
イースロジック株式会社により出願された特許
1 - 1 / 1
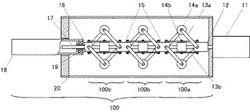
アクチュエータ装置およびこれを用いるロボット装置
【課題】動力停止時には外力により関節等を容易に動かすことができ、定常的に大きな負荷が作用した場合にも効率を損なわず、アクチュエータ自体を湾曲設置可能として柔軟に配置できるようにしたアクチュエータ装置およびロボット装置を提供する。
【解決手段】モータの回転を線方向の動作に変換するアクチュエータ装置において、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上設けて構成する。
(もっと読む)
1 - 1 / 1
[ Back to top ]