
JUKI株式会社により出願された特許
31 - 40 / 1,557
ポケット布の折込み装置
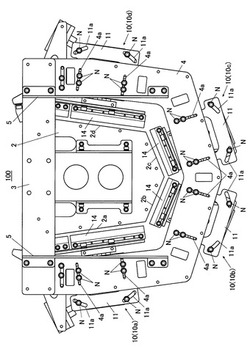
【課題】ポケット布を様々なポケット形状に折り分けるための調整が容易なポケット布の折込み装置を実現する。
【解決手段】折込み装置100における折り刃ユニット10を、型板1及び押え板2を囲う第1ベース部材4の長穴4aに沿って進退させながら、折り刃14が配設されたシリンダ13部分を回動させる調整を行うことで、型板1及び押え板2に対するシリンダ13の距離に関する配置調整と、シリンダ13の向き(角度)に関する配置の調整を並行して行うことで、型板1及び押え板2に対する折り刃ユニット10の配置調整を容易に且つ速やかに行うことを可能にした。
(もっと読む)
ミシンの糸巻き装置

【課題】ボビン台の回転速度調節範囲を拡大する。
【解決手段】ボビン台20と、ボビン台上でボビンに巻く縫い糸の端部を切断して保持するクランプ21と、ミシンモータにより回転駆動を行う駆動車31と、駆動車の回転平面に当接してトルク伝達が行われると共に支軸40を介してボビン台を回転させる糸巻き車30と、ボビンに巻かれた縫い糸が一定量に達すると当該縫い糸に押圧されて回動する検出レバー70と、各部を支持する土台50と、検出レバーの回動動作により糸巻き車を駆動板から離間させる動力切断機構80と、検出レバーの所定方向の回動動作によりボビン台を一定の回転角度で制止させる制止機構90とを備え、糸巻き車は、支軸に沿って位置を調節することにより駆動車からの伝達回転速度を変更可能であり、制止機構は、支軸に設けられた回転体に対して嵌合保持するカム機構を有し、回転体を糸巻き車と別部材のボビン台から構成している。
(もっと読む)
ステッピングモータの制御装置
【課題】2相ステッピングモータにおいて、各励磁コイルに流れる電流量の不平衡を改善して正常なモータ駆動を実現すること。
【解決手段】励磁コイル(LA)の一端を電源(E)又はグラウンド(G)に接続するハーフブリッジ回路(11A)と、励磁コイル(LB)の一端を電源又はグラウンドに接続するハーフブリッジ回路(11B)と、各励磁コイルの他端の共通接続点を電源又はグラウンドに接続するハーフブリッジ回路(11C)とを有し、駆動パルスによって各ハーフブリッジ回路をオンオフする駆動回路(1)と、各ハーフブリッジ回路に対する駆動パルスを生成して、A相電流及びB相電流を制御する制御回路(2)とを備え、制御回路は、A相電流の指令値と実測値との偏差と、B相電流の指令値と実測値との偏差とを相互に補完するように、各ハーフブリッジ回路に対する駆動パルスを生成する構成とした。
(もっと読む)
部品供給装置及び実装装置
【課題】異形部品やリードの付いたコネクタ等の部品を、実装装置に対して所望な姿勢で供給すること。
【解決手段】部品(P)を基材に対して実装する実装装置(1)に、部品(P)を供給する部品供給装置(2)であって、部品(P)の搬送路(42)上において、基板(W)に対する実装面(72)を一方向に向けた所定の姿勢の部品(P)を通過させ、所定の姿勢以外の部品(P)を搬送路(42)から外す振り分け部(43)と、振り分け部(43)において揃えられた部品(P)の姿勢を、搬送路(42)に設けた窪み(54)によって実装装置(1)に取り出される姿勢に姿勢変更する落とし込み部(44)とを備えた。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止する。
【解決手段】針棒12を上下動軸心周りに回動させる針棒回動機構30と、針板の下側で糸寄せ部材51により下糸の糸寄せを行う糸寄せ機構50と、被縫製物を水平面に沿って任意の移動方向に移動させて任意の位置に針落ちを行わせる布移動機構80と、縫製データに基づいて布移動機構を制御する制御部90とを備え、当該制御部は、前記移動機構による各針落ちごとの前記被縫製物の移動方向が予め定められた第一の角度範囲である場合には糸寄せ機構による糸寄せを実行し、移動方向が予め定められた第二の角度範囲である場合には針棒回動機構による針棒の回動を実行する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
電子部品実装装置
【課題】搬送対象の電子部品を適切に確認することができ、効率よく高い精度で電子部品を搭載することができる電子部品実装装置を提供することを課題とする。
【解決手段】ヘッド支持体に固定され、ノズルで吸着した電子部品またはノズルで吸着する対象の電子部品を撮影するカメラユニットと、を有し、カメラユニットは、画像を撮影するカメラとカメラの前記ノズルに近い側に隣接して配置されカメラの撮影領域に向けて光を照射する第1照明部とカメラの前記ノズルから遠い側に隣接して配置されカメラの撮影領域に向けて光を照射する第2照明部と第1照明部から照射される光の一部を遮蔽するバッフルとで構成されるカメラモジュールと、ヘッド支持体に固定されカメラと第1照明部と第2照明部とバッフルとを支持するブラケットと、を備えることで上記課題を解決する。
(もっと読む)
エンコーダ信号フィルタ装置
【課題】モータの速度変化時にも安定的にエンコーダ信号からノイズの影響を排除する。
【解決手段】ステッピングモータ104の軸角度を検出するエンコーダ105と、その検出信号をフィードバックしつつ、ステッピングモータに速度指令を与えて動作制御を行う制御手段91とを備えるエンコーダ信号フィルタ装置90において、制御手段によるステッピングモータの速度指令に基づいて遮断周波数を調整する速度検出部20と、遮断周波数に基づいて、エンコーダからの検出信号に含まれるノイズを除去するフィルタ処理部40とを備えている。
(もっと読む)
電子部品実装装置及び電子部品実装方法
【課題】効率良く高精度な部品認識・部品搭載を行うことができる電子部品実装装置及び電子部品実装方法を提供する。
【解決手段】電子部品を回路基板5への搭載角度が大きい順にソートし、電子部品の吸着順を決定すると共に、各電子部品を吸着した後に回転させる量をそれぞれ決定する。この回転量は、全ての電子部品を順次吸着・回転した結果、全ての電子部品の吸着姿勢がそれぞれの搭載姿勢となるように決定する。そして、全ての電子部品を吸着した後、吸着ノズルに吸着された搭載姿勢の電子部品を順次ビジョン認識し、その認識結果に基づいて、回路基板5上の所定の搭載位置に電子部品を順次搭載する。
(もっと読む)
マウンタ装置の加圧制御ヘッド
【課題】マウンタ装置において、加圧制御ヘッドをシンプルな構成で低コストに提供する。
【解決手段】部品を吸着するノズル131の高さを位置決めするサーボモータ23と、ノズル131が吸着した部品を基板に押し付ける荷重を制御できる加圧制御ヘッド13とを備えるマウンタ装置であって、前記サーボモータ23を、ノズル131が部品を基板に加圧する加圧源としても利用し、前記サーボモータ23の指令レベル論理座標と実際座標の差によって生じる当該サーボモータ23の発生出力トルクにより加圧圧力を可変とする。
(もっと読む)
31 - 40 / 1,557
[ Back to top ]