
Fターム[2B034BG07]の内容
土作業機(その他) (8,058) | 制御装置又は報知装置 (134) | 報知装置 (13)
Fターム[2B034BG07]に分類される特許
1 - 13 / 13
代かき作業機の耕深表示装置
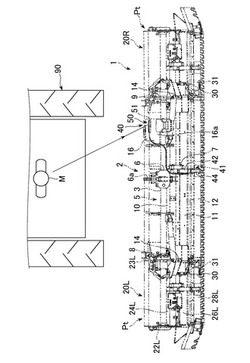
【課題】代かき作業時に耕深を一定にすることができ、耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供する。
【解決手段】耕深表示装置40は、回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設された第1整地板11とこの後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備えて走行機体90に装着される代かき作業機1に搭載される。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され耕耘ロータの耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動するリンク機構部41と、この回動に応じて耕深を表示する耕深表示部50とを有する。耕深表示部50は、走行機体90に搭乗した作業者Mが代かき作業1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に設けられる。
(もっと読む)
代かき作業機の耕深表示装置

【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
畦塗り機
【課題】トラクタに装着する畦塗り機で遠隔操作により少なくとも畦形成部の回転を変更することができる畦塗り機を提供することを目的とする。
【解決手段】トラクタ200に装着して畦塗り作業を行う畦塗り機において、耕耘軸61aを回転させて圃場の土を盛り上げる耕耘部61と、前記耕耘部の進行方向後方で回転しながら盛り土を締め固めて新畦を形成する畦形成体62と、遠隔操作可能な操作部81と、操作部81の操作信号を受信し畦形成体62の回転を制御する制御部41とを有し、操作部81の操作により、畦形成体62の回転を耕耘部61との回転とは独立して変更可能とする。
(もっと読む)
水田作業機
【課題】使用者が機体操縦部から機体後方下方側を覗き込む等の煩わしさの無い状態で整地装置の状態を確認することができ、操作性の向上を図ることが可能な水田作業機を提供する。
【解決手段】機体と水田作業装置との間に横方向に沿う軸芯周りで回転駆動される整地ロータ50を備えた整地装置が備えられ、この整地装置が、整地作業を行う作業状態と作業を行わない非作業状態とに切り換え自在に構成され、整地ロータ50の整地深さを表示する表示装置Fと、整地装置が作業状態であれば表示装置Fを整地ロータ50の整地深さを表示する表示状態に切り換え、整地装置が非作業状態であれば表示装置Fを整地ロータ50の整地深さを表示しない非表示状態に切り換える制御装置Hとが備えられている。
(もっと読む)
オフセット作業機
【課題】農作業を行う作業部をオフセット移動可能で、現在の作業部の状態を確認することのできる表示部を有するトラクタに装着するオフセット作業機を提供することを目的とする。
【解決手段】農作業を行う作業部20をオフセット移動可能でトラクタ1に装着するオフセット作業機2において、表示部51と、センサ41とを有し、表示部51は、センサ41からの情報によりオフセット移動による作業部20の位置を示す現在オフセット位置51aと、あらかじめ設定されている設定オフセット位置51bとを表示することで上記課題を解決する。
(もっと読む)
農作業機
【課題】トラクタからの回転動力を伝達する伝動部の途中に有する動力伝達部で回転差が生じているか否かを検出するトラクタに装着する農作業機を提供することを目的とする。
【解決手段】トラクタからの回転動力を入力し入力した回転動力を伝動部で伝動させて作業部で出力して農作業を行うトラクタに装着する農作業機において、伝動部に一定条件下での動力を伝達する動力伝達部10を介在し、動力伝達部10より入力側の伝動部の回転を検知する第1の検知部4と、動力伝達部10より出力側の伝動部の回転を検知する第2の検知部5と、2つの検知部4、5からの情報を取得し動力伝達部10で回転差が生じているか否かを検出する制御部2とを有することで上記課題を解決する。
(もっと読む)
オフセット作業機
【課題】トラクタに装着されトラクタを旋回後トラクタを停止させたまま作業部を直進させて作業を行う場合に作業者の意図をより正確に実現し、安全に作業を行うことができる機能を有するオフセット作業機を提供することを目的とする。
【解決手段】制御部3による制御は、トラクタ15の旋回中はアクチュエータ7を作業部27が直進するように制御し、その後、トラクタが旋回後の停止位置においては、スイッチ5aが操作されている間だけアクチュエータ7のみの制御により作業部27を直進させ、スイッチ5aが操作されなくなると作業部27は直進を中止することにより上記課題を解決する。
(もっと読む)
オフセット作業機及び制御方法
【課題】走行機体の進行に沿ったオフセット位置で圃場隅部までの連続的な前進作業を可能にする。
【解決手段】畦塗機100は、走行機体のオフセット位置で作業可能な作業部120と、この方向と位置の基準値を設定する記憶部と、作業部の方向及び位置を検出する角度センサ150及び位置センサ151と、作業部の方向及び位置を調整する方向シリンダ141及びオフセットシリンダ140と、これらのシリンダの駆動を制御する制御手段160を備える。制御手段160は、作業部の位置と方向を所定状態に維持して走行機体の走行に沿って作業部が作業する通常作業モード、予め設定された作業部の方向と位置を基準値とし、走行機体の走行方向の変化に伴う作業部の位置と方向の変化を調整して直線状作業を維持する自動直進作業制御モード、このモード終了時の位置を起点とし、圃場隅部に残存する未作業部分を直線状又は円弧状に作業する自動隅部作業制御モードを有する。
(もっと読む)
均平作業方法
【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにした均平方法である。
(もっと読む)
移植機
【課題】植付作業機の前方に整地ロータを設け、この整地ロータを圃場面に接地する作用位置と圃場面から離間した収納位置に変更可能になした移植機において、整地ロータへの駆動力の伝達を断ち、且つ整地ロータを接地させた状態のもとで誤って植付走行を行って圃場面を荒らすことがないように報知手段を設ける。
【解決手段】植付作業機15に対する整地ロータ34の相対的な高さを検出する高さ検出手段73と、整地ロータ34への駆動力の入切を検出する入力検出手段74を設け、前記高さ検出手段73によって整地ロータ34が作用位置にあることを検出すると共に、前記入力検出手段74によってロータ34への駆動力の切状態を検出した時、当該植付作業機15の接地走行を防止すべく報知手段76,77を作動させるように構成した。
(もっと読む)
農作業機
【課題】効率良く作業ができ、かつ畦道等を通る人や車等に注意を促すことができる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する左右方向に長手状の作業機本体11を備える。作業機本体11はフレームパイプ部4を有し、フレームパイプ部4の長手方向両端部にはチェーンケース部6およびブラケット部7を設ける。チェーンケース部6の上端部およびブラケット部7の上端部には、作業機本体11の側端部位置を視認するための光発生手段13を設ける。
(もっと読む)
農作業機
【課題】操作性に優れた農作業機を提供する。
【解決手段】農作業機は、作業機本体部と、作業機本体部の両端部に回動可能に設けた折畳作業部と、折畳作業部を回動させるための操作部41とを備える。操作部41は、折畳作業部を閉じ方向に回動させる際に押動操作する作動用ボタン52を有する。操作部41は、作動用ボタン52の押動操作中のみ折畳作業部が回動する手動モードと作動用ボタン52の一度の押動操作により折畳作業部が設定状態になるまで回動する自動モードとの切換えの際に、押動操作するモード切換用ボタン55を有する。
(もっと読む)
畦塗り装置
【課題】耕耘作業部に対し畦面成形円盤を有する畦塗り装置を簡単に位置決め固定すると共に、畦成形を簡潔で廉価な構成によってスムーズに行うことができる畦塗り装置を提供する。
【解決手段】走行機体1cに装着される耕耘作業部3が有するツールバー13に、耕土を畦Aに塗り付ける畦塗り装置2を着脱可能に設け、該畦塗り装置2の横軸回転する畦面成形円盤26を耕耘作業部3の後方で畦側に位置させると共に、畦面成形円盤26の外輪部30から畦側に向けて耕土を誘導する円錐状の畦成形面31を形成した。
(もっと読む)
1 - 13 / 13
[ Back to top ]