
Fターム[2B043AB15]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 作業性能向上 (110)
Fターム[2B043AB15]の下位に属するFターム
傾斜地に適用 (8)
湿田又は軟弱路面に適用 (23)
Fターム[2B043AB15]に分類される特許
1 - 20 / 79
苗移植機
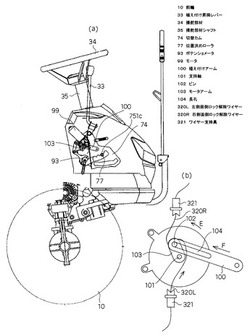
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
苗移植機

【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
伸縮作業いす
【課題】着座状態で多方向を向いての作業を可能にし作業効率を向上、維持させるとともに労働者の体への負担軽減を可能にする。
【解決手段】本願の伸縮作業いすは畝上、畝溝上で移動可能な座板と臀部安定板により労働者にあった作業位置で多方向に座り、移動しながらの作業を可能にした農作業用の実用的ないすである。車輪を設け移動しながらの手入れ、種蒔き、収穫作業をする事が出来る。畝幅、労働条件に合せて幅と高さを調整し、座板を労働者にあった位置に据え付けることで、一定方向に限定されていた作業範囲を開放した。一定方向を向いての作業を開放することにより労働者は自身にあった作業体勢で作業ができ、長時間の作業の場合は着座位置を変更しながら楽な体勢で作業を維持、継続することができる。また座板に臀部安定板を組付けることにより臀部が安定板に緩衝することで走行移動を補助し、また、体の安定性を図った。
(もっと読む)
苗移植機
【課題】旋回後に苗の植付開始位置を適切な位置に揃えることができる苗移植機を提供すること。
【解決手段】苗移植機に、旋回時又は後進時には植付部52を自動的に上昇させ、前進時には植付部52を下降させる自動昇降機構Aと、植付部52の昇降動作及び苗植付動作の入切動作を行う植付昇降レバー33と、植付部52を上昇させた状態で後進させると後輪回転センサ182により検知される後進時の回転数が予め設定された基準回転数を上回ると自動昇降機構Aを作動させない制御構成とする制御装置200を設けたので、旋回後に植付部52を下降させて苗の植え付けを再開する際に、作業者は植付昇降レバー33を手動操作して植付部52を下降させることができるので、旋回後の苗の植付開始位置を適切な位置に揃えられ、苗の植付精度が従来より向上する。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 旋回開始時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上でなく直進状態に戻した操作状態であることを条件に、更にその後、前記カウントが植付部を下降させたときの第一の所定値よりも大きい第二の所定値になったとき、植付クラッチを入にする連動制御を備え、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上であれば、連動制御を終了する制御装置を設けた田植機とした。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】アクチュエータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が備えられ、機体の旋回走行の開始に伴って旋回行程中における機体の位置を検出する機体位置検出手段51と、機体位置検出手段51の検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置にあるときに、アクチュエータM3を作動状態側に切り換える作動部操作手段53とを備える。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
薬液散布作業車両
【課題】GPSからの速度情報が気象、地形などの影響を受けて得難い場合にも車速を知ることができ、得られた車速に基づき薬液散布量が制御可能な薬液散布作業車両を提供すること。
【解決手段】位置情報と速度情報をGPSから受信できるGPS受信機81と車輪12又は13の回転数を検出する車速センサ4と薬液を吐出する防除ポンプ65による薬液吐出圧力に応じて薬液散布量を調節する防除機Bを備えており、GPSからの情報に基づき車速VG及び/又は車速センサ4による車速Vs又は車速VGと車速Vsの平均化された車速と、予め設定された単位面積当たりの薬液散布量Aとの関係から防除ポンプ65の吐出圧力を計算し、該吐出圧力計算値に一致するように薬液流量調節弁73の開度の調整をして予め設定された単位面積当たりの薬液散布量Aが均一になるように制御する制御装置100,101を備えている薬液散布作業車両である。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
作業車両
【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
作業機
【課題】 本発明は、機体の小回り旋回性を維持しながら、各種の状況に応じて適切に圃場が荒れるのを抑えることを課題とする。
【解決手段】 操向手段の操作を検出する旋回角度センサ(193)と、ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して操向内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して操向内側のサイドクラッチを常時入状態にする旋回連動機構と、耕盤の深さを検出する耕盤深さセンサ(48)を設け、耕盤が深いことを耕盤深さセンサ(48)により検出すると、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更する制御装置(163)を備えた作業機とした。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
1 - 20 / 79
[ Back to top ]