
オリエンタルモーター株式会社により出願された特許
1 - 10 / 150
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
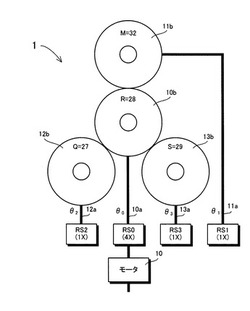
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置

【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
ギヤードモータ
【課題】 高さ寸法がモータの軸方向寸法に影響されることなく小さく、モータのみが突出することもなく薄型であり、バックラッシュを除去するための複雑な機構が不要であり、かつ安価なギヤードモータを提供する。
【解決手段】 1段目ピニオンとしてのモータピニオン22が一体に形成されたモータ軸21を有するモータ20と、前記モータピニオンと噛合する直交軸ギヤ35および、該直交軸ギヤ35と回転軸を共通にする2段目ピニオン36を有する減速軸34が設けられた第1のギヤケース30と、前記減速軸34に設けられた2段目ピニオン36と噛合する円環状平歯車44を有する中空出力軸60が設けられた第2のギヤケースと40を備えてなる。
(もっと読む)
遠心型羽根車
【課題】 高効率の遠心型羽根車の設計に際し、翼の回転中心と翼の先端を結ぶ線を複数の翼が交差するように翼の長さを設定し、送風効率がもっとも大きくなるような遠心羽根車の基本形状を示したものである。そして、必要不可欠な3つの設計寸法から容易に、高効率の遠心型羽根車を設計することが可能となる遠心型羽根車を提供すること。
【解決手段】 モータ軸に連結した主板2と、この主板2に対向して設けた側板3とを備え、前記主板2と前記側板3との間に、反回転方向に傾斜した翼4を円周方向に一定間隔で複数設けた遠心型羽根車において、前記翼4の回転中心Oと翼4の先端T2を結ぶ線Lを複数の翼4が交差するように翼4の長さを設定した遠心型羽根車。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
直交軸ギヤードモータ
【課題】 ギヤードモータの取り付け方向の自由度が高く、製品強度が高く、かつコンパクトな直交軸ギヤードモータを提供する。
【解決手段】 モータ出力軸21に対してギヤ出力軸を直交する方向に配設した直交軸ギヤードモータであって、前記モータ出力軸21に設けられたピニオン21aと噛合するフェースギヤ5を支持する減速軸50と、該減速軸50に設けられたピニオン50aと噛合する減速ギヤ6が設けられた前記ギヤ出力軸60とを有し、前記モータ出力軸21と、前記減速軸50と前記ギヤ出力軸60の各々の軸心切断面上が同一平面になるように前記各軸21,50,60を配設した直交軸ギヤードモータ。
(もっと読む)
電動機におけるステータの巻線端末処理構造とその巻線端末処理方法
【課題】 電動機におけるステータの巻線端末処理構造とその巻線端末処理方法を提供する。
【解決手段】 電動機のケース2内に収納され、かつ、ステータコアのスロットに巻線10が分布巻きされるとともに、この巻線10のコイルエンドを、縛り糸によってレーシング処理したステータ1と、前記ステータ1に重ねて前記コイルエンドを覆い、その板面にリード線7を圧入するリード線用溝32が設けられたコイルエンドカバー3とを備え、前記電動機のケース2内に導入されたリード線7を、前記コイルエンドカバー3のリード線用溝32に圧入することによって所定位置まで配設し、前記ステータ1の巻線端10aと接続した巻線端末処理構造にある。
(もっと読む)
アブソリュートエンコーダ装置及びモータ
【課題】組み付けが容易であり高分解能を達成する小型のアブソリュートエンコーダ装置を提供することを目的とする。
【解決手段】本発明は、第1の磁気パターン14(2極)と第2の磁気パターン16(多極)とを有する永久磁石4と、第1の磁気パターン14の磁界を検出する第1の磁気センサ5と、第2の磁気パターン16の磁界を検出する第2の磁気センサ6と、第1及び第2の磁気センサ5,6の出力信号から、回転軸2の絶対的な回転角度を算出する信号処理回路7とを備えるエンコーダ装置1であり、第1及び第2の磁気センサ5,6と信号処理回路7は単一基板8に固定され、第1の磁気パターン14は永久磁石4の内側において軸方向と交わる方向に延びる面上に形成され、第2の磁気パターン16は永久磁石4の外周面に形成される。
(もっと読む)
回転電機のステータにおけるステータカバー構造
【課題】 絶縁フィルムを一切使用せずに、ステータコアとコイルとの絶縁に加え、コモン線結線部の固定と絶縁が可能な回転電機のステータにおけるステータカバー構造を提供する。
【解決手段】 ステータコイル30が巻回される複数の磁極12を内周面側に突出形成したステータコア10に、絶縁材料で形成されたステータカバー20を装着し、該ステータカバー20で覆われた前記磁極部分22にステータコイル30を巻回した回転電機のステータにおけるステータカバー構造において、前記ステータカバー20に、前記ステータコイル30のコモン線結線部30aを係止する係止部を形成したことにある。
(もっと読む)
1 - 10 / 150
[ Back to top ]