
株式会社安川電機により出願された特許
71 - 80 / 2,482
ロボットのアーム構造およびロボット
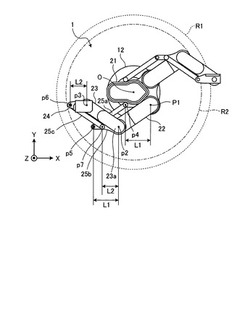
【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
搬送ロボット、筐体、半導体製造装置およびソータ装置

【課題】筐体の大型化および清浄度の低下を防止可能な搬送ロボット、筐体、半導体製造装置およびソータ装置を提供すること。
【解決手段】搬送ロボットの胴体は、上端が前記第1アームの最下部より下方となるよう位置するとともに、前記搬送ロボットが垂直になるよう固定させる固定部が設けられた垂直面を有する板状のプレートと、前記垂直面に設けられた昇降機構と、前記第1アームを回転自在に支持し、前記昇降機構によって前記垂直面を昇降可能であって、前記垂直面と平行な側面を有する箱体状の移動ユニットとを備える。
(もっと読む)
ロボット
【課題】ケーブル等と周辺機器との干渉をより抑制できるようにしたロボットを提供する。
【解決手段】アームと、該アームの先端に取り付けられた手首部とを備えた、ロボットであって、手首部は、アームの先端に取り付けられてアームの長さ方向の第1軸回りに回転する胴体と、胴体の先端に取り付けられて第1軸に直交する第2軸回りに揺動する揺動体と、揺動体の先端に取り付けられて第3軸回りに回転する回転体と、を備え、回転体に取り付けるエンドエフェクタに接続される可撓性を有する非コイル状のケーブルを、胴体の内部に通し、胴体の第1軸の軸心と交わる位置に開口して設けた通過口から引き出してエンドエフェクタまで延設し、かつ、揺動体が第1軸の軸方向に延びた状態で胴体の通過口から揺動体の途中までの範囲において、第1軸および第2軸に直交する方向に開放された空間にケーブルを通した。
(もっと読む)
ロボットのアーム構造およびロボット
【課題】ロボットを小型化すること。
【解決手段】実施形態に係るアームユニットは、固定ベース部と、第1アーム部と、第2アーム部と、モータと、第1伝達ベルトと、第2伝達ベルトと、中継部材とを備える。第1アーム部は、第1減速機を介して固定ベース部と連結され、第2アーム部は、第2減速機を介して第1アーム部と連結される。そして、第2伝達ベルトは、モータの駆動力を中継部材に対して伝達し、第1伝達ベルトは、第2伝達ベルトから中継部材を介して伝達されるモータの駆動力を第1減速機へ伝達する。
(もっと読む)
回転電機
【課題】フィードバック制御とそのための相対角度検出を不要とし、2組の界磁磁極部の相対角度を直接目標値に正確に調整でき、さらなる広範囲高効率運転が達成できる可変界磁式の回転電機を提供する。
【解決手段】固定子巻線と固定子鉄心を設置した固定子と、界磁用磁石が設置された複数の磁極部が2組に分かれて相対的に回動する回転子と、2組の磁極部を相対的に回動する機構を有する回転電機において、前記機構は、シャフトに対して回動する磁極部を支持する部材とねじ嵌合し、シャフトの外側を軸方向に移動自在な部材と、前記軸方向に移動自在な部材を軸方向に移動させるための送りねじ機構と、前記送りねじ機構と回転子とともに回転する部材を連結するベアリングと、前記送りねじ機構を回転させる制御モータとを有することを特徴とする回転電機。
(もっと読む)
リニアモータの可動子およびリニアモータ
【課題】推力の変動を低減することができるリニアモータの可動子およびリニアモータを提供すること。
【解決手段】本願の開示するリニアモータ100の可動子110は、電機子111と、主極磁石列130と、補極磁石132a,132bとを備える。電機子111は、直線状に配列された複数のティース116を有し、各ティース116にコイル113が巻装される。主極磁石列130は、電機子111のティース116側に配置され、異なる極性の主極磁石131a,131bがティース116の配列方向に沿って交互に配列される。補極磁石132a,132bは、主極磁石列130の一端または両端に隣接して配置される。
(もっと読む)
リニアモータの固定子およびリニアモータ
【課題】小型化を図ることができるリニアモータの固定子およびリニアモータを提供すること。
【解決手段】本願の開示するリニアモータ100の固定子120は、直線状に延在するヨーク部121と、ヨーク部121から突出し、ヨーク部121の延伸方向に一定の間隔で配列された複数の突極122とを備える。ヨーク部121は、当該ヨーク部121を設置対象140に固定するボルト160が取り付けられる貫通孔123を備えている。
(もっと読む)
ゲート駆動回路および電力変換装置
【課題】P型電界効果トランジスタとN型電界効果トランジスタとが同時にオン状態になる期間内で発生する短絡電流に起因する消費電力の増大を抑制するともに、パワー素子を高速スイッチングさせることが可能なゲート駆動回路を提供する。
【解決手段】このゲート駆動回路11は、PchFET12と、NchFET13と、駆動信号が入力される入力側とPchFET12のゲート(G)およびNchFET13との間に設けられ、電源電位VCCに接続されているツェナーダイオード14およびツェナーダイオード15とを備え、ツェナーダイオード14および15は、PchFET12およびNchFET13のゲート(G)に印加される電圧を、PchFET12およびNchFET13のゲート(G)の閾値電圧側にシフトさせるように構成されている。
(もっと読む)
ロボットおよびロボットシステム
【課題】アーム等の部位の位置ずれを防止すること。
【解決手段】実施形態に係るロボットは、減速機42aと、第1のシャフト61と、モータ41aと、第2のシャフト62と、外部ブレーキ44aとを備える。減速機42aは、入力部422へ入力される回転を減じて出力する。第1のシャフト61は、入力部422に対して接続される。モータ41aは、第1のシャフト61を回転させる。第2のシャフト62は、入力部422に対して接続される。外部ブレーキ44aは、第2のシャフト62の回転を規制する。
(もっと読む)
携帯遠隔操作装置およびロボットシステム
【課題】表示部へ表示された教示データから容易にコマンドを視認することができること。
【解決手段】所定の動作をロボットへ実行させる命令ごとに表示色を設定し、設定された表示色を命令に関連付けて記憶する。また、命令をロボットへ教示するティーチングによって作成された教示データを命令に関連付けられて記憶された表示色に基づいて表示部へ表示する。さらに、表示部へ表示された教示データの表示色を所定の操作によって設定された表示色へ一時的に変更して表示部へ表示するよう携帯遠隔操作装置およびロボットシステムを構成する。
(もっと読む)
71 - 80 / 2,482
[ Back to top ]