
Fターム[2B043AB11]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 操作性又は取扱い性の向上 (133)
Fターム[2B043AB11]の下位に属するFターム
着脱又は装着の容易性 (10)
保守、点検又は清掃の容易性 (13)
Fターム[2B043AB11]に分類される特許
1 - 20 / 110
苗移植機
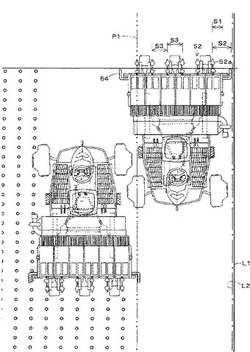
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
苗移植機

【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
伸縮作業いす
【課題】着座状態で多方向を向いての作業を可能にし作業効率を向上、維持させるとともに労働者の体への負担軽減を可能にする。
【解決手段】本願の伸縮作業いすは畝上、畝溝上で移動可能な座板と臀部安定板により労働者にあった作業位置で多方向に座り、移動しながらの作業を可能にした農作業用の実用的ないすである。車輪を設け移動しながらの手入れ、種蒔き、収穫作業をする事が出来る。畝幅、労働条件に合せて幅と高さを調整し、座板を労働者にあった位置に据え付けることで、一定方向に限定されていた作業範囲を開放した。一定方向を向いての作業を開放することにより労働者は自身にあった作業体勢で作業ができ、長時間の作業の場合は着座位置を変更しながら楽な体勢で作業を維持、継続することができる。また座板に臀部安定板を組付けることにより臀部が安定板に緩衝することで走行移動を補助し、また、体の安定性を図った。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
苗移植機
【課題】圃場の浅い深いに拘わらず、常に直進の指標となるマークを圃場に引くことができる線引きマーカ1を備えた苗移植機を提供すること。
【解決手段】車体5の後側に複数条分の苗を積載する苗タンク20と植付装置7と苗タンク昇降用のリンク機構6を備え、圃場に植え付けた苗の上方に位置して直進の目安とするサイドマーカ57と圃場面に接触して直進の目安となる線を引く線引きマーカ1と任意の植付装置7の駆動を入切する部分条クラッチの入切を行う部分条クラッチレバーを設け、 圃場の深浅に合わせてサイドマーカ57の上下位置を自動調節するサイドマーカ自動調節機構と部分条クラッチレバーの操作に合わせて線引きマーカ1の左右位置が自動的に変更される線引きマーカ位置自動変更装置を備えた苗移植機である。
(もっと読む)
水田作業車
【課題】水田作業車において、右又は左のマーカーが自動的に作用姿勢に操作される機能及び作業装置が自動的に作業状態に操作される機能を備えた場合、両方の機能を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
移植機
【課題】単一の操作具の単純な操作により移植作業を誤操作をすることなく容易に行うと共に、部品点数を削減する。
【解決手段】単一の操作レバー25上下方向の操作により植付装置の昇降を行い、該操作レバー25の前後方向の操作により左右マーカの振出し方向を設定する。3位置切換えスイッチ29は、作業機準備スイッチ30がオフの場合、方向指示器を操作する。上記スイッチ30がオンの場合、切換えスイッチ29は、両出し、自動、停止の各マーカモードに切換える。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
移植機
【課題】制御部による線引きマーカの制御モードに、前記植付作業機の昇降動作毎に左右の線引きマーカの内何れの線引きマーカを振り出すかを交互に切り換える自動モードを有した移植機において、同方向の線引きマーカを振り出したい植付行程が連続する際に、各行程間の移植機の操作の煩雑さを軽減する。
【解決手段】制御部34による線引きマーカ16の制御モードに植付作業機11の昇降動作毎に左右の線引きマーカ16の内何れの線引きマーカ16を振り出すかを交互に切り換える自動モードを有した移植機において、制御部34に、自動モードと、植付作業機11の下降に伴って左右の線引きマーカ16の内任意の一方の線引きマーカ16のみを振り出す片落ちモードと、に切換えるマーカモード設定手段34cを備える。
自動モード、及び片落ちモードにおいて、線引きマーカ16の振出方向を人為的に選択切換え可能な振出方向選択手段34dを備える。
(もっと読む)
乗用型作業車
【課題】 運転者が車体から降りて操向操作する際に、車体が前後方向で大きく傾斜したり、障害物がある場合には、車体を即座に停止させないと危険であり、その運転者が車体から降りて確実に然も容易に車体を停止させる課題がある。
【解決手段】 車体前部に収納位置から作用位置へ切替操作する左右の把持アーム(83)を設け、車体の左右中央となる左右の把持アーム(83)間には空隙(B)を設け、車体の前部左右中央にはセンターマーカーを設け、空隙(B)により前記作用位置への切替操作で左右の把持アーム(83)がセンターマーカーに干渉しない構成とした。
(もっと読む)
歩行型作業機
【課題】移動作業及び移動作業以外の各種作業の、両方において、作業性が高い歩行型作業機を提供する。
【解決手段】歩行型作業機10は、動力源12L,12Rと、走行部13L,13Rと、操作ハンドル14L,14Rと、作業者が操作ハンドルと共に握っているときだけオン位置に変位して走行部を走行可能なオン状態に切替操作する走行準備レバー41と、オン位置にある走行準備レバーをそのままオン位置に保持するように操作するレバー保持操作機構50と、レバー保持操作機構によって走行準備レバーをオン位置に保持していることを検知するオン位置検知部61と、オン位置検知部の検知を受けて走行部の走行速度が制限速度を超えないように制限する速度制限部とを備える。速度制限部は制御部75に有する。
(もっと読む)
移植機
【課題】線引きマーカの収納忘れを防止した移植機を提供する。
【解決手段】機体左側の線引きマーカは、作業機操作レバーが後方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わり(ステップS44〜S47)、機体右側の線引きマーカは、作業機操作レバーが前方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わる(ステップS48〜S51)。また、これら左右の線引きマーカは、マーカ自動スイッチが切操作されると、両上げ状態となり、マーカ自動スイッチが入操作されると、両上げ状態まえの姿勢に復帰する(ステップS52〜S54)。
(もっと読む)
移植機
【課題】操作性が良くかつ迅速に振出し方向の切換えを行うことのできる線引きマーカを備えた移植機を提供する。
【解決手段】植付部が上方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、左右の線引きマーカが共に作業姿勢になる両落ち状態が設定され、この両落ち状態が設定された状態で再度、作業機操作レバーを再度前方側に操作すると、機体左側の線引きマーカが収納姿勢に設定される(ステップS54〜S59)。また、植付部が下方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、機体左側の線引きマーカが収納姿勢に設定されると共に、機体右側の線引きマーカが作業姿勢に設定される(ステップS54,S55,S58,S59)。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
田植機
【課題】操作感の良い線引マーカを備えた田植機を提供する。
【解決手段】走行機体の機体外側に振り出されて、植付け次工程における走行予定線を圃場面に線引きする左右一対の線引マーカ10Rは、マーカモータ15によって駆動されると共に、作業機操作レバーによって操作される。機体右側の線引マーカ10Rは、作業機操作レバーの前方側への傾倒操作により非作業位置Aから作業位置Bへと振り出されると共に、機体左側の線引マーカは、作業機操作レバーの後方側への傾倒操作により非作業位置Aから作業位置Bへと振り出される。これら左右の線引マーカ10Rが共に作業位置Bにある両下げ状態において、作業機操作レバーが前方側へ傾倒操作されると、機体右側の線引マーカ10Rは作業位置に維持されると共に、機体左側の線引マーカは作業位置Bから非作業位置Aへとなり、左右の線引きマーカの振出しが切換わる。
(もっと読む)
1 - 20 / 110
[ Back to top ]