
ヤマザキマザック株式会社により出願された特許
1 - 10 / 80
マシニングセンタ
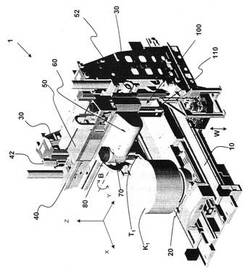
【課題】たて型のマシニングセンタの第1の主軸ユニットにラム軸を持つ第2の主軸ユニットを装備したマシニングセンタを提供する。
【解決手段】マシニングセンタ1はベッド10上にX軸方向に移動する回転テーブル20を有し、コラム30に支持されてZ軸方向に移動するクロスレール40を備える。クロスレールに支持されてY軸方向に移動するサドル50には第1の主軸ユニット60がとりつけられる。第1の主軸ユニット60はB軸まわりに旋回する第1の主軸70を備える。第1の主軸ユニット60とサドル50の間に配設される第2の主軸ユニット100はW軸方向に移動するラム軸110を備え、ラム軸先端に交換自在にとりつけられる旋削加工ヘッドとミル加工ヘッドを備える。
(もっと読む)
複合旋盤装置の制御方法及び複合旋盤装置

【課題】ワークの自重による撓み量の発生による影響及びベッドの剛性が低い鉛直方向の撓み方が変化することによって生ずるピッチングの影響を同時に抑制することができる自動工具交換手段を有する複合旋盤装置、及び制御方法を提供する。
【解決手段】工具主軸25に取付けされた旋削加工工具が、Z軸と直交する水平方向Ytに沿って移動するように、キャレッジ23をY軸方向成分を含む方向に移動制御して、ワーク主軸に取着された加工ワークWに対して旋削加工する。
(もっと読む)
工作機械
【課題】
回転テーブルの振動を検出するための振動センサを新たに設ける必要が無く、回転テーブルに回転アンバランスが生じた場合に生じる回転テーブルの振動を正確に検出することができる工作機械を提供する。
【解決手段】
回転テーブル30は回転アンバランスが生ずると、回転速度とアンバランス量に応じて振動する。このときの振動はボールネジ16を介して、X軸方向の位置ドループの変動として現れる。回転テーブル30の遠心力と、回転テーブル30の振動時の振幅の間には、相関があり、前記遠心力とX軸方向の位置ドループにも相関がある。すなわち、前記振幅とX軸方向の位置ドループには相関があり、X軸方向の位置ドループの変動量を主制御部110が監視し、回転テーブル30の振動を検出する。
(もっと読む)
縦型タレット旋盤
【課題】縦型のタレット旋盤において、ワークの外径加工時にタレット刃物台に装着する内径旋削用工具がワークと干渉することを回避する。
【解決手段】縦型タレット旋盤は、ワークW1を把持して回転するワークテーブルとタレット刃物台50を有してX軸及びZ軸方向に移動する加工ヘッド40を備える。タレット刃物台の工具保持部60の一部に油圧で内径旋削用工具T2を把持するツールホルダ70を取り付ける。自動工具工交換装置100は、タレット式のツールマガジン120とピストン160,162を有し、ツールホルダ70のピン74,76を機械的に押圧して工具T2のクランプ・アンクランプを行う。
(もっと読む)
レーザ加工機
【課題】レーザ光の光路長を短く略一定として加工品質の悪化を防止するレーザ加工機を提供する。
【解決手段】第1開口部4aに沿うように第1ベルト部材B1が配置され、第2導光部に第1移動ユニット50を設け、第1ベルト部材B1は、第2導光部が近接する部分以外X2では第1開口部4aを閉塞するように配置され、第2導光部が近接する部分X1では、第1導光部から離間した位置に配置されて第2導光部5へのレーザ光L4の導入を許容し、反射手段41が、第1移動ユニット50に支持されて、第1導光部4の内部に突出する形で設けられており、第1移動ユニット50には、反射ミラー504を、第1導光部4から離間した位置に配置された状態の第1ベルト部材B1の第1開口部側に、反射手段41から反射されたレーザ光を第2の方向Yに反射し得るように設けて構成される。
(もっと読む)
工作機械のミル主軸
【課題】ミル主軸のスピンドルに供給される切削液のドレン構造の改良を図る。
【解決手段】ミル主軸100はハウジング内に軸受16で支持されるスピンドル20と、スルークーラント通路22を有するドローバー24を備える、回転継手40,50を通る切削液C1はスルークーラント通路22へ送られるが、大量に漏れた切削液C1は、通路110を通ってシリンダ室120内のドッグ130を押し上げる。近接センサ140は、ドッグ130の近接を検知して制御装置に信号を送り、機械を停止する。
(もっと読む)
タンデム駆動の長尺テーブルを有する工作機械
【課題】長尺のテーブルをもつ工作機械のテーブル駆動装置を提供する。
【解決手段】タンデム駆動の長尺テーブルを有する工作機械1は、ベッド10上に摺動自在に支持される長尺のテーブル20を有する。門型のコラム30には加工ヘッド70が設けれ、5面加工を行なう。テーブル20の両端部には2基の駆動装置100,200が装備される。第1の駆動装置100は、固定されたボールネジ110に対してサーボ駆動されるボールナット120を有し、第1のテーブルエンジン150を駆動する。第1のテーブルエンジン150はテーブル20をその長さ寸法の半分程度まで駆動し、第2の駆動装置200に引き渡す。第2の駆動装置200は残りのストロークを駆動する。
(もっと読む)
マシニングセンタ
【課題】マシニングセンタのX軸方向(左右方向)の占有幅を狭くする。
【解決手段】ターンテーブル12のC軸方向の回転と、主軸11のY軸及びZ軸方向への移動とによって工作物の任意の位置を工具の直下に位置決めし、加工することができるので、ターンテーブル12をX軸方向に移動させて加工する場合に比して、装置本体10のX軸方向の占有幅を狭くすることができる。主軸11の回転中心軸とターンテーブル12の回転中心軸とツールマガジン53の回転中心軸は共に、Z軸に対して平行であり、それら回転中心軸と工具交換位置は共にY−Z平面上に配置されている。この配置により工具交換動作が可能となり、しかもマシニングセンタ1のX軸方向の占有幅を狭く構成することが可能となる。
(もっと読む)
プログラマブルの焦点位置決め機能を備えたレーザ加工機
【課題】交換自在なトーチを備えるレーザ加工機において、集光位置をプログラムで自動調整する装置を提供する。
【解決手段】レーザ加工部100は、加工ヘッド110に交換自在に装着されるトーチ130を備える。トーチ130はアシストガス室140とバランス室142を有し、アシストガスAGが供給される。両室には常に同等の圧力が作用し、また受圧面積が等しい為、レンズホルダ150に作用する上向きの第1の力F1と下向きの第2の力F2が相殺される。ガススプリング室144にガスASを供給し、レンズホルダ150に上向きの一定の力を与える。駆動装置200はサーボモータ220で駆動されるアーム260を有し、アーム260はピン180に当接し、レンズホルダ150を所定の位置に移動させて、集光レンズ160の焦点位置FCを自動で調整する。
(もっと読む)
主軸装置用異常検出装置、主軸装置用異常検出方法、及び主軸装置、並びに工作機械
【課題】軸受の潤滑状態の異常発生をリアルタイムに捉えて、軸受の損傷を防止することができる主軸装置用異常検出装置、主軸装置用異常検出方法、及び主軸装置、並びに工作機械を提供する。
【解決手段】主軸装置本体21において、軸受32a,32bにより回転可能に支持される主軸31を回転駆動するモータ33に、電力供給部22により供給される入力電力を電流測定器24及び電圧測定器25により測定する。時系列データ表示部26aには、入力電力値が時系列データとして表示される。入力電圧値に基づいて、軸受32の発熱状態を判断して軸受32の潤滑状態の異常を検出する。
(もっと読む)
1 - 10 / 80
[ Back to top ]