
株式会社ダイヘンにより出願された特許
141 - 150 / 990
ロボット制御装置、教示装置及びロボットシステム
【課題】
教示装置と通信が確立していないときに、障害が発生したロボット制御装置側から教示装置に対して通信確立を要求するため、複数のロボット制御装置の中から作業者が、障害が発生しているロボット制御装置との通信を迅速かつ正確に確立することができるロボット制御装置、教示装置及びロボットシステムを提供する。
【解決手段】
ロボット制御装置20の通信制御部22は障害が発生したときに、特定のティーチペンダント10と無線通信が確立していない場合、特定のティーチペンダント10に関する接続先情報を宛先にした通信確立要求を出力する。第3記憶部24cは返信された特定のティーチペンダント10に関する送信元の固有の送信元情報を記憶する。通信制御部22は通信確立要求応答があった後、送信元情報を宛先として、返信したティーチペンダント10に対して交信を行う。
(もっと読む)
2ワイヤ溶接制御方法

【課題】消耗電極アークにフィラワイヤを送給して溶接する2ワイヤ溶接方法において、消耗電極と溶融池との短絡に起因する溶接状態の不安定を抑制する。
【解決手段】消耗電極と母材との間にアークを発生させて溶融池を形成し、フィラーワイヤを溶融池に送給しながら溶接する2ワイヤ溶接制御方法において、消耗電極と溶融池とが短絡状態Tsになり、この短絡状態Tsが初期期間Ti以上継続しているときは、フィラーワイヤの送給速度Fwを定常フィラーワイヤ送給速度Fcから減速フィラーワイヤ送給速度Fdへと減速させ、消耗電極と溶融池との間がアーク状態になると(t43)、フィラーワイヤの送給速度Fwを定常フィラーワイヤ送給速度Fcに戻す。これにより、短絡に伴って溶融池の温度が低下しても、それに応じてフィラワイヤの送給速度Fwが減速されるので、溶接状態が不安定になることを抑制できる。
(もっと読む)
高張力鋼板のレーザ・アークハイブリッド溶接方法及びこれにより得られる高張力鋼板溶接金属
【課題】引張強度が780乃至980MPa級の中厚の高張力鋼板をレーザ・アークハイブリッド溶接する際に、鋼板の組成により最適な溶接材料を選択して溶接し、高い引張強度及び高い靱性を有する溶接金属が得られる高張力鋼板のレーザ・アークハイブリッド溶接方法及びこれにより得られる高張力鋼板溶接金属を提供する。
【解決手段】高張力鋼板のレーザ・アークハイブリッド溶接において、Tiの含有量が0.03質量%以下の高張力鋼板をTiの含有量が0.06質量%以下の溶接材料を使用してレーザ・アークハイブリッド溶接する。溶接材料は、その組成から算出される炭素当量CeqYが、高張力鋼板の炭素当量CeqXに対して所定の範囲を満足するものを選択することにより、高い引張強度及び靱性を両立させた溶接金属が得られる。
(もっと読む)
2ワイヤ溶接制御方法
【課題】アーク長を周期的に変化させて溶接する2ワイヤ溶接方法において、高速溶接性を向上させる。
【解決手段】ピーク期間中のピーク電流及びベース期間中のベース電流を1パルス周期として繰り返して溶接ワイヤ1に通電し、切換信号Stcに同期してアーク長Laを第1アーク長HLaとそれよりも短い第2アーク長LLaとに周期的に切り替えて溶融池2を形成し、フィラーワイヤ6を溶融池2に送給して溶接する2ワイヤ溶接制御方法において、フィラーワイヤ6の送給速度Wsを、第1アーク長HLaのときは第1フィラーワイヤ送給速度LWsに設定し、第2アーク長LLaのときは第1フィラーワイヤ送給速度LWsよりも高速の第2フィラーワイヤ送給速度HWsに設定する。アーク長が短いときのフィラーワイヤの送給速度が高速になるので、溶融池の冷却効果が増大し、高速溶接性が向上する。
(もっと読む)
周波数検出装置
【課題】不平衡成分や高調波成分の影響を受けることなく電力系統の周波数を高い精度で検出する。
【解決手段】周波数検出装置1Aは複素係数BPFを含む外乱除去部2Aで電力系統の三相交流電圧vu,vv,vwに含まれる不平衡成分及び高調波成分を除去し、周波数検出部3Aで三相交流電圧の基本波成分のみを用いて電力系統の周波数fsを検出する。周波数検出部3Aは、外乱除去部2Aから出力される互いに直交する二相電圧(cos(2πfs・t),sin(2πfs・t))を、通過帯域での位相差特性がf=p・ψ+qの関係を有する複素係数BPFからなる第2複素係数フィルタ部14に入力し、その出力信号(cos 2πfs・t+ψ),sin(2πfs・t+ψ))と入力信号との位相差ψを位相差算出部15で算出する。周波数算出部16でその位相差ψに対する位相特性の関係式を演算することにより電力系統の周波数fsを算出する。
(もっと読む)
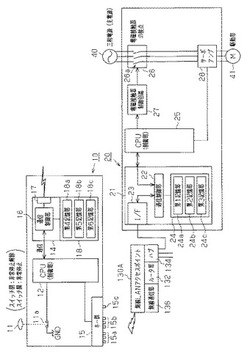
パルスTIG溶接ロボットの制御方法及び制御システム
【課題】パルスTIG溶接において、ベース電圧を利用した倣いができない。
【解決手段】
外部パルス信号受信判別器52はパルス信号のピーク電圧区間及びベース電圧区間を判定する。電圧抽出器53は設定された指定電圧区間における実溶接電圧V1をサンプリング周期毎に抽出する。差電圧算出器56は抽出した実溶接電圧V1の平均電圧値とアーク基準電圧との差を算出し、トーチ動作方向判定器57及びトーチ動作方向判定器57により、溶接トーチ11の動作方向とトーチ動作量を得る。ロボット制御装置20は溶接トーチ11とワークW間の距離を制御して倣い制御する。ピーク電圧区間だけでなく、ベース電圧区間を利用して倣い制御ができ、溶接環境に適応した倣いを行うことができる。
(もっと読む)
ワーク搬送システム、および搬送室用フレーム構造体
【課題】ワーク搬送時の振動を抑制するのに適したワーク搬送システムを提供する。
【解決手段】ワーク搬送システムAは、ワーク搬送装置4が配置される搬送室1と、搬送室1に隣接して設けられ、ワーク収納用の容器21が載置されるロードポート2と、を備える。搬送室1は、鋼材により構成されるフレーム構造体1Aを含む。フレーム構造体1Aは、床面6に設置され、ワーク搬送装置4が載置される第1フレーム部材11と、この第1フレーム部材11に対して起立状に設けられ、ロードポート2を支持する第2フレーム部材12と、を備える。ワーク搬送装置4が載置されるフレーム構造体1Aは、鋼材によって構成されているため、比較的に比重が大きく、かつ剛性が高い。これにより、ワーク搬送装置4によるワーク搬送の際に当該ワーク搬送装置4において振動が生じても、フレーム構造体1Aにおける振動を抑制することができる。
(もっと読む)
ワーク搬送装置
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
溶接装置および炭酸ガスアーク溶接方法
【課題】スパッタが低減し、溶接品質が向上した炭酸ガスアーク溶接方法および溶接装置を提供する。
【解決手段】溶接装置は、トーチと母材との間に電圧を与えるための電源回路と、電源回路の電圧を制御する電源制御装置とを備える。電源制御装置は、短絡期間Tsの後に続くアーク期間の初期の第1アーク期間Ta1にハイレベル電流が出力され、アーク期間の後期の第2アーク期間Ta2に定電圧制御された溶接電圧に対応したアーク電流が出力されるように、電源回路を制御する。電源制御装置は、ハイレベル電流に一定周波数かつ一定振幅で増減する波形を重畳してハイレベル電流が発生されるように電源回路を制御する。波形の重畳により、溶滴がアーク反力によってせり上がることを防止して、溶滴の形成を安定させることができる。
(もっと読む)
コンバータ制御装置、およびこのコンバータ制御装置を用いた系統連系インバータシステム
【課題】並列接続された各DC/DCコンバータの寿命を可及的に均一化させるコンバータ制御装置を提供する。
【解決手段】コンバータ制御装置8に、運転させるDC/DCコンバータの台数を決定する台数決定部83と、運転させるDC/DCコンバータの優先順位を決定する優先順位決定部86と、決定された運転台数と運転優先順位とに基づいて、運転させるDC/DCコンバータを決定する運転制御部87とを設けた。優先順位決定部86は、積算異常回数に1を加算した値を積算電力量に乗算した算出値を算出し、当該算出値が小さいほど優先順位が高くなるように決定するようにした。算出値が小さいほど優先的に運転されるので、各DC/DCコンバータの積算電力量が均一化され、何らかの問題が生じている可能性があるDC/DCコンバータの使用が制限される。これにより、各DC/DCコンバータの寿命が均一化される。
(もっと読む)
141 - 150 / 990
[ Back to top ]