
株式会社IHIにより出願された特許
171 - 180 / 5,014
プラズマ光源とプラズマ光発生方法
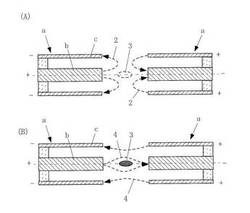
【課題】2つの同軸状電極内に発生した面状放電を同軸状電極間の管状放電に繋ぎ変える電流路の繋ぎ変えの安定性を高め、プラズマ光源の出力、安定性、信頼性を高めることができるプラズマ光源とプラズマ光発生方法を提供する。
【解決手段】2つの同軸状電極a内の中心電極bとガイド電極cとの間に発生した面状放電2を同軸状電極間の管状放電4に繋ぎ変える「繋ぎ変え時点」が、同軸状電極aに対する放電電圧による放電電流のピーク時点より前に設定されている。
(もっと読む)
プラズマ光源

【課題】2つの同軸状電極内に発生した面状放電を同軸状電極間の管状放電に繋ぎ変える電流路の繋ぎ変えの安定性を高め、プラズマ光源の出力、安定性、信頼性を高めることができるプラズマ光源を提供する。
【解決手段】ガイド電極14と真空チャンバー22との間に絶縁板26が挟持され、ガイド電極14は真空チャンバー22から絶縁されている。また1対のガイド電極14の先端部を電気的に直接結合する連結導電体32を備え、その中央部のみが接地されている。
(もっと読む)
移動体の相対姿勢計測方法と装置
【課題】2つの移動体の相対姿勢を精度よく求めることができる手段を提供する。
【解決手段】第1の移動体3に第1の方位センサ9を設け、第2の移動体5に第2の方位センサ11を設ける。第1の方位センサ9は、第1の移動体3から見た、第1基準方向D1に対する第2の移動体5の方位θ1を計測する。第2の方位センサ11は、第2の移動体5から見た、第2基準方向D2に対する第1の移動体3の方位θ2を計測する。計測した方位θ1と方位θ2とに基づいて、第1基準方向D1と第2基準方向D2との相対関係θtを、第1および第2の移動体の相対姿勢として求める。
(もっと読む)
表面硬化用Co基合金
【課題】表面硬化用として好適である時効硬化性Co基合金を提供する。
【解決手段】Crを25.0質量%以上45.0質量%以下、Feを8.0質量%以上35.0質量%以下、Siを1.0質量%以上5.0質量%以下、Bを0.2質量%以上2.0質量%以下、WとMoの少なくとも一種を合計で6.0質量%以下、Niを12.0質量%以下、Cu、Mnを3.0質量%以下、Al、Ti、Nbを1.0質量%以下、Cを0.2質量%以下含有し、Ni、Cu、Mn、Al、Ti、Nb、Cの合計量が12.0質量%以下であり、残部が30.0質量%以上60.0質量%以下のCoおよび不可避不純物からなることを特徴とする表面硬化用Co基合金。
(もっと読む)
プラズマ光源とプラズマ光発生方法
【課題】同軸状電極内に発生する面状放電(電流シート)の密度を高め、かつ同軸状電極内の周方向に均一な面状放電を生成することができるプラズマ光源とプラズマ光発生方法を提供する。
【解決手段】1対の同軸状電極10の中心電極12とガイド電極14との間に、中心電極とガイド電極間の浮遊容量Csより大きい静電容量C2を有する補助コンデンサ18をそれぞれ備え、補助コンデンサ18により中心電極とガイド電極間の電圧を放電電圧より短い周期で変動させて、擬似的に高周波の面状放電2を発生させる。
(もっと読む)
プラズマ光源の製造方法
【課題】多孔体金属の表面において発光物質の浸み出しが均一化されたプラズマ光源の製造方法を提供する。
【解決手段】1対の同軸状電極10間に管状放電を形成してプラズマを軸方向に封じ込めるプラズマ光源の製造方法であって、各同軸状電極10は、棒状の中心電極12と、中心電極12を間隔を隔てて囲む管状のガイド電極14と、中心電極12とガイド電極14の間に位置しその間を絶縁するリング状の絶縁体16とからなり、絶縁体16は、内側と外側の絶縁性緻密部分16aと、その間に挟持された導電性多孔部分16bとからなり、導電性多孔部分は、導電性金属の微粒子を焼結して多孔体に成形し、多孔体の形状を機械加工し、多孔体におけるプラズマと対向する面及び反対面について、電解エッチングすることによって製造される。
(もっと読む)
防液堤
【課題】被災後に発生する大量の瓦礫の処理を可能とすると共に被災後に建設材料の確保が容易な防液堤を提供する。
【解決手段】防液堤であって、内部に収容物を収容可能なプレキャストコンクリートの収容容器3を複数備え、各収容容器3同士が水平方向及び鉛直方向に接続されて一体化されて形成されている。
(もっと読む)
加工装置及び加工機械の構造仕様設計方法
【課題】再生びびり振動が発生する原因を明らかにして、加工機械の再生びびり振動安定のための設計指針を提供する。
【解決手段】先端に切削工具1を備えたスライド軸50と、スライド軸の先端近傍を支持する油静圧軸受装置52と、スライド軸の後端に接続してスライド軸のスライドを駆動する駆動装置53と、油静圧軸受装置と駆動装置との間に備えられスライド軸を滑り移動可能に支持して送り機構の摩擦を模擬する滑り軸受装置58と、油静圧軸受装置と滑り軸受装置との間に備えられ工具部の軸方向変位を模擬してばね定数を変更可能な第1のばね手段63と、滑り軸受装置と駆動装置との間に備えられ駆動装置の動力伝達部の軸方向変位を模擬してばね定数を変更可能な第2のばね手段64と、滑り軸受装置に軸受予荷重Pを付与してスライド軸の摩擦力を調節可能な摩擦力調整手段59と、摩擦力調整手段による軸受予荷重を計測する予荷重計測手段62と、切削工具の軸方向変位を計測する工具変位計測手段66とを備える。
(もっと読む)
延長管着脱装置
【課題】最終曲げ位置より後方に位置するチューブの直管部が短い場合に、直管部を延長する延長管を自動で着脱でき、かつチューブの外径が変わる場合でも、高さ調整が不要である延長管着脱装置を提供する。
【解決手段】チューブ1の後端に外径が同一の延長管12を着脱する延長管着脱装置であって、チューブと延長管の下面を同一高さで水平に支持するサポート14と、延長管を待機高さHからサポート上に位置する着脱高さLまで下降させ、チューブの後端部を把持し、延長管の先端部をチューブの後端部に挿入する延長管移動装置と、延長管の先端部を拡大又は縮小してチューブと延長管を連結又は分離する延長管連結装置とを備える。延長管移動装置の昇降駆動装置24は、上限高さと下限高さとの間で昇降駆動される昇降金具と、支持金具とからなるフロート機構を有し、昇降金具は上限高さから下降し、支持金具から下方に遊動して下限高さまで下降する。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
171 - 180 / 5,014
[ Back to top ]