
株式会社ホンダエレシスにより出願された特許
1 - 10 / 105
電動パワーステアリング用モータの故障診断装置
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させることができる、電動パワーステアリング用電子制御ユニットを提供する
【解決手段】電動パワーステアリング用電子制御ユニット(ECU1)は、第1の面実装部品(制御用面実装部品110)が実装される第1基板(制御基板11)と、第1の面実装部品より許容電流容量が高い第2の面実装部品(パワー用面実装部品120)が実装される、第1基板と略同一部品実装面積を有する唯一の第2基板(パワー基板)とを有し、第1基板と第2基板とを積層した基板実装構造から成る。
(もっと読む)
電動パワーステアリング用の電子制御ユニット

【課題】小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットは、外部のバッテリの正極及び負極の電位を入力する第1及び第2の入力端子B+,B−を有する外部コネクタと、電動モータに駆動信号を供給するスイッチング回路、駆動信号の元となる電源電圧を平滑する電解コンデンサ210及びスイッチング回路を制御する制御回路を有する制御基板200と、制御基板200を格納するユニットカバーと、を備える。制御基板200は、ノーマルフィルタとして機能するコイル220及びコモンフィルタとして機能する第1〜第4のセラミックコンデンサC1〜C4を有する。C1の容量は、C3の容量と同じであり、C1の容量よりも小さいC2の容量は、C4の容量と同じである。
(もっと読む)
電動パワーステアリング用の電子制御ユニット
【課題】 小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】 電動モータ43と一体に形成される電動パワーステアリング用の電子制御ユニット43は、電動モータ43に駆動信号を供給するスイッチング回路110を有する第1の基板100と駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する第2の基板200とスイッチング回路100を制御する制御回路を有する第3の基板300と第1の基板100、第2の基板200及び第3の基板300を格納するユニットカバー420とを備える。ユニットカバー420の開口部425は、電動モータ43を格納するモータカバー430によって閉じられ、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向DR1にモータカバー430第3の基板300第2の基板200及び第1の基板100の順で配置される。
(もっと読む)
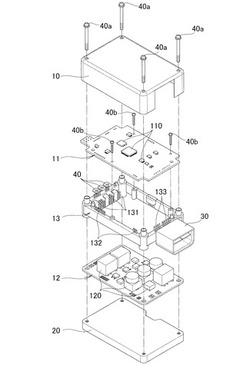
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させる。
【解決手段】電動パワーステアリング用電子制御ユニットに含まれる第1基板11と第2基板12は、外部接続コネクタ30が一体形成されたコネクタケース13を介して積層され、コネクタケースの第1の縁部と第2の縁部には、第1の面実装部品110と第2の面実装部品120とを接続するインサートモールド成形された端子群131,132,133がそれぞれ実装される。第2基板12に実装された第2の面実装部品120のそれぞれは、第1の縁部に実装された端子群と第2の縁部に実装された端子群のうち、近くに位置する端子群に選択的に接続される配線レイアウト構造を有する。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の外に存在する対象物の方位を検出することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号について、前記対象物の方位を見かけ上で所定の角度だけ変化させるように位相回転を行い、当該位相回転を行った結果に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には前記対象物が前記見かけ上で前記方位検出処理における最も狭い方位検出範囲の内に存在すると判定する方位検出部と、を備える。
(もっと読む)
勾配推定装置、勾配推定方法、及び勾配推定プログラム
【課題】路面が他の物体に覆われていても路面の勾配を算出することができる勾配推定装置、勾配推定方法、及び勾配推定プログラムを提供する。
【解決手段】特徴点抽出部は、撮影手段が撮影した画像上の特徴点を抽出し、物体検知部は、前記撮影手段が撮影した画像から物体を表す画像を検知し、勾配算出部は、物体検知部が検知した物体を表す画像における特徴点抽出部が抽出した特徴点の座標と、特徴点の座標の予め定められた時間における移動量と、に基づいて、物体が位置する路面の勾配を算出する。
(もっと読む)
到達時間推定装置、到達時間推定方法、到達時間推定プログラム、及び情報提示装置
【課題】到達時間をより確実に推定することができる到達時間推定装置、到達時間推定方法、到達時間推定プログラム及び情報提示装置を提供する。
【解決手段】画像入力部は、画像信号をフレーム毎に入力し、物体検知部は、画像入力部から入力された画像信号が表す物体を検知し、到達時間算出部は、物体検知部が検知した物体までの方向を表す方向ベクトルに基づいて前記画像信号を撮影した撮影装置の光軸の回転を表す回転行列を算出し、過去の方向ベクトルに前記算出した回転行列を乗じたベクトルと、現在の方向ベクトルとに基づいて前記物体までの距離の変化を算出し、算出した距離の変化に基づいて当該物体までの到達時間を算出する。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の内に存在する対象物が検出されているのか否かを判定することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には当該検出された前記対象物の方位は正しいと判定し、検出された前記対象物の方位が不一致であると判定した場合には当該検出された前記対象物の方位は正しくないと判定する方位検出部と、を備えることを特徴とする。
(もっと読む)
車載用のカメラ装置
【課題】撮影画像の異なる領域について同時に焦点を合わせることができる車載用のカメラ装置を提供する。
【解決手段】車載用のカメラ装置は、画像を撮影する撮像素子101と、前記撮像素子101により撮影する画像の上下方向の一方向において複数の段階で焦点を異ならせる1つ以上のレンズ(図示の例では、レンズ102、レンズ103)を有するレンズ部と、を備えたことを特徴とする。前記レンズ部は、2つ以上のレンズ(図示の例では、レンズ102、レンズ103)を有し、前記複数の段階のそれぞれで撮影対象からの光が通過するレンズの数を異ならせて、焦点を異ならせる、ことを特徴とする。
(もっと読む)
1 - 10 / 105
[ Back to top ]