
東京計器株式会社により出願された特許
1 - 10 / 103
モータの異常診断装置
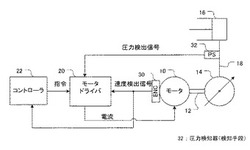
【課題】簡単な構成でモータに発生したガタ等の異常を正しく診断することができるモータの異常診断装置を提供する。
【解決手段】モータ10に駆動信号を出力するモータドライバ20と、モータの回転速度を検出する回転速度検出センサ30と、モータドライバに指令信号を出力するコントローラ22とを備え、コントローラ22は、モータの回転を周期的に変化させる異常診断指令信号を出力し、異常診断指令信号によってモータドライバを介してモータの回転が周期的に変化したときの回転速度検出センサからの回転速度検出信号を時系列的に順次取り込み、取り込まれた回転速度検出信号に基づき、異常の診断を行う。
(もっと読む)
船舶用自動操舵装置

【課題】保針中、変針中のいずれにも左右されることなく潮流成分を推定することができる船舶用自動操舵装置を提供する。
【解決手段】推定器18が、方位誤差の推定を行う方位制御系推定器18Aと、航路誤差の推定を行う航路制御系推定器18Bと、対地座標系での潮流の推定を行う対地座標系潮流推定器18Cと、を備えており、対地座標系潮流推定器18Cは、センサから得られた船体の方位(ψ)及び対地座標系における船体の位置(x,y)から、参照方位を用いずに推定潮流ベクトル(dx^,dy^)の推定を行う。
(もっと読む)
船舶用自動操舵装置
【課題】操舵機の飽和状態を回避しつつ、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置を提供する。
【解決手段】計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部30と、推定潮流成分を、参照方位発生部30で出力する参照方位に基づき座標変換を行う座標変換部40と、座標変換部40で座標変換された潮流速度成分から潮流に対抗する斜航角βdを求める潮流修正部42と、参照方位ψRにするための参照舵角δRと斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部46と、推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部28と、を備える。参照方位発生部30は、参照舵角δRが舵角設定部28で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生する。
(もっと読む)
超音波レール探傷装置
【課題】異なる検出範囲に対応する複数のチャネルを有し、該複数のチャネルに対応して設けられた複数の超音波探触子から超音波パルスをレールに送信し、その反射エコーからレールの傷を検出する超音波レール探傷装置において、搭載される車両の検査中の走行速度を速くして、検査時間を短縮することを可能にする。
【解決手段】複数の超音波探触子12a〜12gは、その検出範囲に対応する受信時間に応じて、第1間隔で超音波パルスを送信する1つ以上の超音波探触子12a、12b、12e、12fと、第1間隔よりも大きい第2間隔で超音波パルスを送信する1つ以上の超音波探触子12c、12d、12gとの少なくとも2グループに分けられており、それぞれ対応する間隔で超音波パルスを送信する。
(もっと読む)
レール欠線部検出装置
【課題】鉄道レールを走行する車両に搭載可能で、分岐器の欠線部を検出するレール欠線部検出装置を提供する。
【解決手段】1つのレールに対応して互いに離間して複数配置され、且つレールに上方から対向してレールが存在するか否かに相当するいずれかの検知信号を出力するように構成された少なくとも3つのセンサ14a、14b、14cと、これらのセンサ14a、14b、14cからの検知信号の組み合わせによって、欠線部であるか否かを判定する信号処理回路と、を備える。
(もっと読む)
コモンレール
【課題】分岐部分の応力集中を低減することができ、さらにその組立を容易にすることができるコモンレールとする。
【解決手段】貫通孔12aが形成されたレール部品12と、分岐部品14と、直列に配置されたレール部品12と分岐部品14の列を収容する外管16と、外管16の端部にあって、レール部品12と分岐部品14の列を押圧する押圧部材18と、を備える。分岐部品14は、隣接するレール部品12の端壁面12b及び貫通孔12aの開口に対面する端壁面14c、14dを有し、さらに分岐部品14には、1つの端壁面14cに開口して貫通孔12aに連通し、貫通孔12aよりも小径で互いに分離された複数の分岐孔14a、14bが形成されており、押圧部材18によりレール部品12の端壁面12bと分岐部品14の端壁面14c、14dとが互いに押圧されてシールされる。
(もっと読む)
船舶用自動操舵装置
【課題】船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有する船舶用自動操舵装置において、最適な変針軌道計画を実現し、安定的、効率的な操船を可能とする。
【解決手段】軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度初期値C1aと旋回角速度C2aとの初期値がゼロでない場合にその値を取り込んで参照針路を演算する。初期値をゼロとした場合の変針量ΔψRと最大舵速度δ'Rとの関係に基づき、変針量ΔψRに応じて最大舵速度δ'Rを求める。そして、その舵速度δ'Rを用いて初期値がある場合の各モードの参照針路の演算を行なう。
(もっと読む)
船舶用自動操舵装置
【課題】船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有する船舶用自動操舵装置において、最適な変針軌道計画を実現し、安定的、効率的な操船を可能とする。
【解決手段】軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、前記フィードフォワード制御器は、
【数1】
ここで、KS、TS、TS3は船体パラメータで、それぞれ旋回力ゲインと
2つの時定数、sはラプラス演算子である。の伝達特性を持つ。
(もっと読む)
船舶用自動操舵装置
【課題】パラメータの不確かさの存在下で閉ループの安定性を図ることができる船舶用自動操舵装置を提供する。
【解決手段】制御対象18からの検出方位から外乱を除去した推定値を出力する推定器24と、推定器からの推定値と設定方位から得られる値に対してフィードバックゲインを乗じて命令舵角を出力する状態フィードバック制御器22とを有するフィードバック制御器12を備え、命令舵角に応じて舵角を経て船体に作用させる操舵機及び船体を含む制御対象18と共に閉ループを構成する。フィードバックループの特性多項式と、船体モデルと波浪モデルと舵角オフセットモデルとを推定する多項式からなる推定器24の特性多項式からなる閉ループの特性多項式により、推定器の船体モデルの固有角周波数ωeを設定する。
(もっと読む)
放電ランプ装置
【課題】放電ランプと発振源とのインピーダンス整合を図り、発振源からの電力を効率よく放電ランプに供給することができる放電ランプ装置を提供する。
【解決手段】放電ランプ10と発振源42との間に設けられ、中心導体22と外導体30とを有する同軸チューナー20を備える。同軸チューナー20は、放電ランプ10側から、放電ランプ10が取り付けられるランプ取付部と、第1特性インピーダンス部分と、第2特性インピーダンス部分と、第3特性インピーダンス部分と、を有しており、第1特性インピーダンス部分と第3特性インピーダンス部分の特性インピーダンスが同一に設定され、第2特性インピーダンス部分が第1特性インピーダンス部分及び第3特性インピーダンス部分と異なる特性インピーダンスに設定される。
(もっと読む)
1 - 10 / 103
[ Back to top ]