
靴底
【課題】あおり運動を促進する靴底の提供
【解決手段】歩行時のベクトル方向が切り替わる境界線CL1を規準にして、靴底を領域R1〜R5に分割し、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する突起1の斜面5を、それぞれ、領域R1〜R5において、適切に、爪先方向または踵方向に向けて突設して構成し、あおり運動の軌道に沿って床反力に対してぶれにくい安定したものにする。
【解決手段】歩行時のベクトル方向が切り替わる境界線CL1を規準にして、靴底を領域R1〜R5に分割し、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する突起1の斜面5を、それぞれ、領域R1〜R5において、適切に、爪先方向または踵方向に向けて突設して構成し、あおり運動の軌道に沿って床反力に対してぶれにくい安定したものにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は靴底に関する。より詳細に述べれば、本発明は、あおり運動を促進させるような構造の靴底に関する。
【背景技術】
【0002】
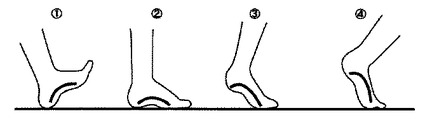
図1はヒトが歩行或いは走行する際の足の運動を大まかに▲1▼〜▲4▼の4つのステップに分解した図である。図1−1は、にヒトが歩行或いは走行するときの運動を▲1▼〜▲4▼の4つのステップに分解し、それぞれのステップにおける足の部位と、曲線で示した縦方向アーチの連動状態を示す概念図である。ステップ▲1▼で、膝を伸ばして踵から着地する。ステップ▲2▼で、踵にかかった重心は外側アーチに沿って移動し、踵と踏みつけ部が着地する。ステップ▲3▼で、外側アーチに沿って移動した重心は第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行する。ステップ▲4▼で、ステップ▲3▼で母趾側に移動した重心は、親指の方向に抜けていき、母趾と第2趾を使って地面を蹴る。この連続した体重の移動を「あおり運動」という。換言すれば、「あおり運動」は、足の回外運動と回内運動の二つの運動が組み合わさった運動で、足の縦アーチと横アーチを利用することにより、足が歩行中に荷重中心を後方→前方へと移動させながら同時に内側⇔外側にもヒラヒラと移動させる運動をいうこともできる。
【0003】
上述した歩行或いは走行する際の足の運動状態を足に負荷される足圧の分布状態から検討する。図1−2は、ヒトが歩行或いは走行する際の足に負荷される、いわゆる足圧の分布状態を足圧分布測定システム「Fスキャン」で測定した結果を、図1−1の▲1▼〜▲4▼の4つのステップに圧縮して図に画き起こしたものである。図1−2に示したように、ステップ▲1▼で、膝を伸ばして踵から着地すると、踵骨の中心に最も大きな足圧が負荷され、ほぼ等間隔で足圧が低減し、ステップ▲1▼で踵にかかった足圧はステップ▲2▼外側アーチに沿って踏みつけ部に移動し、外側アーチに沿って移動した足圧はステップ▲3▼で、第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行し、ステップ▲4▼で、ステップ▲3▼で母趾側に移動した足圧は、親指の方向に抜ける。
【0004】
従って、靴の設計において、「あおり運動」を設計の基本概念として、歩行している際の足裏にかかる力の分布及び力のベクトル方向を確認して、その力を支持し、安定させることができる構造の靴底とすれば、理想的な靴が提供されると考えられる。
【0005】
従来から、「あおり運動」を基本概念として設計した靴底が提案されている。
たとえば、特許文献1は、接地時に外旋方向の回転トルクを発生する外旋底部材を靴底の踵部に形成するとともに、接地時に内旋方向の回転トルクを発生する内旋底部材を靴底の小指球部に形成し、歩行形態をあおり歩行に矯正することができる靴底及びその靴底を有する靴を開示している。そして、外旋底部材として、円筒状の周壁の内部に複数個の断面直角三角形状の弾性を有する突起1を放射状に等間隔で配置したもので、各突起の傾斜面を底面視で反時計回りに配列したものと記載している。また、内旋底部材として、円筒状の周壁の内部に複数個の断面直角三角形状の弾性を有する突起を放射状に等間隔で配置したもので、各突起の傾斜面で底面視で時計回りに配列したものと記載している。
【0006】
たとえば、特許文献1は、靴底の踵部に外旋底部材を形成し、靴底の小指球部に内旋底部材を形成したものである。即ち、靴底の踵部と小指球部だけにあおり効果を付与させたものである。ところで、あおり効果に関して、特許文献1は、「『あおり歩行』とは、人間の正常な歩行形態であり、踵の外側から接地し、踵の内側に体重移動が行われ、その後小指の付け根側に体重移動が行われ、小指の付け根から親指の付け根へと体重移動が行われ、親指の付け根で蹴り出す歩行形態である。」と記載している([0027])。このように、あおり効果は、不連続な運動ではなく、踵部から親指の付け根に至る連続した運動である。従って、特許文献1に記載された靴のように、靴底の踵部と小指球部だけにあおり効果を付与した靴では、完全または十分なあおり効果を奏功することは不可能である。さらに、特許文献1に記載された靴は、靴底の構造以外に外旋底部材及び内旋底部材という2つの余計な部材を必要とし、全体の材料コストを引き上げる欠点がある。
【0007】
特許文献2は、あおり効果を助長する靴として、「前足部、中足部および後足部を有する靴底の中足部にシャンクピ−スを備えた靴底構造であって、前記シャンクピースが、足のリスフラン関節の部分に部分に交差する斜前端辺を有し、前記斜前端辺は、ソールセンターラインと20°〜70°の角度を成すように、足の前方に行くに従い外側に向かうように傾いており、前記斜前端辺を直線的に延長した延長線が小指の中足骨骨頭の小趾球から小指の趾骨の先端までの間を通るように、前記斜前端辺が配置されていおり、前記斜前端辺に略平行なラインの沿って靴底の屈曲を許容すると共に助長するようにした靴底構造。」を記載している。特許文献2に記載された靴は、ミッドソ−ルの下面にシャンクピ−スを固着することを必須要件としており、このシャンクピースは、踏まず部の変形を防止するが、一方、あおり運動を阻害する欠点がある。
【0008】
特許文献3は、ストリップ形状またはワイヤ状のシャンクピースをミッドソールの底面側に設けることで、前足部に対し後足部を捩れやすくして、歩行時に足が捩れながら屈曲する「あおり運動」を可能にするとした靴底構造を開示している。然しながら、特許文献3が記載している靴底の構造では、あおり運動を行う際に、緩衝底の変形方向を適切に制御することができず、あおり運動を促進することはできない。
【0009】
特許文献4及び5は接地面の適所に溝を形成することで靴底の屈曲性を高めて、歩行時のあおり運動に合わせて靴底が屈曲するような構造にして靴底を開示している。然しながら、特許文献4及び5に記載された靴底では、溝が靴の幅方向全体にわたって形成されているので、靴底が前方部、中間部、後方部に三分割され、歩行または走行時のあおり運動に合わせて靴底が適正に追随することでできず、あおり運動を促進することはできない。
【0010】
【特許文献1】特開2009−18124号公報
【特許文献2】特開2001−137004公報
【特許文献3】特開昭63−194602号公報
【特許文献4】特開2000−189205号公報
【特許文献5】特開2001−57901号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
発明が解決しようとする課題は、歩行時のあおり運動を促進する構造の靴底を提供することである。
【課題を解決するための手段】
【0012】
上記課題を下記の手段により解決される。
イ。第1中足骨の下方側縁端P1から第5中足骨の中央P2に至る180度の直線を歩行時のベクトル方向が切り替わる境界線CL1とし、
ロ。第1中足骨のほぼ中央外縁端P3から第2中足骨の下方及び第3中足骨の下方を経て、
立方骨の中央、踵骨の上方及び距骨の中央側縁端P4に抜ける曲線をL1とし、
ハ。前記直線CL1と前記曲線L1との交点をP5とし、前記P1とP5を結ぶ直線をL2とし、前記P5とP2を結ぶ直線をL3とし、
ニ。前記P3とP5を結ぶ曲線をL4とし、前記P5とP4を結ぶ曲線をL5とし、
ホ。第2末節骨の外側縁端P6及び第2中足骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L3と、前記L4、及び前記曲線L6が形成する領域を領域R1とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L4及び前記直線L2が形成する領域を領域R3とし、
4.前記直線L2及び曲線L5が形成する領域を領域R4とし、且つ
5.前記直線L3及び曲線L5が形成する領域を領域R5として、
I:前記領域R1に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R3に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
IV:前記領域R4に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R5に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【0013】
さらに、上記課題を下記の手段により解決される。
イ。内側楔状骨の下方側縁端P9から中間楔状骨のほぼ中央を斜めに横断し、第3中足骨の下端を経て第4中足骨のほぼ中央、及び第5中足骨のほぼ中央外縁端P10に至る靴底の斜め外方へ向かう直線を、歩行時のベクトル方向が切り替わる境界線CL2とし、
ロ。第1中足骨のほぼ中央外縁端P12から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P13に至る曲線をL9とし、
ハ。前記直線CL2と前記曲線L9との交点をP11とし、前記P9とP11を結ぶ直線をL7とし、前記P11とP10を結ぶ直線をL8とし、
ニ。前記P12とP11を結ぶ曲線をL10とし、前記P11とP13を結ぶ曲線をL12とし、
ホ。第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L8と、前記曲線L10、及び前記曲線L6が形成する領域を領域R6とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L10及び前記直線L7が形成する領域を領域R7とし、
4.前記直線L7及び曲線L12が形成する領域を領域R8とし、且つ
5.前記直線L8及び曲線L12が形成する領域を領域R9として、
I:前記領域R6に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R7に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
IV:前記領域R8に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R9に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【発明の効果】
【0014】
請求項1に記載した発明により、あおり運動に対応して、あおり運動を促進する靴底が提供され、歩行時に、靴底が路面を確実に噛んで、ぶれることなく安定した運動ができる靴底が提供される。
【0015】
請求項2に記載した発明により、あおり運動に対応して、あおり運動を促進する靴底が提供され、歩行時に、靴底が路面を確実に噛んで、ぶれることなく安定した運動ができ、且つ靴底意匠が連続した美観上も優れた靴底が提供される。
【発明を実施するための形態】
【実施例1】
【0016】
添付図面を参照して発明を実施するための最良の形態を説明する。図1は、ヒトが歩行する際の足の運動を大まかに▲1▼〜▲4▼の4つのステップに分解し、それぞれのステップにおける足の部位と、曲線で示した縦方向アーチの連動状態を示す概念図である。ステップ▲1▼で、膝を伸ばして踵から着地する。ステップ▲2▼で、踵にかかった重心は外側アーチに沿って移動し、踵と踏みつけ部が着地する。ステップ▲3▼で、外側アーチに沿って移動した重心は第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行する。ステップ▲4▼で、ステップ▲3▼で母趾側に移動した重心は、親指の方向に抜けていき、母趾と第2趾を使って地面を蹴る。この連続した体重の移動を「あおり運動」という。換言すれば、「あおり運動」は、足の回外運動と回内運動の二つの運動が組み合わさった運動で、足の縦アーチと横アーチを利用することにより、足が歩行中に荷重中心を後方→前方へと移動させながら同時に内側⇔外側にもヒラヒラと移動させる運動をいうこともできる。
【0017】
上述した歩行する際の足の運動状態を足に負荷される足圧の分布状態から検討する。図1−2は、ヒトが歩行する際の足に負荷される、いわゆる足圧の分布状態を足圧分布測定システム「Fスキャン」で測定した結果を、図1−1の▲1▼〜▲4▼の4つのステップに圧縮して図に画き起こしたものである。図1−2に示したように、ステップ▲1▼で、膝を伸ばして踵から着地すると、踵骨の中心に最も大きな足圧が負荷され、ほぼ等間隔で足圧が低減し、ステップ▲1▼で踵にかかった足圧はステップ▲2▼外側アーチに沿って踏みつけ部に移動し、外側アーチに沿って移動した足圧はステップ▲3▼で、第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行し、ステップ▲4▼で、ステップ▲3▼で母趾側に移動した足圧は、親指の方向に抜ける。
【0018】
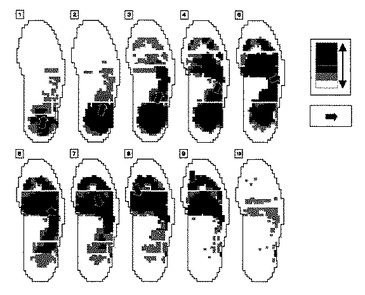
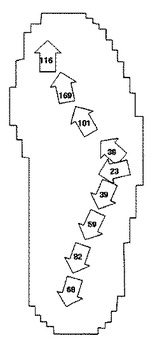
図2は、足圧分布測定システム「Fスキャン」で測定した歩行時の1〜10の各ステップにおける足圧分布と力のベクトル方向を測定した結果を示す概念図である。矢印(→→)が力の方向である。力の大きさを白(明度100%)〜黒(明度0%)の白〜灰色〜黒に至る6段階のグレースケールで表している。即ち、白→灰色→黒に至る6段階毎に力が大きくなっていることが視認される。さらに、歩行時のベクトル方向は、踵が着地した時点から爪先の蹴り出しへ向かって矢印方向へ力がかかっているが、逆に踵が床から離れた時点からは踵着地時のベクトルとは逆方向へ力が加わっていること(ステップ6〜10)が視認される。
【0019】
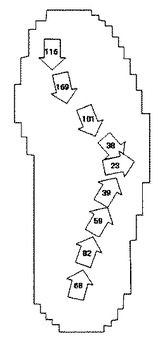
図3は、歩行時のベクトルと床反力を数値化した概念図である。図3−1は、歩行時の力の方向と量を示す概念図で、図3−2は、歩行時の床反力の方向と量を示す概念図である。図3においてNは、力の単位ニュートンである。
【0020】
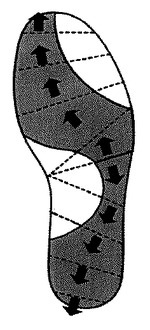
図4は、図1〜図3の理論及び実験による解析結果を理解し易いように図案化したあおり運動の概念図で、あおり運動は、うねった川の流れのように発生していることが、図4により視認される。従って、靴底の構造の設計に当たっては、あおり運動を阻害しないように、あおり運動の軌道(流れ)上の靴底の構造は、床反力に対してぶれにくい安定したものにすることが重要である。
【0021】
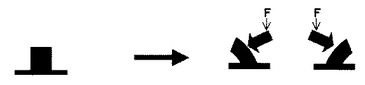
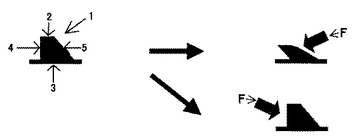
図5は、靴底を構成する突起1の断面形状と、負荷される力と変形状態を示す概念図である。図5−1は、靴底を構成する突起1の断面が矩形の場合の、負荷される力と変形状態を示す概念図、図5−2は、靴底を構成する突起1の断面が台形の場合の、負荷される力と変形状態を示す概念図である。図5−1に示すように、靴底を構成する突起1の断面が矩形の場合は、力(F)が、突起1の左右のどちらから負荷されても、簡単に曲がる。他方、図5−2に示すように、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する突起1構造の場合、斜面5の方向から力(F)が加わった場合は、力(F)が加わった方向へ簡単に曲がるが、垂直片4の方向から力(F)が加わった場合は、力(F)が加わった方向へは曲がりにくい。従って、靴底を、図5−2に示すような平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する突起1をあおり運動の軌道に沿って構成すれば、同じ硬度のゴムであっても、力に対する強度差を出すことができることが分かった。
【0022】
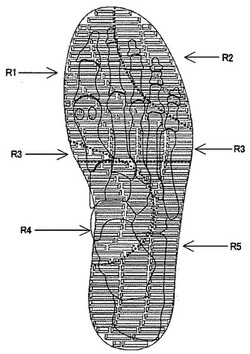
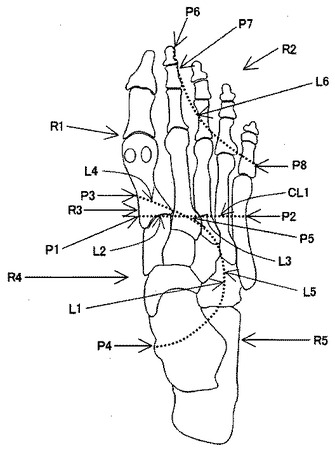
図6は、あおり運動を活かした靴底の設計パターンを足の骨格に対応させた概念図である。図6に示したように、第1中足骨の下方側縁端P1から第5中足骨の中央P2に至る180度の直線を歩行時のベクトル方向が切り替わる境界線CL1とし、第1中足骨のほぼ中央外縁端P3から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P4抜ける曲線をL1とし、前記直線CL1と前記曲線L1との交点をP5とし、前記P1とP5を結ぶ直線をL2とし、前記P5とP2を結ぶ直線をL3とし、前記P3とP5を結ぶ曲線をL4とし、前記P5とP4を結ぶ曲線をL5とし、第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、前記直線L3と、前記曲線L4、及び前記曲線L6が形成する領域を領域R1とし、前記曲線L6から靴底外方へ向かう領域を領域R2とし、前記曲線L4及び前記直線L2が形成する領域を領域R3とし、前記直線L2及び曲線L5が形成する領域を領域R4とし、且つ前記直線L3及び曲線L5が形成する領域を領域R5とする。
【0023】
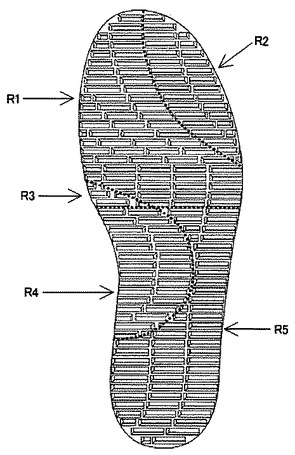
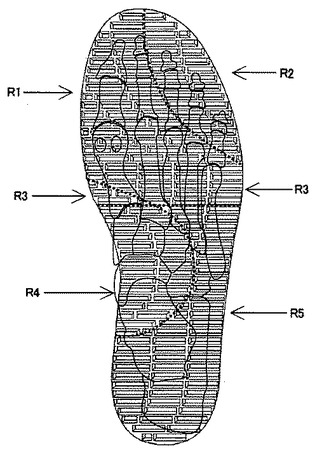
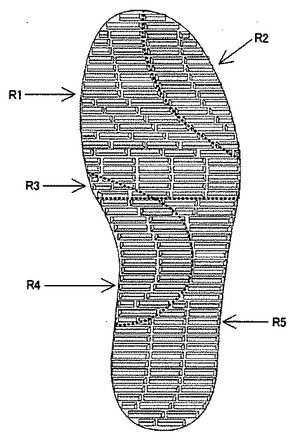
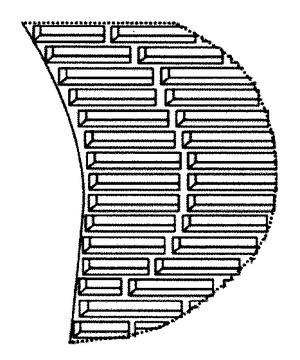
図7は、あおり運動を設計に活かした本発明の実施例1の靴底の底面図である。図7において領域R1は、図6において説明した、前記直線L3と、前記曲線L4、及び前記曲線L6が形成する領域で、領域R2は、前記曲線L6から靴底外方へ向かう領域で、領域R3は、前記曲線L4及び前記直線L2が形成する領域で、領域R4は、前記直線L2及び曲線L5が形成する領域で、R5は、前記直線L3及び曲線L5が形成する領域である。
【0024】
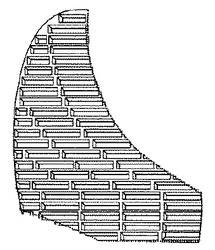
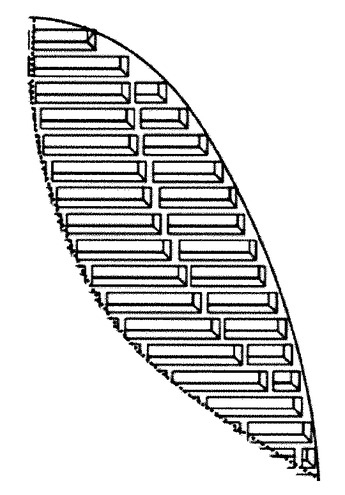
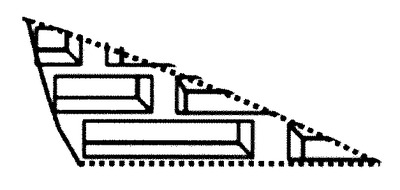
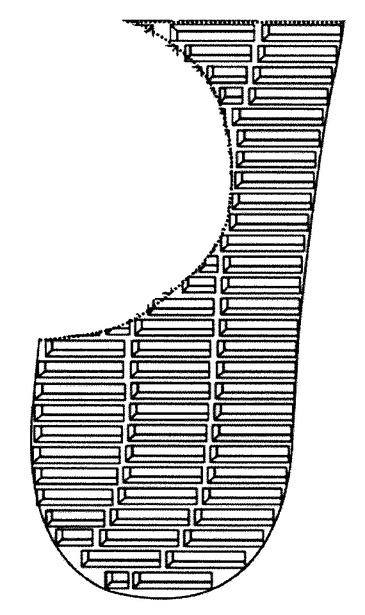
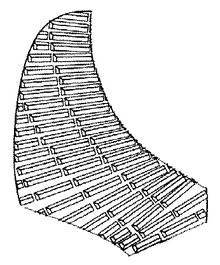
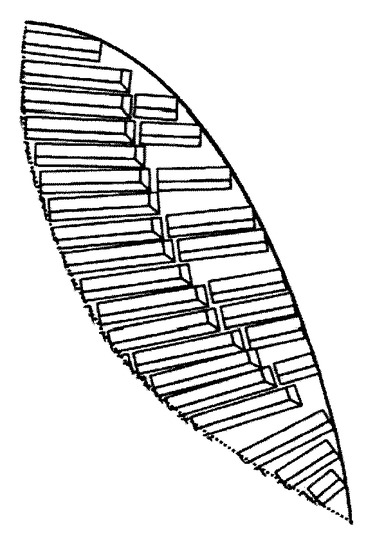
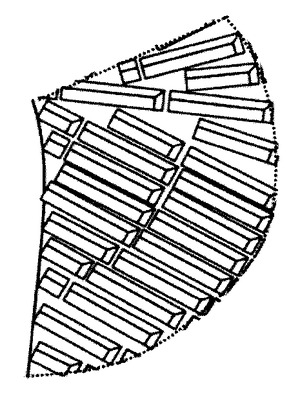
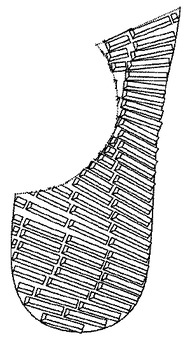
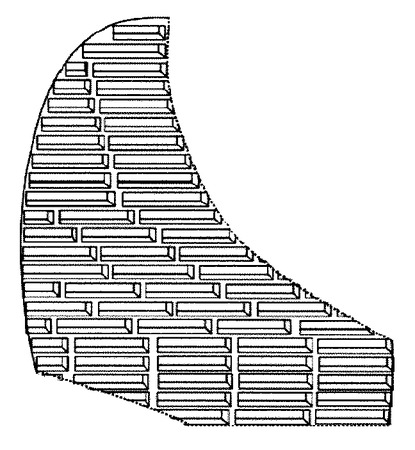
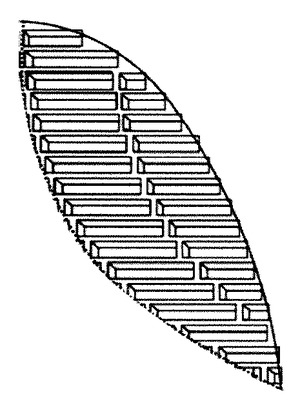
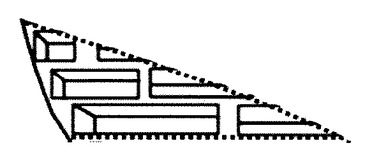
図7−1は、靴底の領域R1の拡大図である。図7−1から分かるように、領域R1に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図7−2は、靴底の領域R2の拡大図である。図7−2から分かるように、領域R2に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図7−3は、靴底の領域R3の拡大図である。図7−3から分かるように、領域R3に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図7−4は、靴底の領域R4の拡大図である。図7−4から分かるように、領域R4に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図7−5は、靴底の領域R5の拡大図である。図7−5から分かるように、領域R5に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面4とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。
【0025】
図8は、足の骨格図に図7の靴底の意匠パターンを一緒に描いた概念図である。図8より、靴底の領域R1〜R5の構造と、足の骨格と、あおり運動の軌道(流れ)の三者の対応関係が視認される。
【実施例2】
【0026】
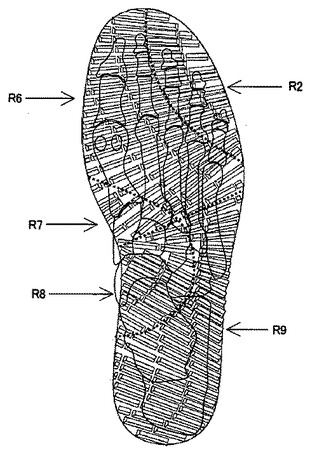
図9は、あおり運動を活かした実施例2に係わる靴底の設計パターンを足の骨格に対応させた概念図である。実施例1に係わる図6では、歩行時のベクトル方向が切りかわる境界線CL1が180度の直線である。このように、歩行時のベクトル方向が切りかわる境界線CL1が180度の直線の場合、靴底のデザインが完全に上下に分断され、連続性が途切れ、意匠効果が低減される恐れがある。そこで、図9では、内側楔状骨の下方側縁端P9から中間楔状骨のほぼ中央を斜めに横断し、第3中足骨の下端を経て第4中足骨のほぼ中央、及び第5中足骨のほぼ中央外縁端P10に至る靴底の斜め外方へ向かう直線を、歩行時のベクトル方向が切り替わる境界線CL2とした。また、第1中足骨のほぼ中央外縁端P12から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P13に至る曲線をL9とし、前記直線CL2と前記曲線L9との交点をP11とし、前記P9とP11を結ぶ直線をL7とし、前記P11とP10を結ぶ直線をL8とした。また、前記P12とP11を結ぶ曲線をL10とし、前記P11とP13を結ぶ曲線をL12とした。第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とする。前記直線L8と、前記曲線L10、及び前記曲線L6が形成する領域を領域R6とし、前記曲線L6から靴底外方へ向かう領域を領域R2とし、前記曲線L10及び前記直線L7が形成する領域を領域R7とし、前記直線L7及び曲線L12が形成する領域を領域R8とし、且つ前記直線L8及び曲線L12が形成する領域を領域R9とした。
【0027】
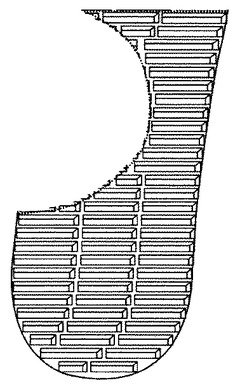
図10は、あおり運動を設計に活かした本発明の実施例2の靴底の底面図である。図10において、R2は、図9で説明したように、曲線L13から靴底外方へ向かう領域で、R6は曲線L10と、直線L8と、曲線L6とが形成する領域で、R6は直線L8、曲線L10、及び曲線L6が形成する領域で、R7は曲線L10と直線L7が形成する領域で、R8は直線L7と曲線L12が形成する領域で、R9は直線L8と曲線L9が形成する領域である。
【0028】
図10−1は、図10の領域R6の拡大図である。図10−1から分かるように、領域R6に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図10−2は、靴底の領域R2の拡大図である。図10−2から分かるように、領域R2に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図10−3は、靴底の領域R7の拡大図である。図10−3から分かるように、領域R7に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図10−4は、靴底の領域R8の拡大図である。図10−4から分かるように、領域R8に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図10−5は、靴底の領域R9の拡大図である。図10−5から分かるように、領域R9に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。
【0029】
図11は、足の骨格図に図10の靴底の意匠パターンを一緒に描いた概念図である。図11より、靴底の領域R2〜R9の構造と、足の骨格と、あおり運動の軌道(流れ)の三者の対応関係が視認される。
〔実施例1及び2の試用結果〕
【0030】
実施例1及び2で製造した靴底を適用したウオーキングシューズを、年齢が10代、20代、30代、40代、50代、60代、及び70代の男女それぞれ10名にモニターになってもらい、階段を含む道路を5kmウオーキングしてもらって、下記に例示するような評価を得た。足のサイズにあった靴でも長時間の歩行する間に、靴の内部で足が無駄な動きをするものであるが、実施例1及び2の靴は、初めて履いた靴にも係わらず、5kmのウオーキングの間に靴の内部で足が無駄な動きをせず、歩行による違和感、疲労感が無い。路面に対する噛み(投錨効果)が十分で安定した歩行感を得た。靴底の底面の着地状態からボールジョイントによる蹴り出しへの移行が自然でスムーズで抵抗がない。階段を昇降する時、特に降りるときに、前方に滑ることが全くなく、階段を降りる際に体験する恐怖感が無い。視覚的に重量感に満ちたデザインにも係わらず、歩行時に重量を感じず、歩行動作が自然で抵抗がない。
〔参考例〕
【0031】
図12は、あおり運動を設計に活かしていない参考例の靴底の底面図である。図12−1は図12の領域R1の拡大図、図12−2は図12の領域R2の拡大図、図12−3は図12の領域R3の拡大図、図12−4は図12の領域R4の拡大図、図12−5は図12の領域R5の拡大図である。尚、R1〜R5の定義は、実施例1でそれぞれ定義した通りである。
【0032】
図12−1は、靴底の領域R1の拡大図である。図12−1から分かるように、領域R1に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を、実施例1及び2とは逆に踵先方向へ向けて突設させて構成してある。図12−2は、靴底の領域R2の拡大図である。図12−2から分かるように、領域R2に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に爪先方向へ向けて突設させて構成してある。図12−3は、靴底の領域R3の拡大図である。図12−3から分かるように、領域R3に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に爪先方向へ向けて突設させて構成してある。図12−4は、靴底の領域R4の拡大図である。図12−4から分かるように、領域R4に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に踵方向へ向けて突設させて構成してある。図12−5は、靴底の領域R5の拡大図である。図12−5から分かるように、領域R5に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に爪先方向へ向けて突設させて構成してある。
〔参考例の試用結果〕
【0033】
参考例で製造した靴底を適用したウオーキングシューズを、年齢が10代、20代、30代、40代、50代、60代、及び70代の男女それぞれ10名にモニターになってもらい、階段を含む道路を5kmウオーキングしてもらって、下記に例示するような評価を得た。足のサイズに合っているにも係わらず、長時間の歩行する間に、靴の内部で足が無駄な動きをし、歩行による違和感、疲労感を受けた。路面に対する噛み(投錨効果)が不十分で安定した歩行感が得られない。靴底の底面の着地状態からボールジョイントによる蹴り出しへの移行が自然でなく、抵抗がある。階段を昇降する時、特に降りるときに、前方に滑るような感触があり、階段を降りる際に恐怖感を体験した。
【産業上の利用分野】
【0034】
以上、詳述したように、本発明の靴底は、歩行時のあおり運動を促進する構造なので、それを装着した靴、特に、ウオーキングシューズは、靴の内部で足が無駄な動きをせず、歩行による違和感、疲労感が無く、路面に対する噛み(投錨効果)が十分で安定した歩行感を与え、靴底の底面の着地状態からボールジョイントによる蹴り出しへの移行が自然でスムーズで抵抗がなく、階段を昇降する時、特に降りるときに、前方に滑ることが全くなく、階段を降りる際に体験する恐怖感が無く、視覚的に重量感に満ちたデザインにも係わらず、歩行時に重量を感じず、歩行動作が自然で抵抗がない等の優れた効果を奏功する。従って、靴業界、特にウオーキングシューズを製造する産業界に多大の寄与をする。
【図面の簡単な説明】
【0035】
【図1】ヒトの歩行時の足の運動を分解した概念図。
【図1−1】ヒトの歩行時の足の運動を4つのステップに分解した概念図
【図1−2】ヒトの歩行時の足圧の分布状態を足圧分布測定システム「Fスキャン」で測定した結果を、図1−1の▲1▼〜▲4▼の4つのステップに圧縮して画いた概念図
【図2】足圧分布測定システム「Fスキャン」で測定した歩行時の1〜10の各ステップにおける足圧の分布と力のベクトル方向を示す概念図。
【図3】歩行時のベクトルと床反力を数値化した概念図。
【図3−1】歩行時の力の方向と量(N:単位、ニュートン)を示す概念図。
【図3−2】歩行時の床反力の方向と量(N:単位、ニュートン)を示す概念図。
【図4】歩行時のベクトルと床反力の方向を示す概念図。
【図5】靴底を構成する突起1の断面形状と、負荷される力と変形状態を示す概念図。
【図5−1】靴底を構成する突起1の断面が矩形の場合の、負荷される力と変形状態を示す概念図。
【図5−2】靴底を構成する突起1の断面が台形の場合の、負荷される力と変形状態を示す概念図。
【図6】あおり運動を活かした靴底の設計パターンを足の骨格に対応させた概念図。
【図7】あおり運動を設計に活かした本発明の実施例1の靴底の底面図。
【図7−1】図7の領域R1の拡大図。
【図7−2】図7の領域R2の拡大図。
【図7−3】図7の領域R3の拡大図。
【図7−4】図7の領域R4の拡大図。
【図7−5】図7の領域R5の拡大図。
【図8】足の骨格図に図7の靴底の意匠パターンを一緒に描いた概念図。
【図9】あおり運動を活かした靴底の設計パターンを足の骨格に対応させた概念図。
【図10】あおり運動を設計に活かした本発明の実施例2の靴底の底面図。
【図10−1】図10の領域R6の拡大図。
【図10−2】図10の領域R2の拡大図。
【図10−3】図10の領域R7の拡大図。
【図10−4】図10の領域R8の拡大図。
【図10−5】図10の領域R9の拡大図。
【図11】足の骨格図に図10の靴底の意匠パターンを一緒に描いた概念図。
【図12】あおり運動を設計に活かしていない参考例の靴底の底面図。
【図12−1】図12の領域R1の拡大図。
【図12−2】図12の領域R2の拡大図。
【図12−3】図12の領域R3の拡大図。
【図12−4】図12の領域R4の拡大図。
【図12−5】図12の領域R5の拡大図。
【符号の説明】
【0036】
CL1:歩行時のベクトル方向が切り替わる境界線
CL2:歩行時のベクトル方向が切り替わる境界線
P1:第1中足骨の下方側縁端
P2:第5中足骨の中央
P3:第1中足骨のほぼ中央外縁端
P4:距骨の中央側縁端
P5:直線CL1と曲線L1との交点
P6:第2末節骨の外側縁端
P7:第2中節骨の外側縁端
P8:第5基節骨のほぼ中央
P9:内側楔状骨の下方側縁端
P10:第5中足骨のほぼ中央外縁端
P11:直線CL2と曲線L9との交点
P12:第1中足骨のほぼ中央外縁端
P13:距骨の中央側縁端
L1:距骨の中央側縁端P4を抜ける曲線
L2:P1とP5を結ぶ直線
L3:P5とP2を結ぶ直線
L4:P3とP5を結ぶ直線
L5:P5とP4を結ぶ曲線
L6:P6とP8を結ぶ曲線
L7:P9とP11を結ぶ直線
L8:P11とP10を結ぶ直線
L9:P11とP13を結ぶ曲線
L10:P12とP11を結ぶ曲線
R1:直線L3、L4、及び曲線L6が形成する領域
R2:曲線L6から靴底外方へ向かう領域
R3:曲線L4と直線L2が形成する領域
R4:直線L2と曲線L5が形成する領域
R5:直線L3と曲線L5が形成する領域
R6:直線L8、曲線L10、及び曲線L6が形成する領域
R7:曲線L10と直線L7が形成する領域
R8:直線L7と曲線L12が形成する領域
R9:直線L8と曲線L12が形成する領域
1:靴底に突設される突起
2:突起1の上底
3:突起1の下底
4:突起1の垂直片
5:突起1の斜面
【技術分野】
【0001】
本発明は靴底に関する。より詳細に述べれば、本発明は、あおり運動を促進させるような構造の靴底に関する。
【背景技術】
【0002】
図1はヒトが歩行或いは走行する際の足の運動を大まかに▲1▼〜▲4▼の4つのステップに分解した図である。図1−1は、にヒトが歩行或いは走行するときの運動を▲1▼〜▲4▼の4つのステップに分解し、それぞれのステップにおける足の部位と、曲線で示した縦方向アーチの連動状態を示す概念図である。ステップ▲1▼で、膝を伸ばして踵から着地する。ステップ▲2▼で、踵にかかった重心は外側アーチに沿って移動し、踵と踏みつけ部が着地する。ステップ▲3▼で、外側アーチに沿って移動した重心は第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行する。ステップ▲4▼で、ステップ▲3▼で母趾側に移動した重心は、親指の方向に抜けていき、母趾と第2趾を使って地面を蹴る。この連続した体重の移動を「あおり運動」という。換言すれば、「あおり運動」は、足の回外運動と回内運動の二つの運動が組み合わさった運動で、足の縦アーチと横アーチを利用することにより、足が歩行中に荷重中心を後方→前方へと移動させながら同時に内側⇔外側にもヒラヒラと移動させる運動をいうこともできる。
【0003】
上述した歩行或いは走行する際の足の運動状態を足に負荷される足圧の分布状態から検討する。図1−2は、ヒトが歩行或いは走行する際の足に負荷される、いわゆる足圧の分布状態を足圧分布測定システム「Fスキャン」で測定した結果を、図1−1の▲1▼〜▲4▼の4つのステップに圧縮して図に画き起こしたものである。図1−2に示したように、ステップ▲1▼で、膝を伸ばして踵から着地すると、踵骨の中心に最も大きな足圧が負荷され、ほぼ等間隔で足圧が低減し、ステップ▲1▼で踵にかかった足圧はステップ▲2▼外側アーチに沿って踏みつけ部に移動し、外側アーチに沿って移動した足圧はステップ▲3▼で、第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行し、ステップ▲4▼で、ステップ▲3▼で母趾側に移動した足圧は、親指の方向に抜ける。
【0004】
従って、靴の設計において、「あおり運動」を設計の基本概念として、歩行している際の足裏にかかる力の分布及び力のベクトル方向を確認して、その力を支持し、安定させることができる構造の靴底とすれば、理想的な靴が提供されると考えられる。
【0005】
従来から、「あおり運動」を基本概念として設計した靴底が提案されている。
たとえば、特許文献1は、接地時に外旋方向の回転トルクを発生する外旋底部材を靴底の踵部に形成するとともに、接地時に内旋方向の回転トルクを発生する内旋底部材を靴底の小指球部に形成し、歩行形態をあおり歩行に矯正することができる靴底及びその靴底を有する靴を開示している。そして、外旋底部材として、円筒状の周壁の内部に複数個の断面直角三角形状の弾性を有する突起1を放射状に等間隔で配置したもので、各突起の傾斜面を底面視で反時計回りに配列したものと記載している。また、内旋底部材として、円筒状の周壁の内部に複数個の断面直角三角形状の弾性を有する突起を放射状に等間隔で配置したもので、各突起の傾斜面で底面視で時計回りに配列したものと記載している。
【0006】
たとえば、特許文献1は、靴底の踵部に外旋底部材を形成し、靴底の小指球部に内旋底部材を形成したものである。即ち、靴底の踵部と小指球部だけにあおり効果を付与させたものである。ところで、あおり効果に関して、特許文献1は、「『あおり歩行』とは、人間の正常な歩行形態であり、踵の外側から接地し、踵の内側に体重移動が行われ、その後小指の付け根側に体重移動が行われ、小指の付け根から親指の付け根へと体重移動が行われ、親指の付け根で蹴り出す歩行形態である。」と記載している([0027])。このように、あおり効果は、不連続な運動ではなく、踵部から親指の付け根に至る連続した運動である。従って、特許文献1に記載された靴のように、靴底の踵部と小指球部だけにあおり効果を付与した靴では、完全または十分なあおり効果を奏功することは不可能である。さらに、特許文献1に記載された靴は、靴底の構造以外に外旋底部材及び内旋底部材という2つの余計な部材を必要とし、全体の材料コストを引き上げる欠点がある。
【0007】
特許文献2は、あおり効果を助長する靴として、「前足部、中足部および後足部を有する靴底の中足部にシャンクピ−スを備えた靴底構造であって、前記シャンクピースが、足のリスフラン関節の部分に部分に交差する斜前端辺を有し、前記斜前端辺は、ソールセンターラインと20°〜70°の角度を成すように、足の前方に行くに従い外側に向かうように傾いており、前記斜前端辺を直線的に延長した延長線が小指の中足骨骨頭の小趾球から小指の趾骨の先端までの間を通るように、前記斜前端辺が配置されていおり、前記斜前端辺に略平行なラインの沿って靴底の屈曲を許容すると共に助長するようにした靴底構造。」を記載している。特許文献2に記載された靴は、ミッドソ−ルの下面にシャンクピ−スを固着することを必須要件としており、このシャンクピースは、踏まず部の変形を防止するが、一方、あおり運動を阻害する欠点がある。
【0008】
特許文献3は、ストリップ形状またはワイヤ状のシャンクピースをミッドソールの底面側に設けることで、前足部に対し後足部を捩れやすくして、歩行時に足が捩れながら屈曲する「あおり運動」を可能にするとした靴底構造を開示している。然しながら、特許文献3が記載している靴底の構造では、あおり運動を行う際に、緩衝底の変形方向を適切に制御することができず、あおり運動を促進することはできない。
【0009】
特許文献4及び5は接地面の適所に溝を形成することで靴底の屈曲性を高めて、歩行時のあおり運動に合わせて靴底が屈曲するような構造にして靴底を開示している。然しながら、特許文献4及び5に記載された靴底では、溝が靴の幅方向全体にわたって形成されているので、靴底が前方部、中間部、後方部に三分割され、歩行または走行時のあおり運動に合わせて靴底が適正に追随することでできず、あおり運動を促進することはできない。
【0010】
【特許文献1】特開2009−18124号公報
【特許文献2】特開2001−137004公報
【特許文献3】特開昭63−194602号公報
【特許文献4】特開2000−189205号公報
【特許文献5】特開2001−57901号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
発明が解決しようとする課題は、歩行時のあおり運動を促進する構造の靴底を提供することである。
【課題を解決するための手段】
【0012】
上記課題を下記の手段により解決される。
イ。第1中足骨の下方側縁端P1から第5中足骨の中央P2に至る180度の直線を歩行時のベクトル方向が切り替わる境界線CL1とし、
ロ。第1中足骨のほぼ中央外縁端P3から第2中足骨の下方及び第3中足骨の下方を経て、
立方骨の中央、踵骨の上方及び距骨の中央側縁端P4に抜ける曲線をL1とし、
ハ。前記直線CL1と前記曲線L1との交点をP5とし、前記P1とP5を結ぶ直線をL2とし、前記P5とP2を結ぶ直線をL3とし、
ニ。前記P3とP5を結ぶ曲線をL4とし、前記P5とP4を結ぶ曲線をL5とし、
ホ。第2末節骨の外側縁端P6及び第2中足骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L3と、前記L4、及び前記曲線L6が形成する領域を領域R1とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L4及び前記直線L2が形成する領域を領域R3とし、
4.前記直線L2及び曲線L5が形成する領域を領域R4とし、且つ
5.前記直線L3及び曲線L5が形成する領域を領域R5として、
I:前記領域R1に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R3に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
IV:前記領域R4に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R5に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【0013】
さらに、上記課題を下記の手段により解決される。
イ。内側楔状骨の下方側縁端P9から中間楔状骨のほぼ中央を斜めに横断し、第3中足骨の下端を経て第4中足骨のほぼ中央、及び第5中足骨のほぼ中央外縁端P10に至る靴底の斜め外方へ向かう直線を、歩行時のベクトル方向が切り替わる境界線CL2とし、
ロ。第1中足骨のほぼ中央外縁端P12から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P13に至る曲線をL9とし、
ハ。前記直線CL2と前記曲線L9との交点をP11とし、前記P9とP11を結ぶ直線をL7とし、前記P11とP10を結ぶ直線をL8とし、
ニ。前記P12とP11を結ぶ曲線をL10とし、前記P11とP13を結ぶ曲線をL12とし、
ホ。第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L8と、前記曲線L10、及び前記曲線L6が形成する領域を領域R6とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L10及び前記直線L7が形成する領域を領域R7とし、
4.前記直線L7及び曲線L12が形成する領域を領域R8とし、且つ
5.前記直線L8及び曲線L12が形成する領域を領域R9として、
I:前記領域R6に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R7に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
IV:前記領域R8に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R9に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【発明の効果】
【0014】
請求項1に記載した発明により、あおり運動に対応して、あおり運動を促進する靴底が提供され、歩行時に、靴底が路面を確実に噛んで、ぶれることなく安定した運動ができる靴底が提供される。
【0015】
請求項2に記載した発明により、あおり運動に対応して、あおり運動を促進する靴底が提供され、歩行時に、靴底が路面を確実に噛んで、ぶれることなく安定した運動ができ、且つ靴底意匠が連続した美観上も優れた靴底が提供される。
【発明を実施するための形態】
【実施例1】
【0016】
添付図面を参照して発明を実施するための最良の形態を説明する。図1は、ヒトが歩行する際の足の運動を大まかに▲1▼〜▲4▼の4つのステップに分解し、それぞれのステップにおける足の部位と、曲線で示した縦方向アーチの連動状態を示す概念図である。ステップ▲1▼で、膝を伸ばして踵から着地する。ステップ▲2▼で、踵にかかった重心は外側アーチに沿って移動し、踵と踏みつけ部が着地する。ステップ▲3▼で、外側アーチに沿って移動した重心は第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行する。ステップ▲4▼で、ステップ▲3▼で母趾側に移動した重心は、親指の方向に抜けていき、母趾と第2趾を使って地面を蹴る。この連続した体重の移動を「あおり運動」という。換言すれば、「あおり運動」は、足の回外運動と回内運動の二つの運動が組み合わさった運動で、足の縦アーチと横アーチを利用することにより、足が歩行中に荷重中心を後方→前方へと移動させながら同時に内側⇔外側にもヒラヒラと移動させる運動をいうこともできる。
【0017】
上述した歩行する際の足の運動状態を足に負荷される足圧の分布状態から検討する。図1−2は、ヒトが歩行する際の足に負荷される、いわゆる足圧の分布状態を足圧分布測定システム「Fスキャン」で測定した結果を、図1−1の▲1▼〜▲4▼の4つのステップに圧縮して図に画き起こしたものである。図1−2に示したように、ステップ▲1▼で、膝を伸ばして踵から着地すると、踵骨の中心に最も大きな足圧が負荷され、ほぼ等間隔で足圧が低減し、ステップ▲1▼で踵にかかった足圧はステップ▲2▼外側アーチに沿って踏みつけ部に移動し、外側アーチに沿って移動した足圧はステップ▲3▼で、第5中足骨の骨頭部から母趾側に移動し、爪先における蹴上げ動作の初期運動に移行し、ステップ▲4▼で、ステップ▲3▼で母趾側に移動した足圧は、親指の方向に抜ける。
【0018】
図2は、足圧分布測定システム「Fスキャン」で測定した歩行時の1〜10の各ステップにおける足圧分布と力のベクトル方向を測定した結果を示す概念図である。矢印(→→)が力の方向である。力の大きさを白(明度100%)〜黒(明度0%)の白〜灰色〜黒に至る6段階のグレースケールで表している。即ち、白→灰色→黒に至る6段階毎に力が大きくなっていることが視認される。さらに、歩行時のベクトル方向は、踵が着地した時点から爪先の蹴り出しへ向かって矢印方向へ力がかかっているが、逆に踵が床から離れた時点からは踵着地時のベクトルとは逆方向へ力が加わっていること(ステップ6〜10)が視認される。
【0019】
図3は、歩行時のベクトルと床反力を数値化した概念図である。図3−1は、歩行時の力の方向と量を示す概念図で、図3−2は、歩行時の床反力の方向と量を示す概念図である。図3においてNは、力の単位ニュートンである。
【0020】
図4は、図1〜図3の理論及び実験による解析結果を理解し易いように図案化したあおり運動の概念図で、あおり運動は、うねった川の流れのように発生していることが、図4により視認される。従って、靴底の構造の設計に当たっては、あおり運動を阻害しないように、あおり運動の軌道(流れ)上の靴底の構造は、床反力に対してぶれにくい安定したものにすることが重要である。
【0021】
図5は、靴底を構成する突起1の断面形状と、負荷される力と変形状態を示す概念図である。図5−1は、靴底を構成する突起1の断面が矩形の場合の、負荷される力と変形状態を示す概念図、図5−2は、靴底を構成する突起1の断面が台形の場合の、負荷される力と変形状態を示す概念図である。図5−1に示すように、靴底を構成する突起1の断面が矩形の場合は、力(F)が、突起1の左右のどちらから負荷されても、簡単に曲がる。他方、図5−2に示すように、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する突起1構造の場合、斜面5の方向から力(F)が加わった場合は、力(F)が加わった方向へ簡単に曲がるが、垂直片4の方向から力(F)が加わった場合は、力(F)が加わった方向へは曲がりにくい。従って、靴底を、図5−2に示すような平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する突起1をあおり運動の軌道に沿って構成すれば、同じ硬度のゴムであっても、力に対する強度差を出すことができることが分かった。
【0022】
図6は、あおり運動を活かした靴底の設計パターンを足の骨格に対応させた概念図である。図6に示したように、第1中足骨の下方側縁端P1から第5中足骨の中央P2に至る180度の直線を歩行時のベクトル方向が切り替わる境界線CL1とし、第1中足骨のほぼ中央外縁端P3から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P4抜ける曲線をL1とし、前記直線CL1と前記曲線L1との交点をP5とし、前記P1とP5を結ぶ直線をL2とし、前記P5とP2を結ぶ直線をL3とし、前記P3とP5を結ぶ曲線をL4とし、前記P5とP4を結ぶ曲線をL5とし、第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、前記直線L3と、前記曲線L4、及び前記曲線L6が形成する領域を領域R1とし、前記曲線L6から靴底外方へ向かう領域を領域R2とし、前記曲線L4及び前記直線L2が形成する領域を領域R3とし、前記直線L2及び曲線L5が形成する領域を領域R4とし、且つ前記直線L3及び曲線L5が形成する領域を領域R5とする。
【0023】
図7は、あおり運動を設計に活かした本発明の実施例1の靴底の底面図である。図7において領域R1は、図6において説明した、前記直線L3と、前記曲線L4、及び前記曲線L6が形成する領域で、領域R2は、前記曲線L6から靴底外方へ向かう領域で、領域R3は、前記曲線L4及び前記直線L2が形成する領域で、領域R4は、前記直線L2及び曲線L5が形成する領域で、R5は、前記直線L3及び曲線L5が形成する領域である。
【0024】
図7−1は、靴底の領域R1の拡大図である。図7−1から分かるように、領域R1に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図7−2は、靴底の領域R2の拡大図である。図7−2から分かるように、領域R2に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図7−3は、靴底の領域R3の拡大図である。図7−3から分かるように、領域R3に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図7−4は、靴底の領域R4の拡大図である。図7−4から分かるように、領域R4に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図7−5は、靴底の領域R5の拡大図である。図7−5から分かるように、領域R5に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面4とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。
【0025】
図8は、足の骨格図に図7の靴底の意匠パターンを一緒に描いた概念図である。図8より、靴底の領域R1〜R5の構造と、足の骨格と、あおり運動の軌道(流れ)の三者の対応関係が視認される。
【実施例2】
【0026】
図9は、あおり運動を活かした実施例2に係わる靴底の設計パターンを足の骨格に対応させた概念図である。実施例1に係わる図6では、歩行時のベクトル方向が切りかわる境界線CL1が180度の直線である。このように、歩行時のベクトル方向が切りかわる境界線CL1が180度の直線の場合、靴底のデザインが完全に上下に分断され、連続性が途切れ、意匠効果が低減される恐れがある。そこで、図9では、内側楔状骨の下方側縁端P9から中間楔状骨のほぼ中央を斜めに横断し、第3中足骨の下端を経て第4中足骨のほぼ中央、及び第5中足骨のほぼ中央外縁端P10に至る靴底の斜め外方へ向かう直線を、歩行時のベクトル方向が切り替わる境界線CL2とした。また、第1中足骨のほぼ中央外縁端P12から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P13に至る曲線をL9とし、前記直線CL2と前記曲線L9との交点をP11とし、前記P9とP11を結ぶ直線をL7とし、前記P11とP10を結ぶ直線をL8とした。また、前記P12とP11を結ぶ曲線をL10とし、前記P11とP13を結ぶ曲線をL12とした。第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とする。前記直線L8と、前記曲線L10、及び前記曲線L6が形成する領域を領域R6とし、前記曲線L6から靴底外方へ向かう領域を領域R2とし、前記曲線L10及び前記直線L7が形成する領域を領域R7とし、前記直線L7及び曲線L12が形成する領域を領域R8とし、且つ前記直線L8及び曲線L12が形成する領域を領域R9とした。
【0027】
図10は、あおり運動を設計に活かした本発明の実施例2の靴底の底面図である。図10において、R2は、図9で説明したように、曲線L13から靴底外方へ向かう領域で、R6は曲線L10と、直線L8と、曲線L6とが形成する領域で、R6は直線L8、曲線L10、及び曲線L6が形成する領域で、R7は曲線L10と直線L7が形成する領域で、R8は直線L7と曲線L12が形成する領域で、R9は直線L8と曲線L9が形成する領域である。
【0028】
図10−1は、図10の領域R6の拡大図である。図10−1から分かるように、領域R6に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図10−2は、靴底の領域R2の拡大図である。図10−2から分かるように、領域R2に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図10−3は、靴底の領域R7の拡大図である。図10−3から分かるように、領域R7に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。図10−4は、靴底の領域R8の拡大図である。図10−4から分かるように、領域R8に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させて構成してある。図10−5は、靴底の領域R9の拡大図である。図10−5から分かるように、領域R9に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させて構成してある。
【0029】
図11は、足の骨格図に図10の靴底の意匠パターンを一緒に描いた概念図である。図11より、靴底の領域R2〜R9の構造と、足の骨格と、あおり運動の軌道(流れ)の三者の対応関係が視認される。
〔実施例1及び2の試用結果〕
【0030】
実施例1及び2で製造した靴底を適用したウオーキングシューズを、年齢が10代、20代、30代、40代、50代、60代、及び70代の男女それぞれ10名にモニターになってもらい、階段を含む道路を5kmウオーキングしてもらって、下記に例示するような評価を得た。足のサイズにあった靴でも長時間の歩行する間に、靴の内部で足が無駄な動きをするものであるが、実施例1及び2の靴は、初めて履いた靴にも係わらず、5kmのウオーキングの間に靴の内部で足が無駄な動きをせず、歩行による違和感、疲労感が無い。路面に対する噛み(投錨効果)が十分で安定した歩行感を得た。靴底の底面の着地状態からボールジョイントによる蹴り出しへの移行が自然でスムーズで抵抗がない。階段を昇降する時、特に降りるときに、前方に滑ることが全くなく、階段を降りる際に体験する恐怖感が無い。視覚的に重量感に満ちたデザインにも係わらず、歩行時に重量を感じず、歩行動作が自然で抵抗がない。
〔参考例〕
【0031】
図12は、あおり運動を設計に活かしていない参考例の靴底の底面図である。図12−1は図12の領域R1の拡大図、図12−2は図12の領域R2の拡大図、図12−3は図12の領域R3の拡大図、図12−4は図12の領域R4の拡大図、図12−5は図12の領域R5の拡大図である。尚、R1〜R5の定義は、実施例1でそれぞれ定義した通りである。
【0032】
図12−1は、靴底の領域R1の拡大図である。図12−1から分かるように、領域R1に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を、実施例1及び2とは逆に踵先方向へ向けて突設させて構成してある。図12−2は、靴底の領域R2の拡大図である。図12−2から分かるように、領域R2に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に爪先方向へ向けて突設させて構成してある。図12−3は、靴底の領域R3の拡大図である。図12−3から分かるように、領域R3に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に爪先方向へ向けて突設させて構成してある。図12−4は、靴底の領域R4の拡大図である。図12−4から分かるように、領域R4に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に踵方向へ向けて突設させて構成してある。図12−5は、靴底の領域R5の拡大図である。図12−5から分かるように、領域R5に対応する靴底は、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を実施例1及び2とは逆に爪先方向へ向けて突設させて構成してある。
〔参考例の試用結果〕
【0033】
参考例で製造した靴底を適用したウオーキングシューズを、年齢が10代、20代、30代、40代、50代、60代、及び70代の男女それぞれ10名にモニターになってもらい、階段を含む道路を5kmウオーキングしてもらって、下記に例示するような評価を得た。足のサイズに合っているにも係わらず、長時間の歩行する間に、靴の内部で足が無駄な動きをし、歩行による違和感、疲労感を受けた。路面に対する噛み(投錨効果)が不十分で安定した歩行感が得られない。靴底の底面の着地状態からボールジョイントによる蹴り出しへの移行が自然でなく、抵抗がある。階段を昇降する時、特に降りるときに、前方に滑るような感触があり、階段を降りる際に恐怖感を体験した。
【産業上の利用分野】
【0034】
以上、詳述したように、本発明の靴底は、歩行時のあおり運動を促進する構造なので、それを装着した靴、特に、ウオーキングシューズは、靴の内部で足が無駄な動きをせず、歩行による違和感、疲労感が無く、路面に対する噛み(投錨効果)が十分で安定した歩行感を与え、靴底の底面の着地状態からボールジョイントによる蹴り出しへの移行が自然でスムーズで抵抗がなく、階段を昇降する時、特に降りるときに、前方に滑ることが全くなく、階段を降りる際に体験する恐怖感が無く、視覚的に重量感に満ちたデザインにも係わらず、歩行時に重量を感じず、歩行動作が自然で抵抗がない等の優れた効果を奏功する。従って、靴業界、特にウオーキングシューズを製造する産業界に多大の寄与をする。
【図面の簡単な説明】
【0035】
【図1】ヒトの歩行時の足の運動を分解した概念図。
【図1−1】ヒトの歩行時の足の運動を4つのステップに分解した概念図
【図1−2】ヒトの歩行時の足圧の分布状態を足圧分布測定システム「Fスキャン」で測定した結果を、図1−1の▲1▼〜▲4▼の4つのステップに圧縮して画いた概念図
【図2】足圧分布測定システム「Fスキャン」で測定した歩行時の1〜10の各ステップにおける足圧の分布と力のベクトル方向を示す概念図。
【図3】歩行時のベクトルと床反力を数値化した概念図。
【図3−1】歩行時の力の方向と量(N:単位、ニュートン)を示す概念図。
【図3−2】歩行時の床反力の方向と量(N:単位、ニュートン)を示す概念図。
【図4】歩行時のベクトルと床反力の方向を示す概念図。
【図5】靴底を構成する突起1の断面形状と、負荷される力と変形状態を示す概念図。
【図5−1】靴底を構成する突起1の断面が矩形の場合の、負荷される力と変形状態を示す概念図。
【図5−2】靴底を構成する突起1の断面が台形の場合の、負荷される力と変形状態を示す概念図。
【図6】あおり運動を活かした靴底の設計パターンを足の骨格に対応させた概念図。
【図7】あおり運動を設計に活かした本発明の実施例1の靴底の底面図。
【図7−1】図7の領域R1の拡大図。
【図7−2】図7の領域R2の拡大図。
【図7−3】図7の領域R3の拡大図。
【図7−4】図7の領域R4の拡大図。
【図7−5】図7の領域R5の拡大図。
【図8】足の骨格図に図7の靴底の意匠パターンを一緒に描いた概念図。
【図9】あおり運動を活かした靴底の設計パターンを足の骨格に対応させた概念図。
【図10】あおり運動を設計に活かした本発明の実施例2の靴底の底面図。
【図10−1】図10の領域R6の拡大図。
【図10−2】図10の領域R2の拡大図。
【図10−3】図10の領域R7の拡大図。
【図10−4】図10の領域R8の拡大図。
【図10−5】図10の領域R9の拡大図。
【図11】足の骨格図に図10の靴底の意匠パターンを一緒に描いた概念図。
【図12】あおり運動を設計に活かしていない参考例の靴底の底面図。
【図12−1】図12の領域R1の拡大図。
【図12−2】図12の領域R2の拡大図。
【図12−3】図12の領域R3の拡大図。
【図12−4】図12の領域R4の拡大図。
【図12−5】図12の領域R5の拡大図。
【符号の説明】
【0036】
CL1:歩行時のベクトル方向が切り替わる境界線
CL2:歩行時のベクトル方向が切り替わる境界線
P1:第1中足骨の下方側縁端
P2:第5中足骨の中央
P3:第1中足骨のほぼ中央外縁端
P4:距骨の中央側縁端
P5:直線CL1と曲線L1との交点
P6:第2末節骨の外側縁端
P7:第2中節骨の外側縁端
P8:第5基節骨のほぼ中央
P9:内側楔状骨の下方側縁端
P10:第5中足骨のほぼ中央外縁端
P11:直線CL2と曲線L9との交点
P12:第1中足骨のほぼ中央外縁端
P13:距骨の中央側縁端
L1:距骨の中央側縁端P4を抜ける曲線
L2:P1とP5を結ぶ直線
L3:P5とP2を結ぶ直線
L4:P3とP5を結ぶ直線
L5:P5とP4を結ぶ曲線
L6:P6とP8を結ぶ曲線
L7:P9とP11を結ぶ直線
L8:P11とP10を結ぶ直線
L9:P11とP13を結ぶ曲線
L10:P12とP11を結ぶ曲線
R1:直線L3、L4、及び曲線L6が形成する領域
R2:曲線L6から靴底外方へ向かう領域
R3:曲線L4と直線L2が形成する領域
R4:直線L2と曲線L5が形成する領域
R5:直線L3と曲線L5が形成する領域
R6:直線L8、曲線L10、及び曲線L6が形成する領域
R7:曲線L10と直線L7が形成する領域
R8:直線L7と曲線L12が形成する領域
R9:直線L8と曲線L12が形成する領域
1:靴底に突設される突起
2:突起1の上底
3:突起1の下底
4:突起1の垂直片
5:突起1の斜面
【特許請求の範囲】
【請求項1】
イ。第1中足骨の下方側縁端P1から第5中足骨の中央P2に至る180度の直線を歩行時のベクトル方向が切り替わる境界線CL1とし、
ロ。第1中足骨のほぼ中央外縁端P3から第2中足骨の下方及び第3中足骨の下方を経て、
立方骨の中央、踵骨の上方及び距骨の中央側縁端P4に抜ける曲線をL1とし、
ハ。前記直線CL1と前記曲線L1との交点をP5とし、前記P1とP5を結ぶ直線をL2とし、前記P5とP2を結ぶ直線をL3とし、
ニ。前記P3とP5を結ぶ曲線をL4とし、前記P5とP4を結ぶ曲線をL5とし、
ホ。第2末節骨の外側縁端P6及び第2中足骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L3と、前記L4、及び前記曲線L6が形成する領域を領域R1とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L4及び前記直線L2が形成する領域を領域R3とし、
4.前記直線L2及び曲線L5が形成する領域を領域R4とし、且つ
5.前記直線L3及び曲線L5が形成する領域を領域R5として、
I:前記領域R1に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R3に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
IV:前記領域R4に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R5に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【請求項2】
イ。内側楔状骨の下方側縁端P9から中間楔状骨のほぼ中央を斜めに横断し、第3中足骨の下端を経て第4中足骨のほぼ中央、及び第5中足骨のほぼ中央外縁端P10に至る靴底の斜め外方へ向かう直線を、歩行時のベクトル方向が切り替わる境界線CL2とし、
ロ。第1中足骨のほぼ中央外縁端P12から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P13に至る曲線をL9とし、
ハ。前記直線CL2と前記曲線L9との交点をP11とし、前記P9とP11を結ぶ直線をL7とし、前記P11とP10を結ぶ直線をL8とし、
ニ。前記P12とP11を結ぶ曲線をL10とし、前記P11とP13を結ぶ曲線をL12とし、
ホ。第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L8と、前記曲線L10、及び前記曲線L6が形成する領域を領域R6とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L10及び前記直線L7が形成する領域を領域R7とし、
4.前記直線L7及び曲線L12が形成する領域を領域R8とし、且つ
5.前記直線L8及び曲線L12が形成する領域を領域R9として、
I:前記領域R6に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R7に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
IV:前記領域R8に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R9に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【請求項1】
イ。第1中足骨の下方側縁端P1から第5中足骨の中央P2に至る180度の直線を歩行時のベクトル方向が切り替わる境界線CL1とし、
ロ。第1中足骨のほぼ中央外縁端P3から第2中足骨の下方及び第3中足骨の下方を経て、
立方骨の中央、踵骨の上方及び距骨の中央側縁端P4に抜ける曲線をL1とし、
ハ。前記直線CL1と前記曲線L1との交点をP5とし、前記P1とP5を結ぶ直線をL2とし、前記P5とP2を結ぶ直線をL3とし、
ニ。前記P3とP5を結ぶ曲線をL4とし、前記P5とP4を結ぶ曲線をL5とし、
ホ。第2末節骨の外側縁端P6及び第2中足骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L3と、前記L4、及び前記曲線L6が形成する領域を領域R1とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L4及び前記直線L2が形成する領域を領域R3とし、
4.前記直線L2及び曲線L5が形成する領域を領域R4とし、且つ
5.前記直線L3及び曲線L5が形成する領域を領域R5として、
I:前記領域R1に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R3に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
IV:前記領域R4に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R5に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【請求項2】
イ。内側楔状骨の下方側縁端P9から中間楔状骨のほぼ中央を斜めに横断し、第3中足骨の下端を経て第4中足骨のほぼ中央、及び第5中足骨のほぼ中央外縁端P10に至る靴底の斜め外方へ向かう直線を、歩行時のベクトル方向が切り替わる境界線CL2とし、
ロ。第1中足骨のほぼ中央外縁端P12から第2中足骨の下方及び第3中足骨の下方を経て、立方骨の中央、踵骨の上方及び距骨の中央側縁端P13に至る曲線をL9とし、
ハ。前記直線CL2と前記曲線L9との交点をP11とし、前記P9とP11を結ぶ直線をL7とし、前記P11とP10を結ぶ直線をL8とし、
ニ。前記P12とP11を結ぶ曲線をL10とし、前記P11とP13を結ぶ曲線をL12とし、
ホ。第2末節骨の外側縁端P6及び第2中節骨の外側縁端P7に沿って、第3基節骨のほぼ中央を経て、第4基節骨及び第5基節骨のほぼ中央P8を抜ける曲線を曲線L6とし、
1.前記直線L8と、前記曲線L10、及び前記曲線L6が形成する領域を領域R6とし、
2.前記曲線L6から靴底外方へ向かう領域を領域R2とし、
3.前記曲線L10及び前記直線L7が形成する領域を領域R7とし、
4.前記直線L7及び曲線L12が形成する領域を領域R8とし、且つ
5.前記直線L8及び曲線L12が形成する領域を領域R9として、
I:前記領域R6に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
II:前記領域R2に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させ、
III:前記領域R7に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
IV:前記領域R8に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を爪先方向へ向けて突設させ、
V:前記領域R9に対応する靴底を、平行な上底2及び下底3と、上底2及び下底3と接続する垂直片4と、斜面5とから成る台形から成る横断面を有する複数個の突起1の斜面5を踵方向へ向けて突設させたことを特徴とした靴底。
【図1−1】


【図1−2】

【図2】
【図3−1】
【図3−2】
【図4】
【図5−1】
【図5−2】
【図6】
【図7】
【図7−1】
【図7−2】
【図7−3】
【図7−4】

【図7−5】
【図8】
【図9】

【図10】

【図10−1】
【図10−2】
【図10−3】

【図10−4】
【図10−5】
【図11】
【図12】
【図12−1】
【図12−2】
【図12−3】
【図12−4】
【図12−5】
【図1−2】
【図2】
【図3−1】
【図3−2】
【図4】
【図5−1】
【図5−2】
【図6】
【図7】
【図7−1】
【図7−2】
【図7−3】
【図7−4】
【図7−5】
【図8】
【図9】
【図10】
【図10−1】
【図10−2】
【図10−3】
【図10−4】
【図10−5】
【図11】
【図12】
【図12−1】
【図12−2】
【図12−3】
【図12−4】
【図12−5】
【公開番号】特開2012−200582(P2012−200582A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−87727(P2011−87727)
【出願日】平成23年3月23日(2011.3.23)
【特許番号】特許第4962811号(P4962811)
【特許公報発行日】平成24年6月27日(2012.6.27)
【出願人】(000167820)広島化成株式会社 (65)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月23日(2011.3.23)
【特許番号】特許第4962811号(P4962811)
【特許公報発行日】平成24年6月27日(2012.6.27)
【出願人】(000167820)広島化成株式会社 (65)
【Fターム(参考)】
[ Back to top ]