
株式会社ダイヘンにより出願された特許
831 - 840 / 990
2電極アーク溶接のアークスタート制御方法
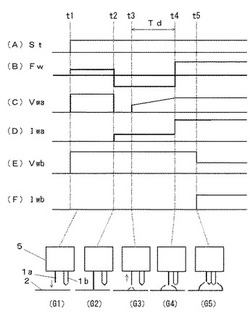
【課題】 消耗電極1a及び非消耗電極1bを溶接トーチ先端の1つのシールドガスノズル5内に設け、消耗電極アーク及び非消耗電極アークを発生させて溶接する2電極アーク溶接において、高周波放電高電圧を印加しないでスパッタのないアークスタートを実現する。
【解決手段】 本発明は、消耗電極を母材へ前進送給し、母材と接触すると後退送給し、消耗電極が母材から離れると小電流値の初期アークを発生させ、この初期アークを維持しながら後退送給を所定期間Td継続してアーク長を高くし、期間が経過すると消耗電極を定常送給速度で再前進送給して大電流値の定常アークに移行させ、この定常アークによって非消耗電極と母材との空間にプラズマ雰囲気を充満させて非消耗電極アークを発生させる2電極アーク溶接のアークスタート制御方法である。
(もっと読む)
高電圧電源装置

【課題】カットオフ電圧以上の高電圧の印加で発振動作する負荷に高電圧を供給する高電圧電源装置に関し、装置の構成を簡単にしてコストダウンと小型化とを達成する。
【解決手段】カットオフ電圧以下のベース電圧Vaを生成してマグネトロン12に供給するベース電圧供給手段と、カットオフ電圧以下でベース電圧VOFFとの加算によりカットオフ電圧以上となる制御電圧Vbを生成してベース電圧Vaに加算する制御電圧加算手段と、ベース電圧VOFFに対する制御電圧Vbの加算の断続制御を行うスイッチング手段9とを有し、ベース電圧供給手段のベース電圧出力部は、ダイオード8を介してマグネトロン12のアノードおよびスイッチング手段9の一端に接続されており、ダイオード8とマグネトロン12のアノードとスイッチング手段9の一端との接続点がアース電位である。
(もっと読む)
プラズマ処理システムのアーク検出装置
【課題】プラズマ処理装置において発生するソフトアークの発生を確実に検出することのできる、プラズマ処理システムのアーク検出装置を提供する。
【解決手段】本願発明のプラズマ処理システムのアーク検出装置は、高周波電力を発生する高周波電源装置1と、高周波電源装置1から供給される高周波電力によりプラズマを発生させて被加工物Bに所定の加工処理を行うプラズマ処理装置4とを備えるものであって、プラズマ処理装置4のプラズマ処理中に、プラズマ処理装置4からの反射電力の変化を示す情報を検出する検出し、この反射電力の変化に関する情報の変化パターンに基づいて、プラズマ処理装置4における被加工物の加工品質に悪影響を与える微小なアークの発生を検出するアーク検出部17を備える。
(もっと読む)
移動用変圧器及びその注油方法並びに抜油方法
【課題】変圧器本体側と冷却器側とが分離された状態で別々に現地へ輸送され、また、現地で容易に結合または分離されるようにした移動用変圧器を提供する。
【解決手段】継手3aと配管3bとが接続され、配管3bにバルブV8及びフローサイトA1を設けた配管4が接続されると共に、バルブV9及びフローサイトB1を設けた配管5が接続されてなる配管3と、継手7aとバルブV2とが接続され、配管7bにバルブV5及びフローサイトA2を設けた配管8が接続されると共に、バルブV6及びフローサイトB2を設けた配管9が接続されてなる配管7とを、変圧器本体1側で着脱自在となるように変圧器本体1と冷却器2との間に接続する。バルブV9とフローサイトB1との間の配管5と、配管2aとの間にバルブV10を設けた配管6を接続し、バルブV6とフローサイトB2との間の配管9と、配管2bとの間にバルブV7を設けた配管10を接続する。
(もっと読む)
ロボット制御装置
【課題】ロボットの異常動作、誤動作を防止する。
【解決手段】ロボット110を駆動するサーボモータ116を位置検出手段117からの検出出力に応じて制御するサーボ制御部10,20と、サーボモータに対する通電と遮断とを切り替え可能な切り替え部31,32と、サーボモータを監視する監視部50とを備え、監視部は二つの処理演算部51,52を有し、当該各処理演算部は、それぞれ個別に、位置検出手段が示す動作位置が許容動作位置を越えるか否かを判定して許容動作位置を越える場合に切り替え部によりサーボモータの通電を遮断する処理を行う。
(もっと読む)
燃料電池発電システムの燃料供給方法
【課題】燃料電池発電システムへの燃料ガスの供給に使用する昇圧機の消費電力を低減し、システムの総合的な発電効率を向上させること。
【解決手段】本発明は、燃料ガス1を主昇圧機4によって高圧燃料ガス7にし、この高圧燃料ガス7を含む燃料を燃料電池に供給して発電する燃料電池発電システムの燃料供給方法において、補助昇圧機41を前記主昇圧機4に並列に設け、前記昇圧機の負荷が定格負荷であることを燃料ガス1の流量によって判別したときは前記主昇圧機4のみを運転し、重負荷であることを流量によって判別したときは前記主昇圧機4及び前記補助昇圧機41を共に運転する燃料電池発電システムの燃料供給方法である。
(もっと読む)
コージェネレーションシステムの保護方法
【課題】熱交換器へ供給される給水量が低下又は断水したとき、熱交換器内の温度や圧力が異常に上昇して熱交換器を損傷することが無く、エネルギー効率を高めることができ、システムが大型化することが無いコージェネレーションシステムの保護方法を提供する。
【解決手段】コージェネレーションシステムの保護方法は、燃料電池等の発電発熱器によって電気及び高温の排気ガスを発生し、電気は電気回路を介して負荷又は電力系統に供給し、排気ガスは熱交換器に供給しこの熱交換器の水路に給水して温水に変化させて給湯するコージェネレーションシステムの保護方法において、熱交換器への給水量が低下又は断水したときは排気ガスに空気または窒素ガスを混入して温度を低下させることによって熱交換器が異常高温高圧になるのを防止している。
(もっと読む)
搬送装置
【課題】クリーンプロセスにおける真空雰囲気下で熱の影響に耐えうる板状ワークの搬送装置を提供する。
【解決手段】搬送装置A1は、固定ベース1と、固定ベース1に対して旋回可能に保持された旋回ベース2と、この旋回ベース2に対して揺動可能に支持されたリンクアーム機構3と、リンクアーム機構3に支持されたハンド4とを備え、旋回ベース2およびリンクアーム機構3の動作に伴いハンド4でワークを水平に保持しながら搬送するものである。旋回ベース2と固定ベース1との間には、気密シール23Aが設けられているとともに、固定ベース1および旋回ベース2には、冷媒循環路が設けられており、この冷媒循環路の一部は、気密シール23Aの近傍に配置されている一方、冷媒循環路は、固定ベース1と旋回ベース2との境界に形成した環状空間110A,210Aを含んで構成される。
(もっと読む)
産業用ロボットの制御方法
【課題】マニピュレータとワークとの相対的な位置関係にズレが生じたとしても既教示データを教示修正することなく、そのまま再利用することができる産業用ロボットの制御方法を提供する。
【解決手段】教示時に教示点の位置姿勢データをユーザ座標系を基準としたユーザ座標値データで記憶し、再生時にこのユーザ座標値データ及びユーザ座標系に基づいてベース座標値データを算出し、このベース座標値データに基づいてロボットの各関節角度データを算出し、ワークが基準位置とは異なる位置に設置されたときは、複数の特徴点の位置を再指定してユーザ座標系を再定義し、再生時にユーザ座標値データ及び再定義されたユーザ座標系に基づいてベース座標値データを再算出し、この再算出されたベース座標値データに基づいてロボットの各関節角度データを算出することを特徴とする。
(もっと読む)
肢体訓練装置
【課題】両足と腰部とを連動して動作させることにより、歩行動作向上を適切に図る訓練を実現可能な肢体訓練装置を提供すること。
【解決手段】使用者の腰部を方向zにおいて支持可能な座面2aを有する座2と、方向xにおいて座2を挟んで離間配置されており、かつ使用者の脚部先端寄りの部分を保持する脚部保持部33R,33Lをそれぞれ有する1対のアーム3R,3Lと、を備える肢体訓練装置A1であって、各アーム3R,3Lは、回転軸x31R,x31Lまわりの揺動と、回転軸x31R,x31Lに対して脚部保持部33R,33Lが接近離間する往復動とが自在とされており、座2は、回転軸z2まわりの揺動と、回転軸x2まわりの揺動とが自在とされており、1対のアーム3R,3Lを互いに反対方向に揺動させるとともに、上記揺動による脚部保持部33R,33Lの移動方向に沿う回転軸z2まわりの回転方向に座2を揺動させる構成とされた制御部5を備えている。
(もっと読む)
831 - 840 / 990
[ Back to top ]