当接される。そして、主鉄筋2の鉄筋部2A,2Bは長手方向に沿って磁石4A,4Bにより同時に磁化、すなわち同時に着磁される。この同時の着磁により、鉄筋2の屈曲部2aを一様に磁化させることができることになる。
【0017】
また、鉄筋部2A,2Bすなわち主鉄筋2は磁極の向きが同一となるように磁化されることになる。
【0018】
主鉄筋2の鉄筋部2A,2Bの着磁が終了したら、磁石ユニット5を上記の矢印と反対方向に移動または横にスライドさせて遠ざける。
【0019】
次に、コンコリート体1の面(上面)1Aに対して水平方向の漏洩磁束密度をその面1Aの各位置ごとに磁気センサ10により検出していく。この磁気センサ10は、高感度の例えばMIセンサあるいはフラックスゲート型センサである。
【0020】
漏洩磁束の測定は、図2に示すように磁気センサ10をコンクリート体1の面1A上に沿って移動させながら行う。すなわち、コンクリート体1の左端から右端方向へ所定距離の範囲について行い、その磁気センサ10の移動方向は図2の実線位置から矢印方向へ移動させてもよく、逆に左側からコンクリート体1の右端位置へ移動させてもよい。
【0021】
同様に、磁気センサ10をコンクリート体1の面1B上に沿って、コンクリート体1の上端(図2において)から下方へ所定距離の範囲について行い、その磁気センサ10の移動方向は上下(図2において)のどちらでもよい。
【0022】
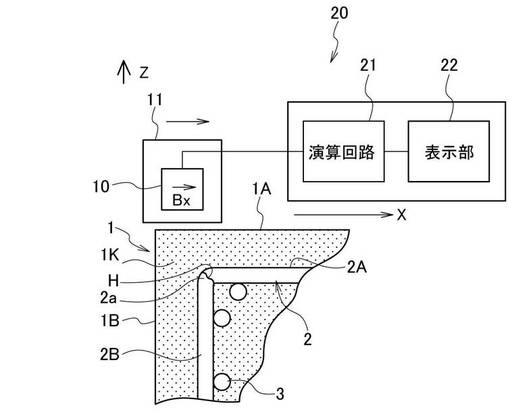
図2に示す20は主鉄筋2の屈曲部2aの破断Hを検出する非破壊検査装置である。
【0023】
非破壊検査装置20は、X方向の磁気を検出する磁気センサ10を有する磁気検知部11と、この磁気センサ10が検出する検出信号からコンクリート体1の面1A,1Bに平行な方向の磁束密度を演算して求める演算回路21と、この演算回路21が演算した磁束密度をグラフにして表示する表示部22とを備えている。
【0024】
磁気検知部11は、この磁気検知部11の移動距離を求める距離センサ(図示せず)が組み込まれている。
【0025】
演算回路21は、距離センサが求める移動距離に対応してコンクリート体1の面1A,1Bの各位置における面1A,1Bと平行な磁束密度、すなわち主鉄筋2の長手方向である鉄筋部2A,2Bの長手方向成分の磁束密度を求めるものである。
【0026】
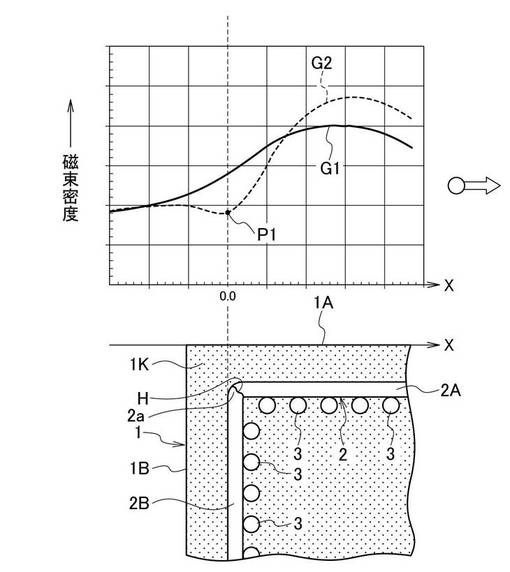
上述のようにして主鉄筋2の鉄筋部2A,2Bを磁化させた後、この主鉄筋2の鉄筋部2Aに沿って磁気検知部11をコンクリート体1の面1A上を移動させると、すなわち、X軸方向に沿って移動させていくと、図3に示すように、コンクリート体1の面1Aの各位置における磁束密度(面1Aと平行な磁束密度:X方向の磁束密度)が求められていく。
【0027】
図3に示すグラフG1が主鉄筋2の屈曲部2aに破断Hがない健全な場合の磁束密度であり、グラフG2が屈曲部2aに破断Hがある場合の磁束密度を示す。このように、屈曲部2aに破断Hがあると、グラフG2にマイナス方向にピークP1(谷部)が生じる。また、鉄筋2の屈曲部2aに破断Hがある場合には、その屈曲部2aの位置やこの近傍でマイナス方向のピークP1が生じることも分かった。
【0028】
このグラフG1またはG2は表示部22に表示される。このピークP1はコンクリートの被りが深くても検出することができる。
【0029】
これに対して、屈曲部2aに破断Hがない場合には、グラフG1で示すようにピークは生じない。
【0030】
したがって、ピークP1があるかないかで破断Hの有無を判断(判定)することができ、しかもそのピークP1の位置を特定することにより、破断Hの有無を確実に判断することができることになる。つまり、ピークP1が生じていても、そのピークP1の位置が屈曲部2aの位置から大きくずれていれば、そのピークP1は屈曲部2aの破断以外の要因で生じたものであり、屈曲部2aに破断が生じていないことが分かり、破断Hの有無の判断がより確実なものとなる。
【0031】
ピークP1の有無の判断は表示部22に表示されるグラフG1,G2からオペレータが判断してもよく、ピーク検出回路(判定手段)を用いてそのピークを検出して破断Hの有無を判断してもよい。
[第2実施例]
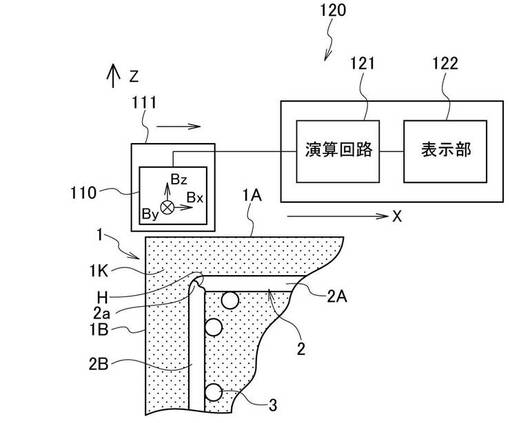
図4は第2実施例の非破壊検査装置120の構成を示す。この非破壊検査装置120は、X方向(面と平行な方向)およびZ方向(面に垂直な方向)の磁気を検出する磁気センサ110を有する磁気検知部111と、この磁気センサ110が検出する検出信号からコンクリート体1の面1Aと平行な磁束密度とその面1Aと直交する方向(Z方向)の磁束密度とを演算して求める演算回路121と、この演算回路121が演算した磁束密度をグラフにして表示する表示部122とを備えている。
【0032】
磁気検知部111は、この磁気検知部111の移動距離を求める距離センサ(図示せず)が組み込まれている。
【0033】
この非破壊検査装置120で検査する場合も、上述のように主鉄筋2の鉄筋部2A,2Bを同時に磁化させて検査する。
【0034】
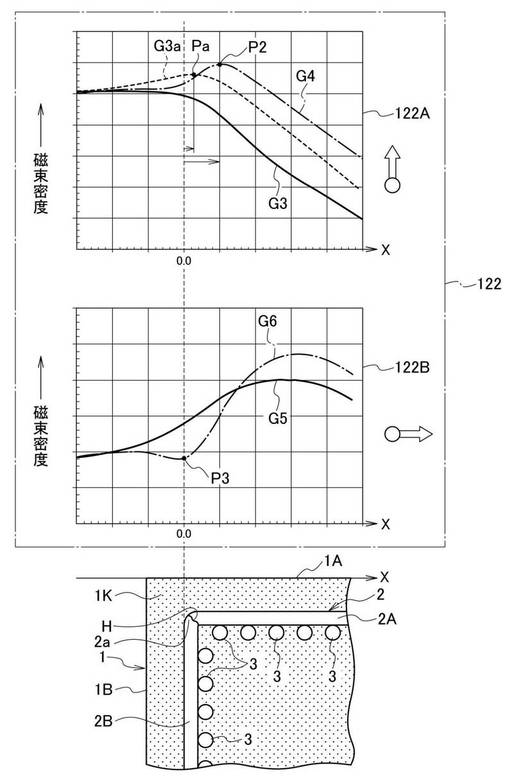
表示部122には、図5に示すように、Z方向の磁束密度のグラフを示す画面122Aと、X方向の磁束密度のグラフを示す画面122Bとが表示される。
【0035】
画面122Aには、磁気検知部111をコンクリート体1の面1A上を移動させていった場合、Z方向の磁束密度を示すグラフG3またはグラフG4が表示され、画面122BにはX方向の磁束密度を示すグラフG5またはグラフG6が表示される。
【0036】
グラフG3は鉄筋2の屈曲部2aに破断がない場合のグラフであり、G4は鉄筋2の屈曲部2aに破断Hがある場合のグラフである。グラフG5は鉄筋2の屈曲部2aに破断がない場合のグラフであり、G6は鉄筋2の屈曲部2aに破断Hがある場合のグラフである。
【0037】
このグラフG3,G4から分かるように、鉄筋2の屈曲部2aに破断HがあるとグラフG4にプラス方向のピークP2が生じる。また、鉄筋2の屈曲部2aに破断Hがある場合には、その屈曲部2aの位置から所定距離離れた範囲内でピークP2が生じることも分かった。
【0038】
また、グラフG3は鉄筋2の屈曲部2aに破断がない場合でも、グラフG3aに示すように屈曲部2aの位置付近でピークPaを示す場合がある。
【0039】
グラフG5,G6は、図3に示すグラフG1,G2と同様なものとなり、鉄筋2の屈曲部2aに破断Hがある場合、その屈曲部2aの位置でグラフG6にマイナス方向のピークP3が生じる。
【0040】
これらピークP2,P3の有無とピークP2,P3の位置とによって、鉄筋2の屈曲部2aに破断Hの有無をより確実に検出することができることになる。
【0041】
例えば、鉄筋2の屈曲部2aに破断がないのに、画面122AのグラフG3aに示すようにピークPaが生じた場合、画面122AのグラフG3aだけで判断すると破断Hがあると判断してしまうが、破断Hがない場合には画面122BにX方向の磁束密度を示すグラフG5が表示されるので、破断Hがないことが分かり、誤検出を防止することができる。
【0042】
また、グラフG4,G6のどちらか一方にピークが有り、グラフG4のピークの位置が屈曲部2aの位置から所定距離離れた範囲内、あるいはグラフG6のピーク位置が屈曲部2aの位置付近であるか否かで破断Hの有無を確実に検出することができることになる。
【0043】
ピークP2,P3の有無の判断は表示部122に表示されるグラフG3〜G6からオペレータが判断してもよい。また、ピーク検出回路を用いてピークを検出し、ピーク位置検出手段を用いてそのピークの位置を求め、ピークの有無とピークの位置とに基づいてマイクロコンピュータ(判定手段)等により破断Hの有無を判定するようにしてもよい。
【0044】
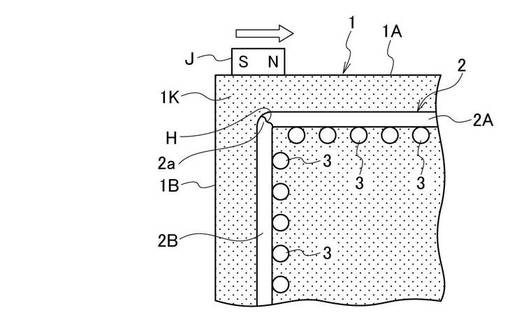
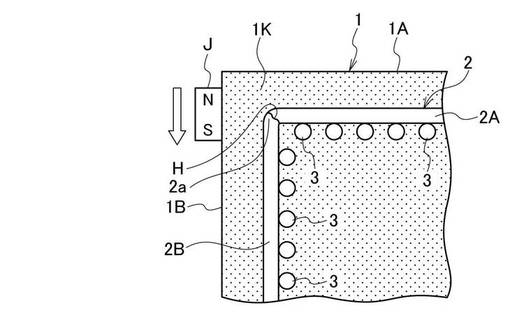
ところで、主鉄筋2の鉄筋部2A,2Bを同時に磁化させて鉄筋2の屈曲部2aを一様に磁化させているが、これは、例えば図6および図7に示すように、先ず最初にコンクリート体1の上面1A上に沿って磁石Jを移動させ、次にコンクリート体1の側面1B上に沿って磁石Jを移動させて主鉄筋2の鉄筋部2A,2Bを磁化させると、鉄筋2の屈曲部2aが一様に磁化されず、破断Hが生じてない健全な鉄筋であっても磁束密度の測定波形にピークが生じてしまうことがあるからである。このような場合、破断Hの有無の判定の分析のために長時間要してしまう。
【0045】
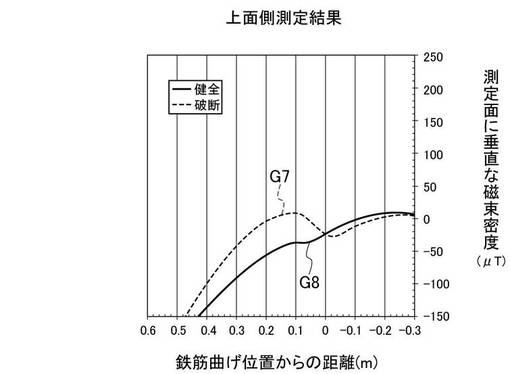
例えば、上述のようにコンクリート体1の上面1Aに沿って磁石Jを移動させ、次にコンクリート体1の側面1B上に沿って磁石Jを移動させた後に、磁気検知部11を上面1A上を移動させて、上面1Aに直交する磁束密度を測定すると、図8に示すグラフG7,G8が得られる。グラフG7は主鉄筋2の屈曲部2aに破断Hが有る場合のグラフであり、グラフG8は主鉄筋2の屈曲部2aに破断がない場合のグラフである。
【0046】
このように、主鉄筋2の屈曲部2aに破断があってもピークが明確に現れないので、破断Hの有無の判定がしづらいものとなる。
【0047】
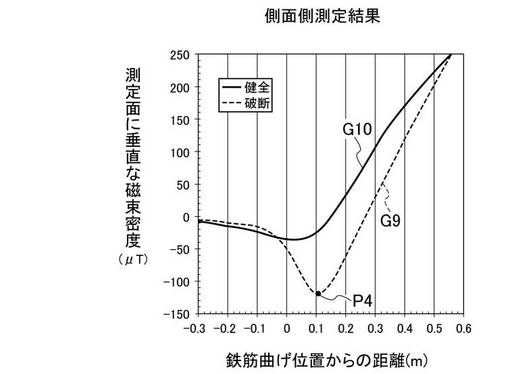
図9は、上記のようにして主鉄筋2を磁化させた後に、コンクリート体1の側面1Bに沿って磁気検知部11を移動させて、コンクリート体1の側面1Bに直交する磁束密度を測定した場合のグラフG9,G10を示す。
【0048】
グラフG9は主鉄筋2の屈曲部2aに破断Hがある場合のグラフであり、グラフG10は主鉄筋2の屈曲部2aに破断Hがない場合のグラフである。
【0049】
グラフG9にはピークP4が明確に現れる。これは、鉄筋部2Bが一様に磁化されたことによる。一方、この鉄筋部2Bの磁化の際に、既に一様に磁化された鉄筋部2Aがその磁化の影響を受けて、鉄筋部2Aは一様に磁化された状態でなくなってしまうため、図8に示すグラフG7,G8となる。
【0050】
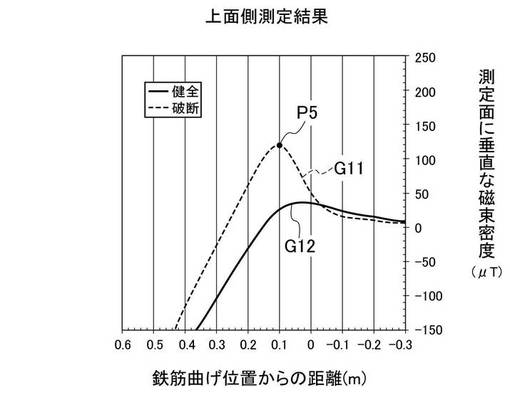
図10は、再度コンクリート体1の上面1Aから鉄筋部2Aを着磁し、この上面1A側の垂直方向の磁束密度を測定したグラフG11,G12を示す。グラフG11が主鉄筋2の屈曲部2aに破断Hがある場合のグラフであり、グラフG12がその屈曲部2aに破断がない場合のグラフである。グラフG11にはピークP5が明確に現れる。
【0051】
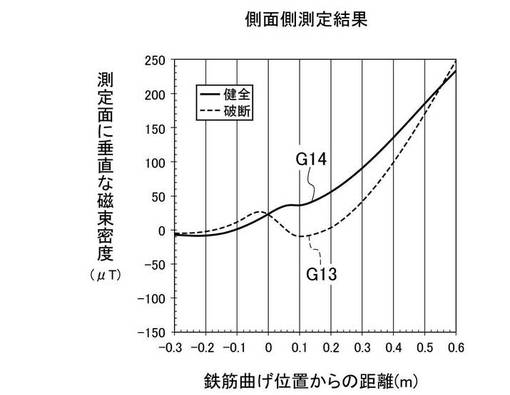
図11は、コンクリート体1の上面1Aから鉄筋部2Aを再度着磁した後に、コンクリート体1の側面1B側からこの側面1Bと直交する方向の磁束密度を測定したグラフG13,G14を示す。グラフG13が主鉄筋2の屈曲部2aに破断Hがある場合のグラフであり、グラフG14がその屈曲部2aに破断がない場合のグラフである。
【0052】
このように、図8のグラフG7,G8と図11のグラフG13,G14とが対称的となり、図9のグラフG9,G10と図10のグラフG11,G12とが対称的となっている。しかし、図8のグラフG7,G8と図9のグラフG9,G10および図10のグラフG11,G12と図11のグラフG13,G14は対称的にならない。また、グラフG7,G8,G13,G14からでは破断Hを検出することは難しいものとなる。
【0053】
また、上述のようにコンクリート体1の側面1Bの磁束密度を測定する場合、再度その側面1Bから鉄筋部2Bを磁化させなければならず、また、この測定の後、コンクリート体1の上面1Aの磁束密度を測定する場合には、この上面1Aから鉄筋部2Aを磁化させなければならない。このように、測定する面1A,1Bを変える毎に磁化させる作業が必要となる。
【0054】
上記第1,第2実施例では、鉄筋2の鉄筋部2A,2Bを同時に着磁するので、鉄筋2の屈曲部2aを一様に磁化させることができ、このため、測定する面1A,1Bを変える毎に磁化させる作業は不要となる。
[第3実施例]
図12は第3実施例の非破壊検査装置220の構成を示す。この非破壊検査装置220は、X方向の磁気を検出する磁気センサ210Xと、Z方向の磁気を検出する磁気センサ210Zとを有する磁気検知部211と、磁気センサ210X210Zが検出する検出信号からコンクリート体1の面1Aと平行な方向(X方向)の磁束密度とその面1Aと直交する方向(Z方向)の磁束密度とを演算して求める演算回路221と、この演算回路221が演算した磁束密度をグラフにして表示する表示部222とを備えている。磁気検知部211は、この磁気検知部211の移動距離を求める距離センサ(図示せず)が組み込まれている。
【0055】
この非破壊検査装置220で検査する場合も、第1実施例と同様に主鉄筋2の鉄筋部2A,2Bを同時に磁化させて検査する。
【0056】
この非破壊検査装置220もピークの有無の判断は表示部222に表示されるグラフからオペレータが判断してもよく、ピーク検出回路(判定手段)を用いてそのピークを検出して破断Hの有無を判断してもよい。
[他の着磁方法1]
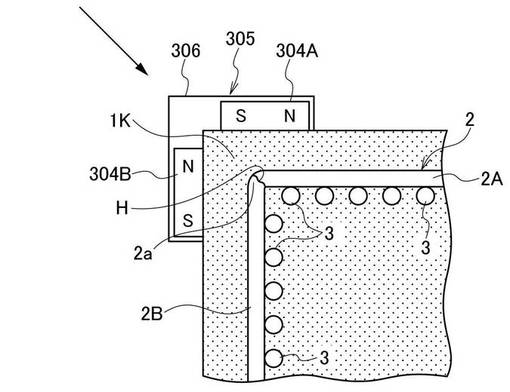
図13は小型の磁石ユニット305を用いて主鉄筋2の屈曲部2aを一様に磁化せる場合の例を示す。
【0057】
磁石ユニット305は、主鉄筋2の左右方向に延びた一方の鉄筋部2Aに沿って配置される磁石304Aと、主鉄筋2の上下方向に延びた他方の鉄筋部2Bに沿って配置される磁石304Bと、これら磁石304A,304Bを保持したL字形の非磁性体からなる保持部材306とを有している。
【0058】
この磁石ユニット305で着磁を行うには、先ず、図6および図7に示すように、磁石Jによって主鉄筋2の鉄筋部2A,2Bを磁化させる。このとき、磁石Jの向きを磁石ユニット305の磁石304A,304Bの向きと同一となるようにする。
【0059】
主鉄筋2の鉄筋部2A,2Bの磁化が終了したら、磁石ユニット305を例えば矢印方向からコンクリート体1の角部1Kに置く。これにより、鉄筋2の屈曲部2aを一様に磁化させることができる。この磁化が終了したら、磁石ユニット305を磁石ユニット5と同様にしてコンクリート体1の角部1Kから遠ざける。
【0060】
この後、非破壊検査装置20,120,220によって主鉄筋2の屈曲部2aの破断Hの有無を検査する。
【0061】
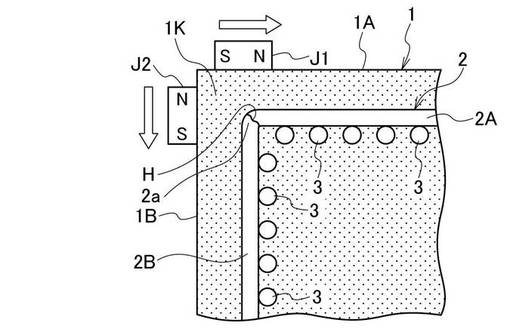
図14は2つの磁石J1,J2を用いて主鉄筋2の鉄筋部2A,2Bの磁化を同時に行う方法を示したものである。
【0062】
すなわち、磁石J1,J2をコンクリート体1の上面1Aおよび側面1Bに沿ってそれぞれ矢印方向に同時に移動させることにより、主鉄筋2の鉄筋部2A,2Bの磁化を同時に行うものである。これにより、主鉄筋2の屈曲部2aを一様に磁化させることができる。
[他の着磁方法2]
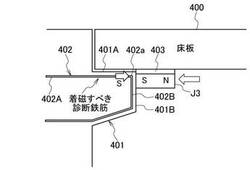
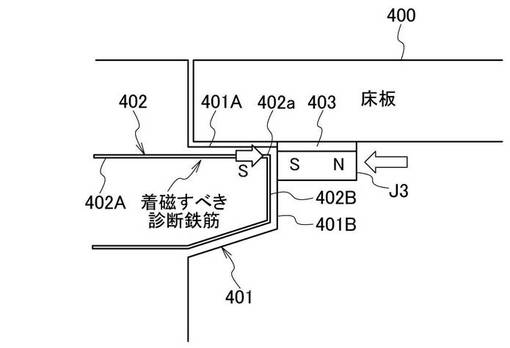
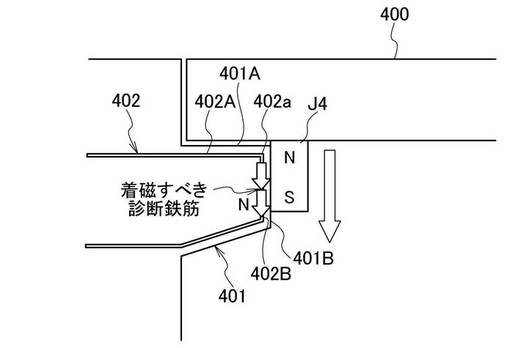
図15は、床板400があることにより、コンクリート体401の上面401Aから鉄筋402の鉄筋部402Aを着磁できない場合の着磁方法を示したものである。
【0063】
この鉄筋402の鉄筋部402Aの着磁方法は、コンクリート体401の側面401Bより所定距離離れた位置から鉄筋部402Aの延長線上に沿って磁石J3を移動させていく。このとき、磁石J3の向きは鉄筋部402Aの延長線上に合わせておく。つまり、磁石J3のN,S磁極は鉄筋部402Aの延長線上に位置させておく。
【0064】
磁石J3の延長線上の移動により、その鉄筋402の鉄筋部402Aが磁化されていく。この際、床板400内の鉄筋(図示せず)が磁化することによる影響をなくすために、磁石J3の上面(図15において)に磁気シール部材403を予め貼り付けておくのもよい。
【0065】
鉄筋402の鉄筋部402Aの磁化が終了したら、磁石J3を鉄筋部402Aの延長線上に沿って着磁の際と反対方向へ移動または横方向にスライドさせて遠ざける。次に、図16に示すように別な磁石J4を図示の状態で右方から移動させてきてコンクリート体401の側面401Bに沿わせた後、この磁石J4をコンクリート体401の側面401Bに沿って下方に移動させて鉄筋部402Bを磁化させる。この磁化により、鉄筋402の屈曲部402aを一様に磁化することができる。この際、床板400内の鉄筋(図示せず)が磁化することによる影響をなくすために、磁石J4の左側面(図16において)に磁気シールド部材(図示せず)を予め貼り付けておくか、磁石J4の上下方向の長さを短くする。
【0066】
この後、非破壊検査装置20,120,220のいずれかの磁気検知部11,111,211をコンクリート体401の側面401Bに沿って移動させて磁束密度を計測することにより、鉄筋402の屈曲部402aの破断の有無を検査することができる。
【0067】
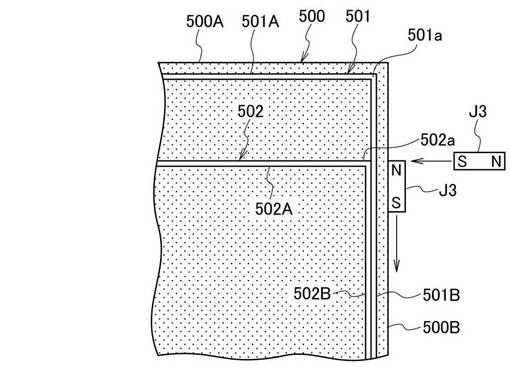
図17に示すコンクリート体500の鉄筋502の屈曲部502aの破断の有無も上記の着磁方法により検査することが可能となる。つまり、コンクリート体500の上面500Aから深い位置にある鉄筋502の屈曲部502aの破断の有無を検査することができる。
【0068】
この検査は、先ず鉄筋501の鉄筋部501A,501Bを上述のいずれかの方法で磁化し、この後、磁石J3をコンクリート体500の側面500Bより所定距離離れた位置から鉄筋部502Aの延長線上に沿って磁石J3を移動させて、鉄筋部502Aを磁化させる。この後、磁石J3の向きを変えて図17に示すようにコンクリート体500の側面500Bに沿わせ、この磁石J3をその側面に沿って下方に移動させて鉄筋部502Bを磁化させる。
【0069】
そして、コンクリート体500の角部から、すなわちコンクリート体500の側面500Bの上端から、非破壊検査装置20,120,220のいずれかの磁気検知部11,111,211を移動させて磁束密度を計測していき、鉄筋501の屈曲部501aと鉄筋502の屈曲部502aの破断の有無を検査する。
【0070】
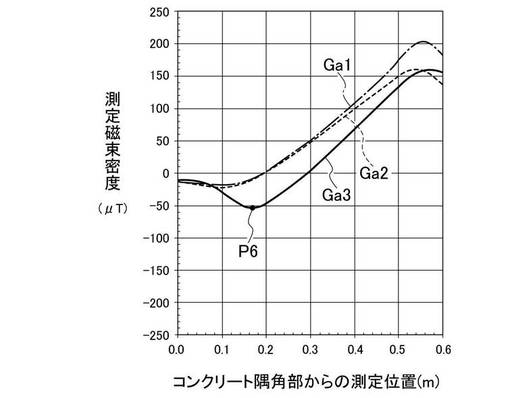
図18はコンクリート体500の側面500Bの磁束密度(側面500Bに直交する方向の磁束密度)を測定したグラフGa1,Ga2,Ga3を示す。
【0071】
グラフGa1,Ga2は鉄筋502の屈曲部502aに破断がない場合のグラフであり、グラフGa3は鉄筋502の屈曲部502aに破断がある場合のグラフである。
【0072】
このグラフGa3から分かるように、鉄筋502の屈曲部502aの位置でマイナスのピークP6が現れる。このピークP6により鉄筋502の屈曲部502aに破損があることが分かる。
【0073】
鉄筋502の屈曲部502aの破断の有無だけを検査する場合には、鉄筋部501Bだけを磁化させた後、上記のようにして鉄筋部502A,502Bを磁化させて検査を行えばよい。
【0074】
上記実施例では、いずれも非破壊検査装置20,120,220の磁気検知部11,111,211をコンクリート体の角部から移動させて磁束密度の測定を行っているが、その逆方向から角部へ移動させて磁束密度を測定しても差し支えない。
【符号の説明】
【0075】
401 コンクリート体
401A 表面
401B 表面
402 鉄筋
402A 鉄筋部
402B 鉄筋部
402a 屈曲部
J3 磁石
【技術分野】
【0001】
この発明は、例えば橋脚などのコンクリート体内に設けられている鉄筋の破断の有無を検出する非破壊検査方法と非破壊検査装置に関する。
【背景技術】
【0002】
従来から、コンクリート内の鉄筋の欠陥を検出する非破壊検査方法が知られている(特許文献1参照)。
【0003】
かかる非破壊検査方法は、コンクリートに埋設された鉄筋にバイアス磁場によって長手方向に沿って平行に磁化し、鉄筋の欠損部により発生する漏洩磁束を測定して欠損部を検出するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−294850号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、このような非破壊検査方法にあっては、鉄筋が屈曲されている場合、その屈曲部で漏洩磁界の向きが複雑になることにより、その屈曲部での破断を検出することができないという問題があった。また、コンクリートの被りが深いと鉄筋の磁化も難しく、その漏洩磁束の検出も難しいという問題があった。
【0006】
この発明の目的は、コンクリートの被りの深さに拘わりなく鉄筋の屈曲部の破断を確実に検出することのできる非破壊検査方法と非破壊検査装置を提供することにある。
【課題を解決するための手段】
【0007】
請求項1の発明は、コンクリート体内に設けられるとともにそのコンクリート体の表面に沿って延び且つそのコンクリート体の角部で屈曲させてある鉄筋を、そのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記コンクリート体の角部の一方側の表面位置から前記鉄筋の一方の鉄筋部を磁化させることができない場合、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする。
請求項2の発明は、コンクリート体内に設けられる屈曲部と、この屈曲部からコンクリート体の角部の一方側の表面に沿って延びるとともにその一方側の表面から深い位置に配置される一方の鉄筋部と、前記屈曲部からコンクリート体の他方側の表面に沿って延びるとともにその他方側の表面から浅い位置に配置される他方の鉄筋部とを有する鉄筋をそのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする。
請求項5の発明は、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度を求める演算手段と、
この演算手段が求める磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする。
請求項6の発明は、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向と直交する直交方向成分の磁束密度を求める演算手段と、
この演算手段が求める直交方向成分の磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記前記移動位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする。
請求項7の発明は、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度と、前記鉄筋部の長手方向と直交する直交方向成分の磁束密度とを求める演算手段と、
この演算手段が求める前記長手方向成分の磁束密度のピークと前記直交方向成分の磁束密度のピークとを検出するピーク検出手段と、
このピーク検出手段が前記長手方向成分の磁束密度のピークを検出したときの前記移動位置検出手段が検出する位置と、前記ピーク検出手段が前記直交方向成分の磁束密度のピークを検出したときの前記前記移動位置検出手段が検出する位置とに基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする。
【発明の効果】
【0008】
この発明によれば、コンクリートの被りの深さに拘わりなく鉄筋の屈曲部の破断を確実に検出することができる。
【図面の簡単な説明】
【0009】
【図1】鉄筋の磁化の方法を示した説明図である。
【図2】非破壊検査装置の構成を示したブロック図である。
【図3】鉄筋の屈曲部に破断を有する場合とない場合の水平方向成分の磁束密度を示したグラフである。
【図4】第2実施例の非破壊検査装置の構成を示したブロック図である。
【図5】鉄筋の屈曲部に破断を有する場合とない場合の水平方向成分と垂直方向成分の磁束密度を示したグラフである。
【図6】コンクリート体の上面から鉄筋部を磁化させる場合を示した説明図である。
【図7】コンクリート体の側面から鉄筋部を磁化させる場合を示した説明図である。
【図8】コンクリート体の上面の次に側面から磁化させ、この場合の上面の垂直方向の磁束密度を測定したときのグラフである。
【図9】コンクリート体の上面の次に側面から磁化させ、この場合の側面の垂直方向の磁束密度を測定したときのグラフである。
【図10】コンクリート体の上面の次に側面から磁化させ、再度上面から磁化してその上面の垂直方向の磁束密度を測定したときのグラフである。
【図11】コンクリート体の上面の次に側面から磁化させ、再度上面から磁化してその側面の垂直方向の磁束密度を測定したときのグラフである。
【図12】第3実施例の非破壊検査装置の構成を示したブロック図である。
【図13】コンクリート体の角部の他の着磁方法を示した説明図である。
【図14】コンクリート体の角部の別な他の着磁方法を示した説明図である。
【図15】コンクリート体の上面から着磁できない場合の着磁方法示した説明図である。
【図16】コンクリート体の上面から着磁できない場合の磁石の移動を示した説明図である。
【図17】別な例のコンクリート体の鉄筋の配置を示した説明図である。
【図18】図17に示すコンクリート体の側面から測定した磁束密度のグラフを示す。
【発明を実施するための形態】
【0010】
以下、この発明に係る非破壊検査方法と非破壊検査装置の実施の形態である実施例を図面に基づいて説明する。
【実施例】
【0011】
[第1実施例]
図1において、1は例えば橋脚のコンクリート体であり、このコンクリート体1内には主鉄筋(鉄筋)2が設けられており、この主鉄筋2はコンクリート体1の角部1Kで屈曲された屈曲部2aを有している。3は補助鉄筋である。
【0012】
この主鉄筋2の屈曲部2aで破断Hが発生し易く、この屈曲部2aの破断Hを検出する非破壊検査方法について説明する。なお、主鉄筋2の位置や屈曲部2aの位置は既知である。
【0013】
先ず、図1に示すコンクリート体1の角部1KにL字形の磁石ユニット5を置く。
【0014】
この磁石ユニット5は、主鉄筋2の左右方向に延びた一方の鉄筋部2Aに沿った配置される長い磁石4Aと、主鉄筋2の上下方向に延びた他方の鉄筋部2Bに沿って配置される長い磁石4Bと、これら磁石4A,4Bを保持したL字形の非磁性体からなる保持部材6とを有している。
【0015】
磁石4A,4Bは、例えばNd系のような希土類金属からなる永久磁石であるが電磁石であってもよい。磁石4Aは、例えば一端(右端)がN極であり、他端がS極となっている。また、磁石4Bは、磁石4Aの他端がS極の場合、その上端がN極であり、下端がS極となる。磁石4Aの他端がN極の場合には、磁石4Bの磁極はその逆となる。
【0016】
磁石ユニット5は、例えば矢印方向からコンクリート体1の角部1Kに置く。これにより、磁石ユニット5の磁石4Aがコンクリート体1の上面(表面)1Aに載置(当接)され、磁石4Bがコンクリート体1の側面1Bに当接される。そして、主鉄筋2の鉄筋部2A,2Bは長手方向に沿って磁石4A,4Bにより同時に磁化、すなわち同時に着磁される。この同時の着磁により、鉄筋2の屈曲部2aを一様に磁化させることができることになる。
【0017】
また、鉄筋部2A,2Bすなわち主鉄筋2は磁極の向きが同一となるように磁化されることになる。
【0018】
主鉄筋2の鉄筋部2A,2Bの着磁が終了したら、磁石ユニット5を上記の矢印と反対方向に移動または横にスライドさせて遠ざける。
【0019】
次に、コンコリート体1の面(上面)1Aに対して水平方向の漏洩磁束密度をその面1Aの各位置ごとに磁気センサ10により検出していく。この磁気センサ10は、高感度の例えばMIセンサあるいはフラックスゲート型センサである。
【0020】
漏洩磁束の測定は、図2に示すように磁気センサ10をコンクリート体1の面1A上に沿って移動させながら行う。すなわち、コンクリート体1の左端から右端方向へ所定距離の範囲について行い、その磁気センサ10の移動方向は図2の実線位置から矢印方向へ移動させてもよく、逆に左側からコンクリート体1の右端位置へ移動させてもよい。
【0021】
同様に、磁気センサ10をコンクリート体1の面1B上に沿って、コンクリート体1の上端(図2において)から下方へ所定距離の範囲について行い、その磁気センサ10の移動方向は上下(図2において)のどちらでもよい。
【0022】
図2に示す20は主鉄筋2の屈曲部2aの破断Hを検出する非破壊検査装置である。
【0023】
非破壊検査装置20は、X方向の磁気を検出する磁気センサ10を有する磁気検知部11と、この磁気センサ10が検出する検出信号からコンクリート体1の面1A,1Bに平行な方向の磁束密度を演算して求める演算回路21と、この演算回路21が演算した磁束密度をグラフにして表示する表示部22とを備えている。
【0024】
磁気検知部11は、この磁気検知部11の移動距離を求める距離センサ(図示せず)が組み込まれている。
【0025】
演算回路21は、距離センサが求める移動距離に対応してコンクリート体1の面1A,1Bの各位置における面1A,1Bと平行な磁束密度、すなわち主鉄筋2の長手方向である鉄筋部2A,2Bの長手方向成分の磁束密度を求めるものである。
【0026】
上述のようにして主鉄筋2の鉄筋部2A,2Bを磁化させた後、この主鉄筋2の鉄筋部2Aに沿って磁気検知部11をコンクリート体1の面1A上を移動させると、すなわち、X軸方向に沿って移動させていくと、図3に示すように、コンクリート体1の面1Aの各位置における磁束密度(面1Aと平行な磁束密度:X方向の磁束密度)が求められていく。
【0027】
図3に示すグラフG1が主鉄筋2の屈曲部2aに破断Hがない健全な場合の磁束密度であり、グラフG2が屈曲部2aに破断Hがある場合の磁束密度を示す。このように、屈曲部2aに破断Hがあると、グラフG2にマイナス方向にピークP1(谷部)が生じる。また、鉄筋2の屈曲部2aに破断Hがある場合には、その屈曲部2aの位置やこの近傍でマイナス方向のピークP1が生じることも分かった。
【0028】
このグラフG1またはG2は表示部22に表示される。このピークP1はコンクリートの被りが深くても検出することができる。
【0029】
これに対して、屈曲部2aに破断Hがない場合には、グラフG1で示すようにピークは生じない。
【0030】
したがって、ピークP1があるかないかで破断Hの有無を判断(判定)することができ、しかもそのピークP1の位置を特定することにより、破断Hの有無を確実に判断することができることになる。つまり、ピークP1が生じていても、そのピークP1の位置が屈曲部2aの位置から大きくずれていれば、そのピークP1は屈曲部2aの破断以外の要因で生じたものであり、屈曲部2aに破断が生じていないことが分かり、破断Hの有無の判断がより確実なものとなる。
【0031】
ピークP1の有無の判断は表示部22に表示されるグラフG1,G2からオペレータが判断してもよく、ピーク検出回路(判定手段)を用いてそのピークを検出して破断Hの有無を判断してもよい。
[第2実施例]
図4は第2実施例の非破壊検査装置120の構成を示す。この非破壊検査装置120は、X方向(面と平行な方向)およびZ方向(面に垂直な方向)の磁気を検出する磁気センサ110を有する磁気検知部111と、この磁気センサ110が検出する検出信号からコンクリート体1の面1Aと平行な磁束密度とその面1Aと直交する方向(Z方向)の磁束密度とを演算して求める演算回路121と、この演算回路121が演算した磁束密度をグラフにして表示する表示部122とを備えている。
【0032】
磁気検知部111は、この磁気検知部111の移動距離を求める距離センサ(図示せず)が組み込まれている。
【0033】
この非破壊検査装置120で検査する場合も、上述のように主鉄筋2の鉄筋部2A,2Bを同時に磁化させて検査する。
【0034】
表示部122には、図5に示すように、Z方向の磁束密度のグラフを示す画面122Aと、X方向の磁束密度のグラフを示す画面122Bとが表示される。
【0035】
画面122Aには、磁気検知部111をコンクリート体1の面1A上を移動させていった場合、Z方向の磁束密度を示すグラフG3またはグラフG4が表示され、画面122BにはX方向の磁束密度を示すグラフG5またはグラフG6が表示される。
【0036】
グラフG3は鉄筋2の屈曲部2aに破断がない場合のグラフであり、G4は鉄筋2の屈曲部2aに破断Hがある場合のグラフである。グラフG5は鉄筋2の屈曲部2aに破断がない場合のグラフであり、G6は鉄筋2の屈曲部2aに破断Hがある場合のグラフである。
【0037】
このグラフG3,G4から分かるように、鉄筋2の屈曲部2aに破断HがあるとグラフG4にプラス方向のピークP2が生じる。また、鉄筋2の屈曲部2aに破断Hがある場合には、その屈曲部2aの位置から所定距離離れた範囲内でピークP2が生じることも分かった。
【0038】
また、グラフG3は鉄筋2の屈曲部2aに破断がない場合でも、グラフG3aに示すように屈曲部2aの位置付近でピークPaを示す場合がある。
【0039】
グラフG5,G6は、図3に示すグラフG1,G2と同様なものとなり、鉄筋2の屈曲部2aに破断Hがある場合、その屈曲部2aの位置でグラフG6にマイナス方向のピークP3が生じる。
【0040】
これらピークP2,P3の有無とピークP2,P3の位置とによって、鉄筋2の屈曲部2aに破断Hの有無をより確実に検出することができることになる。
【0041】
例えば、鉄筋2の屈曲部2aに破断がないのに、画面122AのグラフG3aに示すようにピークPaが生じた場合、画面122AのグラフG3aだけで判断すると破断Hがあると判断してしまうが、破断Hがない場合には画面122BにX方向の磁束密度を示すグラフG5が表示されるので、破断Hがないことが分かり、誤検出を防止することができる。
【0042】
また、グラフG4,G6のどちらか一方にピークが有り、グラフG4のピークの位置が屈曲部2aの位置から所定距離離れた範囲内、あるいはグラフG6のピーク位置が屈曲部2aの位置付近であるか否かで破断Hの有無を確実に検出することができることになる。
【0043】
ピークP2,P3の有無の判断は表示部122に表示されるグラフG3〜G6からオペレータが判断してもよい。また、ピーク検出回路を用いてピークを検出し、ピーク位置検出手段を用いてそのピークの位置を求め、ピークの有無とピークの位置とに基づいてマイクロコンピュータ(判定手段)等により破断Hの有無を判定するようにしてもよい。
【0044】
ところで、主鉄筋2の鉄筋部2A,2Bを同時に磁化させて鉄筋2の屈曲部2aを一様に磁化させているが、これは、例えば図6および図7に示すように、先ず最初にコンクリート体1の上面1A上に沿って磁石Jを移動させ、次にコンクリート体1の側面1B上に沿って磁石Jを移動させて主鉄筋2の鉄筋部2A,2Bを磁化させると、鉄筋2の屈曲部2aが一様に磁化されず、破断Hが生じてない健全な鉄筋であっても磁束密度の測定波形にピークが生じてしまうことがあるからである。このような場合、破断Hの有無の判定の分析のために長時間要してしまう。
【0045】
例えば、上述のようにコンクリート体1の上面1Aに沿って磁石Jを移動させ、次にコンクリート体1の側面1B上に沿って磁石Jを移動させた後に、磁気検知部11を上面1A上を移動させて、上面1Aに直交する磁束密度を測定すると、図8に示すグラフG7,G8が得られる。グラフG7は主鉄筋2の屈曲部2aに破断Hが有る場合のグラフであり、グラフG8は主鉄筋2の屈曲部2aに破断がない場合のグラフである。
【0046】
このように、主鉄筋2の屈曲部2aに破断があってもピークが明確に現れないので、破断Hの有無の判定がしづらいものとなる。
【0047】
図9は、上記のようにして主鉄筋2を磁化させた後に、コンクリート体1の側面1Bに沿って磁気検知部11を移動させて、コンクリート体1の側面1Bに直交する磁束密度を測定した場合のグラフG9,G10を示す。
【0048】
グラフG9は主鉄筋2の屈曲部2aに破断Hがある場合のグラフであり、グラフG10は主鉄筋2の屈曲部2aに破断Hがない場合のグラフである。
【0049】
グラフG9にはピークP4が明確に現れる。これは、鉄筋部2Bが一様に磁化されたことによる。一方、この鉄筋部2Bの磁化の際に、既に一様に磁化された鉄筋部2Aがその磁化の影響を受けて、鉄筋部2Aは一様に磁化された状態でなくなってしまうため、図8に示すグラフG7,G8となる。
【0050】
図10は、再度コンクリート体1の上面1Aから鉄筋部2Aを着磁し、この上面1A側の垂直方向の磁束密度を測定したグラフG11,G12を示す。グラフG11が主鉄筋2の屈曲部2aに破断Hがある場合のグラフであり、グラフG12がその屈曲部2aに破断がない場合のグラフである。グラフG11にはピークP5が明確に現れる。
【0051】
図11は、コンクリート体1の上面1Aから鉄筋部2Aを再度着磁した後に、コンクリート体1の側面1B側からこの側面1Bと直交する方向の磁束密度を測定したグラフG13,G14を示す。グラフG13が主鉄筋2の屈曲部2aに破断Hがある場合のグラフであり、グラフG14がその屈曲部2aに破断がない場合のグラフである。
【0052】
このように、図8のグラフG7,G8と図11のグラフG13,G14とが対称的となり、図9のグラフG9,G10と図10のグラフG11,G12とが対称的となっている。しかし、図8のグラフG7,G8と図9のグラフG9,G10および図10のグラフG11,G12と図11のグラフG13,G14は対称的にならない。また、グラフG7,G8,G13,G14からでは破断Hを検出することは難しいものとなる。
【0053】
また、上述のようにコンクリート体1の側面1Bの磁束密度を測定する場合、再度その側面1Bから鉄筋部2Bを磁化させなければならず、また、この測定の後、コンクリート体1の上面1Aの磁束密度を測定する場合には、この上面1Aから鉄筋部2Aを磁化させなければならない。このように、測定する面1A,1Bを変える毎に磁化させる作業が必要となる。
【0054】
上記第1,第2実施例では、鉄筋2の鉄筋部2A,2Bを同時に着磁するので、鉄筋2の屈曲部2aを一様に磁化させることができ、このため、測定する面1A,1Bを変える毎に磁化させる作業は不要となる。
[第3実施例]
図12は第3実施例の非破壊検査装置220の構成を示す。この非破壊検査装置220は、X方向の磁気を検出する磁気センサ210Xと、Z方向の磁気を検出する磁気センサ210Zとを有する磁気検知部211と、磁気センサ210X210Zが検出する検出信号からコンクリート体1の面1Aと平行な方向(X方向)の磁束密度とその面1Aと直交する方向(Z方向)の磁束密度とを演算して求める演算回路221と、この演算回路221が演算した磁束密度をグラフにして表示する表示部222とを備えている。磁気検知部211は、この磁気検知部211の移動距離を求める距離センサ(図示せず)が組み込まれている。
【0055】
この非破壊検査装置220で検査する場合も、第1実施例と同様に主鉄筋2の鉄筋部2A,2Bを同時に磁化させて検査する。
【0056】
この非破壊検査装置220もピークの有無の判断は表示部222に表示されるグラフからオペレータが判断してもよく、ピーク検出回路(判定手段)を用いてそのピークを検出して破断Hの有無を判断してもよい。
[他の着磁方法1]
図13は小型の磁石ユニット305を用いて主鉄筋2の屈曲部2aを一様に磁化せる場合の例を示す。
【0057】
磁石ユニット305は、主鉄筋2の左右方向に延びた一方の鉄筋部2Aに沿って配置される磁石304Aと、主鉄筋2の上下方向に延びた他方の鉄筋部2Bに沿って配置される磁石304Bと、これら磁石304A,304Bを保持したL字形の非磁性体からなる保持部材306とを有している。
【0058】
この磁石ユニット305で着磁を行うには、先ず、図6および図7に示すように、磁石Jによって主鉄筋2の鉄筋部2A,2Bを磁化させる。このとき、磁石Jの向きを磁石ユニット305の磁石304A,304Bの向きと同一となるようにする。
【0059】
主鉄筋2の鉄筋部2A,2Bの磁化が終了したら、磁石ユニット305を例えば矢印方向からコンクリート体1の角部1Kに置く。これにより、鉄筋2の屈曲部2aを一様に磁化させることができる。この磁化が終了したら、磁石ユニット305を磁石ユニット5と同様にしてコンクリート体1の角部1Kから遠ざける。
【0060】
この後、非破壊検査装置20,120,220によって主鉄筋2の屈曲部2aの破断Hの有無を検査する。
【0061】
図14は2つの磁石J1,J2を用いて主鉄筋2の鉄筋部2A,2Bの磁化を同時に行う方法を示したものである。
【0062】
すなわち、磁石J1,J2をコンクリート体1の上面1Aおよび側面1Bに沿ってそれぞれ矢印方向に同時に移動させることにより、主鉄筋2の鉄筋部2A,2Bの磁化を同時に行うものである。これにより、主鉄筋2の屈曲部2aを一様に磁化させることができる。
[他の着磁方法2]
図15は、床板400があることにより、コンクリート体401の上面401Aから鉄筋402の鉄筋部402Aを着磁できない場合の着磁方法を示したものである。
【0063】
この鉄筋402の鉄筋部402Aの着磁方法は、コンクリート体401の側面401Bより所定距離離れた位置から鉄筋部402Aの延長線上に沿って磁石J3を移動させていく。このとき、磁石J3の向きは鉄筋部402Aの延長線上に合わせておく。つまり、磁石J3のN,S磁極は鉄筋部402Aの延長線上に位置させておく。
【0064】
磁石J3の延長線上の移動により、その鉄筋402の鉄筋部402Aが磁化されていく。この際、床板400内の鉄筋(図示せず)が磁化することによる影響をなくすために、磁石J3の上面(図15において)に磁気シール部材403を予め貼り付けておくのもよい。
【0065】
鉄筋402の鉄筋部402Aの磁化が終了したら、磁石J3を鉄筋部402Aの延長線上に沿って着磁の際と反対方向へ移動または横方向にスライドさせて遠ざける。次に、図16に示すように別な磁石J4を図示の状態で右方から移動させてきてコンクリート体401の側面401Bに沿わせた後、この磁石J4をコンクリート体401の側面401Bに沿って下方に移動させて鉄筋部402Bを磁化させる。この磁化により、鉄筋402の屈曲部402aを一様に磁化することができる。この際、床板400内の鉄筋(図示せず)が磁化することによる影響をなくすために、磁石J4の左側面(図16において)に磁気シールド部材(図示せず)を予め貼り付けておくか、磁石J4の上下方向の長さを短くする。
【0066】
この後、非破壊検査装置20,120,220のいずれかの磁気検知部11,111,211をコンクリート体401の側面401Bに沿って移動させて磁束密度を計測することにより、鉄筋402の屈曲部402aの破断の有無を検査することができる。
【0067】
図17に示すコンクリート体500の鉄筋502の屈曲部502aの破断の有無も上記の着磁方法により検査することが可能となる。つまり、コンクリート体500の上面500Aから深い位置にある鉄筋502の屈曲部502aの破断の有無を検査することができる。
【0068】
この検査は、先ず鉄筋501の鉄筋部501A,501Bを上述のいずれかの方法で磁化し、この後、磁石J3をコンクリート体500の側面500Bより所定距離離れた位置から鉄筋部502Aの延長線上に沿って磁石J3を移動させて、鉄筋部502Aを磁化させる。この後、磁石J3の向きを変えて図17に示すようにコンクリート体500の側面500Bに沿わせ、この磁石J3をその側面に沿って下方に移動させて鉄筋部502Bを磁化させる。
【0069】
そして、コンクリート体500の角部から、すなわちコンクリート体500の側面500Bの上端から、非破壊検査装置20,120,220のいずれかの磁気検知部11,111,211を移動させて磁束密度を計測していき、鉄筋501の屈曲部501aと鉄筋502の屈曲部502aの破断の有無を検査する。
【0070】
図18はコンクリート体500の側面500Bの磁束密度(側面500Bに直交する方向の磁束密度)を測定したグラフGa1,Ga2,Ga3を示す。
【0071】
グラフGa1,Ga2は鉄筋502の屈曲部502aに破断がない場合のグラフであり、グラフGa3は鉄筋502の屈曲部502aに破断がある場合のグラフである。
【0072】
このグラフGa3から分かるように、鉄筋502の屈曲部502aの位置でマイナスのピークP6が現れる。このピークP6により鉄筋502の屈曲部502aに破損があることが分かる。
【0073】
鉄筋502の屈曲部502aの破断の有無だけを検査する場合には、鉄筋部501Bだけを磁化させた後、上記のようにして鉄筋部502A,502Bを磁化させて検査を行えばよい。
【0074】
上記実施例では、いずれも非破壊検査装置20,120,220の磁気検知部11,111,211をコンクリート体の角部から移動させて磁束密度の測定を行っているが、その逆方向から角部へ移動させて磁束密度を測定しても差し支えない。
【符号の説明】
【0075】
401 コンクリート体
401A 表面
401B 表面
402 鉄筋
402A 鉄筋部
402B 鉄筋部
402a 屈曲部
J3 磁石
【特許請求の範囲】
【請求項1】
コンクリート体内に設けられるとともにそのコンクリート体の表面に沿って延び且つそのコンクリート体の角部で屈曲させてある鉄筋を、そのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記コンクリート体の角部の一方側の表面位置から前記鉄筋の一方の鉄筋部を磁化させることができない場合、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする非破壊検査方法。
【請求項2】
コンクリート体内に設けられる屈曲部と、この屈曲部からコンクリート体の角部の一方側の表面に沿って延びるとともにその一方側の表面から深い位置に配置される一方の鉄筋部と、前記屈曲部からコンクリート体の他方側の表面に沿って延びるとともにその他方側の表面から浅い位置に配置される他方の鉄筋部とを有する鉄筋をそのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする非破壊検査方法。
【請求項3】
前記鉄筋を長手方向に沿って磁化させた後、前記コンクリート体の他方側の表面上を前記他方の鉄筋部の長手方向に沿って磁気センサを移動させて、前記鉄筋の長手方向成分の磁束密度を測定して、磁束密度のピークの有無を検出し、このピークの有無とそのピークの位置とから前記屈曲部の破断の有無を検出することを特徴とする請求項1または請求項2に記載の非破壊検査方法。
【請求項4】
前記鉄筋を長手方向に沿って磁化させた後、前記コンクリート体の他方側の表面上を前記他方の鉄筋部の長手方向に沿って磁気センサを移動させて、前記鉄筋の長手方向と直交する直交成分の磁束密度を測定して、磁束密度のピークの有無を検出し、このピークの有無とそのピークの位置とから前記屈曲部の破断の有無を検出することを特徴とする請求項1または請求項2に記載の非破壊検査方法。
【請求項5】
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度を求める演算手段と、
この演算手段が求める磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする非破壊検査装置。
【請求項6】
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向と直交する直交方向成分の磁束密度を求める演算手段と、
この演算手段が求める直交方向成分の磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記前記移動位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする非破壊検査装置。
【請求項7】
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度と、前記 鉄筋部の長手方向と直交する直交方向成分の磁束密度とを求める演算手段と、
この演算手段が求める前記長手方向成分の磁束密度のピークと前記直交方向成分の磁束密度のピークとを検出するピーク検出手段と、
このピーク検出手段が前記長手方向成分の磁束密度のピークを検出したときの前記移動位置検出手段が検出する位置と、前記ピーク検出手段が前記直交方向成分の磁束密度のピークを検出したときの前記前記移動位置検出手段が検出する位置とに基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする非破壊検査装置。
【請求項1】
コンクリート体内に設けられるとともにそのコンクリート体の表面に沿って延び且つそのコンクリート体の角部で屈曲させてある鉄筋を、そのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記コンクリート体の角部の一方側の表面位置から前記鉄筋の一方の鉄筋部を磁化させることができない場合、前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする非破壊検査方法。
【請求項2】
コンクリート体内に設けられる屈曲部と、この屈曲部からコンクリート体の角部の一方側の表面に沿って延びるとともにその一方側の表面から深い位置に配置される一方の鉄筋部と、前記屈曲部からコンクリート体の他方側の表面に沿って延びるとともにその他方側の表面から浅い位置に配置される他方の鉄筋部とを有する鉄筋をそのコンクリート体の外側から磁石により磁化し、この後そのコンクリート体上の磁束密度を測定することによって前記鉄筋の屈曲部の破断の有無を検出する非破壊検査方法であって、
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、
この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させることを特徴とする非破壊検査方法。
【請求項3】
前記鉄筋を長手方向に沿って磁化させた後、前記コンクリート体の他方側の表面上を前記他方の鉄筋部の長手方向に沿って磁気センサを移動させて、前記鉄筋の長手方向成分の磁束密度を測定して、磁束密度のピークの有無を検出し、このピークの有無とそのピークの位置とから前記屈曲部の破断の有無を検出することを特徴とする請求項1または請求項2に記載の非破壊検査方法。
【請求項4】
前記鉄筋を長手方向に沿って磁化させた後、前記コンクリート体の他方側の表面上を前記他方の鉄筋部の長手方向に沿って磁気センサを移動させて、前記鉄筋の長手方向と直交する直交成分の磁束密度を測定して、磁束密度のピークの有無を検出し、このピークの有無とそのピークの位置とから前記屈曲部の破断の有無を検出することを特徴とする請求項1または請求項2に記載の非破壊検査方法。
【請求項5】
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋部を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度を求める演算手段と、
この演算手段が求める磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする非破壊検査装置。
【請求項6】
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向と直交する直交方向成分の磁束密度を求める演算手段と、
この演算手段が求める直交方向成分の磁束密度のピークを検出するピーク検出手段と、
このピーク検出手段がピークを検出したとき、前記前記移動位置検出手段が検出する位置に基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする非破壊検査装置。
【請求項7】
前記磁石の向きを前記一方の鉄筋部の長手方向に一致させるとともに、該磁石を前記コンクリート体の角部の他方側の表面より所定距離離間した位置からその表面に向かって磁石を移動させることにより、前記一方の鉄筋部を長手方向に沿って磁化させ、この後に、前記磁石の向きを前記他方の鉄筋部の長手方向に一致させ、該磁石を前記角部の他方側の表面に沿って移動させることにより、前記他方の鉄筋を長手方向に沿って磁化させる請求項1または請求項2に記載の方法によって鉄筋を磁化させた後に、
前記コンクリート体の他方側の表面上を鉄筋部の長手方向に沿って移動させる磁気センサと、
前記磁気センサの移動位置を求める移動位置検出手段と、
前記磁気センサが検出する検出信号から前記鉄筋部の長手方向成分の磁束密度と、前記 鉄筋部の長手方向と直交する直交方向成分の磁束密度とを求める演算手段と、
この演算手段が求める前記長手方向成分の磁束密度のピークと前記直交方向成分の磁束密度のピークとを検出するピーク検出手段と、
このピーク検出手段が前記長手方向成分の磁束密度のピークを検出したときの前記移動位置検出手段が検出する位置と、前記ピーク検出手段が前記直交方向成分の磁束密度のピークを検出したときの前記前記移動位置検出手段が検出する位置とに基づいて前記屈曲部に破断があると判定する判定手段とを備えたことを特徴とする非破壊検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−76714(P2013−76714A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2013−12878(P2013−12878)
【出願日】平成25年1月28日(2013.1.28)
【分割の表示】特願2008−330287(P2008−330287)の分割
【原出願日】平成20年12月25日(2008.12.25)
【出願人】(000144991)株式会社四国総合研究所 (116)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成25年1月28日(2013.1.28)
【分割の表示】特願2008−330287(P2008−330287)の分割
【原出願日】平成20年12月25日(2008.12.25)
【出願人】(000144991)株式会社四国総合研究所 (116)
【Fターム(参考)】
[ Back to top ]