
株式会社ダイヘンにより出願された特許
981 - 990 / 990
屋内設置変圧器用冷却装置のファン制御方法
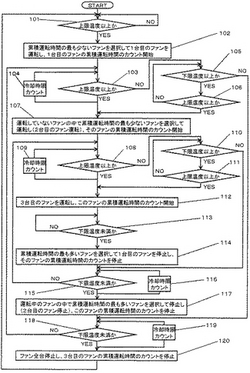
【課題】屋内設置変圧器用冷却装置の複数台のファンを変圧器の温度または負荷電流の値に応じて台数制御する際に、各ファンの運転時間を均一化し、ファンの利用効率を最大にするとともにファンの長寿命化を図る。
【解決手段】屋内設置変圧器用冷却装置の複数台のファンを台数制御する際に、各ファンの累積運転時間をカウントしておいて、各ファンの累積運転時間に応じて、運転台数を増やすときには累積運転時間の短いファンから運転し、運転台数を減らすときには累積運転時間の長いファンから停止するようにした。
(もっと読む)
ロボット制御装置

【課題】正確にパンチ先端の位置及びワークを把持するロボットのハンドの位置を予測し、ロボットハンドを移動させることができ、安定したプレス加工を行うことができる産業用ロボット制御装置を提供。
【解決手段】位置検出器でパンチが動作するパンチ速度vを演算し、
パンチ速度vにおけるパンチの位置PBに対応したハンドの位置 TBaに補正する補正量
f(v)= TBa−TB を算出するパンチ速度vにおける演算遅れに対する補正量f(v)を演算し、TBの位置に対するサーボ遅れ演算を
f(s)= TBa×位置ループゲイン×1/(1−T)とし(ただしTはサーボの積分定数)て演算し、ロボットのサーボ遅れを一次遅れで近似して求め、
最終同期位置 TB"=同期演算部で演算された予想位置TB+f(v)+f(s)
として、最終同期位置 TB"を演算するようにした。
(もっと読む)
溶接用ワイヤ送給装置
【課題】本発明は、溶接ワイヤ送給装置の高寿命化及び軽量化を図ることを目的としている。
【解決手段】リール軸を取付けたリール軸取付け部材の上端部及び下端部を折り曲げて、コの字状に形成して、これらの折り曲げた両面をボックス式ケースの天板内面及び底板内面にそれぞれ固定し、リール軸取付け部材の両側部の全体を、リール軸を取付けた面の裏面方向に折り曲げて、コの字状に形成して、かつ、これらの折り曲げた両先端部をケース側板内面と接触させて、リール軸取付け部材の裏面及び折り曲げた両側部とケースの天板及び底板及び側板とで密閉空間を形成する。そして、ワイヤ送給機構のワイヤ送給速度を制御する制御部を、密閉空間内に取付けた溶接用ワイヤ送給装置である。
(もっと読む)
交流パルスアーク溶接方法
【課題】電極マイナス電流の通電とピーク電流及びベース電流の通電とを1パルス周期として溶接電流Iwの通電を繰り返す交流パルスアーク溶接にあって、1パルス周期中の電極マイナス電流の時間積分値が溶接電流値の時間積分値に占める比率である電極マイナス電流比率を電極マイナス電流比率設定値によって設定し、消耗電極である溶接ワイヤの送給速度を送給速度設定値によって設定して溶接を行う交流パルスアーク溶接方法において、溶接電流の平均値及び電極マイナス電流比率の条件設定を迅速かつ正確に行えるようにする。
【解決手段】本発明は、溶接電流の平均値を溶接電流設定値Isによって設定し、この溶接電流設定値Is及び上記の電極マイナス電流比率設定値Rsを入力として予め定めた変換関数回路FSCに基づいて送給速度設定値Fscを演算して自動設定する交流パルスアーク溶接方法である。
(もっと読む)
インバータ装置の制御方法
【課題】 インバータ装置の選択順位を考慮しないで決定された起動台数だけ選択すると、特定のインバータ装置のみが選択されてインバータ装置の寿命を短くする。
【解決手段】 直流電源に複数台のインバータ装置を並列接続し、出力電力値に基づいてインバータ装置の起動台数を決定し、各インバータ装置の出力電力を積算して積算電力値を算出し、少ない順に決定された起動台数だけを選択し、選択されたインバータ装置が前周期から起動しているときはそのまま継続し停止しているときは起動させるインバータ装置の制御方法において、各インバータ装置が停止から起動へと変化した回数を各インバータ装置ごとにカウントして積算起動回数値を算出し、各インバータ装置ごとの積算電力値と積算起動回数値とを乗算して積算電力起動回数値を算出し、積算電力起動回数値の少ないインバータ装置から順に選択することを特徴とするインバータ装置の制御方法である。
(もっと読む)
パルスアーク溶接電源
【課題】シールドガスに不活性ガスのみを使用し、ピーク電流及びベース電流からなる溶接電流Iwを通電すると共に、消耗電極1と母材2との間の溶接電圧Vwを検出しこの溶接電圧検出値Vdをパルス波形の基準電圧波形Vcからの所定変動範囲内Vc±ΔVcで制限して溶接電圧制限値Vftを算出し、この溶接電圧制限値Vftを平均化した溶接電圧制限平均値Vfaが予め定めた電圧設定値Vsと略等しくなるように溶接電源の出力を制御するパルスアーク溶接電源において、異常電圧が重畳してもアーク長に比例した電圧値を溶接電源の電圧計に表示することができるようにする。
【解決手段】本発明は、溶接電圧検出値Vdに代えて溶接電圧制限値Vft又は溶接電圧制限平均値Vfaを、溶接電源に配設した電圧計VM及び/又は外部機器とのインターフェース端子への入力信号とするパルスアーク溶接電源である。
(もっと読む)
高周波電力供給システム
高周波電力供給システムは、高周波電源1の出力端Aから負荷L側の回路で発生する異常を検出する異常検出装置3を備える。異常検出装置3は高周波の進行波の電圧値Vfを検出する第1検波部21と、高周波の反射波の電圧値Vrを検出する第2検波部22と、進行波電圧値Vfと反射波電圧値Vrとから反射係数の微分値dΓ/dtを演算する反射係数演算部23及び微分演算部24と、反射係数の微分値dΓ/dtに基づいて異常発生の有無を判定する異常判定部25とで構成される。異常検出装置3から高周波電源1に異常検出信号が出力されると、高周波電源1の電力出力動作は停止させる。
(選択図 図1)
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
TIG溶接におけるアークスタート方法
【課題】 本発明は、タッチスタート方式における、アーク発生時の電極の消耗、及び電極溶着の防止を実現する。
【解決手段】 溶接トーチを被溶接物に接触させ引き離し時にアークを発生させるアークスタート方法において、電極先端と被溶接物との間に短絡検出用電源から印加した微少電流によって接触を検知し、この接触検知後に補助電源の出力の供給を開始して、アーク発生に必要な小さな電流を通電させ、通電状態で電極先端を被溶接物から引き離すことによってアーク起動を行いアーク発生検出によって、溶接電源の出力の供給を開始するTIG溶接におけるアークスタート方法。
(もっと読む)
電子サイクロトロン共鳴プラズマ発生装置
【目的】プラズマ室を構成するベルジャーの内面に金属薄膜が形成されるのを防ぎ、長期間に亘る使用を可能にする。
【構成】円筒導波管103のフランジ部103aとメインチャンバーに取り付けたフランジ金具102との間に、両者に対して絶縁された終端部材110とマイクロは導入板111とを配置し、これらをフランジ金具102に対して固定する。円筒導波管103内に配置したベルジャーを終端部材110により支持し、終端部材110に設けた環状の板部110aにより、フランジ金具102の内周部とイオン引出し電極106の外周部との間の領域をベルジャー105内の空間から遮蔽する。マイクロ波導入板111と円筒導波管のフランジ部103aとの間にチョークを構成する。
(もっと読む)
981 - 990 / 990
[ Back to top ]