
株式会社三次元メディアにより出願された特許
1 - 10 / 15
寸法測定装置、シール面間寸法測定装置およびシール面間寸法測定方法
【課題】自動車のドア側のシール面とボディー側のシール面との間のシール面間寸法を正確かつ短時間で測定する。
【解決手段】少なくとも片面に配置された複数のターゲットマーク13を表にして車両のボディー側に取り付けるボディー側ターゲットボード11と、両面に配置された複数のターゲットマークが表裏から見えるように車両のドア側に取り付けるドア側ターゲットボード12と、車両のボディー側のシール面およびドア側のシール面にレーザ光を照射するレーザ光照射部22と、ターゲットボード11、12を撮影するステレオカメラ23と、撮影したレーザ光からボディー側およびドア側のシール面の断面形状を認識し、撮影したターゲットマーク13を用いてボディー側およびドア側のシール面の断面形状を一致させるように移動させ、ボディー側のシール面とドア側のシール面との間のシール面間寸法を測定する画像処理部30と、を有する。
(もっと読む)
3次元計測装置及び3次元計測方法

【課題】1回の撮影で視野全体の3次元形状について、その特徴を漏れなく計測することができる3次元計測装置及び3次元計測方法を提供する。
【解決手段】 複数方向の複数の直線及び/又は曲線状のレーザラインにより構成されるレーザパタンをレーザ投影手段から計測対象物に投影し、該レーザパタンが投影された計測対象物を異なる方向から撮影して第1の画像及び第2の画像を取得し、この第1の画像及び前記第2の画像からレーザラインを抽出し、第1の画像のレーザライン点に対応する第2の画像のレーザライン点の対応点候補の3次元座標を夫々求め、該3次元座標を前記レーザ投影手段に設定される投影手段座標系に変換して前記レーザパタンが構成されているレーザパタン平面に射影した夫々の射影点が前記レーザパタン上にあるか否かを判定することにより、対応点を求める。
(もっと読む)
車両寸法計測装置
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
ロボット制御装置
【課題】認識対象物の3次元認識の結果に基づいて、自動的に認識対象物に対してロボットのハンドによる作業を行わせるためのロボット制御装置を提供する。
【解決手段】 認識対象物5及びハンド3の形状をシミュレーション手段10へ入力して、認識対象物5を把持する際のモデル座標系におけるハンド3及び認識対象物5を離す際のロボットベース座標系における認識対象物5の位置・姿勢を定義し、センサ座標系における認識対象物5の位置・姿勢を求め、これらの情報に基づいて、ハンドが認識対象物5を把持する際のロボットベース座標におけるハンド3の位置・姿勢及び認識対象物5を離す際のロボットベース座標系におけるハンド3の位置・姿勢を求め、この求めたハンド3の位置・姿勢を引数として与えた制御プログラムをロボット2に出力することにより、ロボット2を制御して認識対象物5に対してハンド3による作業を行わせる。
(もっと読む)
エッジ抽出方法及びエッジ抽出装置
【課題】曲部分に対しても高精度にエッジを抽出することができるエッジ抽出方法を提供する。
【解決手段】 画像データに対して平滑化を行うとともに、画素精度のエッジ点を抽出するエッジ点抽出ステップと、抽出した各エッジ点に基づいて、サブピクセルエッジ位置を取得するサブピクセルエッジ位置取得ステップと、前記エッジ点抽出ステップにおいて抽出した各エッジ点、又は前記サブピクセルエッジ位置取得ステップで取得した各サブピクセルエッジ位置における曲率を算出する曲率算出ステップと、前記サブピクセルエッジ位置取得ステップにおいて取得したサブピクセルエッジ位置の座標に対して、前記曲率と前記エッジ点抽出ステップで行った平滑化のスケールの2乗に比例する誤差量の関係式を補正量として用いて、前記サブピクセルエッジ位置を補正するサブピクセルエッジ位置補正ステップと、を含むエッジ抽出方法。
(もっと読む)
3次元物体認識装置及び3次元物体認識方法
【課題】高精度且つ高速に3次元物体を漏れなく認識することができる3次元物体認識装置及び3次元認識方法を提供する。
【解決手段】 認識対象である3次元物体3のモデルをあらゆる姿勢に変化させながら、カメラ画像に射影して得た各姿勢での輪郭モデルを格納した輪郭マップ14及び前記3次元物体3のモデルに含まれる文字等のテクスチャ画像における各姿勢でのテクスチャモデルを格納したテクスチャマップ15を記憶し、認識対象である3次元物体3を所定方向から撮像手段4により撮影して画像を取得し、取得した原画像に基づいて、該原画像の解像度を異なる比率で低下させたピラミッド画像を作成し、解像度が最も低い前記ピラミッド画像に対して各姿勢での輪郭モデル及びテクスチャモデルをあらゆる位置に移動させながら、前記3次元物体3の位置及び姿勢を評価する。
(もっと読む)
撮像装置
【課題】撮影対象となる被写体の状態が変化することなく、投光状態の異なる画像を取得することができる撮像装置を提供する。
【解決手段】 被写体Xを投光する投光手段5と、被写体Xを撮影して画像データを取得する撮像手段3と、投光手段5の投光タイミング及び撮像手段3の撮影タイミングを制御するタイミング制御手段6と、取得した画像データを蓄積する画像データ蓄積手段7と、該画像データ蓄積手段7に蓄積された画像データをコンピュータ11へ転送するインターフェース12と、を備え、タイミング制御手段6は、撮像手段3に連続撮影させるとともに、投光手段5による投光状態を連続撮影に同期させて切り替え、画像データ蓄積手段7は、連続撮影された画像データを蓄積し、連続撮影が終了すると、画像データ蓄積手段7に蓄積された画像データをインターフェース12を介してコンピュータ11へと転送する。
(もっと読む)
3次元物体認識装置、並びに3次元物体認識プログラム及びこれが記録されたコンピュータ読み取り可能な記録媒体
【課題】 2次元画像における輪郭などの特徴から3次元物体を認識する3次元物体認識装置において、隠れの影響を排除してロバスト性を向上させるとともに、位置及び姿勢を最適化して認識精度を高める手段を提供する。
【解決手段】 本発明に係る3次元物体認識装置は、3次元物体を撮影するカメラと、3次元物体の位置及び姿勢を変化させながらカメラ画像に投影し、各投影点の座標及びエッジの向きを算出する手段と、それに基づいて作成したルックアップテーブルを記憶する手段と、ピラミッド画像を作成する手段と、解像度が最も低いピラミッド画像についてエッジを抽出する手段と、方向付きディスタンスマップを作成する手段と、方向付きディスタンスマップ上に各投影点をマッピングする手段と、位置及び姿勢を評価する手段と、位置及び姿勢を最適化する手段と、を備えるものである。
(もっと読む)
3次元座標測定装置
【課題】 被測定物を異なる角度から撮影した複数の画像から被測定物の3次元座標を測定する3次元座標測定装置において、背景光,水銀灯の光,或いは被測定物で反射したストロボ光の影響を排除する手段を提供する。
【解決手段】 本発明に係る3次元座標測定装置1は、光を反射する反射材14,15が設けられ車両Sに取り付けられるターゲット板2と、車両Sの画像を撮影する複数台の撮像装置3と、車両Sに対して光を照射するストロボ装置4と、同一のターゲット板2を異なる角度から撮影した複数枚の画像に基づいて車両Sの3次元座標を算出する画像処理装置5とを備え、ターゲット板2における少なくとも反射材14,15の表面に、ストロボ装置4から発せられた光のうち特定の色の光だけを透過するカラーフィルター16,17が設けられたものである。
(もっと読む)
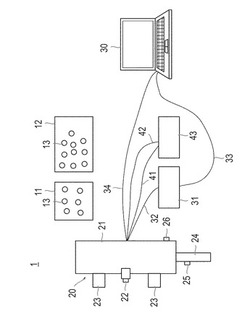
寸法測定方法及び寸法測定装置
【課題】 測定対象物及び該測定対象物の面上に配置された基準長を示す基準尺を含む1つの画像から前記測定対象物の各辺の寸法を測定する寸法測定装置を提供する。
【解決手段】 直方体形状の測定対象物1及び該測定対象物1の面上に予め配置された基準長を示す基準尺2を含む画像を撮像する撮像手段20と、該撮像手段20により撮像された前記画像から前記測定対象物1の頂点及び前記基準尺2を抽出する画像処理手段と、抽出された前記頂点の前記画像平面上における2次元座標から前記測定対象物1の3次元空間における位置・姿勢及び寸法のパラメータを求め、前記基準尺2を用いて、実空間における距離と前記3次元空間における距離との比率である空間のスケールを求め、該空間のスケール及び前記パラメータに基づいて、前記測定対象物1の各辺の寸法を算出する寸法算出手段と、を備える寸法測定装置100。
(もっと読む)
1 - 10 / 15
[ Back to top ]