
株式会社荏原製作所により出願された特許
981 - 990 / 1,477
洗浄部材、基板洗浄装置、基板処理装置
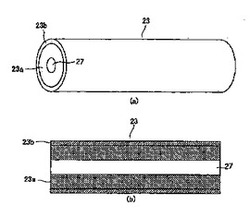
本発明は基板の洗浄面に洗浄部材を接触させると共に洗浄液を供給し両者の相対的運動により、該洗浄面を洗浄する基板洗浄装置の洗浄部材に係る。洗浄部材は、防水性のコア部を具備し、該コア部の表面を多孔質高分子素材で被覆した被覆層を設けたことを特徴とする。 (もっと読む)
電解処理装置及び電解処理方法

【課題】特に大面積で、表面に薄く電気抵抗が大きな導電層が形成された基板であっても、この表面に、膜厚の面内均一性の高いめっき膜を形成できるようにする。
【解決手段】基板Wを保持する基板保持部と、基板Wと接触して基板の表面に通電させる第1の電極88と、基板保持部で保持した基板Wの表面に対面する位置に配置される第2の電極98と、基板保持部で保持した基板Wと第2の電極98との間に配置される圧力損失が500kPa以上または見掛気孔率が19%以下の多孔質構造体110と、基板保持部で保持した基板Wと第2の電極98との間に電解液を注入する電解液注入部104と、第1の電極88と第2の電極98との間に電圧を印加する電源114を有する。
(もっと読む)
復水脱塩方法及び復水脱塩装置
【課題】 カチオン樹脂とアニオン樹脂から溶出する有機性不純物由来の硫酸イオン及び硝酸イオン濃度が低い、高純度な処理水質を得ることができる復水脱塩方法及び装置を提供する。
【解決手段】 原子力発電プラントの復水をイオン交換樹脂で脱塩処理する方法において、前記イオン交換樹脂が、強酸性均一粒径ゲル型カチオン樹脂と強塩基性1型ガウス粒径分布アニオン樹脂を混合した混床を形成しており、該形成した混床の上層部から下層部までほぼ均一にカチオン樹脂とアニオン樹脂が混合されている状態で、復水を処理することとしたものであり、前記カチオン樹脂としては、架橋度が10%から16%で、平均粒径値が450〜600μmであり、平均粒径値±100μmの範囲に樹脂粒存在率が95%以上となるようなイオン交換樹脂を用いることができる。
(もっと読む)
送液装置及びその運転方法
【課題】 送液ポンプの据え付けや保守の利便性に優れると共に、緊急時に液体の流路を迅速に遮断できる送液装置及びその運転方法を提供すること。
【解決手段】
液体貯留槽1と、該液体貯留槽1に開口する吸入口40aを備えたコラム管10と、該コラム管10内に設置される送液ポンプ30とを備え、液体貯留槽1に貯留された液体をコラム管10を通して移送先へ送液する送液装置において、コラム管10に、吸入口40aに当接しこれを閉止する蓋体42を備えてなるサクションバルブ機構40を設置し、送液ポンプ30が蓋体に載置された状態で吸込口40aが開口し、送液ポンプ30が蓋体42から離間すると吸入口40aが閉止するように構成し、送液ポンプ30の吸込口48に、緊急時に該吸込口48を閉止することで液体貯留槽1の液体のコラム管10への流入を阻止する緊急遮断弁50を設置した。
(もっと読む)
ポリッシング方法
【課題】半導体ウエハをトップリングに装着したまま、該トップリングをターンテーブル外にずらすことなく、被研磨面の膜厚をリアルタイムで検出できるポリッシング方法を提供する。
【解決手段】回転するターンテーブル1とターンテーブル1とは独立に回転するトップリング3を有するポリッシング装置により、ターンテーブル1の研磨面に、トップリング3で保持した酸化膜が形成された被研磨物を押圧し、被研磨物の被研磨面を研磨するポリッシング方法であって、ターンテーブル1内に設けられた投光部7および受光部8からなる膜厚測定センサSを、被研磨物の中心の位置する軌道上に配置し、センサSによって被研磨面の半径位置が異なる複数点の酸化膜の膜厚時間変化を検出し、被研磨面の研磨プロファイルをトップリング3のバックサイドプレッシャーを用いて研磨中に制御する。
(もっと読む)
混合器及び反応装置
【課題】充分な生産速度を得ることができ、かつ反応を連続的に行って生産システムを自動化することができるような混合器を提供する。
【解決手段】この混合器は、連続処理を行う反応システムにおいて用いる混合器である。これは、それぞれ異なる流体を供給する少なくとも2つの導入流路20と少なくとも1つの導出流路22を有する混合空間14を形成する容器16と、混合空間14に配置された撹拌子18と、この攪拌子18を駆動する駆動機構28とを有する。撹拌子18を駆動することにより、混合空間14において流体が強制的に撹拌され、迅速にかつ確実に混合される。
(もっと読む)
研磨方法及び研磨装置
【課題】 特に各段の研磨プロセス間での基板の表面状態の計測を可能な限り省略してスループットを高め、しかも研磨条件(研磨レシピ)を改善させた多段研磨プロセスを行うことができるようにする。
【解決手段】 複数の被研磨物が保管されたカセットから被研磨物を取出し、表面に複数段の研磨を行ってカセットに戻す操作を順次繰返す研磨方法であって、カセットから取出した被研磨物に対し、予め設定した研磨条件での複数段の研磨と各段の研磨前後における被研磨物表面の測定をそれぞれ行う第1の研磨処理と、前記測定結果を基に修正した研磨条件で所定の段における研磨を行う第2の研磨処理の一方を行う。
(もっと読む)
基板処理ユニット、基板搬送方法、基板洗浄処理ユニット及び基板めっき装置
ロボットアーム等の基板搬入機構を基板の搬入後速やかに基板の把持から解放し、基板を保持する時間を短縮し、スループットを向上させることができる基板処理ユニット、基板搬送方法、基板洗浄処理ユニットおよび基板めっき装置を提供する。基板11を所定の保持位置に保持する基板保持機構10と該基板保持機構で保持された基板に所定の処理を施す処理機構32を備えた基板処理ユニットにおいて、基板を保持位置近傍に案内するガイドピン15を具備する基板ガイド機構20を設け、基板保持機構は基板の保持位置外周上に複数のローラー14を備え、複数のローラーは保持位置近傍にある基板をその外周を挟持して保持するようになっており、ローラーは大径部と大径部の上部に小径部が一体に形成された構造であり、大径部の上部に基板搬送の際に基板を仮置きできる肩部を備え、肩部には外周に向かって下がる勾配の傾斜面が形成される。 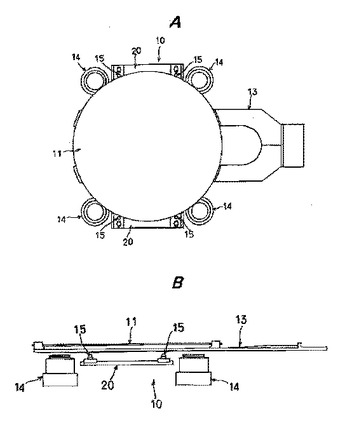 (もっと読む)
(もっと読む)
研磨装置
【課題】研磨工具の被研磨物への押付け力を被研磨物を固定するワーク側に持たせることにより、軸受回転機構の小型化、該軸受回転機構を支承する可動アームの構造を簡素化できる研磨装置を提供する。
【解決手段】研磨工具11が取付けられた回転体12と、回転体12を非接触で回転自在に支持する磁気軸受回転機構10と、被研磨物Wが固定されたX−Yステージ(ワーク)20を備え、回転する研磨工具11を被研磨物Wに押し当て研磨すると共に、X−Yステージ20の移動により研磨範囲を決定する研磨装置において、X−Yステージ20側に吸引電磁石30を設けると共に、研磨工具11側に磁性体を設け、研磨工具11の被研磨物Wへの押圧力を吸引電磁石30の磁気吸引力で調整する。
(もっと読む)
電解加工装置および電解加工方法
【課題】例えばダマシン法により基板上の配線を形成する場合に、基板にダメージを与えることなく、低い圧力で基板の表面を全面にわたって均一に平坦化することができる電解加工装置を提供する。
【解決手段】電解加工装置10は、表面に金属膜が形成されたウェハを保持しつつ、ウェハを回転させるウェハホルダ14と、ウェハに対して電解加工を行う電解加工ユニット16とを備えている。電解加工ユニット16は、回転可能な加工電極52と、加工電極52に取り付けられた研磨パッド53と、研磨パッド53をウェハに押圧する押圧機構72と、電解加工液をウェハと加工電極52との間に供給する液供給機構と、ウェハと加工電極52とを相対運動させる相対運動機構と、加工電極52がカソード、ウェハの金属膜がアノードとなるように、加工電極52とウェハの金属膜との間に電圧を印加する電源103とを備えている。
(もっと読む)
981 - 990 / 1,477
[ Back to top ]