
富士電機株式会社により出願された特許
1,001 - 1,010 / 3,146
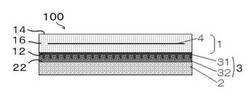
太陽電池モジュール、太陽電池モジュール組立体、およびその製造方法
【課題】 太陽電池モジュールを支持体から取り外し可能にする。
【解決手段】 本発明のある態様においては、太陽電池モジュール1と、太陽電池モジュール1の受光面14とは逆の背面12に固着された面ファスナー3の第1係合素子31と、支持体2と、支持体2の支持面22に固着された面ファスナー3の第2係合素子と32を備える太陽電池モジュール組立体100が提供され、太陽電池モジュール1が可撓性を備えるものとされる。第1係合素子31と前記第2係合素子32とは互いに剥離可能に係合されている。
(もっと読む)
インバータ装置

【課題】端子台カバーを筐体に保持したまま開閉位置に移動して配線,点検作業を行うことができ、また端子台カバーを開いた状態ではインバータが運転モードに入らないようにして安全性の確保が図れるように端子台カバーの取付け構造を改良する。
【解決手段】パワーモジュールなどの基幹部品を内蔵した筐体1の上部前面に操作パネル2を配置するとともに、筐体下部に搭載した端子台3,4を覆って筐体1の前面に端子台カバー5を装備したインバータ装置において、端子台カバー5をスライド式として筐体1に案内支持するようにし、また端子台カバー5は開放位置で操作パネル2のキーを覆うよう設定するとともに、該カバーの上端部には開放位置で操作パネル2の停止キーを押圧してインバータを強制停止させる押込み突起片を設ける。
(もっと読む)
電子膨張弁
【課題】冷媒入口から冷媒とともにゴミが流入しても流入口を安定的に閉成することができる電子膨張弁を提供すること。
【解決手段】冷媒入口と冷媒出口とが設けられた弁本体31と、冷媒入口よりも小径であって冷媒出口に連通する小径流路341を有する弁座34と、常態においては弁座前後における冷媒の圧力差及び円板バネ35に付勢されて弁座34に当接することで小径流路341の流入口341aを閉成し、自身に磁力が作用する場合には前記圧力差による押付力及び円板バネ35の付勢力に抗して弁座34から離隔する方向に向けて移動して流入口341aを開成するアーマチュア32とを備えた電子膨張弁30において、弁座34において流入口341aの周囲を囲繞する態様で配設され、かつ上端面342aがアーマチュア32との接触部位となる環状壁部材342を備えたものである。
(もっと読む)
薄膜太陽電池
【課題】光の閉じ込め効果が高く、膜質の良好な微結晶シリコン系光電変換層が積層された薄膜太陽電池を提供する。
【解決手段】基板1上に、光反射性の第1電極層2と、少なくとも一つの光電変換層4と、光透過性の第2電極層5とが順次積層され、第1電極層2の光電変換層側の表面2に、入射光を乱反射させるための凹凸が形成された薄膜太陽電池において、光電変換層4の少なくとも一つが、微結晶シリコン系光電変換層であり、第1電極層2と光電変換層4との間に、透明導電性高分子材料からなる平坦化層3が配置され、該平坦化層3の光電変換層側の表面が、第1電極層2の光電変換層側の表面よりも平滑にされている薄膜太陽電池。
(もっと読む)
永久磁石形回転機の回転子
【課題】磁石埋め込み型回転電機の回転子を対象に、部品種類の削減,製造コストの低減が図れるように改良した回転子構造を提供する。
【解決手段】コアプレート2の積層ブロック1に永久磁石3を埋め込み、積層ブロックの両端に端板4を重ねてボルト5で締結した上で、回転子軸6にマウントした永久磁石形回転機の回転子で、そのコアプレートには磁石挿入穴2a,回転子軸穴,締結ボルト穴,および回転子軸穴の周上にキー溝2dを打ち抜き形成したものにおいて、コアプレート2のキー溝と2d磁石挿入穴2aの中心位置との間に周方向の相対的ズレ角度θを設定した上で、キー溝2dを基準に積層ブロック1はコアプレート2を同じ向きに揃えて積層し、積層ブロック1の両端には磁石抜け止め用の端板4として、積層ブロックのコアプレート2と表裏逆向きにしたコアプレートを重ね合わせて一体にボルト締結する。
(もっと読む)
真空断熱材
【課題】ピンホールの発生を抑制して断熱性能の低下を防止することができる真空断熱材を提供すること。
【解決手段】平板状の芯材411と、芯材411を密封する態様で熱溶着するための溶着層51、外部からのガスの透過を抑制するガスバリア層52、ガスバリア層52を保護する保護層53及び外部衝撃から保護する外部保護層54が順次積層された4層構造の部分を有するフィルムからなる外被材412とを備え、芯材411を外被材412で被包してその内部を減圧することにより形成され、かつ外縁部に外被材412のみで構成されるヒレ部分412a,412bを有する真空断熱材41において、外被材412は、少なくとも減圧により折れ曲がる部位のフィルム構成が、溶着層51、ガスバリア層52及び保護層53が順次積層された3層構造である。
(もっと読む)
誘導加熱装置、そのための二重管
【課題】
誘導加熱が可能な磁性体である外管と、被加熱流体を通流させる内管との間の、線膨張係数の違いおよび温度ばらつきによって生じる熱応力を緩和することを目的とする。
【解決手段】
円形の外管3と円形の内管4とから構成される二重管と、この二重管内を流れる被加熱流体8を加熱するための誘導加熱手段と、を有する誘導加熱装置である。内管4は線膨張係数が外管3の線膨張係数より小さい非磁性体で構成する。外管3は、磁性体であり、且つ外管の軸方向の長さがそれぞれ所定値以下である複数個の外管構成物31から構成する。
(もっと読む)
電力変換装置
【課題】出力変圧器盤等の周辺設備が無い場合でも、容易に電力変換装置の動作検証ができるようにする。
【解決手段】高圧制御ルートを持つ従来回路に対し、検出器7、電圧平均値演算器10および設定器16a,16b等からなる低圧制御ルートを設け、出力変圧器盤3に周辺設備がない場合には、検出器7で検出されるインバータ出力電圧から演算器10でその平均値を求め、インバータ電圧指令9からインバータ出力電圧平均値を減算して、低圧制御を実行し得るようにする。
(もっと読む)
ロボットシステムおよびロボット制御方法
【課題】
ロボットアーム先端の3次元空間の位置誤差および姿勢誤差を補正する。
【解決手段】
ロボットの動作領域内に予め定めた直方体領域について、オフラインにおける直方体領域の8頂点の理論座標値と、オンラインにおける前記8頂点の実測座標値とから、前記直方体領域内におけるオフラインでの座標値をオンラインでの座標値に補正する座標値補正係数を演算し、前記直方体領域内におけるオフラインでの姿勢をオンラインでの姿勢に補正する角度補正係数を演算し、前記直方体領域内のオフラインで教示された位置および姿勢を前記座標値補正係数と前記角度補正係数とを用いて補正し、補正した位置および姿勢を用いて前記ロボット先端の位置および姿勢を制御する。
(もっと読む)
プログラム自動生成装置、自動生成方法、および、プログラム
【課題】リソースや演算時間の制約が厳しい組込み用途のプログラム開発において当該制約を受けにくいプログラム自動生成装置、自動生成方法、および、プログラムを提供する。
【解決手段】ユーザにより制御ブロック図を用いた仕様記述がなされる(S1)。次に、仕様記述された制御ブロック図を基に接続情報の抽出を行う(S2)。そして接続情報にフィードバックループが含まれるかを検出する(S3)。当該チェックで接続情報にフィードバックループが含まれていなければ、通常対応による制御処理コードを自動生成する(S4)。またフィードバックループが含まれていれば、FB対応による制御処理コードを自動生成する(S5〜S7)。全接続情報について制御処理コードを抽出していればステップS9に進み、いなければステップS3に戻る。FB対応制御処理コード生成処理により生成された制御処理コードと通常対応制御処理コードを合成して出力する(S9)。
(もっと読む)
1,001 - 1,010 / 3,146
[ Back to top ]