
株式会社安川電機により出願された特許
21 - 30 / 2,482
ワーク取出システム、ロボット装置および被加工物の製造方法
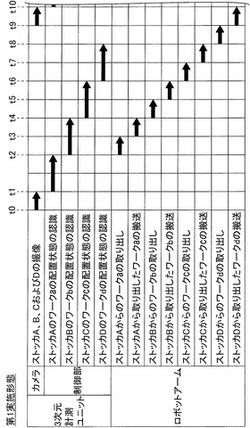
【課題】複数の領域からワークを順次取り出す一連のワーク取出工程に要する時間を短縮することが可能なワーク取出システムを提供する。
【解決手段】このロボットシステム100(ワーク取出システム)は、ストッカA〜Dに配置されたワークa〜dをロボットアーム11により取り出すロボットシステム100であって、ワークa〜dの配置状態を検出する3次元計測ユニット3を備え、3次元計測ユニット3は、ストッカA〜Cに配置されたワークa〜cを取り出すワーク取出動作がロボットアーム11により行われている間に、他のストッカB〜Dに配置されたワークb〜dの配置状態を検出するように構成されている。
(もっと読む)
固定子および回転電機

【課題】固定子コイルからの熱をフレーム側に伝え難くした固定子および回転電機を提供する。
【解決手段】フレーム(3)の略円筒状の周壁内面(31)に当接して設けられており、固定子コイルが巻回されたコア本体(11)と、固定子コイルのコイルエンドを樹脂によりモールドしたモールド部(12)とを備えた固定子(1)である。そして、周壁内面(31)とモールド部(12)との間には空隙部(7)が形成されている。
(もっと読む)
回転電機
【課題】反負荷側軸受の冷却を良好に行うことが可能な回転電機を提供すること。
【解決手段】実施形態の一態様に係る回転電機は、筒状のモータフレームと、筒状のモータカバーと、冷却ファンとを備える。モータフレームは、固定子および回転子を内蔵する。モータカバーは、モータフレームを収納し、反負荷側に冷却風の吸気孔を備え、負荷側に冷却風の排気方向を反負荷側へ向けた排気孔を備える。冷却ファンは、吸気孔からモータカバーの内部へ冷却風を吸気させ、排気孔からモータカバーの外部へ排気させる。
(もっと読む)
ロボット仕分けシステム、ロボット装置、及び仕分け済み物品の製造方法
【課題】作業者の労力負担を低減しつつ信頼性を向上できるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、及びビジョンセンサ27を有するロボット11と、ロボットコントローラ14とを有しており、レーザセンサ26により搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置に存在する荷物4を特定し、ビジョンセンサ27により上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25により持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
ロボットシステム
【課題】生産性を向上できるようにする。
【解決手段】らっきょう12を搬送するコンベア14と、コンベア14による搬送経路上を搬送されてくるらっきょう12の3次元形状を検知する3次元センサ18と、らっきょう12に対し持ち上げつつ移送する作業を行うためのツールを取り付け可能なロボット16A,16Bと、ロボット16A,16Bに対し動作指令を出力すると共に、3次元センサ18の検知結果に基づき、動作指令の補正を行うコントローラ28とを有しており、コントローラ28は、ロボット16に対し、補正後の動作指令を出力する。
(もっと読む)
アクチュエータおよびアクチュエータの冷却方法
【課題】可動子周辺の温度上昇を抑えること。
【解決手段】実施形態に係るアクチュエータは、リニアモータと、仕切部材と、ファンとを備える。リニアモータは、可動子としてのシャフトを直線的に移動させる。仕切部材は、シャフトの近傍に設けられリニアモータを制御する制御基板とシャフトとの間の空間を仕切る。そして、ファンは、仕切部材よりもシャフト側に設けられ、シャフト側の空間における空気を流動させる。
(もっと読む)
誘導電動機および誘導電動機の回転子
【課題】高温環境下においても支障なく駆動すること。
【解決手段】上記の課題を解決するために、短絡環と、第1の補強部材と、第2の補強部材とを備えるように誘導電動機および誘導電動機の回転子を構成する。短絡環は、筒状の回転子コアの回転軸まわりに環状に配置される複数の導体を、上記の回転子コアの端面それぞれにおいて短絡する。第1の補強部材は、上記の短絡環に対して嵌合される。第2の補強部材は、上記の第1の補強部材に対して嵌合されるとともに、上記の回転軸に対して固定される。
(もっと読む)
ロボット仕分けシステム及び仕分け済み物品の製造方法
【課題】既存の設備で、被仕分け物品に関する仕分けパラメータの変動に柔軟に対応して仕分けを行うことができるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、ビジョンセンサ27を有するロボット11と、ロボットコントローラ14を有しており、レーザセンサ26で搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置にある荷物4を特定し、ビジョンセンサ27で上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25で持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
対象物加工システム
【課題】対象物が不定形物である場合でも、加工の際の対象物間での加工部位のばらつきを抑制できるようにする。
【解決手段】らっきょう切断加工システム10は、コンベア14と、ロボット16と、らっきょう12を検知する3次元センサ18と、らっきょう12の姿勢を検知するカメラ20と、コントローラ28とを有し、コントローラ28は、3次元センサ18の検知結果に基づきらっきょう12の吸着目標部位の設定を行う第1画像処理部281と、吸着パッド166をらっきょう12の吸着目標部位に接触させ当該らっきょう12を持ち上げつつ所定の位置へ移動させるように、ロボット16を制御する第1制御部2861と、カメラ20の検知結果に基づきらっきょう12の加工目標部位の設定を行う第2画像処理部283と、らっきょう12の加工目標部位が切断装置22の刃2221の位置へ導かれるように、ロボット16を制御する第2制御部2862とを有する。
(もっと読む)
光全周エンコーダ及びモータシステム
【課題】製造を容易にしつつ小型化することが可能な、光全周エンコーダ及びモータシステムを提供すること。
【解決手段】回転軸AX上に位置する発光部111が一面側に配置された基板110と、基板110の他面側において回転軸AX周りに回転可能に配置され、回転軸AXを中心とし複数の回転スリットS2,S3を有する2つの回転トラックT2,T3を有するディスク140と、発光部111から照射された光を、ディスク140の外周方向のほぼ全域に向けて放射状に導き、回転トラックT2,T3に導く導光部120とを有し、導光部120は、回転トラックT2に間接的に対向する略リング状の照射入光面126を有し、該面126から回転トラックT2に向けて出射するために光を放射状に導くインクレ用第1導光部123等と、放射状に導いた光の一部を回転トラックT3に導くアブソ用第2導光部1293と、を有する。
(もっと読む)
21 - 30 / 2,482
[ Back to top ]